


A Comprehensive Evaluation of Machine Learning and Classical Approaches for Spaceborne Active-Passive Fusion Bathymetry of Coral Reefs
 , , ,
, , ,
Abstract
:1. Introduction
2. Study Area and Data
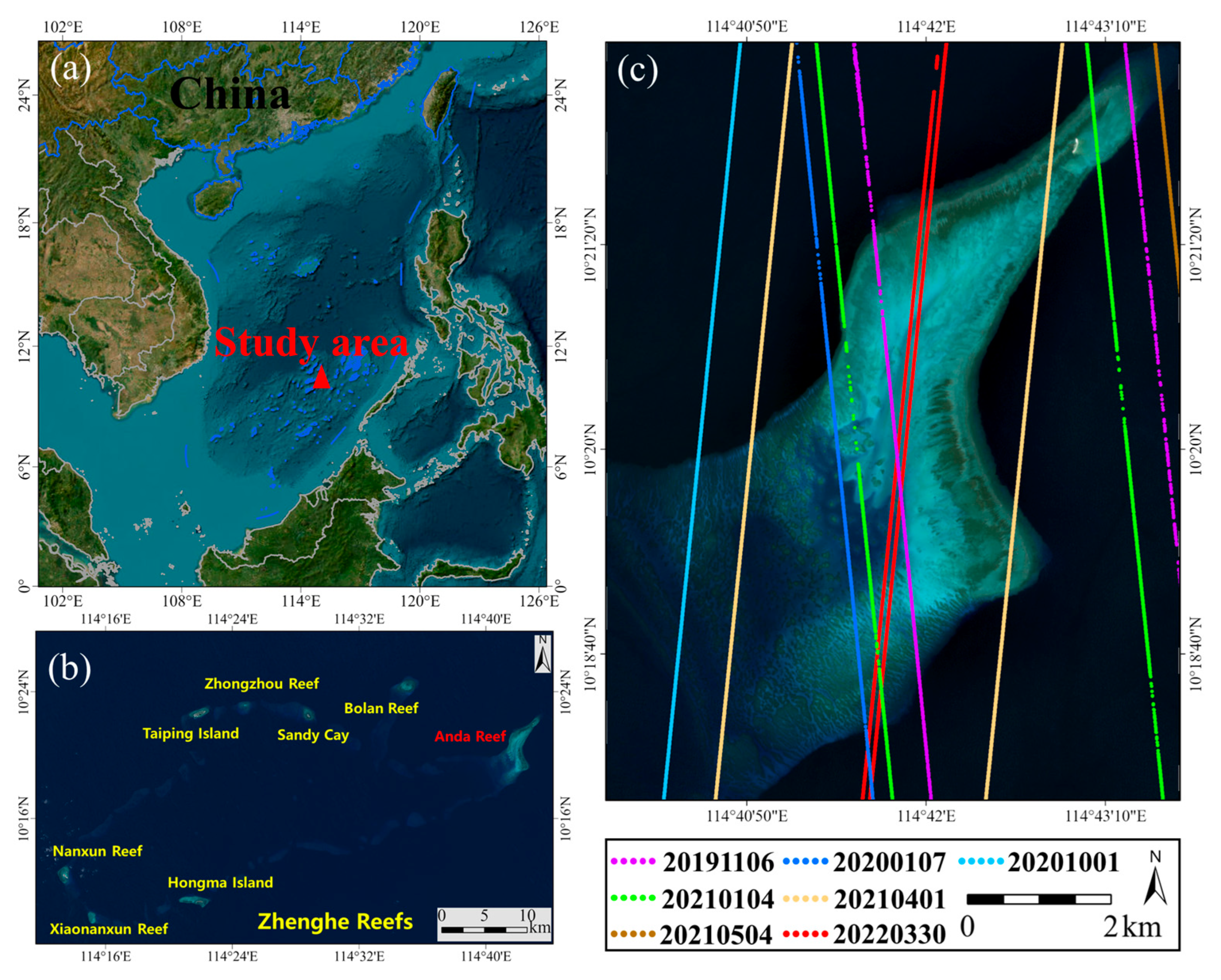
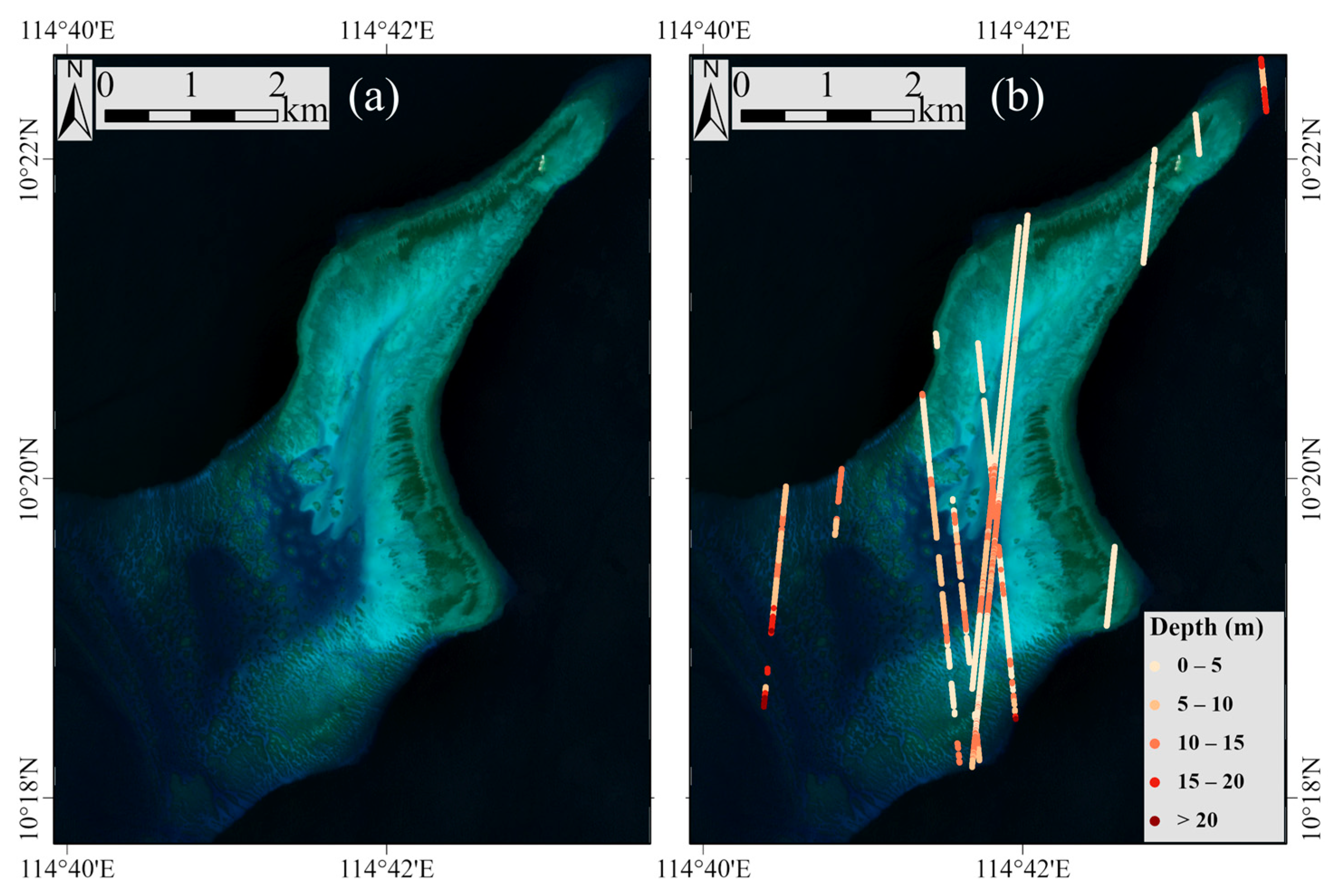
2.1. Study Area
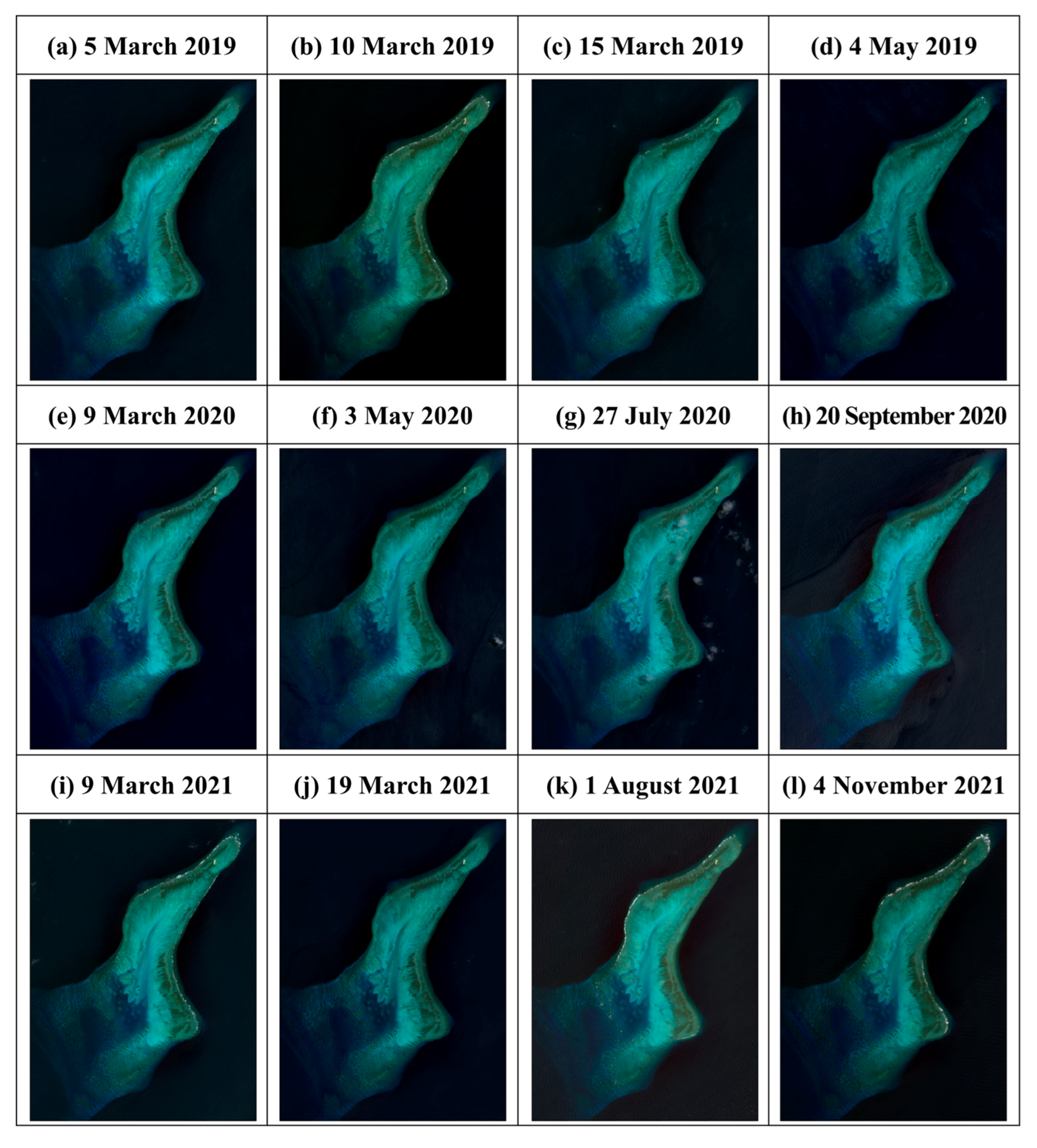
2.2. Sentinel-2 Imagery
2.3. ICESat-2 Datasets
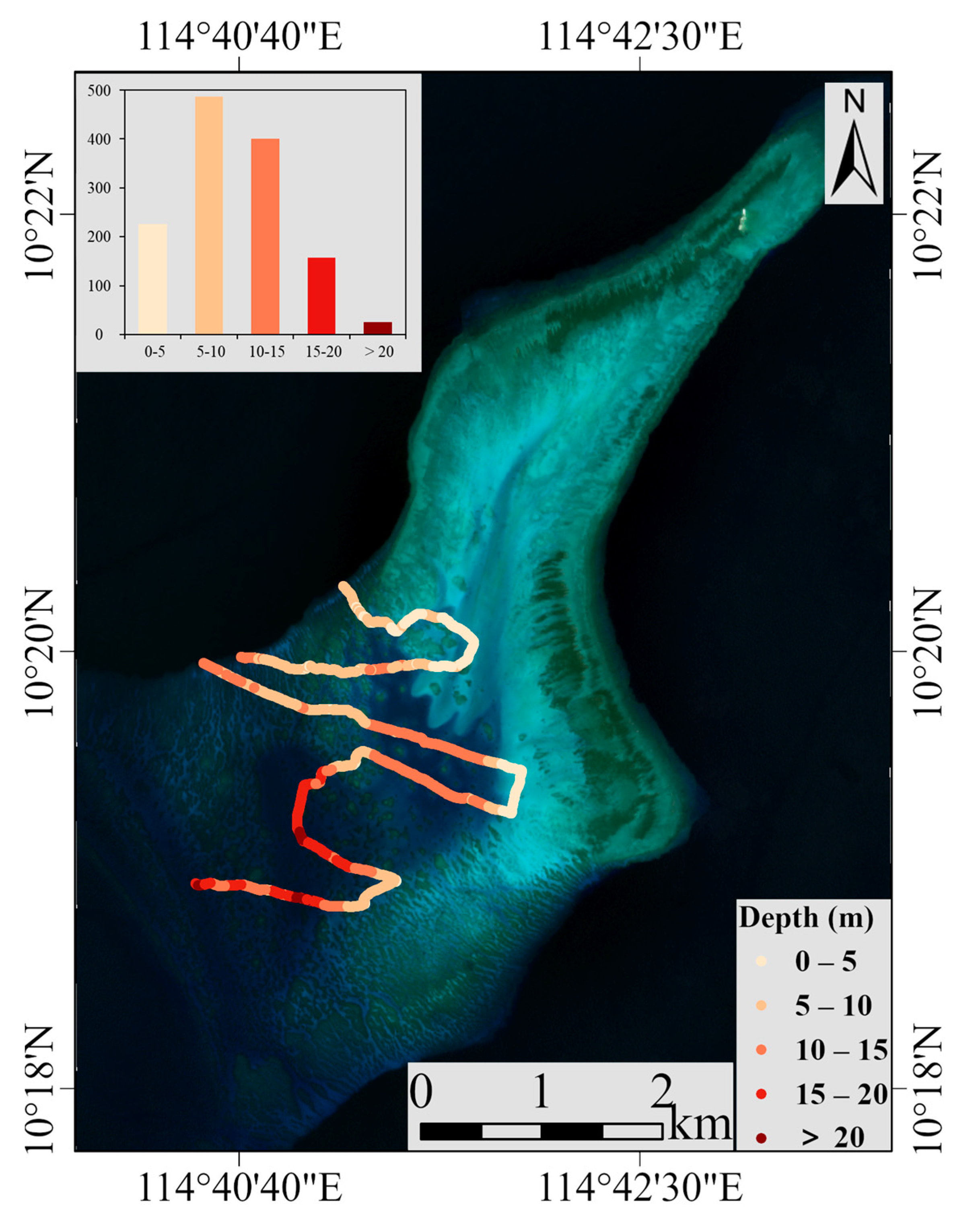
2.4. In Situ Sonar Data
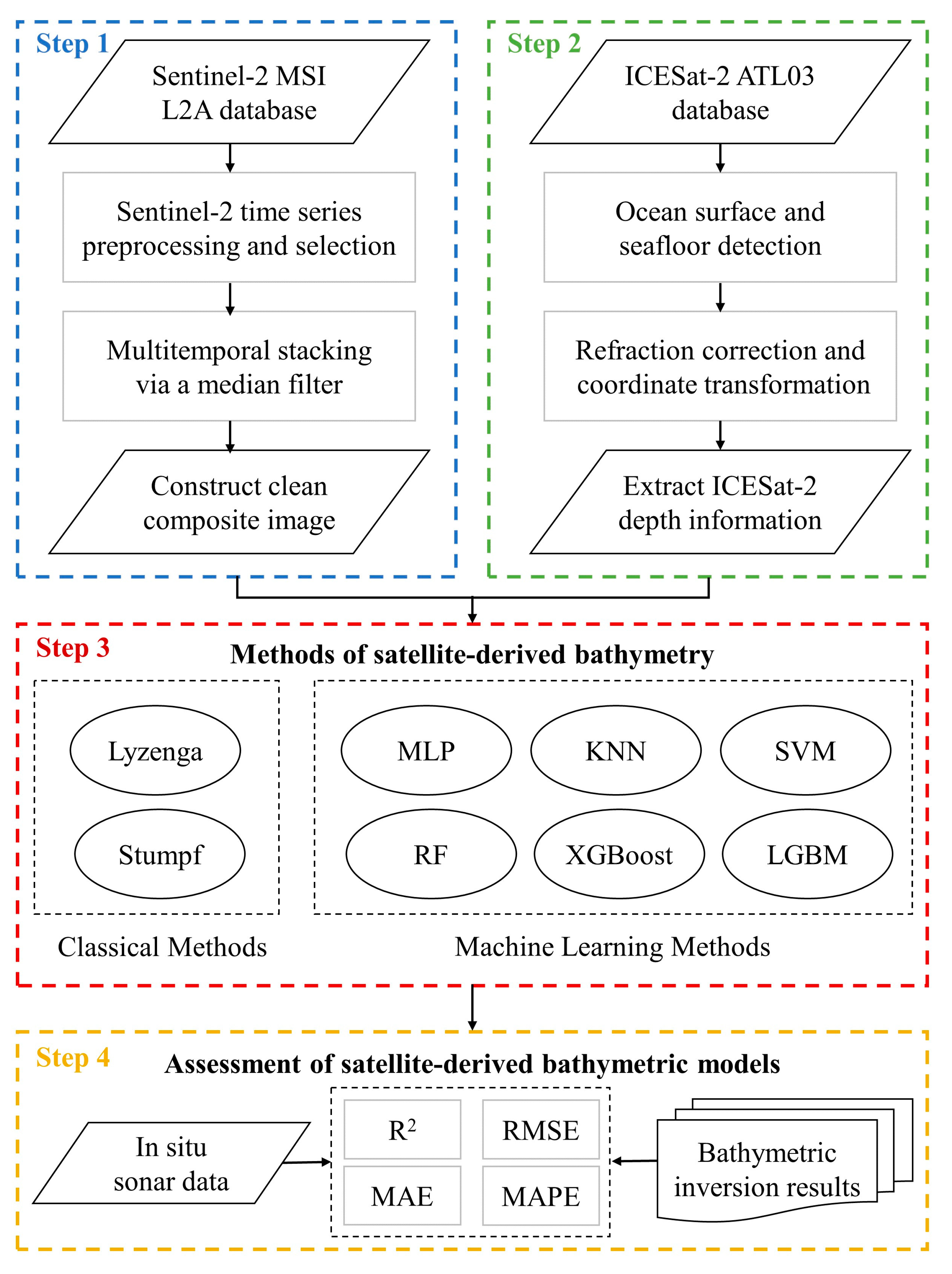
3. Methods
3.1. Sentinel-2 Data Preprocessing
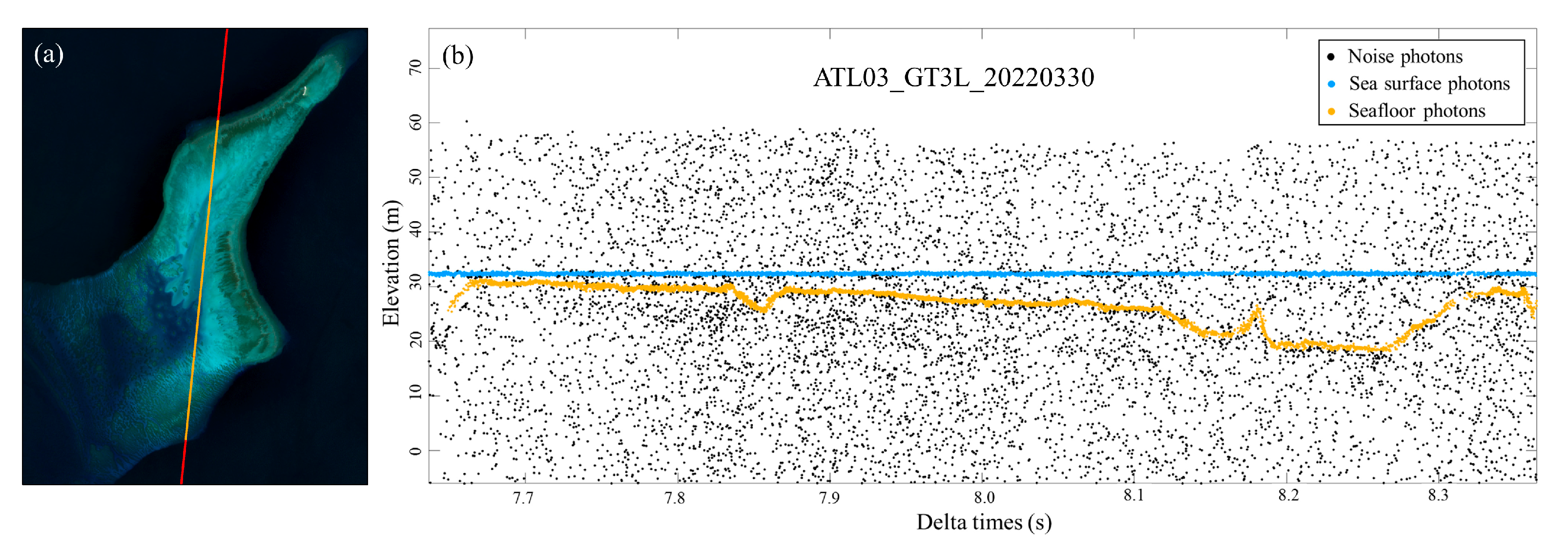
3.2. ICESat-2 Bathymetric Point Extraction
3.3. Methods of SDB
3.3.1. Classical Methods
- (1)
- Lyzenga
- (2)
- Stumpf
3.3.2. Machine Learning Methods
- (1)
- MLP
- (2)
- KNN
- (3)
- SVM
- (4)
- RF
- (5)
- XGBoost
- (6)
- LGBM
3.4. Accuracy Assessment
4. Results
4.1. Optimal Sentinel-2 Imagery and ICESat-2 Bathymetric Points
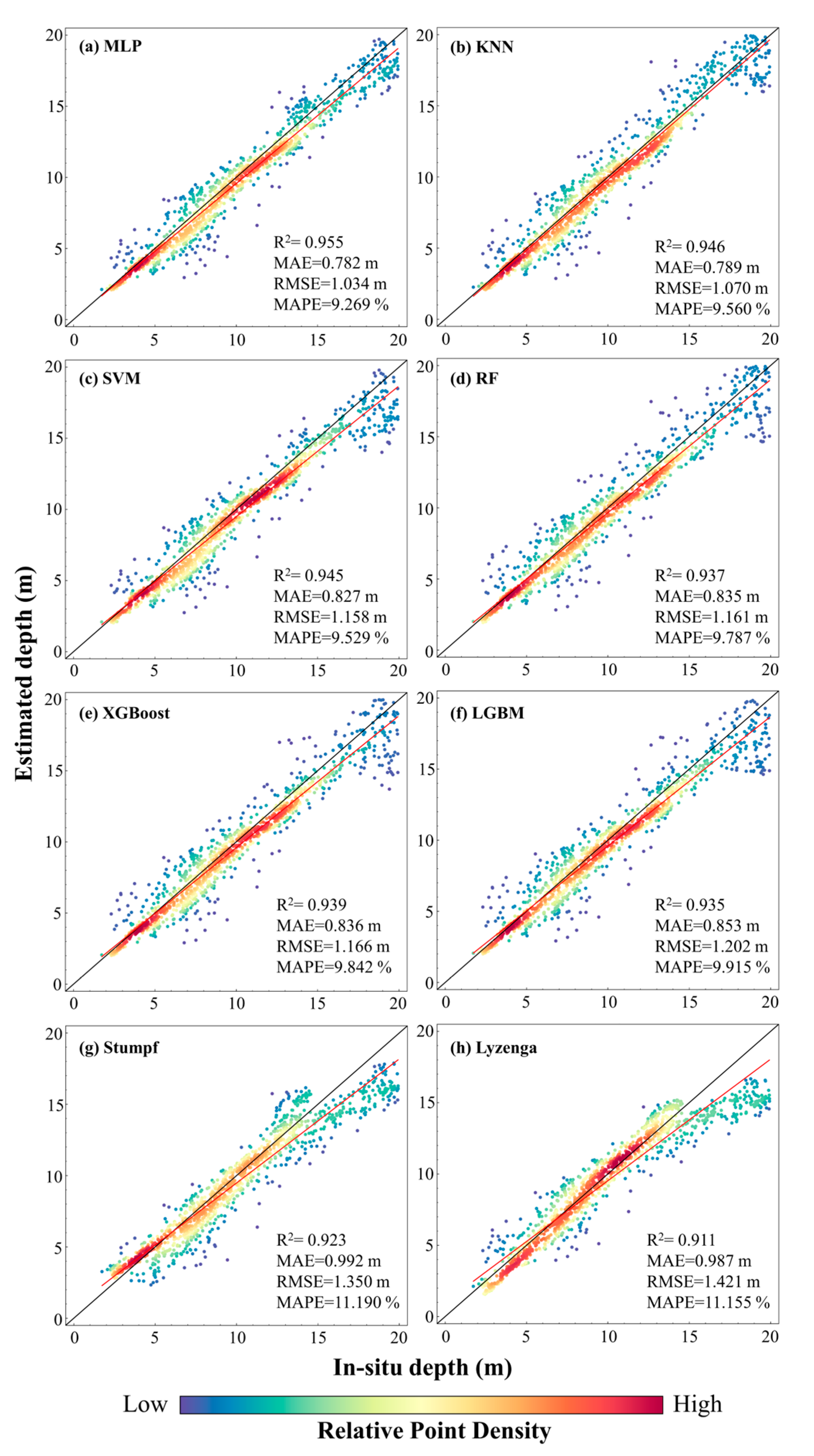
4.2. Accuracy Assessment of SDB Models
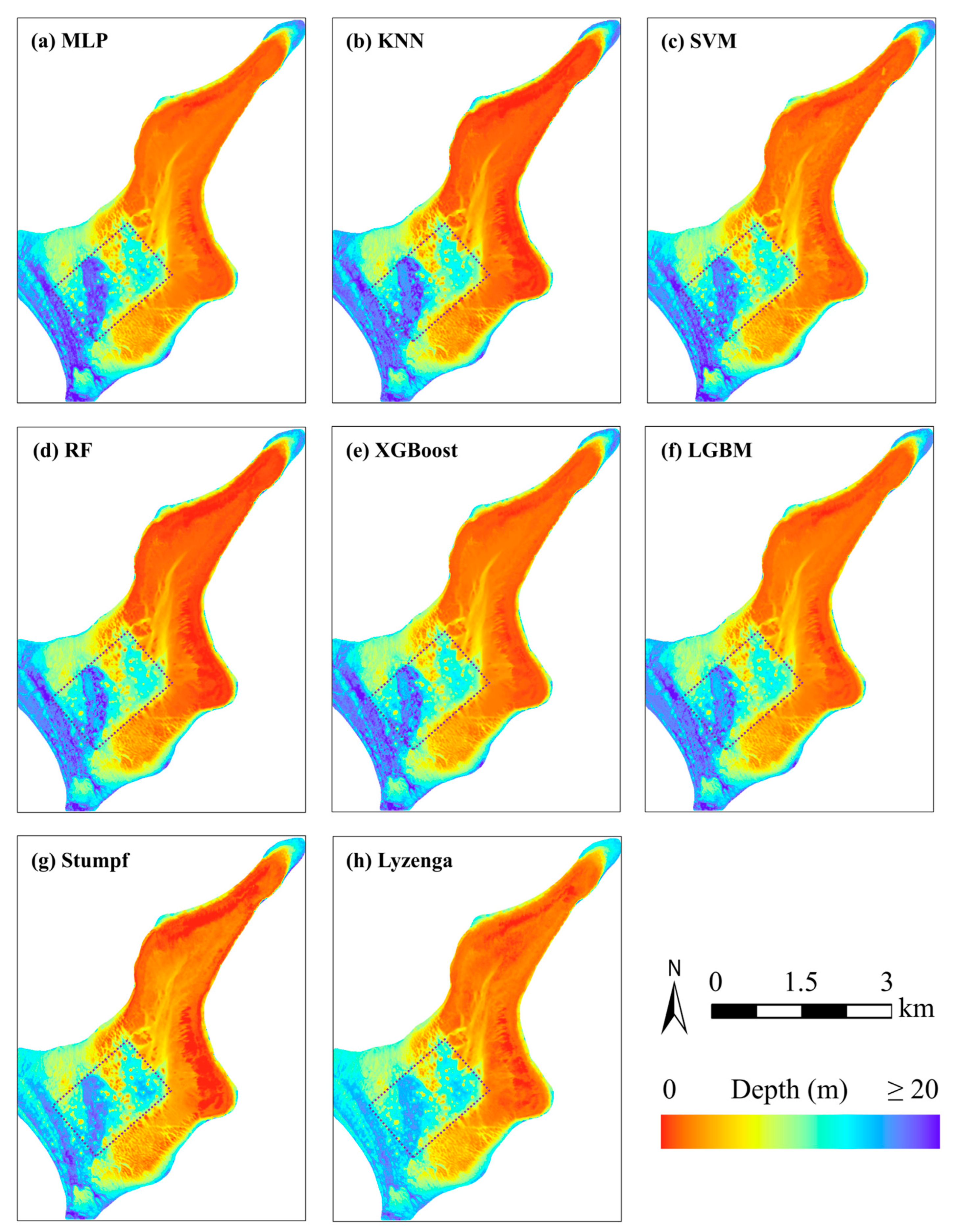
4.3. Bathymetric Mapping of SDB Models
5. Discussion
5.1. Comparative Analysis of SDB Models
5.2. Application Perspectives and Potential Limitations of SDB Models
5.2.1. Application Perspectives of SDB Models in the Spratly Islands
5.2.2. Potential Limitations Analysis of SDB Models
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Caballero, I.; Stumpf, R.P. Confronting turbidity, the major challenge for satellite-derived coastal bathymetry. Sci. Total Environ. 2023, 870, 161898. [Google Scholar] [CrossRef]
- Cesbron, G.; Melet, A.; Almar, R.; Lifermann, A.; Tullot, D.; Crosnier, L. Pan-European Satellite-Derived Coastal Bathymetry—Review, User Needs and Future Services. Front. Mar. Sci. 2021, 8, 740830. [Google Scholar] [CrossRef]
- Eugenio, F.; Marcello, J.; Mederos-Barrera, A.; Marqués, F. High-Resolution Satellite Bathymetry Mapping: Regression and Machine Learning-Based Approaches. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1–14. [Google Scholar] [CrossRef]
- Zhang, X.; Ma, Y.; Li, Z.; Zhang, J. Satellite derived bathymetry based on ICESat-2 diffuse attenuation signal without prior information. Int. J. Appl. Earth Obs. Geoinf. 2022, 113, 102993. [Google Scholar] [CrossRef]
- Chen, Y.; Le, Y.; Zhang, D.; Wang, Y.; Qiu, Z.; Wang, L. A photon-counting LiDAR bathymetric method based on adaptive variable ellipse filtering. Remote Sens. Environ. 2021, 256, 112326. [Google Scholar]
- Kutser, T.; Hedley, J.; Giardino, C.; Roelfsema, C.; Brando, V.E. Remote sensing of shallow waters–A 50 year retrospective and future directions. Remote Sens. Environ. 2020, 240, 111619. [Google Scholar] [CrossRef]
- Babbel, B.J.; Parrish, C.E.; Magruder, L.A. ICESat-2 elevation retrievals in support of satellite-derived bathymetry for global science applications. Geophys. Res. Lett. 2021, 48, e2020GL090629. [Google Scholar] [CrossRef]
- Thomas, N.; Pertiwi, A.P.; Traganos, D.; Lagomasino, D.; Poursanidis, D.; Moreno, S.; Fatoyinbo, L. Space-borne cloud-native satellite-derived Bathymetry (SDB) models using ICESat-2 and sentinel-2. Geophys. Res. Lett. 2021, 48, e2020GL092170. [Google Scholar] [CrossRef]
- Niroumand-Jadidi, M.; Bovolo, F.; Bruzzone, L. SMART-SDB: Sample-specific multiple band ratio technique for satellite-derived bathymetry. Remote Sens. Environ. 2020, 251, 112091. [Google Scholar] [CrossRef]
- Lu, X.; Hu, Y.; Omar, A.; Yang, Y.; Vaughan, M.; Rodier, S.; Garnier, A.; Ryan, R.; Getzewich, B.; Trepte, C. Nearshore bathymetry and seafloor property studies from Space lidars: CALIPSO and ICESat-2. Opt. Express 2022, 30, 36509–36525. [Google Scholar] [CrossRef]
- Nguyen, V.-A.; Ren, H.; Huang, C.-Y.; Tseng, K.-H. Bathymetry derivation in shallow water of the South China Sea with ICESat-2 and Sentinel-2 data. J. Appl. Remote Sens. 2021, 15, 044513. [Google Scholar] [CrossRef]
- Chen, H.; Chu, S.; Zhuang, Q.; Duan, Z.; Cheng, J.; Li, J.; Ye, L.; Yu, J.; Cheng, L. FSPN: End-to-end full-space pooling weakly supervised network for benthic habitat mapping using remote sensing images. Int. J. Appl. Earth Obs. Geoinf. 2023, 118, 103264. [Google Scholar] [CrossRef]
- Li, S.; Wang, X.H.; Ma, Y.; Yang, F. Satellite-Derived Bathymetry with Sediment Classification Using ICESat-2 and Multispectral Imagery: Case Studies in the South China Sea and Australia. Remote Sens. 2023, 15, 1026. [Google Scholar] [CrossRef]
- Cao, B.; Fang, Y.; Gao, L.; Hu, H.; Jiang, Z.; Sun, B.; Lou, L. An active-passive fusion strategy and accuracy evaluation for shallow water bathymetry based on ICESat-2 ATLAS laser point cloud and satellite remote sensing imagery. Int. J. Remote Sens. 2021, 42, 2783–2806. [Google Scholar] [CrossRef]
- Duan, Z.; Chu, S.; Cheng, L.; Ji, C.; Li, M.; Shen, W. Satellite-derived bathymetry using Landsat-8 and Sentinel-2A images: Assessment of atmospheric correction algorithms and depth derivation models in shallow waters. Opt. Express 2022, 30, 3238–3261. [Google Scholar] [CrossRef]
- Zhou, W.; Tang, Y.; Jing, W.; Li, Y.; Yang, J.; Deng, Y.; Zhang, Y. A Comparison of Machine Learning and Empirical Approaches for Deriving Bathymetry from Multispectral Imagery. Remote Sens. 2023, 15, 393. [Google Scholar] [CrossRef]
- Zhong, J.; Sun, J.; Lai, Z.; Song, Y. Nearshore Bathymetry from ICESat-2 LiDAR and Sentinel-2 Imagery Datasets Using Deep Learning Approach. Remote Sens. 2022, 14, 4229. [Google Scholar] [CrossRef]
- Huang, W.; Zhao, J.; Ai, B.; Sun, S.; Yan, N. Bathymetry and Benthic Habitat Mapping in Shallow Waters From Sentinel-2A Imagery: A Case Study in Xisha Islands, China. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–12. [Google Scholar] [CrossRef]
- Nguyen, T.; Liquet, B.; Mengersen, K.; Sous, D. Mapping of coral reefs with multispectral satellites: A review of recent papers. Remote Sens. 2021, 13, 4470. [Google Scholar] [CrossRef]
- Leng, Z.; Zhang, J.; Ma, Y.; Zhang, J. ICESat-2 Bathymetric Signal Reconstruction Method Based on a Deep Learning Model with Active–Passive Data Fusion. Remote Sens. 2023, 15, 460. [Google Scholar] [CrossRef]
- Wang, B.; Ma, Y.; Zhang, J.; Zhang, H.; Zhu, H.; Leng, Z.; Zhang, X.; Cui, A. A noise removal algorithm based on adaptive elevation difference thresholding for ICESat-2 photon-counting data. Int. J. Appl. Earth Obs. Geoinf. 2023, 117, 103207. [Google Scholar] [CrossRef]
- Li, N.; Tang, Q.; Chen, Y.; Dong, Z.; Li, J.; Fu, X. Satellite-derived bathymetry integrating spatial and spectral information of multispectral images. Appl. Opt. 2023, 62, 2017–2029. [Google Scholar] [CrossRef]
- Zhang, X.; Chen, Y.; Le, Y.; Zhang, D.; Yan, Q.; Dong, Y.; Han, W.; Wang, L. Nearshore bathymetry based on ICESat-2 and multispectral images: Comparison between sentinel-2, landsat-8, and testing Gaofen-2. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2022, 15, 2449–2462. [Google Scholar] [CrossRef]
- Peng, K.; Xie, H.; Xu, Q.; Huang, P.; Liu, Z. A Physics-Assisted Convolutional Neural Network for Bathymetric Mapping Using ICESat-2 and Sentinel-2 Data. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–13. [Google Scholar] [CrossRef]
- Susa, T. Satellite derived bathymetry with Sentinel-2 imagery: Comparing traditional techniques with advanced methods and machine learning ensemble models. Mar. Geod. 2022, 45, 435–461. [Google Scholar] [CrossRef]
- Lee, Z.; Shangguan, M.; Garcia, R.A.; Lai, W.; Lu, X.; Wang, J.; Yan, X. Confidence measure of the shallow-water bathymetry map obtained through the fusion of Lidar and multiband image data. J. Remote Sens. 2021, 2021. [Google Scholar] [CrossRef]
- Lyzenga, D.R. Passive remote sensing techniques for mapping water depth and bottom features. Appl. Opt. 1978, 17, 379–383. [Google Scholar] [CrossRef] [PubMed]
- Stumpf, R.P.; Holderied, K.; Sinclair, M. Determination of water depth with high-resolution satellite imagery over variable bottom types. Limnol. Oceanogr. 2003, 48, 547–556. [Google Scholar] [CrossRef]
- Xu, N.; Ma, X.; Ma, Y.; Zhao, P.; Yang, J.; Wang, X.H. Deriving highly accurate shallow water bathymetry from Sentinel-2 and ICESat-2 datasets by a multitemporal stacking method. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 6677–6685. [Google Scholar] [CrossRef]
- Yang, H.; Guo, H.; Dai, W.; Nie, B.; Qiao, B.; Zhu, L. Bathymetric mapping and estimation of water storage in a shallow lake using a remote sensing inversion method based on machine learning. Int. J. Digit. Earth 2022, 15, 789–812. [Google Scholar] [CrossRef]
- Pertiwi, A.; Carpenter, S.; Thomas, N.; Lee, C.B.; Traganos, D. Evaluating Multilinear and Machine Learning Regression Methods for Satellite-derived Bathymetry Mapping Using ICESat-2 and Sentinel-2 Data on Google Earth Engine. In Proceedings of the AGU Fall Meeting Abstracts, New Orleans, LA, USA, 13–17 December 2021; p. G54A–03. [Google Scholar]
- Chu, S.; Cheng, L.; Cheng, J.; Zhang, X.; Zhang, J.; Chen, J.; Liu, J. Shallow water bathymetry based on a back propagation neural network and ensemble learning using multispectral satellite imagery. Acta Oceanol. Sin. 2023, 42, 154–165. [Google Scholar] [CrossRef]
- Guo, X.; Jin, X.; Jin, S. Shallow Water Bathymetry Mapping from ICESat-2 and Sentinel-2 Based on BP Neural Network Model. Water 2022, 14, 3862. [Google Scholar] [CrossRef]
- Xie, C.; Chen, P.; Zhang, Z.; Pan, D. Satellite-derived bathymetry combined with Sentinel-2 and ICESat-2 datasets using machine learning. Front. Earth Sci. 2023, 11, 453. [Google Scholar] [CrossRef]
- Xie, T.; Kong, R.; Nurunnabi, A.; Bai, S.; Zhang, X. Machine Learning Method-based Inversion of Shallow Bathymetric Maps Using ICESat-2 ATL03 Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2023, 16, 3697–3714. [Google Scholar] [CrossRef]
- Kibele, J.; Shears, N.T. Nonparametric empirical depth regression for bathymetric mapping in coastal waters. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 5130–5138. [Google Scholar] [CrossRef]
- Drusch, M.; Del Bello, U.; Carlier, S.; Colin, O.; Fernandez, V.; Gascon, F.; Hoersch, B.; Isola, C.; Laberinti, P.; Martimort, P. Sentinel-2: ESA’s optical high-resolution mission for GMES operational services. Remote Sens. Environ. 2012, 120, 25–36. [Google Scholar] [CrossRef]
- Phiri, D.; Simwanda, M.; Salekin, S.; Nyirenda, V.R.; Murayama, Y.; Ranagalage, M. Sentinel-2 data for land cover/use mapping: A review. Remote Sens. 2020, 12, 2291. [Google Scholar] [CrossRef]
- European Space Agency (ESA). User Handbook; ESA Standard Document; ESA: Paris, France, 2015; Volume 64, p. 64. [Google Scholar]
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-scale geospatial analysis for everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Markus, T.; Neumann, T.; Martino, A.; Abdalati, W.; Brunt, K.; Csatho, B.; Farrell, S.; Fricker, H.; Gardner, A.; Harding, D. The Ice, Cloud, and land Elevation Satellite-2 (ICESat-2): Science requirements, concept, and implementation. Remote Sens. Environ. 2017, 190, 260–273. [Google Scholar] [CrossRef]
- Popescu, S.; Zhou, T.; Nelson, R.; Neuenschwander, A.; Sheridan, R.; Narine, L.; Walsh, K. Photon counting LiDAR: An adaptive ground and canopy height retrieval algorithm for ICESat-2 data. Remote Sens. Environ. 2018, 208, 154–170. [Google Scholar] [CrossRef]
- Abdalati, W.; Zwally, H.J.; Bindschadler, R.; Csatho, B.; Farrell, S.L.; Fricker, H.A.; Harding, D.; Kwok, R.; Lefsky, M.; Markus, T. The ICESat-2 laser altimetry mission. Proc. IEEE 2010, 98, 735–751. [Google Scholar] [CrossRef]
- Smith, B.; Fricker, H.A.; Holschuh, N.; Gardner, A.S.; Adusumilli, S.; Brunt, K.M.; Csatho, B.; Harbeck, K.; Huth, A.; Neumann, T. Land ice height-retrieval algorithm for NASA's ICESat-2 photon-counting laser altimeter. Remote Sens. Environ. 2019, 233, 111352. [Google Scholar] [CrossRef]
- Neumann, T.; Brenner, A.; Hancock, D.; Robbins, J.; Saba, J.; Harbeck, K.; Gibbons, A.; Lee, J.; Luthcke, S.; Rebold, T. ATLAS/ICESat-2 L2A Global Geolocated Photon Data, Version 5; NASA National Snow and Ice Data Center Distributed Active Archive Center: Boulder, CO, USA, 2021. [Google Scholar]
- Chu, S.; Cheng, L.; Ruan, X.; Zhuang, Q.; Zhou, X.; Li, M.; Shi, Y. Technical framework for shallow-water bathymetry with high reliability and no missing data based on time-series sentinel-2 images. IEEE Trans. Geosci. Remote Sens. 2019, 57, 8745–8763. [Google Scholar] [CrossRef]
- Li, J.; Knapp, D.E.; Schill, S.R.; Roelfsema, C.; Phinn, S.; Silman, M.; Mascaro, J.; Asner, G.P. Adaptive bathymetry estimation for shallow coastal waters using Planet Dove satellites. Remote Sens. Environ. 2019, 232, 111302. [Google Scholar] [CrossRef]
- Ma, Y.; Xu, N.; Liu, Z.; Yang, B.; Yang, F.; Wang, X.H.; Li, S. Satellite-derived bathymetry using the ICESat-2 lidar and Sentinel-2 imagery datasets. Remote Sens. Environ. 2020, 250, 112047. [Google Scholar] [CrossRef]
- Li, J.; Knapp, D.E.; Lyons, M.; Roelfsema, C.; Phinn, S.; Schill, S.R.; Asner, G.P. Automated global shallow water bathymetry mapping using Google Earth Engine. Remote Sens. 2021, 13, 1469. [Google Scholar] [CrossRef]
- Ashphaq, M.; Srivastava, P.K.; Mitra, D. Review of near-shore satellite derived bathymetry: Classification and account of five decades of coastal bathymetry research. J. Ocean Eng. Sci. 2021, 6, 340–359. [Google Scholar] [CrossRef]
- Malambo, L.; Popescu, S. Photonlabeler: An inter-disciplinary platform for visual interpretation and labeling of icesat-2 geolocated photon data. Remote Sens. 2020, 12, 3168. [Google Scholar] [CrossRef]
- Parrish, C.E.; Magruder, L.A.; Neuenschwander, A.L.; Forfinski-Sarkozi, N.; Alonzo, M.; Jasinski, M. Validation of ICESat-2 ATLAS bathymetry and analysis of ATLAS’s bathymetric mapping performance. Remote Sens. 2019, 11, 1634. [Google Scholar] [CrossRef]
- Ranndal, H.; Sigaard Christiansen, P.; Kliving, P.; Baltazar Andersen, O.; Nielsen, K. Evaluation of a statistical approach for extracting shallow water bathymetry signals from ICESat-2 ATL03 photon data. Remote Sens. 2021, 13, 3548. [Google Scholar] [CrossRef]
- Thomas, N.; Lee, B.; Coutts, O.; Bunting, P.; Lagomasino, D.; Fatoyinbo, L. A purely spaceborne open source approach for regional bathymetry mapping. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–9. [Google Scholar] [CrossRef]
- Gardner, M.W.; Dorling, S. Artificial neural networks (the multilayer perceptron)—A review of applications in the atmospheric sciences. Atmos. Environ. 1998, 32, 2627–2636. [Google Scholar] [CrossRef]
- Liu, S.; Gao, Y.; Zheng, W.; Li, X. Performance of two neural network models in bathymetry. Remote Sens. Lett. 2015, 6, 321–330. [Google Scholar] [CrossRef]
- Alevizos, E. A combined machine learning and residual analysis approach for improved retrieval of shallow bathymetry from hyperspectral imagery and sparse ground truth data. Remote Sens. 2020, 12, 3489. [Google Scholar] [CrossRef]
- Surisetty, V.A.K.; Venkateswarlu, C.; Gireesh, B.; Prasad, K.; Sharma, R. On improved nearshore bathymetry estimates from satellites using ensemble and machine learning approaches. Adv. Space Res. 2021, 68, 3342–3364. [Google Scholar] [CrossRef]
- Ashphaq, M.; Srivastava, P.K.; Mitra, D. Preliminary examination of influence of Chlorophyll, Total Suspended Material, and Turbidity on Satellite Derived-Bathymetry estimation in coastal turbid water. Reg. Stud. Mar. Sci. 2023, 62, 102920. [Google Scholar] [CrossRef]
- Mudiyanselage, S.; Abd-Elrahman, A.; Wilkinson, B.; Lecours, V. Satellite-derived bathymetry using machine learning and optimal Sentinel-2 imagery in South-West Florida coastal waters. Gisci. Remote Sens. 2022, 59, 1143–1158. [Google Scholar] [CrossRef]
- Biau, G.; Scornet, E. A random forest guided tour. Test 2016, 25, 197–227. [Google Scholar] [CrossRef]
- Fan, C.; Song, C.; Liu, K.; Ke, L.; Xue, B.; Chen, T.; Fu, C.; Cheng, J. Century-scale reconstruction of water storage changes of the largest lake in the inner mongolia plateau using a machine learning approach. Water Resour. Res. 2021, 57, e2020WR028831. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, J.; Shen, W. A review of ensemble learning algorithms used in remote sensing applications. Appl. Sci. 2022, 12, 8654. [Google Scholar] [CrossRef]
- Huber, S.; Hansen, L.B.; Nielsen, L.T.; Rasmussen, M.L.; Sølvsteen, J.; Berglund, J.; Paz von Friesen, C.; Danbolt, M.; Envall, M.; Infantes, E. Novel approach to large-scale monitoring of submerged aquatic vegetation: A nationwide example from Sweden. Integr. Environ. Assess. Manag. 2022, 18, 909–920. [Google Scholar] [CrossRef] [PubMed]
- Dong, L.; Qi, J.; Yin, B.; Zhi, H.; Li, D.; Yang, S.; Wang, W.; Cai, H.; Xie, B. Reconstruction of Subsurface Salinity Structure in the South China Sea Using Satellite Observations: A LightGBM-Based Deep Forest Method. Remote Sens. 2022, 14, 3494. [Google Scholar] [CrossRef]
- Ke, G.; Meng, Q.; Finley, T.; Wang, T.; Chen, W.; Ma, W.; Ye, Q.; Liu, T.-Y. Lightgbm: A highly efficient gradient boosting decision tree. Adv. Neural Inf. Process. Syst. 2017, 30, 3149–3157. [Google Scholar]
- Liu, Y.; Zhao, J.; Deng, R.; Liang, Y.; Gao, Y.; Chen, Q.; Xiong, L.; Liu, Y.; Tang, Y.; Tang, D. A downscaled bathymetric mapping approach combining multitemporal Landsat-8 and high spatial resolution imagery: Demonstrations from clear to turbid waters. ISPRS J. Photogramm. Remote Sens. 2021, 180, 65–81. [Google Scholar] [CrossRef]
- Chu, S.; Cheng, L.; Cheng, J.; Zhang, X.; Liu, J. Comparison of six empirical methods for multispectral satellite-derived bathymetry. Mar. Geod. 2023, 46, 149–174. [Google Scholar] [CrossRef]
- Hsu, H.-J.; Huang, C.-Y.; Jasinski, M.; Li, Y.; Gao, H.; Yamanokuchi, T.; Wang, C.-G.; Chang, T.-M.; Ren, H.; Kuo, C.-Y. A semi-empirical scheme for bathymetric mapping in shallow water by ICESat-2 and Sentinel-2: A case study in the South China Sea. ISPRS J. Photogramm. Remote Sens. 2021, 178, 1–19. [Google Scholar] [CrossRef]
- Akbari Asanjan, A.; Das, K.; Li, A.; Chirayath, V.; Torres-Perez, J.; Sorooshian, S. Learning instrument invariant characteristics for generating high-resolution global coral reef maps. In Proceedings of the 26th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining, Virtual, CA, USA, 6–10 July 2020; pp. 2617–2624. [Google Scholar]
- Gonzalez-Rivero, M.; Beijbom, O.; Rodriguez-Ramirez, A.; Bryant, D.E.; Ganase, A.; Gonzalez-Marrero, Y.; Herrera-Reveles, A.; Kennedy, E.V.; Kim, C.J.; Lopez-Marcano, S. Monitoring of coral reefs using artificial intelligence: A feasible and cost-effective approach. Remote Sens. 2020, 12, 489. [Google Scholar] [CrossRef]
- Modasshir, M.; Rekleitis, I. Enhancing coral reef monitoring utilizing a deep semi-supervised learning approach. In Proceedings of the International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 1874–1880. [Google Scholar]
- Yu, X.; Ma, Y.; Farrington, S.; Reed, J.; Ouyang, B.; Principe, J.C. Fast segmentation for large and sparsely labeled coral images. In Proceedings of the International Joint Conference on Neural Networks (IJCNN), Budapest, Hungary, 14–19 July 2019; pp. 1–6. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Models | Optimal Hyperparameters |
|---|---|
| MLP | hidden_layer_sizes = (20, 15), activation = tanh, solver = lbfgs, alpha = 0.0001, max_iter = 100,000 |
| KNN | n_estimators = 5, p = 1, algorithm = brute, weights = uniform. |
| SVM | kernel = rbf, gamma = 1000, penalty parameters C = 100 |
| RF | n_estimators = 600, max_depth = 14, min_samples_leaf = 1, min_samples_split = 2, bootstrap = True |
| XGBoost | n_estimators = 600, max_depth = 6, gamma = 0.1, subsample = 0.6 |
| LGBM | n_estimators = 400, max_depth = 3, num_leaves = 8, boosting_type = gbdt, feature_ fraction = 0.9 |
| Models | Accuracy Indicator | Water Depth (m) (the Number of Validation Points) | |||
|---|---|---|---|---|---|
| 0–5 (226) | 5–10 (488) | 10–15 (400) | 15–20 (157) | ||
| Lyzenga | MAE (m) | 0.697 | 0.723 | 0.665 | 3.042 |
| RMSE (m) | 0.852 | 0.958 | 0.885 | 3.233 | |
| Stumpf | MAE (m) | 0.561 | 0.854 | 0.835 | 2.440 |
| RMSE (m) | 0.727 | 1.131 | 1.112 | 2.623 | |
| LGBM | MAE (m) | 0.452 | 0.859 | 0.779 | 1.603 |
| RMSE (m) | 0.809 | 1.136 | 1.009 | 2.038 | |
| XGBoost | MAE (m) | 0.444 | 0.888 | 0.736 | 1.496 |
| RMSE (m) | 0.759 | 1.151 | 0.971 | 1.910 | |
| RF | MAE (m) | 0.442 | 0.869 | 0.784 | 1.421 |
| RMSE (m) | 0.792 | 1.151 | 1.105 | 1.808 | |
| SVM | MAE (m) | 0.382 | 0.928 | 0.677 | 1.532 |
| RMSE (m) | 0.633 | 1.194 | 0.878 | 1.969 | |
| KNN | MAE (m) | 0.454 | 0.868 | 0.734 | 1.164 |
| RMSE (m) | 0.696 | 1.135 | 0.996 | 1.430 | |
| MLP | MAE (m) | 0.391 | 0.905 | 0.712 | 1.137 |
| RMSE (m) | 0.605 | 1.151 | 0.917 | 1.367 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, J.; Cheng, L.; Chu, S.; Li, J.; Hu, Q.; Ye, L.; Wang, Z.; Chen, H. A Comprehensive Evaluation of Machine Learning and Classical Approaches for Spaceborne Active-Passive Fusion Bathymetry of Coral Reefs. ISPRS Int. J. Geo-Inf. 2023, 12, 381. https://doi.org/10.3390/ijgi12090381
Cheng J, Cheng L, Chu S, Li J, Hu Q, Ye L, Wang Z, Chen H. A Comprehensive Evaluation of Machine Learning and Classical Approaches for Spaceborne Active-Passive Fusion Bathymetry of Coral Reefs. ISPRS International Journal of Geo-Information. 2023; 12(9):381. https://doi.org/10.3390/ijgi12090381
Chicago/Turabian StyleCheng, Jian, Liang Cheng, Sensen Chu, Jizhe Li, Qixin Hu, Li Ye, Zhiyong Wang, and Hui Chen. 2023. "A Comprehensive Evaluation of Machine Learning and Classical Approaches for Spaceborne Active-Passive Fusion Bathymetry of Coral Reefs" ISPRS International Journal of Geo-Information 12, no. 9: 381. https://doi.org/10.3390/ijgi12090381