

Near Real-Time Detection and Moment Tensor Inversion of the 11 May 2022, Dharchula Earthquake
 , ,
, ,
Abstract
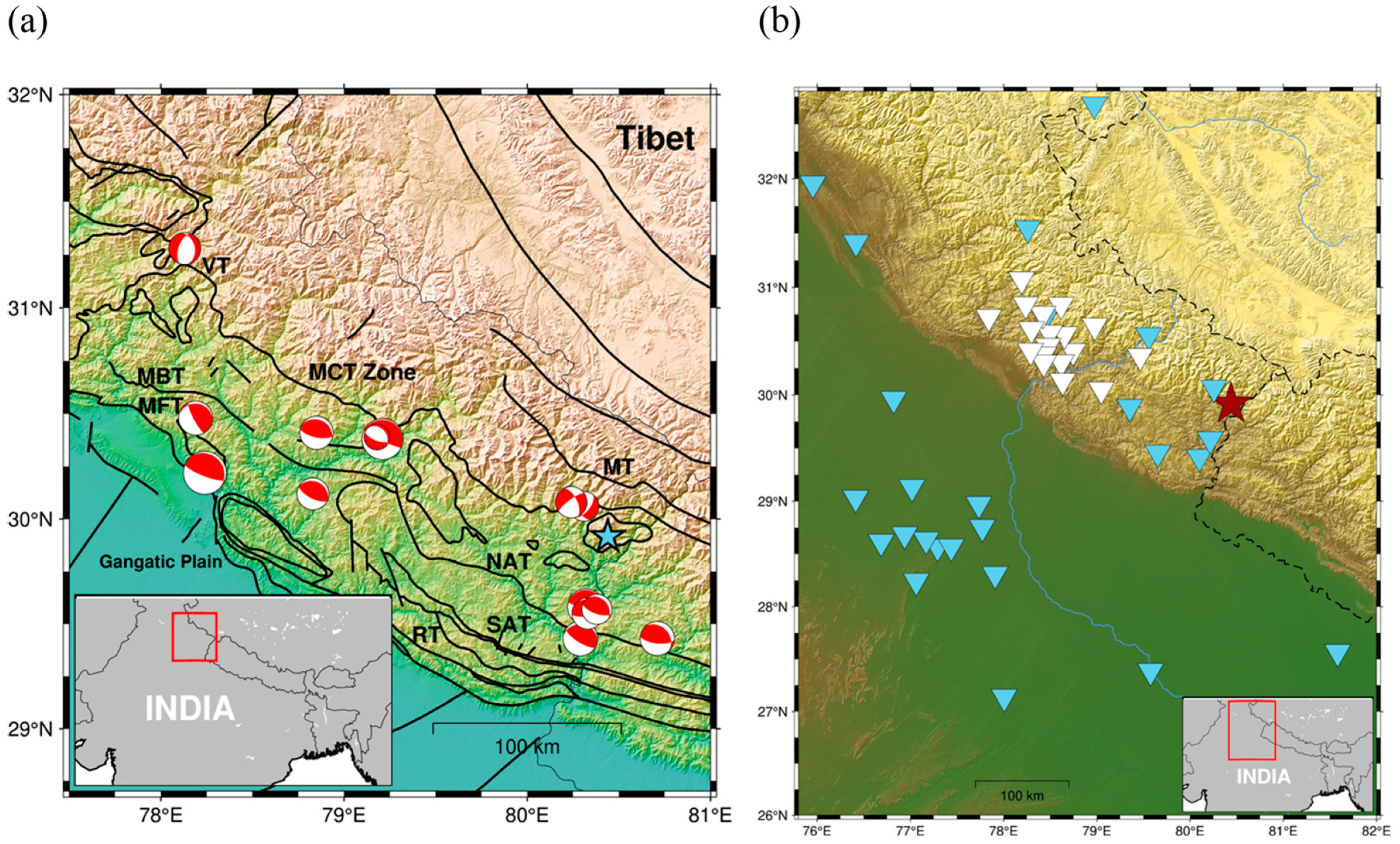
:1. Introduction

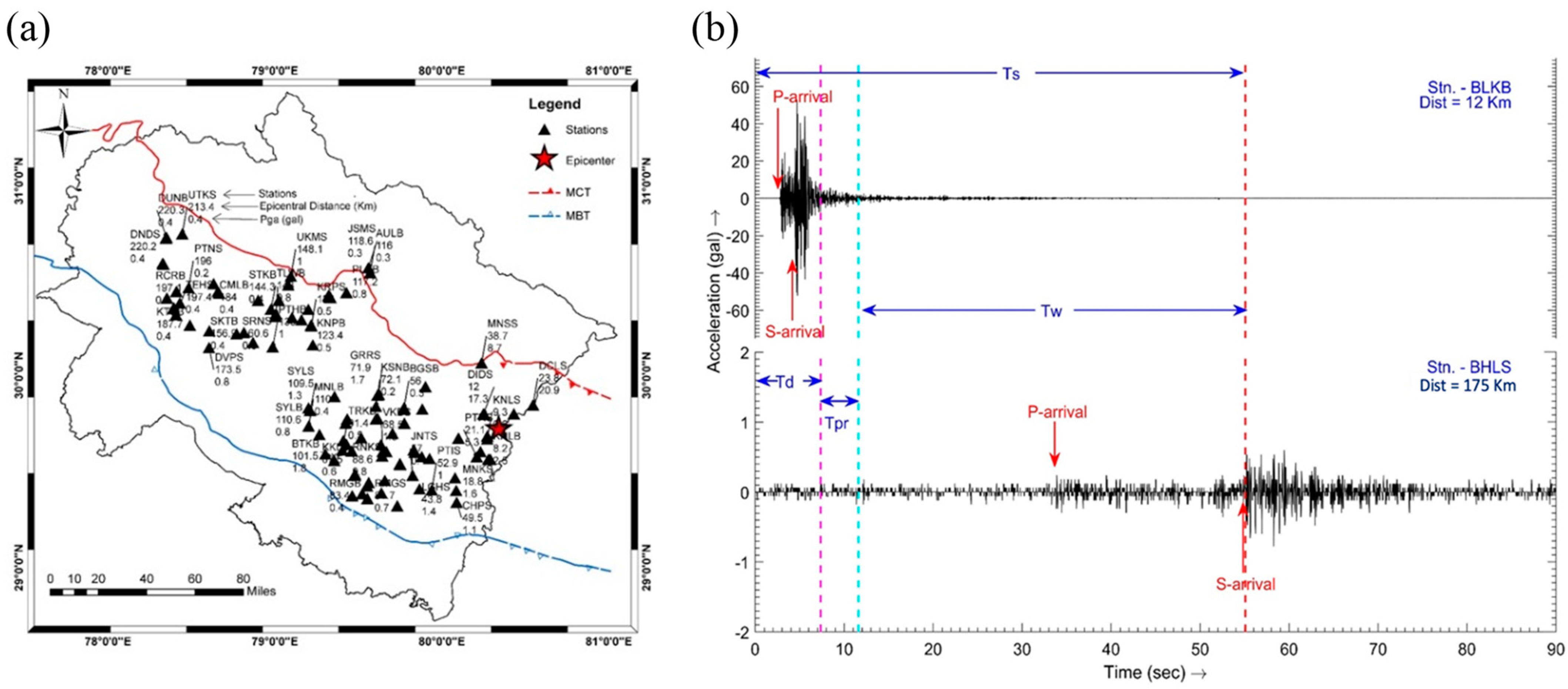
2. Uttarakhand State Earthquake Early Warning System
2.1. Case Study: Dharchula Earthquake, 11 May 2022
2.2. Phase Detection and Location Inversion
3. Moment Tensor Inversion
4. Data and Method
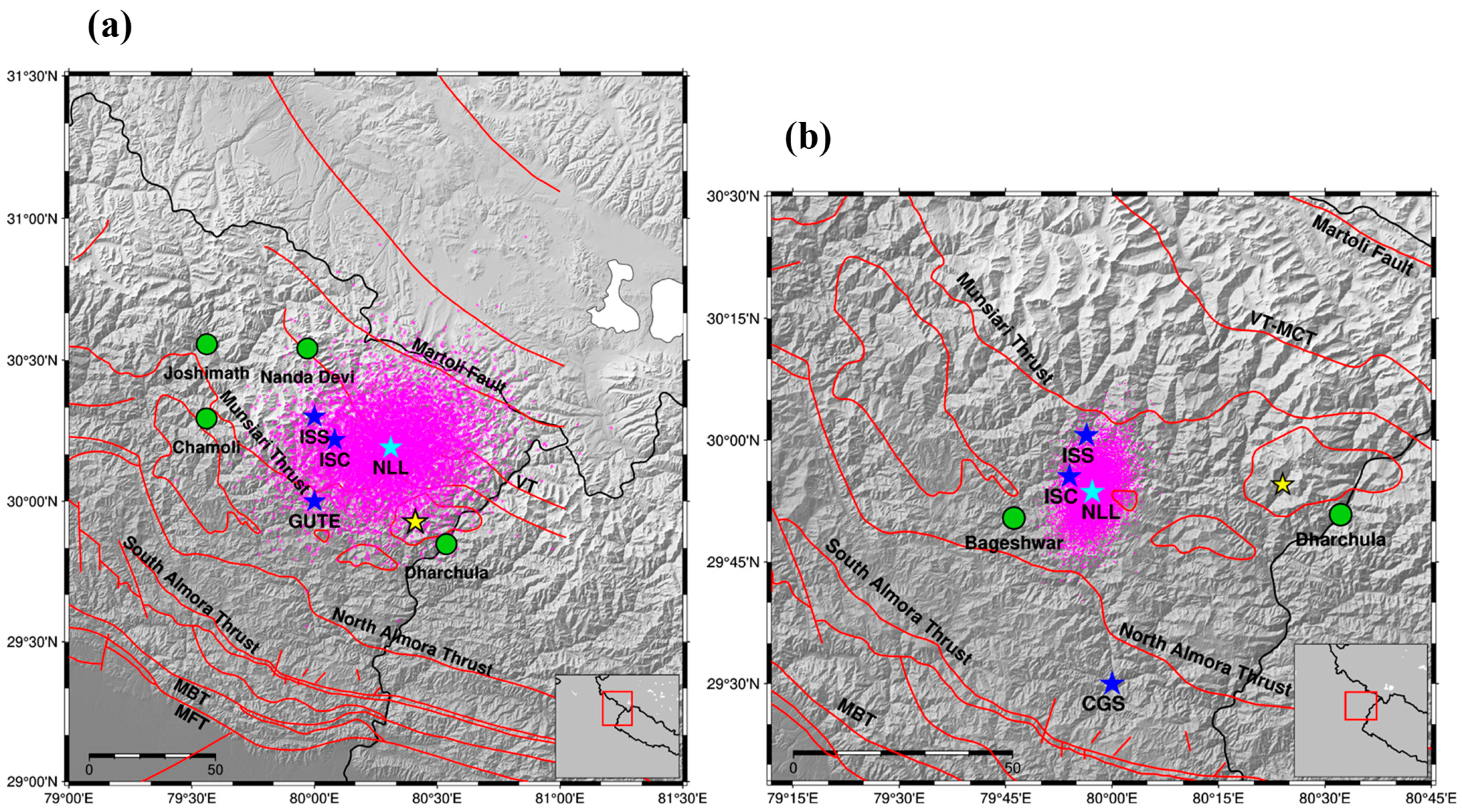
Relocation of Historical Events
5. Results and Conclusions
- The event was also recorded at 89 MEMS sensors and was detected within 11.61 s of the origin, taking only 4.26 s for processing, location and magnitude estimation, and warning dissemination. The quick estimation of magnitude using the amplitude data resulted in MPd 4.6; however, the moment tensor inversion resulted in Mw 5.2.
- The moment tensor inversion of the 11 May 2022 Dharchula earthquake using body and surface waves was performed. The moment tensor inversion solution was obtained using 30 broadband stations from both THDCIL (local) and NCS (regional) networks. The results revealed a thrust faulting rupture near the Chiplakot klippe. Additionally, the depth test in Figure 3c depicted that the depth corresponding to the minimum misfit was determined to be 2 km.
- We performed the relocation of two major historical events that occurred in the vicinity of the Dharchula event. The relocation resulted in the maximum likelihood locations of Mw 6.5, the 1945 Nanda Devi event, and Mw 6.3, the 1958 Kapkote event, which occurred at a depth around 20 km along the mid-crustal Himalayan.
6. Data and Resources
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Patriat, P.; Achache, J. India-Eurasia collision chronology has implications for crustal shortening and driving mechanism of plates. Nature 1984, 311, 615–621. [Google Scholar] [CrossRef]
- Molnar, P.; Topponnier, P. Cenozoic Tectonics of Asia: Effects of a Continental Collision. Science 1975, 189, 419–426. [Google Scholar] [CrossRef]
- Bilham, R. Earthquakes in India and the Himalaya: Tectonics, geodesy and history. Ann. Geophys. 2004, 47, 839–858. [Google Scholar] [CrossRef]
- Srivastava, H.N.; Verma, M.; Bansal, B.K.; Sutar, A.K. Discriminatory characteristics of seismic gaps in Himalaya. Geomat. Nat. Hazards Risk 2015, 6, 224–242. [Google Scholar] [CrossRef]
- Kayal, J.R. Microearthquake activity in some parts of the Himalaya and the tectonic model. Tectonophysics 2001, 339, 331–351. [Google Scholar] [CrossRef]
- Gautam, D. Unearthed lessons of 25 April 2015 Gorkha earthquake (MW 7.8): Geotechnical earthquake engineering perspectives. Geomat. Nat. Hazards Risk 2017, 8, 1358–1382. [Google Scholar] [CrossRef]
- Wyss, M. Second Round of Evaluations of Proposed Earthquake Precursors. Pure Appl. Geophys. 1997, 149, 3–16. [Google Scholar] [CrossRef]
- Chamoli, B.P.; Kumar, A.; Chen, D.Y.; Gairola, A.; Jakka, R.S.; Pandey, B.; Kumar, P.; Rathore, G. A Prototype Earthquake Early Warning System for Northern India. J. Earthq. Eng. 2021, 25, 2455–2473. [Google Scholar] [CrossRef]
- Ekström, G.; Nettles, M.; Dziewoński, A.M. The global CMT project 2004–2010: Centroid-moment tensors for 13,017 earthquakes. Phys. Earth Planet. Inter. 2012, 200–201, 1–9. [Google Scholar] [CrossRef]
- DasGupt, S.; Pandey, P.; Ganguly, D.; Iqbal, Z. Seismotectonic Atlas of India and Its Environs; Geological Survey of India: Kolkata, India, 2000. [Google Scholar]
- Valdiya, K.S. Uplift and geomorphic rejuvenation of the Himalaya in the Quaternary period. Curr. Sci. 1993, 64, 873–885. [Google Scholar]
- Paul, A.; Gupta, S.C.; Pant, C.C. CODA Q estimates for Kumaun Himalaya. Proc. Indian Acad. Sci. Earth Planet. Sci. 2003, 112, 569–576. [Google Scholar] [CrossRef]
- Valdiya, K.S. Evolution of the Himalaya. In Lithosphere: Structure, Dynamics and Evolution; Naqvi, S.M., Gupta, H.K., Balakrishna, S., Eds.; Elsevier: Amsterdam, The Netherlands, 1984; Volume 105, pp. 229–248. [Google Scholar]
- Kumar, P.; Kamal; Sharma, M.L.; Pratibha; Jakka, R.S.; Kumar, A.; Joshi, G.C.; Rautela, P. Successful Alert Issuance with Sufficient Lead Time by Uttarakhand State Earthquake Early Warning System: Case Study of Nepal Earthquakes. J. Geol. Soc. India 2023, 99, 303–310. [Google Scholar] [CrossRef]
- Chen, D.Y.; Hsiao, N.C.; Wu, Y.M. The earthworm based earthquake alarm reporting system in Taiwan. Bull. Seismol. Soc. Am. 2015, 105, 568–579. [Google Scholar] [CrossRef]
- Allen, R.V. Automatic Earthqauke Recognition and Timing From Single Traces. Bull. Seismol. Soc. Am. 1978, 68, 1521–1532. [Google Scholar] [CrossRef]
- Allen, R. Automatic phase pickers: Their present use and future prospects. Bull. Seismol. Soc. Am. 1982, 72, S225–S242. [Google Scholar] [CrossRef]
- Kanaujia, J.; Kumar, A.; Gupta, S.C. 1D velocity structure and characteristics of contemporary local seismicity around the Tehri region, Garhwal Himalaya. Bull. Seismol. Soc. Am. 2015, 105, 1852–1869. [Google Scholar] [CrossRef]
- Geiger, L. Probability method for the determination of earthquake epicenters from the arrival times only. Bull. Saint Louis Univ. 1912, 8, 60–71. [Google Scholar]
- Isacks, B.; Oliver, J.; Sykes, L.R. Seismology and New Global Tectonics. J. Geophys. Res. 1968, 73, 5855–5899. [Google Scholar] [CrossRef]
- Eyre, T.S.; Van Der Baan, M. Overview of moment-tensor inversion of microseismic events. Lead. Edge 2015, 34, 882–888. [Google Scholar] [CrossRef]
- da Silva, S.L.E.F.; Julià, J.; Bezerra, F.H.R. Deviatoric moment tensor solutions from spectral amplitudes in surface network recordings: Case study in São aetano, Pernambuco, Brazil. Bull. Seismol. Soc. Am. 2017, 107, 1495–1511. [Google Scholar] [CrossRef]
- Zhu, L.; Helmberger, D.V. Advancement in source estimation techniques using broadband regional seismograms. Bull. Seismol. Soc. Am. 1996, 86, 1634–1641. [Google Scholar] [CrossRef]
- Dreger, D.; Uhrhammer, R.; Pasyanos, M.; Franck, J.; Romanowicz, B. Regional and far-regional earthquake locations and source parameters using sparse broadband networks: A test on the Ridgecrest sequence. Bull. Seismol. Soc. Am. 1998, 88, 1353–1362. [Google Scholar] [CrossRef]
- Silwal, V.; Tape, C. Seismic moment tensors and estimated uncertainties in southern Alaska. J. Geophys. Res. Solid Earth 2016, 121, 2772–2797. [Google Scholar] [CrossRef]
- Beyreuther, M.; Barsch, R.; Krischer, L.; Megies, T.; Behr, Y.; Wassermann, J. ObsPy: A python toolbox for seismology. Seismol. Res. Lett. 2010, 81, 530–533. [Google Scholar] [CrossRef]
- Zhu, L.; Rivera, L.A. A note on the dynamic and static displacements from a point source in multilayered media. Geophys. J. Int. 2002, 148, 619–627. [Google Scholar] [CrossRef]
- Mahesh, P.; Rai, S.S.; Sivaram, K.; Paul, A.; Gupta, S.; Sarma, R.; Gaur, V.K. One-dimensional reference velocity model and precise locations of earthquake hypocenters in the Kumaon-Garhwal Himalaya. Bull. Seismol. Soc. Am. 2013, 103, 328–339. [Google Scholar] [CrossRef]
- Silwal, V.; Tape, C.; Lomax, A. Crustal earthquakes in the Cook Inlet and Susitna region of southern Alaska. Tectonophysics 2018, 745, 245–263. [Google Scholar] [CrossRef]
- Tape, W.; Tape, C. A geometric setting for moment tensors. Geophys. J. Int. 2012, 190, 476–498. [Google Scholar] [CrossRef]
- Lomax, A.; Virieux, J.; Volant, P.; Berge-Thierry, C. Probabilistic earthquake location in 3D and layered models. In Advances in Seismic Event Location; Thurber, C.H., Rabinowitz, N., Eds.; Springer-Science+Business Media, B.V.: Berlin, Germany, 2000; ISBN 978-94-015-9536-0. [Google Scholar]
- Kennett, B.L.N.; Engdahl, E.R.; Buland, R. Constraints on seismic velocities in the Earth from traveltimes. Geophys. J. Int. 1995, 122, 108–124. [Google Scholar] [CrossRef]
- Crotwell, H.P.; Owens, T.J.; Ritsema, J. The TauP Tookit: Flexible Seismic Travel-time and Ray-path Utilities. Seismol. Res. Lett. 1999, 70, 154–160. [Google Scholar] [CrossRef]
- Gutenberg, B.; Richter, C.F. Seismicity of the Earth and Associated Phenomena; Princeton University Press: Princeton, NJ, USA, 1958. [Google Scholar]
- Jai, K.; Mittal, R.S.; Chandrasekaran, A.R.; Manglik, S.K. Kapkote Earthquake of Dec. 28, 1958; University of Roorkee: Roorkee, India, 1958. [Google Scholar]
- Khattri, K.N. Great Earthquakes, Seismicity Gaps and Potential for Earthquake Disaster along the Himalaya Plate Boundary. Tectonophysics 1987, 138, 79–92. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Inversion Parameters | UEEWS | USGS | CAP |
|---|---|---|---|
| origin time (UTC) | 2022-05-11 04:33:06.62 | 2022-05-11 04:33:11 | - |
| Magnitude | MPd 4.6 | Mb 4.9 | Mw 5.2 |
| Depth (km) | 10 | 33.1 | 2 |
| Latitude | 29.91 | 29.968 | - |
| Longitude | 80.38 | 80.422 | - |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kumar, P.; Silwal, V.; Mahanta, R.; Maurya, V.K.; Kamal; Sharma, M.L.; Ammani, A. Near Real-Time Detection and Moment Tensor Inversion of the 11 May 2022, Dharchula Earthquake. GeoHazards 2023, 4, 515-525. https://doi.org/10.3390/geohazards4040029
Kumar P, Silwal V, Mahanta R, Maurya VK, Kamal, Sharma ML, Ammani A. Near Real-Time Detection and Moment Tensor Inversion of the 11 May 2022, Dharchula Earthquake. GeoHazards. 2023; 4(4):515-525. https://doi.org/10.3390/geohazards4040029
Chicago/Turabian StyleKumar, Pankaj, Vipul Silwal, Rinku Mahanta, Vipin Kumar Maurya, Kamal, Mukat Lal Sharma, and Ambikapathy Ammani. 2023. "Near Real-Time Detection and Moment Tensor Inversion of the 11 May 2022, Dharchula Earthquake" GeoHazards 4, no. 4: 515-525. https://doi.org/10.3390/geohazards4040029