

An Overview of Energies Problems in Robotic Systems

1
Institute of Automation and Info-Communication, Faculty of Mechanical engineering and Infromatics, University of Miskolc, Egyetemváros, 3515 Miskolc, Hungary
2
Department of Computer Engineering, Technical College, Northern Technical University, Mosul 410002, Iraq
*
Author to whom correspondence should be addressed.
†
These authors contributed equally to this work.
Energies 2023, 16(24), 8060; https://doi.org/10.3390/en16248060
Submission received: 26 September 2023
/
Revised: 1 December 2023
/
Accepted: 7 December 2023
/
Published: 14 December 2023
(This article belongs to the Special Issue Energy Problems in Control and Robotics Systems)
Abstract
:Considering the current world trends, the most challenging issue industry is facing revolves around how to reduce the power consumption of electronic systems. Since the invention of computers, electrical energy consumption has increased dramatically; this is due to the emergence of new systems in industry. Systems like industrial robots and autonomous vehicles—including electric vehicles (EVs) and unmanned aerial vehicles (UAVs)—have had a great impact in making human life easier but have also led to higher energy consumption. At present, researchers and developers are actively seeking solutions and patents to optimize the energy consumption of the mentioned systems and generate savings, with the goal of reducing their environmental impact and improving their efficiency and effectiveness. From the literature review, papers related to energy optimization and energy consumption are considered vital, and a huge number of research publications and survey papers discuss it. This paper presents a systematic review of the classification and analysis of various methodologies and solutions that have been developed to enhance the energy performance of robotic systems, focusing on industrial robots, autonomous vehicles, and embedded systems. The aim of this research is to provide a reference point for the existing methods, techniques, and technologies that are available. It compares and evaluates different hardware and software methods related to industrial robots, autonomous vehicles, and embedded systems, highlighting the possible future perspectives in the field.
1. Introduction
The power consumption of electronic devices has always been one of the main problems in embedded system design, robotics, and vehicles. In the new “everything electrically powered” era, this is and will continue to be the main problem. The field of energy production and power consumption of electrical devices has become a controversial problem in light of the events of recent years (such as pandemics, war, energy crises, semiconductor industry crisis, etc.).
Humanity is facing the biggest challenge since the invention of the steam engine or maybe even earlier other technological inventions. Certainly, every crisis can lead to the invention of new technologies. Electrical power production will probably now focus on renewable energies, such as solar, wind, and hydro-power energy production. It is very difficult to have an overview of the robotics energy problems and of all the fields where robotics and process automation have and will come to solve the increasing energy demand. The energy problem in control and robotics may have many aspects. This paper is not intended to present a perfect survey about the “Energy Problems in Control and Robotics Systems” but is an attempt to summarize some of the methods introduced in the last five years.
In this paper, we try to give an overview of three main topics that we consider very important. The fields where reducing energy consumption is vital are as follows:
- Industrial robotic systems;
- Autonomous systems;
- Embedded systems.
This review article focuses on papers published between 2017 and 2023 identified in the databases of Google Scholar, Web of Science, IEEE Xplore, and Science Direct. The keywords used for the search are “energy problems”, “energy optimization”, and “energy performance” in each related section of this article. Table 1 shows the search results of different sites. From the table results, we can see that “energy problems” is a hot topic. We further selected among the identified papers those that we considered most relevant (and interesting). Some research findings in the literature may be limited to a theoretical level and may not be applicable in real manufacturing settings. The authors acknowledge that some references were taken before 2017, considering their importance in the field, such as [1,2].
The paper is organized as follows: Section 2 presents a background overview of the research topic of reducing electrical power consumption. Section 3 treats the energy problems in industrial robotic systems, while Section 4 reviews the energy problems in autonomous vehicle technology (AV) and unmanned aerial vehicles (UAVs). UAVs are also considered autonomous vehicles in certain conditions. Energy consumption problems in embedded systems are presented in Section 5. Finally, some conclusions and suggestions are given to inspire the reader about the future directions that can be taken to optimize the energy consumption in different systems.
2. Background
In recent years, there have been many reviews of energy problems, notably [1,2,3,4]. This section gives an overview of energy problems based on the mentioned reviews in the field of robotics, autonomous vehicles, and embedded systems. In [1], the authors provide an overview of methods for reducing energy consumption in industrial robots. As the authors state, the mechatronics industry uses robots. Energy consumption can be reduced with several methods:
- Developing energy-efficient motion planning;
- Optimizing the operating parameters of industrial robots;
- Optimizing industrial robot operations;
- Commercial and industrial solutions for reducing the energy consumption of industrial robots.
Paryanto et al. [1] also mention that modeling and simulating the industrial process is a way to find the weak points of the production line, where with a careful design, energy consumption can be reduced. Finally, they conclude that applying all mentioned methods is difficult because of many technical problems. But as a new possibility, process simulation can help the early design of energy reduction. As they say, “The simulation approach as a new trend in this field is a promising method due to its use in several manufacturing systems’ development stages, from production planning to process optimization stages” [1]. The paper goes on to propose a modular model of IR for analyzing power consumption and dynamic behavior.
Energy-saving robotic and automatic systems methods were also treated in [3]. Carabin et al. deeply analyze energy-saving strategies in robotics and automation. Energy saving must be considered from the design stage of the robots. As mentioned earlier, the paper considers—correctly—that robots are also embedded systems. Several design considerations are presented and analyzed in depth. The design considerations are as follows [3]:
- Energy saving with hardware design:
- -
- Robot type, which selects the optimal solution for energy-saving using mechatronic solutions;
- -
- Hardware replacement with newer low-power components;
- -
- Hardware addition for energy storing and recovering.
- Energy saving with software methods:
- -
- Robot trajectory optimization;
- -
- Operation scheduling;
- -
- Optimal control strategies.
The authors [3] analyze the methods mentioned above. One thing should be added to the methods mentioned: the main hardware components of robots and automation systems are the microcontrollers and System on Chip (SoC). These components can already reduce the energy consumption of the system by entering power-save mode when necessary. One should mention that the embedded systems’ real-time operating systems can also save energy by reducing electrical power consumption when the plan allows it. Also note that [3] is one of the most complete analyses of robotics energy-saving methods since 2017.
In [4], because of the increasing importance of electric vehicles (EVs), the authors review the effects of the battery degradation process on energy saving in EVs. It is said that electric vehicles have low-carbon and environmentally friendly attributes. But the truth is that they move the environmental effects from use in traffic to the electric power plant. Certainly, we admit that extensive research has been undertaken to decrease the changes in climatic conditions due to air pollution. Batteries are widespread in EVs as excellent energy storage devices. In addition to a long battery recharge time, EVs may have the disadvantages of “impact of additional strain on the grid, poor societal acceptance due to high initial costs, and a lack of adequate charging infrastructure” [4]. In their 2022 review article, Fanoro et al. describe battery degradation, degradation mechanisms, and types of degradation. All energy reduction solutions involve embedded systems; embedded systems can reduce power consumption in the plant (system) since they are integrated and fasten the energy optimization techniques.
Richa et al. [5] review the power consumption of Field Programmable Gate Arrays (FPGAs) and Application Specific Integrated Circuits (ASICs). In some applications, high speed and high performance are the requirements of the embedded system, which will increase energy consumption. The system designer has to consider keeping the trade-off of speed/performance versus the power consumption at a minimum. Optimization methods for the following components are presented in [5]:
- System components and integrated circuits of all kinds;
- Intellectual Property (IP) modules known as reusable fully tested circuits used in FPGA and ASIC;
- Microprocessors, multiprocessor systems, SoC, whose power consumption heavily depends on the system clock frequency and application software;
- Customized instruction set architecture circuits, which are highly optimized for hardware implementation.
Embedded systems, as the basis of control systems of robots, UAVs, and automation systems (since their introduction) have always had a very important design parameter: to keep the power consumption as low as possible. Several energy optimization methods are presented for embedded system components in [5]:
- Extensive system simulations can analyze the energy optimization problem in the hardware of embedded systems. This possibility is given by all Computer Aided Design (CAD) tools and also by FPGA and SoC development tools. This possibility was also analyzed in [5], which gives a power estimation error ranging from 5% to 55% or higher depending on the component types.
- Learning-based methods, which are subsets of artificial intelligence techniques, provide automatic power consumption estimation resulting from experience and using data sets. This method uses neural networks for optimization. This method gives an estimation accuracy between 2% and 10%, depending on the component.
- Statistical-based methods, which have features in common with the simulation method. This method involves applying test vector sequences on the circuits and running tests until a power estimator gives satisfactory results. Estimation errors are around 12.5% to 40%, also depending on the component type.
- Measurement-based methods are a common approach for already implemented hardware and use several built-in onboard and on-chip sensors. The estimation error is mentioned only for microprocessors and SOC, where it was estimated to be higher than 30% for one core and higher than 4% for 16 cores.
Richa et al. [5] give a detailed discussion of power estimation methods, which were analyzed on several criteria, such as hardware and software dependency, circuit characterization based on modeling, estimation effort, estimation error, modeling effort, and modeling levels. Embedded system power consumption is divided into dynamic and static power consumption.
Sparsh et al. [2] also start from this premise and present energy-saving methods in embedded systems. Without reducing the overall merit of the authors, we do not agree with the opinion of [2] that the family of embedded systems includes mobile phones. From our point of view, mobile phones today (2023) are much more multitasking computers and less embedded systems. By definition—from many sources—embedded systems always execute the same task and can have an operating system. Since 2015, mobile phones have become much more like general usage computers, without enumerating the many applications used in such complex devices.
However, the authors of this paper recognize that methods that contribute to the energy-saving problems in embedded systems are reviewed in [2]. Starting from the point of embedded systems’ characteristics, such as the limited size of the battery, computation speed, and limited ventilation possibilities, these factors result in the necessity to reduce energy consumption in embedded systems. However, increasing computation speed (increasing clock frequency) may also increase electrical power consumption. But considering the fact that FPGA and SoC (System on Chip) can both save energy and increase the computation speed by real parallel data processing when used in automation (such as in the automobile industry) and robotics, these solutions can decrease the electric power consumption. In the meantime, one should mention that FPGAs and SoCs still are not characterized by being the lowest power consumption devices.
Based on the literature referred to, the following energy reduction methods in embedded systems can be considered:
- Dynamic voltage and frequency scaling and power-aware scheduling-based techniques;
- Low power mode management—permitted by the chip technology and operating systems;
- Micro-architectural changes in memory management, sometimes adding extra components;
- Using non-conventional chips, such as digital signal processors (DSPs), Graphic Processor Units (GPUs) and FPGA—one should also add SoC or Multi Processor System on Chip (MPSOC);
- Software methods for energy reduction in embedded systems.
The first three methods are analyzed in depth in [2]. The authors highlight the advantages of using FPGA (SoC and MPSoC must also be added) and its important role in energy reduction methods in embedded systems.
3. Energy Consumption Problems in Industrial Robotic Systems
Industrial robots are robotic systems designed to perform specific tasks in manufacturing and production fields. These robots are typically equipped with mechanical arms, grippers, control circuits, and various sensors for automating repetitive and precise work. Figure 1 illustrates a general block diagram of industrial robots. Due to its importance, reducing energy consumption and solving power problems in robotic systems are among the most important subjects in the robotics research field. Many researchers have tried to solve energy problems and improve the power efficiency of these robotic systems. They have used various methods, some of which depend on changing the whole mechanism, while others have tried to improve efficiency by using modern circuits (FPGAs) and advanced machine learning algorithms. Computational complexity is a prevalent concern in robotic systems, leading to increased energy consumption. Different approaches have been taken into consideration, depending on the specific system under study. In [6], the authors address the problem of robot forward dynamics computation. Conventional methods for solving robot forward dynamics are characterized by high computational complexity. Therefore, the Recursive Newton–Euler Algorithm (RNEA) stands out as the most efficient computational procedure for deriving a manipulator’s dynamic equations of motion.
According to [7], the energy-saving methods of industrial robots can be accomplished through the following aspects:
- Making mechanical changes to the robotic system: This involves modifying the mechanical components of the robot system to reduce energy consumption, such as replacing heavy parts with lighter ones, using more efficient motors, and improving the design of the robot to reduce friction.
- Changing the characteristics of the existing robotic system: This method involves adjusting the parameters of the robot system, such as acceleration, speed, and jerk, based on experimental data to optimize energy consumption.
- Creating a virtual model of the robotic system: By developing a virtual model of the robotic system, optimal parameters for energy consumption can be calculated before the robot is built or modified.
- Using energy recuperation methods: This involves recovering the energy that is normally lost during the robot’s operation, such as regenerative braking or using energy storage devices.
- Optimal trajectory planning using modern control methods: This method involves the use of advanced control techniques, such as Model Predictive Control, neural networks, or artificial intelligence to optimize the robot’s trajectory and minimize energy consumption.
- Process planning considering the energy-optimal time for idle states: This method involves optimizing the robot’s process planning, taking into account the time when the robot is in an idle state, to minimize energy consumption.
By implementing these energy-saving methods, industrial robots can reduce their energy consumption, which can lead to significant cost savings and environmental benefits. Industrial robots have become an essential component in many manufacturing processes, enabling faster and more efficient production. However, the high power consumption of these robots has become a concern in recent years. In response to this issue, Benesi et al. [7] conducted research to find methods to decrease power consumption in industrial robotic systems. One of the methods proposed by Benesi and his colleagues involves programming the parameters of the system to optimize the movement or path, without needing to change the existing hardware, such as robots or transporters. This can result in significant energy savings while maintaining the same level of performance. To determine the best parameters for this method, Benesi et al. propose two approaches.
- The first approach is an experimental method, which involves testing different parameters on the actual robotic system to determine which combination yields the lowest power consumption. This method provides the advantage of testing in real-world conditions, but it can be time consuming and expensive.
- The second approach is simulating the robot operations using a virtual model. This method allows for the calculation of optimal parameters before implementing them in the real system, resulting in a more cost-effective and efficient approach. Additionally, simulation allows researchers to test multiple scenarios and optimize the system parameters more effectively.
Benesei et al. [7] determined the optimal parameters of speed and acceleration of the robot movement, which can save up to 40% energy consumption when minimal time is taken against optimal energy consumption. Also, they analyzed various settings of speed and acceleration, which can optimize energy consumption without time losses. The optimal solution presented by this method can have a long setup time because of the software given by the robot manufacturers.
Another study conducted by Wei et al. [8] aimed to build an optimal path for two nodes of a robotic arm by optimizing the energy consumption of the robot while avoiding moving obstacles. To achieve this, they converted the original optimization problem into a quadratic programming problem with equality and inequality constraints. They used neural network AI (artificial intelligence) to find and solve the optimal path problem.
The simulation results showed that the increased node constraint ensured the actual path of the generated path, improving the safety of the actual operation and minimizing the power consumption of the robotic system. Their research highlights the potential of using AI techniques to optimize the energy consumption of robotic systems, leading to more sustainable and cost-effective manufacturing processes.
Hovgard and colleagues [9] also conducted research to reduce the power consumption of robot stations. They defined the problem as a convex mixed-integer nonlinear optimization problem with the aim of reducing power consumption by using the optimal operation time and order of the robot movements. To solve this optimization problem, they used a simulation model of the station to find simplified power models of the robot movements. Then they tested different types of parameter settings to optimize power consumption, such as reducing the speed and acceleration. The results showed that with the same cycle time of the station, the power consumption was reduced by approximately 12%. This research highlights the importance of finding an optimal operation time and order of robot movements to reduce energy consumption in industrial robotic systems.
Over the past five years, the number of industrial robot installations has significantly risen, resulting in increased energy consumption at the process level. In order to meet the goals of Industry 4.0 and reduce energy consumption, there is a need to advance Smart Manufacturing and utilize the Industrial Internet of Things (IIOT).
Guerra et al. [10] investigated the optimization of energy consumption in process-level industrial robots using Design and Analysis of Experiment methodologies. Specifically, the study examines the operating parameters of a Kawasaki ZZX130L, 6 DOF model industrial robot, which include speed, acceleration, payload, and temperature, using a linear factorial experiment analysis. The main objective of the research was to identify which of these parameters contributes the most to energy consumption. The statistical analysis of the data was performed using Minitab 19, a widely used industry standard tool. The results indicated that linear speed and acceleration are the primary factors, contributing to nearly 95% of energy consumption in the first three joints of the Kawasaki robot. The other factors—payload and temperature—account for the remaining energy consumption. Nonetheless, it is crucial to investigate other factors that may contribute to energy consumption and seek ways to minimize power use.
Ying et al. [11] aimed to improve the issue of power consumption in palletizing robots by implementing a path optimization method for the joint driving system. They used an MD1200-YJ palletizing robot as their research subject and developed a multi-factor dynamic model based on the Fourier series approximation method and genetic algorithm. The joint path definition and minimum total power consumption were used as the optimization goal, with the coefficients of the Fourier series as improvement variables and movement parameters of the initial and final positions and running time constant as constraint conditions. By using the optimized Fourier series and simulation analysis, they managed to reduce the total energy consumption by 13.1% and to reduce energy dissipation by 15.3% under the same conditions. However, this method had several drawbacks, including high jerk value, lower motion stability, high computational complexity, slow convergence speed to system stability, and high configuration requirements of the computing equipment. Due to these limitations, this method may have limited practical usage in engineering applications. In conclusion, power saving remains a significant issue in industrial palletizing, and power consumption and low flexibility are the main challenges that most robots designers and operators face.
Deng et al. [12] proposed a new approach to address the instability of initial path parameters and their negative impact on energy consumption reduction. They developed a simplified analytical model for the palletizing robot and then combined it with a differential evolution algorithm to form a power-saving method. This approach improved the initial path parameters gathered by the bionic demonstration system to minimize power consumption during operation. Through both actual experimental results and simulations, the optimized path parameters were found to effectively reduce energy consumption by 16% [12]. Moreover, there were methods developed based on the concept of saving wasted energy to reduce power consumption. Palomba et al. [13] developed a method to decrease the energy consumption of robotic systems that perform repetitive tasks. The technique involves retrofitting the system with devices that can recover and store energy, such as regenerative drives and compliant elements. By doing so, the braking energy that was once wasted can be harvested, and potential elastic energy can be stored and transferred to the system, resulting in lower energy usage by the actuators. To optimize the energy efficiency of the system, the compliant elements need to be designed optimally in terms of stiffness and preload. This was achieved by solving a bounded optimization problem analytically, allowing for the determination of the ideal compliant element parameters that minimize motor electrical energy consumption for a given periodic path executed by the robot. The researchers applied this method to a five-bar mechanism and a 4-DOF SCARA robot and found that it could reduce energy consumption by up to 77.8% with a standard, non-optimized trajectory. With further optimization of the trajectory, even greater energy reduction could be achieved.
Li et al. [14] examined the energy optimal planning of robot trajectories using dynamics, specifically for industrial robots. The main objective was to optimize the robot’s trajectory to achieve both energy efficiency and a smooth path. The proposed method involves designing an optimal path that satisfies both kinematic and dynamic constraints and transforming the trajectory planning problem into a nonlinear optimization problem that adheres to the constraints. The sequential quadratic programming (SQP) method was then utilized to minimize the objective function. The effectiveness of the method was demonstrated through testing on a two-link manipulator with varying loads, as well as a 6-DOF manipulator. The results indicate that the energy consumption of the proposed method is significantly lower than that of the quintic polynomial trajectory, with a reduction rate of 13.95%. Furthermore, the jerk is reduced by 82.3%, resulting in smoother motion for the manipulator. These findings demonstrate the practicality and effectiveness of the proposed method in reducing energy consumption while maintaining a smooth trajectory.
The research of [15] is concentrated on the joint robot placement and motion planning problem for a dual-arm robot, with the objective of minimizing the total execution time and energy utilization for the work-piece transportation process. Nonoyama et al. [15] aimed to develop a model for joint robot placement and motion planning and evaluate the effectiveness of two meta-heuristic algorithms. The goal was to minimize the total execution time and energy usage. Firstly, the problem was formulated, and PID gains were optimized using genetic algorithms (GAs). Then, the PSO algorithm was applied to optimize both the robot configuration and motion simultaneously. The approach was tested on a real-world dual-arm robot and simulated in the K-ROSET environment, showing promising results in terms of energy efficiency and execution time compared to motion planning with PID controllers only. The study suggests that using dual-arm motions can save more energy compared to single-arm motions. Integrating the meta-heuristic method with the robot configuration problem results in a reduction of 18% in energy usage and reduction of 16% in execution time.
In recognition of the significance of power consumption, Tuo et al. [16] proposed a novel approach for predicting the energy consumption of industrial robots based on the end-effector’s motion trajectory and action mode. The method overcomes some of the limitations of traditional energy consumption prediction methods, including their complexity, cumbersome operation, and high costs. The method involves analyzing the energy consumption characteristics and meta-actions of static and dynamic operations of industrial robots. Energy consumption functions are developed for static and dynamic meta-actions, such as axial motion and rotation. The target process motions are then disassembled using a suggested meta-action library, and a calculation model is developed for the energy consumption of each meta-motion. Finally, the energy consumption of the industrial robot during the target process is obtained by integrating the energy consumption functions and calculation models.
In summary, many articles discuss the problem of high power consumption in industrial robotic systems and the various methods that researchers have proposed to reduce energy consumption and improve power efficiency. Some of the discussed methods include the modification of the mechanical components of the robot system, adjusting the parameters of the robot system, creating a virtual model of the robotic system, using energy recuperation methods, optimal trajectory planning, and optimizing process planning. Also presented are some examples of research studies that have used advanced techniques such as artificial intelligence to optimize the energy consumption of industrial robotic systems. The result is that by implementing energy-saving methods, industrial robots can reduce their energy consumption, leading to significant cost savings and environmental benefits. Table 2 summarizes the studies on the energy consumption problems in industrial robotic systems and their proposed solutions.
Merging Energy-Saving Methods in Industrial Robots Systems in the Real World
Because of the importance of this field, there are a lot of methods and research studies which focus on reducing the energy consumption in the industrial robotic systems (see Table 2). While various methods have been researched to reduce power consumption in industrial robotics, not all of these methods have been fully implemented in real-world industry settings. Some of these approaches have been tested using simulators to obtain results. However, the fact that these methods have been tested in simulations does not imply that they cannot be applied in practical industrial scenarios. On the other hand, there are many methods used in the production process. Here are a few examples:
- ABB’s YuMi Collaborative Robot and KUKA’s LBR iiwa: This is designed for collaborative assembly and small-parts-handling tasks. It incorporates energy-efficient features such as optimized motion control algorithms to reduce power consumption during operation. Its design also focuses on lightweight materials and efficient motors to minimize energy usage.
- Universal Robots UR10e: Universal Robots UR10e is known for its collaborative and versatile capabilities. It incorporates energy-efficient servomotors and innovative control algorithms that aim to optimize power consumption without compromising performance.
- Yaskawa Motoman HC10 Collaborative Robot: Yaskawa’s HC10 robot is designed for collaborative tasks in industrial settings. It utilizes energy-efficient components and advanced control techniques to minimize power consumption while maintaining productivity.
These products showcase how robotics companies are integrating energy-saving methods, such as advanced control algorithms, energy recovery systems, optimized motion planning, and the use of efficient components, to develop more eco-friendly and cost-effective robotic solutions for industrial applications.
4. Energy Consumption Problems in Autonomous Systems
Autonomous systems are a rapidly developing research field that may revolutionize many industries and applications in transportation, manufacturing, healthcare, and agriculture. They offer the potential to boost effectiveness, to lower expenses, and to enhance safety. Autonomous systems incorporate sensors, software, and artificial intelligence algorithms to perceive their environment, make decisions, and take actions. However, one of the main challenges autonomous systems face is energy consumption. These systems require significant energy to power their sensors, processors, and other components [17]. This is especially true for autonomous systems designed for mobility autonomous systems, such as autonomous vehicles (AVs) and unmanned aerial vehicles (UAVs).
4.1. Energy Consumption Problems in Autonomous Vehicles
The major ambition of the automotive industry is the marketing of autonomous vehicle (AV) technology. Consequently, research in this area is swiftly expanding across the world. However, despite this high level of research effort, literature addressing straightforward and efficient energy approaches to developing an autonomous vehicle research platform is sparse [18]. This review section highlights the main problems and optimization regarding energy in automated vehicles in the scope of both standard autonomous vehicles (AVs) and Electrified Autonomous Vehicles (EAVs). Autonomous vehicles are emerging embedded systems, and of course, energy may be considered one of the most important related issues. The biggest challenge facing AV energy consumption is the requirements for attached sensors, control systems, computer processing units, remote data transfer protocols, and networking hardware as demonstrated in Figure 2. These systems are needed to perceive surrounding real-world circumstances and respond to real-time decisions [19]. Additionally, vehicle weight and probably higher drag may raise the energy consumption of AVs compared to human-driven vehicles [20]. These extra loads dilate the auxiliary load profile, consequently decreasing the range of an automated vehicle. Furthermore, additional electrical loads can be appended on fully autonomous vehicles due to fail-safe requirements from the sensor to vehicle control [19]. Thus, increasing energy efficiency has been the subject of numerous studies for decades.
Eco-driving is an effective technology for realizing significant energy efficiency and achieving sustainable transportation [21,22]. Eco-driving refers to adopting a driving approach to conserve energy and minimize harmful emissions. Figure 3 shows the general notation of the eco-driving system. A more energy-efficient drive cycle can be achieved for the same route by adopting a heuristic set of goals, such as eliminating stops, preserving a constant speed, limiting acceleration, and smoothing the velocity profile. In this way, energy economy improvements of 10% can be achieved for modern vehicles and 30% for fully autonomous vehicles [23,24]. Furthermore, applying eco-driving can result in longer battery life and slower battery degradation. The formulation of maximizing energy efficiency improvement problem as an optimal control problem can be accomplished by predicting the driving circumstances along the route through eco-driving. These predictions can be sensed by the technology of vehicle sensors, vehicle to vehicle (V2V), and vehicle to infrastructure (V2I). Many studies have shown that exploiting these factors can improve power efficiency, and that predictions of traffic light signal phase and timing (V2I technology) can raise the improvement to 27% [20,25].
Using V2I (enabling traffic light prediction) can decrease power consumption in eco-driving [26]. Other methods are proposed using information from the leading vehicle and the data from traffic lights for red light avoidance, putting constraints on vehicles in green light queues, and optimizing the speed and power distribution between the motor and engine under A/C load [27]. Furthermore, implementing Model Predictive Control (MPC) and Dynamic Programming (DP) has been considered in a leading vehicle-following scenario. Leading vehicle-following driving is a type of cooperative driving strategy used in autonomous vehicles to improve safety, power efficiency, and comfort. In AVs, the leading vehicle-following scenario can be implemented using sensors and cameras to monitor the leading vehicle’s movements and adjust the following vehicle’s speed and acceleration accordingly. By maintaining a safe distance and matching the leading vehicle’s speed and acceleration, the following vehicle can take full advantage of the aerodynamic drafting effect, resulting in improved fuel efficiency and reduced energy consumption [28,29].
Vehicle velocity prediction is an essential technique for realizing improvements in the energy economy and determines the constraints of the energy optimization problem [30,31]. Energy saving in AVs can be degraded due to inaccurate velocity prediction, resulting in reduced fuel efficiency and increased energy consumption [32]. Many researchers have recognized self-driving vehicle possibilities for adapting Artificial Neural Network (ANN) prediction models in which their outputs can improve the power economy through control strategy derivation [33]. Other approaches have shown remarkable performance using artificial intelligence (AI) techniques [32,33,34,35].
The energy required by AVs can be supplied from different sources, like batteries, Ultra-Capacitors (UC), and Fuel Cells (FC). The two important criteria of energy sources are high energy density and high power density. High-energy sources can provide long ranges, while high power sources aid in maximizing acceleration. Other characteristics required for the perfect energy source are fast charging, long life cycle, long service and less maintenance, and lower cost [36].
Batteries have been considered the most prominent energy source for a long time for electrical vehicles (EVs) and have many different technologies that are still in research and development. Some common battery technologies used in EVs are Li-ion, Li-polymer, Ni-Cd Na-S, Ni-MH, Zn-air, Ni-Zn, lead-acid, and graphene. Various battery kinds possess advantages and disadvantages that should be carefully studied when choosing among them. Batteries represent a remarkable reason for concern because of the pack size and how much weight they add to the vehicle. The battery has an impact on the range and charging time as well. In general, many useful battery technologies have already been invented, but at this point they are limited and not being pursued due to their exorbitant costs [37,38].
Ultra-Capacitors (UCs) physically store charges in two electrodes separated by an ion-enriched liquid dielectric. This technology can provide significantly high power density. Also, while no chemical reaction takes place in the electrodes, the UC life cycle is often long. However, the absence of these reactions makes them lower energy density. Additionally, their internal resistance is low, making them highly efficient, but if charged at an extremely low state, it can result in a large output current [39]. Fuel Cells (FCs) consist of an anode, cathode, and electrolyte between them and can generate electricity by electro-chemical reaction after applying fuel (i.e., hydrogen) to the anode. Electric Vehicles that are powered by FCs can gain many advantages like fast refueling, low or no emissions, durability, and the capacity to produce high-density current outputs. On the other hand, FU technology is high cost, requires larger fuel tanks since hydrogen has less density compared to petroleum, and has a lower response time compared to batteries and UCs [40,41]. In [42], the authors present an optimal control model to determine a Puma robot’s point-to-point trajectories while maximizing the energy regenerated and stored in the UCs. The research demonstrates that the developed model effectively reduces energy consumption by approximately 10% to 22% as the Puma robot’s operating time increases. Since hydrogen has no color, leaking hydrogen can be seriously harmful and difficult to detect. Additionally, it is highly flammable and explosive in the event of collisions. The car industry has taken steps to assure the tank’s integrity in response to these issues; they have encased them with carbon fibers. There are procedures to lock the tank outlet in case of a high-speed collision, and the hydrogen-handling components can be positioned outside the cabin, allowing the gas to disperse easily in case of a leak [43].
After mentioning the power problems regarding EVs, in contrast, charging is considered an essential issue. Since the charge is stored as DC in batteries and UCs, various voltage and current configurations are available for AC or DC charging. AC supply systems require AC-DC converter circuits to obtain the charging from the grid. DC supply systems need special cabling and installation to be mounted on stations and garages [44]. EVs are regarded as high-power loads that influence the power distribution system [45]. Therefore, random and uncoordinated charging actions can overwork the distribution system by raising peak demands. It can also cause extreme voltage fluctuations, increasing losses, hastening the aging of transformers and cables, lowering system efficiency and economy, and raising the possibility of blackouts as a result of network overload [46,47,48]. Load management and network energy efficiency can be improved by integrating smart grid functions in networking, communication, and monitoring [49,50,51].
The time required to reach full charge is one of the most important factors; the long-time charging of batteries and UCs represents the main downside issue in EVs [21]. Charging might take anywhere from a few minutes to several hours, depending on the battery pack and type of charger. Uncontrolled charging (also referred to as dump charging) occurs when there is no concern about the timing of power drawn from the grid. This can cause unbalancing the load, instability, minimizing reliability, and reducing power quality. Nowadays, many fast-charging technologies exist and are being researched [52]. Wireless charging is the technology of transferring energy between primary and secondary circuits without using cabling. However, due to the health and safety issues with this technique, it is not common for commercial EVs, which are regulated by the standardization organizations in each country. While FC vehicles do not need to be charged as other EVs do, they require enough hydrogen filling stations and a practical method to produce the hydrogen [53,54].
Efficient Energy-Saving Methods in Autonomous Vehicles
The advancement in the AV industry promises to revolutionize the future of transportation systems and stands out as a significant stride towards safer, more efficient, and accessible mobility. Optimizing energy consumption is crucial for their efficiency and environmental impact. In general, the optimization aspects for saving energy methods can be categorized into two primary aspects:
- The design aspects: They primarily include the configuration of vehicle components, namely batteries, motors, and body structure. These elements are recognized as foundational factors contributing to the AV driving range extension.
- The control aspects: They pertain primarily to control various vehicle subsystems, including the braking system, steering system, and active suspension system.
Considering these mentioned aspects, numerous automobile manufacturers today are actively incorporating various energy-saving approaches into their cutting-edge vehicle models as stated below:
- Regenerative Braking: This involves converting kinetic energy into electrical energy during braking and storing it in the vehicle’s battery.
- Predictive Cruise Control: This optimizes speed and acceleration patterns based on road circumstances.
- Efficient Powertrains: They utilize high-efficiency electric motors and power electronics.
- Low-Rolling Resistance Tires: These reduce the energy required to move the vehicle.
- Weight Reduction: This reduces the overall weight of the vehicle by using lightweight materials.
- Aerodynamic Design: This streamlines the vehicle’s shape to reduce air resistance.
- Battery Management Systems (BMSs): They monitor and manage the battery’s state to optimize charging and discharging processes, extend the battery’s life, and maintain its efficiency.
- Smart HVAC (heating, ventilation, and air conditioning) Systems: Using predictive climate control algorithms can help manage the vehicle’s interior temperature with minimal impact on the battery.
- Energy-Efficient Software Algorithms: Software algorithms for decision-making, navigation, perception, and control algorithms contribute to overall energy savings.
- Dynamic Route Planning: Real-time traffic and road condition data are utilized to optimize routes, avoid congestion, and reduce energy consumption.
4.2. Energy Consumption Problems in Unmanned Aerial Vehicles
UAV (acronym of “unmanned aerial vehicle”), known as a drone, is an uninhabited aircraft in the field of aerial robotics. The system can be autonomous or remotely piloted [55]. The drones can carry out various missions for civil or military uses depending on their type: this is based on the characteristics and control capabilities in different environments. A drone’s performance is measured by how it reacts to the various factors of the environment, such as aerodynamic phenomena, disturbances (winds), etc. [56]. With the evolution of electronics and embedded systems technology, the production of miniaturized embedded systems and sensors became possible. Therefore, the internal body of the drone became small and optimized. In this context, the quadrotor type presents a great example of mini drones, where its usage in real life has been increasing, especially in the last four years with the appearance of the pandemic and COVID-19 crisis; these systems became an excellent solution for delivery purposes and fulfilling logistics tasks [57,58,59].
Besides the advantages of UAVs in solving many problems in different fields, a potential drawback arises with this technology regarding energy consumption, where the drone is an electric device powered by embedded batteries with a limited lifetime. This has an effect on limiting the flight time of drones. Therefore, most UAV applications are unable to reach their entire target. Nowadays, researchers in many literature reviews are placing their focus on minimizing energy consumption in UAV missions to deal with this topic. First, we should identify the proper and complete model energy consumption of UAVs. This is achieved by identifying the key factors that directly affect the energy profile of the drone [60].
Nowadays, UAV manufacturers of professional drones are betting everything on great autonomy. The American drone Tailwind has broken all records by flying for 4 h 30 min in the Californian sky. Other models use Fuel Cells, kerosene, or solar energy [61]. In this paper, we mostly focus on the electric type, the small entry-level models, the nano drones, or mini drones, which are at the bottom of the scale with flight times between 5 and 10 min; this type is still far from having 1-h autonomy. Some examples of the most powerful models, like the DJI Mavic 2 Pro, the Yunnec Mantis Q, or the Fimi X8 SE, can expect to fly for about thirty minutes at maximum. Apart from the capacity of the battery capacity expressed in mAh, several factors are taken into account to affect the power/energy consumption of the drone, so the autonomy is limited [62]:
- Impact of taking off;
- Impact of movement (hovering, horizontal movement and vertical movement);
- Impact of payload: Increasing the mass of the drone affects the gravitational force, where energy is needed to keep the drone flying by keeping the stability;
- Impact of speed: Increasing the drone’s velocity is achieved by increasing the torque of the rotors, which require a high current;
- Impact of wind: The wind is a disturbance that affects the drone’s movement. Therefore, an opposite force should be applied to compensate for it. This opposite force is generated with higher energy consumption;
- Impact of communication: Internal communication is executed with different sensors, between the controller and sensors such as GPS, Gyroscope, accelerometer, etc.
Energy Performance of Power Source in UAV
The power source system in the drone can be characterized by different types [63], such as batteries, solar power, Fuel Cells, combustion engines, etc. Figure 4 shows drone power sources with different types of material.
UAVs are usually powered by a 12 V battery. They are composed of different motors controlled by ESC motor controllers (electronic cards that allow the motors to turn more or less quickly). Thanks to the propellers connected to the axes, the drone can move with six degrees of freedom according to the three axes [64]. Different sensors are board on the drone body:
- The gyroscope measures the orientation of the drone;
- The accelerometer measures the linear acceleration;
- The ultrasonic measures the distance from a target.
These sensors send information to the flight controller. The telecommunication module allows receiving the orders transmitted by the pilot’s remote control to indicate the positioning and transmit the video signal. Figure 5 shows the drone body components, while Figure 6 shows the relation between these modules.
In batteries for example, we find several suggestions, such as lithium-ion, nickel cadmium, lithium polymer, lithium-air, and lithium-SOCl2. Every type depends on the usage and the drone’s size. Li-SOCl2 batteries afford two-times-higher energy density per Kg compared to others. While Li-air batteries can achieve results up to seven times higher, they are much more expensive than Li-Po and Li-ion. Usually, Li-ion batteries are suitable for EV applications.
The efficient battery type for a specific drone can be identified by analyzing the following criteria:
- The power density affects the acceleration capabilities;
- Energy density to identify the range;
- Weight and volume, which affect the range of the system;
- Cycle life to find out how often the battery should be replaced;
- Cost regarding the budget;
- Safety and maintenance.
The power density is the value that the power source can provide at a specific instance. In contrast, the energy density is the value that determines how long that amount of power can be delivered.
Many literature reviews highlighted several solutions regarding the drawbacks of drone battery systems and how to optimize the energy consumption of drones. Different solutions were proposed targeting the software and hardware level.
Some software solutions are focused on trajectory planning, which presents a reference input for the drone; based on the data received from that input, the drone will execute the commands. Therefore, generating an optimal trajectory from point to point can be an effective solution, almost avoiding the singularities of the system and the motions that require higher voltage for the rotors. Nowadays, the optimal trajectory is generated by combining AI algorithms such as genetic algorithm, Ta-bu search, etc. Another solution is adopted by researchers based on the design of an optimal control law by generating a cost function from velocity and trying to minimize it. Different strategies are adopted in this field, some of which are linear [65], such as linear MPC (Model Predictive Control), LQR (Linear Quadratic Regulator), and H∞, and some of which are nonlinear, such as nonlinear MPC, back-stepping and slave mode.
At the hardware level, a hybrid system implementation is recommended by utilizing different power sources instead of relying solely on one power source, which maintains the lightweight design of the drone. As the drone market has different types of batteries, using a good type can also solve the problem. The latest research started to include super-capacitor technology, which presents a great solution to solve the energy storing problem.
5. Energy Consumption Enhancement in Embedded Systems
The power consumption estimation of embedded systems is a very sensitive problem from the beginning of embedded system design. This process is crucial for energy optimization. Embedded design system parameter optimizations can result in design metric competition. Decreasing power consumption will result in performance and size reduction. The problem can be more critical when analyzing real-time embedded systems. Real-time embedded systems with single or multiple processors need task scheduling. A good task scheduler can save energy in the embedded system. The most critical performance parameters of processor scheduling for real-time embedded systems are reliability, execution time, and energy consumption. Optimizing the energy consumption of processor scheduling is considered very useful to achieve the balance in the time limit requirements, reliability, and increased power efficiency. Reference [66] presented how to optimize the energy consumption of the processor under three constraints:
- Partial ordering relations between task modules;
- Time limit;
- Reliability.
Xiong et al. [66] developed algorithms for increasing power efficiency usage in multiple processors’ real-time embedded systems. Based on DAG (Directed Acrylic Graph) and QPSO (Quantum Particle Swarm Optimization), each processor can determine the operating mode through a heuristic search algorithm. These algorithms were named Directed Acrylic Graph Quantum Particle Swarm Optimization algorithm versions I and II (DAG_QPSO_I, and its improvement DAG_QPSO_ II). Using different operating modes, every embedded processor has different voltage, frequency, and power consumption. This results in different execution times, energy consumption, and reliability of the tasks, which change with the operating modes of the processors. In a system with multiple embedded processors, it is critical to schedule and select the suitable operating mode of the processors. The presented algorithms optimize the task scheduling, and as a result, the power consumption is also optimized. Figure 7 compares the performance of the two algorithms in terms of number of nodes and power consumption.
The conflict between the energy consumption demands of current modern processors and the constrained battery capacity becomes more visible with the widespread use of real-time embedded systems. One of the best energy management technologies identified is the method called dynamic voltage scaling (DVS). Most current research shows that the use of DVS increased processor transient fault rates, which is the result of the size of logic gates (and their component transistors) getting smaller and smaller.
Liu et al. [67] considered allocating processing frequencies to a collection of periodic real-time functions to reduce the total energy usage while maintaining reliability and timeliness. Depending on the meta-heuristic algorithms. Liu et al. [67] achieved the best energy consumption optimization and guaranteed the embedded systems’ reliability using a modern algorithm called ADWSOA (Adaptive Differential Whale Swarm Optimization) according to the optimization requirements. WSOA (Whale Swarm Optimization Algorithm) is an algorithm for function optimization inspired by the whales’ behavior of communicating with each other via ultrasound for hunting. This algorithm is very powerful in solving multiprocessor scheduling problems, including NP-hard problems, such as the traveling salesman problem, vehicle routing classification problems, and the routing problems of wireless sensor networks (WSNs). After applying the ADWSOA, they saved the optimized data from the algorithm on a chain using the blockchain’s storable functionality, which could affect important queries and result in a problem with the embedded system data security. Because of that, they used DPCA (Differential Privacy on Chain Creating) algorithm to safeguard the chain’s data security. The experimental results proved that the ADWSOA can minimize energy consumption in real-time embedded systems while maintaining security and reliability [67].
Because of the importance of deep learning applications in embedded systems, many researchers have directed their attention toward enhancing energy efficiency by merging neuromorphic accelerators (µBrain). Varshika et al. [68] aimed to increase the speed of SDCNNs (Computations of Spiking Deep Conventional Neural Networks) by designing multi-core neuromorphic hardware based on µBrain for improving energy efficiency. The capacity of the neuron cores and synaptic connections must be heterogeneous in order to reduce energy consumption (i.e., big vs. little cores). Compared to mesh-based Network-on-Chip (NOC), the run time and power consumption will be reduced due to how the cores are connected (using a parallel segmented bus interconnect). In [68], it is suggested to use SentryOS (a compiler and run-time scheduler) as a system software framework to link SDCNN inference applications to improve the system’s throughput and optimize energy consumption for existing previous design layouts. As a result of the study, the improvements were as follows:
- Energy consumption is reduced between (37 and 98)%.
- Latency is reduced between (9 and 25)%.
- The application throughput is increased between (20 and 36)%.
Achieving reliability and optimal energy consumption is vital in designing most of the embedded system MPSoCs (multiprocessor systems on chip). Saberikia et al. [69] searched for solutions to increase the efficiency and reliability of the real-time MPSoC systems by:
- Determining the safe range of speed for processors by finding the efficient points on thee of energy-reliability versus processor speed.
- Calculating appropriate speeds for the processors that run the primary task, hot and cold backups.
- Using the appropriate mapping to reduce the overlap of primary and backup tasks.
Comparing the proposed plan to the prior modern techniques, energy consumption is reduced by 11% to 42% on average while maintaining a high level of reliability of 97%.
Multicore systems need a new point of view of software engineering when using parallel computing methods. In multicore systems, the effect of cache usage affects the robot control. From the processor-architecture level, frequent access to register files intensively can be considered a contemporary issue of power consumption.
A novel architecture presented by [70] is referred to as a selective register file cache incorporated with multi-banked register file organization. This caching technique can lessen the load on the register file during read/write operations by capturing the actively reused and short-lived operands in the register file. This architecture saves about 68% over conventional embedded processors and about 51% compared to Reduced Instruction Set Computer (RISC) processor architectures. However, this saving is gained at the expense of additional hardware usage.
In general, traditional approaches to conserving power primarily involve reducing the processor’s operational speed to minimize power usage in an embedded system. However, power-efficient computing systems prioritize enhanced energy efficiency over mere power reduction. Unfortunately, the downside of decreasing power consumption is that it typically leads to decreased performance efficiency, resulting in longer task completion times due to this performance decline. In an effort to balance energy power consumption and efficiency, the paper [71] suggests using a power measurement utility for a reinforcement learning (PMU-RL) technique to modify how embedded heterogeneous platforms’ resources are used dynamically. In this manner, a reinforcement learning (RL) method is employed to assess and enhance the utilization of resources within the FPGA control state feature. The FPGA system is designed for a simulation environment utilizing an AMD ZYNQ MPSoC board. The study focuses on establishing a balanced operational mode that can dynamically modify the programmable logic (PL) state to enhance both power efficiency and performance. This approach is based on an RL algorithm capable of swiftly identifying the optimal configuration of the PL for various workloads, thereby improving energy efficiency. The outcomes reveal a significant 18% reduction in energy consumption without adversely impacting the application’s performance. Consequently, the proposed PMU-RL technique may have applicability in diverse heterogeneous computing platforms [72].
Table 3 shows the most important research in enhancing the power consumption in embedded systems and the relevant cutting-edge solutions.
Industrial Solutions or Energy Saving in Embedded Systems
In this section, methods which reduce energy consumption in the embedded systems (see Table 3) are summarized, in addition to some good practices used in industry.The low power consumption of embedded systems depends on the way the system is designed. Does the embedded system have operating system or not? Firstly, processors and micro-controllers have the possibility to reduce power consumption with the switching of several parts of the system or even go in sleep mode if the working conditions allow it. Also, reducing the system clock frequency (when this is not critical), one can reduce the power consumption of the processor/micro-controller. The embedded system software and firmware have many possibilities to reduce power consumption (i.e., operating system function). But this method requires careful consideration and expertise of the product designer. When choosing peripherals, the designer considers various peripherals that consume less power. Also, considering IOTs, they can be switched off or forced to go into low power mode when their usage is not necessary, similar to wireless units. The mentioned power reduction possibilities for embedded systems are very common methods in product design.
6. Conclusions
In this paper, an overview of the energy consumption of different robotic systems is discussed. The energy consumption analyses regarding various systems were studied, starting from the most complex systems (such as industrial robots and autonomous robots) to the basic ones (embedded systems). Most industrial robots suffer from energy consumption, which is very hard to calculate. Due to that, all of the research is focused on solving this problem by saving reliability and reducing the execution time. The most common solution is to find the optimal path by finding the best speed and accelerating parameters. Optimal trajectory generation can be executed using AI techniques, such as the genetic algorithm, Dijkstra algorithm, Ta-bu search, and fuzzy interpolation.
Autonomous vehicles have become very popular and are fast spreading nowadays. However, energy consumption is still a hot research area to this day. Energy problems regarding AVs can be summarized into power supply sources, the attached sensors and vision devices, control systems, networking, and communication devices. Batteries are still the dominant power source, but the main drawbacks are the high cost, the limited range, and the charging time. Super-capacitors can be a solution for energy storage, but they are still under research.
Eco-driving is a current energy technology that can reduce power effectively. Eco-driving combined with several methods, like a heuristic search for goals, predictive driving circumstances, velocity prediction, Model Predictive Control, and an Artificial Neural Network prediction model, can upgrade the energy efficiency.
In the case of UAVs, energy consumption depends on several factors related to environmental parameters, such as wind and gravity associated with the drone’s payload. Additionally, the type of power source significantly impacts maintaining flight time and the communication between the pilot and the drone. These factors can be compensated using different solutions at the software or hardware level. Software solutions generate an optimal path that avoids the drone’s singularities and motions that consume higher voltage for the rotors. Another solution is given by building an optimal control law that optimizes a cost function related to the velocity. At the hardware level, it is recommended to implement a hybrid power system utilizing different power sources to preserve the lightweight construction of the drone. Alternatively, addressing the issue can be accomplished by using a high-performance battery, or as previously suggested within autonomous vehicle systems, super-capacitors may serve as a viable solution for addressing energy storage challenges. The energy optimization problem in embedded systems will always be a problem for real-time computing with or without operating systems. The problem leads to software and hardware solutions. Designing embedded systems is always an optimization problem between the design parameters, such as computation speed versus power dissipation. Achieving reliability and optimal energy consumption is vital in designing most MPSoCs. Furthermore, an analysis is necessary for a given application if it really needs MPSoC (such as mobiles) instead of optimizing the application using one processor and consuming less energy. Finally, one can conclude that we cannot propose a universal solution for solving the energy problems in automation and robotic systems. The answer always depends on the cost function of the situation at hand.
Author Contributions
Conceptualization, J.V., O.M.S., H.M.R. and R.B.; methodology, J.V., O.M.S., H.M.R. and R.B.; validation, J.V., O.M.S., H.M.R. and R.B.; formal analysis, J.V., O.M.S., H.M.R. and R.B.; investigation, J.V., O.M.S., H.M.R. and R.B.; resources, J.V., O.M.S., H.M.R. and R.B.; writing—original draft preparation, J.V., O.M.S., H.M.R. and R.B.; writing—review and editing, J.V., O.M.S., H.M.R. and R.B.; visualization, O.M.S., H.M.R. and R.B.; supervision, J.V.; project administration, R.B. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data are contained within the article.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| MDPI | Multidisciplinary Digital Publishing Institute |
| DOAJ | Directory of open access journals |
| LD | Linear Dichroism |
| DAG_QPSO | Directed Acrylic Graph Quantum Particle Swarm Optimization Algorithm |
| ADWSOA | Adaptive Differential Whale Swarm Optimization |
| ABC | Artificial Bee Colony |
| ACO | Ant Colony Optimization |
| DVS | Dynamic Voltage Scaling |
| ESC | Electronic speed controller |
| WSN | Wireless Sensor Network |
| DPCA | Differential Privacy On-Chain Creating |
| SOC | System on Chip |
| NOC | Network on Chip |
| SDCNN | Spiking Deep Conventional Neural Network |
| MPSoC | Multi-Processor Systems On Chip |
| UAV | Unmanned Aerial Vehicle |
| GPS | Global Positioning System |
| MPC | Model Predictive Control |
| LQR | Linear Quadratic Regulator |
| AV | Autonomous Vehicle |
| EV | Electric Vehicle |
| DP | Dynamic Programming |
| ANN | Artificial Neural Network |
| DNN | Deep Neural Network |
| FPGA | Field Programmable Gate Array |
| ASIC | Application Specific Integrated Circuit |
| MPSoC | Multiprocessor System on Chip |
| IP | Intellectual Property |
| IIOT | Industrial Internet of Thing |
| UC | Ultra-Capacitor |
| FC | Fuel Cell |
| AC | Alternating Current |
| DC | Direct Current |
| GPS | Global Positioning System |
| SDCNN | Spiking Deep Conventional Neural Network |
| CAD | Computer Aided Design |
| DSP | Digital Signal Processor |
| GPU | Graphics Processing Unit |
| AI | Artificial Intelligence |
| V2V | Vehicle to Vehicle |
| V2I | Vehicle to Infrastructure |
| LSTM | Long Short-Term Memory |
| RISC | Reduced Instruction Set Computer |
| GA | Genetic Algorithm |
| PL | Programmable Logic |
| RL | Reinforcement Learning |
| PMU-RL | Power Measurement Utility for a Reinforcement Learning |
| RNEA | Recursive Newton–Euler Algorithm |
| BMS | Battery Management System |
| HVAC | Heating, Ventilation, and Air Conditioning |
References
- Paryanto, P.; Brossog, M.; Bornschlegl, M.; Franke, J. Reducing the energy consumption of industrial robots in manufacturing systems. Int. J. Adv. Manuf. Technol. 2015, 78, 1315–1328. [Google Scholar] [CrossRef]
- Sparsh, M. A survey of techniques for improving energy efficiency in embedded computing systems. Int. J. Comput. Aided Eng. Technol. 2014, 6, 440–459. [Google Scholar] [CrossRef]
- Carabin, G.; Wehrle, E.; Vidoni, R. A Review on Energy-Saving Optimization Methods for Robotic and Automatic Systems. Robotics 2017, 6, 39. [Google Scholar] [CrossRef]
- Fanoro, M.; Božanić, M.; Sinha, S. A Review of the Impact of Battery Degradation on Energy Management Systems with a Special Emphasis on Electric Vehicles. Energies 2022, 15, 5889. [Google Scholar] [CrossRef]
- Richa, M.; Prévotet, J.C.; Dardaillon, M.; Mroué, M.; Samhat, A.E. High-level power estimation techniques in embedded systems hardware: An overview. J. Supercomput. 2022, 10, 20. [Google Scholar] [CrossRef]
- Kvrgic, V.; Vidakovic, J. Efficient method for robot forward dynamics computation. Mech. Mach. Theory 2020, 145, 103680. [Google Scholar] [CrossRef]
- Benesl, T.; Bradac, Z.; Bastan, O.; Arm, J.; Kaczmarczyk, V. Methods to Decrease Power Consumption in Industrial Robotics. IFAC-PapersOnLine 2018, 51, 271–276. [Google Scholar] [CrossRef]
- Wu, W.; Zha, X.; Yu, Q.; Pang, J. Trajectory Deformation Based on Energy Optimization and Obstacle Avoidance. In Proceedings of the 2018 IEEE 9th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER), Suzhou, China, 29 July–2 August 2019. [Google Scholar]
- Hovgard, M.; Lennartson, B.; Bengtsson, K. Applied energy optimization of multi-robot systems through motion parameter tuning. CIRP J. Manuf. Sci. Technol. 2021, 35, 422–430. [Google Scholar] [CrossRef]
- Guerra-Zubiaga, D.A.; Luong, K.Y. Energy consumption parameter analysis of industrial robots using design of experiment methodology. Int. J. Sustain. Eng. 2021, 14, 996–1005. [Google Scholar] [CrossRef]
- He, Y.; Mei, J.; Fang, Z.; Zhang, F.; Zhao, Y. Minimum energy trajectory optimization for driving systems of palletizing robot joints. Math. Probl. Eng. 2018, 2018, 7247093. [Google Scholar] [CrossRef]
- Deng, Y.; Zhou, T.; Zhao, G.; Zhu, K.; Xu, Z.; Liu, H. Energy Saving Planner Model via Differential Evolutionary Algorithm for Bionic Palletizing Robot. Sensors 2022, 22, 7545. [Google Scholar] [CrossRef] [PubMed]
- Palomba, I.; Wehrle, E.; Carabin, G.; Vidoni, R. Minimization of the energy consumption in industrial robots through regenerative drives and optimally designed compliant elements. Appl. Sci. 2020, 10, 7475. [Google Scholar] [CrossRef]
- Li, Y.; Wang, Z.; Yang, H.; Zhang, H.; Wei, Y. Energy-Optimal Planning of Robot Trajectory Based on Dynamics. Arab. J. Sci. Eng. 2023, 48, 3523–3536. [Google Scholar] [CrossRef]
- Nonoyama, K.; Liu, Z.; Fujiwara, T.; Alam, M.M.; Nishi, T. Energy-efficient robot configuration and motion planning using genetic algorithm and particle swarm optimization. Energies 2022, 15, 2074. [Google Scholar] [CrossRef]
- Tuo, J.; Peng, Q.; Zhang, X.; Li, C. Energy Consumption Prediction Method for Industrial Robots. China Mech. Eng. 2022, 33, 2727. [Google Scholar]
- Zhang, T.; Li, Q.; Zhang, C.S.; Liang, H.W.; Li, P.; Wang, T.M.; Li, S.; Zhu, Y.; Wu, C. Current trends in the development of intelligent unmanned autonomous systems. Front. Inf. Technol. Electron. Eng. 2017, 18, 68–85. [Google Scholar] [CrossRef]
- Brown, N.E.; Rojas, J.F.; Goberville, N.A.; Alzubi, H.; AlRousan, Q.; Wang, C.; Huff, S.; Rios-Torres, J.; Ekti, A.R.; LaClair, T.J.; et al. Development of an energy efficient and cost effective autonomous vehicle research platform. Sensors 2022, 22, 5999. [Google Scholar] [CrossRef]
- Baxter, J.A.; Merced, D.A.; Costinett, D.J.; Tolbert, L.M.; Ozpineci, B. Review of electrical architectures and power requirements for automated vehicles. In Proceedings of the 2018 IEEE Transportation Electrification Conference and Expo (ITEC), Long Beach, CA, USA, 13–15 June 2018; pp. 944–949. [Google Scholar]
- Mohan, A.; Sripad, S.; Vaishnav, P.; Viswanathan, V. Trade-offs between automation and light vehicle electrification. Nat. Energy 2020, 5, 543–549. [Google Scholar] [CrossRef]
- Mahmoud, Y.H.; Brown, N.E.; Motallebiaraghi, F.; Koelling, M.; Meyer, R.; Asher, Z.D.; DontchevA; Kolmanovsky, I. Autonomous Eco-Driving with Traffic Light and Lead Vehicle Constraints: An Application of Best Constrained Interpolation. IFAC-PapersOnLine 2021, 54, 45–50. [Google Scholar] [CrossRef]
- Fafoutellis, P.; Mantouka, E.G.; Vlahogianni, E.I. Eco-Driving and Its Impacts on Fuel Efficiency: An Overview of Technologies and Data-Driven Methods. Sustainability 2021, 13, 226. [Google Scholar] [CrossRef]
- Xu, Y.; Li, H.; Liu, H.; Rodgers, M.O.; Guensler, R.L. Eco-driving for transit: An effective strategy to conserve fuel and emissions. Appl. Energy 2017, 194, 784–797. [Google Scholar] [CrossRef]
- Meseguer, J.E.; Toh, C.K.; Calafate, C.T.; Cano, J.C.; Manzoni, P. Driving styles: A mobile platform for driving styles and fuel consumption characterization. J. Commun. Netw. 2017, 19, 162–168. [Google Scholar] [CrossRef]
- Connor, W.D.; Wang, Y.; Malikopoulos, A.A.; Advani, S.G.; Prasad, A.K. Impact of connectivity on energy consumption and battery life for electric vehicles. IEEE Trans. Intell. Veh. 2020, 6, 14–23. [Google Scholar] [CrossRef]
- U.S. DOE. Connected and Automated Vehicles Capstone Report; Technical report; U.S. DOE Office of Energy Efficiency & Renewable Energy EERE: Washington, DC, USA, 2020. [Google Scholar]
- Amini, M.R.; Gong, X.; Feng, Y.; Wang, H.; Kolmanovsky, I.; Sun, J. Sequential opt of speed, thermal load, and power split in connected hevs. In Proceedings of the 2019 American Control Conference (ACC), Philadelphia, PA, USA, 10–12 July 2019; pp. 4614–4620. [Google Scholar] [CrossRef]
- Nazari, S.; Prakash, N.; Siegel, J.; Stefanopoulou, A. On the effectiveness of hybridization paired with Eco-Driving. In Proceedings of the 2019 American Control Conference (ACC), Philadelphia, PA, USA, 10–12 July 2019; pp. 4635–4640. [Google Scholar]
- Deshpande, S.R.; Gupta, S.; Gupta, A.; Canova, M. Real-Time Ecodriving Control in Electrified Connected and Autonomous Vehicles Using Approximate Dynamic Programing. ASME J. Dyn. Syst. Meas. Control 2022, 144, 011111. [Google Scholar] [CrossRef]
- Dadras, S.; Jamshidi, H.; Dadras, S.; Pilutti, T.E. Novel Stop Sign Detection Algorithm Based on Vehicle Speed Profile. In Proceedings of the 2019 American Control Conference (ACC), Philadelphia, PA, USA, 10–12 July 2019; pp. 3994–3999. [Google Scholar]
- Dadras, S. Path Tracking Using Fractional Order Extremum Seeking Controller for Autonomous Ground Vehicle. SAE Tech. Pap. 2017. [Google Scholar] [CrossRef]
- Gaikwad, T.; Rabinowitz, A.; Motallebiaraghi, F.; Bradley, T.; Asher, Z.; Fong, A.; Meyer, R. Vehicle Velocity Prediction Using Artificial Neural Network and Effect of Real World Signals on Prediction Window. SAE Tech. Pap. 2020, 0148–7191. [Google Scholar] [CrossRef]
- Gaikwad, T.D.; Asher, Z.D.; Liu, K.; Huang, M.; Kolmanovsky, I. Vehicle Velocity Prediction and Energy Management Strategy Part 2: Integration of Machine Learning Vehicle Velocity Prediction with Optimal Energy Management to Improve Fuel. SAE Tech. Pap. 2019. [Google Scholar] [CrossRef]
- Liu, K.; Asher, Z.; Gong, X.; Huang, M.; Kolmanovsky, I. Vehicle velocity prediction and energy management strategy part 1: Deterministic and stochastic vehicle velocity prediction using machine learning. SAE Tech. Pap. 2019. [Google Scholar] [CrossRef]
- Olabiyi, O.; Martinson, E.; Chintalapudi, V.; Guo, R. Driver Action Prediction Using Deep (Bidirectional) Recurrent Neural Network. arXiv 2017, arXiv:1706.02257. [Google Scholar]
- Un-Noor, F.; Padmanaban, S.; Mihet-Popa, L.; Mollah, M.N.; Hossain, E. A comprehensive study of key electric vehicle (EV) components, technologies, challenges, impacts, and future direction of development. Energies 2017, 10, 1217. [Google Scholar] [CrossRef]
- Li, Y.; Yang, J.; Song, J. Nano energy system model and nanoscale effect of graphene battery in renewable energy electric vehicle. Renew. Renew. Sustain. Energy Rev. 2017, 69, 652–663. [Google Scholar] [CrossRef]
- Chalk, S.G.; Miller, J.F. Key challenges and recent progress in batteries, fuel cells, and hydrogen storage for clean energy systems. J. Power Sources 2006, 159, 73–80. [Google Scholar] [CrossRef]
- Townsend, A.; Gouws, R. A Comparative Review of Lead-Acid, Lithium-Ion and Ultra-Capacitor Technologies and Their Degradation Mechanisms. Energies 2022, 15, 4930. [Google Scholar] [CrossRef]
- Sorlei, I.-S.; Bizon, N.; Thounthong, P.; Varlam, M.; Carcadea, E.; Culcer, M.; Iliescu, M.; Raceanu, M. Fuel Cell Electric Vehicles—A Brief Review of Current Topologies and Energy Management Strategies. Energies 2021, 14, 252. [Google Scholar] [CrossRef]
- Lee, U.; Jeon, S.; Lee, I. Design for shared autonomous vehicle (SAV) system employing electrified vehicles: Comparison of battery electric vehicles (BEVs) and fuel cell electric vehicles (FCEVs). Clean. Eng. Technol. 2022, 8, 100505. [Google Scholar] [CrossRef]
- Khalaf, P.; Richter, H. Trajectory Optimization of Robots with Regenerative Drive Systems: Numerical and Experimental Results. IEEE Trans. Robot. 2020, 36, 501–516. [Google Scholar] [CrossRef]
- Hydrogen Fuel Cell Car|Toyota Mirai. Available online: https://ssl.toyota.com/mirai/fcv.html (accessed on 13 October 2022).
- Chen, J.; Nguyen, M.-K.; Yao, Z.; Wang, C.; Gao, L.; Hu, G. DC-DC Converters for Transportation Electrification: Topologies, Control, and Future Challenges. IEEE Electrif. Mag. 2021, 9, 10–22. [Google Scholar] [CrossRef]
- Yao, L.; Lim, W.H.; Tsai, T.S. A Real-Time Charging Scheme for Demand Response in Electric Vehicle Parking Station. IEEE Trans. Smart Grid 2017, 8, 52–62. [Google Scholar] [CrossRef]
- Hussain, M.T.; Sulaiman, N.B.; Hussain, M.S.; Jabir, M. Optimal Management strategies to solve issues of grid having Electric Vehicles (EV): A review. J. Energy Storage 2021, 33, 102114. [Google Scholar] [CrossRef]
- Ireshika, M.A.S.T.; Rheinberger, K.; Lliuyacc-Blas, R.; Kolhe, M.L.; Preißinger, M.; Kepplinger, P. Optimal power tracking for autonomous demand side management of electric vehicles. Journal of Energy Storage 2022, 52, 104917. [Google Scholar] [CrossRef]
- Nimalsiri, N.; Smith, D.; Ratnam, E.; Mediwaththe, C.; Halgamuge, S. A decentralized electric vehicle charge scheduling scheme for tracking power profiles. In Proceedings of the 2020 IEEE Power & Energy Society Innovative Smart Grid Technologies Conference (ISGT), Washington, DC, USA, 17–20 February 2020; pp. 1–5. [Google Scholar]
- Faessler, B.; Schuler, M.; Preißinger, M.; Kepplinger, P. Battery storage systems as grid-balancing measure in low-voltage distribution grids with distributed generation. Energies 2017, 10, 2161. [Google Scholar] [CrossRef]
- Ireshika, M.A.S.T.; Preissinger, M.; Kepplinger, P. Autonomous demand side management of electric vehicles in a distribution grid. In Proceedings of the 2019 7th International Youth Conference on Energy (IYCE), Bled, Slovenia, 3–6 July 2019; pp. 1–6. [Google Scholar]
- Rheinberger, K.; Kepplinger, P.; Preißinger, M. Flexibility control in autonomous demand response by optimal power tracking. Energies 2021, 14, 3568. [Google Scholar] [CrossRef]
- Bhargavi, K.M.; Jayalaksmi, N.S.; Malagi, S.; Jadoun, V.K. Integration of plug-in electric vehicles in smart grid: A review. In Proceedings of the 2020 International Conference on Power Electronics & IoT Applications in Renewable Energy and its Control (PARC), Mathura, India, 28–29 February 2020; pp. 214–219. [Google Scholar]
- Ahmad, A.; Alam, M.S.; Chabaan, R. A Comprehensive Review of Wireless Charging Technologies for Electric Vehicles. IEEE Trans. Transp. Electrif. 2018, 4, 38–63. [Google Scholar] [CrossRef]
- Machura, P.; Li, Q. A critical review on wireless charging for electric vehicles. Renew. Sustain. Energy Rev. 2019, 104, 209–234. [Google Scholar] [CrossRef]
- Townsend, A.; Jiya, I.N.; Martinson, C.; Bessarabov, D.; Gouws, R. A comprehensive review of energy sources for unmanned aerial vehicles, their shortfalls and opportunities for improvements. Heliyon 2020, 6, e05285. [Google Scholar] [CrossRef]
- Thibbotuwawa, A.; Nielsen, P.; Zbigniew, B.; Bocewicz, G. Energy consumption in unmanned aerial vehicles: A review of energy consumption models and their relation to the UAV routing. Adv. Intell. Syst. Comput. 2019, 853, 173–184. [Google Scholar]
- Abeywickrama, H.V.; Jayawickrama, B.A.; He, Y.; Dutkiewicz, E. Comprehensive energy consumption model for unmanned aerial vehicles. IEEE Access 2018, 6, 58383–58394. [Google Scholar] [CrossRef]
- Beigi, P.; Rajabi, M.S.; Aghakhani, S. An Overview of Drone Energy Consumption Factors and Models. arXiv 2022, arXiv:2206.10775. [Google Scholar]
- Aiello, G.; Inguanta, R.; D’angelo, G.; Venticinque, M. Energy Consumption Model of Aerial Urban Logistic Infrastructures. Energies 2021, 14, 5998. [Google Scholar] [CrossRef]
- Zhang, J.; Campbell, J.F.; Sweeney, D.C.; Hupman, A.C. Energy consumption models for delivery drones: A comparison and assessment. Transp. Res. D Transp. Environ. 2021, 90, 102668. [Google Scholar] [CrossRef]
- Rodrigues, T.A.; Patrikar, J.; Oliveira, N.L.; Matthews, H.S.; Scherer, S.; Samaras, C. Drone flight data reveal energy and greenhouse gas emissions savings for very small package delivery. Patterns 2022, 3, 100569. [Google Scholar] [CrossRef]
- Czachórski, T.; Gelenbe, E.; Kuaban, G.S.; Marek, D. Optimizing Energy Usage for an Electric Drone. Commun. Comput. Inf. Sci. 2022, 1596, 61–75. [Google Scholar]
- Shivgan, R.; Dong, Z. Energy-Efficient Drone Coverage Path Planning using Genetic Algorithm. In Proceedings of the 2020 IEEE 21st International Conference on High Performance Switching and Routing (HPSR), Newark, NJ, USA, 11–14 May 2020. [Google Scholar]
- Chen, Y.; Baek, D.; Bocca, A.; Macii, A.; Macii, E.; Poncino, M. A case for a battery-aware model of drone energy consumption. In Proceedings of the 2018 IEEE International Telecommunications Energy Conference (INTELEC), Turino, Italy, 7–11 October 2018. [Google Scholar]
- Farid, G.; Hongwei, M.; Ali, S.M.; Liwei, Q. A Review on Linear and Nonlinear Control Techniques for Position and Attitude Control of A Quadrotor. Mechatron. Syst. Control 2017, 45, 43–57. [Google Scholar]
- Xiong, W.; Guo, B.; Yan, S. Energy consumption optimization of processor scheduling for real-time embedded systems under the constraints of sequential relationship and reliability. Alex. Eng. J. 2022, 61, 73–80. [Google Scholar] [CrossRef]
- Liu, Z.; Hu, C.; Wang, B.; Chen, J.; Deng, S.; Yu, J. A Minimizing Energy Consumption Scheme for Real-Time Embedded System Based on Meta-heuristic Optimization. IEEE Trans. Comput.-Aided Des. Integr. Circuits Syst. 2022, 42, 2276–2289. [Google Scholar] [CrossRef]
- Varshika, M.L.; Balaji, A.; Corradi, F.; Das, A.; Stuijt, J.; Catthoor, F. Design of many-core big little µBrains for energy-efficient embedded neuromorphic computing. In Proceedings of the 2022 Design, Automation & Test in Europe Conference & Exhibition (DATE), Antwerp, Belgium, 14–23 March 2022. [Google Scholar]
- Reza, S.M.; Hakem, B. An Energy-and Reliability-Aware Task Scheduling in Real-Time MPSoC Systems. J. Circuits, Syst. Comput. 2022, 13, 2250225. [Google Scholar]
- Gudaparthi, S.; Shrestha, R. Selective register-file cache: An energy saving technique for embedded processor architecture. Des. Autom. Embed. Syst. 2022, 26, 105–124. [Google Scholar] [CrossRef]
- Yu, Z.; Machado, P.; Zahid, A.; Abdulghani, A.M.; Dashtipour, K.; Heidari, H.; Imran, M.A.; Abbasi, Q.H. Energy and performance trade-off optimization in heterogeneous computing via reinforcement learning. Electronics 2020, 9, 1812. [Google Scholar] [CrossRef]
- Xu, Y.; Khalilzadeh, M. An approach for managing the Internet of things’ resources to optimize the energy consumption using a nature-inspired optimization algorithm and Markov model. Sustain. Comput. Inform. Syst. 2022, 36, 100817. [Google Scholar] [CrossRef]
Figure 1.
General block diagram of industrial robotic processes.

Figure 2.
Autonomous vehicles components.

Figure 3.
General notation of eco-driving system.

Figure 4.
Drone power sources with different types of material.

Figure 5.
Drone body components.

Figure 6.
Relation between the drone modules.

Figure 7.
Comparison between DAG-QPSO-I and DAG-QPSO-II.


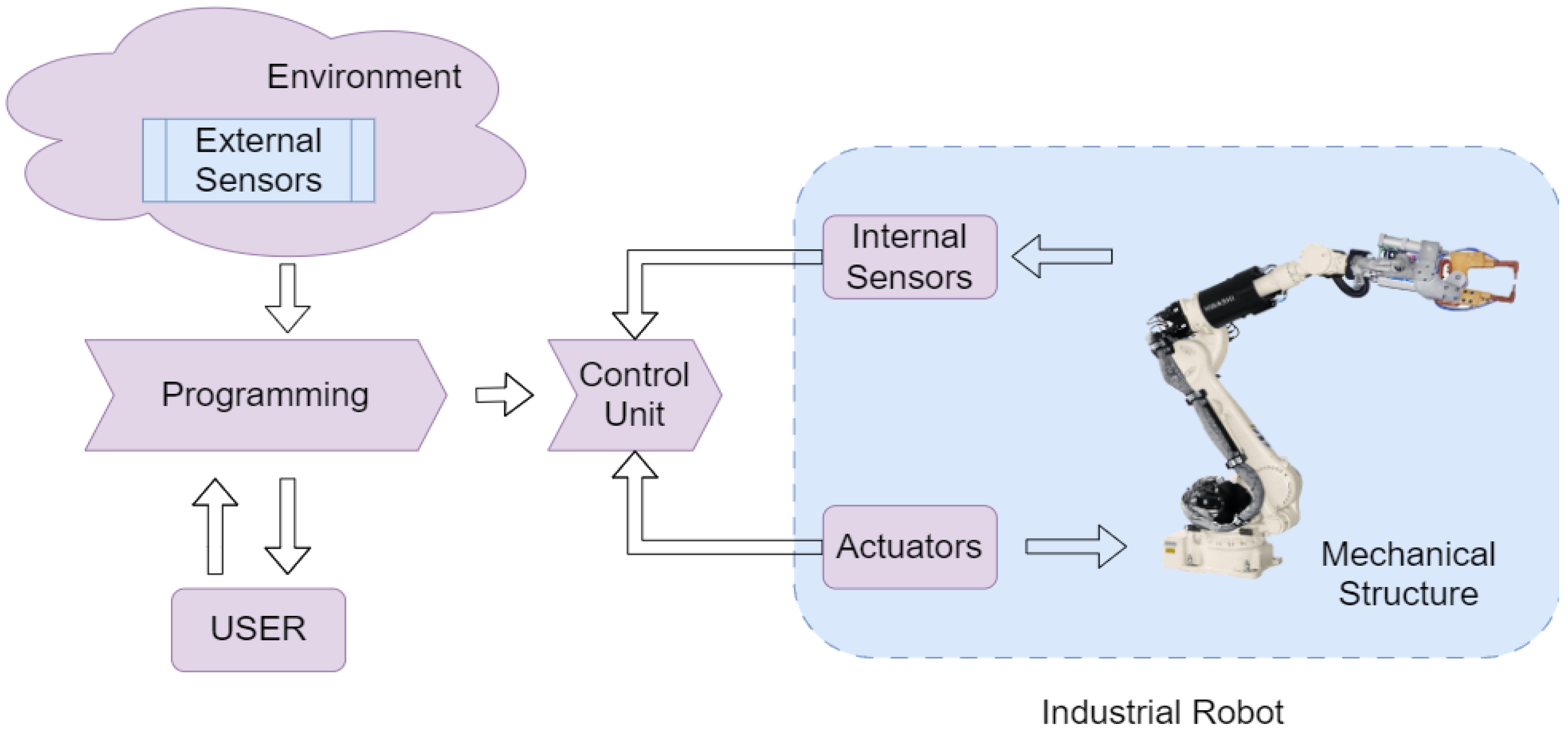{kind=link}
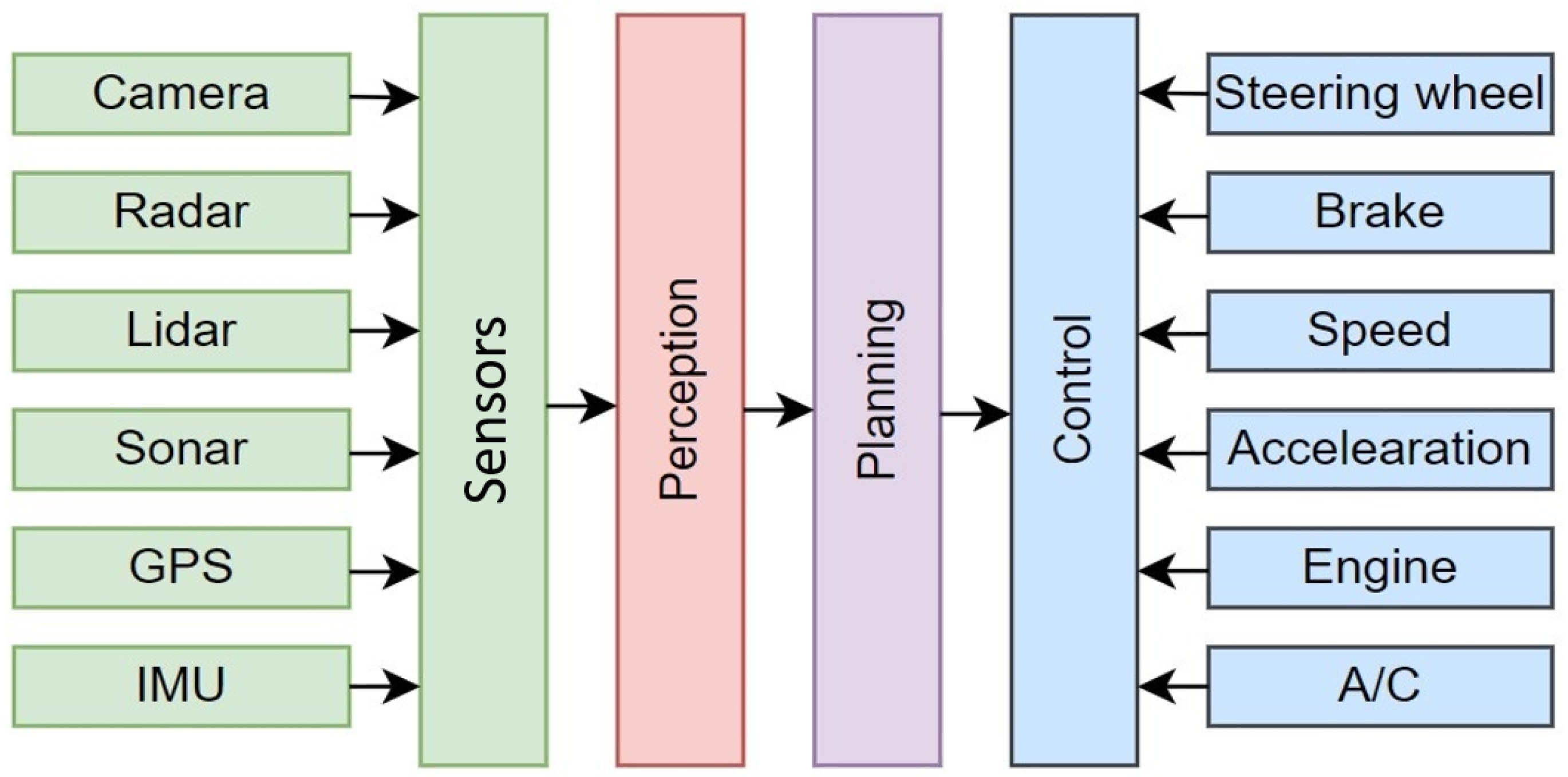{kind=link}
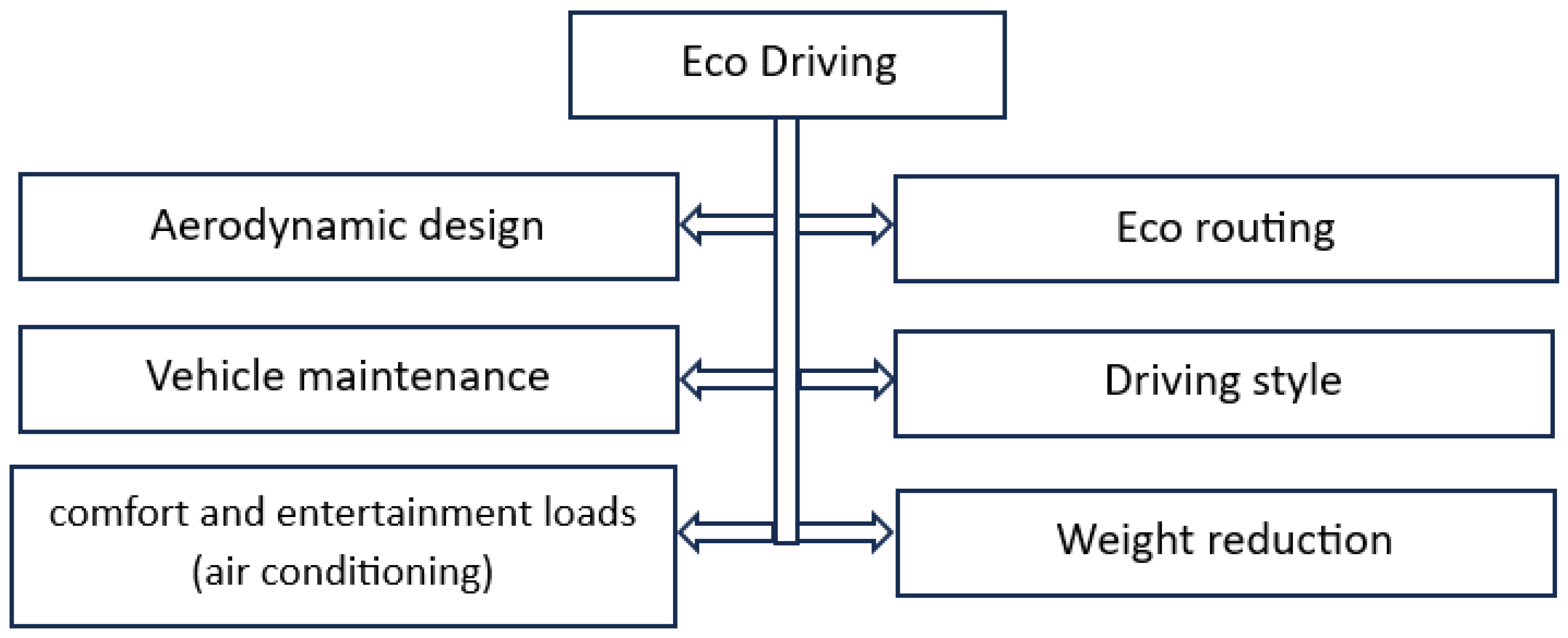{kind=link}
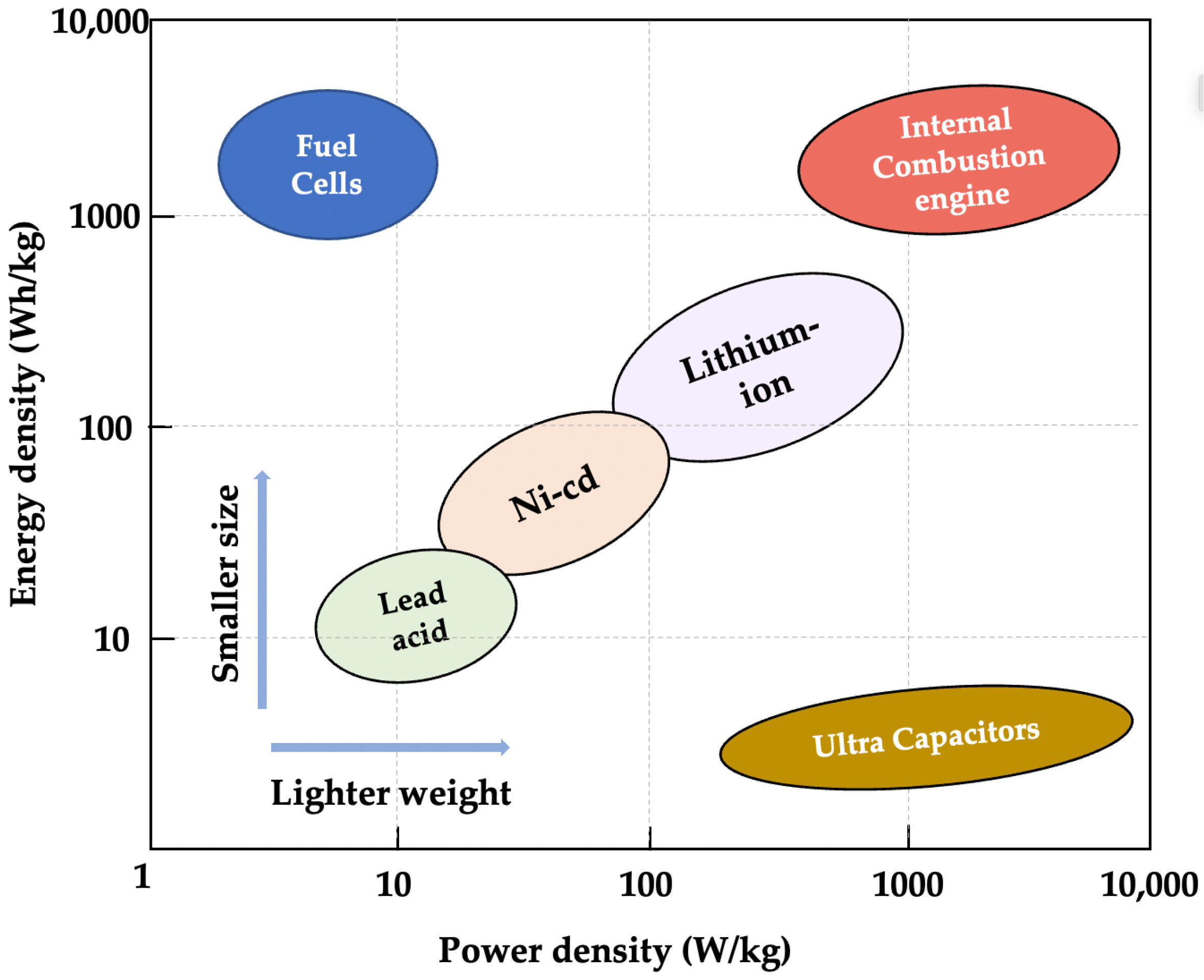{kind=link}
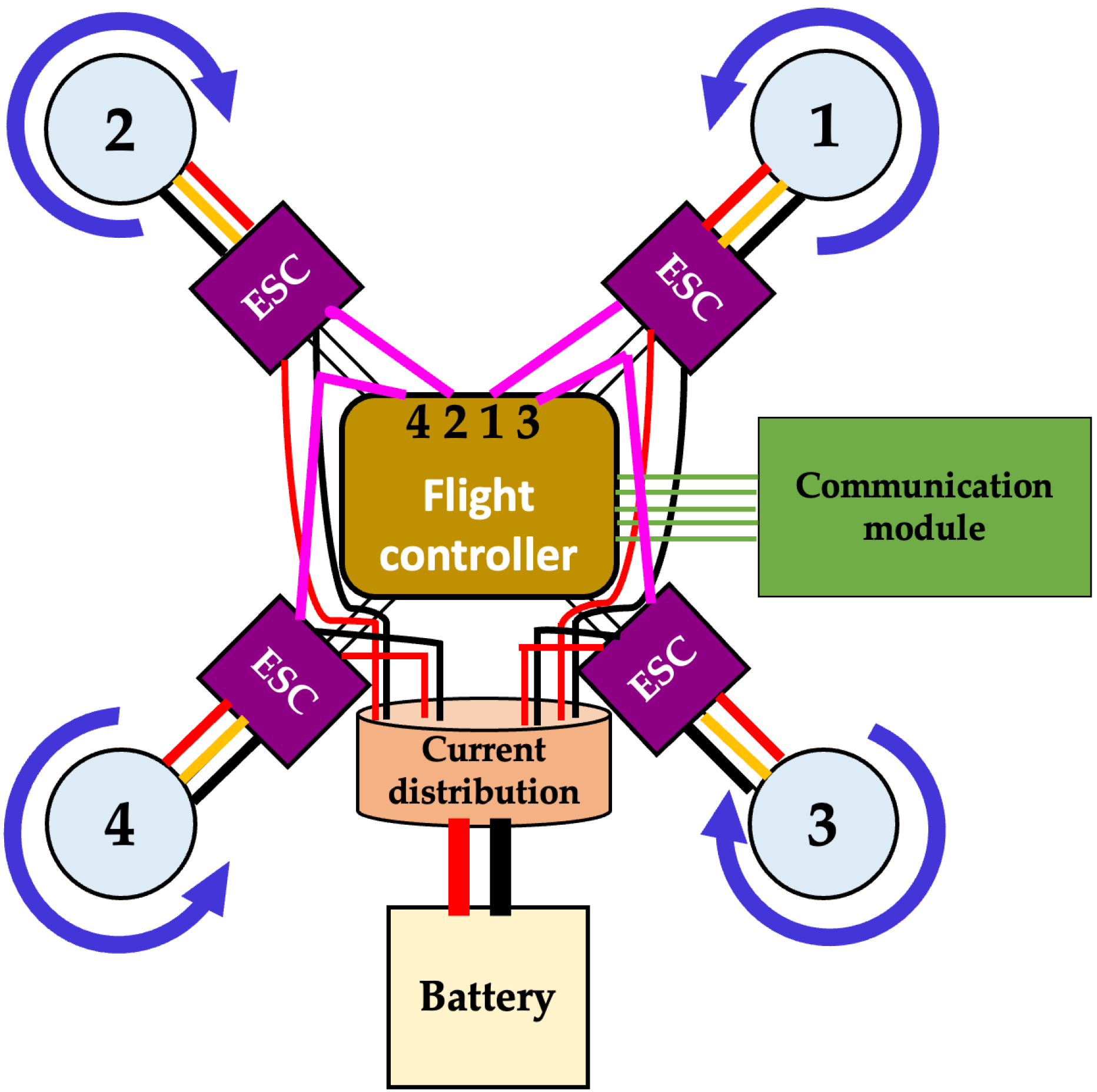{kind=link}
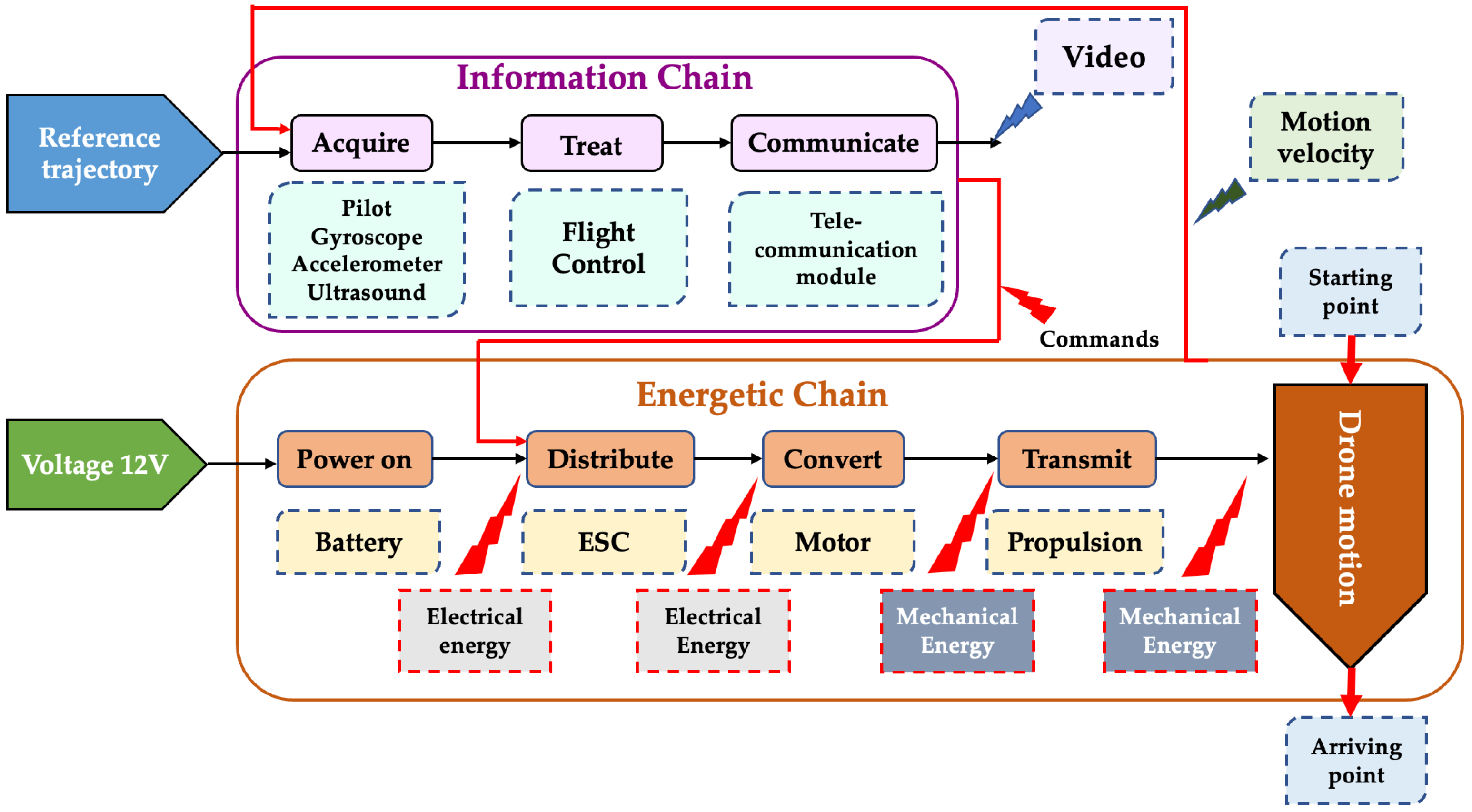{kind=link}
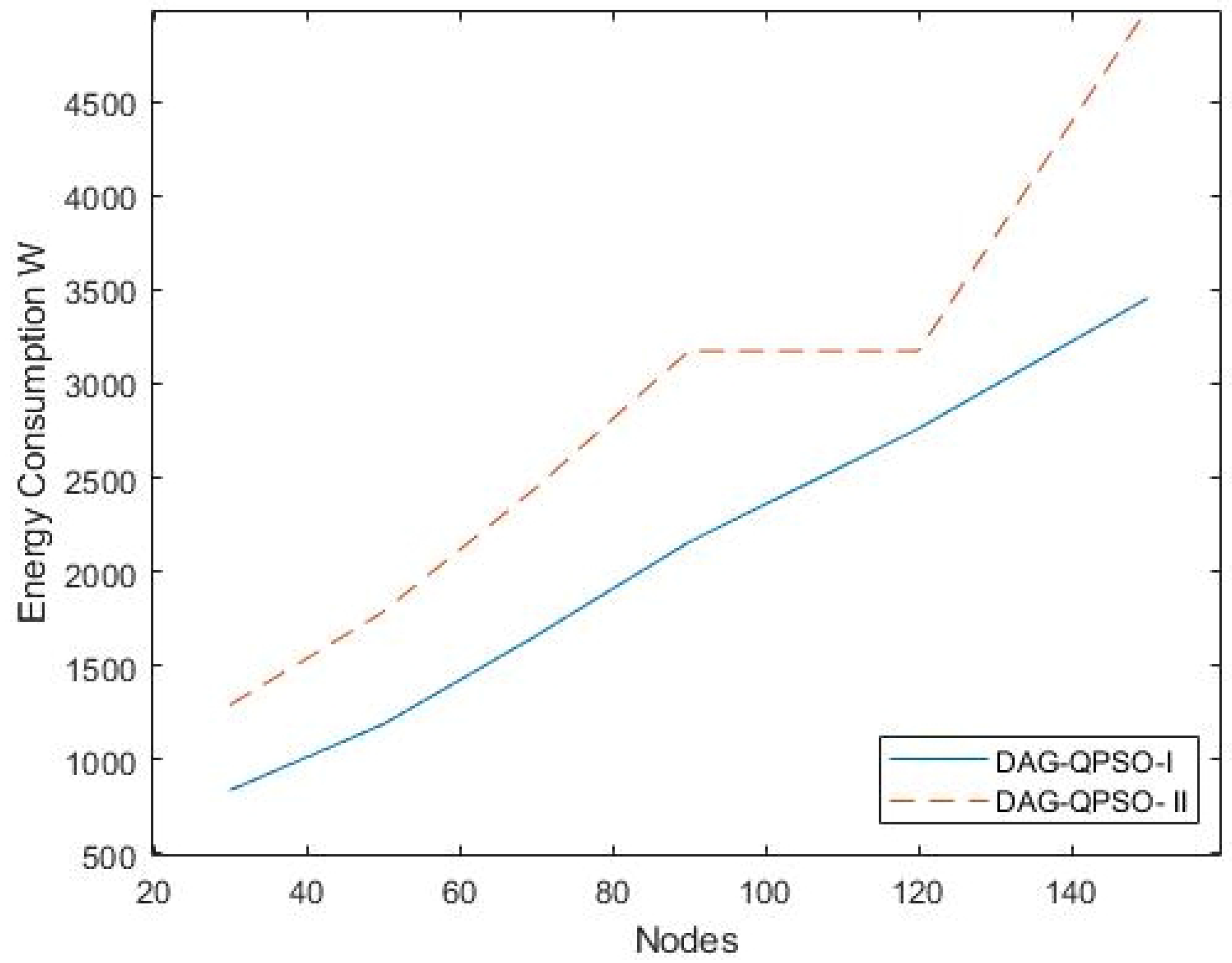{kind=link}
Table 1.
Summary of the keyword search results.
| Energy Problems | Energy Optimization | Energy Performance | |
|---|---|---|---|
| items hit | items hit | items hit | |
| Google Scholar | 566,000 | 5,400,000 | 6,670,000 |
| IEEE Xplore | 117,904 | 49,803 | 188,522 |
| Web of Science | 69,564 | 14,514 | 23,097 |
| Science Direct | 807,094 | 773,260 | 1,000,000+ |
Table 2.
Table summary of the study problems and the solution in this section.
| REF | Problem or Target | Optimization Method | Optimization Rate % |
|---|---|---|---|
| [6] 2020 | Computational complexity | Recursive Newton–Euler Algorithm (RNEA) | - |
| [7] 2018 | Decreasing power consumption in industrial robotic systems | High power consumption in industrial robotic systems | 40 |
| [8] 2019 | The optimal path problem of a two-node robotic arm in a moving obstacles environment | Converting the original optimization problem into a quadratic programming problem with equality and inequality constraints | - |
| [9] 2021 | Reducing the power consumption of robot stations | Optimal operation time and ordering the robot movements | 12 |
| [10] 2021 | Optimizing energy consumption in process-level industrial robots | Statistical analysis of operating parameters (speed, acceleration, payload, and temperature) | - |
| [11] 2018 | Optimizing power consumption in palletizing robots | Path optimization for the joint driving system based on Fourier series approximation and genetic algorithm | 13.1 |
| [12] 2022 | The instability of the initial path parameters | Combining differential evolution algorithm with analytical model | 16 |
| [13] 2020 | Decreasing the energy consumption of repetitive task robotic systems | Incorporating robotic system with energy storing and recovering devices | 77.8 |
| [14] 2023 | The optimal planning of robot trajectory | A nonlinear optimization-based sequential quadratic programming | 13.95 |
| [15] 2020 | Minimizing the execution time and energy consumption of a dual-arm robot joint placement and motion planning | Meta-heuristic algorithms | 18 |
| [16] 2022 | Predicting the energy consumption of industrial robots | End-effector’s motion trajectory and action mode | - |
Table 3.
Table summary of the energy consumption enhancement in embedded systems.
| REF | Problem or Target | Optimization Method |
|---|---|---|
| [66] 2022 | Optimizing power efficiency in real-time embedded systems that consist of multiple processors | Development two algorithms DAG_QPSO_I and II |
| [67] 2022 | Allocating the processing frequencies to a set of periodic real-time functions and minimizes total energy usage | ADWSOA |
| [68] 2022 | Enhancing power efficiency in embedded systems for deep learning applications by integrating neuromorphic accelerators called μBrain | Spiking Deep Conventional Neural Networks (SDCNNs) |
| [69] 2022 | Achieving reliability and optimal energy consumption in Real-Time MPSoC | Determining Safe Processor Speed Range Calculating Appropriate Processor Speeds Optimizing Task Mapping Energy Consumption Reduction (11–42%) High Reliability 97% |
| [70] 2022 | Improve the efficiency of read and write operations to the register file by selectively caching actively reused and short-lived operands. |
|
| [71] 2020 | decreased performance efficiency caused by decreasing power consumption | Power Measurement Utility for Reinforcement Learning (PMU-RL) technique |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Vásárhelyi, J.; Salih, O.M.; Rostum, H.M.; Benotsname, R. An Overview of Energies Problems in Robotic Systems. Energies 2023, 16, 8060. https://doi.org/10.3390/en16248060
AMA Style
Vásárhelyi J, Salih OM, Rostum HM, Benotsname R. An Overview of Energies Problems in Robotic Systems. Energies. 2023; 16(24):8060. https://doi.org/10.3390/en16248060
Chicago/Turabian StyleVásárhelyi, József, Omar M. Salih, Hussam Mahmod Rostum, and Rabab Benotsname. 2023. "An Overview of Energies Problems in Robotic Systems" Energies 16, no. 24: 8060. https://doi.org/10.3390/en16248060
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.