



State-of-the-Art Grid Stability Improvement Techniques for Electric Vehicle Fast-Charging Stations for Future Outlooks
 , , ,
, , ,
Abstract
:1. Introduction
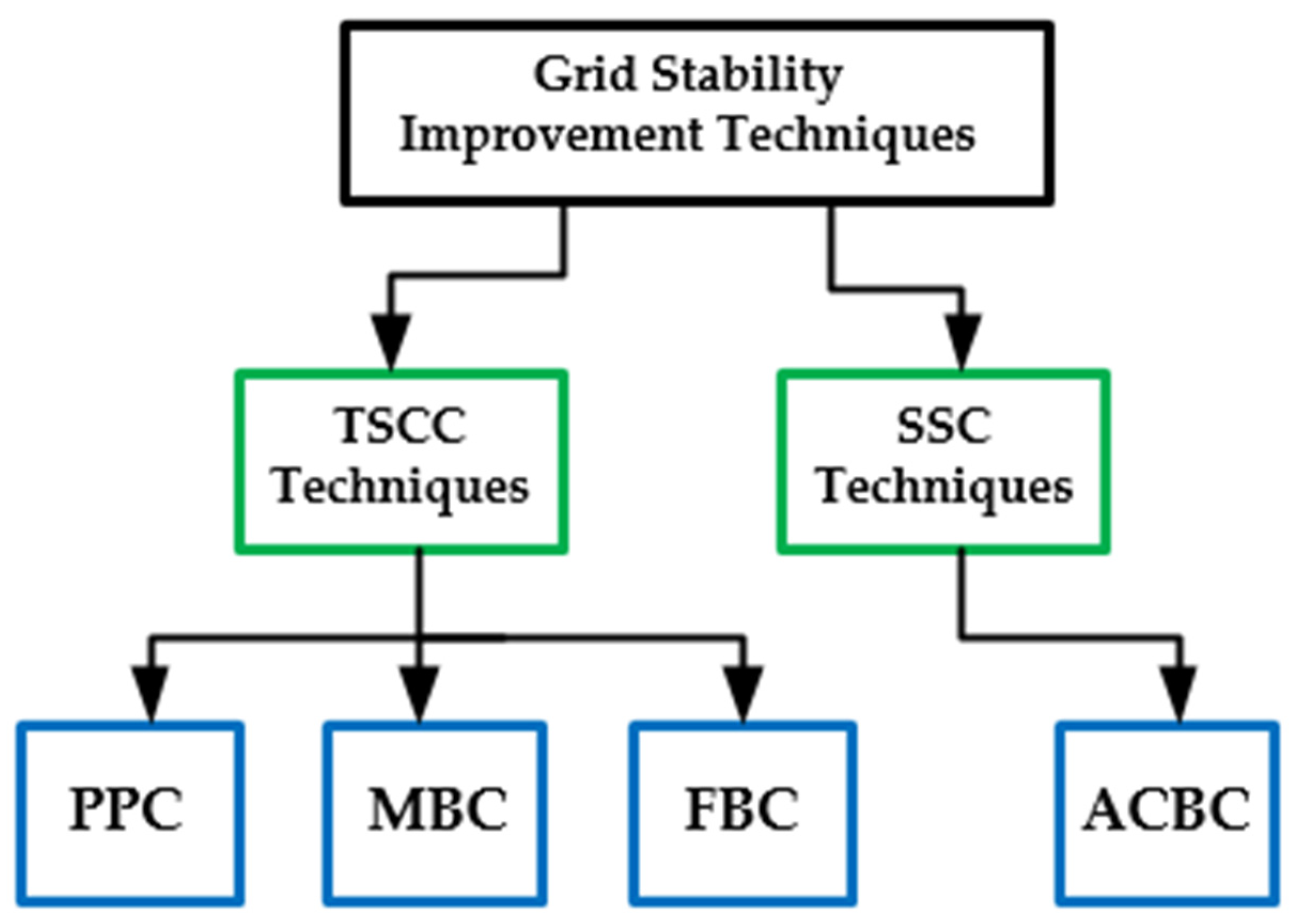
2. TSCC Grid Stability Improvement Techniques
2.1. Partial Power Control (PPC) Technique
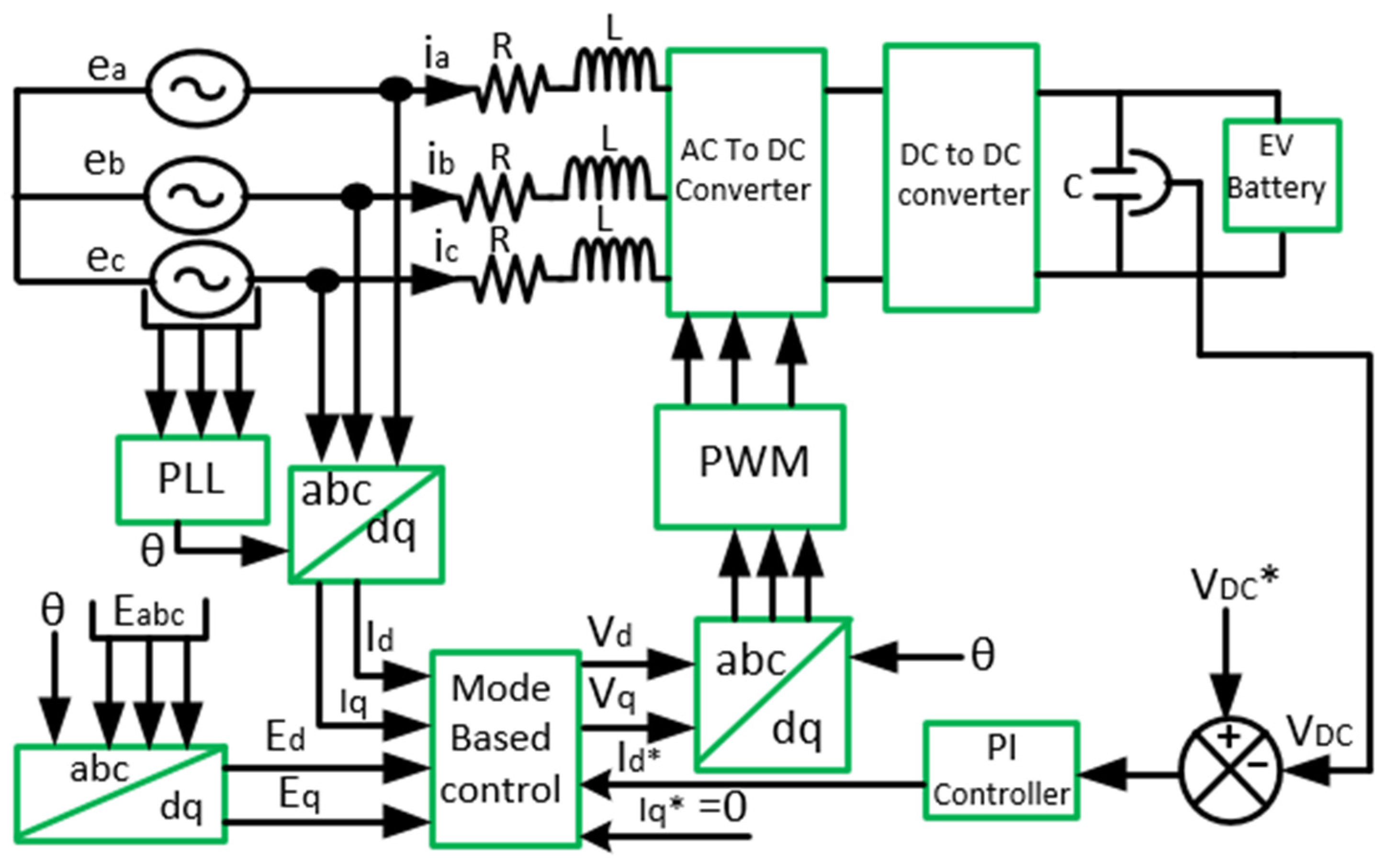
2.2. Mode-Based Control (MBC) Technique
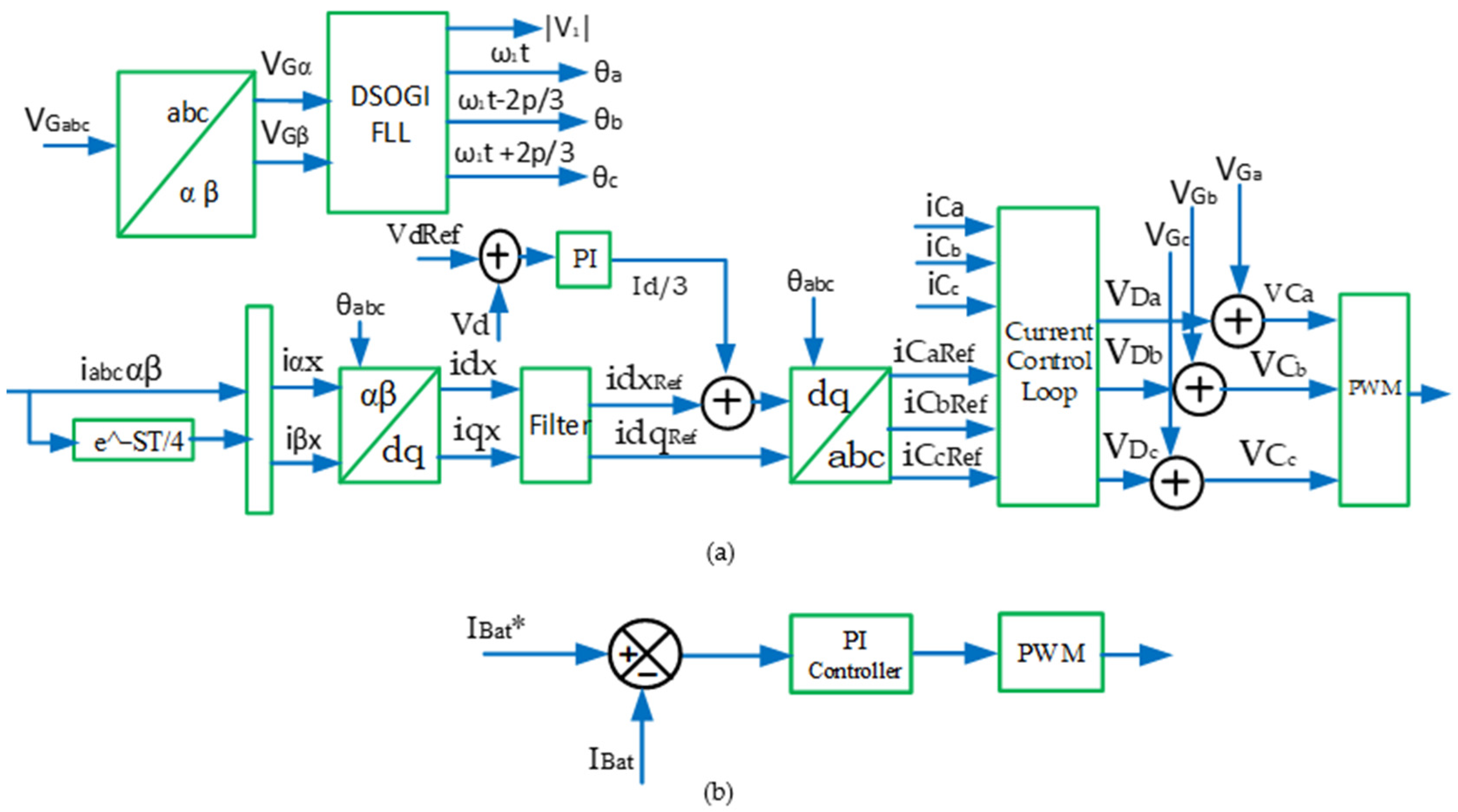
2.3. Filter-Based Control (FCB) Technique
2.4. Summary of the Most Recent State-of-the-Art Achievements in TSCC Strategy
3. SSC Grid Stability Improvement Techniques
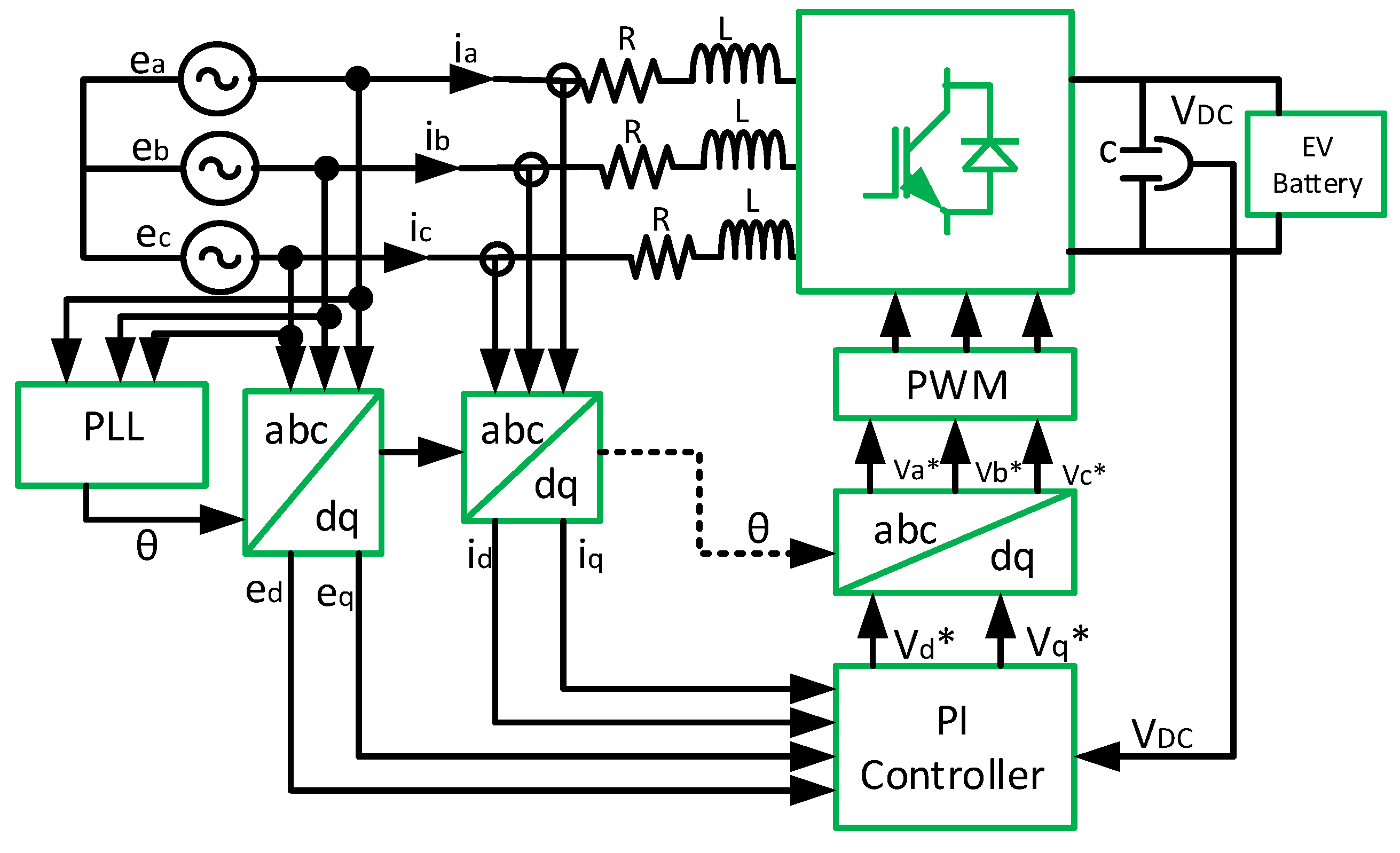
3.1. Alternating-Current-Based Control (ACBC) Technique
3.2. Summary of the Most Recent State-of-the-Art Achievements in SSC Strategy
4. Issues with TSCC Techniques for Rectifier Control for FCS Stability
4.1. Issues with PPC Technique
4.2. Issues with the MBC Technique
4.3. Issues with FBC Technique
5. Issues with SSC Control Techniques for Rectifier Control for FCS Stability
5.1. Issues with the ACBC Technique
5.2. Performance Evaluation of TSCC and SSC Control Techniques
- Transient switching issues and slow controller dynamic responses during multiple FCS operations;
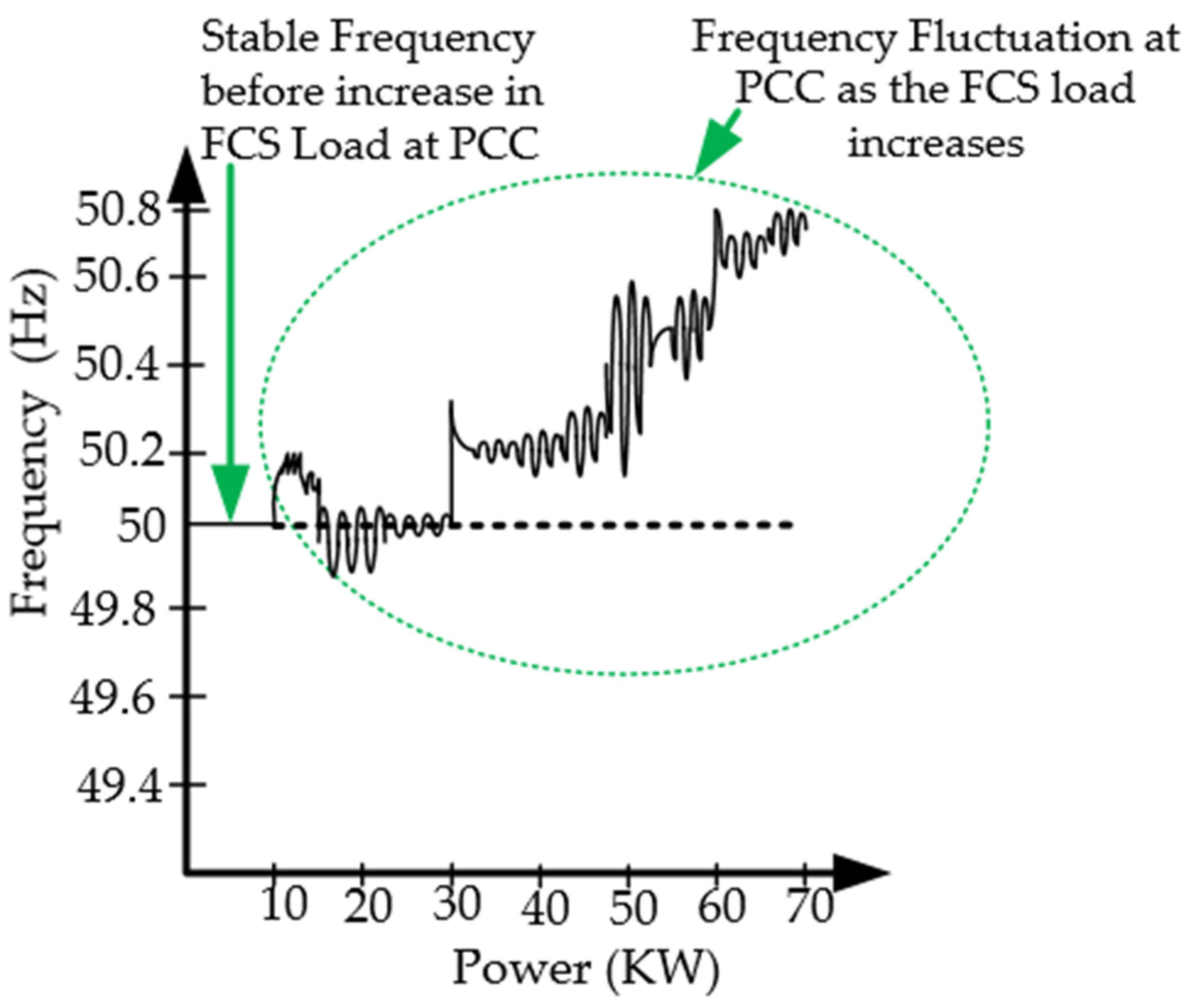
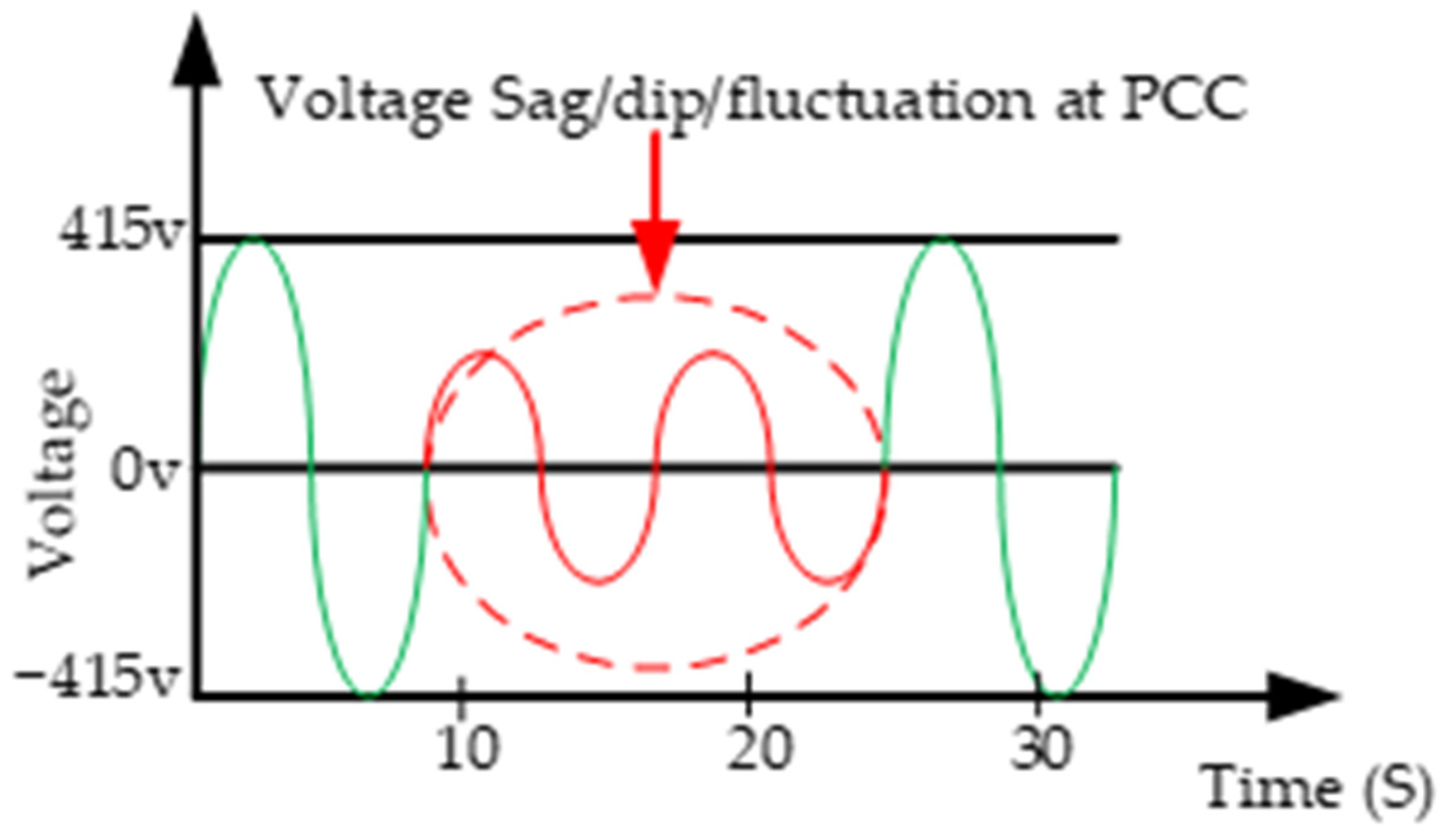
- Power exchange instability and frequency fluctuation issues during multiple FCS operations at the PCC;
- Negative incremental impedance at constant EV loads and harmonic distortion losses at a higher FCS capacity of above 50 kW at the PCC.
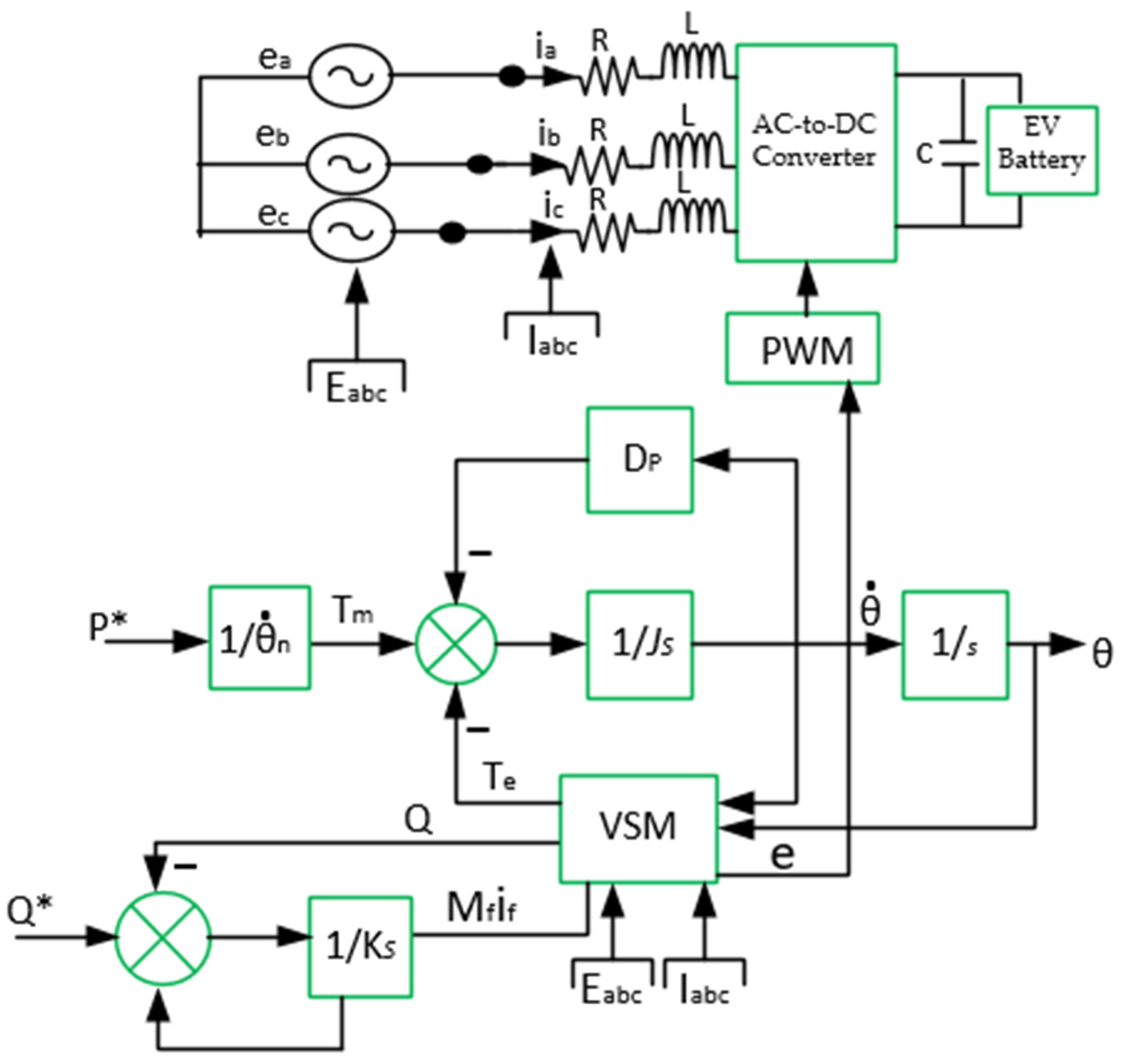
6. Concept of Virtual Synchronous Machine-Based State of Charge Feedback Control
- A droop-based technique with the SOC feedback strategy for adaptable EV battery charge and discharge limit conditions;
- An adaptation to the system inertia for the active power and reactive power decoupling strategy for any transient changes in grid frequency, voltage, and power regulation at the PCC for a higher-rated FCS capacity of above 50 kW at the PCC;
- Adaptability to the strategy of the SOC instantaneous functioning state of the EV battery to aid in the controller’s fast, dynamic and transient response under multiple FCS operations.
7. Future Studies and Development
- An artificial-intelligence-based VSM controller with harmonic impedance compensation for inertial and load profile adaptability to the EV FCS charging condition;
- A neural-network-based VSM controller with the amplitude compensation strategy for inertia improvement and for the management of the EV battery discharge condition.
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mogos, A.S.; Grillo, S. Impact of EV Charging Stations in Power Grids in Italy and Its Mitigation Mechanisms. In Proceedings of the 21st IEEE International Conference on Environment and Electrical Engineering and 2021 5th IEEE Industrial and Commercial Power System Europe, Bari, Italy, 7–10 September 2021. [Google Scholar] [CrossRef]
- Chaudhary, V.K. Deployment Impact of Electric Vehicle Charging Stations on Radial Distribution System. In Proceedings of the IEEE 9th Uttar Pradesh Section International Conference on Electrical, Electronics and Computer Engineering, Allahabad, India, 2–4 December 2022. [Google Scholar]
- Cai, S.; Kirtley, J.L.; Lee, C.H.T. Critical Review of Direct-Drive Electrical Machine Systems for Electric and Hybrid Electric Vehicles. IEEE Trans. Energy Convers. 2022, 37, 2657–2668. [Google Scholar] [CrossRef]
- Camurca, L.; Pereira, T.; Hoffmann, F.; Liserre, M. Analysis, Limitations and Opportunities of Modular Multilevel Converter-Based Architectures in Fast Charging Station Infrastructure. IEEE Trans. Power Electron. 2022, 37, 10747–10760. [Google Scholar] [CrossRef]
- Almeida, M.; Chaves, M.; Morgado, S.; Louro, M. Effects of EV Ultra-Fast Chargers in Power Quality. In Proceedings of the 2022 CIRED Workshop on E-Mobility and Power Distribution Systems, Porto, Portugal, 2–3 June 2022. [Google Scholar]
- Nazih, Y.; Abdel-moneim, M.G. A Ring-Connected Dual Active Bridge Based DC-DC Multiport Converter for EV Fast-Charging Stations. IEEE Access 2022, 10, 52052–52066. [Google Scholar] [CrossRef]
- Habib, H.U.R.; Waqar, A.; Hussien, M.G.; Junejo, A.K.; Jahangiri, M.; Imran, R.M.; Kim, Y.S.; Kim, J.H. Analysis of Microgrid’s Operation Integrated to Renewable Energy and Electric Vehicles in View of Multiple Demand Response Programs. IEEE Access 2022, 10, 7598–7638. [Google Scholar] [CrossRef]
- Arias, N.B.; Hashemi, S. Electric Vehicles: Recent Status, Challenges, and Future Prospects. IEEE Trans. Intell. Transp. Syst. 2019, 20, 1–20. [Google Scholar]
- Safayatullah, M.; Elrais, M.T.; Ghosh, S.; Rezaii, R.; Batarseh, I. A Comprehensive Review of Power Converter Topologies and Control Methods for Electric Vehicle Fast Charging Applications. IEEE Access 2022, 10, 40753–40793. [Google Scholar] [CrossRef]
- Sahoo, G.K. Recent Trends and Topology of Electric Vehicle Charging through DC Microgrid. In Proceedings of the 2022 IEEE Delhi Section Conference, New Delhi, India, 11–13 February 2022. [Google Scholar]
- El Bakkari, F.; Mounir, H.; El Marjani, A. Electric Vehicle Progress and Challenges on the Road to Sustainable Transportation. In Proceedings of the 2021 International Renewable and Sustainable Energy Conference, Tetouan, Morocco, 23–27 November 2021. [Google Scholar] [CrossRef]
- Zulkifli, S.A.; Momoh, K. Grid Stability Improvement for Charging Stations of EV Battery During V2G. IEEE Smart Grid Bull. Compend. 2022, 18–19. [Google Scholar]
- Mahfouz, M.M.; Iravani, R. Autonomous Operation of the DC Fast-Charging Station. IEEE Trans. Ind. Electron. 2022, 69, 3787–3797. [Google Scholar] [CrossRef]
- Aretxabaleta, I.; Alegría, I.M.D.E.; Andreu, J.O.N. High-Voltage Stations for Electric Vehicle Fast-Charging: Trends, Standards, Charging Modes and Comparison of Unity Power-Factor Rectifiers. IEEE Access 2021, 9, 102177–102194. [Google Scholar] [CrossRef]
- Karmaker, A.K.; Hossain, A.; Pota, H.R.; Onen, A. Energy Management System for Hybrid Renewable Energy-Based Electric Vehicle Charging Station. IEEE Access 2023, 11, 27793–27805. [Google Scholar] [CrossRef]
- Salama, H.S.; Said, S.M.; Vokony, I.; Hartmann, B. Adaptive Coordination Strategy Based on Fuzzy Control for Electric Vehicles and Superconducting Magnetic Energy Storage—Towards Reliably Operating Utility Grids. IEEE Access 2021, 9, 61662–61670. [Google Scholar] [CrossRef]
- Tu, H.; Feng, H.; Srdic, S.; Lukic, S. Extreme Fast Charging of Electric Vehicles: A Technology Overview. IEEE Trans. Transp. Electrif. 2019, 5, 861–878. [Google Scholar] [CrossRef]
- Shafiq, S.; Bin Irshad, U.; Al-Muhaini, M.; Djokic, S.Z.; Akram, U. Reliability Evaluation of Composite Power Systems: Evaluating the Impact of Full and Plug-in Hybrid Electric Vehicles. IEEE Access 2020, 8, 114305–114314. [Google Scholar] [CrossRef]
- Hoach, N.; Al-Sumaiti, A.S.; Al-Hosani, K.; Al-Jaafari, K.A.; El-Moursi, M.S.; Ji-Byon, Y.; Al-Sawalhi, J.Y. Enhanced Performance of Charging Stations via Converter Control under Unbalanced and Harmonic Distorted Grids. IEEE Trans. Power Deliv. 2021, 36, 3964–3976. [Google Scholar] [CrossRef]
- Blinov, A.; Zinchenko, D.; Rabkowski, J.; Wrona, G.; Vinnikov, D. Quasi Single-Stage Three-Phase Filterless Converter for EV Charging Applications. IEEE Open J. Power Electron. 2021, 3, 51–60. [Google Scholar] [CrossRef]
- Cortes, P.; Vancu, M.F.; Kolar, J.W. Swiss Rectifier Output Voltage Control with Inner Loop Power Flow Programming (PFP). In Proceedings of the 2013 IEEE 14th Workshop on Control and Modeling for Power Electronics, Salt Lake City, UT, USA, 23–26 June 2013. [Google Scholar] [CrossRef]
- Zhang, D.; Lin, H.; Zhang, Q.; Kang, S.; Lu, Z. Analysis, Design, and Implementation of a Single-Stage Multipulse Flexible-Topology Thyristor Rectifier for Battery Charging in Electric Vehicles. IEEE Trans. Energy Convers. 2019, 34, 47–57. [Google Scholar] [CrossRef]
- Iyer, V.M.; Gulur, S.; Gohil, G.; Bhattacharya, S. An approach towards extreme fast charging station power delivery for electric vehicles with partial power processing. IEEE Trans. Ind. Electron. 2020, 67, 8076–8087. [Google Scholar] [CrossRef]
- Paul, S. Deadbeat Control of Linear and Non Linear System using Signal Correction Technique. MAYFEB J. Electr. Comput. Eng. 2017, 2, 1–23. [Google Scholar]
- Anzola, J.; Aizpuru, I.; Arruti, A. Non-Isolated Partial Power Converter for Electric Vehicle Fast Charging Stations. In Proceedings of the 2020 IEEE 11th International Symposium on Power Electronics for Distributed Generation Systems, Dubrovnik, Croatia, 28 September–1 October 2020. [Google Scholar] [CrossRef]
- Ahmed, I.; Rehan, M.; Basit, A.; Tufail, M.; Hong, K. A Dynamic Optimal Scheduling Strategy for Multi-Charging Scenarios of Plug-in-Electric Vehicles over a Smart Grid. IEEE Access 2023, 11, 28992–29008. [Google Scholar] [CrossRef]
- Abdelrahim, A.; Smailes, M.; Ahmed, K.H.; Member, S.; Mckeever, P. New Fault Detection Algorithm for an Improved Dual VSM Control Structure With FRT Capability. IEEE Access 2021, 9, 125134–125150. [Google Scholar] [CrossRef]
- Sehimi, Y.; Sakly, J.; Almaksour, K.; Robyns, B. A Novel Fast Charger Architecture with Reduced Impact on Distribution Grids Based on V2V Power Transfer. In Proceedings of the 2021 IEEE Vehicle Power and Propulsion Conference, Gijon, Spain, 25 October–14 November 2021. [Google Scholar] [CrossRef]
- Zulkifli, S.A. Electric Vehicle Charging Station: Cause and Solution to Grid System. IEEE Smart Grid Bull. Compend. 2019, 5–7. [Google Scholar]
- Basit, A.; Ahmad, T.; Ali, A.Y.; Ullah, K.; Mufti, G.; Hansen, A.D. Flexible modern power system: Real-time power balancing through load and wind power. Energies 2019, 12, 1710. [Google Scholar] [CrossRef]
- Husain, I.; Islam, M.S.; Gurpinar, E.; Yu, W.; Xue, L.; Sahu, R. Electric Drive Technology Trends, Challenges, and Opportunities for Future Electric Vehicles. Proc. IEEE 2021, 109, 1039–1059. [Google Scholar] [CrossRef]
- Boonraksa, T.; Paudel, A.; Dawan, P.; Marungsri, B. Impact of Electric Bus Charging on the Power Distribution System a Case Study IEEE 33 Bus Test System. In Proceedings of the 2019 IEEE Grand International Conference and Exposition Asia, Bangkok, Thailand, 19–23 March 2019; pp. 819–823. [Google Scholar] [CrossRef]
- Hong, Y.J.; Jeong, Y.W.; Chung, C.C. Grid voltage modulated direct power control for output smoothing in battery energy storage systems. In Proceedings of the 2020 International Conference on Control, Automation and Systems, Busan, Republic of Korea, 13–16 October 2020; pp. 335–338. [Google Scholar] [CrossRef]
- Hattam, L.; Greetham, D.V.; Haben, S.; Roberts, D. Electric vehicles and low-voltage Grid: Impact of uncontrolled demand side response. In Proceedings of the 2017 24th International Conference & Exhibition on Electricity Distribution, Glasgow, UK, 12–15 June 2017. [Google Scholar] [CrossRef]
- Syed, J.J.; Nasi, A.; Jamian, R. Harmonic Distortion Improvement Considering Bulk Charging Station and Distributed Generation. In Proceedings of the 2020 IEEE International Conference on Power and Energy, Penang, Malaysia, 7–8 December 2020. [Google Scholar]
- Bhaskar, M.S.; Ramachandadaramurthy, V.K.; Padmanaban, S.; Blaabjrg, F.; Ionel, D.M.; Almakhles, D. Survey of DC-DC non-isolated topologies for unidirectional power flow in fuel cell vehicles. IEEE Access 2020, 8, 178130–178166. [Google Scholar] [CrossRef]
- Trimboli, M.S.; De Souza, A.K.; Xavier, M.A. Stability and Control Analysis for Series-Input/Parallel-Output Cell Balancing System for Electric Vehicle Battery Packs. IEEE Control Syst. Lett. 2022, 6, 1388–1393. [Google Scholar] [CrossRef]
- Aswathi, C.P.; Lakshmiprabha, K.E. An improved full bridge DC-DC converter for electric vehicles. Int. J. Technol. Eng. Syst. 2014, 6, 89–94. [Google Scholar]
- Chinta, N.K. Comparison of PI and AI Controllers used For Dc-Dc Converter for EV Fast Charging. J. Crit. Rev. 2020, 7, 1290–1298. [Google Scholar] [CrossRef]
- Lipu, M.S.H.; Faisal, M.; Ansari, S.; Hannan, M.A.; Karim, T.F.; Ayob, A.; Hussain, A.; Miah, M.S.; Saad, M.H.M. Review of electric vehicle converter configurations, control schemes and optimizations: Challenges and suggestions. Electronics 2021, 10, 477. [Google Scholar] [CrossRef]
- Wang, N.; Wang, C.; Niu, Y.; Yang, M.; Yu, Y. A Two-Stage Charging Facilities Planning Method for Electric Vehicle Sharing Systems. IEEE Trans. Ind. Appl. 2021, 57, 149–157. [Google Scholar] [CrossRef]
- Peng, L.; Ma, L.; Song, W.; Liu, H. Reference-input-based imaginary axis current estimation method for DQ control strategy of single-phase PWM converters. CSEE J. Power Energy Syst. 2022, 2, 1–9. [Google Scholar] [CrossRef]
- Mnider, A.M.; Atkinson, D.J.; Dahidah, M.; Armstrong, M. A simplified DQ controller for single-phase grid-connected PV inverters. In Proceedings of the 2016 7th International Renewable Energy Congress, Hammamet, Tunisia, 22–24 March 2016. [Google Scholar] [CrossRef]
- Shao, C.; Qian, T.; Wang, Y.; Wang, X. Coordinated Planning of Extreme Fast Charging Stations and Power Distribution Networks Considering On-Site Storage. IEEE Trans. Intell. Transp. Syst. 2021, 22, 493–504. [Google Scholar] [CrossRef]
- Sundararaman, K.; Alagappan, P.; Elavarasu, R. Partial processing converters for charging electric vehicles. In Proceedings of the 2021 1st International Conference on Advances in Electrical, Computing, Communications and Sustainable Technologies, Bhilaj, India, 19–20 February 2021. [Google Scholar] [CrossRef]
- Anzola, J.; Aizpuru, I.; Arruti, A.; Alacano, A.; Artal-Sevil, J.S.; Lopez, R.; Bernal-Ruiz, C. Partial power processing-based charging unit for electric vehicle extreme fast charging stations. In Proceedings of the 2020 IEEE Vehicle Power and Propulsion Conference, Gijon, Spain, 26–29 October 2020. [Google Scholar] [CrossRef]
- Artal-Sevil, J.S.; Bernal-Ruiz, C.; Bono-Nuez, A. Partial Power Processing architecture applied to a Battery Energy Storage System. In Proceedings of the 2020 IEEE Vehicle Power and Propulsion Conference, Gijon, Spain, 18 November–16 December 2020. [Google Scholar] [CrossRef]
- Suresh, K.; Bharatija, C.; Chellammal, N.; Tarq, M.; Chakrabortty, R.K.; Ryam, M.J.; Alamri, B. A Multifunctional Non-Isolated Dual Input-Dual Output Converter for Electric Vehicle Applications. IEEE Access 2021, 9, 64445–64460. [Google Scholar] [CrossRef]
- Sivaraman, P.; Logeswaran, T.; Sakthi Surya Raj, J.S.; Boopathimanikandan, S. Design and Analysis of Sliding Mode Control for Battery Charging Applications. In Proceedings of the 2020 IOP Conference Series: Materials Science and Engineering, Ulaanbaatar, Mongolia, 10–13 September 2020. [Google Scholar] [CrossRef]
- Choi, S.; Oh, S.; Kim, M.; Lee, I.; Lee, J. Interleaved Isolated Single-Phase PFC Converter Module for Three-Phase EV Charger. IEEE Trans. Veh. Technol. 2020, 69, 4957–4967. [Google Scholar] [CrossRef]
- Guerriero, P.; Coppola, M.; Lauria, D.; Daliento, S. PWM based sliding mode control of a fast charger for supercapacitors. In Proceedings of the 2020 International Symposium on Power Electronics, Electrical Drives, Automation and Motion, Sorrento, Italy, 24–26 June 2020. [Google Scholar] [CrossRef]
- Drobnic, K.; Grandi, G.; Hammami, M.; Mandrioli, R.; Ricco, M.; Viatkin, A.; Vujacic, M. An Output Ripple-Free Fast Charger for Electric Vehicles Based on Grid-Tied Modular Three-Phase Interleaved Converters. IEEE Trans. Ind. Appl. 2019, 55, 6102–6114. [Google Scholar] [CrossRef]
- Cittanti, D.; Mandrile, F.; Bojoi, R. Optimal Design of Grid-Side LCL Filters for Electric Vehicle Ultra-Fast Battery Chargers. In Proceedings of the 2020 55th International Universities Power Engineering Conference, Torino, Italy, 1–4 September 2020. [Google Scholar] [CrossRef]
- Buła, D.; Jarek, G.; Michalak, J.; Zygmanowski, M. Control method of four wire active power filter based on three-phase neutral point clamped t-type converter. Energies 2021, 14, 8427. [Google Scholar] [CrossRef]
- Dharmakeerthi, C.H.; Mithulananthan, N.; Saha, T.K. Modeling and planning of EV fast charging station in power grid. In Proceedings of the IEEE Power and Energy Society General Meeting, San Diego, CA, USA, 22–26 July 2012; pp. 1–8. [Google Scholar] [CrossRef]
- Amin, M.R.; Zulkifli, S.A. A framework for selection of grid-inverter synchronization unit: Harmonics, phase-angle and frequency. Renew. Sustain. Energy Rev. 2017, 78, 210–219. [Google Scholar] [CrossRef]
- Celik, D.; Ahmed, H.; Meral, M.E. Kalman Filter-Based Super-Twisting Sliding Mode Control of Shunt Active Power Filter for Electric Vehicle Charging Station Applications. IEEE Trans. Power Deliv. 2022, 2, 1097–1107. [Google Scholar] [CrossRef]
- Elhassan, G.; Jackson, R.; Zulkifli, S.A.; Pathan, E.; Khan, M.H. A comprehensive review on time-delay compensation techniques for grid-connected inverters. Inst. Eng. Technol. Power Gener. 2020, 4, 251–266. [Google Scholar] [CrossRef]
- Anzola, J.; Aizpuru, I.; Arruti, A. Partial power processing-based converter for electric vehicle fast charging stations. Electron. 2021, 10, 260. [Google Scholar] [CrossRef]
- Andrade, J.M.; Coelho, R.F.; Lazzarin, T.B. Processing and D. Converters, Partial Power Processing and Efficiency Analysis of DC-DC Differential Converters. Energies 2022, 15, 1159. [Google Scholar] [CrossRef]
- Geetha, V.M.; Saravanan, S.; Swathisriranjani, M.; Satheesh, C.S.; Saranraj, S. Partial Power Processing Based Bidirectional Converter for Electric Vehicle Fast Charging Stations. J. Phys. Conf. Ser. 2022, 2325, 012028. [Google Scholar] [CrossRef]
- Rivera, S.; Pesantez, D.; Kouro, S.; Lehn, P.W. Pseudo-Partial-Power Converter without High Frequency Transformer for Electric Vehicle Fast Charging Stations. In Proceedings of the 2018 IEEE Energy Conversion Congress and Exposition, Portland, OR, USA, 23–27 September 2018. [Google Scholar]
- Hoffmann, F.; Person, J.; Andresen, M.; Liserre, M.; Freijedo, F.D.; Wijekoon, T. A Multiport Partial Power Processing Converter with Energy Storage Integration for EV Stationary Charging. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 7950–7962. [Google Scholar] [CrossRef]
- Rivera, S.; Rojas, J.; Kouro, S.; Lizana, R.; Renaudineau, H.; Dragicevic, T. Partial-Power Converter Topology of Type II for Efficient Electric Vehicle Fast Charging. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 7839–7848. [Google Scholar] [CrossRef]
- Errahimi, F.; Es-Sbai, N.; ElIdrissi, Z.; Cheddadi, Y. Robust integral sliding mode controller design of a bidirectional DC charger in PV-EV charging station. Int. J. Digit. Signals Smart Syst. 2021, 5, 137–151. [Google Scholar] [CrossRef]
- Saadaoui, A.; Ouassaid, M.; Maaroufi, M. Overview of Integration of Power Electronic Topologies and Advanced Control Techniques of Ultra-Fast EV Charging Stations in Standalone Microgrids. Energies 2023, 16, 1031. [Google Scholar] [CrossRef]
- Makeen, P.; Ghali, H.A.; Memon, S. Theoretical and Experimental Analysis of a New Intelligent Charging Controller for Off-Board Electric Vehicles Using PV Standalone System Represented by a Small-Scale Lithium-Ion Battery. Sustainalibity 2022, 14, 7396. [Google Scholar] [CrossRef]
- Polat, H.; Hosseinabadi, F.; Hasan, M.; Chakraborty, S.; Geury, T.; Baghdadi, M. A Review of DC Fast Chargers with BESS for Electric Vehicles: Topology, Battery, Reliability Oriented Control and Cooling Perspectives. Batteries 2023, 9, 121. [Google Scholar] [CrossRef]
- Mazhar, T.; Naz Asif, R.; Malik, M.A.; Nadeem, M.A.; Haq, I.; Iqbal, M.; Kamran, M.; Ashraf, S. Electric Vehicle Charging System in the Smart Grid Using Different Machine Learning Methods. Sustainability 2023, 15, 2603. [Google Scholar] [CrossRef]
- Wang, H.; Gan, C.; Ni, K.; Yu, Z.; Qu, R. Trajectory Control Strategy for Flux-Weakening Operation of SPMSM. IEEE Trans. Power Electron. 2023, 38, 2262–2274. [Google Scholar] [CrossRef]
- Tao, Y.; Qiu, J.; Lai, S.; Sun, X.; Zhao, J. Adaptive Integrated Planning of Electricity Networks and Fast Charging Stations Under Electric Vehicle Diffusion. IEEE Trans. Power Syst. 2023, 38, 499–513. [Google Scholar] [CrossRef]
- Shahjalal, M.; Shams, T.; Tasnim, M.N.; Ahmed, M.R.; Ahsan, M.; Haider, J. A Critical Review on Charging Technologies of Electric Vehicles. Energies 2022, 15, 8239. [Google Scholar] [CrossRef]
- Thangavel, S.; Deepak, M.; Girijaprasanna, T.; Raju, S.; Dhanamjayulu, C.; Muyeen, S.M. A Comprehensive Review on Electric Vehicle: Battery Management System, Charging Station, Traction Motors. IEEE Access 2023, 11, 20994–21019. [Google Scholar] [CrossRef]
- Blahnik, V.; Stepanek, J.; Jara, M.; Talla, J. Ultra-fast charging station for public transport vehicles. In Proceedings of the 2017 43rd Annual Conference of the IEEE Industrial Electronics Society, Beijing, China, 29 October–1 November 2017. [Google Scholar]
- Collin, R.; Miao, Y.; Yokochi, A.; Enjeti, P.; Von Jouanne, A. Advanced electric Vehicle Fast-Charging Technologies. Energies 2019, 12, 1839. [Google Scholar] [CrossRef]
- Ma, Z.; Zhong, Q.C.; Yan, J.D. Synchronverter-based control strategies for three-phase PWM rectifiers. In Proceedings of the 2012 7th IEEE Conference on Industrial Electronics and Applications, Singapore, 18–20 July 2012; pp. 225–230. [Google Scholar] [CrossRef]
- Ahmed, M.A.; Dasika, J.D.; Saeedifard, M.; Wasynczuk, O. Interleaved Swiss Rectifiers for Fast EV/PHEV Battery Chargers. In Proceedings of the 2014 IEEE Applied Power Electronics Conference and Exposition, Fort Worth, TX, USA, 16–20 March 2014. [Google Scholar]
- Kumar, M.; Pramanick, S.; Panigrahi, B.K. Reduction in Circulating Current With Improved Secondary Side Modulation, Isolated Current-Fed Half Bridge AC–DC Converter. IEEE Trans. Power Electron. 2021, 37, 5625–5636. [Google Scholar] [CrossRef]
- Ehsani, M.; Singh, K.V.; Bansal, H.O.; Mehrjardi, R.T. State of the Art and Trends in Electric and Hybrid Electric Vehicles. Proc. IEEE 2021, 109, 967–984. [Google Scholar] [CrossRef]
- Mandrile, F.; Cittanti, D.; Mallemaci, V.; Bojoi, R. Electric vehicle ultra-fast battery chargers: A boost for power system stability? World Electr. Veh. J. 2021, 12, 16. [Google Scholar] [CrossRef]
- Dong, W.; Liu, K.; Chen, L. A novel frequency-changer control strategy based on a virtual synchronous motor. CSEE J. Power Energy Syst. 2019, 5, 199–205. [Google Scholar] [CrossRef]
- Cheema, K.M.; Chaudyhary, N.I.; Tahir, M.F.; Mehmood, K.; Mudassir, M.; Kamran, M.; Milyani, A.H.; Elbarbary, Z.M.S. Virtual synchronous generator: Modifications, stability assessment and future applications. Energy Rep. 2022, 8, 1704–1717. [Google Scholar] [CrossRef]
- Fang, J.; Li, X.; Li, H.; Tang, Y. Stability Improvement for Three-Phase Grid-Connected Converters Through Impedance Reshaping in Quadrature-Axis. IEEE Trans. Power Electron. 2018, 33, 8365–8375. [Google Scholar] [CrossRef]
- Guan, Y.; Guerrero, J.M.; Zhao, X.; Vasquez, J.C.; Guo, X. A New Way of Controlling Parallel-Connected Inverters by Using Synchronous-Reference-Frame Virtual Impedance Loop—Part I: Control Principle. IEEE Trans. Power Electron. 2016, 31, 4576–4593. [Google Scholar] [CrossRef]
- Roslan, N.F. Control Strategy of Grid Connected Power Converter based on Virtual Flux Approach. Ph.D. Thesis, Universitat Politècnica de Catalunya, Barcelona, Spain, 2021. [Google Scholar]
- Roldán-Pérez, J.; Rodríguez-Cabero, A.; Prodanovic, M. Harmonic virtual impedance design for a synchronverter-based battery interface converter. In Proceedings of the 2017 6th International Conference on Renewable Energy Research and Applications, San Diego, CA, USA, 5–8 November 2017. [Google Scholar] [CrossRef]
- Mohammed, O.O.; Otuoze, A.O.; Salisu, S.; Ibrahim, O.; Rufa’i, N.A. Virtual synchronous generator: An overview. Niger. J. Technol. 2019, 38, 153–164. [Google Scholar] [CrossRef]
- Shin, D.; Lee, J.P.; Yoo, D.W.; Kim, H.J. Stability Improvement of Interleaved Voltage Source Inverters Employing Coupled Inductors for Grid-Connected Applications. IEEE Trans. Ind. Electron. 2015, 62, 6014–6023. [Google Scholar] [CrossRef]
- Bai, S.; Lukic, S.M. Unified active filter and energy storage system for an MW electric vehicle charging station. IEEE Trans. Power Electron. 2013, 28, 5793–5803. [Google Scholar] [CrossRef]
- Sang, W.; Guo, W.; Dai, S.; Tian, C.; Yu, S.; Teng, Y. Virtual Synchronous Generator, a Comprehensive Overview. Energies 2022, 15, 6148. [Google Scholar] [CrossRef]
- Muftau, B.; Fazeli, M. The Role of Virtual Synchronous Machines in Future Power Systems: A Review and Future Trends. Electr. Power Syst. Res. 2022, 206, 107775. [Google Scholar] [CrossRef]
- Mallemaci, V.; Mandrile, F.; Rubino, S.; Mazza, A.; Carpaneto, E.; Bojoi, R. A comprehensive comparison of Virtual Synchronous Generators with focus on virtual inertia and frequency regulation. Electr. Power Syst. Res. 2021, 201, 107516. [Google Scholar] [CrossRef]
- Yang, Z.; Mei, C.; Cheng, S.; Zhan, M. Comparison of Impedance Model and Amplitude-Phase Model for Power-Electronics-Based Power System. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 2546–2558. [Google Scholar] [CrossRef]
- Amorim, T.S.; Carletti, D.; Encarnacao, L.F. Enhanced Virtual Synchronous Generator with Harmonic Current Filtering Capability. In Proceedings of the Industrial Electron Conference, Vitória, Brazil, 4–7 October 2019. [Google Scholar]
- Yan, X.; Qin, F.; Jia, J.; Zhang, Z.; Li, X.; Sun, Y. Virtual synchronous motor based-control of Vienna rectifier. Energy Rep. 2020, 6, 953–963. [Google Scholar] [CrossRef]
- Sreekumar, P.; Khadkikar, V. A New Virtual Harmonic Impedance Scheme for Harmonic Power Sharing in an Islanded Microgrid. IEEE Trans. Power Deliv. 2016, 31, 936–945. [Google Scholar] [CrossRef]
- Ding, D.; Zhang, G.; Wang, G.; Mijatoviv, Z.N.; Gragicevic, T.; Xu, D. Impedance Reshaping for Inherent Harmonics in PMSM Drives With Small DC-Link Capacitor. IEEE Trans. Power Electron. 2022, 37, 14265–14279. [Google Scholar] [CrossRef]
- He, P.; Li, Z.; Jin, H.; Zhao, C.; Fan, J.; Wu, X. An adaptive VSG control strategy of battery energy storage system for power system frequency stability enhancement. Int. J. Electr. Power Energy Syst. 2023, 149, 109039. [Google Scholar] [CrossRef]
- Yusoff, N.A.; Razali, A.M.; Karim, K.A.; Sutikno, T.; Jidin, A. A concept of Virtual-Flux Direct Power Control of three-phase AC-DC converter. Int. J. Power Electron. Drive Syst. 2017, 8, 1776–1784. [Google Scholar] [CrossRef]
- Wang, A.; Zhang, J. An accurate active power sharing study in virtual flux angle droop method. In Proceedings of the 2017 43rd Annual Conference of the IEEE Industrial Electronics Society, Beijing, China, 29 December–1 January 2017. [Google Scholar]
- Bi, K.; Xu, Y.; Zeng, P.; Chen, W.; Li, X. Virtual Flux Voltage-Oriented Vector Control Method of Wide Frequency Active Rectifiers Based on Dual Low-Pass Filter. World Electr. Veh. J. 2022, 13, 35. [Google Scholar] [CrossRef]
- Güven, A.F.; Akbaşak, S.B. DC Fast Charging Station Modeling and Control for Electric Vehicles. Black Sea J. Sci. 2021, 1, 680–704. [Google Scholar] [CrossRef]
- Pan, L.; Zhang, C. Performance Enhancement of Battery Charger for Electric Vehicles Using Resonant Controllers. Energy Procedia 2017, 105, 3990–3996. [Google Scholar] [CrossRef]
- Jean-Pierre, G.; Beheshtaein, S.; Altin, N.; Nasiri, A. A Control Scheme for a DC Extreme Fast Charger with RMS Current Minimization. In Proceedings of the 2021 IEEE 12th International Symposium on Power Electronics for Distributed Generation Systems, Chicago, IL, USA, 28 June–1 July 2021. [Google Scholar] [CrossRef]
- Salimin, S.; Noor, A.F.B.M.; Jumaat, S.A. Proportional resonant current controller strategy in inverter application. Int. J. Power Electron. Drive Syst. 2019, 10, 2238–2244. [Google Scholar] [CrossRef]
- Seth, A.K.; Singh, M. Resonant controller of single-stage off-board EV charger in G2V and V2G modes. IET Power Electron. 2020, 13, 1086–1092. [Google Scholar] [CrossRef]
- Anzola, J.; Aizpuru, I.; Romero, A.A.; Loiti, A.A.; Lopez-Erauskin, R.; Artal-Sevil, J.S.; Bernal, C. Review of Architectures Based on Partial Power Processing for DC-DC Applications. IEEE Access 2020, 19, 103405–103418. [Google Scholar] [CrossRef]
- Dragicevic, T.; Vinnikov, D. Guest Editorial Special Issues on Topology Modeling, Control, and Reliability of Bidirectional DC/DC Converter in DC Microgrid. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 1188–1191. [Google Scholar] [CrossRef]
- Hosoyamada, Y.; Fujimoto, Y.; Yuzuhiara, I.; Kawamura, A. Individual Deadbeat Control for Three-Phase Interleaved Buck DC/DC Converters. IEEE Trans. Ind. Appl. 2020, 56, 5065–5074. [Google Scholar] [CrossRef]
- Rafi, M.A.H.; Bauman, J. A Comprehensive Review of DC Fast-Charging Stations with Energy Storage: Architectures, Power Converters, and Analysis. IEEE Trans. Transp. Electrif. 2021, 7, 345–368. [Google Scholar] [CrossRef]
- Liu, C.; Zhang, Z.; Andersen, M.A.E. An Efficient Voltage Step-up/down Partial Power. In Proceedings of the 2021 IEEE Workshop on Wide Bandgap Power Devices and Applications in Asia (WiPDA Asia), Wuhan, China, 25–27 August 2021. [Google Scholar]
- Hou, N.; Li, Y.; Quan, Z.; Li, Y.R.G.; Zhou, A. Unified Fast-Dynamic Direct-Current Control scheme for Intermediary Inductive AC-Link Isolated DC-DC Converters. IEEE Open J. Power Electron. 2021, 2, 383–400. [Google Scholar] [CrossRef]
- Leone, C.; Longo, M.; Brenna, M. Impact Analysis of Ultra-Fast Charging Station by Monte Carlo Simulation. In Proceedings of the 2020 IEEE International Conference on Environment and Electrical Engineering and IEEE Industrial and Commercial Power Systems Europe, Madrid, Spain, 9–12 June 2020. [Google Scholar] [CrossRef]
- Seyezhai, R.; Aarthi, V. Simulation and Implementation of AC-DC Interleaved Boost Converter with Voltage Multiplier for Phev. ICTACT J. Microelectron. 2016, 2, 247–253. [Google Scholar] [CrossRef]
- Elhassan, G.; Zulkifli, S.A.; Bevrani, H.; Momoh, K.; Iliya, S.Z.; Khan, M.H.; Jackson, R.; Ahmed, M. Deadbeat Current Control in Grid-Connected Inverters: A Comprehensive Discussion. IEEE Access 2022, 10, 3990–4014. [Google Scholar] [CrossRef]
- Madhuri, G.; Veena Madhuri, K.; Navya, M.; Panduranga Reddy, G. Fast Charging Electric Vehicle using Fuzzy Logic Controller. Int. J. Eng. Res. 2020, 9, 499–502. [Google Scholar] [CrossRef]
- Shahzad, M.I.; Iqbal, S.; Taib, S. LLC series resonant converter with PID controller for battery charging application. In Proceedings of the 2014 IEEE Conference on Energy Conversion, Johor Baharu, Malaysia, 13–14 October 2014. [Google Scholar]
- Patil, D.; Deepa, K. Harmonic Analysis of Grid Connected Electric Vehicles with Residential Load for Different Filters. In Proceedings of the International Conference on Innovative Computing Intelligent Communication and Smart Electrical Systems, Chennai, India, 24–25 September 2021. [Google Scholar]
- Rahman, S.; Imteaj, A.; Khan, I.; Amini, M.H. Cascaded Solid State Transformer Structure to Power Fast EV Charging Stations from Medium Voltage Transmission Lines. In Proceedings of the 2020 54th Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 1–4 November 2020. [Google Scholar]
- Barrero-González, F.; Milanés-Montero, M.I.; González-Romera, E.; Romero-Cadaval, E.; Roncero-Clemente, C. Control strategy for electric vehicle charging station power converters with active functions. Energies 2019, 12, 3971. [Google Scholar] [CrossRef]
- Rivera, S.; Wu, B. Electric Vehicle Charging Station with an Energy Storage Stage for Split-DC Bus Voltage Balancing. IEEE Trans. Power Electron. 2017, 32, 2376–2386. [Google Scholar] [CrossRef]
- Verma, A.; Singh, B. AFF-SOGI-DRC Control of Renewable Energy Based Grid Interactive Charging Station for EV with Power Quality Improvement. IEEE Trans. Ind. Appl. 2021, 57, 588–597. [Google Scholar] [CrossRef]
- Gedara, P.; Champa, H.; Dharmakeerthi, H. Electric Vehicle Integration- Grid Stability Concerns and Countermeasures. Ph.D. Thesis, University of Queensland, Brisbane, Australia, 2014. [Google Scholar]
- Zhang, Y.; Xu, D.; Liu, J.; Gao, S.; Xu, W. Performance Improvement of Model-Predictive Current Control of Permanent Magnet Synchronous Motor Drives. IEEE Trans. Ind. Appl. 2017, 53, 3683–3695. [Google Scholar] [CrossRef]
- Da Camara, R.A.; Fernandez-Ramirez, L.M.; Praca, P.P.; De Oliveira, D.; Garcia-Trivino, P.; Sarrias-Mena, R. An Application of the Multi-Port Bidirectional Three-Phase AC-DC Converter in Electric Vehicle Charging Station Microgrid. In Proceedings of the 2019 IEEE 15th Brazilian Power Electronics Conference, Santos, Brazil, 1–4 December 2019. [Google Scholar]
- Nair, A.C.; Fernandes, B.G. Solid-State Transformer Based Fast Charging Station for Various Categories of Electric Vehicles with Batteries of Vastly Different Ratings. IEEE Trans. Ind. Electron. 2021, 68, 10400–10411. [Google Scholar] [CrossRef]
- Badawy, M.; Ahmed, A.; Sozer, Y.; Yi, P. Active THD reduction strategy for grid connected EV charging stations. In Proceedings of the 2013 IEEE Energy Technology Conference, Cleveland, OH, USA, 27 June 2013. [Google Scholar] [CrossRef]
- Ghorbani, M.J.; Atashpar, S.; Mehrafrooz, A.; Mokhtari, H. Nonlinear Loads Effect on Harmonic Distortion and Losses of Distribution Networks Nonlinear Loads Effect on Harmonic Distortion and Losses. In Proceedings of the International Power System Conference, Tehran, Iran, 31 October–2 November 2011. [Google Scholar]
- Ramirez, J.M.; Montalvo, E.T. Handling a back-to-back converter prototype by the virtual synchronous generator strategy. In Proceedings of the 2012 1st Conference on IEEE Power Technology, Madrid, Spain, 28 June–2 July 2021. [Google Scholar] [CrossRef]
- Shen, P.; Ouyang, M.; Lu, L.; Li, J.; Feng, X. The co-estimation of state of charge, state of health, and state of function for lithium-ion batteries in electric vehicles. IEEE Trans. Veh. Technol. 2018, 67, 92–103. [Google Scholar] [CrossRef]
- Zhang, Z.; Cheng, X.; Lu, Z.Y.; Gu, D.J. SOC Estimation of Lithium-Ion Battery Pack Considering Balancing Current. IEEE Trans. Power Electron. 2018, 33, 2216–2226. [Google Scholar] [CrossRef]
- Xu, W.; Xu, J.; Lang, J.; Yan, X. A Multi-Timescale estimator for lithium-ion battery state of charge and state of energy estimation using dual h infinity filter. IEEE Access 2019, 7, 181229–181241. [Google Scholar] [CrossRef]
- An, F.; Jiang, J.; Zhang, W.; Zhang, C.; Fan, X. State of Energy Estimation for Lithium-Ion Battery Pack via Prediction in Electric Vehicle Applications. IEEE Trans. Veh. Technol. 2022, 71, 184–195. [Google Scholar] [CrossRef]
- Kumar, S.; Usman, A. A review of converter topologies for battery charging applications in plug-in hybrid electric vehicles. In Proceedings of the 2018 IEEE Industry Applications Society Annual Meeting, New Delhi, India, 10–11 November 2018. [Google Scholar] [CrossRef]
- Wang, Q.; Gu, H.; Ye, M.; Wei, M.; Xu, X. State of Charge Estimation for Lithium-Ion Battery Based on NARX Recurrent Neural Network and Moving Window Method. IEEE Access 2021, 9, 83364–83375. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Ref. | Strategy | Algorithm Complexity | Contribution | Drawbacks |
|---|---|---|---|---|---|
| 1 | [60,63] | PPC | Very high | Single-voltage feedback control in the DC mode; high power decoupling ability. | Major problems of harmonic distortion losses, longer charging time and slow transient response. |
| 2 | [61,64] | PPC | High | Cascade control structure for battery current, voltage regulation and high output voltage from low-input voltage source in FCS control. | Efficiency reduces significantly with higher ratings; FCS above 50 KW and slow dynamics response. |
| 3 | [65,66] | MBC | Simple | Highly adaptable to parameter variation in FCS operation. | Not suitable for multiple FCS operation; switching and power losses problem. |
| 4 | [67,68] | MBC | High | Reduces switching losses; robustness against voltage disturbance. | Frequency variation, power exchange instability problem; shows negative incremental impedance at constant EV load. |
| 5 | [72,73] | FBC | Very High | Reduces circulating current and harmonics; aids reactive power and voltage regulation. | Frequency fluctuation and instability problem at higher FCS capacity above 50 KW. |
| No. | Ref. | VSM Technique | Strategy | Contribution | Drawbacks | Control Complexity |
|---|---|---|---|---|---|---|
| 1 | [90] | Synchronous generator (SG)-based model | VAC-PI | Accurately simulates electromagnetic characteristics of SG and requires no frequency derivative synchronization. | Possesses weak resistance to interference due to voltage open-loop control and numerical instability issues. | Very high |
| 2 | [80,91] | Swing equation-based | VAC-PI | Provides frequency adaptability to sudden changes in load profile. | Excitation control issues; prone to synchronous resonance; weak stability during multiple FCS operations. | Simple |
| 3 | [86,89] | Droop-based technique | VHI-PI | Adaptable to changes in single FCS load and enhances stability of system. | Power sharing accuracy depends on rectifier output and line impedance. | Simple |
| 4 | [88] | Frequency–power response-based | VHI-PI | Provides configurable output impedance and highly suitable for weak grid operation. | Stability margins are reduced with higher values of virtual resistance and it is hard to regulate dynamics. | High |
| 5 | [98,99] | Frequency–power response-based | VFC-PI | Provides fast response and frequency support in single FCS load. | Drift and saturation effect due to DC offset in the integrated signals lag voltage by 90° phase shift. | Simple |
| 6 | Proposed | Droop-based SOC technique | VSM-SOC | Adaptability to EV battery SOC. Fast transient response. Active and reactive power decoupling. Frequency and voltage regulation at PCC. Adaptable to SOC charge and discharge limit condition. It allows current limiting capability. | NIL | Simple |
| No. | Refs. | FCSR | Ղ | CC | VC | PC | SC | CTHD | SF | PF | GI | MT |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | [23] | 3 Φ 170 kW | 95.5% | DB | DB | I, V | CS | --- | 50 kHz | 0.94 | --- | PSFM |
| 2 | [45] | 3 Φ 60 kW | --- | DB | DB | I, V | CS | 4.62% | 20 kHz | 0.91 | IM | PSFM |
| 3 | [46] | 3 Φ 150 kW | 66.6% | PI | PI | I | CS | --- | 20 kHz | --- | --- | PSM |
| 4 | [59] | 3 Φ 90 kW | 99.62% | PI | --- | I | CS | 8.32% | 10 kHz | 0.97 | UUML | PWM |
| 5 | [62] | 3 Φ 70 kW | 98.77% | PI | PI | I, V | CS | 7.527% | 10 kHz | 0.89 | UUML | PWM |
| 6 | [111] | 3 Φ 130 kW | 99.5% | PI | --- | I | CS | --- | 100 kHz | 0.93 | UUML | PWM |
| No. | Refs. | FCSR | Ղ | SC | PC | IC | OC | GC | CTHD | PF | SF | MT | GI |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | [20] | 3 Φ 50 kW | 94.5% | CS | I, V | PID | PID | 10 A | 4.80% | 0.987 | 75 kHz | PWM | --- |
| 2 | [50] | 3 Φ 50 kW | 95.3% | GS | V | PR | PR | 59.8 A | 3.72% | 0.990 | 50 kHz | FFC | UUML |
| 3 | [52] | 3 Φ 150 kW | --- | CS | I, V | PI | --- | --- | 3.40% | 1.0 | 16 kHz | PWM | IM |
| 4 | [112] | 3 Φ 50 kW | --- | CS | I, V | PI | --- | --- | --- | 0.880 | 10 kHz | FDDC | UUML |
| 5 | [114] | 3 Φ 50 KW | 94.3% | CS | I | PI | --- | --- | 50.67% | 0.924 | 50 kHz | PWM | UUML |
| No. | Refs. | FCSR | FT | CC | VC | PC | Ղ | GS | PF | CTHD | MT | GC | SF | GI |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | [19] | 3 Φ 50 kW | RL | DB | DB | --- | 98.4% | REB | 0.7 | 4.68% | NM | 36.5 A | 50 kHz | UUML |
| 2 | [95] | 3 Φ 100 kW | L | PI | --- | PI | 83.0% * | DCLC | 1.0 | 2.34% | SPWM | --- | 10 kHz | IM |
| 3 | [119] | 3 Φ 105 kW | ABPF | PID | PID | PID | 95% | --- | 0.828 | 24.82% | PWM | 37.6 A | 50 kHz | UUML |
| 4 | [121] | 3 Φ 50 kW | RL | PI | PI | --- | --- | ESS | 1.0 | 14.6% | SVM | 14.8 A | --- | UUML |
| 5 | [122] | 3 Φ 50 kW | RLC | PR | PR | --- | --- | REB | 0.9 | 4.8% | PWM | 16.7 A | 50 kHz | IM |
| No. | Refs. | FCSR | GST | ղ | PC | IC | OC | GI | CTHD | GC | PF | MT | SF |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | [80] | 1 Φ 300 kW | DCC | 85.5% * | I, F | PI | PI | SFSL | 5.0% | 36 A | 1.0 | ZSI | I10 KHz |
| 2 | [83] | 1 Φ 60 kW | VHI | 90.1% * | I, V | PI | PI | --- | --- | 5 A | 1.0 | PWM | 10 kHz |
| 3 | [85] | 3 Φ 100 kW | VFC | 87.3% * | I, F | --- | --- | IM | 2.9% | 29 A | 1.0 | PWM | 10 kHz |
| 4 | [94] | 3 Φ 100 kW | VHI | 74.9% * | F | PI | PI | IM | 12.3% | 513 A | 1.0 | PWM | --- |
| 5 | [125] | 3 Φ 100 kW | FFC | 95.7% | I, V | PI | PI | UUML | 1.394% | --- | 0.9999 | PSM | 50 kHz |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Momoh, K.; Zulkifli, S.A.; Korba, P.; Sevilla, F.R.S.; Afandi, A.N.; Velazquez-Ibañez, A. State-of-the-Art Grid Stability Improvement Techniques for Electric Vehicle Fast-Charging Stations for Future Outlooks. Energies 2023, 16, 3956. https://doi.org/10.3390/en16093956
Momoh K, Zulkifli SA, Korba P, Sevilla FRS, Afandi AN, Velazquez-Ibañez A. State-of-the-Art Grid Stability Improvement Techniques for Electric Vehicle Fast-Charging Stations for Future Outlooks. Energies. 2023; 16(9):3956. https://doi.org/10.3390/en16093956
Chicago/Turabian StyleMomoh, Kabir, Shamsul Aizam Zulkifli, Petr Korba, Felix Rafael Segundo Sevilla, Arif Nur Afandi, and Alfredo Velazquez-Ibañez. 2023. "State-of-the-Art Grid Stability Improvement Techniques for Electric Vehicle Fast-Charging Stations for Future Outlooks" Energies 16, no. 9: 3956. https://doi.org/10.3390/en16093956