
Trends and Emerging Technologies for the Development of Electric Vehicles



1
Automotive Platforms and Application Systems (APAS) R&D Centre, Hong Kong Productivity Council (HKPC), Hong Kong 999077, China
2
Faculty of Science, Engineering and Technology, Swinburne University of Technology, Melbourne, VIC 3122, Australia
3
Institute of Robotics and Intelligent Systems, Department of Health Sciences and Technology, ETH Zürich, 8008 Zürich, Switzerland
4
Empa, Swiss Federal Laboratories for Materials Science and Technology, ETH Domain, 8600 Dübendorf, Switzerland
*
Authors to whom correspondence should be addressed.
†
These authors contributed equally to this work.
Energies 2022, 15(17), 6271; https://doi.org/10.3390/en15176271
Submission received: 19 July 2022
/
Revised: 25 August 2022
/
Accepted: 25 August 2022
/
Published: 28 August 2022
(This article belongs to the Special Issue Advanced Technologies in New Energy Vehicle)
Abstract
:In response to severe environmental and energy crises, the world is increasingly focusing on electric vehicles (EVs) and related emerging technologies. Emerging technologies for EVs have great potential to accelerate the development of smart and sustainable transportation and help build future smart cities. This paper reviews new trends and emerging EV technologies, including wireless charging, smart power distribution, vehicle-to-home (V2H) and vehicle-to-grid (V2G) systems, connected vehicles, and autonomous driving. The opportunities, challenges, and prospects for emerging EV technologies are systematically discussed. The successful commercialization development cases of emerging EV technologies worldwide are provided. This review serves as a reference and guide for future technological development and commercialization of EVs and offers perspectives and recommendations on future smart transportation.
1. Introduction
In response to the dire climate and energy crisis, increased global attention has been directed toward the electrification of transportation systems to develop electric vehicles (EVs) [1]. Currently, there are still a large number of conventional internal combustion engine (ICE) vehicles in operation worldwide, and they consume considerable amounts of fossil fuels. Therefore, the acceleration of the electrification of vehicles is imminent. Pure battery EVs, plug-in hybrid EVs, and fuel cell EVs constitute the “green” EV groups. Plug-in hybrid EVs can be considered a transition model, as they still consume fossil fuels and emit pollutants [2]. Although fuel cell EVs have many advantages, such as high energy efficiency, long cruising range, and fast hydrogen refueling, their technology and market are still very immature [3]. Pure battery EVs are zero-emission vehicles that operate entirely on electricity produced by batteries. With the continuous breakthrough of battery technologies, the rapid construction of charging facilities, and people’s pursuit of low-carbon travel in recent years, pure battery EVs currently occupy most of the EV market and are well-deserved mainstream models [4,5,6]. In this context, all EVs below refer to pure battery EVs only.
Traveler range anxiety [7,8], insufficient charging infrastructures [9,10], and challenging charging time management [11,12] are the most significant obstacles hindering the development of EVs. Representative emerging EV technologies, including wireless charging [13], smart power distribution [14], vehicle-to-home (V2H) and vehicle-to-grid (V2G) [15], connected vehicles (CVs) [16], and autonomous driving [17], provide new solutions to the persistent problems that plague the development and popularization of EVs and also bring good opportunities for the rapid development of new EV markets. Wireless charging and autonomous driving make the use of EVs more convenient and intelligent, and can also significantly increase the range of EVs without increasing the weight of the battery. The popularity of wireless charging, smart grid, and V2G also provides solutions to alleviate the shortage of charging facilities and rational charging time management. Smart power distribution and V2G can reduce the pressure on the grid during peak charging of EVs and combine V2H to use electricity more rationally. Moreover, CVs and autonomous driving will significantly improve the driving experience of people’s travel and bring new impetus to the promotion of EVs in addition to environmental and energy concerns.
Despite significant advances in fundamental research on battery materials, powertrains, and control strategies for EVs at the technical level, much remains to be accomplished for the successful commercialization of EVs, especially in most developing countries. At present, there have been good reviews that summarize the development and technical status of various EV technologies, including battery technologies [18,19], motor technologies [20,21], charging technologies [22,23], powertrain systems [23,24], etc. Although the previous analyses and summaries of EVs are very comprehensive and detailed, the emergence and rapid development of the above-mentioned new technologies and their successful application in EVs have set off a new revolution in the field of EVs, which calls for a timely review. In addition, previous reviews lacked attention to the commercialization of EVs, which is not conducive to the development of this applied discipline. The development of emerging technologies for EVs can broaden the market and promote the adoption of EVs. To the best of our knowledge, this is the first review paper comprehensively summarizing and reviewing all of these multiple emerging EV technologies, with a particular focus on the commercial development and market products of these new technologies.
Herein, this paper aims to reveal new trends and emerging technologies in the recent development of EVs, and to discuss in detail the challenges and new opportunities brought by wireless charging, smart power distribution, V2G and V2H systems, CVs, and autonomous driving. The following discussion will be divided into five subsections corresponding to these five new trends, as clearly presented in Figure 1. In each new trend subsection, the benefits and business opportunities are summarized after a brief introduction of the cutting-edge technologies. Subsequently, typical technological developments are highlighted, with a focus on successful business cases and representative examples of emerging technology products in major countries. Then, a discussion of new technology prospects follows, and the future challenges and opportunities are presented. Finally, conclusions and outlooks for future EV development are provided. The new technologies involved in this review are of great significance for solving the existing technical bottlenecks of EVs, improving the attractiveness of EVs to consumers, and promoting their market development and maturity. The successful experience of EV development in some typical countries summarized in this paper provides certain guiding experience and a leading role for the future paths of EVs. Therefore, this article provides perspectives and recommendations on the development of EVs in future smart cities.
2. Wireless Charging
2.1. Wireless Charging Technologies
If the induction charging system is in a magnetic resonance coupling state, even if the transmitting and receiving coils are further away than a few feet apart, excellent charging efficiency can still be guaranteed [25,26]. Benefiting this principle, when the induction charging system has well-tuned hardware devices and is positioned at the optimal angle, vehicles parked in garages or on the street can be charged efficiently at large gap distances with 3–7 kW of electrical power, operating in the MHz frequency range [27,28]. The schematic diagram of a common stationary wireless charging is displayed in Figure 2a.
2.2. Benefits and Business Opportunities
Wireless charging provides great convenience to vehicle owners and has the advantage of more versatility, permanence, and reliability compared to traditional charging methods. It not only avoids irreparable defacement and abrasion to charging connectors caused by harsh environments (stains, corrosion) and frequent drop-and-insert but also ensures secured charging in scenarios with potential danger, including explosive gas stations where electrical sparks are prohibited [31,32]. Due to a series of supportive government policies and subsidies conducive to the construction of charging stations, the cost and obstacles to developing the new energy industry have been significantly reduced. Coupled with the gradual development of power-driven technology, both supply and demand for EVs will increase sharply. Driven by these factors, the global market for EV wireless charging is expected to expand at a compound annual growth rate (CAGR) of 49.38% from 2020 to 2025 [33]. The continued increase in fast EV chargers will become another core to further drive the market, with a scale exceeding $7 billion in 2025. The advanced dynamic charging concept aims to continuously charge EVs waiting for signals or even in motion using electromagnetic coils preset under the road, as shown in Figure 2b. The vision of the future smart city with a well-established wireless charging system is described in Figure 2c.
2.3. Technological Developments
The representative wireless charging products that have appeared on the market will be introduced as follows to demonstrate the commercial progress.
2.3.1. Plugless Power
“Plugless Power” is a set of EVSE series products of Evatran, which consists of a wall-mounted control board for parameter setting, a floor-mounted parking mat with a transmitting coil, and a vehicle adapter with a receiving coil mounted on the vehicle chassis [34,35]. When an EV with a Plugless power adapter is parked on the parking mat, the control system will automatically detect and align the position of the transmitting and receiving coils and perform a sustained charge, up to 7.2 kW of power, without any external physical connection, as shown in Figure 3a. Evatran has already provided customized EVSE products to numerous well-known vehicle models, such as the BMW i3, Nissan Leaf, and Tesla Model S.
2.3.2. WiTricity
WiTricity, an American high-tech company, has produced a wireless energy transfer system based on alternating magnetic resonance [39]. The system (Figure 3b) has an adjustable output power interval, with a wide range from 3.6 to 11 kW, so that it can satisfy the charging needs of PHEVs equipped with small and short-range battery packs to EVs equipped with large ones [40].
2.3.3. Qualcomm Halo™
Qualcomm Halo™ wireless charging products, introduced by Qualcomm, are high-power wireless charging solutions based on magnetic resonance technology [41,42] (Figure 3c). The system covers 3.7 kW, 7.4 kW, 11 kW, and 22 kW of wireless fast charging power using a charging mat mounted on the ground with over 90% system efficiency [43]. Moreover, it is also equipped with auxiliary functions such as foreign object detection (FOD) and positioning guidance. Qualcomm sponsored the Formula Electric Championship as a founding technical partner and integrated the 7.4 kW system into the BMW i8 medical vehicle.
2.3.4. Zonecharge
2.3.5. APAS and HKPC
In 2017, based on the Society of Automotive Engineers (SAE) standard, the Automotive Platforms and Application Systems (APAS) R&D Centre and Hong Kong Productivity Council (HKPC) developed a wireless charging device based on magnetic resonance coupling that can fill up a small EV in 3 h with a power output of 7 kW, as shown in Figure 3d.
2.4. Prospects
The following will prospect the future development of wireless charging from the perspectives of commercialization and technology. Dynamic and fast wireless charging will become two important outlets and breakthroughs for EV wireless charging development.
2.4.1. Commercialization
The Dynamic EV Charging (DEVC) concept, which charges moving vehicles on the road, has attracted the research attention of innovators, scientists, and engineers, as the developing trend for the next generation of wireless charging. Qualcomm, an industry leader and in-depth researcher in wireless charging, has taken the lead in conducting actual track tests about DEVC [41]. This unique 100 m-long test track contains four energy supply units, each responsible for supplying energy for 25 m of the track. A pair of test EVs drove through the track at highway speeds of 100 km/h while achieving dynamic charging efficiency of up to 20 kW. In addition to supporting simultaneous dynamic charging of multiple vehicles, Qualcomm also indicated that forms of motion do not constrain charging behavior, whether forward or reverse. Qualcomm is currently actively investigating DEVC construction with relevant parties, including transport authorities, power companies, and infrastructure companies, to accelerate its commercialization.
2.4.2. Fast Wireless EV Charging
Electric buses and trucks require large-capacity battery packs due to their long-distance travel and heavy-duty feature. The increasing usage of EVs has dramatically expanded the demand for high-power fast charging. The substantial government subsidies for the construction of shared charging infrastructure also make it possible to promote fast wireless charging up to 50 kW.
2.4.3. Future Challenges and Opportunities
Challenges and opportunities in the future development of wireless charging in EVs are summarized in Table 1.
3. Smart Power Distribution Technologies
3.1. Power Distribution Technology
Effective power distribution can charge more EVs without major infrastructure upgrades. Instead of installing additional physical electrical capacity, the power distribution system can dynamically share existing power across more EV chargers to charge more EVs [47,48,49]. The advantages of smart power distribution are demonstrated by a representative system in Figure 4a. In other scenarios, private and fleet EV drivers expect easy access to charging facilities along the route. The drivers need transparently shared charging pile information, including real-time information on charger availability and peak and off-peak pricing. With a comprehensive back-end charging centralized control and management system, drivers will be provided with advanced EV charging management solutions, including smart energy management with demand-side responsiveness [50].
3.2. Battery Integrated Charging Solutions
The introduction of renewable energy sources and secondary batteries in the electricity grid is emerging as an advanced technology of smart power distribution that facilitates the implementation of fast EV chargers. The secondary batteries and renewable energy sources, such as green energy generators, can refeed surplus power generation into the electricity grid to boost its power capacity. Secondary batteries, as energy buffers, can supply energy in emergencies when the grid is overloaded or disconnected [52].
3.3. Benefits and Business Opportunities
The development of EV power distribution technology faces abundant opportunities with challenges. The growing number of EVs will place unprecedented demands on the urban grid’s peak carrying capacity, as most EV charging times are highly overlapping, typically at night [53]. Concentrated charging results in an extreme spike in electricity demand during those hours each day, whereas power capacity is not fully utilized for most of the rest [54]. This situation can adversely affect everyone who receives electricity service. On the one hand, the voltage drop and instability caused by the concentration may result in the breakdown of appliances. On the other hand, the increase in generation capacity and the reinforcement of hardware facilities inevitably raise the electricity price. These downsides are already seen in some developed countries. Statistics show that the UK will invest over £2 billion to optimize at least 30% of its low-voltage network to satisfy the peak demand for centralized EV charging. However, if smart distribution systems are widely deployed to manage EV charging behavior, making better use of the power capacity of the existing grid, the low-voltage network upgrade will be delayed or prevented [55]. In addition, as an essential part of a smart city, the popularity of smart power distribution will facilitate the development of smart buildings and the photovoltaic industry [56].
3.4. Technological Development
The representative developed charge node power distribution products on the market are as follows.
3.4.1. EVBox
EVBox stations, manufactured by a leading producer of charging station hardware and management software, feature workload balance, hub, satellite configuration, and “peak clipping” [56]. The office building that provides power to all charging stations is a good example to illustrate the role that EVBox performs as middleware. These functions make it possible to organize charging behavior flexibly based on the existing infrastructure [57]. Workload balance dynamically allocates available power capacity to all working charging nodes in the system, achieving overall optimal system efficiency without overloading. A hub and satellite configuration allows up to 20 charging nodes to be cost-effectively interconnected via a single modem and back-office software, enabling unified management under a centralized controller. When multiple vehicles are being charged simultaneously, the surging load makes “peak clipping” indispensable. When the power system is overloaded, it will promptly reduce the output power or disconnect until there is a surplus of electricity.
3.4.2. APAS and HKPC
Proposed by APAS and HKPC, the semi-quick EV charging station “Charging Pro” (Figure 4b), has the following functions:
- An Intelligent Load Management System explicitly regulates the output power of the EV charging nodes to avoid the risk of overload and maximize electricity utilization;
- A Charging Facility Measurement and Management System could record and analyze individual charging node data in real-time to minimize operating and service costs.
3.5. Prospects
3.5.1. Building Electricity Distribution Systems
The low-voltage electricity distribution system is the segment that connects one or more electricity grid interfaces and delivers electricity to each appliance after rational distribution [58]. It is the final unit of the power transmission system, facing the end consumers and directly determining the reliability and quality of electricity consumption. Additionally, since distributing power to the smart grid involves more complex communication and distant control functions, the system requires additional power supplies and distribution panels. Most property sectors cannot undertake the high cost required to install charging stations and optimize the distribution system. Thus, the majority of buildings are not provided with EV charging stations. Therefore, this is one of the future key development directions of EV services.
3.5.2. Future Challenges and Opportunities
Challenges and opportunities in the future development of smart power distribution for EVs are summarized in Table 2.
4. V2H and V2G
4.1. V2H and V2G Technologies
The V2H system allows the use of electricity already stored in the EV to power the household, whereas the V2G system supports selling the electricity already stored in the EVs to the grid and purchasing electricity from the grid, charging the EV [60]. The V2H and V2G systems mainly consist of battery management software, hardware that supports bidirectional electricity transmission, and communication modules between the vehicle terminal and the grid operator [61]. Intelligent algorithms monitor the operating status of the grid in real-time to determine whether a vehicle can purchase electricity from or sell electricity to the grid at the moment and whether a vehicle is available to reach the corresponding agreement.
4.2. Benefits and Business Opportunities
As demonstrated in Figure 5, with the V2H system, owners could charge their EVs during the day via solar energy or during non-peak times with lower electricity prices, and then power household appliances at night or during peak hours using the stored energy [62]. The onboard battery can also provide emergency power in case of grid breakdown. Using the V2G system, owners could charge during non-peak hours and feed the stored energy back to the grid to boost its electricity capacity during peak hours [63]. This charging strategy could relieve grid loading pressure during peak hours and stabilize grid operation by reducing the range of loading fluctuations. Meanwhile, EVs can serve as sizeable offline storage devices for renewable energy, facilitating the dispatch of electricity across time scales.
4.3. Technological Developments
Denmark, the Netherlands, the U.S., Japan, and Hong Kong are the leading countries and regions developing V2G and V2H technologies. Typical V2G and V2H technologies and products in these regions may provide references for the future development of other countries and regions.
4.3.1. Denmark
Denmark has the world-leading wind power generation industry, with 42% of its domestic energy generated by wind power up to 2015. Several research projects related to V2G were initiated as early as 2009. Between 2009 and 2013, Denmark launched a partially government-sponsored research project called the EDISON project on the eastern island, Bornholm, to lay the foundation for the turbine power system, which will be completed by 2025. Wind power will provide half of the total energy supply for the island, while the V2G system will serve as an alternative to avoid damage to the island’s electricity grid. The EDISON project demonstrated the full-stack solutions offered by Danish and international companies to develop the EV integrated system, including network construction, market solutions, and the optimization of the interaction between diverse energy technologies [65,66]. Moreover, the Danish electricity system creates a perfect experimental platform for testing and optimizing such projects. After the EDISON project, the Nikola project was launched as a Danish research and demonstrative project to establish a framework for interacting with EVs and the electricity system in the campus laboratory environment. The project was completed in 2016 as a collaboration among DTU, NUVVE, and Nissan. The latest Parker project, launched in 2016, aimed to supply electrical services to the Danish electrical system from EVs serving as the operational fleet [67]. The experimental project, carried out by the DTU, NUVVE, and INSERO organizations in collaboration with the automotive original equipment manufacturer called Nissan and Danish Convoy holder, has the following innovative features:
- Evaluating advanced smart grid services, such as V2G, by mass-produced vehicles and charging stations;
- Using a vehicle-assisted power system to coordinate supply and demand;
- Verifying the incorporation of vehicles into the power system vertically from distribution to market to optimize power system operation.
4.3.2. The Netherlands
“Resourcefully”, the Amsterdam-based environmental consultancy, released the “Amsterdam Vehicle 2 Grid” project (Figure 6a) in 2013 to interconnect EVs, solar energy generation, and individual customers via the smart grid and household information management system [68]. Taking advantage of the V2G system, Resourcefully presented the following results to the public:
- The energy self-sufficiency was significantly increased, so the zero-emission energy autonomy of participants was improved (from 34 to 65%);
- The frequency of energy exchanges between participants and the grid was significantly reduced (by 45%);
- The utilization efficiency of electrical energy storage capacity reached 93%;
- The loss of energy due to conversion throughout the process of storing energy into DC batteries and regaining power from them amounted to 80%;
- The battery capacity consumption for the two-year use was negligible (6~7%).
4.3.3. The U.S.
SolarCity, the subsidiary of Tesla in the solar industry, launched two services in 2016: the solar roof and the Powerwall 2 storage system [72,73]. The solar roof generates electricity continuously when sunlight is available. The Powerwall 2 storage system (Figure 6b) could store electricity from any source, including solar power devices such as the solar roof and generic electricity grids. Customers are allowed to use it at night or during grid breakdowns and even sell it back to grid operators at more substantial prices. Statistics show that the Powerwall ($6200) provides a one-time storage capacity of 14 kWh hours [74].
4.3.4. Japan
Japan takes the lead globally in the EV industry, and the involved departments have developed a V2H standard called the EV Power Supply System Association (EVPOSSA) to promote the industry and standardize product specifications. In addition, numerous companies are deeply involved in V2H technology, including Nissan, which has created commercial products based on the technology. In 2016, Nissan and multinational Enel launched a joint V2G pilot project in the UK, which equipped 100 V2G systems for Nissan LEAF and e-NV200 models, enabling their owners to profit by selling electricity from their onboard batteries to the grid [75]. Moreover, Nissan launched the Leaf model with V2G capability (Figure 6c) in 2017.
4.3.5. Hong Kong
According to the Japanese EVPOSSA V2H standard, the Hong Kong APAS has designed a multifunctional integrated product called the Smart V2H System as shown in Figure 6d. Under the control of the EV Power System (EVPS), the electricity stored in EV and household batteries, the power from the grid, and the renewal power source could be converted and transmitted to some others following the EVPOSSA V2H/V2L standard. The DC/DC converter in EVPS realizes power transmission between the household and EV batteries. The DC/AC inverter enables the energy supply to household appliances from household batteries and EV batteries. The Household Battery Power Storage System obtains energy from the solar power system as well as the EV battery for powering the household according to the need. The Solar Power System consists of panels and a DC/DC converter that store green energy into the household battery. Specifically, the DC/DC converter is assembled with a Maximum Power Point Tracking (MPPT) capability to maximize solar energy capture. APAS has implemented mature V2L/V2H functionality through the Smart V2H System based on the EVPOSSA protocol. In the future, APAS plans to develop V2G technology based on V2L/V2H projects and further adapt the system with more comprehensive V2H/V2G standards according to market demand.
4.4. Prospects
Prospects for future V2G and V2H development were provided from a commercial and technical perspective as follows. In general, the development of future V2G and V2H technologies includes two main directions, namely integration with smart electricity grids and retired EV batteries.
4.4.1. Integration with Smart Electricity Grids
Smart grids could avoid blind decisions not matching the reality via real-time monitoring technology, and better coordinate the service demands of grid operators, different generation sources, and end-users, minimizing operating costs and environmental damages while maximizing system efficiency and flexibility [76,77]. The storage of surplus energy and demand-driven dispatch across time scales will be essential aspects of grid intelligence; thus, the demand for battery devices capable of storing local energy or online energy will continuously expand. Given the appreciable development prospects of EVs, onboard batteries are expected to play a significant role in providing essential energy storage capabilities for grid intelligence [78].
4.4.2. Integration with Retired EV Batteries
The inherent property of batteries is that the capacity will gradually decrease over time and cycles. Previous research has demonstrated that when the remaining storage capacity of onboard batteries is less than 70–80% of its designated storage capacity, it will be obsolete for the inability to sustain the duration and mobility of EV driving [79]. However, the usage of secondary batteries as stationary storage for smart grid will undoubtedly extend the life cycle of onboard batteries and enhance resource utilization. Nissan, in collaboration with Enel and Eaton, is conducting a project at its regional office in France to integrate secondary batteries into a V2G system, consisting of 100 bidirectional chargers for V2G following CHAdeMO protocol and an energy storage subsystem combining more than 60 “second life” batteries with solar power generation [80]. The 1 MWh of energy stored in this system combined with the 1–2 MWh of energy stored in the EVs at nearby lots provides an adequate energy storage capacity for the appliances. The project demonstrates a solution for integrating the secondary battery with the V2G system and utilizing its residual storage capacity.
4.4.3. Future Challenges and Opportunities
Challenges and opportunities in the future development of V2G and V2H technologies for EVs are summarized in Table 3.
5. Connected Vehicles
5.1. CV Technologies
Integrated with three networks: intra-vehicle network, inter-vehicle network, and onboard mobile Internet, the CV, also known as the “Internet of Vehicles” (IoV), is intrinsically a large distributed communication system for V2X interaction, where X involves other CVs, individuals, and networks [82]. As a profound scenario for the application of the Internet of Things (IoT) in the intelligent transportation system (ITS), the CVs enable a multifunctional network that supports intelligent transportation management, intelligent dynamical information services, and intelligent driving control [83]. The information exchange process follows specific communication protocol standards such as the IEEE 802.11p WAVE standard or cellular data protocols [84]. Typical CV systems are equipped with interfaces to WiFi or cellular networks (GSM, HSDPA, LTE, or 5G expected to be fitted on a large scale) and other short-range communication technologies [85]. When the vehicle is connected to the network, it has access to numerous cloud information services, such as instant emergency calls, real-time navigation, and media amusement, as exhibited in Figure 7. As the communication gateway, the global vehicular ID (GID) terminal is undoubtedly the technological key of the CV [86]. With integrated information sensors, the network communication module, and global online identification (an “online vehicle plate”), it allows the vehicle to have worldwide network connectivity and global positioning and tracking capabilities [87].
5.2. Benefits and Business Opportunities
The IoV can be applied to various vehicle models and powertrain systems, but it has a more significant role in the field of EVs, mainly in the aspects of charging management and parking reservations, fleet management, predictive maintenance, driving behavior analysis, insurance, traffic control, and infotainment.
5.2.1. Advantages in EVs
Connectivity is not a technology unique to EVs; it is beneficial to all types of powertrains. This technology can provide vehicle owners with real-time service information, keep the in-vehicle software system up-to-date, and facilitate real-time monitoring of vehicle operating status and handling of traffic accidents and insurance issues, preventing costly recalls and repair charges. Vehicle connectivity plays a greater role and has greater advantages in EVs than other power systems. First, the IoV system can monitor and manage the operating parameters of EVs in real-time through the wireless communication network, which will be an important technical means and the most practical resource to improve the safety of EVs, especially the safety of onboard batteries [89]. Second, the energy efficiency of EVs will be continuously optimized by employing Big Data technology to improve the economy of EV operation. Third, easy access to charging piles and smart charging management can be realized through the IoV technology, thereby increasing consumer attractiveness. Finally, unlike the traditional ICE systems, the operation of EVs is highly dependent on software control, and it is difficult to obtain sufficient accident information through mechanical parts after a car accident. The IoV technology provides abundant maintenance and insurance information acquisition and processing convenience for EVs after an accident.
5.2.2. Charging Management and Parking Reservations
IoT technology is gradually introduced for intelligent parking management to upgrade the service mode. On the CV-side, the guidance application will display the operation status information of nearby parking lots to drivers. Then, the multi-attribute decision algorithm will screen the candidate parking lots and select the optimal parking spot based on the collected personalized information of driver demands, such as power-charging demand and expected parking duration [90]. Meanwhile, the online reservation and guidance function will significantly save drivers’ time and alleviate parking congestion. On the parking server-side, the parking management system will automatically process the reservation requests from nearby drivers and report the violation status of the parked vehicles, so that the service staff can implement predictive management and handle the violation easily [91].
5.2.3. Fleet Management for Commercial EVs
Fleet management involves vehicle finance management, vehicle dynamic maintenance, vehicle Telematics (real-time tracking and trouble-shooting), and the management of speed, driver, fuel, and safety. The location information, health information, and fuel storage of individual vehicles will be fed back to the cloud-based server of the central management system in real-time for decision processing and real-time dispatching to maximize the efficiency of the logistics network operation and maintenance [92]. The vehicle database will record the health index, violation, and insurance status of specific vehicles, while the driver database will record the average speed, lane change frequency, operation specification, and gear change frequency of particular drivers. Rational analysis of the Big Data formed by the recorded parameters can optimize fleet management significantly [93]. When a malfunction or accident occurs, the real-time recorded vehicle damage status and pre-accident maneuvering data can assist the relevant departments in quickly determining accident liability and insurance payouts [94].
5.2.4. Predictive Maintenance
For private vehicles, the after-sales service department will notify the vehicle owners of predictive maintenance based on information such as usage time. Once positive feedback is received from the owner, information about the health of the vehicle components and diagnostics will be uploaded to the after-sales service department for a customized maintenance strategy, allowing the owner to choose the service and order the spare parts to be replaced [95].
5.2.5. Driving Behavior Analysis
Big Data algorithms can comprehensively analyze and evaluate vehicle condition and driving behavior based on the vehicle and driver information tracked and recorded by the Telematics system [96]. Further, the system will alarm drivers of bad driving behavior and recommend targeted vehicle insurance items and active safety applications to reduce driving risks and traffic accidents [97].
5.2.6. Insurance
As mentioned in the previous section, driving behavior data can be used to provide targeted reference to vehicle insurance items for specific drivers. Meanwhile, some business chances will be created for insurers, such as Usage-Based Insurance (UBI) in the form of “Pay-As-You-Drive” (PAYD) and “Pay-How-You-Drive” (PHYD) [98,99]. Originally designed to capture information to improve insurance security levels and billing profit, the widespread introduction of UBI positively saves lives and protects the environment [100]. The PAYD item evaluates drivers based on the quantity of driving. Similar to the mileage charge of taxicabs, the insurance premium for this variant depends on the amount of driving. The PHYD item, however, evaluates drivers according to the quality of their driving, meaning that the insurance premium is calculated based on the frequency of aggressive behavior and irrational decisions made by the driver, as analyzed by driving behavior data [98]. Unfortunately, when the accident or crash occurs, the damage state and pre-accident manipulating data can also assist the insurance carriers in calculating the proper payout.
5.2.7. Traffic Control
The in-vehicle device can present drivers with real-time traffic conditions nearby and traffic images of major roads and automatically recommend the optimal driving plan to improve the efficiency of traffic operation [101,102]. Meanwhile, the position and speed of each vehicle will be uploaded to the cloud synchronously, ensuring the real-time and accuracy of traffic information in the area. Especially for vehicles driving on highways, this technology will significantly reduce the probability of accidents.
5.2.8. Infotainment
CVs will completely disrupt the current situation where in-vehicle entertainment is limited to FM and Bluetooth. The spread of high-speed networks has dramatically increased the speed of information transmission, making it possible for high-bandwidth streaming services to take over the in-vehicle entertainment market, meaning that passengers will have more mainstream digital service options, such as audio-visual interaction [103]. Today, Apple and Google are competing to create a general software platform that adapts to in-vehicle hardware in order to capture the underlying core of that market. In addition, Android Auto allows drivers to access favorite apps, purchase rented media services, and synchronize Google Play music.
5.3. Technological Developments
The representative products of IoV technology in different countries and regions are as follows.
5.3.1. eCall
The eCall is an alarm system initiated in Europe that can automatically provide assistance information to the emergency service station after a traffic accident or a crash [104,105]. The in-vehicle eCall using E112 wireless communication technology can be triggered manually by in-vehicle passengers pressing a button or independently after the sensor senses a collision, and then communication between the vehicle passenger and the nearest professional operator of the emergency service station will be established. Meanwhile, a data package rich in information about the accident will be automatically sent to the operator, including the time, precise location, vehicle plate, eCall triggered mode, and information about the relevant emergency service providers. Since January 2015, the I_HeERO project has been launched in Europe to construct the required Public Safety Answering Points (PSAP) facilities to introduce pan-European eCalls [106]. The project is hosted by over 10 EU member states and over 100 relevant partnerships. Its primary contents include:
- Promoting investment in PSAP infrastructure and service interaction projects in EU member states;
- Advancing the preparation process for the universalization of eCall for vehicles with a high danger ratio, including chemical goods vehicles, long-term passenger carriers, and Powered Two-Wheeled machines (PTWs) [106];
- Promoting the development of data management and E112 call technologies and assessing the operational feasibility of PSAP infrastructure. In particular, Luxembourg achieved the criteria of feasibility assessment in 2017 and became the first member state to implement eCall.
The EU required its member states to establish the necessary PSAPs infrastructure to handle eCalls by 1 October 2017, and all the new car and light-duty truck models in Europe must be equipped with eCall devices from 31 March 2018 [107]. Researchers claim that the eCall system can reduce emergency response time by 40% within cities and 50% within rural regions.
5.3.2. OnStar
OnStar is a sub-company of General Motors (GM) that specializes in providing various in-vehicle services based on a Code Division Multiple Access (CDMA) and is also the symbol of a series of functions equipped by GM [108,109]. These include:
- Emergency services—auto-collision response, weather forecasting, crash rescue, and curbside assistance;
- Security services—remote ignition control, theft alerts, and stolen vehicle deceleration;
- Navigation services—regional road condition synchronization and optimal route planning;
- Connectivity services—OnStar 4G LTE, Wi-Fi, Bluetooth hands-free, and adaptability of 3rd party apps;
- Vehicle management—vehicle condition detection, remote access, location tracking, and intelligent driving.
When the system is triggered manually by a button or automatically by an airbag-detection device, OnStar will collect relevant data based on the onboard diagnostics and built-in GPS and use the CDMA for communication and database transmission [110]. The first OnStar units were deployed in a variety of Cadillacs introduced in 1997, with expansion to other models beginning in 2002. In 2012, stand-alone units were designed to customize individual services, which are now available in the United States, Canada, China, Europe, etc.
5.3.3. Mainland China
In 2016, BAIC EV, a renowned vehicle company in Mainland China, launched “I-link”, the first intelligent Internet-connected system in China to apply 4G communication technology for interaction between in-vehicle terminals and the cloud. In addition, I-link realizes the first onboard system to integrate voice recognition technology, infotainment technology, and a cabin unified information board in Mainland China, allowing drivers to remotely access query and alert services. BAIC’s breakthrough in Telematics technology has changed the situation that traditional CVs were limited to the preliminary integration of the Internet, broadening the scope of Internet resource interaction through various sensor technologies to create a better user experience for vehicle passengers [111]. Meanwhile, other auto brands in Mainland China are strengthening cooperation with information technology companies to advance CV development further.
5.3.4. Hong Kong
In the Smart City Blueprint Consultancy Study Report published in June 2017, the Hong Kong Government proposed the following strategic measures for smart mobility involving CVs [112]:
- Developing “in-vehicle units” (IVUs) that enable drivers to access traffic information in real-time and pay for their driving remotely via it instead of using toll booths;
- Installing approximately 1200 traffic detectors on all critical links by 2020 to provide instant and accurate traffic information;
- Public participation in developing a specific Electronic Road Pricing (ERP) trial program to be implemented in the midlands and nearby regions in 2019;
- Gradually introducing intelligent traffic signal systems with pedestrian and vehicle detectors at intersections starting in 2021;
- Implementing the auto toll system in the new Tseung Kwan O-Lam Tin Tunnel for trial by 2021, upon approval of the supporting legislation approved by the Legislative Council;
- Taking forward the trial implementation of self-driving vehicles in the West Kowloon Cultural District and other regions;
- Encouraging transportation service providers to adopt e-payment for transportation and focusing on system reliability, client orientation, and operational efficiency;
- Encouraging transportation service providers to share their service data with relevant authorities;
- Developing technologies to deter inappropriate use of load/unload zones and illegal parking starting in 2018;
- Experimenting with crowd control systems to enable the detection of pedestrian and vehicular traffic during large-scale activities;
- Publishing instant traffic information about licensed buses via mobile devices by 2018 and installing real-time traffic screens at transportation interchanges and over 1300 bus stations by 2021;
- Establishing new types of on-street parking meters that can provide available space information in real-time and allow for multiple forms of payment, including app-based remote payment, from 2019 or 2021;
- Encouraging existing public parking operators to upgrade infrastructure that can provide available parking space information in real-time and enacting feasible measures that appeal to new public parking lots to be equipped with this capability.
5.4. Prospects
The future development of CVs should mainly focus on empowering technology development and data analytics, which are described in detail as follows.
5.4.1. Empowering Technology Development
The popularization of CVs depends on a secure and reliable network environment, which is mainly reflected in the stringent requests for network speed and security. Regarding network security, a reliable Telematics environment is necessary, as vehicles are involved in the human safety of traffic participants. As soon as a vehicle accesses the Internet, it opens up new attack chances for offenders. Its security risks are mainly centered on five areas: CV, V2X communication, information security, smart devices, and service providers, the first three of which are primarily concerned with vehicle-side security [113]. CV cyber security involves the Telematics Box, the Controller Area Network bus, the Electronic Control Unit, in-vehicle operating system, onboard diagnostic, and In-Vehicle Infotainment system [114]. The networked vehicle may be attacked via wireless firmware upgrades, unlawful data infusion, appliance accessibility, etc. [115]. Therefore, a qualified CV should include safe bootloaders, secure network communications, partitions or firewalls between vehicles-side and cloud-side, software security updates, security defense, abnormality monitoring, intrusion prevention, data cryptography, and backup after updates fail. V2X communication network security involves various communication methods such as Wi-Fi, Bluetooth, cellular networks, satellite communication, LTE V2X, and Dedicated Short-Range Communication (DSRC). The diversity and variability of network communications make it extremely difficult to detect and defend against network attacks. Therefore, a V2X system should have a range of functions such as encryption and decryption, signature production and certification, authentication, and data privacy checking [116]. Data security is of great importance, as illegal tampering with traffic management data and vehicle operation data will directly threaten the lives of drivers and other traffic participants [117]. Therefore, vehicle manufacturers should set up stringent data standards, focus on enhancing the privacy management level of data, and tightly control the disclosure of sensitive data.
Since traffic behavior has high real-time requests, except for the possibility of data privacy leakage and hacking, the communication speed of Telematics is another technical barrier to CV development. The ultimate solution for CVs will be 5G, due to its extremely low latency, higher band frequencies, more connection capacity, and higher security [103]. The 5G network has a throughput of up to 10 GB per second and a latency rate about ten times lower than traditional LET networks [118]. Many countries’ research departments are currently focusing on 5G upgrades to their networks, with Mainland China leading the way to launch 5G commercial services in October 2019. Statistics forecast that 67 million vehicles will be available for 5G services by 2025. Based on 5G networks and more reliable security strategies, CVs will witness a surge phase of development and create unprecedented opportunities for participants in transportation matters:
- Vehicle information online management systems, assisted by annual inspection and monitoring, can identify the operational status of vehicles remotely, including vehicle and driver license validity, vehicle violation records, and illegal modification status, which can significantly cut vehicle maintenance costs and improve traffic safety;
- Vehicles can be registered with an online ID in the form of a quasi-real name, significantly reducing fake registration, smuggling and illegal modifications, and other illegal operations. In addition, vehicle IDs can be readily bound to the owner’s credit account and payment information, strengthening the coupling between the physical and the network world to enhance the overall information security and reliability;
- New in-vehicle and mobile-side intelligent terminal software and hardware industries will be spawned, prompting the CV to become an irreplaceable large mobile device integrated into mobile Internet life. Intelligent terminals should have specific human–machine interfaces and be adapted with in-vehicle display hardware to synthesize mobile payment terminals. In addition, they should also have intelligent cloud services based on Telematics, such as intelligent traffic, real-time localization, remote diagnostics, and GID.
5.4.2. Data Analytics
Nowadays, vehicle manufacturers can easily collect a large amount of data through V2X and store it on cloud storage. However, Big Data analytics are essential for extracting information regularities and generating business value from it. A reasonable analytic model automatically filters out irrelevant or even distracting factors while retaining the strongly relevant ones. Big Data analytics are accurately measured using the four Vs: Volume, Variety, Velocity, and Veracity [119]. All aspects associated with Telematics, such as position information, electronic trading, human intercourse, business substance, sensors feedback, and e-devices, are internal or external sources of Big Data [120]. Through the rational extraction of valid information, vehicle manufacturers can not only adjust their products accordingly to satisfy user needs better and optimize the operation of services, but also discover new business opportunities to expand service models. The main benefit channels are as follows:
- Promoting the development of intelligent transportation: vehicle information and customer feedback will enable product managers and R&D teams to formulate a reasonable product upgrade route;
- Improving customer stickiness: analyzing specific user preferences based on stream data and customer information, and customizing information and service delivery using predictive models;
- Optimizing comprehensive vehicle health management: based on vehicle data streams, conducting model analysis to provide more accurate and timely warnings, thus giving valuable suggestions for predictive maintenance;
- Upgrading after-sales services and local inventory: using real-time vehicle location information to match the appropriate after-sales sites to provide customized repair services and avoid blind inventory accumulation.
5.4.3. Future Challenges and Opportunities
Challenges and opportunities in the future development of CV technologies for EVs are summarized in Table 4.
6. Autonomous Driving
6.1. Autonomous Vehicle Technologies
Autonomous driving can be divided into multiple levels according to its degree of automation, of which the most acceptable definition is from SAE. The realization of autonomous driving involves complex technologies in multiple disciplines, and even perception is the key to its realization.
6.1.1. SAE Standards
6.1.2. Sensory Technology
Advanced sensory technology is one of the most critical factors in realizing autonomous driving. In order to popularize autonomous driving, the vehicle itself is required to enhance the maneuverability of a human driver. The combination of different sensors can enable the vehicle to outperform humans in terms of visionary perception of the environment. The installation positions, coverage and maximum range of typical sensors for environment perception in an autonomous vehicle are displayed in Figure 8a,b.
The existing sensory technologies for automated driving can be principally divided into six categories:
- (a)
- Ultrasonic sensors
Sensing range: 0–2 m.
Ultrasonic sensors in vehicles play an irreplaceable role in implementing automated parking, as they can detect obstacles within short distances, such as guardrails, pedestrians, vehicles, etc. [124]. However, they will be useless in medium- and high-speed situations.
- (b)
- Computer vision
Sensing range: 0–120 m.
Multi-cameras can approximate human vision, and stereo cameras can even obtain depth information about the environment. The cameras can detect colors and fonts, which makes it possible to understand the semantic information embedded in traffic signs and stoplights, a capability that other sensors do not have [125]. They can perform as a redundant system in case of failure of other sensors, thus increasing the reliability of perception and system safety. However, the perception requirements for expected autonomous driving can only be met when the visibility range is increased to 250 m [126]. Adverse weather, such as rain, fog, and low light levels, can significantly limit the perception effect of such sensors. The recognition algorithm based on such sensors has yet to be developed, with the current pedestrian recognition success rate at 95% [127].
- (c)
- Radio detection and ranging (radar) sensors
Sensing range: 0–250 m.
Radio waves emitted by radar transmitters will be reflected to the receiver when encountering obstacles. The distance and relative speed between the sensor and the obstacle can be calculated through the time difference. Specifically, if short- and long-range radar sensors are installed at the periphery of an autonomous vehicle, they will monitor the real-time position and speed of surrounding objects, including vehicles and pedestrians [128]. However, 2D radar, which can scan only in the horizontal plane, cannot reconstruct the height information of obstacles, so collisions may occur when the vehicle travels on a height-limited road [129]. 3D radar sensors will be applied to solve the problem.
- (d)
- Light detection and ranging (LIDAR) sensors
Sensing range: 0–200 m.
The LIDAR sensor follows the same principle as the radar sensor but uses an invisible beam instead of radio waves as the scanning medium [130]. Combined with onboard camera data, the sensor can create the 3D point cloud around the vehicle to accurately identify obstacles, such as the presence of vehicles, pedestrians, and signage (Figure 9a). However, LIDAR is more expensive than radar due to its complex mechanical structure, difficult calibration, and high cost of laser scanning components [131]. The gradual development of solid-state LIDAR is expected to sink the price to an acceptable range.
- (e)
- Odometry
Wheel speed odometry uses a rotary encoder to record wheel rotation to estimate the position change relative to the initial point [132]. However, wheels are not in pure rolling motion to the ground at all times and may slide when driving on smooth roads or during sharp changes in speed. Sliding which cannot be recorded will cause cumulative errors, so the reliability of odometry will gradually decrease over time. Visual odometry attempts to analyze the frame-to-frame movement of the image to estimate the position and speed of the vehicle (Figure 9b), so it is not limited by the form of the motion to the ground [133].
- (f)
- GPS and cloud technology
The vehicle can use GPS for accurate localization, contribute the location to the cloud in real-time, and obtain the surrounding environment conditions from an electronic map [134]. Multi-vehicle contributions will ensure the real-time and accuracy of data, such as broadcasting congested road conditions or traffic faults ahead to help other vehicles plan their path. However, this solution highly depends on the number of vehicle nodes that can contribute real-time information, making it difficult to achieve “crowd intelligence” in rural areas with low traffic density [135].
![Energies 15 06271 g008]()
Figure 8.
(a) Positions of the sensors installed on an autonomous vehicle [136]; (b) Coverage and maximum range of various sensors for environment perception in autonomous vehicles [137].


6.1.3. Control Technology
Intelligent control systems infer proper path planning according to road signs, obstacles, and the behavior of other traffic participants, based on understanding large amounts of sensor data. Although the technical means differ, most autonomous vehicles maintain a local map of surroundings in real-time, then use algorithms to identify appropriate paths and send corresponding commands to end-effectors for lateral and longitudinal vehicle control. Hard-coded rules, obstacle avoidance algorithms, decision models, and recognition algorithms will ensure that the planned path avoids obstacles while following traffic rules [140]. If the control system cannot calculate a uniquely determined navigation path, no solution, or multiple solutions, partially autonomous vehicles will throw an exception to notify the driver to take over. Autonomous vehicles can be distinguished by whether or not they are “connected”, indicating whether they are capable of communicating with other vehicles and intelligent traffic facilities [141].
6.1.4. Telematics Technology
Telematics is compounded by the terms “telecommunications” and “informatics”. Generally, Telematics is every application of telecommunications that integrates information exchange and services technology. As a technology covering everything about GPS and navigation systems, it can send, receive, and store information related to remote items—such as vehicles—through telecommunication devices [142]. Telematics systems help insurance companies predict traffic dangers based on recorded human driving behavior and readily identify valid and independent safety features [143]. Telematics technologies used in autonomous driving include mobile networks, for example, 5G and LTE, and global navigation satellite systems such as GPS, Galileo, and BDS [144]. As described in the previous section, “GPS and the cloud”, the high accuracy of real-time positioning guidance from GNSS and traffic information from the cloud will ensure that the vehicle drives to the destination accurately and quickly, following the optimal path.
6.2. Benefits and Business Opportunities
There is a general question, does autonomous driving technology have to be integrated with EVs? The answer is “no”, or more precisely, “not yet”. Mass-produced autonomous vehicles will likely be powered by conventional ICE. However, six valid reasons are given here to indicate that integrating electric drive technology with autonomous driving technology is the future trend.
6.2.1. Two Innovations at the Same Time
Innovations in automotive technology are often costly and tend to be applied first in premium vehicles. Early adopters who afford high product premiums generally focus on “technology differentiation” as the incentive to buy, meaning that they expect automakers to integrate as many innovations as possible, such as electric drive and autonomous driving technologies. With these products getting more affordable due to the declining cost of the innovations, the original product demand of early adopters will be extended to the mass market.
6.2.2. Easier Implementation of Autonomous Features on EVs
Since autonomous driving technology involves a large number of onboard sensors with high-performance computing hardware, it places higher demands on the vehicle’s electrical subsystem. Currently, conventional ICE engines generally use a 12 V electrical system provided by lead-acid batteries. In contrast, EV battery packs can undoubtedly provide an adequate power supply and more flexible voltage regulation, meaning that EVs will provide increased freedom to deploy autonomous driving technology. It is much easier to control the battery pack and electric motor than ICE with thousands of mechanical parts and complex wiring. Due to these advantages, autonomous driving R&D companies, including GM, Nissan, and Google, have used EVs as a starting platform for deploying autonomous driving technology.
6.2.3. Seamless Integration of Wireless Charging with Autonomy
Autonomous vehicles powered by conventional ICEs have difficulties in refueling and need the intervention of drivers, services, or intelligent robots, whereas wireless charging accessories produced by many companies already commercially available will solve the problem perfectly. Autonomous vehicles can drive to available parking spots and adjust to the optimal angle to ensure the charging receiver matches the pre-set wireless charging transmitter perfectly, maximizing wireless charging efficiency. Further, autonomous vehicles will achieve “opportunistic charging”: charging between driving behaviors to maintain a high battery level rather than awaiting a depleted battery [145].
6.2.4. Extension of Driving Range by Autonomy
The most significant challenge to the development of EVs is “range anxiety”, which is why all EV manufacturers are keen to introduce any technology that can extend driving range [146]. Predictions indicate that autonomous driving technology is expected to extend the driving range by 5% to 10% without hardware upgrades due to the smoothness of acceleration, deceleration, and steering enabled by advanced predictive models and decision algorithms [147]. While the accurate rate has to be further quantified based on experimental data, it does not hinder the allure of the prediction. Thus, automakers could invest in autonomous driving technology to alleviate EV “range anxiety” (same price, more extended range) or sink production costs (same range, smaller batteries).
6.2.5. Simultaneous Maturity
EVs and related infrastructure are not yet as broadly available. Fully autonomous driving is far from commercial application and yet both technologies are steadily advancing. As battery technology continues to develop, its cost per unit capacity is gradually sinking, facilitating the expansion of the EV market [148]. The iterations of sensors and software algorithms make it possible to optimize the autonomous driving experience at the exact cost, and gradually approach the direction of fully autonomous driving [149]. Therefore, the temporal synchronization of the two technologies’ evolution will prompt them to integrate and promote each other.
6.2.6. Simultaneous Mandate by Governments
As fossil energy sources become depleted and environmental issues become increasingly severe, it is foreseeable that government mandates will intervene in the production and sale of ICE vehicles. In fact, several governments worldwide have already discussed and initially developed timetables for when to prohibit the production and sale of ICE-powered vehicles. Meanwhile, when autonomous driving technology is undoubtedly proven to improve driving safety, governments may likewise mandate the technology as a necessary feature for vehicle production, such as airbags, ABS, and electronic stability control. The government may mandate both technologies in the future, thus creating a significant policy impetus for integration.
6.3. Technological Developments in EVs
Countries such as the U.S., South Korea, Singapore, and China have made active explorations in the field of autonomous driving of EVs and achieved some important results. The following introductions can serve as a microcosm of the development of autonomous driving for EVs, and provide guidance for the exploration and development of other emerging markets.
6.3.1. The U.S.
In 2009, Google began its involvement in autonomous driving and launched a related R&D project. In 2016, the project was expanded into a subsidiary called Waymo, which developed into the Alphabet autonomous driving department later [150]. In 2019, regulators in California approved Waymo’s proposal to carry passengers in its developed vehicles (Figure 10a). In 2016, Uber reached an agreement with Volvo to purchase 24,000 of its autonomous vehicles over three years starting in 2019 after testing prototypes of autonomous vehicles supplied by the company [151]. In June 2019, Uber launched its third-generation autonomous driving vehicles and planned to begin piloting the new vehicles on public roads in 2020. In January 2020, institutions in the U.S. jointly announced “Ensuring American Leadership in Automated Vehicle Technologies: Automated Vehicles 4.0”, which is based on AV 3.0 and aims to strategically lead the future of the transportation industry, and extended the scope to 38 U.S. government departments with direct or indirect interests in safety development and AV technology integration.
6.3.2. South Korea
South Korea has invested heavily in a 3.45 million square foot test city called “K-City” in Hwaseong, Gyeonggi Province, covered with 5G network communications and equipped with rich urban scenarios such as four-lane highways and automated parking lots (Figure 10b). The launch of K-City, especially the highway, could provide the infrastructure to underpin the plan to commercialize Level Three autonomous vehicles. South Korea’s Ministry of Land, Infrastructure, and Transport announced security standards for operating Level Three autonomous vehicles in 2019. The government plans to achieve fully autonomous driving by 2030. It should construct and maintain the necessary communication and transportation infrastructure soon and bring both Level Three and Level Four autonomous vehicles into actual commercial use by 2027 at the latest. Related auxiliary systems, such as insurance agencies and performance assessments, will be available by 2024, together with telecommunications, traffic control, high precision maps, and other infrastructure to greet the era of fully autonomous vehicles. An open and shared autonomous driving industry backed by over 60 trillion won will be created, of which two-thirds of the funds will be provided by the Hyundai Motor Group.
6.3.3. Singapore
The Singapore government hopes to achieve a leading global technology for autonomous vehicles in the country. In 2017, the Ministry of Transport issued an array of regulations on self-driving vehicles, known as the AV Regulations, to support innovative experiments in autonomous driving. Singapore has become the first country worldwide to implement autonomous driving on a large scale, with the amendment to the Traffic Roads Act that makes it unnecessary to have a driver in a motor vehicle. The Ministry of Transport has established a regulatory environment for self-driving vehicles that is effective until 2022. However, it will continue to extend the regulatory sandbox or develop related permanent legislation to support autonomous driving. To contribute further to the growth of the self-driving vehicle industry, the Centre of Excellence for Testing and Research of Autonomous Vehicles was established to simulate natural traffic conditions, equipped with buildings, bus stops, signals, rain-making machines, etc. (Figure 10c). In addition, for non-peak travel and as-needed commutes, it plans to conduct live road tests of autonomous buses and shuttles in some regions, such as Tengah, Punggol, and the Jurong Innovation District, starting in 2022. The Land Transport Authority has decided to expand its scope of testing to satisfy companies’ needs for technological testing in more diverse transportation scenarios. It is foreseeable that all of western Singapore, containing over 1000 km of public roads, will be incorporated into the testing platform for autonomous vehicles, making it possible for corporations to test AVs in street blocks. The rich test set will comprehensively assess the robustness of current autonomous driving technologies and facilitate their upgrade to reach the security thresholds for long-distance inter-town travel, further laying the facilities and technology foundation for the development plan of autonomous vehicles in the early 2020s.
6.3.4. Mainland China
Chinese Internet leader Baidu announced in 2017 that it was collaborating with several companies in the autonomous driving field. As a pioneer in the autonomous driving industry in Mainland China, Baidu is jointly developing autonomous driving technology with automaker BMW and has set up test points in many regions, such as Shanghai and some cities in Anhui and Zhejiang. In the same year, Baidu launched a program, ”Apollo”, to provide new partners in the autonomous driving field with an open and secure software framework to assist them in integrating vehicle and hardware systems to build customized autonomous driving systems rapidly [157]. Figure 10d shows an autonomous test vehicle from Baidu. Baidu has also created an autonomous vehicle consortium and declared its intention to put autonomous vehicles on the road. In 2019, as expected, Baidu provided a commercial autonomous driving project in Hunan province, with an initial scale of 45 vehicles to conduct autonomous cab services on a 50 km-long public road. The Chinese government is eager to complete the economic transformation from a heavy and low-end manufacturing-driven economy to a high-tech and consumer-sector-driven economy. Therefore, recognizing the huge commercial potential of autonomous driving, it has developed several policies to support Mainland Chinese companies’ participation in the global competition for autonomous driving technologies. UISEE is another leader in commercializing autonomous driving in Mainland China, with its fully autonomous vehicle demonstrated at the Consumer Electronics Show 2017, and installing many sensors, such as stereo cameras, millimeter-wave radars, laser radar, and ultrasound sensors (Figure 10e). Intelligent algorithms integrated with deep learning could integrate data from each sensor into planning and decision models and combine with expert systems with self-learning and predictive functions to bring passengers a comfortable and secure driving experience. UISEE has developed prototype autonomous driving products for short commutes in relatively closed environments, including shuttles and sightseeing buses, and has already gotten practical testing at Guangzhou Baiyun International Airport. In 2019, UISEE put autonomous logistics vehicles into service for baggage transportation at Hong Kong International Airport.
Responding to the government’s guidance, the “Intelligent Networked Vehicle Road Test Management Specification (Trial)” was released to provide legal-level support for organizations to conduct autonomous vehicle road tests. Subsequently, 16 test points were established in Beijing, Shanghai, Chongqing, Wuxi, etc. In 2019, in order to build a healthy partnership, 16 test points signed a joint initiative regarding improving the security of intelligent networked vehicles, promoting vehicle–road cooperation, improving the efficiency of testing and evaluation, and enabling data sharing.
6.3.5. Hong Kong
Autonomous driving in Hong Kong is in its infancy. The Smart City Blueprint Consultancy Study Report released in 2017 proposed to “facilitate trials of autonomous vehicles in the West Kowloon Cultural District and other areas as appropriate”. Researchers in Hong Kong installed an autonomous driving system on a golf cart with the ability to sense its surroundings, making it the first autonomous vehicle in Hong Kong. Hong Kong does not yet have specific and appropriate regulatory legislation for autonomous driving functions. With Tesla, for example, the lane-changing and assisted steering functions are only allowed on particular roadways with medians and limits above 70 km/h, while the “summon”, which remotely navigates the vehicle into and out of parking spaces, is strictly prohibited. Meanwhile, its autopilot function is forbidden in most urban areas, and drivers are only authorized to enable it on high-speed roads and tunnels. In 2017, the Hong Kong Science and Technology Parks Corporation gathered technology startups and automotive companies Scania and Inchcape to create an intelligent mobility ecosystem to incubate smart transportation technologies. However, to carry out a trial project involving autonomous vehicles in the Science Park, one must first apply to the Ministry of Transport with details such as time and location to get the vehicle movement permit before conducting it on-site.
APAS and HKPC are enhancing the development of autonomous driving technology to facilitate local enterprises in Hong Kong to seize emerging business opportunities created by intelligent transportation. In 2018, with the support of the Innovation and Technology Commission, an independent R&D platform was created for autonomous vehicles to provide hardware support for future technology development and application (Figure 10f). In 2019, the Technical Advisory Committee on the Application of Autonomous Vehicle Technologies was established, composed of experts from relevant research institutions and industries, to promote its further development in Hong Kong. The committee will discuss how to develop a regulatory framework for autonomous driving with complete legal support, considering the experience of local pilot projects. However, the Hong Kong government has continued to severely restrict road testing of specific autonomous vehicles in the territory through the case-by-case application policy.
6.4. Prospects
Fully autonomous planning and execution of all driving behaviors without intervention mean that autonomous vehicles must be equipped with extremely robust and safe technologies. Before that, several significant and inter-coupled challenges must be addressed.
6.4.1. Immature Technology and Business Models
While technicians are ramping up to develop commercially available autonomous vehicles, there are few perspectives on the organization in which these vehicles will be utilized in the future. What role will autonomous vehicles assume in future transportation operations? Will users pay for the delivery service or vehicle ownership? If mobility-sharing companies could “service” vehicles to eliminate their individual characteristics, the entire business model of the industry would be subverted. Passengers will no longer focus on the type of vehicle they travel in but only on whether they move from place A to place B.
6.4.2. Regulation and Legislative Framework
A robust regulatory and legal framework plays an essential role in the continuous evolution of autonomous driving technology. An effective regulatory framework enables companies to evaluate the legal challenges brought by their solutions and avoid investing in dangerous ideas. Meanwhile, strict regulatory and legal constraints can enhance the public’s confidence in the security of autonomous driving. A practical test is undoubtedly the key to leading the reform in establishing and improving the regulatory and legislative framework.
6.4.3. Changes to Insurance
Autonomous vehicles will create complex challenges and reforms for the insurance industry, and insurers must redesign appropriate products for autonomous vehicle owners, passengers, and operators. Insurers cannot wholly and reasonably evaluate the risks associated with autonomous vehicles. With the expansion of autonomous vehicle services, people originally unqualified to drive will form a new customer base, and how to evaluate these risks will undoubtedly be another significant challenge for the insurance industry.
6.4.4. Investment in Infrastructure
The popularity of fully autonomous vehicles is directly associated with infrastructure. Firstly, the dynamic inspection of road infrastructure ensures that autonomous vehicles read road information accurately to drive correctly. Secondly, full coverage of data services within the road network is essential to prevent “offline”. Therefore, the investment in infrastructure development needs to be significantly increased.
6.4.5. Future Challenges and Opportunities
Challenges and opportunities in the future development of autonomous driving in EVs are summarized in Table 5.
7. Conclusions and Outlooks
In order to cope with the severe climate and energy crisis, the development of EVs has attracted more and more attention from countries around the world. Among various EV models, pure battery EVs have become the mainstream of the market due to their mature technology and easy-to-intelligence features. In this study, several typical and most important emerging technologies in EVs, including wireless charging, smart power distribution, V2G and V2H systems, connected vehicles, and autonomous driving, were discussed.
The opportunities, challenges, and prospects for emerging EV technologies were systematically discussed. Wireless charging offers the ultimate convenience for consumers and enables safe charging in potentially hazardous environments where electrical sparks could cause an explosion. The growing number of fast EV chargers will be a key driver for the wireless EV charging market. The emerging concept of dynamic charging involves charging coils installed under a road, which can continuously charge EVs when waiting at a traffic light or even while driving. The growth in the number of EVs may significantly impact the peak demand of the electricity distribution network of a city. The large-scale deployment of smart power distribution is essential to supporting the adoption of solar PVs, EV chargers, and smart buildings, all of which are vital components of the development of a smart city. In addition to being a travel device, EVs can also act as very large energy storage devices. V2G and V2H systems could provide enormous capacity for renewable energy storage and help stabilize the power grid power supply. Given their projected penetration into the market, EVs have the potential to provide, via their batteries, the most important component in the evolution of the smart grid: energy storage. Integrating a V2G system with retired EV batteries could provide more stable energy storage capacity for the grid and simultaneously extend the life cycle of vehicle batteries, creating less overall environmental impact. The IoV will play a significant role in EVs, mainly in the aspects of charging management and parking reservations, fleet management, predictive maintenance, driving behavior analysis, insurance, traffic control, and infotainment. CVs depend on reliable and secure networks for their operation, but two main technical issues need to be tackled: network speed and capacity and cyber security. Operating and conducting all dynamic driving tasks without the input of human drivers means that autonomous vehicles must be absolutely dependent on reliable and secure technology. Sensory, control, and telematics technologies are the keys to reliable autonomous driving. The integration and complementarity of EVs and autonomous driving will be an important opportunity for future smart transportation and smart cities. Moreover, the successful commercialization development cases of these emerging EV technologies were provided to demonstrate their marketization progress and breakthroughs in addition to basic research.
Policymakers could offer specific financial support and testing facilities for the research side (universities, R&D institutions), the service provision side (power, charging service, telecommunication service, data), and the consumer side (EV user groups). These target-oriented measures will help the various sides involved in the industry to jointly proceed towards the goal and create a strategic roadmap for the development of the emerging EV industry. Outdated entries in existing regulations that are not conducive to the development of the industry should also be repealed through market feedback, and a suitable legal framework for the development of EV technology should be explored. Policymakers could provide financial subsidies and attract private investment for emerging EV technologies to promote their commercialization sooner. Policymakers could support the deployment of 5G network infrastructure to create a unified data-sharing platform for R&D personnel, producers, and other industry interests, which will significantly contribute to the development of V2X and the autonomous driving industry. However, the promotion and practical application of these emerging technologies still face some urgent problems, including:
- High investment in basic hardware facilities;
- Insufficient market to participate in the testing of emerging EV technologies;
- Lack of open data for smart power distribution, V2G, V2H, and CVs;
- Mismatched 5G networks for necessary high-speed data transfer;
- Insufficient Big Data analysis ability.
- Lack of policy and legal support in many markets to develop these emerging technologies, especially autonomous driving;
- Lack of platforms to communicate, share, and display test results of new technologies.
Author Contributions
Conceptualization, Y.L. (Yang Luo); methodology, T.M. and Y.L. (Yang Luo); validation, Y.L. (Yu Li), Y.W. and Y.L. (Yang Luo); formal analysis, Y.W.; investigation, Y.W. and Y.L. (Yang Luo); resources, T.M.; data curation, T.M., Y.L. (Yu Li) and Y.L. (Yang Luo); writing—original draft preparation, T.M. and Y.L. (Yang Luo); writing—review and editing, Y.W. and Y.L. (Yang Luo); visualization, T.M. and Y.L. (Yang Luo); supervision, K.-t.L. and C.K.P.; project administration, T.M., K.-t.L. and C.K.P.; funding acquisition, T.M., Y.L. (Yu Li) and Y.L. (Yang Luo). All authors have read and agreed to the published version of the manuscript.
Funding
The work was funded by the Innovation and Technology Fund (ITF) of the Government of Hong Kong SAR (No. PRP/067/19AI).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data presented in this study are available upon request from the corresponding authors.
Acknowledgments
The authors thank Artur Braun and Thomas Graulefor at Empa (Swiss Federal Laboratories for Materials Science and Technology) for their cooperation and support.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Wang, L.; Nian, V.; Li, H.; Yuan, J. Impacts of electric vehicle deployment on the electricity sector in a highly urbanised environment. J. Clean. Prod. 2021, 295, 126386. [Google Scholar] [CrossRef]
- Luo, Y.; Wu, Y.; Li, B.; Mo, T.; Li, Y.; Feng, S.-P.; Qu, J.; Chu, P.K. Development and application of fuel cells in the automobile industry. J. Energy Storage 2021, 42, 103124. [Google Scholar] [CrossRef]
- Ajanovic, A.; Glatt, A.; Haas, R. Prospects and impediments for hydrogen fuel cell buses. Energy 2021, 235, 121340. [Google Scholar] [CrossRef]
- Vaideeswaran, V.; Ragul, M.; Keerthana, V.; Prathiksha, M. Review on Selection of Battery Packs for Pure Electric Vehicles and Technical Comparison of Battery Packs. In Proceedings of the 2021 Innovations in Power and Advanced Computing Technologies (i-PACT), Kuala Lumpur, Malaysia, 27–29 November 2021; pp. 1–6. [Google Scholar]
- Ho, J.C.; Huang, Y.-H. Evaluation of electric vehicle power technologies: Integration of technological performance and market preference. Clean. Responsible Consum. 2022, 5, 100063. [Google Scholar] [CrossRef]
- Karki, A.; Phuyal, S.; Tuladhar, D.; Basnet, S.; Shrestha, B.P. Status of Pure Electric Vehicle Power Train Technology and Future Prospects. Appl. Syst. Innov. 2020, 3, 35. [Google Scholar] [CrossRef]
- Cheng, K.; Zou, Y.; Xin, X.; Gong, S. Optimal lane expansion model for a battery electric vehicle transportation network considering range anxiety and demand uncertainty. J. Clean. Prod. 2020, 276, 124198. [Google Scholar] [CrossRef]
- Rizopoulos, D.; Esztergár-Kiss, D. A Method for the Optimization of Daily Activity Chains Including Electric Vehicles. Energies 2020, 13, 906. [Google Scholar] [CrossRef]
- Sun, Z.; Gao, W.; Li, B.; Wang, L. Locating charging stations for electric vehicles. Transp. Policy 2020, 98, 48–54. [Google Scholar] [CrossRef]
- Kong, Q.; Fowler, M.; Entchev, E.; Ribberink, H.; McCallum, R. The Role of Charging Infrastructure in Electric Vehicle Implementation within Smart Grids. Energies 2018, 11, 3362. [Google Scholar] [CrossRef]
- Gupta, V.; Kumar, R.; Panigrahi, B.K. User-Willingness-Based Decentralized EV Charging Management in Multiaggregator Scheduling. IEEE Trans. Ind. Appl. 2020, 56, 5704–5715. [Google Scholar] [CrossRef]
- Abdullah, H.M.; Gastli, A.; Ben-Brahim, L. Reinforcement Learning Based EV Charging Management Systems—A Review. IEEE Access 2021, 9, 41506–41531. [Google Scholar] [CrossRef]
- Sun, L.; Ma, D.; Tang, H. A review of recent trends in wireless power transfer technology and its applications in electric vehicle wireless charging. Renew. Sustain. Energy Rev. 2018, 91, 490–503. [Google Scholar] [CrossRef]
- Hildermeier, J.; Kolokathis, C.; Rosenow, J.; Hogan, M.; Wiese, C.; Jahn, A. Smart EV Charging: A Global Review of Promising Practices. World Electr. Veh. J. 2019, 10, 80. [Google Scholar] [CrossRef]
- Arfeen, Z.A.; Khairuddin, A.B.; Munir, A.; Azam, M.K.; Faisal, M.; Arif, M.S.B. En route of electric vehicles with the vehicle to grid technique in distribution networks: Status and technological review. Energy Storage 2020, 2, e115. [Google Scholar] [CrossRef]
- Dibaei, M.; Zheng, X.; Jiang, K.; Abbas, R.; Liu, S.; Zhang, Y.; Xiang, Y.; Yu, S. Attacks and defences on intelligent connected vehicles: A survey. Digit. Commun. Netw. 2020, 6, 399–421. [Google Scholar] [CrossRef]
- Mozaffari, S.; Al-Jarrah, O.Y.; Dianati, M.; Jennings, P.; Mouzakitis, A. Deep Learning-Based Vehicle Behavior Prediction for Autonomous Driving Applications: A Review. IEEE Trans. Intell. Transp. Syst. 2022, 23, 33–47. [Google Scholar] [CrossRef]
- Manzetti, S.; Mariasiu, F. Electric vehicle battery technologies: From present state to future systems. Renew. Sustain. Energy Rev. 2015, 51, 1004–1012. [Google Scholar] [CrossRef]
- Fotouhi, A.; Auger, D.J.; Propp, K.; Longo, S.; Wild, M. A review on electric vehicle battery modelling: From Lithium-ion toward Lithium–Sulphur. Renew. Sustain. Energy Rev. 2016, 56, 1008–1021. [Google Scholar] [CrossRef]
- Eldho Aliasand, A.; Josh, F.T. Selection of Motor foran Electric Vehicle: A Review. Mater. Today Proc. 2020, 24, 1804–1815. [Google Scholar] [CrossRef]
- Klerk, M.L.D.; Saha, A.K. A Comprehensive Review of Advanced Traction Motor Control Techniques Suitable for Electric Vehicle Applications. IEEE Access 2021, 9, 125080–125108. [Google Scholar] [CrossRef]
- Ahmad, A.; Khan, Z.A.; Saad Alam, M.; Khateeb, S. A Review of the Electric Vehicle Charging Techniques, Standards, Progression and Evolution of EV Technologies in Germany. Smart Sci. 2018, 6, 36–53. [Google Scholar] [CrossRef]
- Sun, X.; Li, Z.; Wang, X.; Li, C. Technology Development of Electric Vehicles: A Review. Energies 2020, 13, 90. [Google Scholar] [CrossRef]
- Wu, G.; Zhang, X.; Dong, Z. Powertrain architectures of electrified vehicles: Review, classification and comparison. J. Frankl. Inst. 2015, 352, 425–448. [Google Scholar] [CrossRef]
- Gao, Y.; Duan, C.; Oliveira, A.A.; Ginart, A.; Farley, K.B.; Tse, Z.T.H. 3-D Coil Positioning Based on Magnetic Sensing for Wireless EV Charging. IEEE Trans. Transp. Electrif. 2017, 3, 578–588. [Google Scholar] [CrossRef]
- Khutwad, S.R.; Gaur, S. Wireless charging system for EV. In Proceedings of the 2016 International Conference on Signal Processing, Communication, Power and Embedded System (SCOPES), Odisha, India, 3–5 October 2016; pp. 441–445. [Google Scholar]
- Ahmad, A.; Alam, M.S.; Chabaan, R. A Comprehensive Review of Wireless Charging Technologies for EVs. IEEE Trans. Transp. Electrif. 2018, 4, 38–63. [Google Scholar] [CrossRef]
- Amjad, M.; Farooq-i-Azam, M.; Ni, Q.; Dong, M.; Ansari, E.A. Wireless charging systems for electric vehicles. Renew. Sustain. Energy Rev. 2022, 167, 112730. [Google Scholar] [CrossRef]
- Panchal, C.; Stegen, S.; Lu, J. Review of static and dynamic wireless EV charging system. Eng. Sci. Technol. Int. J. 2018, 21, 922–937. [Google Scholar]
- Laporte, S.; Coquery, G.; Deniau, V.; De Bernardinis, A.; Hautiere, N. Dynamic wireless power transfer charging infrastructure for future evs: From experimental track to real circulated roads demonstrations. World EV J. 2019, 10, 84. [Google Scholar] [CrossRef]
- Campi, T.; Cruciani, S.; Santis, V.D.; Maradei, F.; Feliziani, M. EMC and EMF safety issues in wireless charging system for an EV (EV). In Proceedings of the 2017 International Conference of Electrical and Electronic Technologies for Automotive, Torino, Italy, 15–16 June 2017; pp. 1–4. [Google Scholar]
- Gao, Y.; Farley, K.B.; Ginart, A.; Tse, Z.T.H. Safety and efficiency of the wireless charging of EVs. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2016, 230, 1196–1207. [Google Scholar] [CrossRef]
- Hasan, M.I.; Mukta, N.A.; Islam, M.M.; Chowdhury, A.M.S.; Ismail, M. Evaluation of Fuel Properties of Sal (Shorea robusta) Seed and Its Oil from Their Physico-chemical Characteristics and Thermal Analysis. Energy Sources Part A Recovery Util. Environ. Eff. 2020, 1–12. [Google Scholar] [CrossRef]
- Longo, M.; Zaninelli, D.; Viola, F.; Romano, P.; Miceli, R.; Caruso, M.; Pellitteri, F. Recharge stations: A review. In Proceedings of the 2016 Eleventh International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte Carlo, Monaco, 6–8 April 2016; pp. 1–8. [Google Scholar]
- Debbou, M.; Colet, F. Inductive wireless power transfer for EV dynamic charging. In Proceedings of the 2016 IEEE PELS Workshop on Emerging Technologies: Wireless Power Transfer (WoW), Knoxville, TN, USA, 4–6 October 2016; pp. 118–122. [Google Scholar]
- Plugless Power. Available online: https://www.pluglesspower.com/home-page-2/ (accessed on 1 July 2022).
- WiTricity. Available online: http://witricity.com/products/automotive/ (accessed on 1 July 2022).
- Qualcomm. Available online: https://www.qualcomm.com/solutions/automotive/wevc (accessed on 1 July 2022).
- Dai, Z.; Wang, J.; Long, M.; Huang, H. A Witricity-based high-power device for wireless charging of EVs. Energies 2017, 10, 323. [Google Scholar] [CrossRef] [Green Version]
- Ho, S.L.; Wang, J.; Fu, W.; Sun, M. A comparative study between novel witricity and traditional inductive magnetic coupling in wireless charging. IEEE Trans. Magn. 2011, 47, 1522–1525. [Google Scholar] [CrossRef]
- Niu, S.; Xu, H.; Sun, Z.; Shao, Z.; Jian, L. The state-of-the-arts of wireless EV charging via magnetic resonance: Principles, standards and core technologies. Renew. Sustain. Energy Rev. 2019, 114, 109302. [Google Scholar] [CrossRef]
- Alam, B.; Islam, N.; Subhan, I.; Sarfraz, M. Analysis and Modelling of Basic Wireless Power Transfer Compensation Topology: A Review. In Intelligent Data Analytics for Power and Energy Systems; Malik, H., Ahmad, M.W., Kothari, D.P., Eds.; Springer: Singapore, 2022; pp. 501–515. [Google Scholar]
- Yoon, U. Pickup and Rectifier. In The On-line EV: Wireless Electric Ground Transportation Systems; Suh, N.P., Cho, D.H., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 171–185. [Google Scholar]
- Wang, K.; Sang, L.; Zhang, Y.; Chang, Y.; Zhang, X. Optimization Design for Wireless Power Transfer System under the Variation of Load and Coupling Coefficients. In Proceedings of the 2019 IEEE 4th Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chengdu, China, 20–22 December 2019; pp. 867–872. [Google Scholar]
- Zhang, X.; Zhu, C.; Song, H. Wireless Power Transfer Technologies for EVs; Springer International Publishing: Cham, Switzerland, 2022. [Google Scholar]
- Machura, P.; Li, Q. A critical review on wireless charging for electric vehicles. Renew. Sustain. Energy Rev. 2019, 104, 209–234. [Google Scholar] [CrossRef]
- Elma, O. A dynamic charging strategy with hybrid fast charging station for EVs. Energy 2020, 202, 117680. [Google Scholar] [CrossRef]
- Zheng, Y.; Jian, L. Smart charging algorithm of EVs considering dynamic charging priority. In Proceedings of the 2016 IEEE International Conference on Information and Automation (ICIA), Ningbo, China, 1–3 August 2016; pp. 555–560. [Google Scholar]
- Hu, J.; Li, J.; Hu, Z.; Xu, L.; Ouyang, M. Power distribution strategy of a dual-engine system for heavy-duty hybrid EVs using dynamic programming. Energy 2021, 215, 118851. [Google Scholar] [CrossRef]
- Solanke, T.U.; Khatua, P.K.; Ramachandaramurthy, V.K.; Yong, J.Y.; Tan, K.M. Control and management of a multilevel electric vehicles infrastructure integrated with distributed resources: A comprehensive review. Renew. Sustain. Energy Rev. 2021, 144, 111020. [Google Scholar] [CrossRef]
- Jawad, M.; Qureshi, M.B.; Ali, S.M.; Shabbir, N.; Khan, M.U.S.; Aloraini, A.; Nawaz, R. A cost-effective EV intelligent charge scheduling method for commercial smart parking lots using a simplified convex relaxation technique. Sensors 2020, 20, 4842. [Google Scholar] [CrossRef]
- Kumar, D.; Nema, R.K.; Gupta, S. A comparative review on power conversion topologies and energy storage system for EVs. Int. J. Energy Res. 2020, 44, 7863–7885. [Google Scholar] [CrossRef]
- Sun, X.-H.; Yamamoto, T.; Morikawa, T. Charge timing choice behavior of battery EV users. Transp. Res. Part D Transp. Environ. 2015, 37, 97–107. [Google Scholar] [CrossRef]
- Langbroek, J.H.; Franklin, J.P.; Susilo, Y.O. When do you charge your EV? A stated adaptation approach. Energy Policy 2017, 108, 565–573. [Google Scholar] [CrossRef]
- Zhang, R.; Cheng, X.; Yang, L. Energy management framework for EVs in the smart grid: A three-party game. IEEE Commun. Mag. 2016, 54, 93–101. [Google Scholar] [CrossRef]
- Atterby, A.; Bluj, J.; Sjögren, E. Potential for EV Smart Charging Station Expansion at Fyrisskolan. Bachelor’s Thesis, Uppsala University, Uppsala, Sweden, 4 June 2018. [Google Scholar]
- Al Dakheel, J.; Del Pero, C.; Aste, N.; Leonforte, F. Smart buildings features and key performance indicators: A review. Sustain. Cities Soc. 2020, 61, 102328. [Google Scholar] [CrossRef]
- Rajani, B.; Sekhar, D.C. A hybrid optimization based energy management between EV and electricity distribution system. Int. Trans. Electr. Energy Syst. 2021, 31, e12905. [Google Scholar] [CrossRef]
- Arias, N.B.; Hashemi, S.; Andersen, P.B.; Træholt, C.; Romero, R. Distribution System Services Provided by Electric Vehicles: Recent Status, Challenges, and Future Prospects. IEEE Trans. Intell. Transp. Syst. 2019, 20, 4277–4296. [Google Scholar] [CrossRef]
- Vadi, S.; Bayindir, R.; Colak, A.M.; Hossain, E. A Review on Communication Standards and Charging Topologies of V2G and V2H Operation Strategies. Energies 2019, 12, 3748. [Google Scholar] [CrossRef]
- Wang, Y.; Sheikh, O.; Hu, B.; Chu, C.; Gadh, R. Integration of V2H/V2G hybrid system for demand response in distribution network. In Proceedings of the 2014 IEEE International Conference on Smart Grid Communications (SmartGridComm), Venice, Italy, 3–6 November 2014; pp. 812–817. [Google Scholar]
- Shin, H.; Baldick, R. Plug-In EV to Home (V2H) Operation under a Grid Outage. IEEE Trans. Smart Grid 2016, 8, 2032–2041. [Google Scholar] [CrossRef]
- Sovacool, B.K.; Kester, J.; Noel, L.; Zarazua de Rubens, G. Actors, business models, and innovation activity systems for vehicle-to-grid (V2G) technology: A comprehensive review. Renew. Sustain. Energy Rev. 2020, 131, 109963. [Google Scholar] [CrossRef]
- Saldaña, G.; San Martin, J.I.; Zamora, I.; Asensio, F.J.; Oñederra, O. EV into the grid: Charging methodologies aimed at providing ancillary services considering battery degradation. Energies 2019, 12, 2443. [Google Scholar] [CrossRef]
- Wu, Q.; Larsen, E.; Heussen, K.; Binder, H.; Douglass, P. Remote Off-Grid Solutions for Greenland and Denmark: Using smart-grid technologies to ensure secure, reliable energy for island power systems. IEEE Electrif. Mag. 2017, 5, 64–73. [Google Scholar] [CrossRef]
- Aabrandt, A.; Andersen, P.B.; Pedersen, A.B.; You, S.; Poulsen, B.; Connell, N.O.; Østergaard, J. Prediction and optimization methods for EV charging schedules in the EDISON project. In Proceedings of the 2012 IEEE PES Innovative Smart Grid Technologies (ISGT), Washington, DC, USA, 16–20 January 2012; pp. 1–7. [Google Scholar]
- Soares, T.; Fonseca, C.; Morais, H.; Ramos, S.; Sousa, T. Assessment of Real-Time Tariffs for EVs in Denmark. In Proceedings of the 2019 IEEE Milan PowerTech, Milan, Italy, 23–27 June 2019; pp. 1–6. [Google Scholar]
- Riffle, C. The Resourceful City. In The Climate City; Wiley: Hoboken, NJ, USA, 2022; pp. 235–250. [Google Scholar]
- Savio, D.A.; Juliet, V.A.; Chokkalingam, B.; Padmanaban, S.; Holm-Nielsen, J.B.; Blaabjerg, F. Photovoltaic Integrated Hybrid Microgrid Structured EV Charging Station and Its Energy Management Approach. Energies 2019, 12, 168. [Google Scholar] [CrossRef] [Green Version]
- Zanabria, C.; Andrén, F.P.; Kathan, J.; Strasser, T.I. Rapid Prototyping of Multi-Functional Battery Energy Storage System Applications. Appl. Sci. 2018, 8, 1326. [Google Scholar] [CrossRef]
- Thingvad, A.; Ziras, C.; Marinelli, M. Economic value of EV reserve provision in the Nordic countries under driving requirements and charger losses. J. Energy Storage 2019, 21, 826–834. [Google Scholar] [CrossRef]
- Cooke, P. Three Disruptive Models of New Spatial Planning: “Attention”, “Surveillance” or “Sustainable” Capitalisms? J. Open Innov. Technol. Mark. Complex. 2021, 7, 46. [Google Scholar] [CrossRef]
- Wang, J.; Duan, Y.; Liu, G. A Study of Specific Open Innovation Issues from Perspectives of Open Source and Resources—The Series Cases of Tesla. Sustainability 2022, 14, 142. [Google Scholar] [CrossRef]
- Wang, K.; Mao, Y.; Li, C. Electric Spring-Based Power Flow Routers for Economic Enhancement of the Microgrid Cluster Based on Smart Homes. In Proceedings of the 2021 IEEE/IAS Industrial and Commercial Power System Asia (I&CPS Asia), Chengdu, China, 18–21 July 2021; pp. 476–482. [Google Scholar]
- Thingvad, A.; Calearo, L.; Andersen, P.B.; Marinelli, M. Empirical Capacity Measurements of EVs Subject to Battery Degradation From V2G Services. IEEE Trans. Veh. Technol. 2021, 70, 7547–7557. [Google Scholar] [CrossRef]
- Zishan, A.A.; Haji, M.M.; Ardakanian, O. Adaptive Congestion Control for EV Charging in the Smart Grid. IEEE Trans. Smart Grid 2021, 12, 2439–2449. [Google Scholar] [CrossRef]
- Nasir, T.; Raza, S.; Abrar, M.; Muqeet, H.A.; Jamil, H.; Qayyum, F.; Cheikhrouhou, O.; Alassery, F.; Hamam, H. Optimal Scheduling of Campus Microgrid Considering the EV Integration in Smart Grid. Sensors 2021, 21, 7133. [Google Scholar] [CrossRef]
- Lebrouhi, B.E.; Khattari, Y.; Lamrani, B.; Maaroufi, M.; Zeraouli, Y.; Kousksou, T. Key challenges for a large-scale development of battery EVs: A comprehensive review. J. Energy Storage 2021, 44, 103273. [Google Scholar] [CrossRef]
- Lacap, J.; Park, J.W.; Beslow, L. Development and Demonstration of Microgrid System Utilizing Second-Life EV Batteries. J. Energy Storage 2021, 41, 102837. [Google Scholar] [CrossRef]
- Ben Sassi, H.; Alaoui, C.; Errahimi, F.; Es-Sbai, N. Vehicle-to-grid technology and its suitability for the Moroccan national grid. J. Energy Storage 2021, 33, 102023. [Google Scholar] [CrossRef]
- Islam, S.; Iqbal, A.; Marzband, M.; Khan, I.; Al-Wahedi, A.M.A.B. State-of-the-art vehicle-to-everything mode of operation of electric vehicles and its future perspectives. Renew. Sustain. Energy Rev. 2022, 166, 112574. [Google Scholar] [CrossRef]
- Arooj, A.; Farooq, M.S.; Akram, A.; Iqbal, R.; Sharma, A.; Dhiman, G. Big Data Processing and Analysis in Internet of Vehicles: Architecture, Taxonomy, and Open Research Challenges. Arch. Comput. Methods Eng. 2022, 29, 793–829. [Google Scholar] [CrossRef]
- Liu, C.; Ke, L. Cloud assisted Internet of things intelligent transportation system and the traffic control system in the smart city. J. Control. Decis. 2022, 1–14. [Google Scholar] [CrossRef]
- Tahir, M.N.; Katz, M. Performance evaluation of IEEE 802.11p, LTE and 5G in connected vehicles for cooperative awareness. Eng. Rep. 2022, 4, e12467. [Google Scholar] [CrossRef]
- Zhu, T.; Ji, G.; Jiang, G.; Ding, Y.; Feng, J.; Wang, C. Comparing and Analysis of Test and Evaluation Methods for Connected Vehicle Communication Antenna System. J. Phys. Conf. Ser. 2021, 2108, 012007. [Google Scholar] [CrossRef]
- Mihailescu, M.I.; Nita, S.L.; Rogobete, M.G. Authentication Protocol for Intelligent Cars using Fog Computing and Software-Defined Networking. In Proceedings of the 2021 13th International Conference on Electronics, Computers and Artificial Intelligence (ECAI), Pitesti, Romania, 1–3 July 2021; pp. 1–6. [Google Scholar]
- Kong, X.; Wang, K.; Hou, M.; Hao, X.; Shen, G.; Chen, X.; Xia, F. A Federated Learning-Based License Plate Recognition Scheme for 5G-Enabled Internet of Vehicles. IEEE Trans. Ind. Inform. 2021, 17, 8523–8530. [Google Scholar] [CrossRef]
- Hamida, E.B.; Noura, H.; Znaidi, W. Security of Cooperative Intelligent Transport Systems: Standards, Threats Analysis and Cryptographic Countermeasures. Electronics 2015, 4, 380–423. [Google Scholar] [CrossRef]
- Zhou, H.; Xu, W.; Chen, J.; Wang, W. Evolutionary V2X Technologies Toward the Internet of Vehicles: Challenges and Opportunities. Proc. IEEE 2020, 108, 308–323. [Google Scholar] [CrossRef]
- Biyik, C.; Allam, Z.; Pieri, G.; Moroni, D.; O’Fraifer, M.; O’Connell, E.; Olariu, S.; Khalid, M. Smart Parking Systems: Reviewing the Literature, Architecture and Ways Forward. Smart Cities 2021, 4, 623–642. [Google Scholar] [CrossRef]
- Ying, S. Research on operation and development prospect of urban intelligent parking system. In Proceedings of the 2021 International Conference on Internet, Education and Information Technology (IEIT), Suzhou, China, 16–18 April 2021; pp. 257–261. [Google Scholar]
- Kai, L.L.; Whitehead, J.; Jia, D.; Zheng, Z. State of data platforms for connected vehicles and infrastructures. Commun. Transp. Res. 2021, 1, 100013. [Google Scholar]
- Li, D.C.; Lin, M.Y.C.; Chou, L.D. Macroscopic Big Data Analysis and Prediction of Driving Behavior With an Adaptive Fuzzy Recurrent Neural Network on the Internet of Vehicles. IEEE Access 2022, 10, 47881–47895. [Google Scholar] [CrossRef]
- Karare, A.; Channe, R.; Paliwal, L.; Gupta, R. Advanced Real-Time Automated Smart Parking System for Smart Cities; Springer: Singapore, Singapore, 2021; pp. 205–215. [Google Scholar]
- Theissler, A.; Pérez-Velázquez, J.; Kettelgerdes, M.; Elger, G. Predictive maintenance enabled by machine learning: Use cases and challenges in the automotive industry. Reliab. Eng. Syst. Saf. 2021, 215, 107864. [Google Scholar] [CrossRef]
- Kaffash, S.; An, T.N.; Zhu, J. Big data algorithms and applications in intelligent transportation system: A review and bibliometric analysis. Int. J. Prod. Econ. 2020, 231, 107868. [Google Scholar] [CrossRef]
- Xing, Y.; Lv, C.; Mo, X.; Hu, Z.; Huang, C.; Hang, P. Toward Safe and Smart Mobility: Energy-Aware Deep Learning for Driving Behavior Analysis and Prediction of Connected Vehicles. IEEE Trans. Intell. Transp. Syst. 2021, 22, 4267–4280. [Google Scholar] [CrossRef]
- Fafoutellis, P.; Mantouka, E.G.; Vlahogianni, E.I. Acceptance of a Pay-How-You-Drive pricing scheme for city traffic: The case of Athens. Transp. Res. Part A Policy Pract. 2022, 156, 270–284. [Google Scholar] [CrossRef]
- Singh, H.; Kathuria, A. Analyzing driver behavior under naturalistic driving conditions: A review. Accid. Anal. Prev. 2021, 150, 105908. [Google Scholar] [CrossRef]
- Nai, W.; Yang, Z.; Wei, Y.; Sang, J.; Wang, J.; Wang, Z.; Mo, P. A Comprehensive Review of Driving Style Evaluation Approaches and Product Designs Applied to Vehicle Usage-Based Insurance. Sustainability 2022, 14, 7705. [Google Scholar] [CrossRef]
- Chow, A.; Su, Z.; Liang, E.M.; Zhong, R. Adaptive signal control for bus service reliability with connected vehicle technology via reinforcement learning. Transp. Res. Part C Emerg. Technol. 2021, 129, 103264. [Google Scholar] [CrossRef]
- Zhai, C.; Wu, W. Designing continuous delay feedback control for lattice hydrodynamic model under cyber-attacks and connected vehicle environment. Commun. Nonlinear Sci. Numer. Simul. 2021, 95, 105667. [Google Scholar] [CrossRef]
- Yu, Z.; Jin, D. Determinants of Users’ Attitude and Intention to Intelligent Connected Vehicle Infotainment in the 5G-V2X Mobile Ecosystem. Int. J. Environ. Res. Public Health 2021, 18, 10069. [Google Scholar] [CrossRef] [PubMed]
- Kim, S.; Cho, Y.; Kim, S. Expected Effect of Adopting the eCall System on Reducing Traffic-Related Deaths and Social Costs. IEEE Intell. Transp. Syst. Mag. 2022, 2–20. [Google Scholar] [CrossRef]
- Radhakrishnan, R.; Nellisserry, L.A.; Muralikrishnan, O.; Thambi, R.; Parvathy, M. Automatic vehicle accident detection and rescue system. Mater. Today Proc. 2021. [Google Scholar] [CrossRef]
- Bracali, A.; Barbani, D.; Baldanzini, N. Feasibility study for the estimation of a motorcycle helmet Centre of Gravity accelerations with 6 Degrees of Freedom (6DOF) system. Transp. Res. Interdiscip. Perspect. 2022, 14, 100603. [Google Scholar] [CrossRef]
- Kotalova, N.; Michalcova, L.; Rehak, D.; Kralova, K. Sharing and Providing Information to Protect Soft Targets in the Railway Infrastructure. Transp. Res. Procedia 2021, 55, 1759–1766. [Google Scholar] [CrossRef]
- Axsen, J.; Kurani, K.S.; McCarthy, R.; Yang, C. Plug-in hybrid vehicle GHG impacts in California: Integrating consumer-informed recharge profiles with an electricity-dispatch model. Energy Policy 2011, 39, 1617–1629. [Google Scholar] [CrossRef]
- Alkinani, M.H.; Almazroi, A.A.; Jhanjhi, N.; Khan, N.A. 5G and IoT Based Reporting and Accident Detection (RAD) System to Deliver First Aid Box Using Unmanned Aerial Vehicle. Sensors 2021, 21, 6905. [Google Scholar] [CrossRef]
- Riaz, M.T.; Aaqib, S.M.; Ahmad, S.; Amin, S.; Ali, H.; Husnain, S.; Riaz, S. The Intelligent Transportation Systems with Advanced Technology of Sensor and Network. In Proceedings of the 2021 International Conference on Computing, Electronic and Electrical Engineering (ICE Cube), Quetta, Pakistan, 26–27 October 2021; pp. 1–6. [Google Scholar]
- Cao, W.; Liu, S.; Li, J.; Zhang, Z.; He, H. Analysis and Design of Adaptive Cruise Control for Smart EV with Domain-based Poly-Service Loop Delay. IEEE Trans. Ind. Electron. 2022, 70, 866–877. [Google Scholar] [CrossRef]
- Mo, T.; Lau, K.-t.; Li, Y.; Poon, C.-k.; Wu, Y.; Chu, P.K.; Luo, Y. Commercialization of EVs in Hong Kong. Energies 2022, 15, 942. [Google Scholar] [CrossRef]
- Feng, Y.; Huang, S.E.; Wong, W.; Chen, Q.A.; Mao, Z.M.; Liu, H.X. On the Cybersecurity of Traffic Signal Control System With Connected Vehicles. IEEE Trans. Intell. Transp. Syst. 2022, 1–13. [Google Scholar] [CrossRef]
- Carvajal-Roca, I.E.; Wang, J. A semi-decentralized security framework for Connected and Autonomous Vehicles. In Proceedings of the 2021 IEEE 94th Vehicular Technology Conference (VTC2021-Fall), Norman, OK, USA, 27–30 September 2021; pp. 1–6. [Google Scholar]
- Kim, M.; Lee, J.; Oh, J.; Park, K.; Park, Y.; Park, K. Blockchain based energy trading scheme for vehicle-to-vehicle using decentralized identifiers. Appl. Energy 2022, 322, 119445. [Google Scholar] [CrossRef]
- Khan, M.A.; Ghosh, S.; Busari, S.A.; Huq, K.M.S.; Dagiuklas, T.; Mumtaz, S.; Iqbal, M.; Rodriguez, J. Robust, Resilient and Reliable Architecture for V2X Communications. IEEE Trans. Intell. Transp. Syst. 2021, 22, 4414–4430. [Google Scholar] [CrossRef]
- Miao, J. Design of a Data Security Access Control Algorithm for the EV Internet of Vehicles Based on Blockchain Technology. World EV J. 2022, 13, 111. [Google Scholar]
- Du, P.; Nakao, A.; Zhong, L.; Ma, J.; Onishi, R. Service-aware 5G/B5G Cellular Networks for Future Connected Vehicles. In Proceedings of the 2021 IEEE International Smart Cities Conference (ISC2), Manchester, UK, 7–10 September 2021; pp. 1–4. [Google Scholar]
- Naeem, M.; Jamal, T.; Diaz-Martinez, J.; Butt, S.A.; Montesano, N.; Tariq, M.I.; De-la-Hoz-Franco, E.; De-La-Hoz-Valdiris, E. Trends and Future Perspective Challenges in Big Data. In Proceedings of the Advances in Intelligent Data Analysis and Applications, Singapore, Singapore; 2022; pp. 309–325. [Google Scholar]
- Reebadiya, D.; Rathod, T.; Gupta, R.; Tanwar, S.; Kumar, N. Blockchain-based Secure and Intelligent Sensing Scheme for Autonomous Vehicles Activity Tracking Beyond 5G Networks. Peer-to-Peer Netw. Appl. 2021, 14, 2757–2774. [Google Scholar] [CrossRef]
- Gannavaram V, T.K.; Bejgam, R. Brief Study and Review on the Next Revolutionary Autonomous Vehicle Technology. In Proceedings of the 2021 International Conference on Advance Computing and Innovative Technologies in Engineering (ICACITE), Greater Noida, India, 4–5 March 2021; pp. 34–37. [Google Scholar]
- Bob, W. Automated Driving Levels. In Automated Vehicles and MaaS: Removing the Barriers; IEEE: Piscataway, NJ, USA, 2021; pp. 19–41. [Google Scholar]
- Steckhan, L.; Spiessl, W.; Quetschlich, N.; Bengler, K. Beyond SAE J3016: New Design Spaces for Human-Centered Driving Automation; Springer: Cham, Switzerland, 2022; pp. 416–434. [Google Scholar]
- Xu, W.; Yan, C.; Jia, W.; Ji, X.; Liu, J. Analyzing and Enhancing the Security of Ultrasonic Sensors for Autonomous Vehicles. Internet Things J. IEEE 2018, 5, 5015–5029. [Google Scholar] [CrossRef]
- Chand, D.; Gupta, S.; Kavati, I. Computer Vision based Accident Detection for Autonomous Vehicles. In Proceedings of the 2020 IEEE 17th India Council International Conference (INDICON), New Delhi, India, 10–13 December 2020; pp. 1–6. [Google Scholar]
- Janai, J.; Güney, F.; Behl, A.; Geiger, A. Computer Vision for Autonomous Vehicles: Problems, Datasets and State of the Art. Found. Trends® Comput. Graph. Vis. 2020, 12, 1–308. [Google Scholar] [CrossRef]
- Vargas, J.; Alsweiss, S.; Toker, O.; Razdan, R.; Santos, J. An Overview of Autonomous Vehicles Sensors and Their Vulnerability to Weather Conditions. Sensors 2021, 21, 5397. [Google Scholar] [CrossRef]
- Kukkala, V.K.; Tunnell, J.; Pasricha, S.; Bradley, T. Advanced Driver-Assistance Systems: A Path Toward Autonomous Vehicles. IEEE Consum. Electron. Mag. 2018, 7, 18–25. [Google Scholar] [CrossRef]
- Bai, J.; Li, S.; Tan, B.; Zheng, L.; Huang, L.; Dong, L. Traffic participants classification based on 3D radio detection and ranging point clouds. IET Radar Sonar Navig. 2022, 16, 278–290. [Google Scholar] [CrossRef]
- Gao, H.; Cheng, B.; Wang, J.; Li, K.; Zhao, J.; Li, D. Object Classification Using CNN-Based Fusion of Vision and LIDAR in Autonomous Vehicle Environment. IEEE Trans. Ind. Inform. 2018, 14, 4224–4231. [Google Scholar] [CrossRef]
- Royo, S.; Ballesta-Garcia, M. An Overview of Lidar Imaging Systems for Autonomous Vehicles. Appl. Sci. 2019, 9, 4093. [Google Scholar] [CrossRef]
- Péter, G.; Kiss, B.; Tihanyi, V. Vision and odometry based autonomous vehicle lane changing. ICT Express 2019, 5, 219–226. [Google Scholar] [CrossRef]
- Esfahani, M.A.; Wang, H.; Wu, K.; Yuan, S. AbolDeepIO: A Novel Deep Inertial Odometry Network for Autonomous Vehicles. IEEE Trans. Intell. Transp. Syst. 2020, 21, 1941–1950. [Google Scholar] [CrossRef]
- Kong, L.; Khan, M.K.; Wu, F.; Chen, G.; Zeng, P. Millimeter-Wave Wireless Communications for IoT-Cloud Supported Autonomous Vehicles: Overview, Design, and Challenges. IEEE Commun. Mag. 2017, 55, 62–68. [Google Scholar] [CrossRef]
- Chandra Shit, R. Crowd intelligence for sustainable futuristic intelligent transportation system: A review. IET Intell. Transp. Syst. 2020, 14, 480–494. [Google Scholar]
- Azam, S.; Munir, F.; Sheri, A.M.; Kim, J.; Jeon, M. System, design and experimental validation of autonomous vehicle in an unconstrained environment. Sensors 2020, 20, 5999. [Google Scholar] [CrossRef]
- Shahian Jahromi, B.; Tulabandhula, T.; Cetin, S. Real-time hybrid multi-sensor fusion framework for perception in autonomous vehicles. Sensors 2019, 19, 4357. [Google Scholar] [CrossRef]
- Jeong, J.; Yoon, T.S.; Park, J.B. Towards a meaningful 3D map using a 3D lidar and a camera. Sensors 2018, 18, 2571. [Google Scholar] [CrossRef]
- Aladem, M.; Rawashdeh, S.A. Lightweight visual odometry for autonomous mobile robots. Sensors 2018, 18, 2837. [Google Scholar] [CrossRef]
- Thadeshwar, H.; Shah, V.; Jain, M.; Chaudhari, R.; Badgujar, V. Artificial Intelligence based Self-Driving Car. In Proceedings of the 2020 4th International Conference on Computer, Communication and Signal Processing (ICCCSP), Chennai, India, 28–29 September 2020; pp. 1–5. [Google Scholar]
- Yao, Q.; Tian, Y.; Wang, Q.; Wang, S. Control Strategies on Path Tracking for Autonomous Vehicle: State of the Art and Future Challenges. IEEE Access 2020, 8, 161211–161222. [Google Scholar] [CrossRef]
- Ulhe, P.B.; Sinha, A.; Dixit, V.M.; Bhoyar, V.V.; Gawali, G.V.; Nawkhare, S.A. V2V Communication: A Study on Autonomous Driving using VANET and Telematics. In Proceedings of the 2020 International Conference on Inventive Computation Technologies (ICICT), Coimbatore, India, 26–28 February 2020; pp. 806–809. [Google Scholar]
- Kumar, R. Insurance Telematics: Risk Assessment of Connected Vehicles. In Proceedings of the 2019 IEEE Transportation Electrification Conference (ITEC-India), Bengaluru, India, 17–19 December 2019; pp. 1–4. [Google Scholar]
- Khamis, A. Smart Mobility: Foundational Technologies. In Smart Mobility: Exploring Foundational Technologies and Wider Impacts; Apress: Berkeley, CA, USA, 2021; pp. 21–73. [Google Scholar]
- Kazi, K.; Bikmetov, R.; Lim, C.; Raja, M.Y.A.; Kelsey, A. Secure, Resilient, and Safety Critical Architecture of Charging Stations for Unsupervised Autonomous Vehicles. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November2018; pp. 2777–2783. [Google Scholar]
- Noel, L.; Zarazua de Rubens, G.; Sovacool, B.K.; Kester, J. Fear and loathing of EVs: The reactionary rhetoric of range anxiety. Energy Res. Soc. Sci. 2019, 48, 96–107. [Google Scholar]
- Watzenig, D.; Horn, M. Introduction to Automated Driving. In Automated Driving: Safer and More Efficient Future Driving, Watzenig, D., Horn, M., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 3–16. [Google Scholar]
- Mauler, L.; Duffner, F.; Zeier, W.G.; Leker, J. Battery cost forecasting: A review of methods and results with an outlook to 2050. Energy Environ. Sci. 2021, 14, 4712–4739. [Google Scholar]
- Bersani, M.; Mentasti, S.; Dahal, P.; Arrigoni, S.; Vignati, M.; Cheli, F.; Matteucci, M. An integrated algorithm for ego-vehicle and obstacles state estimation for autonomous driving. Robot. Auton. Syst. 2021, 139, 103662. [Google Scholar]
- Scanlon, J.M.; Kusano, K.D.; Daniel, T.; Alderson, C.; Ogle, A.; Victor, T. Waymo simulated driving behavior in reconstructed fatal crashes within an autonomous vehicle operating domain. Accid. Anal. Prev. 2021, 163, 106454. [Google Scholar]
- Miethig, B.; Liu, A.; Habibi, S.; Mohrenschildt, M.V. Leveraging Thermal Imaging for Autonomous Driving. In Proceedings of the 2019 IEEE Transportation Electrification Conference and Expo (ITEC), Detroit, MI, USA, 19–21 June 2019; pp. 1–5. [Google Scholar]
- ArsTechnica. Available online: https://arstechnica.com/cars/2017/09/waymos-autonomous-vehicles-are-powered-by-intel/ (accessed on 1 July 2022).
- Hyundai and Seoul Set to Test Self-Driving Cars on City Roads Starting Next Month. Available online: https://techcrunch.com/2019/11/22/hyundai-and-seoul-set-to-test-self-driving-cars-on-city-roads-starting-next-month/ (accessed on 1 July 2022).
- NTU Singapore to Trial New Autonomous Vehicles on Its Smart Campus (IMAGE). Available online: https://www.eurekalert.org/multimedia/573628 (accessed on 1 July 2022).
- MIT Technology Review. Available online: https://www.technologyreview.com/s/608229/chinas-plan-to-take-over-all-self-driving-cars/ (accessed on 1 July 2022).
- UISEE Finds a Shortcut for Driverless Cars. Available online: http://knowledge.ckgsb.edu.cn/2017/06/19/automobile-industry/uisee-technology-finds-shortcut-driverless-cars/ (accessed on 1 July 2022).
- Zhang, Y.; Sun, H.; Zhou, J.; Pan, J.; Hu, J.; Miao, J. Optimal Vehicle Path Planning Using Quadratic Optimization for Baidu Apollo Open Platform. In Proceedings of the 2020 IEEE Intelligent Vehicles Symposium (IV), Las Vegas, NV, USA, 19 November–13 November 2020; pp. 978–984. [Google Scholar]
- Ersal, T.; Kolmanovsky, I.; Masoud, N.; Ozay, N.; Scruggs, J.; Vasudevan, R.; Orosz, G. Connected and automated road vehicles: State of the art and future challenges. Veh. Syst. Dyn. 2020, 58, 672–704. [Google Scholar]
Figure 1.
Structure and highlights of this review.

Figure 2.
(a) Stationary wireless charging [29]; (b) Dynamic wireless charging [29]; (c) Vision of the future smart city wireless charging system [30].

Figure 3.
Photographs of representative wireless charging products for EVs: (a) Plugless Power [36]; (b) WiTricity [37]; (c) Qualcomm Halo™ [38]; (d) Wireless charging system developed by APAS and HKPC.

Figure 4.
(a) Schematic diagram of smart power distribution [51]; (b) “Charging Pro” developed by APAS and HKPC.
Figure 4.
(a) Schematic diagram of smart power distribution [51]; (b) “Charging Pro” developed by APAS and HKPC.

Figure 5.
Concept of V2G and V2H [64].
Figure 5.
Concept of V2G and V2H [64].

Figure 6.
Representative V2G and V2H systems in different countries: (a) “Amsterdam Vehicle 2 Grid” system [69]; (b) Tesla’s Powerwall 2 [70]; (c) V2G-ready vehicle launched by Nissan [71]; (d) Smart V2H System developed by APAS and HKPC.

Figure 7.
Schematic diagram of CVs in a smart city [88].
Figure 7.
Schematic diagram of CVs in a smart city [88].

Figure 10.
Representative autonomous vehicles around the world: (a) Waymo autonomous vehicle [152]; (b) Hyundai autonomous vehicle tested in “K-City” [153]; (c) Autonomous shuttle at Nanyang Technological University [154]; (d) Baidu autonomous vehicle [155]; (e) UISEE autonomous vehicle [156]; (f) Autonomous shuttle developed by APAS and HKPC.
Figure 10.
Representative autonomous vehicles around the world: (a) Waymo autonomous vehicle [152]; (b) Hyundai autonomous vehicle tested in “K-City” [153]; (c) Autonomous shuttle at Nanyang Technological University [154]; (d) Baidu autonomous vehicle [155]; (e) UISEE autonomous vehicle [156]; (f) Autonomous shuttle developed by APAS and HKPC.


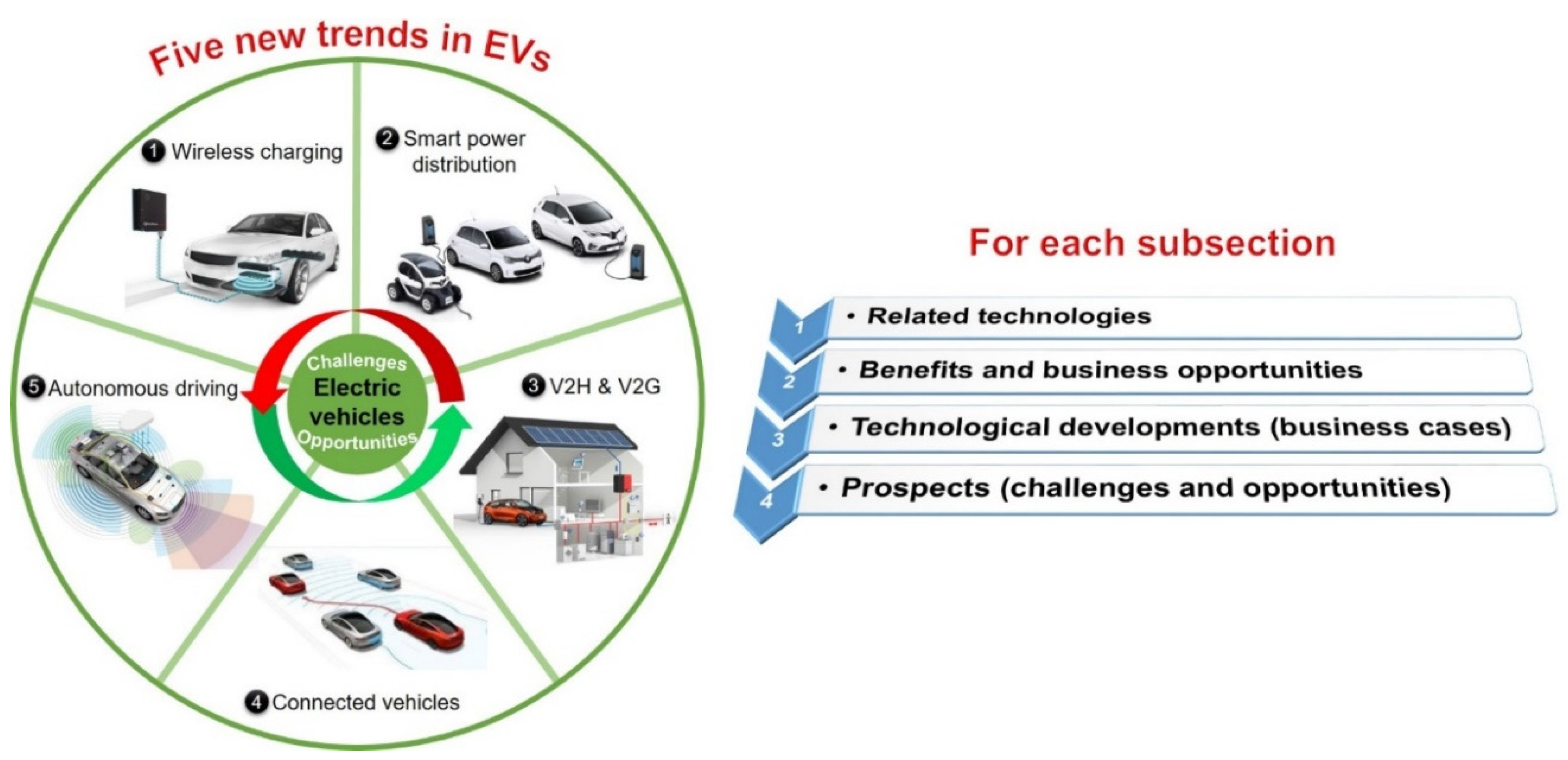{kind=link}
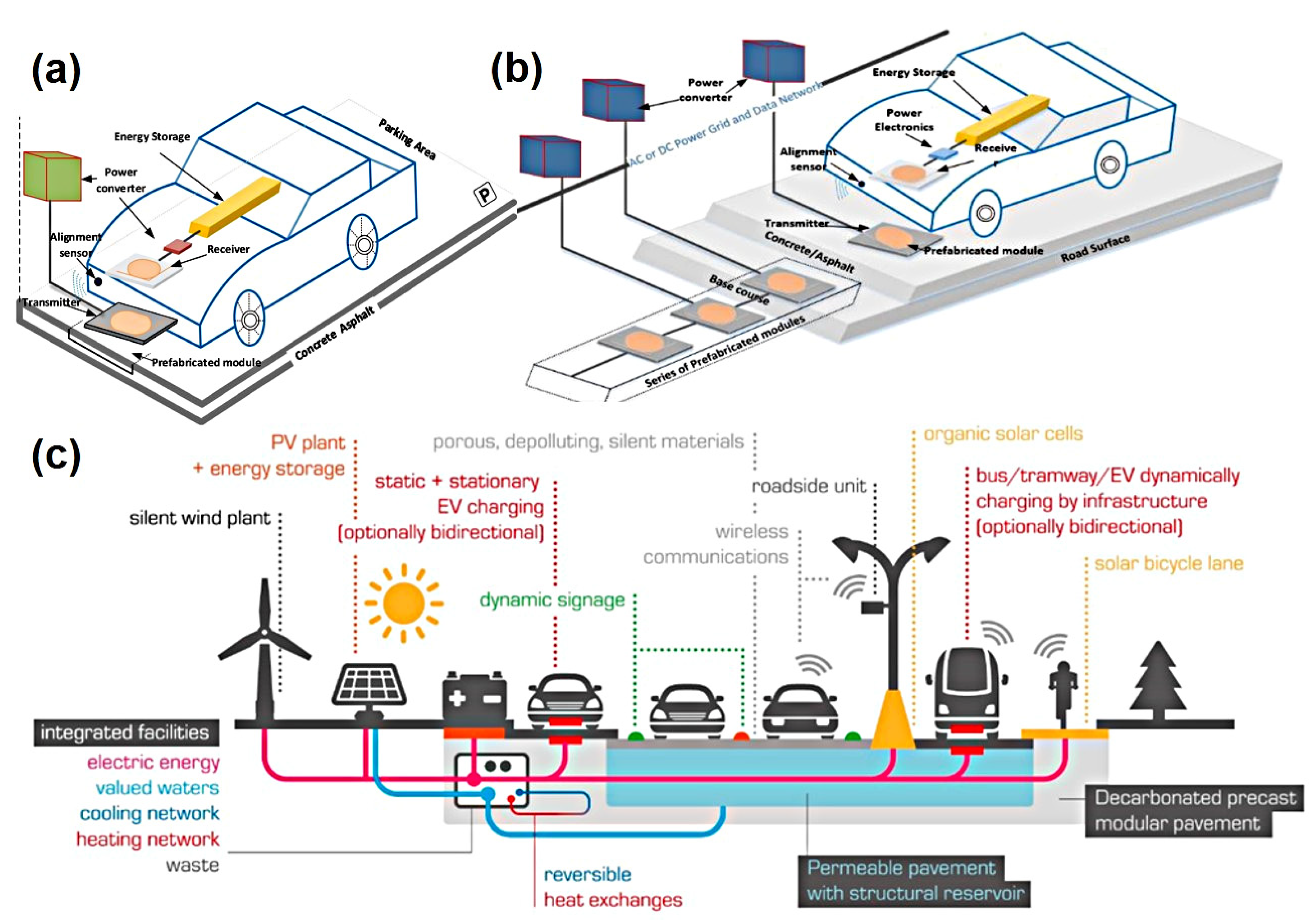{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
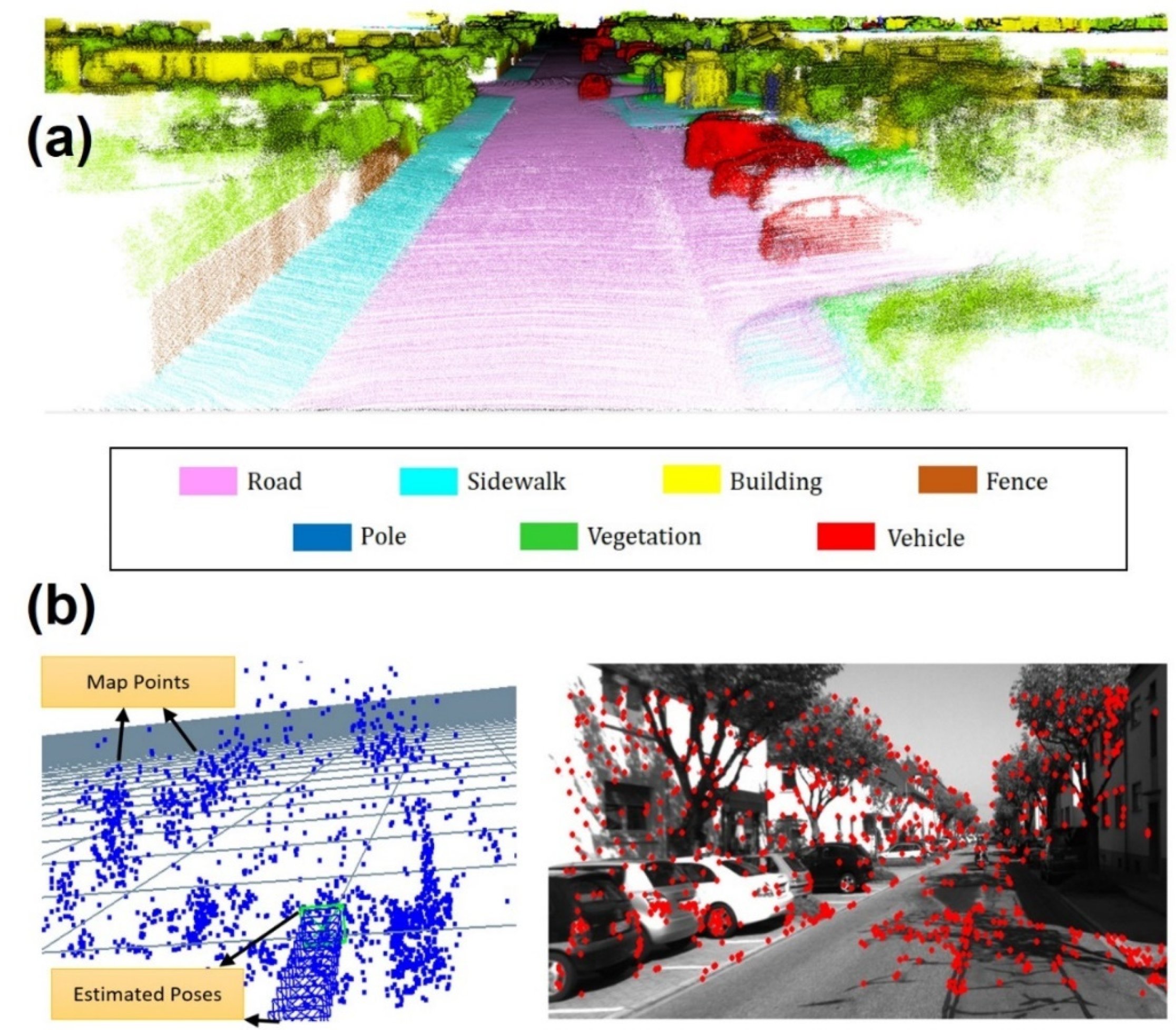{kind=link}
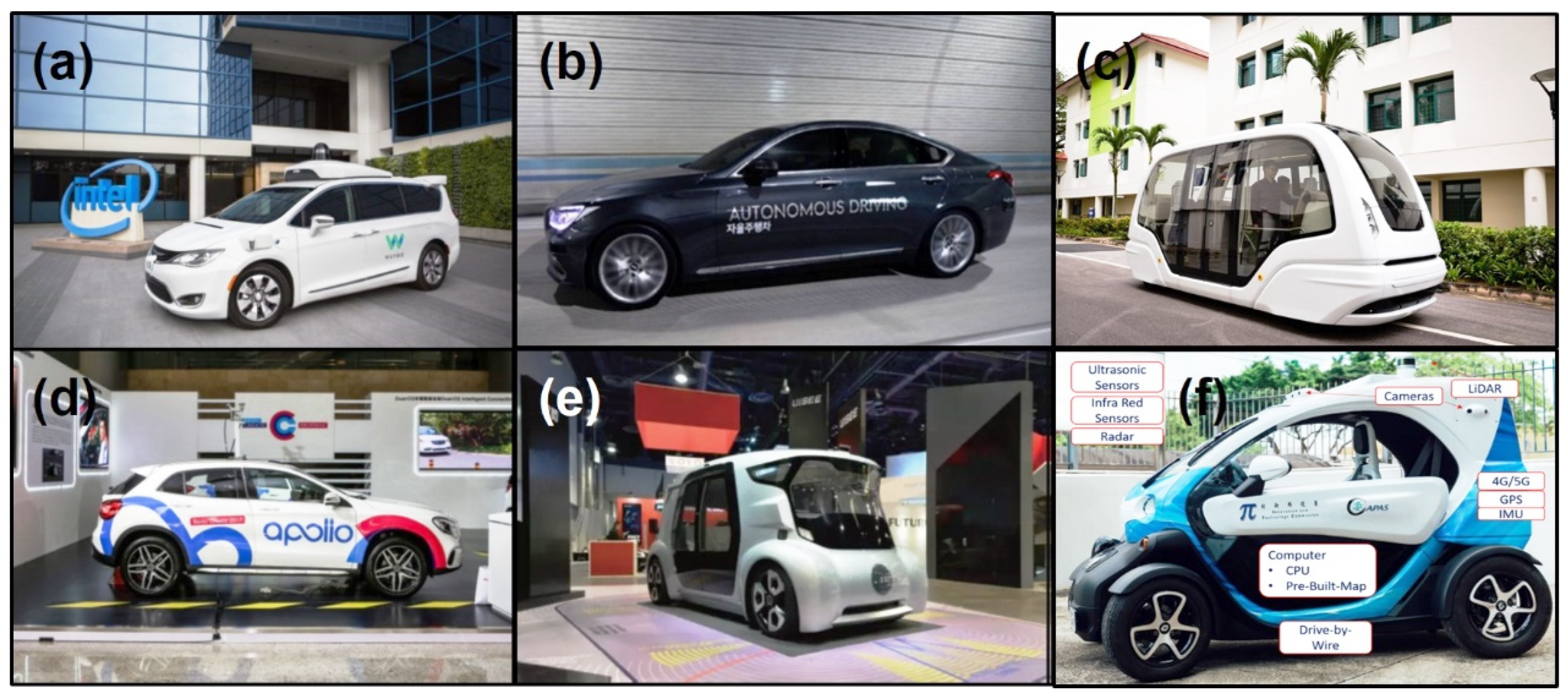{kind=link}
Table 1.
Summary of challenges and opportunities of application of wireless charging in EVs [46].
Table 1.
Summary of challenges and opportunities of application of wireless charging in EVs [46].
| Challenges | Opportunities |
|---|---|
| Misalignment tolerance of the charger | Application and development of new materials |
| Timing of high-speed power transfer | Extended range and battery life in EVs |
| Multiple vehicles charging on each transmitter | Development of autonomous driving |
| Charger life and durability under real conditions | Renewable energy storage |
| Impact of grid | Frequency control at the grid connection |
| High cost of infrastructure construction and large-scale deployment | Cost reduction for EVs |
| Interoperability between multiple manufacturers | Cost reduction and environmental benefits |
| Incentives | |
| Fast charging | |
| Universal standards |
Table 2.
Summary of challenges and opportunities of application of smart power distribution for EVs [59].
Table 2.
Summary of challenges and opportunities of application of smart power distribution for EVs [59].
| Challenges | Opportunities |
|---|---|
| Market framework | New market models that enable active and reactive EV distribution service systems, such as load shifting, peak shaving, valley filling, voltage regulation, and reactive power control at the distribution system level |
| Economic aspects | Economic evaluations, including aspects such as benefit analysis for all stakeholders and possible remuneration strategies for service providers |
| Battery degradation | Integration of battery degradation costs with changes in charging/discharging strategies |
Table 3.
Summary of challenges and opportunities of V2G and V2H for EVs [81].
Table 3.
Summary of challenges and opportunities of V2G and V2H for EVs [81].
| Challenges | Opportunities |
|---|---|
| Battery degradation | Integration of battery degradation costs with the change in the charging/discharging strategies |
| Cyber attacks | New technologies that enhance the resiliency of the V2G and V2H systems against cyber–physical attacks and new security standards |
| Time delay | Large bandwidth communication channels such as LAN, and WAN networks |
| Stability issues | Development of robust controllers |
Table 4.
Summary of challenges and opportunities of application of CVs in EVs [89].
Table 4.
Summary of challenges and opportunities of application of CVs in EVs [89].
| Challenges | Opportunities |
|---|---|
| CV interoperability | Integration of blockchain with CVs |
| CV trustworthiness | Reliability, resilience, safety, security, and privacy improvement of CVs |
| Efficient wireless resource allocation in CVs | Application and development of artificial intelligence (AI) and machine learning techniques in CVs |
Table 5.
Summary of challenges and opportunities of application of autonomous driving in EVs [158].
Table 5.
Summary of challenges and opportunities of application of autonomous driving in EVs [158].
| Challenges | Opportunities |
|---|---|
| Limited physics-based models | Data-based models and hybrid models |
| Lack of controllers for arbitrary situations | Fully applicable methods for numerical control design that can accommodate uncertainties and discover approximately optimal or even feasible solutions under real-time operation constraints |
| Decision-making algorithms in autonomous vehicles, from powertrain control-loops to autonomous driving functionality | Development of large V2X systems and learning-based components (e.g., neural networks) |
| Ensuring high reliability and low cost and complexity | Improved resilience against sensor and actuator failures, communication dropouts, and cyber attacks |
| A lot of uncertainty regarding the deployment of autonomous vehicles in terms of what levels of automation will be introduced to public roads and when | Construction of new physical and cyber infrastructure |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Mo, T.; Li, Y.; Lau, K.-t.; Poon, C.K.; Wu, Y.; Luo, Y. Trends and Emerging Technologies for the Development of Electric Vehicles. Energies 2022, 15, 6271. https://doi.org/10.3390/en15176271
AMA Style
Mo T, Li Y, Lau K-t, Poon CK, Wu Y, Luo Y. Trends and Emerging Technologies for the Development of Electric Vehicles. Energies. 2022; 15(17):6271. https://doi.org/10.3390/en15176271
Chicago/Turabian StyleMo, Tiande, Yu Li, Kin-tak Lau, Chi Kin Poon, Yinghong Wu, and Yang Luo. 2022. "Trends and Emerging Technologies for the Development of Electric Vehicles" Energies 15, no. 17: 6271. https://doi.org/10.3390/en15176271
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.