Performance Assessment of an Islanded Hybrid Power System with Different Storage Combinations Using an FPA-Tuned Two-Degree-of-Freedom (2DOF) Controller


 , and
, and
Abstract
:1. Introduction
- (a)
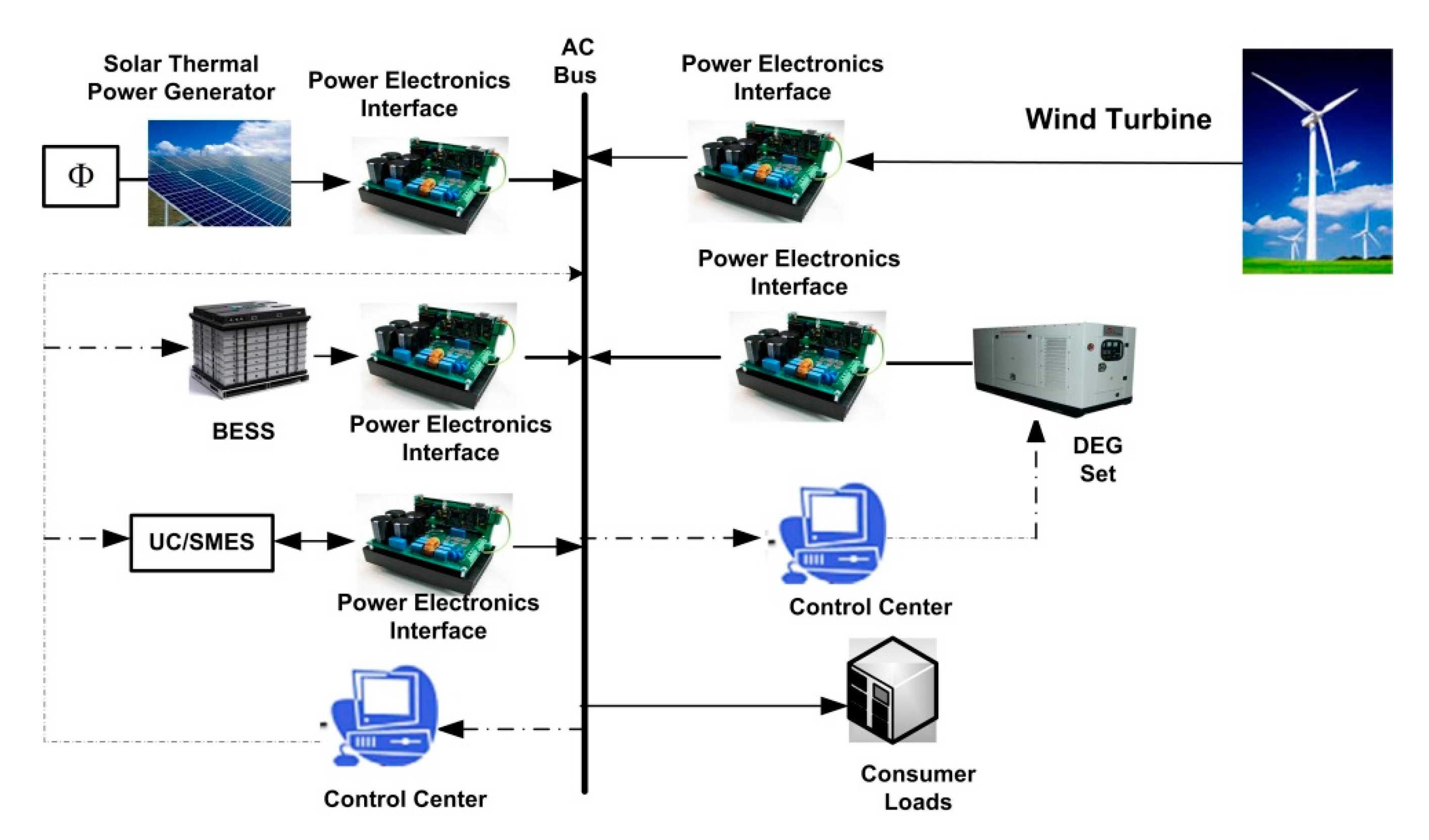
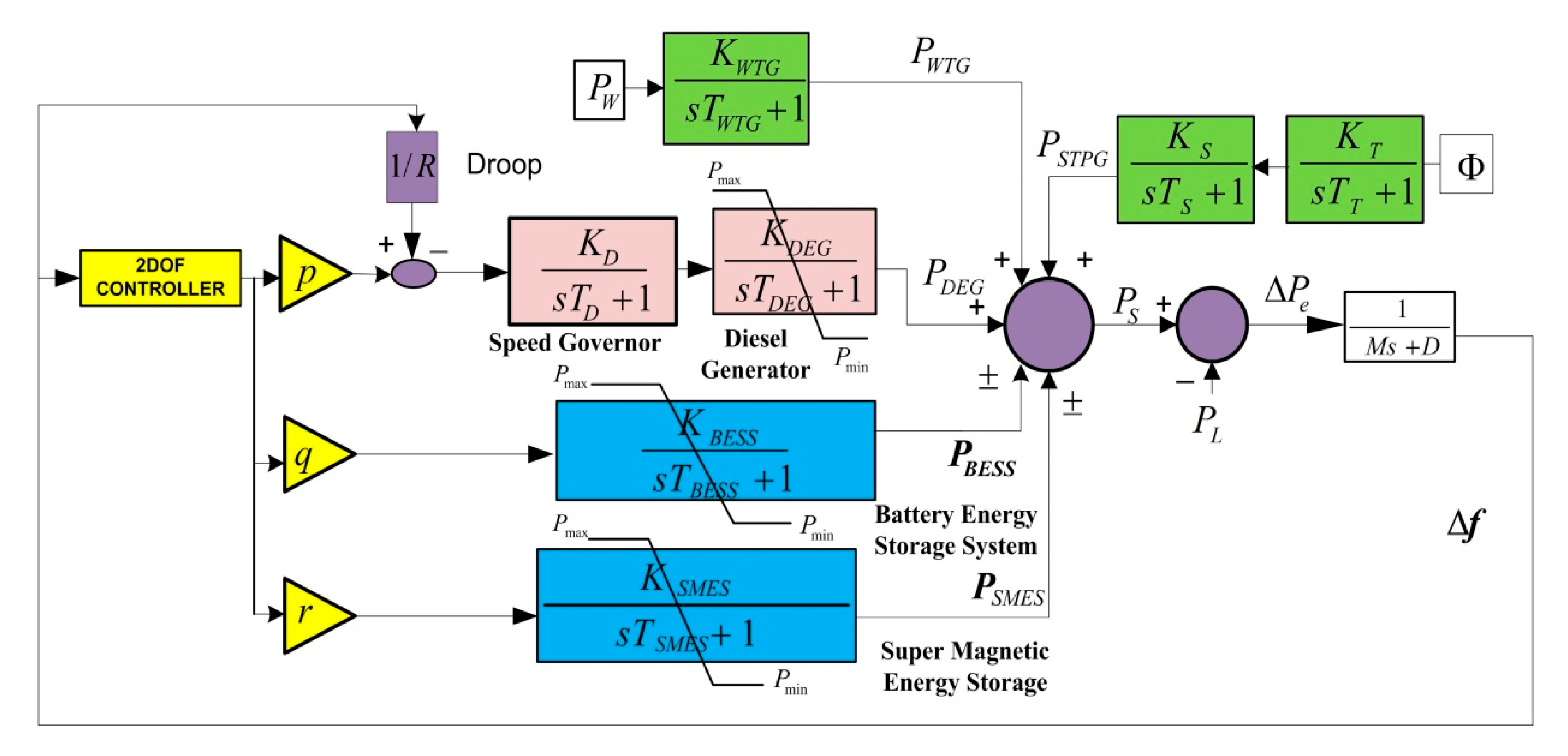
- To investigate the dynamic behavior of PI, PID, 2DOF PI, and 2DOF PID controllers in time-domain simulations of a WTG-STPG-DEG-based autonomous hybrid energy system with the following ESS combinations: (i) only BESS, (ii) BESS + UC, and (iii) BESS + SMES.
- (b)
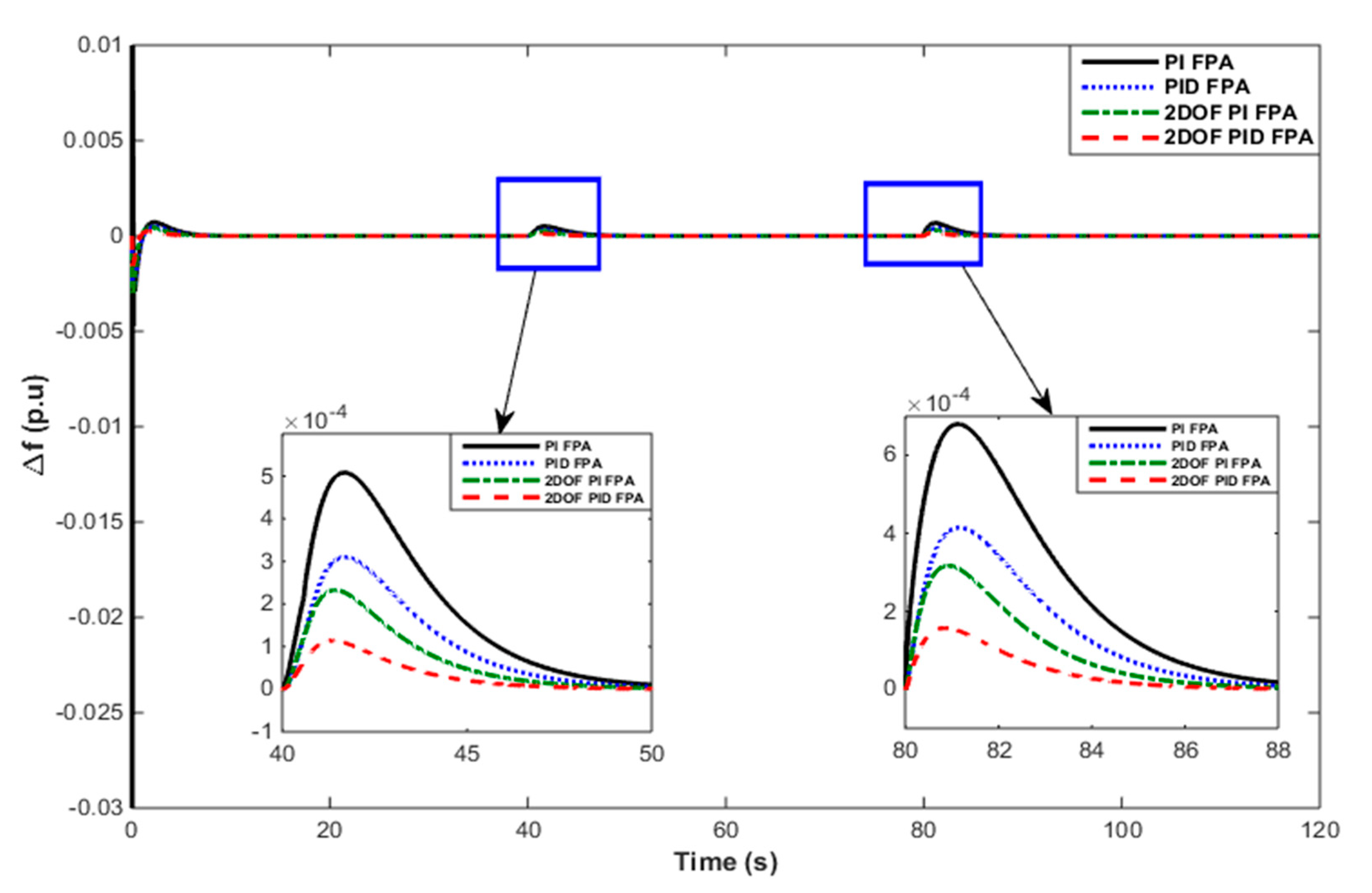
- To optimize the gains of the PI, PID, 2DOF PI, and 2DOF PID controllers using the heuristic FPA and to investigate their comparative dynamic performance on the proposed system for all three cases.
- (c)
- To study the dynamic responses of the FPA-tuned 2DOF PI and 2DOF PID controllers compared with their PI and PID counterparts for regulating the system frequency deviation during the disturbances of the sub-components, i.e., load, renewable power generations, or all of the above cases.
- (d)
- To compare the performance of the hybrid system model in terms of the frequency deviation in two different energy storage combinations, i.e., UC + BESS-based model compared with a BESS-based model.
- (e)
- To assess the similar performance between combined use of the SMES + BESS model compared with an only BESS-based hybrid system model.
- (f)
- Finally, to analyze the performance of the SMES + BESS-based hybrid energy system in contrast to the UC + BESS-based hybrid energy system regarding mitigating power fluctuations.
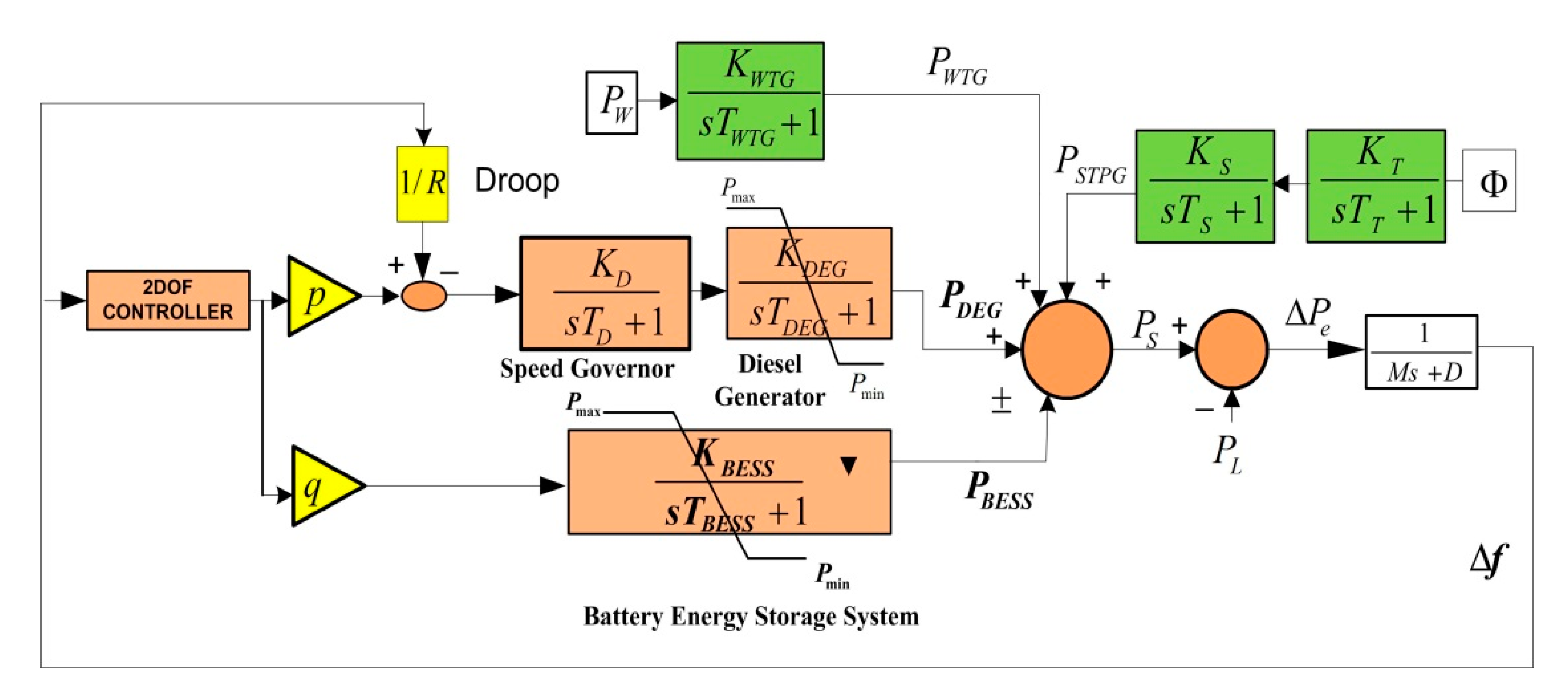
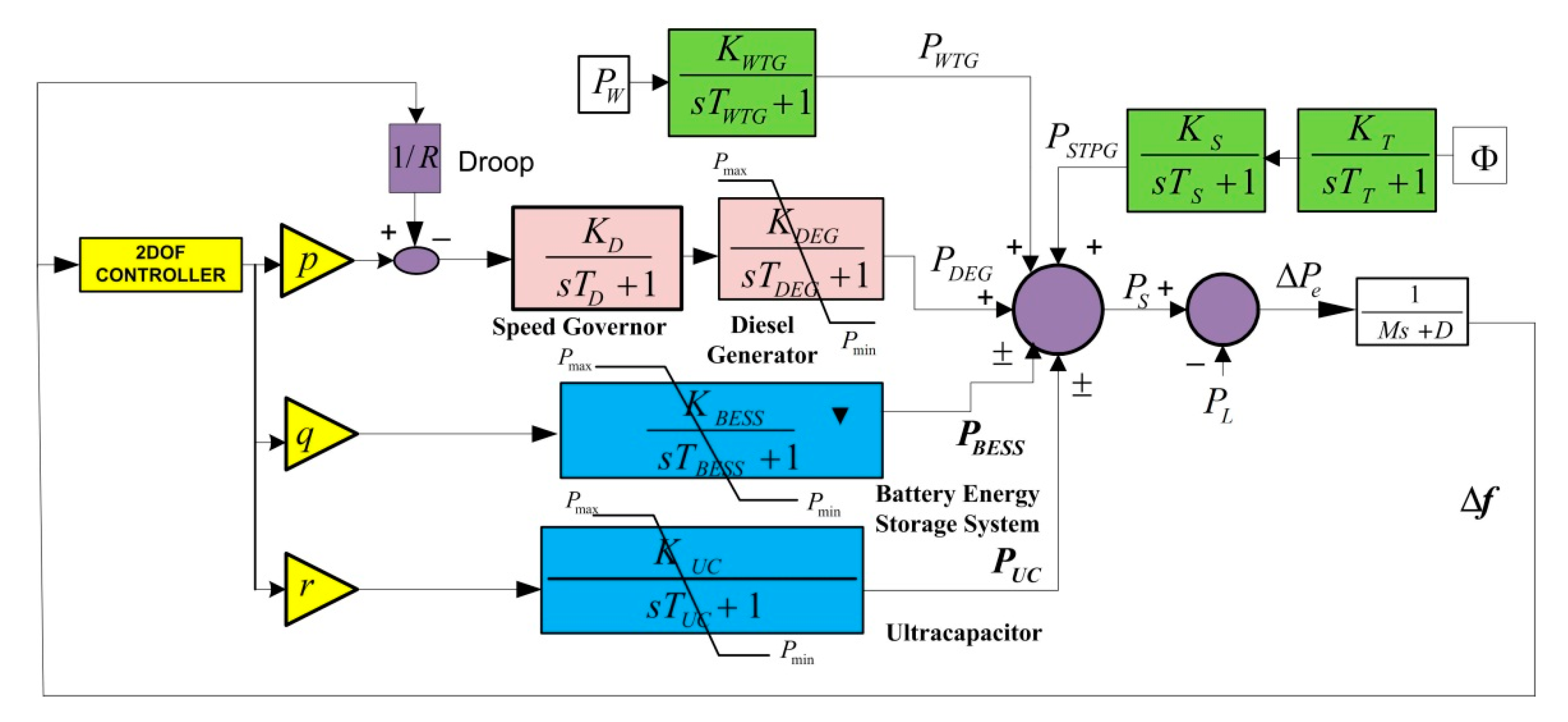
2. Investigated Islanded Hybrid Power System
3. Objective Problem Formulation
4. Flower Pollination Algorithm
- (a)
- The global pollination approach by enabling two biotic cross-pollinations with the distribution of the pollinators followed by Levy flights.
- (b)
- Consideration of abiotic self-pollination to lead toward local pollination.
- (c)
- The reproduction probability of a flower pollination approach is directly proportional to the similarity factor between the two engaged flowers.
- (d)
- A switching probability factor Ps {0, 1} is utilized to contain the local and global pollination approach.
5. Results and Analysis
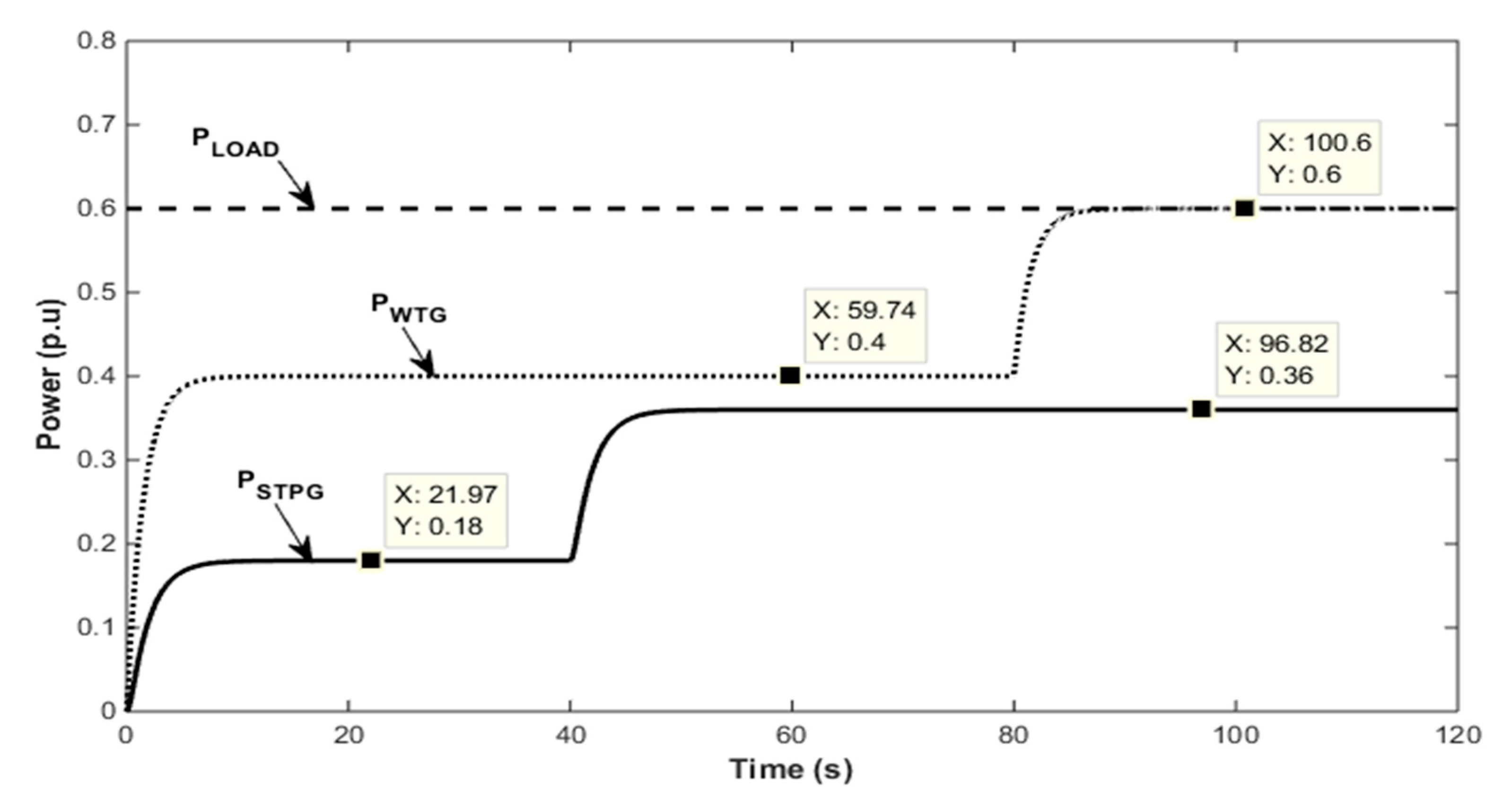
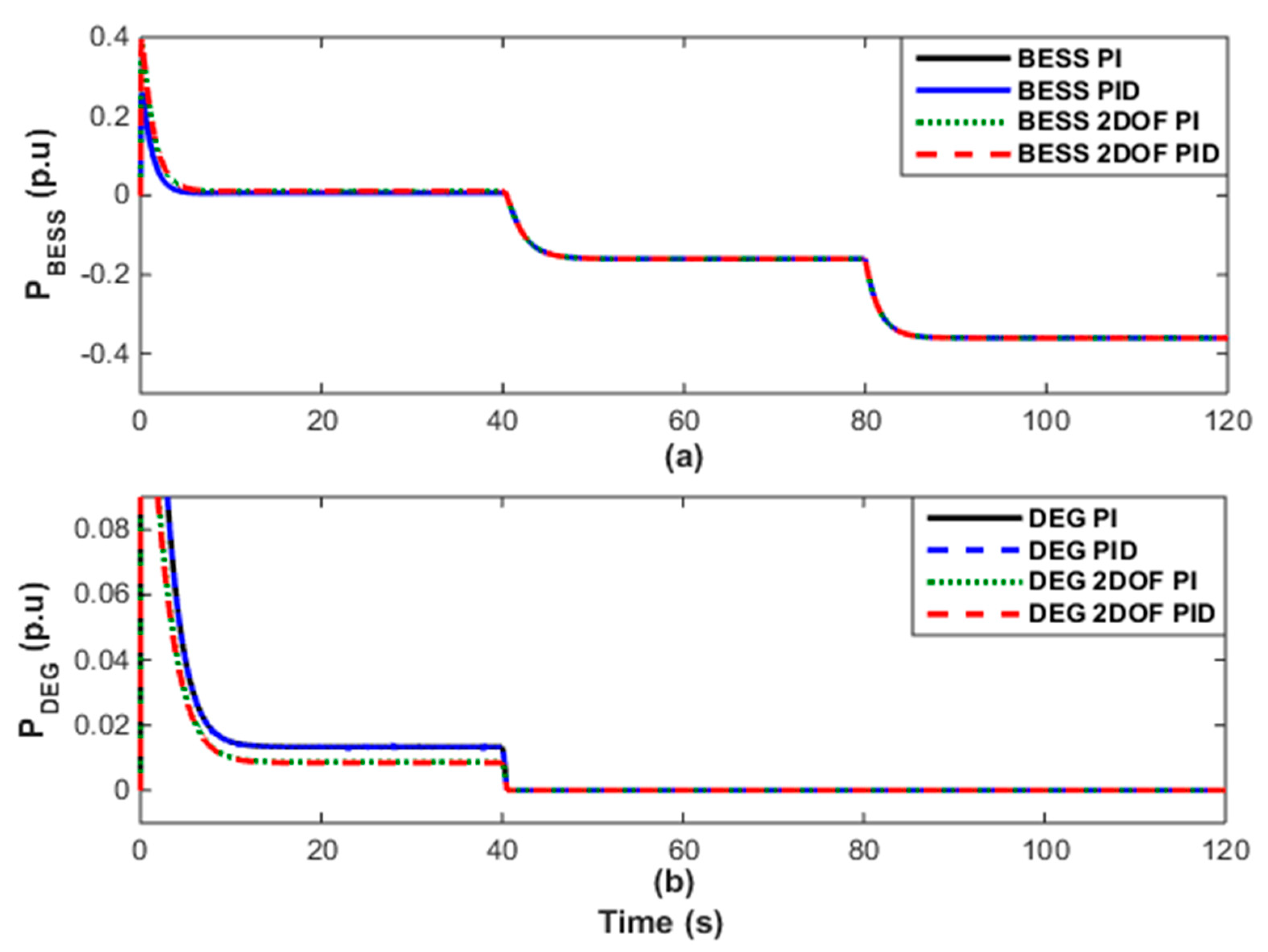
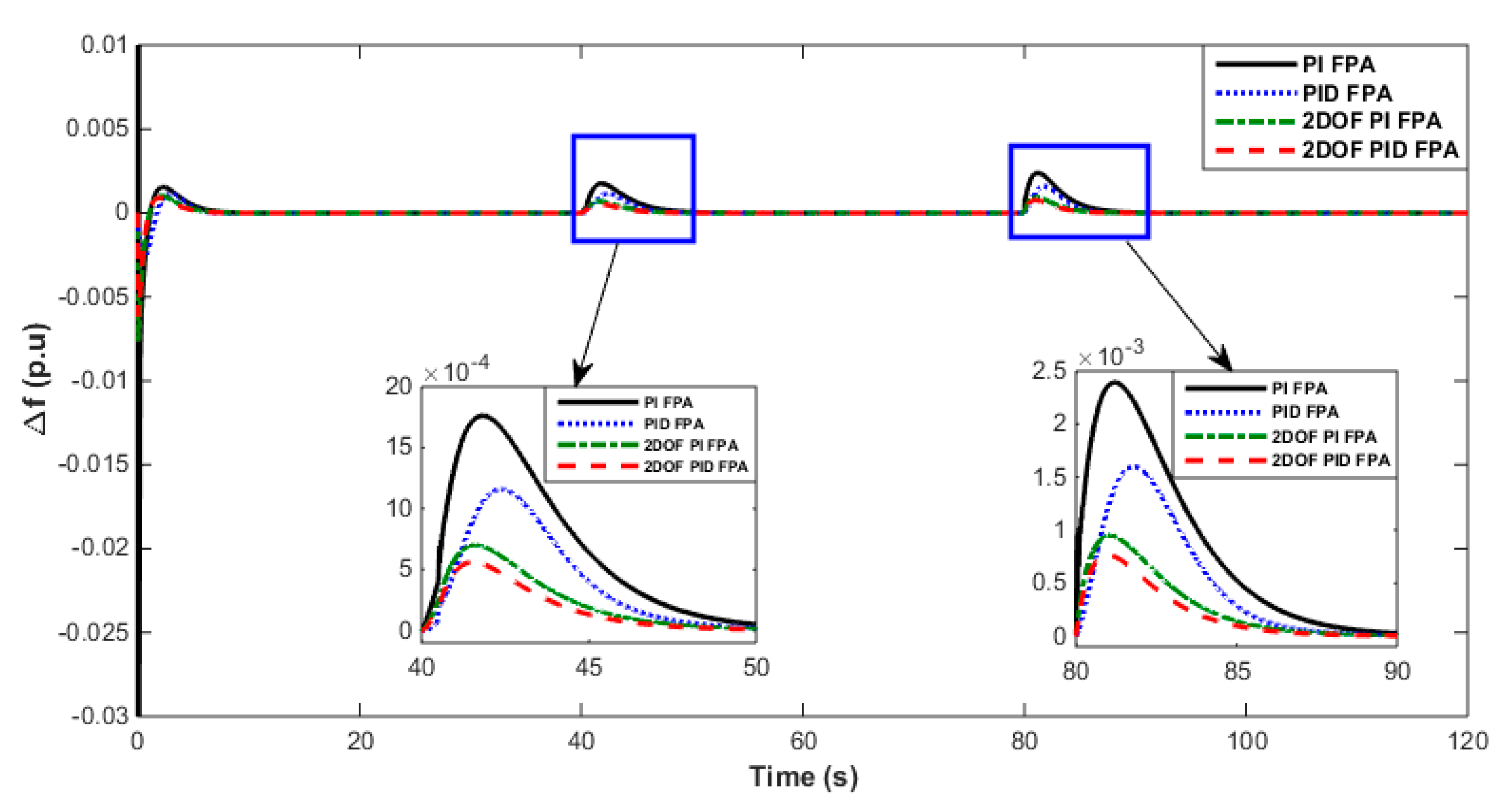
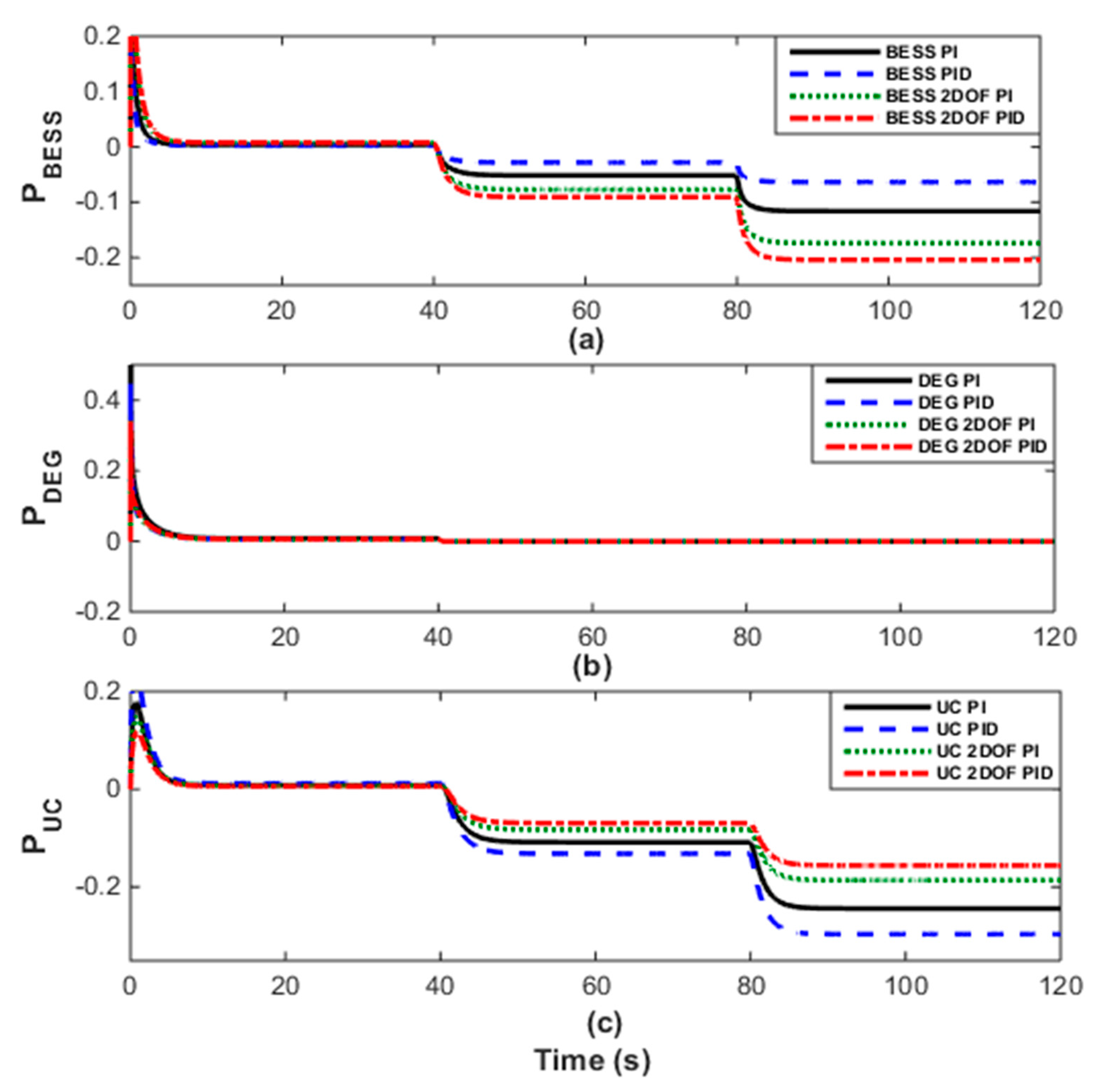
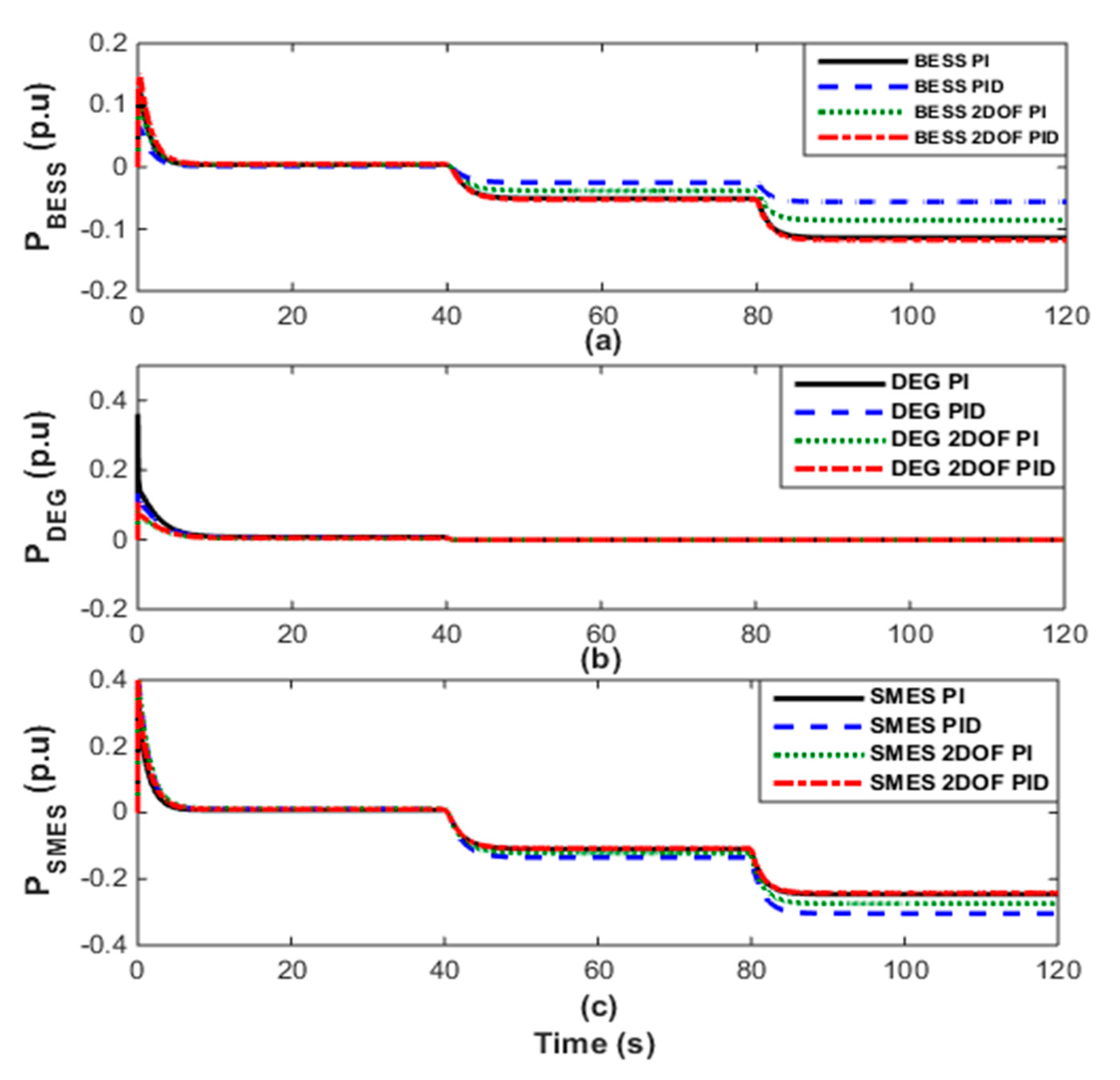
5.1. Time-Domain Response Analysis: Case 1
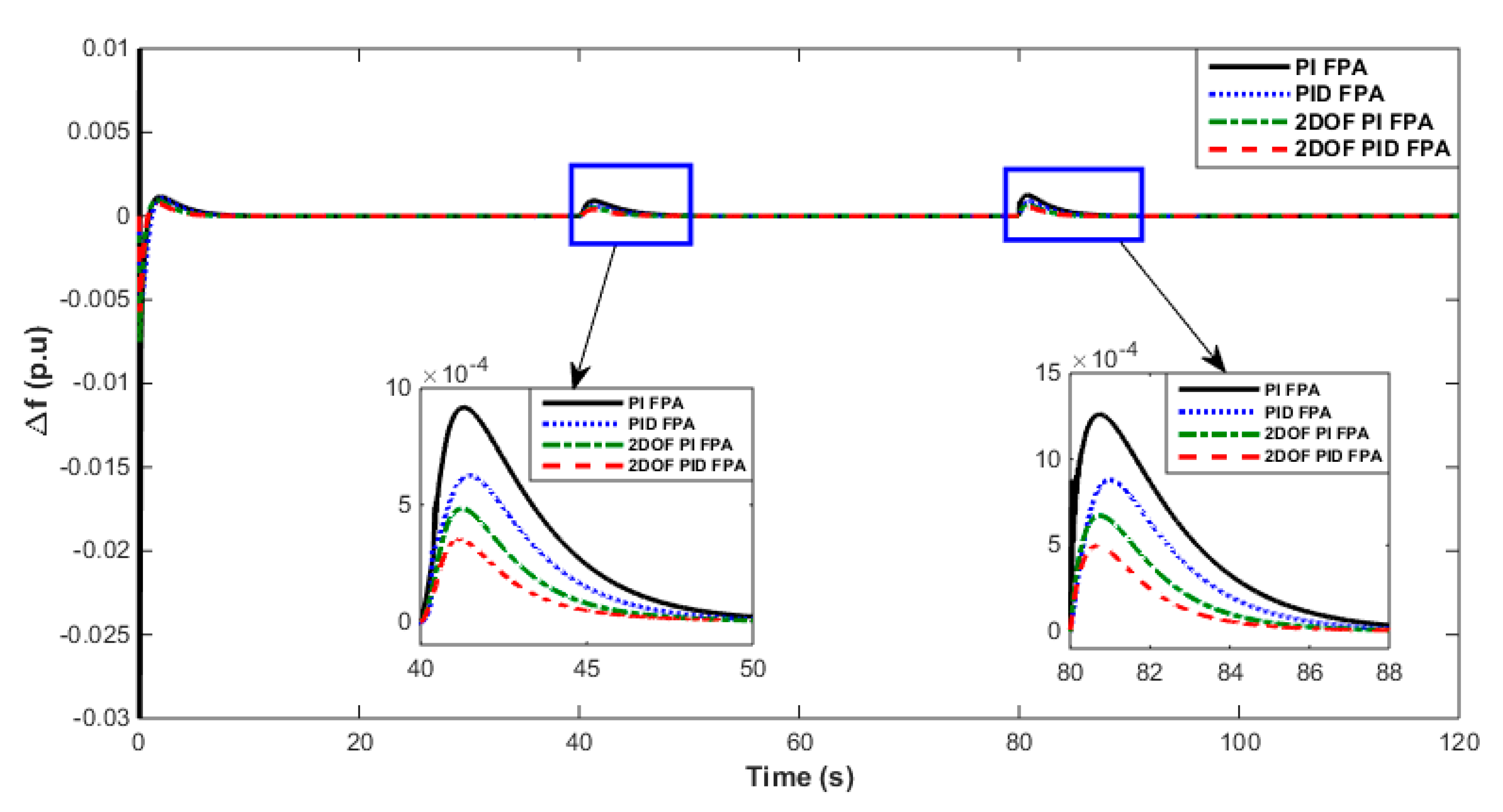
5.2. Time-Domain Response Analysis: Case 2
5.3. Time-Domain Response Analysis: Case 3
5.4. Comparative Performance of the Frequency Responses of the Above Three Cases
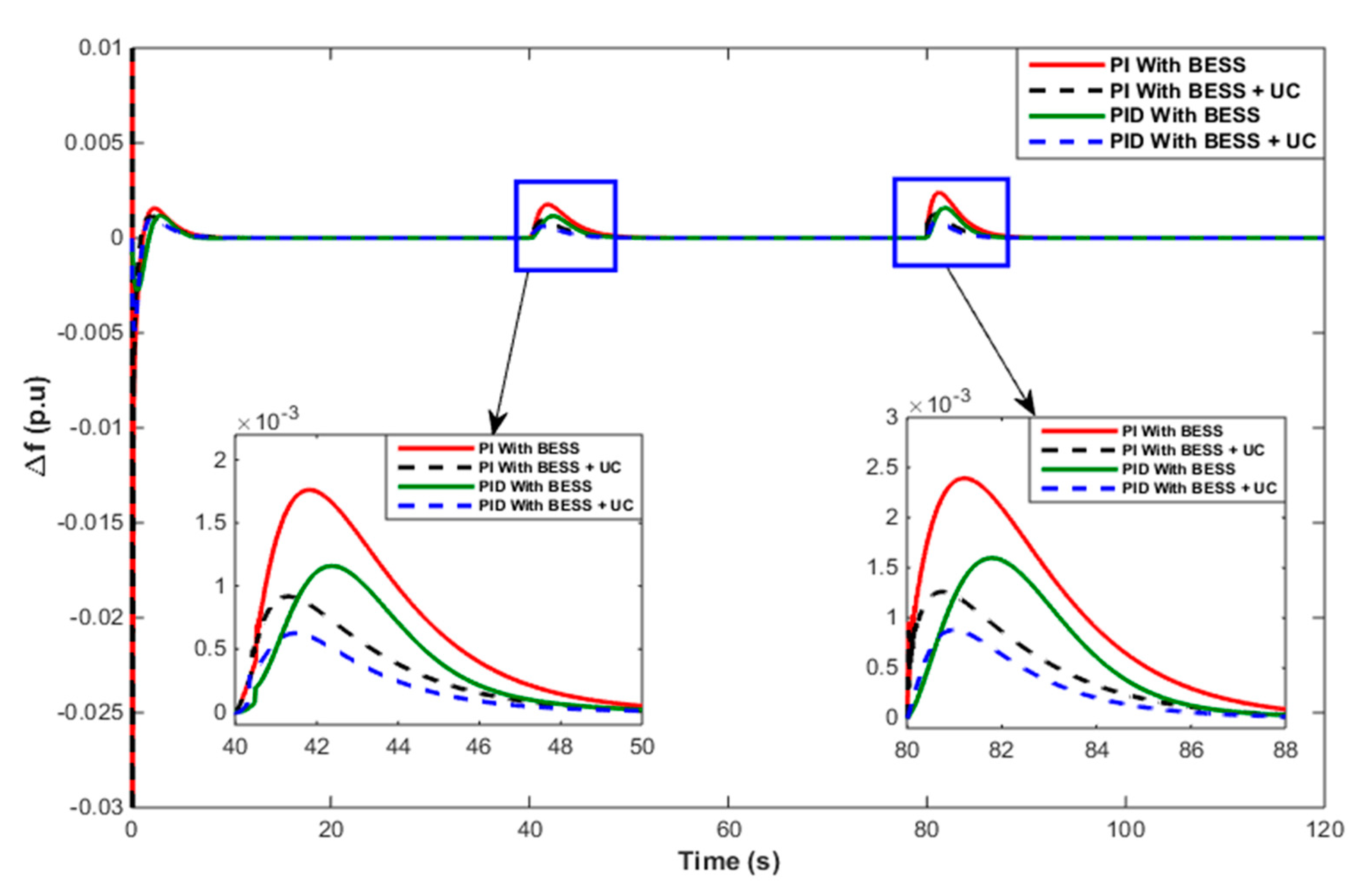
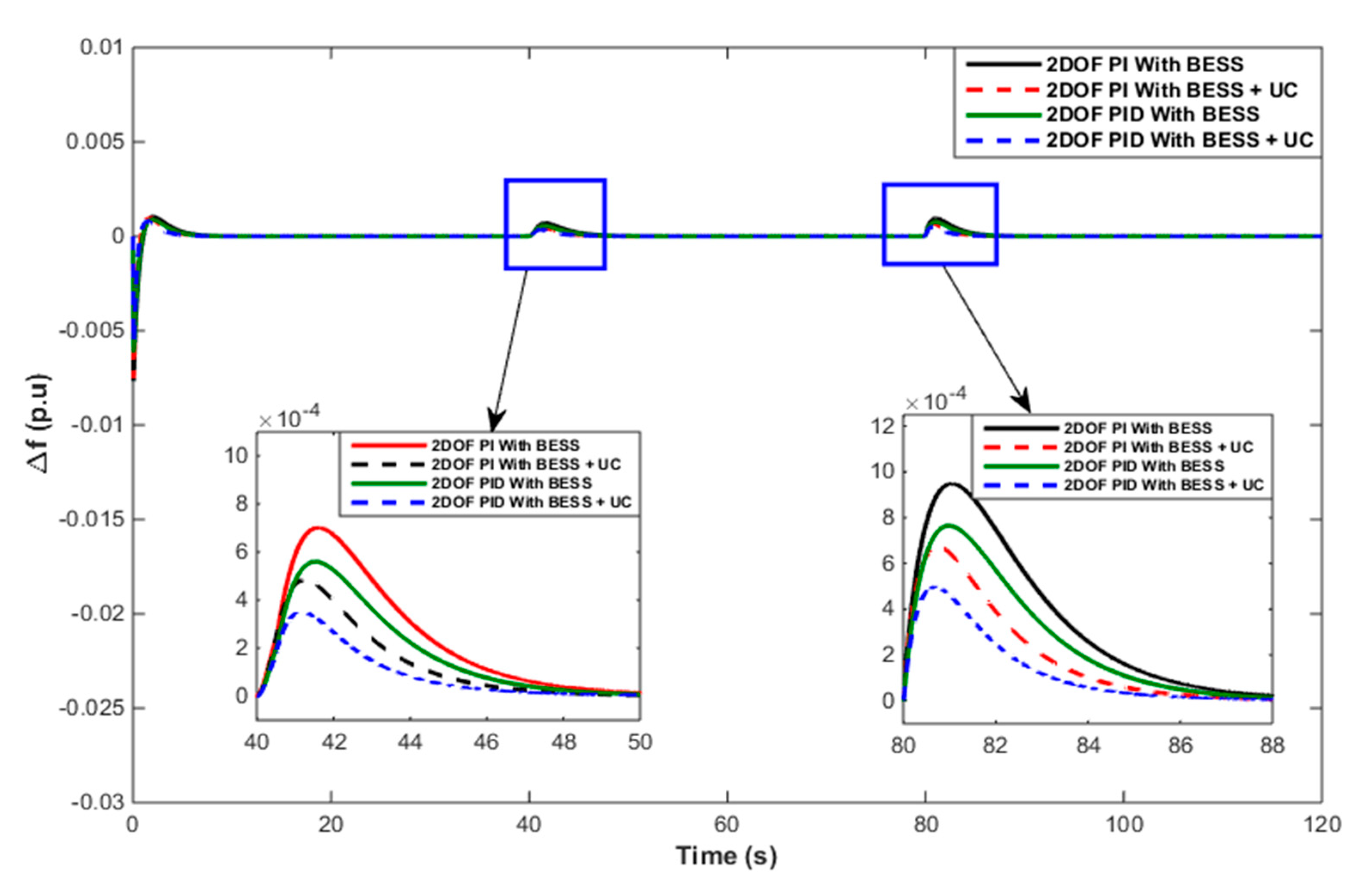
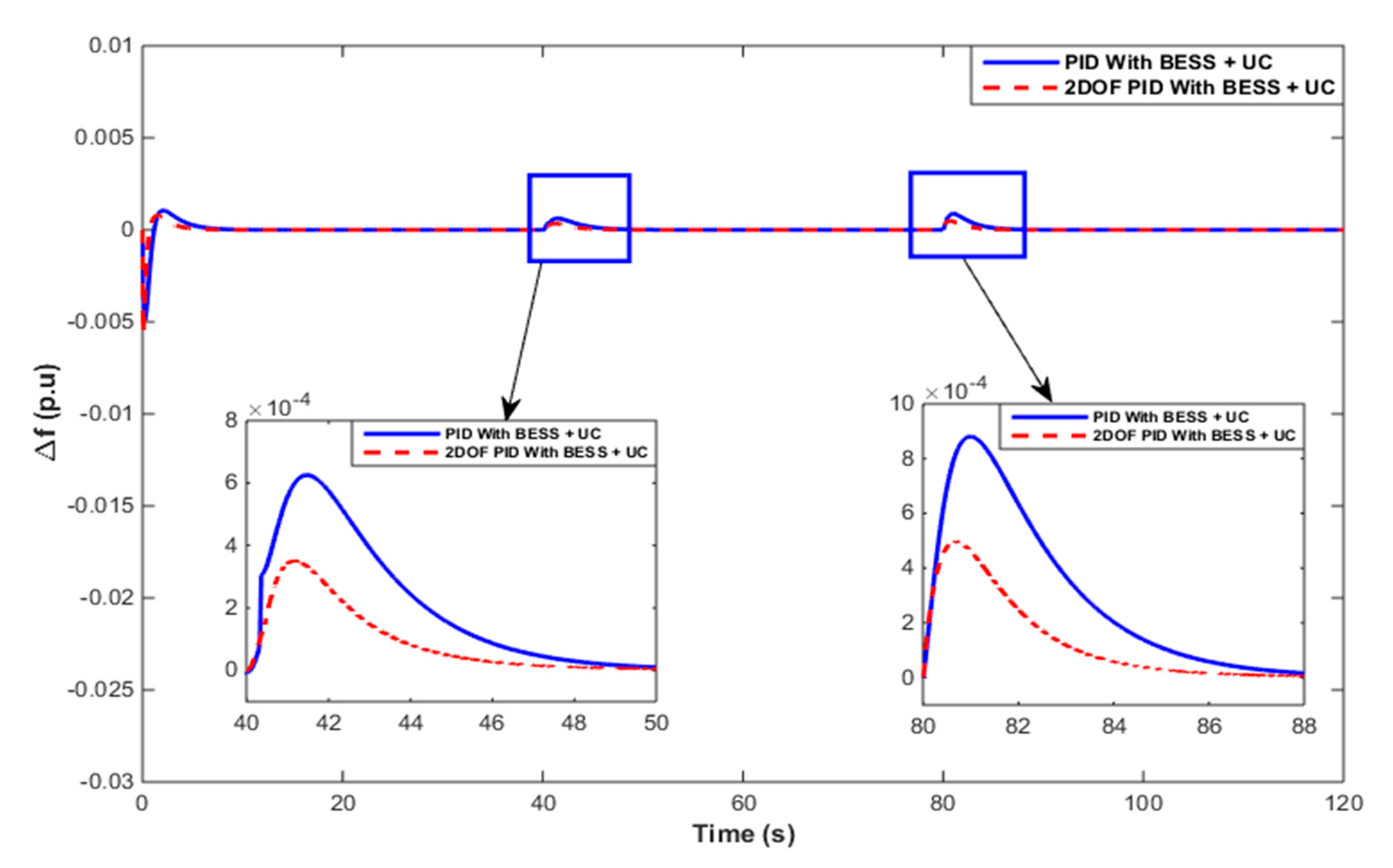
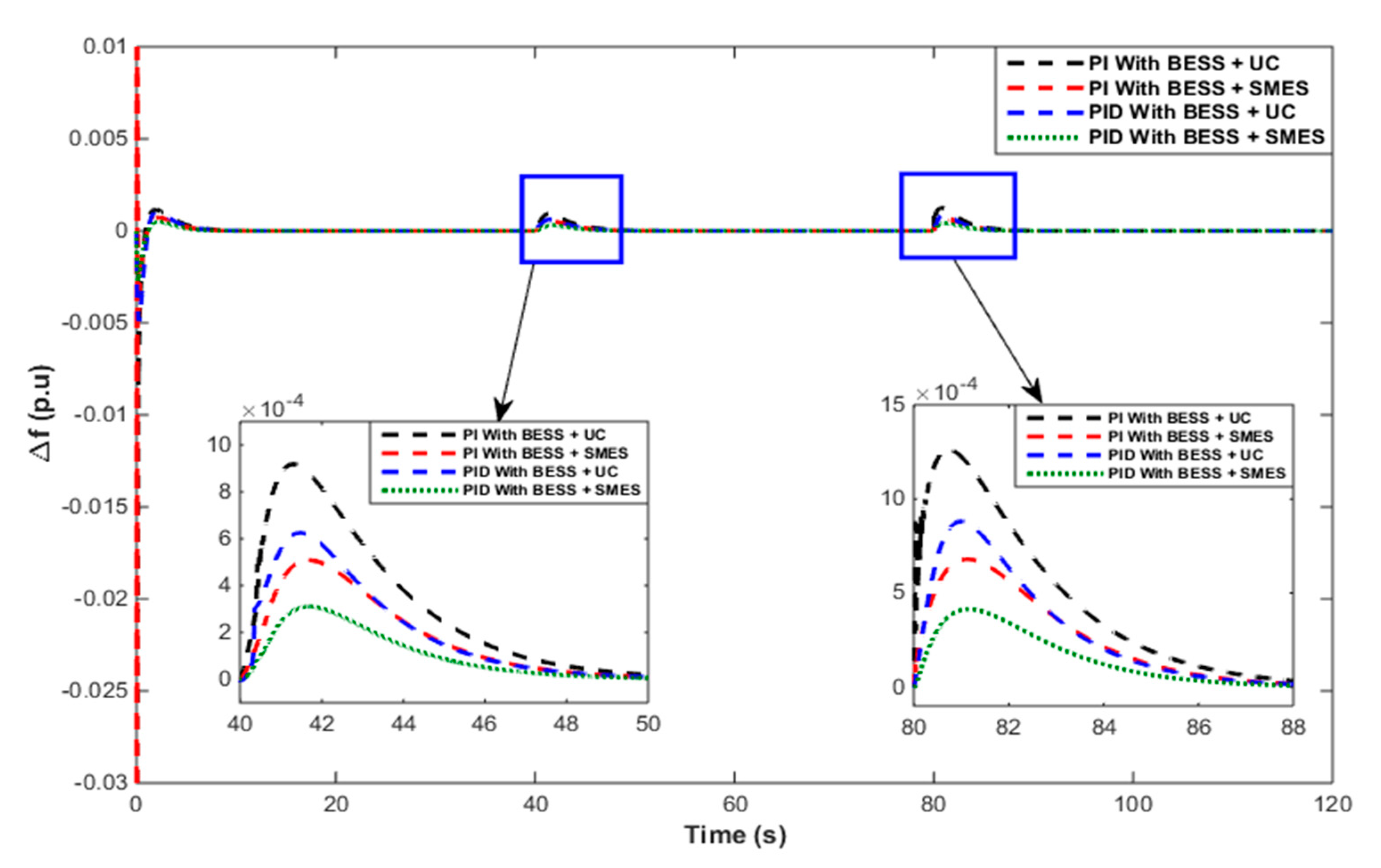
5.4.1. Frequency Response of BESS (Case 1) vs. BESS + UC (Case 2)
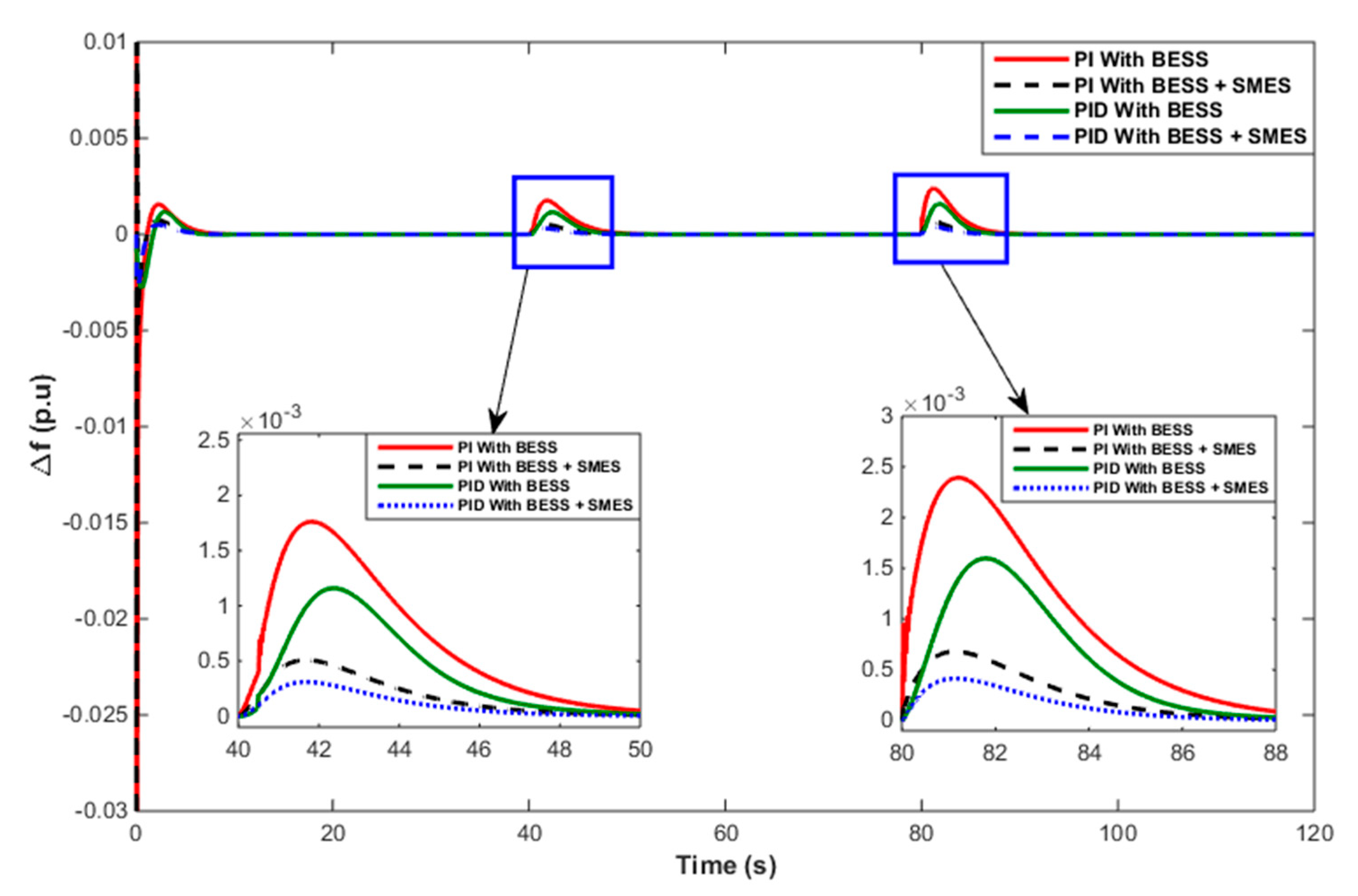
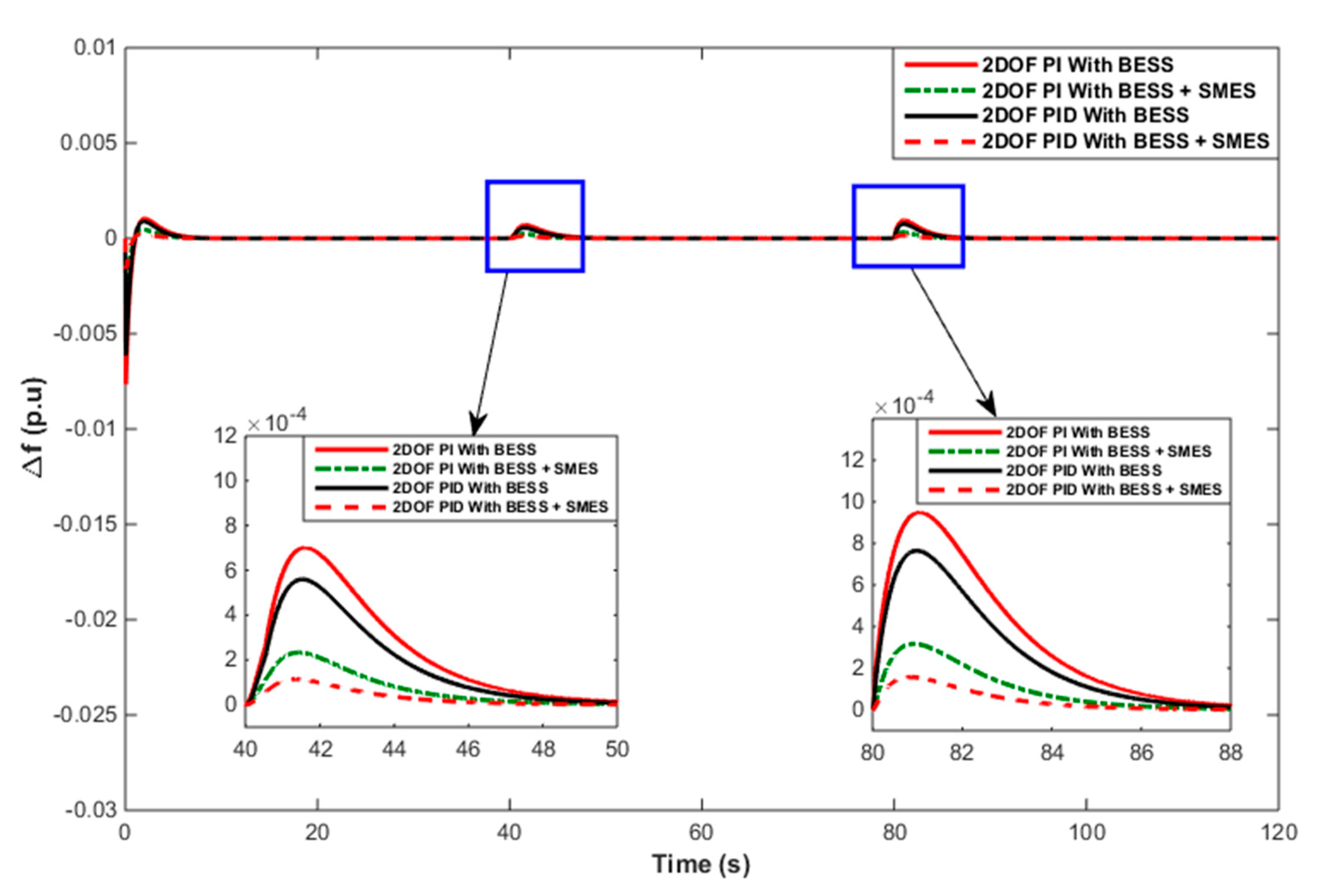
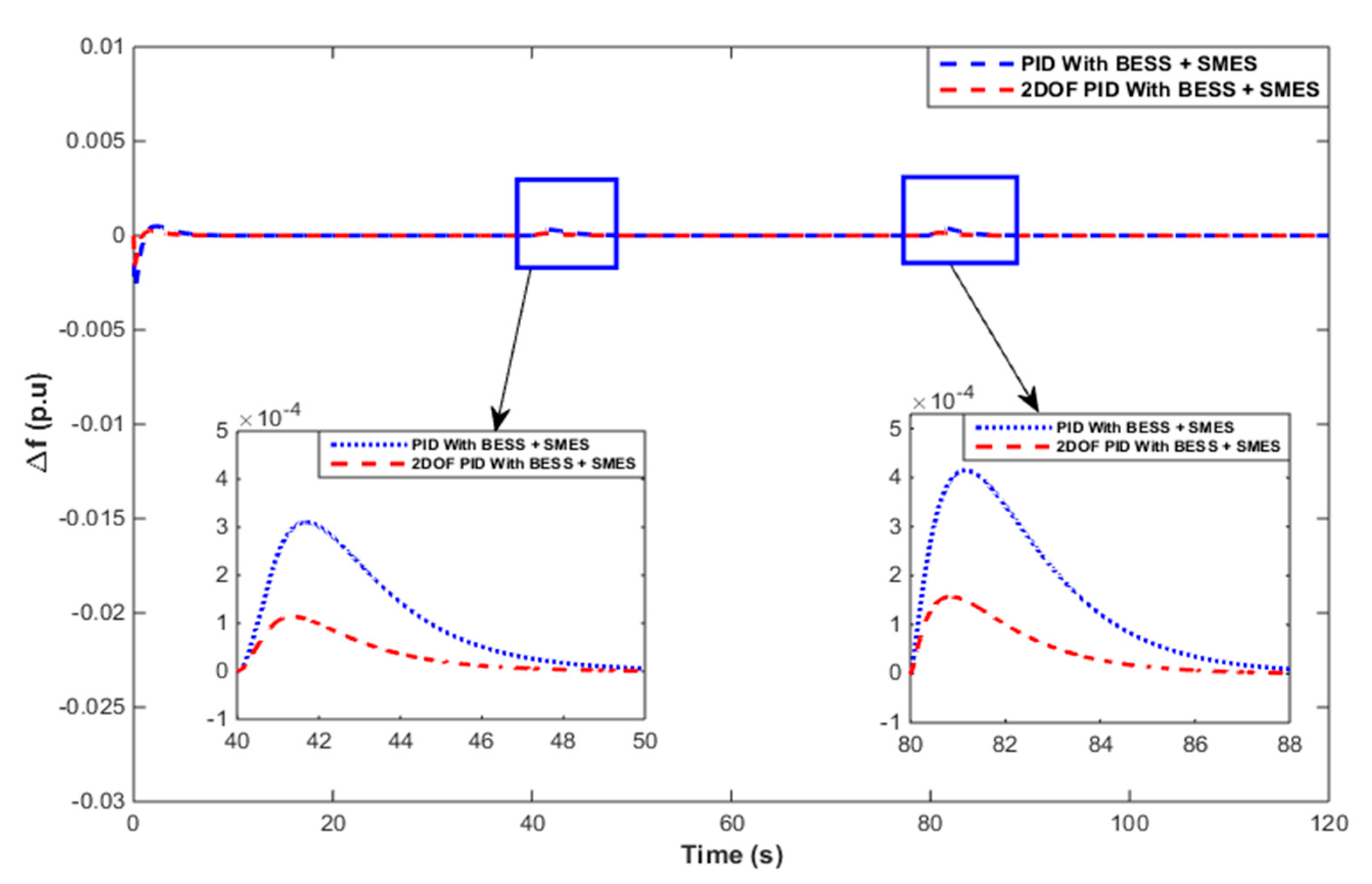
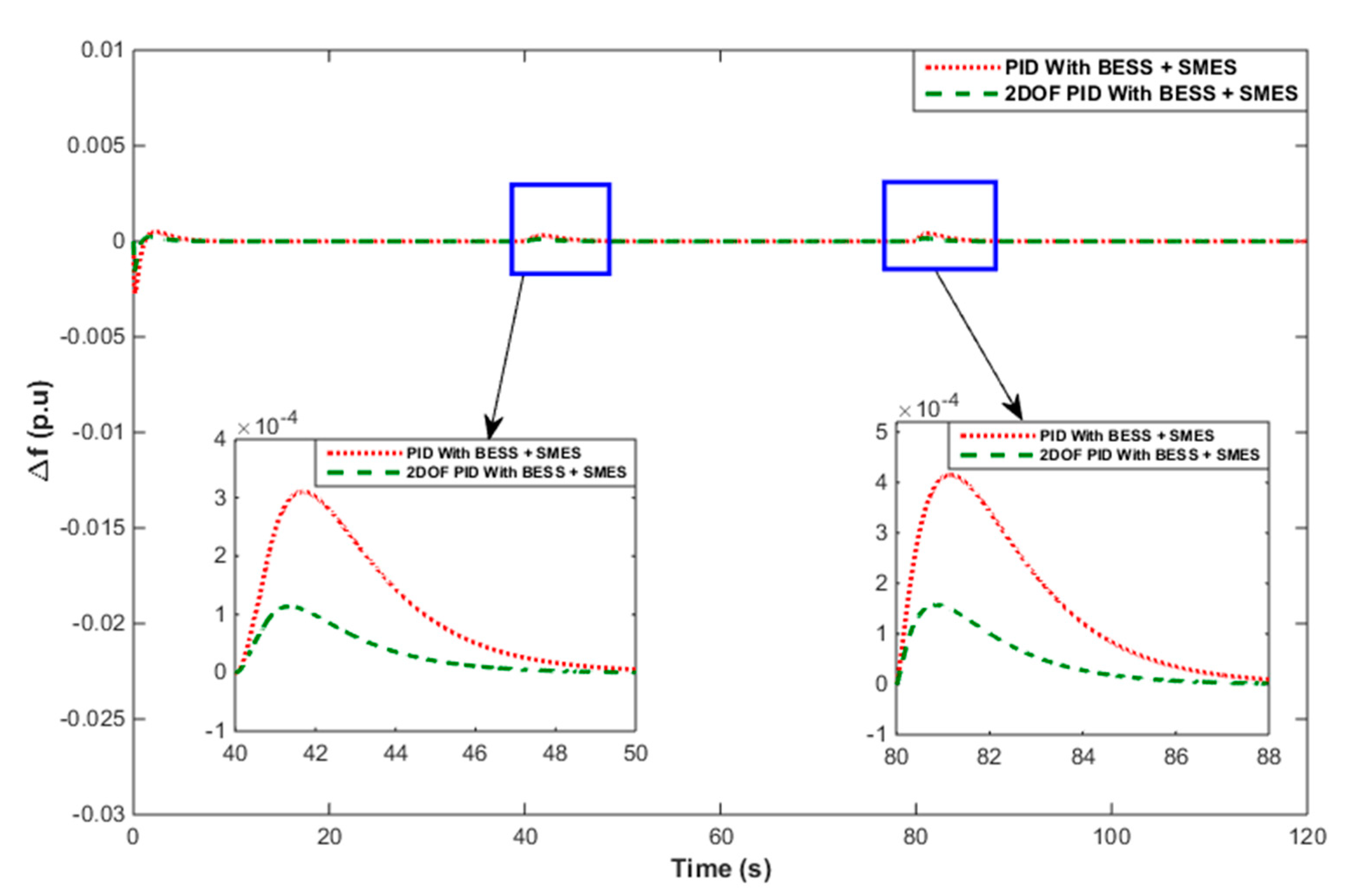
5.4.2. Frequency Response of BESS (Case 1) vs. BESS + SMES (Case 3)
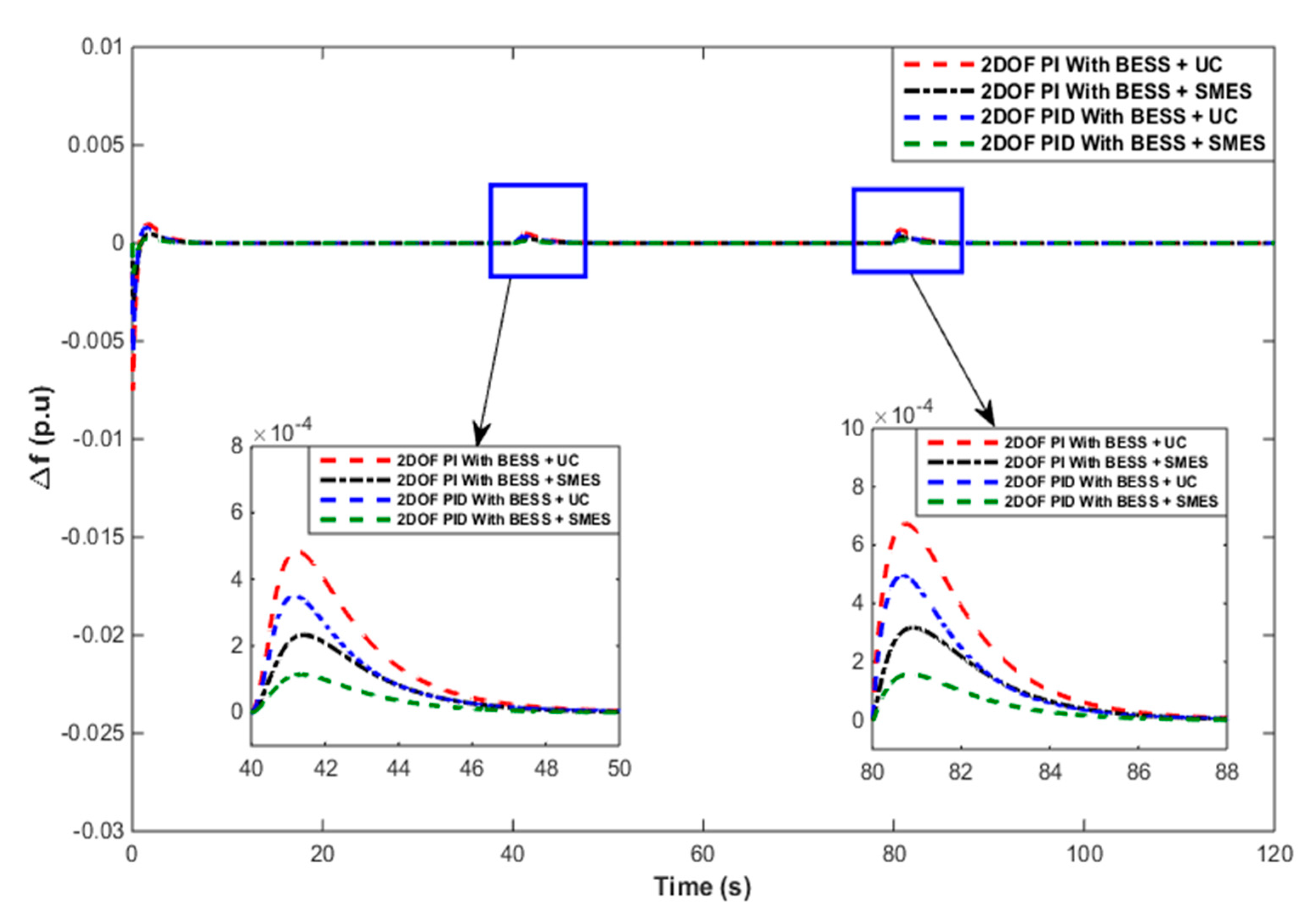
5.4.3. Frequency Response of BESS + UC (Case 2) vs. BESS + SMES (Case 3)
6. Conclusions
- (a)
- It was observed that the response of the FPA-optimized 2DOF PID controller was superior to the PI, PID, and 2DOF-PI controllers due to decision parameters such as the peak transient deviation and settling time.
- (b)
- The assessment of the responses of the hybrid system model for only BESS compared with UC + BESS under the same operating conditions showed that the UC + BESS-based hybrid system model performed better than the only BESS-based model. At the same time, the 2DOF PID controller provided a superior result compared with the other controllers.
- (c)
- Furthermore, the comparative performances of the only BESS-based hybrid system model against the SMES + BESS-based hybrid system model under the same operating conditions indicated that the SMES + BESS-based hybrid system model performed better than the only BESS-based model. Furthermore, the 2DOF PID controller performed better than the other controllers.
- (d)
- However, the comparative performances of the BESS + UC-based hybrid system model against the SMES + BESS-based hybrid system model under the same operating conditions revealed that the SMES + BESS-based hybrid system model performed better than the BESS + UC-based model. Here, the performance assessment of the various controllers revealed the superiority of the 2DOF PID controller.
- (e)
- It was observed that the response of the FPA-optimized 2DOF PID controller was superior compared with the PI, PID, and 2DOF PI controllers due to decision parameters such as the peak transient deviation and settling time.
- (f)
- Finally, it was concluded that despite uncertainties or disturbances in the input due to the wind or the ORC low-temperature solar thermal system, a single controller with appropriate gains could maintain the system frequency within the acceptable limits. The use of a single controller is expected to reduce the costs while preserving the stability and reliability of the supply and system.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ORC | Organic Rankine cycle |
| ESS | Energy storage system |
| UC | Ultracapacitor unit |
| WTG | Wind generator |
| BESS | Battery |
| SMES | Super magnetic energy storage |
| 2DOF | Two-degree-of-freedom |
| STPG | Solar thermal power generation |
| FPA | Flower pollination algorithm |
| DEG | Diesel generation |
| PI | Proportional-integral |
| PID | Proportional-integral-derivative |
| Δf | Change in frequency deviation |
| J | Objective function |
References
- Almeshqab, F.; Ustun, T.S. Lessons learned from rural electrification initiatives in developing countries: Insights for technical, social, financial and public policy aspects. Renew. Sustain. Energy Rev. 2019, 102, 35–53. [Google Scholar] [CrossRef]
- Quoilin, S.; Orosz, M.; Hemond, H.; Lemort, V. Performance and design optimization of a low-cost solar organic Rankine cycle for remote power generation. Sol. Energy 2011, 85, 955–966. [Google Scholar] [CrossRef] [Green Version]
- Tchanche, B.F.; Lambrinos, G.; Frangoudakis, A.; Papadakis, G. Low-grade heat conversion into power using organic Rankine cycles-A review of various applications. Renew. Sustain. Energy Rev. 2011, 15, 3963–3979. [Google Scholar] [CrossRef]
- Tocci, L.; Pal, T.; Pesmazoglou, I.; Franchetti, B. Small Scale Organic Rankine Cycle (ORC): A Techno-Economic Review. Energies 2017, 10, 413. [Google Scholar] [CrossRef]
- Nadeem, F.; Hussain, S.M.S.; Tiwari, P.K.; Goswami, A.K.; Ustun, T.S. Comparative Review of Energy Storage Systems, Their Roles, and Impacts on Future Power Systems. IEEE Access 2019, 7, 4555–4585. [Google Scholar] [CrossRef]
- Das, D.C.; Roy, A.K.; Sinha, N. GA based frequency controller for solar thermal–diesel–wind hybrid energy generation/energy storage system. Int. J. Electr. Power Energy Syst. 2012, 43, 262–279. [Google Scholar] [CrossRef]
- Latif, A.; Pramanik, A.; Das, D.C.; Hussain, I.; Ranjan, S. Plug in hybrid vehicle-wind-diesel autonomous hybrid power system: Frequency control using FA and CSA optimized controller. Int. J. Syst. Assur. Eng. Manag. 2018, 9, 1147–1158. [Google Scholar] [CrossRef]
- Barik, A.; Das, D.C. Expeditious frequency control of solar photobiotic/biogas/biodiesel generator based isolated renewable microgrid using grasshopper optimisation algorithm. IET Renew. Power Gener. 2018, 12, 1659–1667. [Google Scholar] [CrossRef]
- Javed, K.; Ashfaq, H.; Singh, R.; Hussain, S.M.S.; Ustun, T.S. Design and Performance Analysis of a Stand-alone PV System with Hybrid Energy Storage for Rural India. Electronics 2019, 8, 952. [Google Scholar] [CrossRef] [Green Version]
- Ranjan, S.; Das, D.C.; Behera, S.; Sinha, N. Parabolic trough solar–thermal–wind–diesel isolated hybrid power system: Active power/ frequency control analysis. IET Renew. Power Gener. 2018, 12, 1893–1903. [Google Scholar] [CrossRef]
- Latif, A.; Hussain, S.M.S.; Das, D.C.; Ustun, T.S. Optimum Synthesis of a BOA Optimized Novel Dual-Stage PI − (1 + ID) Controller for Frequency Response of a Microgrid. Energies 2020, 13, 3446. [Google Scholar] [CrossRef]
- Onar, O.C.; Uzunoglu, M.; Alam, M.S. Modeling, control and simulation of an autonomous wind turbine/photovoltaic/fuel cell/ultra-capacitor hybrid power system. J. Power Sources 2008, 185, 1273–1283. [Google Scholar] [CrossRef]
- Uzunoglu, M.; Onar, O.C.; Alam, M.S. Modeling, control and simulation of a PV/FC/UC based hybrid power generation system for stand-alone applications. Renew. Energy 2009, 34, 509–520. [Google Scholar] [CrossRef]
- Tammineedi, C. Modeling Battery-Ultracapacitor Hybrid Systems for Solar. Ph.D. Thesis, The Pennsylvania State University, State College, PA, USA, 2011. [Google Scholar]
- Lin, W.; Zheng, C. Energy management of a fuel cell/ultracapacitor hybrid power system using an adaptive optimal-control method. J. Power Sources 2011, 196, 3280–3289. [Google Scholar] [CrossRef]
- Shin, D.; Kim, Y.; Seo, J.; Chang, N.; Wang, Y.; Pedram, M. Battery-supercapacitor hybrid system for high-rate pulsed load applications. In Design, Automation & Test in Europe Conference & Exhibition; IEEE: Piscataway Township, NJ, USA, 2011; pp. 1–4. [Google Scholar]
- Singh, V.P.; Mohanty, S.R.; Kishor, N.; Ray, P.K. Robust H-infinity load frequency control in hybrid distributed generation system. Int. J. Electr. Power Energy Syst. 2013, 46, 294–305. [Google Scholar] [CrossRef]
- Attia, A.E.F.; Mohammed, A.E.H. Efficient frequency controllers for autonomous two-area hybrid microgrid system using social-spider optimizer. IET Gener. Transm. Distrib. 2017, 11, 637–648. [Google Scholar]
- Mazurenko, I.; Pavlyuk, A.; Vasetsky, Y. Application of superconducting magnetic energy storage (SMES) in electric power grids. In Proceedings of the Computational Problems of Electrical Engineering (CPEE), 2015 16th International Conference on IEEE, Lviv, Ukraine, 2–5 September 2015; pp. 113–115. [Google Scholar]
- Das, D.C.; Sinha, N.; Roy, A.K. Small signal stability analysis of dish-Stirling solar thermal based autonomous hybrid energy system. Int. J. Electr. Power Energy Syst. 2014, 63, 485–498. [Google Scholar] [CrossRef]
- Ghanamijaber, M. A hybrid fuzzy-PID controller based on gray wolf optimization algorithm in power system. Evol. Syst. 2019, 10, 273–284. [Google Scholar] [CrossRef]
- Tungadio, D.H.; Bansal, R.C.; Siti, M.W. Optimal control of active power of two micro-grids interconnected with two AC tie-lines. Electr. Power Compon. Syst. 2017, 45, 2188–2199. [Google Scholar] [CrossRef]
- Lal, D.K.; Barisal, A.K.; Tripathy, M. Load Frequency Control of Multi Area Interconnected Microgrid Power System using Grasshopper Optimization Algorithm Optimized Fuzzy PID Controller. In Proceedings of the Recent Advances on Engineering, Technology and Computational Sciences (RAETCS), Allahabad, India, 6–8 February 2018; pp. 1–6. [Google Scholar]
- Das, D.C.; Sinha, N.; Roy, A.K. Automatic Generation Control of an Organic Rankine Cycle Solar-Thermal/Wind-Diesel Hybrid Energy System. Energy Technol. 2014, 2, 721–731. [Google Scholar] [CrossRef]
- Dash, P.; Saikia, L.C.; Sinha, N. Comparison of performances of several FACTS devices using Cuckoo search algorithm optimized 2DOF controllers in multi-area AGC. Int. J. Electr. Power Energy Syst. 2015, 65, 316–324. [Google Scholar] [CrossRef]
- Yang, X.S. Flower pollination algorithm for global optimization. In International Conference on Unconventional Computing and Natural Computation; Springer: Berlin/Heidelberg, Germany, 2012; pp. 240–249. [Google Scholar]
- Yang, X.S.; Karamanoglu, M.; He, X. Multi-objective flower algorithm for optimization. Procedia Comput. Sci. 2013, 18, 861–868. [Google Scholar] [CrossRef] [Green Version]
- Peesapati, R.; Yadav, V.K.; Kumar, N. Flower pollination algorithm based multi-objective congestion management considering optimal capacities of distributed generations. Energy 2018, 147, 980–994. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SI. No. | Generating Units | Capacity | Gains | Time Constant (sec) |
|---|---|---|---|---|
| 1 | Wind turbine unit | 200 kW | = 1.0 | = 1.5 |
| 2 | Solar thermal unit | 50 kW | = 1.8, = 1 | = 1.8, = 0.3 |
| 3 | Diesel engine generator | 150 kW | = 1/300 | = 2 |
| 4 | Super magnetic storage unit | 200 kW | = −3/100 | = 0.1 |
| 5 | Battery storage unit | 150 kWh | = −1/300 | = 0.1 |
| 6 | Ultracapacitor | 200 kWh | = −0.7 | = 0.9 |
| 7 | Speed governor | - | = 1 | = 1 |
| 8 | Load | 230 kW | ||
| 9 | Damping factor, D = 0.2; inertia Coefficient, M = 0.012, regulation/droop constant = 1/5 | |||
| Variables | Minimum | Maximum |
|---|---|---|
| 0 | 15,000 | |
| 0 | 15,000 | |
| 0 | 1500 | |
| b | 0 | 1 |
| c | 0 | 1 |
| N | 0 | 100 |
| 0 | 18 | |
| 0 | 18 | |
| 0 | 1 |
| Maximum Generations | Population Size, n | Switch Probability, Ps | Levy Flight, |
|---|---|---|---|
| 100 | 50 | 0.80 | 1.5 |
| Sl. No. | Case Studies | Hybrid System Components | Operating Situations |
|---|---|---|---|
| 1 | Case 1 | WTG, STPG, DEG, BESS | PWTG = 0.4 p.u up to 80 s = 0.6 p.u at 80 s onwards |
| PSTPG = 0.1 p.u up to 40 s = 0.2 p.u at 40 s onwards | |||
| PLoad = 0.6 p.u at 0 s onwards | |||
| 2 | Case 2 | WTG, STPG, DEG, BESS, UC | PWTG = 0.4 p.u up to 80 s = 0.6 p.u at 80 s onwards |
| PSTPG = 0.1 p.u up to 40 s = 0.2 p.u at 40 s onwards | |||
| PLoad = 0.6 p.u at 0 s onwards | |||
| 3 | Case 3 | WTG, STPG, DEG, BESS, SMES | PWTG = 0.4 p.u up to 80 s = 0.6 p.u at 80 s onwards |
| PSTPG = 0.1 p.u up to 40 s = 0.2 p.u at 40 s onwards | |||
| PLoad = 0.6 p.u at 0 s onwards |
| Variable | Case 1 | Case 2 | Case 3 |
|---|---|---|---|
| 8002.31 | 6999.01 | 9000.12 | |
| 7001.43 | 5000 | 6998.44 | |
| 2 | 1.98 | 2 | |
| 0.99 | 1 | 1 | |
| - | 0.01 | 0.06 |
| Variable | Case 1 | Case 2 | Case 3 |
|---|---|---|---|
| 2160.83 | 1400.59 | 1460.36 | |
| 1800 | 1000 | 1300 | |
| 1100.78 | 998.78 | 150.78 | |
| 15 | 10 | 13 | |
| 6.38 | 4.5 | 4.48 | |
| - | 0.1 | 0.68 |
| Variable | Case 1 | Case 2 | Case 3 |
|---|---|---|---|
| 9745 | 10,001 | 9689 | |
| 10,540 | 8984 | 9012 | |
| b | 0.979 | 0.962 | 0.958 |
| 7.5 | 7.42 | 10.50 | |
| 9.81 | 9.9 | 11.02 | |
| - | 0.05 | 0.8 |
| Variable | Case 1 | Case 2 | Case 3 |
|---|---|---|---|
| 12,458.46 | 11,997.12 | 12,668.69 | |
| 12,238.84 | 12,189.46 | 11,997.37 | |
| 1 | 0.99 | 1 | |
| N | 75.865 | 76 | 81 |
| b | 0.951 | 0.949 | 0.960 |
| c | 0.9192 | 0.9089 | 0.8998 |
| 8 | 7.89 | 12 | |
| 11 | 10 | 14 | |
| 0.01 | 0.04 | 0.0331 |
| Variable | Case 1 (BESS) | Case 2 (BESS + UC) | Case 3 (BESS + SMES) | |||
|---|---|---|---|---|---|---|
| Time (s) | t = 40 s | t = 80 s | t = 40 s | t = 80 s | t = 40 s | t = 80 s |
| Overshoot | Overshoot | Overshoot | Overshoot | Overshoot | Overshoot | |
| PI | 0.001762 | 0.002394 | 0.0009171 | 0.001261 | 0.0005068 | 0.0006786 |
| PID | 0.001159 | 0.001593 | 0.0006243 | 0.0008791 | 0.0003091 | 0.0004147 |
| 2DOF PI | 0.0007034 | 0.0009497 | 0.0004831 | 0.0006707 | 0.0002328 | 0.0003128 |
| 2DOF PID | 0.0005593 | 0.0007652 | 0.0003517 | 0.000498 | 0.0001132 | 0.0001574 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hussain, I.; Das, D.C.; Sinha, N.; Latif, A.; Hussain, S.M.S.; Ustun, T.S. Performance Assessment of an Islanded Hybrid Power System with Different Storage Combinations Using an FPA-Tuned Two-Degree-of-Freedom (2DOF) Controller. Energies 2020, 13, 5610. https://doi.org/10.3390/en13215610
Hussain I, Das DC, Sinha N, Latif A, Hussain SMS, Ustun TS. Performance Assessment of an Islanded Hybrid Power System with Different Storage Combinations Using an FPA-Tuned Two-Degree-of-Freedom (2DOF) Controller. Energies. 2020; 13(21):5610. https://doi.org/10.3390/en13215610
Chicago/Turabian StyleHussain, Israfil, Dulal Chandra Das, Nidul Sinha, Abdul Latif, S. M. Suhail Hussain, and Taha Selim Ustun. 2020. "Performance Assessment of an Islanded Hybrid Power System with Different Storage Combinations Using an FPA-Tuned Two-Degree-of-Freedom (2DOF) Controller" Energies 13, no. 21: 5610. https://doi.org/10.3390/en13215610