Model Based Optimisation Algorithm for Maximum Power Point Tracking in Photovoltaic Panels †




 ,
, 
Abstract
:1. Introduction
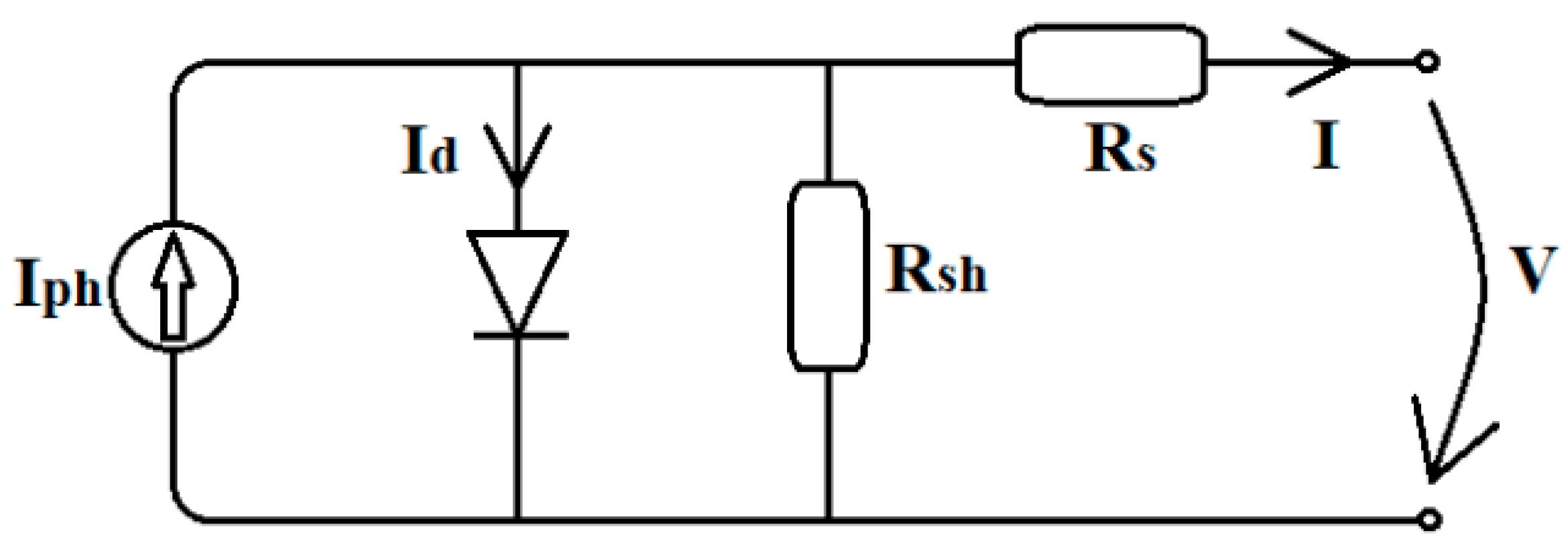
2. Mathematical Model of the Photovoltaic Panel
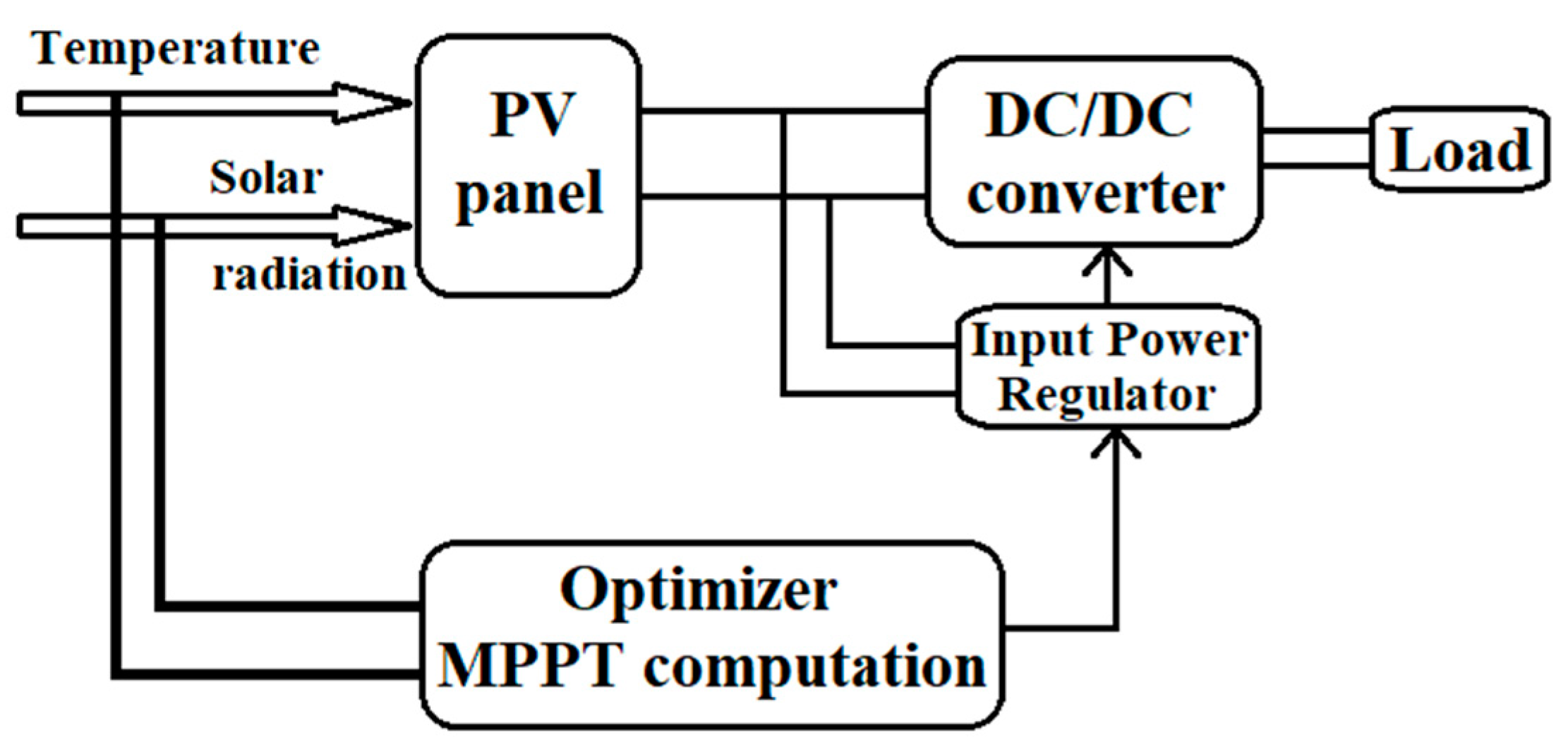
3. Maximum Power Point Tracking Method
3.1. Defining the Optimisation Problem
3.2. Lagrangian Dual Problem
3.3. Optimisation Solution
| Algorithm 1. Out forward Optimisation for Minimisation. |
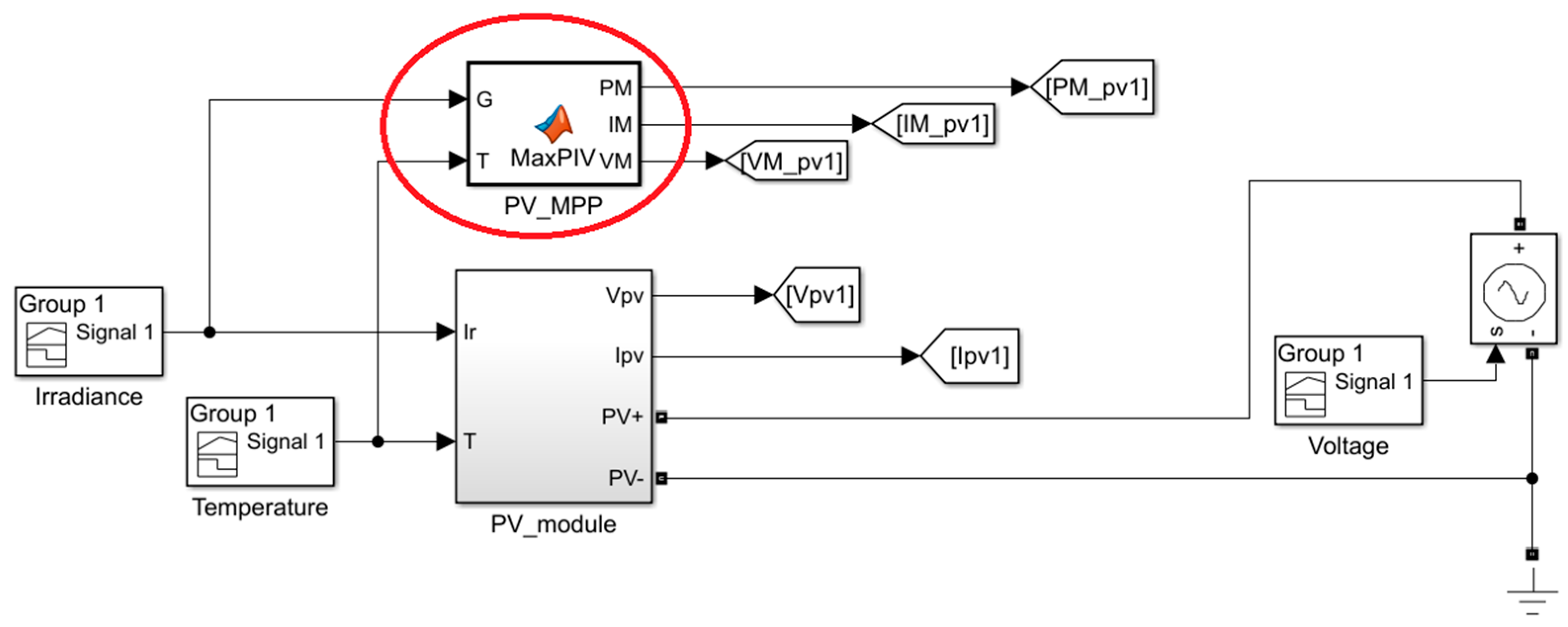
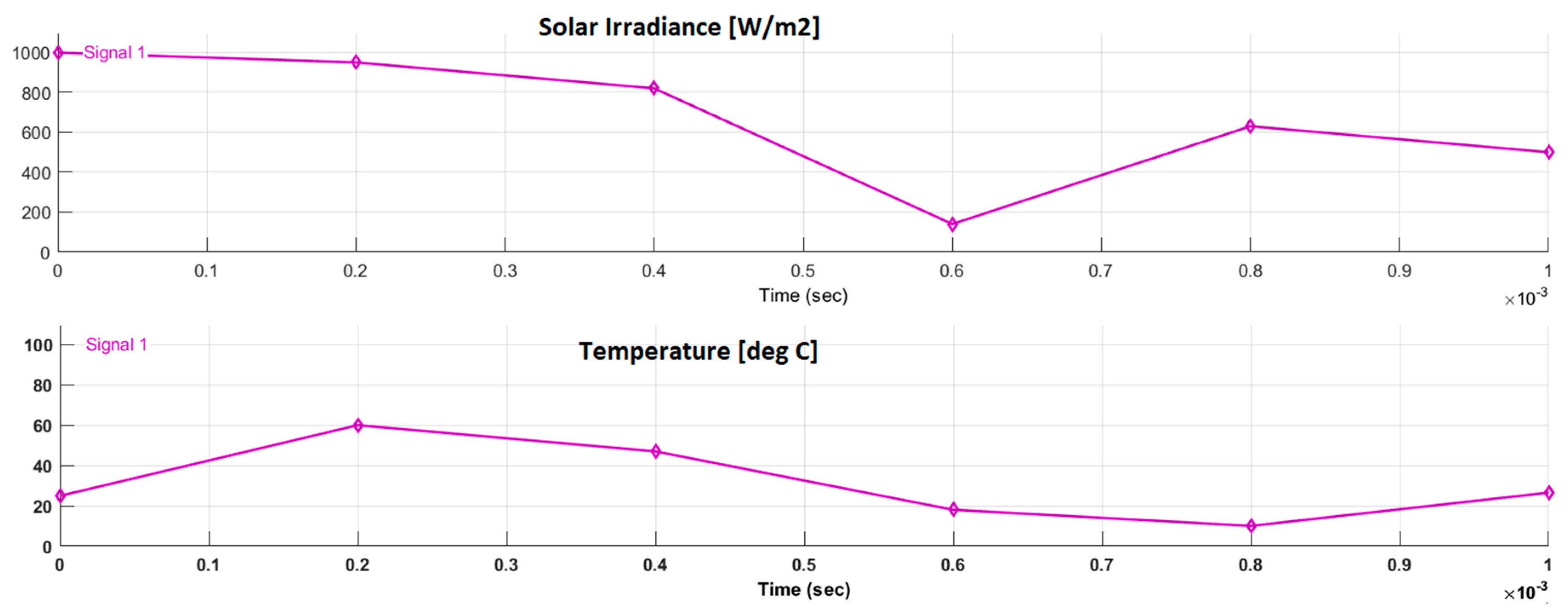
4. Validation in Simulation
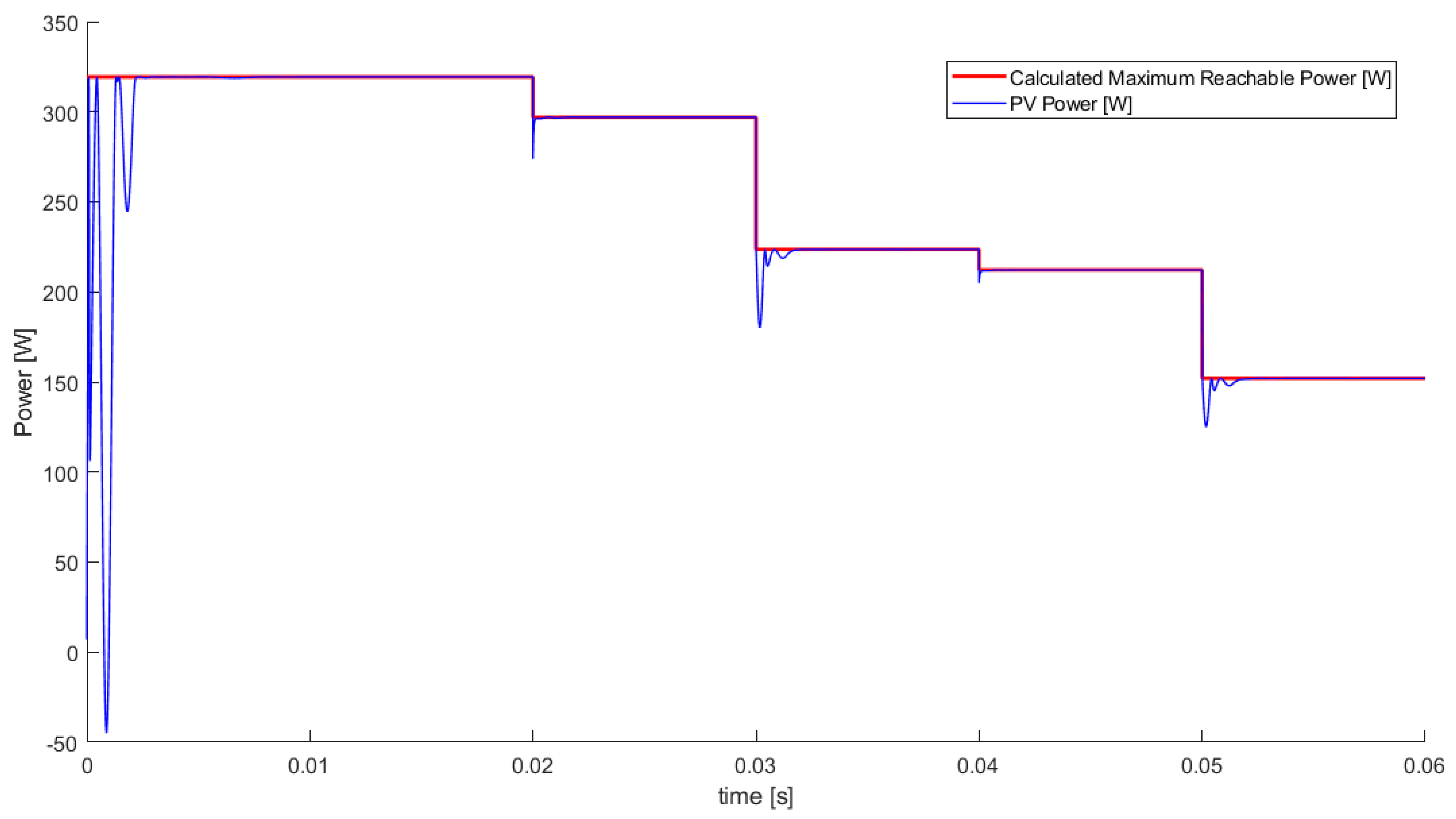
4.1. Validation of the Optimiser Block without Control
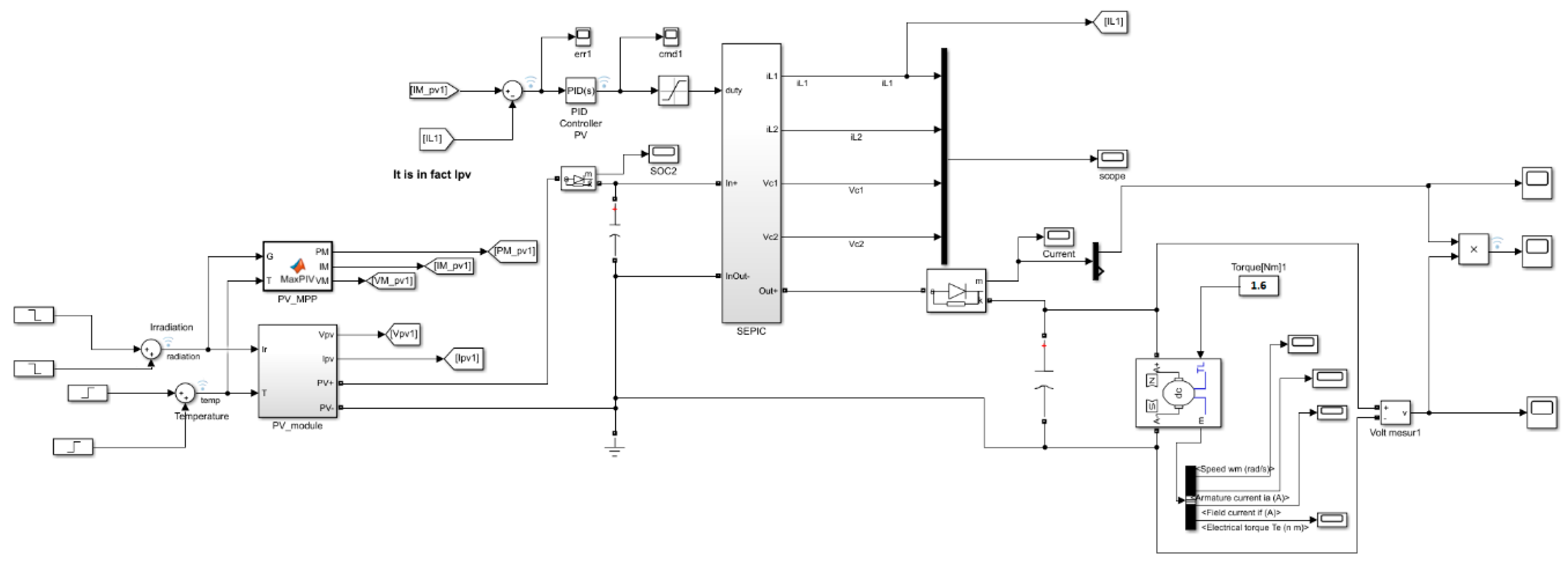
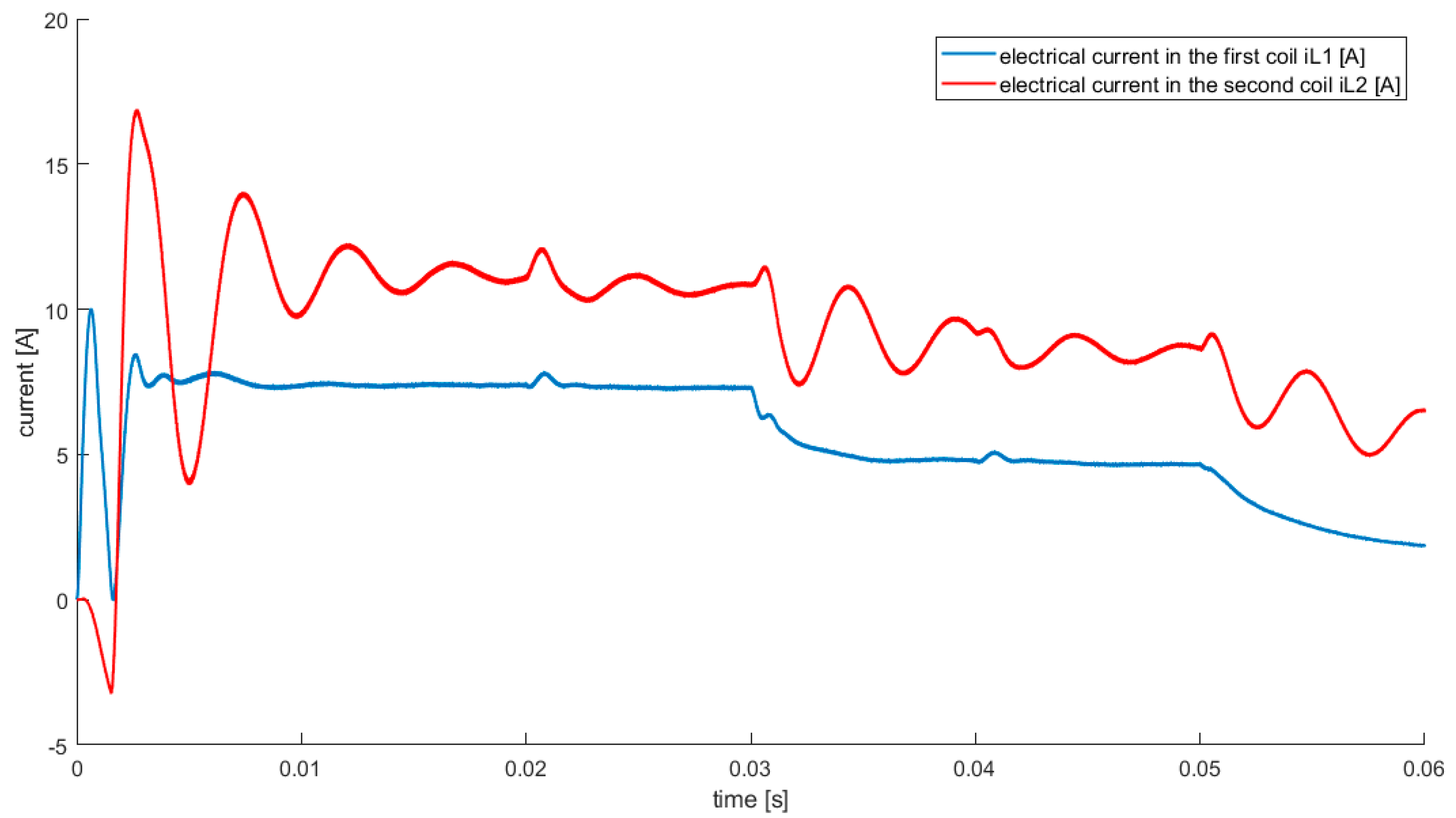
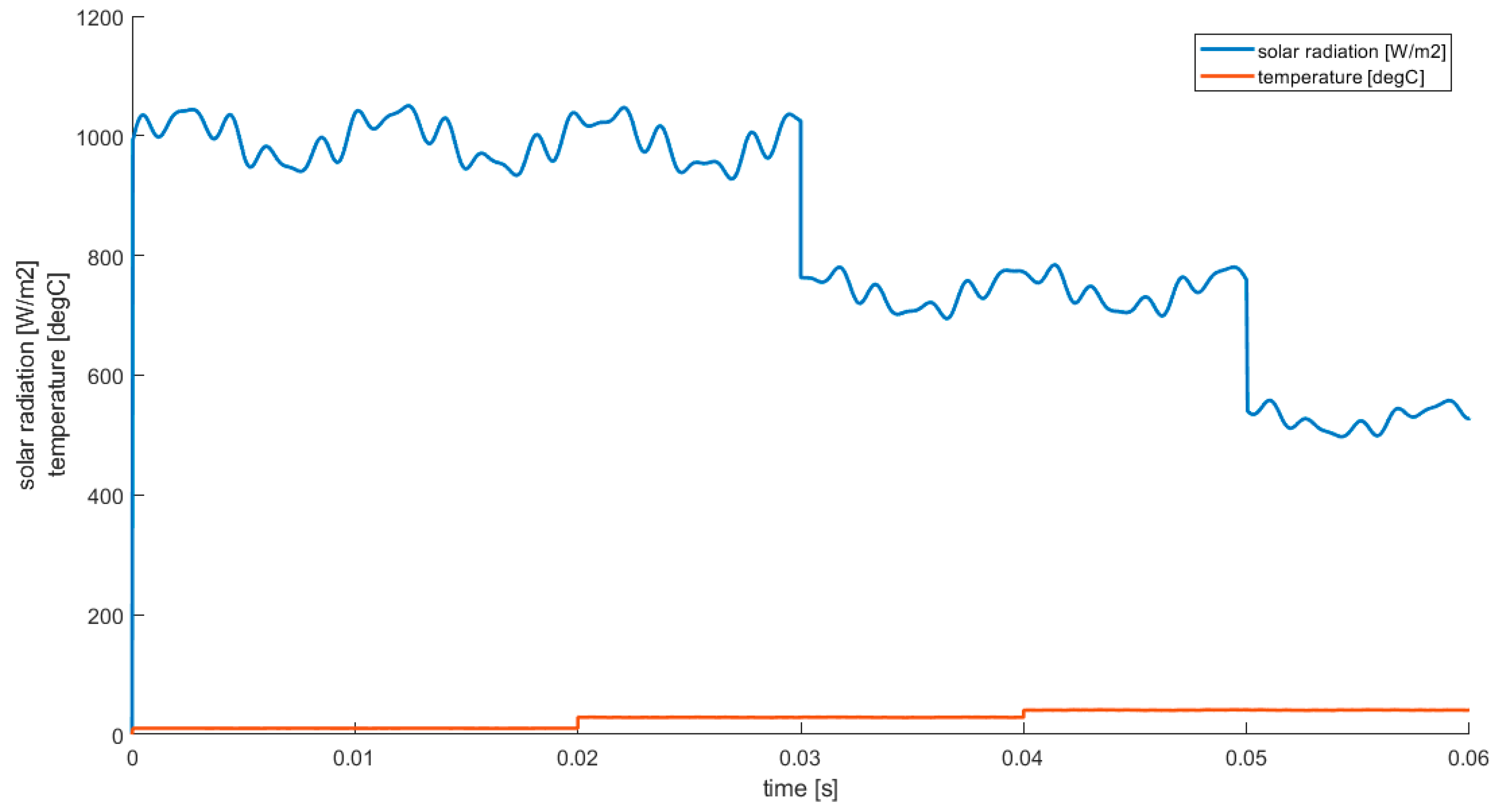
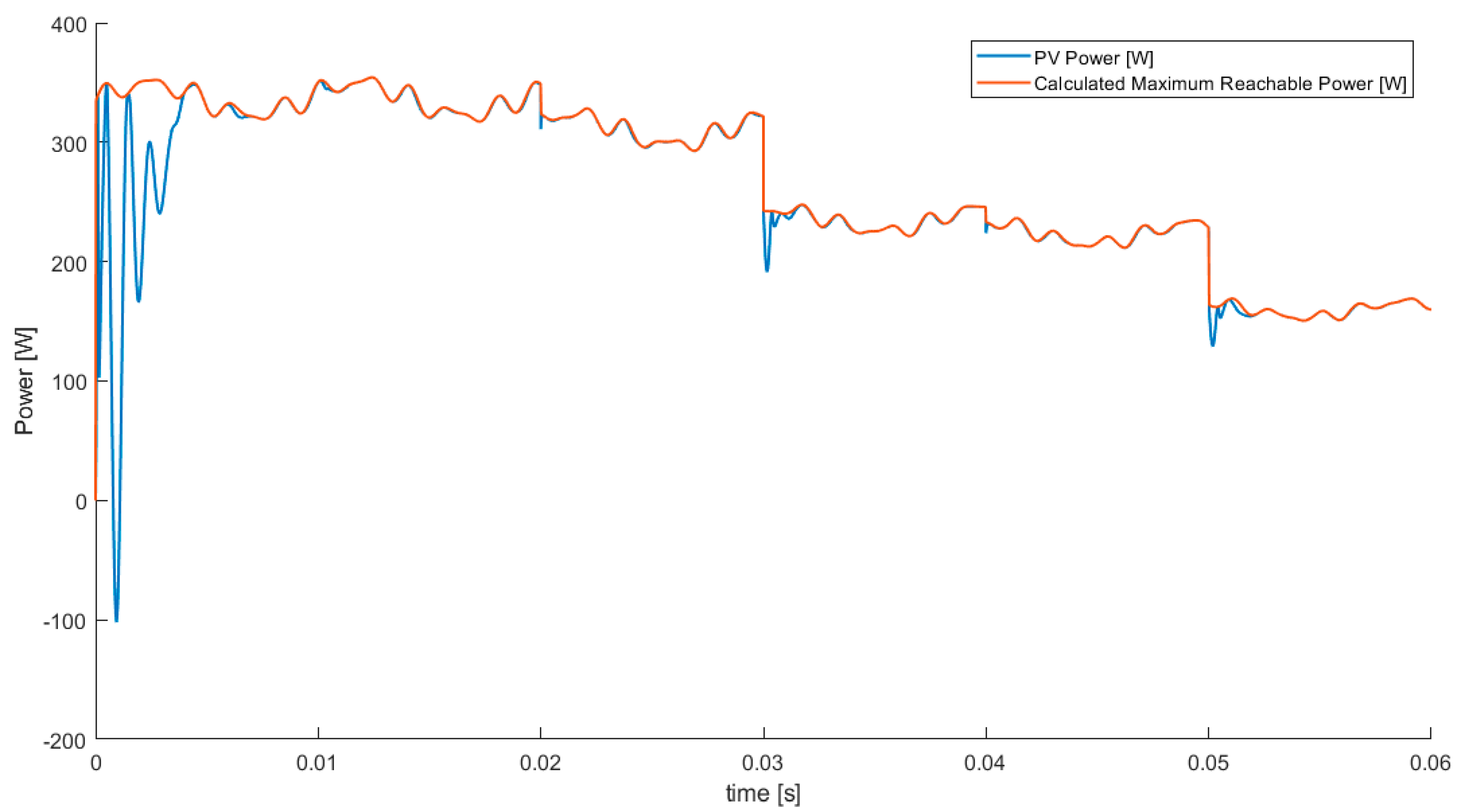
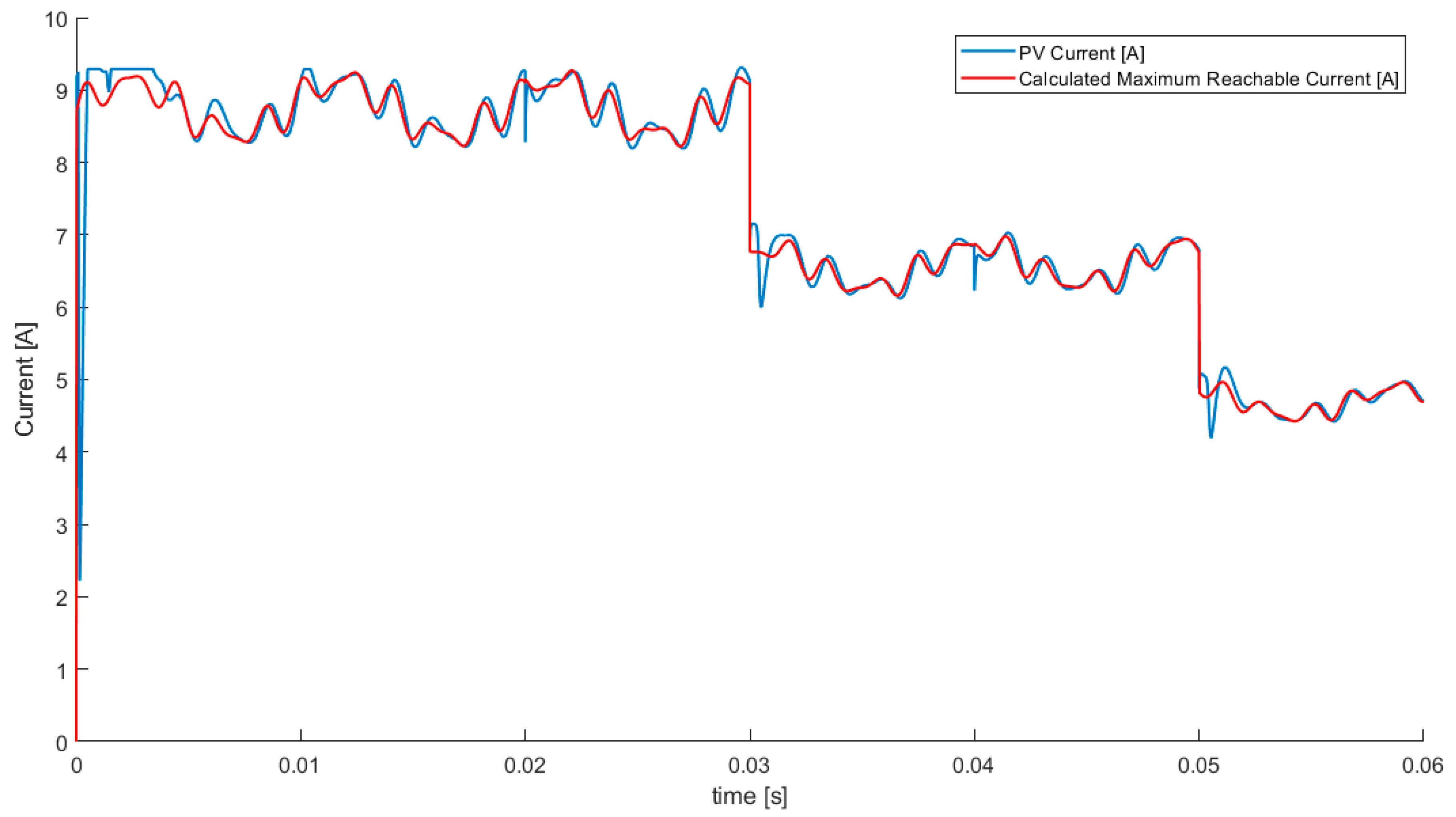
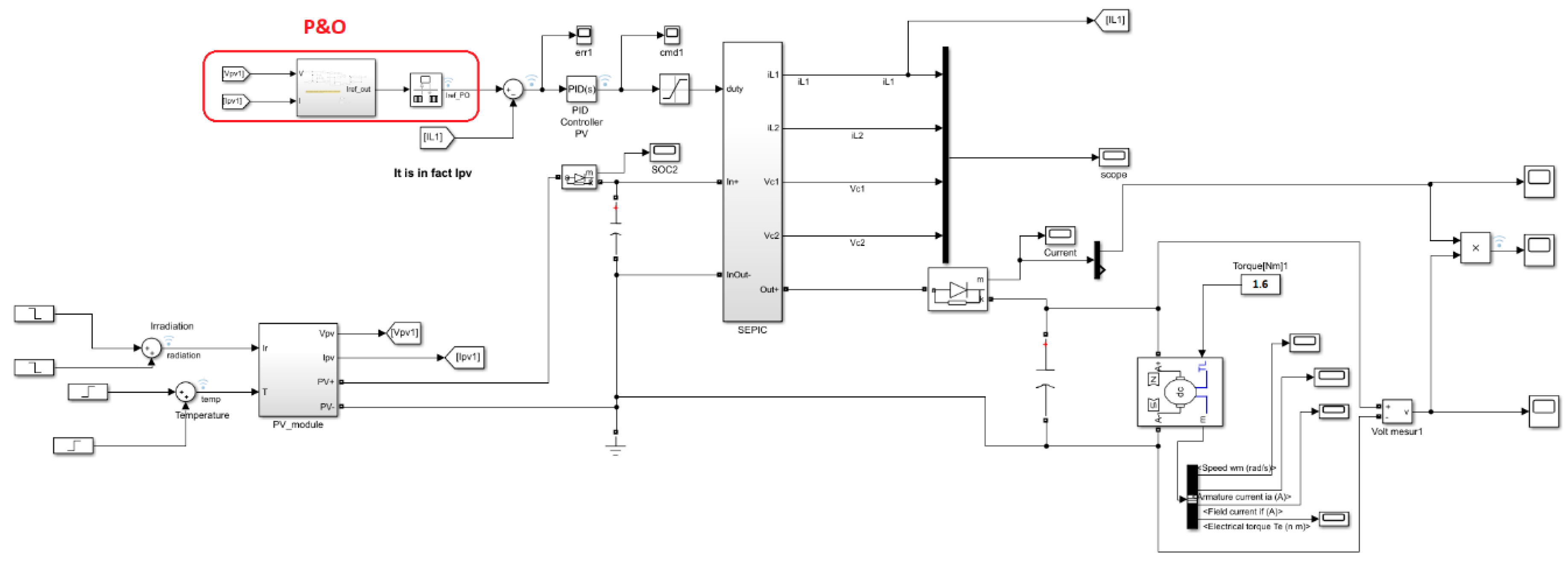
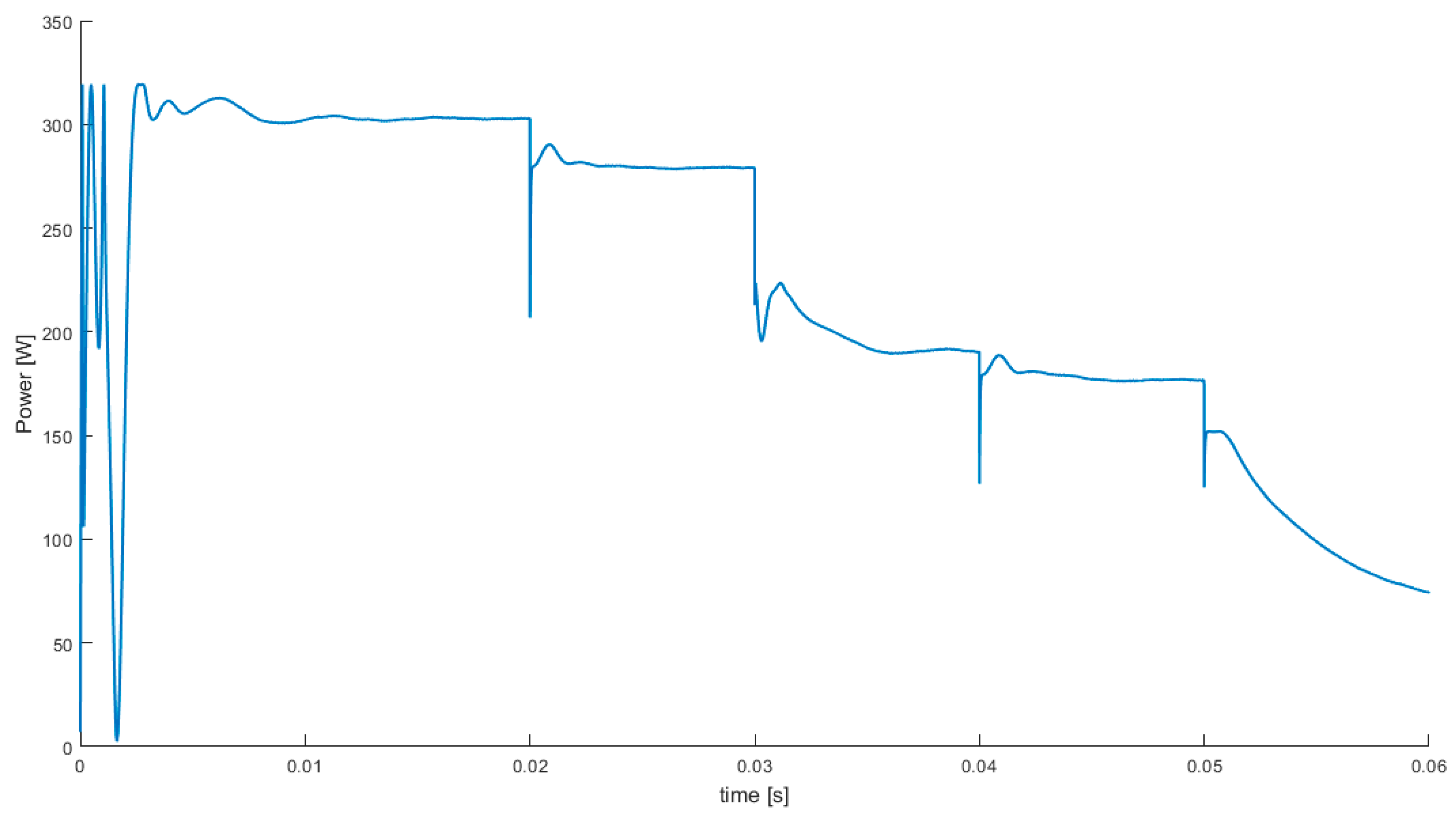
4.2. Validation of the Optimiser Block in an MPPT Control Architecture
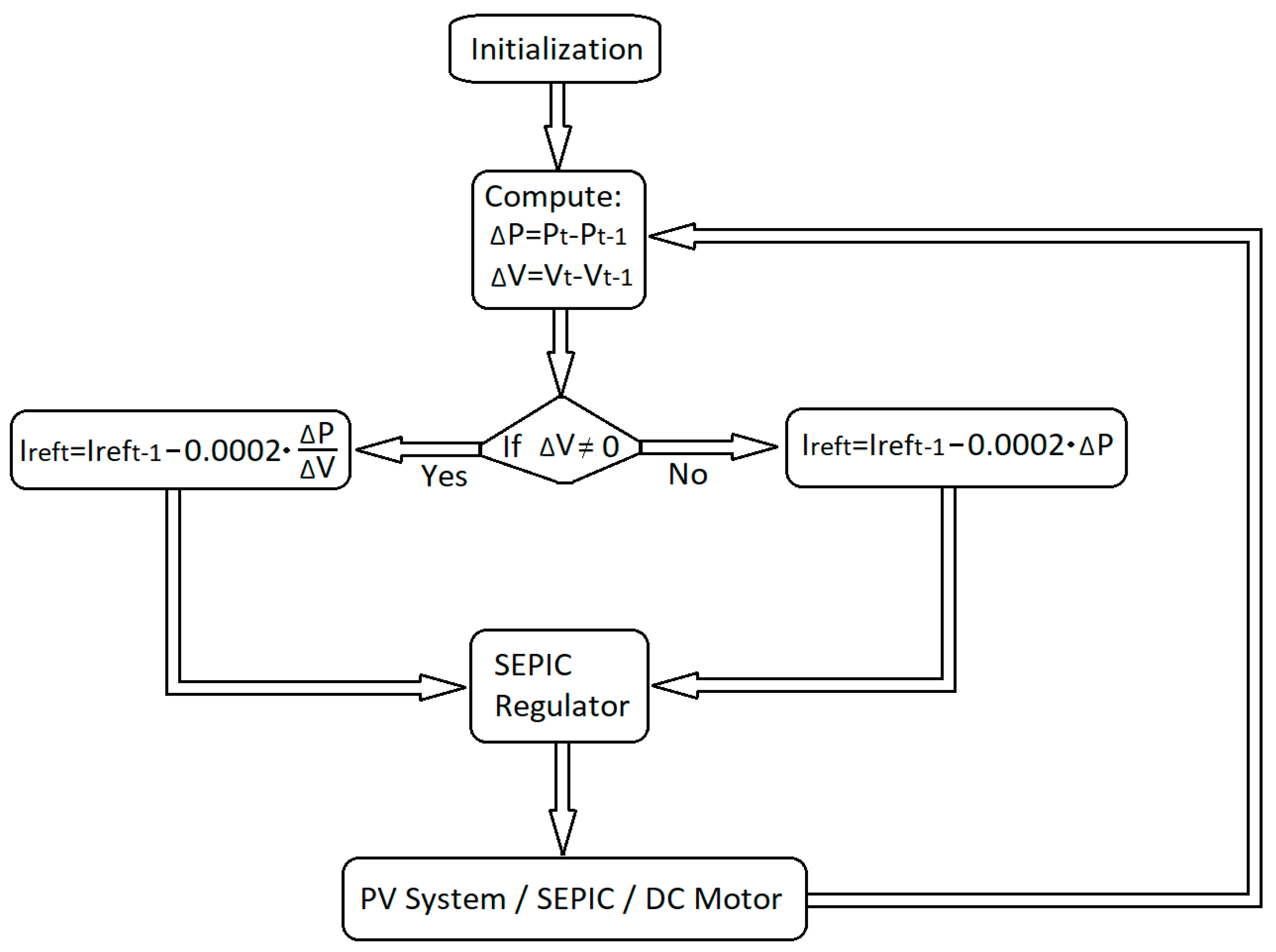
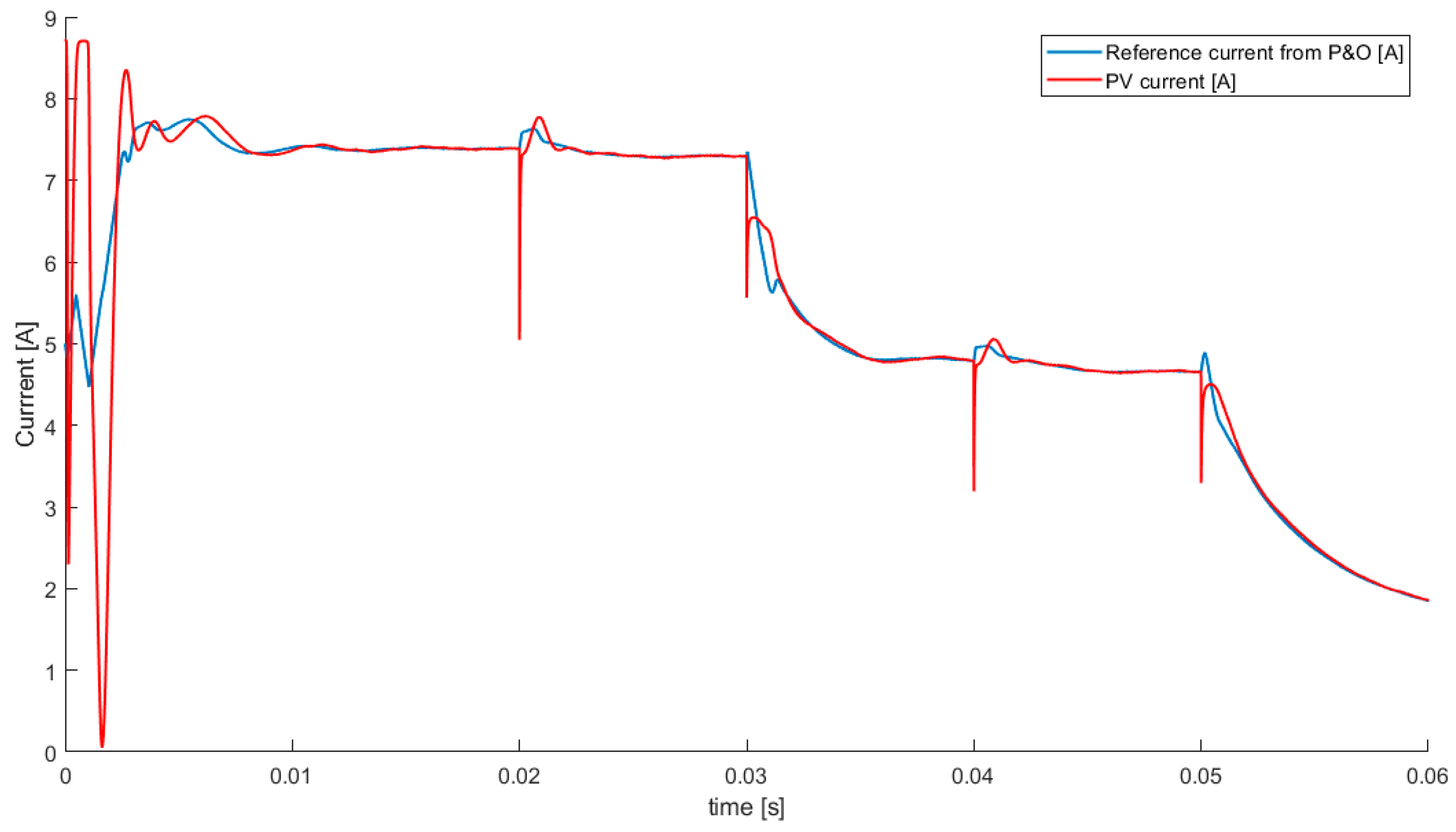
4.3. Comparative Study between the Proposed Architecture and a Classical P&O Approach
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| MPPT | Maximum Power Point Tracking |
| MPP | Maximum Power Point |
| PV | Photovoltaic |
| NAG | Nesterov Accelerated Gradient |
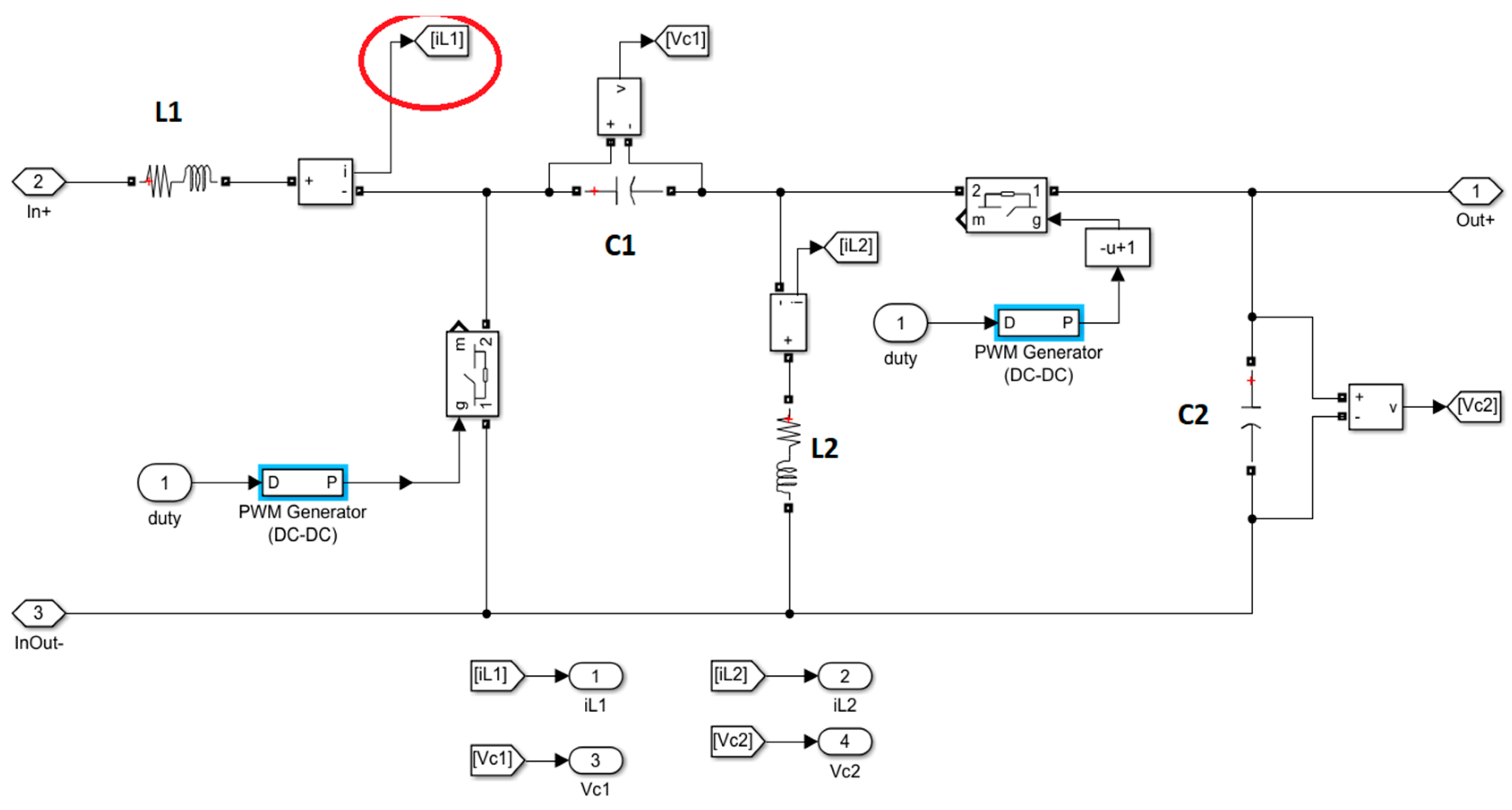
| SEPIC | Single Ended Primary Inductor Converter |
| IncCond | Incremental conductance method |
| P&O | Perturb and Observe |
| COP | constrained optimisation problem |
Appendix A
References
- Khaehintung, N.; Sirisuk, P.; Kunakorn, A. Grid-connected photovoltaic system with maximum power point tracking using self-organizing fuzzy logic controller. In Proceedings of the Tencon 2005 IEEE Region 10 Conference, Melbourne, VIC, Australia, 21–24 November 2005. [Google Scholar]
- Salas, V.; Olias, E.; Barrado, A.; Lazaro, A. Review of the maximum power point tracking algorithms for stand-slone photovoltaic systems. Sol. Energy Mater. Sol. Cells 2006, 90, 1555–1578. [Google Scholar] [CrossRef]
- Mrabti, T.; El Ouariachi, M.; Yaden, M.; Kassmi, K.; Kassmi, K. Characterization and modeling of electrical performance of the photovoltaic panels and system. J. Electr. Eng. Theory Appl. 2010, 1, 100–110. [Google Scholar]
- Jerbi, H. Design and performance analysis of a PV solar powered water pumping system. Int. J. Adv. Appl. Sci. 2017, 4, 127–132. [Google Scholar] [CrossRef] [Green Version]
- El Ouariachi, M.L.; Mrabti, T.; Tidahf, B.; Kassmi, K.; Kassmi, K. Regulation of the electric power provided by the panels of the photovoltaic system. Int. J. Phys. Sci. 2009, 4, 294–309. [Google Scholar]
- Esram, T.; Chapman, P.L. Comparison of Photovoltaic Array Maximum Power Point Tracking Techniques. IEEE Trans. Energy Convers. 2007, 22, 439–449. [Google Scholar] [CrossRef] [Green Version]
- Shraif, M.F. Optimisation et Mesure de Chaîne de Conversion D’énergie Photovoltaïque en Energie Electrique. Ph.D. Thesis, Université Paul Sabatier, Toulouse, France, 2002. [Google Scholar]
- Hussein, K. Maximum photovoltaic power tracking: An algorithm for rapidly changing atmospheric conditions. IEEE Proc. Gener. Transm. Distrib. 1995, 142, 59–64. [Google Scholar] [CrossRef]
- Cocconi, A.; Rippel, W. Lectures from GM Sun Racer Case History, Lecture 3-1: The Sun Racer Power Systems’; Number M-101; Society of Automotive Engineers: Warrendale, PA, USA, 1990. [Google Scholar]
- Veerachary, M.; Senjyu, T.; Uezato, K. Neural-network-based maximum-power-point tracking of coupled-inductor interleaved-boost-converter-supplied pv system using fuzzy controller. IEEE Trans. Ind. Electron. 2003, 50, 749–758. [Google Scholar] [CrossRef] [Green Version]
- Bahgat, A.B.G.; Helwa, N.H.; Ahmad, G.E.; El Shenawy, E.T. Maximum power point tracking controller for PV systems using neural networks. Renew. Energy 2005, 30, 1257–1268. [Google Scholar] [CrossRef]
- Swrup, T.; Ansari, A. Maximum power point tracking method for multiple photovoltaic systems. Res. J. Chem. Sci. 2012, 2, 69–77. [Google Scholar]
- Masoum, M.A.S.; Dehbonei, H.; Fuchs, E.F. Theoretical and experimental analysis of photovoltaic systems with voltage and current-based maximum power-point tracking. IEEE Trans. Energy Conver. 2002, 17, 514–522. [Google Scholar] [CrossRef] [Green Version]
- Mellit, A.; Kalogirou, S. Artificial intelligence techniques for photovoltaic applications: A review. Prog. Energy Combust. Sci. 2008, 34, 574–632. [Google Scholar] [CrossRef]
- Lalouni, S.; Rekioua, D.; Rekioua, T.; Matagne, E. Fuzzy logic control of stand-alone photovoltaic system with battery storage. J. Power Sources 2009, 193, 899–907. [Google Scholar] [CrossRef]
- Salas, V.; Olías, E.; Barrado, A.; Lázaro, A. New algorithm applied to maximum power point tracking without batteries. In Proceedings of the 21st European Photovoltaic Solar Energy Conference, Dresden, Germany, 4–8 September 2006. [Google Scholar]
- Rodriguez, C.; Amaratunga, G.A.J. Analytic Solution to the Photovoltaic Maximum Power Point Problem. IEEE Trans. Circuits Syst. I Regul. Pap. 2007, 54, 2054–2060. [Google Scholar] [CrossRef]
- Chung, H.S.-H.; Tse, K.; Hui, S.; Mok, C.; Ho, M. A novel maximum power point tracking technique for solar panels using a SEPIC or cuk converter. IEEE Trans. Power Electron. 2003, 18, 717–724. [Google Scholar] [CrossRef]
- Femia, N.; Petrone, G.; Spagnuolo, G.; Vitelli, M. Optimization of Perturb and Observe Maximum Power Point Tracking Method. IEEE Trans. Power Electron. 2005, 20, 963–973. [Google Scholar] [CrossRef]
- Tung, Y.M.; Hu, A.P.; Nair, N.K. Evaluation of Micro Controller Based Maximum Power Point Tracking Methods using dSPACE Platform. In Proceedings of the Australasian Universities Power Engineering Conference (AUPEC’06), Melbourne, VIC, Australia, 10–13 December 2006. [Google Scholar]
- Sera, D.; Máthé, L.; Kerekes, T.; Spataru, S.; Teodorescu, R. On the Perturb-and-Observe and Incremental Conductance MPPT Methods for PV Systems. IEEE J. Photovoltaics 2013, 3, 1070–1078. [Google Scholar] [CrossRef]
- Hadji, S.; Gaubert, J.; Krim, F. Maximum Power Point Tracking (MPPT) for photovoltaic systems using open circuit voltage and short circuit current. In Proceedings of the 3rd International Conference on Systems and Control, Algiers, Algeria, 29–31 October 2013; pp. 87–92. [Google Scholar]
- Zakzouk, N.E.; AAbdelsalam, A.K.; Helal, A.; Williams, B.W. Modified variable-step incremental conductance maximum power point tracking technique for photovoltaic systems. In Proceedings of the 39th Annual Conference of the IEEE Industrial Electronics Society (IECON), Vienna, Austria, 10–13 November 2013; pp. 1741–1748. [Google Scholar]
- Femia, N.; Granozio, D.; Petrone, G.; Spagnuolo, G.; Vitelli, M. Predictive & Adaptive MPPT Perturb and Observe Method. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 934–950. [Google Scholar]
- Femia, N.; Lisi, G.; Petrone, G.; Spagnuolo, G.; Vitelli, M. Distributed maximum power point tracking of photovoltaic arrays: Novel approach and system analysis. IEEE Trans. Ind. Electron. 2008, 55, 2610–2621. [Google Scholar] [CrossRef] [Green Version]
- Khabou, H.; Souissi, M.; Aitouche, A. MPPT implementation on boost converter by using T–S fuzzy method. Math. Comput. Simul. 2020, 167, 119–134. [Google Scholar] [CrossRef]
- Nelatury, S.R. A maximum power point algorithm using the Lagrange method. J. Power Sources 2013, 234, 119–128. [Google Scholar] [CrossRef]
- Ahmed, J.; Salam, Z.A. Maximum Power Point Tracking (MPPT) for PV system using Cuckoo Search with partial shading capability. Appl. Energy 2014, 119, 118–130. [Google Scholar] [CrossRef]
- Essefi, R.M.; Souissi, M.; Abdallah, H.H. Maximum Power Point Tracking Control using Neural Networks for Stand-Alone Photovoltaic Systems. Int. J. Mod. Nonlinear Theory Appl. 2014, 3, 53–65. [Google Scholar] [CrossRef] [Green Version]
- Pai, F.S.; Chao, R.M. A New Algorithm to Photovoltaic Power Point Tracking Problems with Quadratic Maximization. IEEE Trans. Energy Convers. 2009, 25, 262–264. [Google Scholar]
- Jendoubi, A.; Fnaiech, N.; Bacha, F. New Multivariate Polynomial Interpolation-Based MPPT applied to Battery Storage Photovoltaic System. Int. J. Control Energy Electr. Eng. CEEE. 2017, 4, 1–6. [Google Scholar]
- Zhang, J.; Wang, T.; Ran, H. A maximum power point tracking algorithm based on gradient descent method. In Proceedings of the IEEE Power & Energy Society General Meeting, Calgary, AB, Canada, 26–30 July 2009. [Google Scholar]
- Khan, M.Z.R.; Khan, M.Z.; Khan, M.N.I.; Saha, S.S.; Noor, D.F.; Rachi, M.R.K. Maximum Power Point Tracking for Photovoltaic Array using Parabolic Interpolation. Int. J. Inf. Electron. Eng. 2014, 4, 249. [Google Scholar] [CrossRef]
- Khaldi, N.; Mahmoudi, H.; Zazi, M.; Barradi, Y. The MPPT control of PV system by using neural networks based on Newton Raphson method. In Proceedings of the International Renewable and Sustainable Energy Conference (IRSEC), Ouarzazate, Morocco, 17–19 October 2014. [Google Scholar]
- Fortunato, M.; Giustiniani, A.; Petrone, G.; Spagnuolo, G.; Vitelli, M. Maximum Power Point Tracking in a One-Cycle-Controlled Single-Stage Photovoltaic Inverter. IEEE Trans. Ind. Electron. 2008, 55, 2684–2693. [Google Scholar] [CrossRef]
- Petrone, G.; Spagnuolo, G.; Vitelli, M. An Analog Technique for Distributed MPPT PV Applications. IEEE Trans. Ind. Electron. 2011, 59, 4713–4722. [Google Scholar] [CrossRef]
- Bianconi, E.; Calvente, J.; Giral, R.; Mamarelis, E.; Petrone, G.; Ramos-Paja, C.A.; Spagnuolo, G.; Vitelli, M. A Fast Current-Based MPPT Technique Employing Sliding Mode Control. IEEE Trans. Ind. Electron. 2012, 60, 1168–1178. [Google Scholar] [CrossRef]
- Renaudineau, H.; Donatantonio, F.; Fontchastagner, J.; Petrone, G.; Spagnuolo, G.; Martin, J.-P.; Pierfederici, S. A PSO-Based Global MPPT Technique for Distributed PV Power Generation. IEEE Trans. Ind. Electron. 2014, 62, 1047–1058. [Google Scholar] [CrossRef]
- Stefanoiu, D.; Borne, P.; Popescu, D.; Filip, F.G.; El Kamel, A. Optimization in Engineering Sciences-Metaheuristics, Stochastics Methods and Decision Support; John Wiley: London, UK, 2014; ISBN 978-1-84821-498-9. [Google Scholar]
- Popescu, D.; Gharbi, A.; Stefanoiu, D.; Borne, P. Process Control Design for Industrial Applications; John Wiley: London, UK, 2017; ISBN 978-1-78630-014-0. [Google Scholar]
- Farhat, M.; Barambones, O.; Sbita, L. An online optimum voltage estimation and real-time MPP tracking for a PV system. Int. J. Adapt. Control. Signal Process. 2017, 31, 1655–1665. [Google Scholar] [CrossRef]
- Takruri, M.; Farhat, M.; Barambones, O.; Ramos-Hernanz, J.A.; Turkieh, M.J.; Badawi, M.; Alzoubi, H.; Sakur, M.A. Maximum Power Point Tracking of PV System Based on Machine Learning. Energies 2020, 13, 692. [Google Scholar] [CrossRef] [Green Version]
- Chou, K.Y.; Yang, S.T.; Chen, Y.P. Maximum Power Point Tracking of Photovoltaic System Based on Reinforcement Learning. Sensors 2019, 19, 5054. [Google Scholar] [CrossRef] [Green Version]
- Rao, S.S. Engineering Optimization Theory and Practice, 4th ed.; John Wiley & Sons: Hoboken, NJ, USA, 2009. [Google Scholar]
- Ahmadi, D.; Mansouri, S.A.; Wang, J. Circuit topology study for distributed MPPT in very large scale PV power plants. In Proceedings of the Twenty-Sixth Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Fort Worth, TX, USA, 6–11 March 2011; pp. 786–791. [Google Scholar]
- Filip, F.; Popescu, D.; Mateescu, M. Optimal decisions for complex systems—Software packages. Math. Comput. Simul. 2008, 76, 422–429. [Google Scholar] [CrossRef]
- Borne, P.; Popescu, D.; Filip, F.G.; Stefanoiu, D. Optimization in Engineering Sciences—Exact Methods; John Wiley: London, UK, 2013; ISBN 978-1-84821-432. [Google Scholar]
- Wibisono, A.; Wilson, A.C.; Jordan, M.I. A variational perspective on accelerated methods in optimization. Proc. Natl. Acad. Sci. USA 2016, 113, E7351–E7358. [Google Scholar] [CrossRef] [Green Version]
- Zeiler, M.D. Adadelta: An Adaptive Learning Rate Method. arXiv 2012, arXiv:1212.5701. [Google Scholar]
- Hamidi, F.; Olteanu, S.C.; Gliga, L. Gradient Optimization Methods for Maximum Power Point Tracking in Photovoltaic Panels. In Proceedings of the ACD-IFAC Conference, Bologna, Italy, 21–22 November 2019. [Google Scholar]
- Cotfas, P.A.; Cotfas, D.T.; Borza, P.N.; Sera, D.; Teodorescu, R. Solar Cell Capacitance Determination Based on an RLC Resonant Circuit. Energies 2018, 11, 672. [Google Scholar] [CrossRef] [Green Version]
- Faranda, R.; Leva, S. Energy comparison of MPPT techniques for PV Systems. WSEAS Trans. Power Syst. 2008, 3, 446–455. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Current of a Photovoltaic Panel [A] | Voltage of a Photovoltaic Panel [V] | ||||
|---|---|---|---|---|---|
| Cell photovoltaic current [A] | Diode saturation current | Cell solar irradiation at standard test conditions [] | |||
| Series resistance (0.45885 Ω) | Shunt resistance (1096.4554 Ω) | Temperature coefficient for short circuit current | |||
| q | Electron charge constant C | Diode ideality factor (0.99583) | Temperature at standard test conditions [298.15 Kelvin] | ||
| Number of series cells in a photovoltaic panel (72) | Boltzmann constant | Cell temperature [Kelvin] | |||
| Short-circuit current at standard test conditions (9.39 A) | Temperature coefficient for the open circuit voltage | Open circuit voltage at standard test conditions (45.48 V) |
| PWM Frequency | 60,000 [Hz] | 1.8 [mH] | 1.4 [mH] | ||
|---|---|---|---|---|---|
| 120 [μF] | 470 [μF] |

© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hamidi, F.; Olteanu, S.C.; Popescu, D.; Jerbi, H.; Dincă, I.; Ben Aoun, S.; Abbassi, R. Model Based Optimisation Algorithm for Maximum Power Point Tracking in Photovoltaic Panels. Energies 2020, 13, 4798. https://doi.org/10.3390/en13184798
Hamidi F, Olteanu SC, Popescu D, Jerbi H, Dincă I, Ben Aoun S, Abbassi R. Model Based Optimisation Algorithm for Maximum Power Point Tracking in Photovoltaic Panels. Energies. 2020; 13(18):4798. https://doi.org/10.3390/en13184798
Chicago/Turabian StyleHamidi, Faiçal, Severus Constantin Olteanu, Dumitru Popescu, Houssem Jerbi, Ingrid Dincă, Sondess Ben Aoun, and Rabeh Abbassi. 2020. "Model Based Optimisation Algorithm for Maximum Power Point Tracking in Photovoltaic Panels" Energies 13, no. 18: 4798. https://doi.org/10.3390/en13184798