3.1. Simulation Scenarios Description
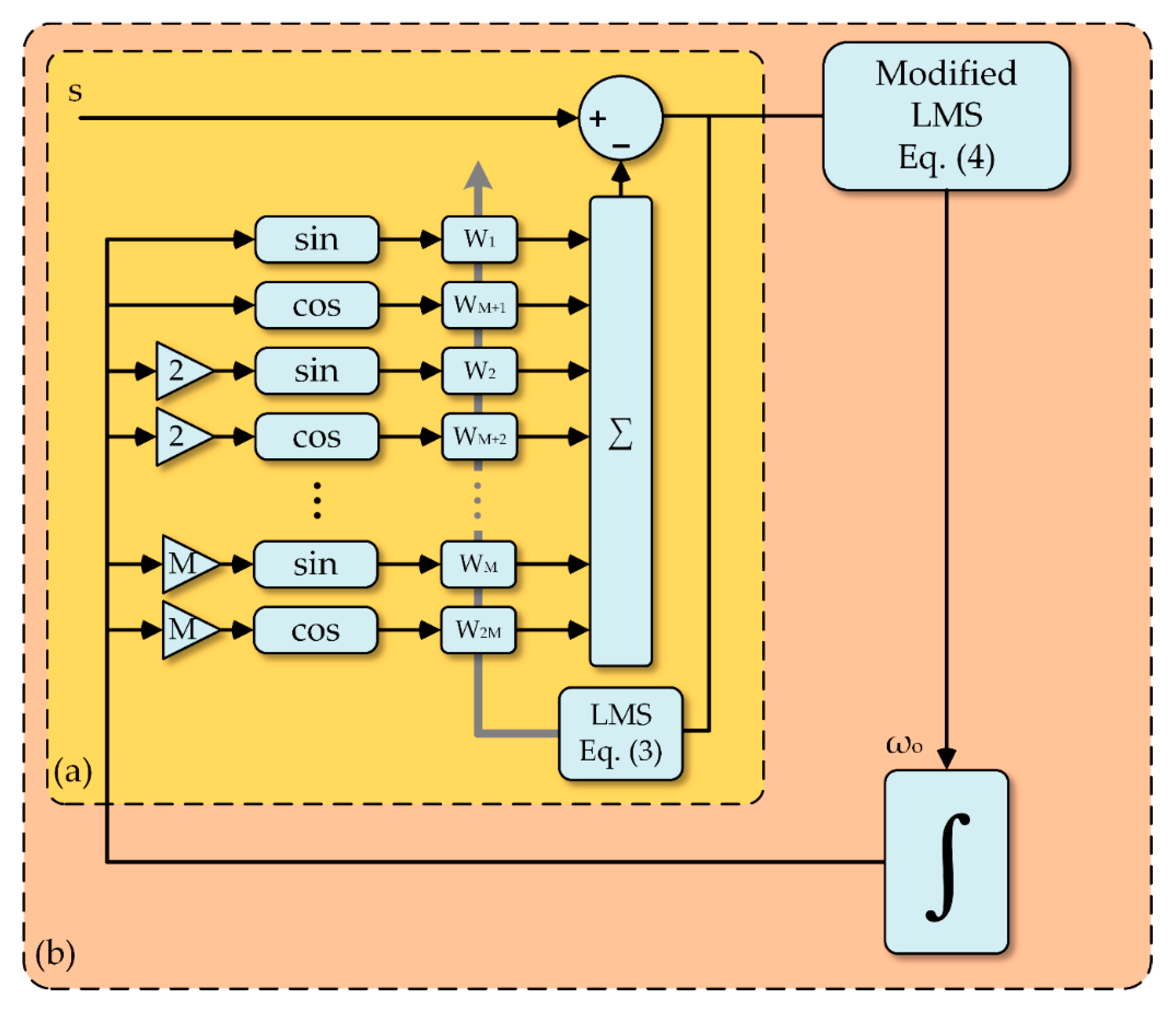
The design process for the 3WFLC and SDFLC involves the choosing of the adaptive weights for the LMS and modified LMS algorithms. Such weights are determined empirically, defining only the maximum stability limits and the best response time to a sinusoidal signal with 1 pu, 60 Hz, and 0° parameters. The maximum limits for adaptive weights are related to the highest harmonic to be tracked. For the tuning, the 23rd harmonic was adopted as the largest tracked harmonic component, thus the highest value of adaptive weights that guarantees the stability of the algorithm is 0.0434. Since the 3WFLC will only track the fundamental component, its maximum limit for adaptive weight is 1. The SDFLC and 3WFLC were simulated in the PSCAD/EMTDC to tune all adaptive weights. The configuration parameters of the PSCAD simulation are presented in
Table 1, and the values found for each of the algorithms are shown in
Table 2.
Some simulation scenarios are also proposed to verify the algorithm efficiency in tracking harmonic and symmetric components. Due to its relevance in literature, multiple second-order generalized integrators and frequency-locked loop(MSOGI-FLL) is also subjected to the same scenarios and the results of both algorithms are compared [
8,
9]. The MSOGI-FLL proposed in this paper is designed to track zero sequence components, which, although not usual for this strategy, is suitable for the proper harmonic tracking in proposed scenarios. In scenarios where there are frequency transients, the comparison is also performed with the FLC proposed in the literature using the same adaptive weights presented in
Table 2. The configuration parameters of MSOGI-FLL are presented in
Table 3.
3.2. Simulation Results
The simulation scenarios proposed in this paper were developed to demonstrate the behavior of SDFLC + 3WFLC in the occurrence of several electrical grid disturbances. The MSOGI-FLL and, in frequency results, the original WFLC were used to establish parameters for comparison with SDFLC + 3WFLC. The proposed simulation scenarios are presented in
Table 4.
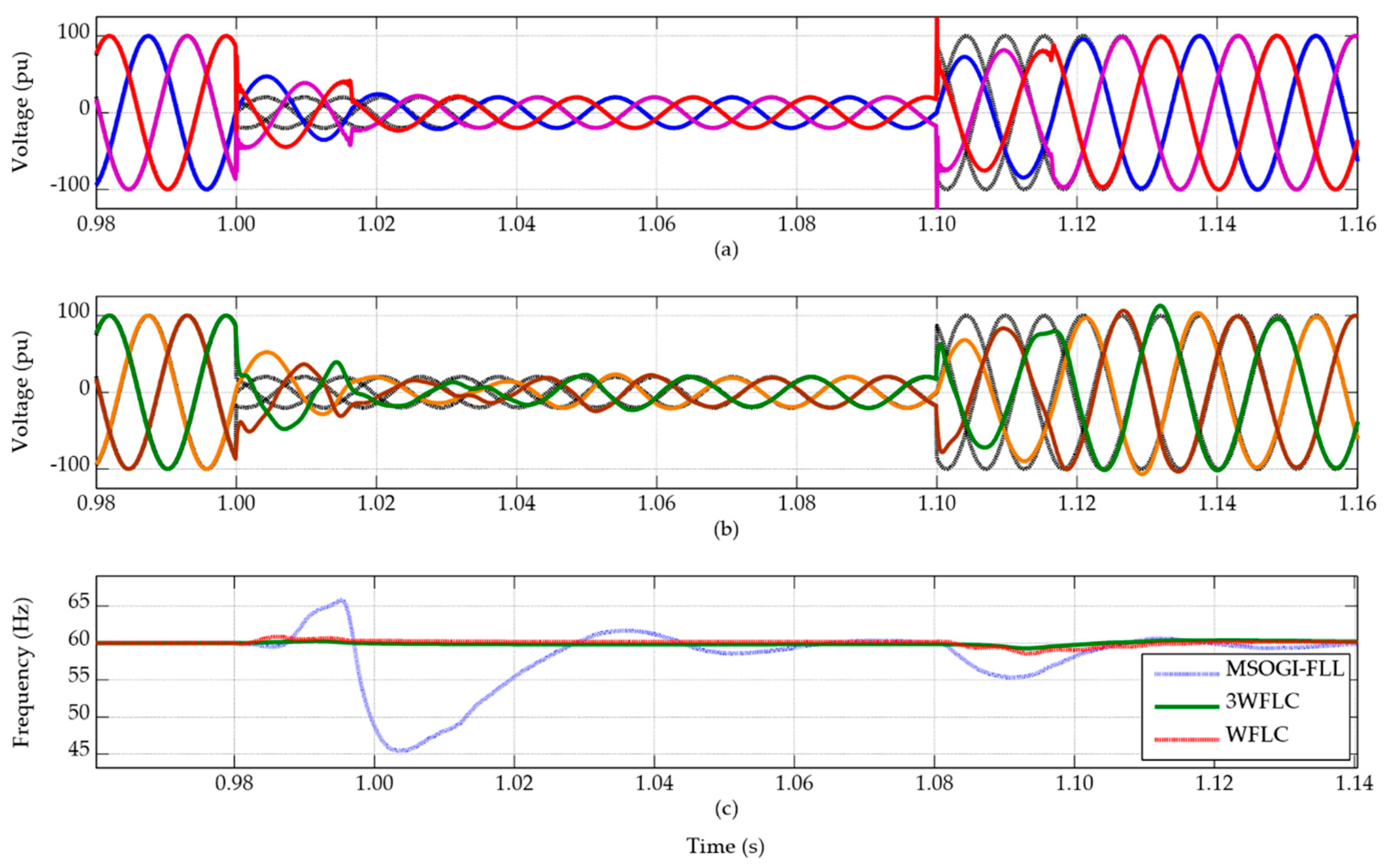
In SC1, the power grid suffers a voltage drop from 1 pu to 0.2 pu peak-to-peak in 1.0 s, returning to nominal voltage in 1.1 s. In this scenario, the algorithms synchronization time with the original signal after the sudden voltage variations and the frequency transients caused by this variation were observed.
Figure 3 presents the voltage results for SDFLC and MSOGI-FLL and frequency results for 3WFLC, WFLC, and MSOGI-FLL.
The sudden voltage variation caused a disturbance in frequency tracking. After the voltage sag, the SDFLC and MSOGI synchronize again with the original signal in one cycle and two cycles respectively. In frequency tracking, 3WFLC presented a smaller frequency sag of 59.2 Hz, while WFLC and MSOGI-FLL presented 58.8 Hz and 45.5 Hz respectively.
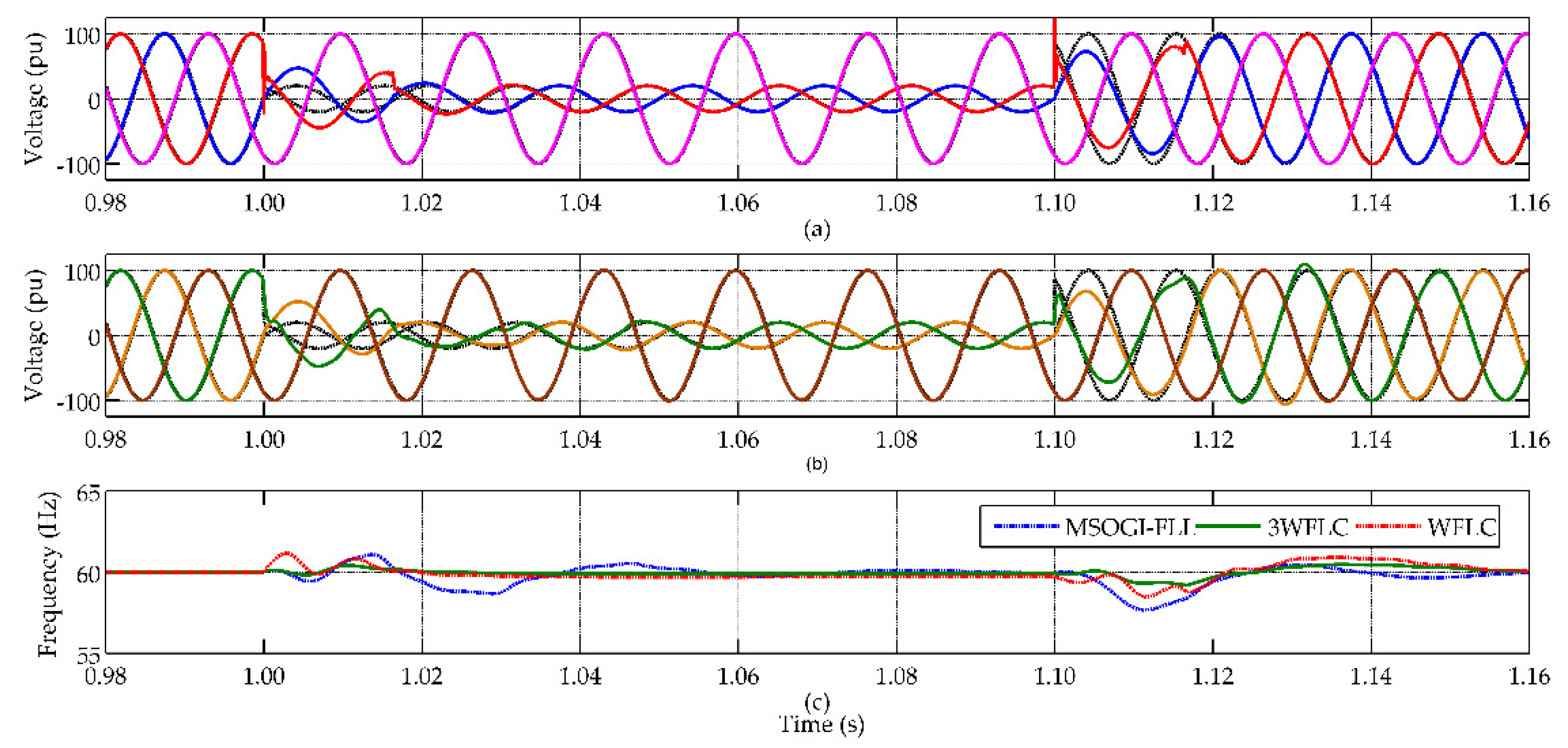
In SC2, the power grid suffers an asymmetric voltage sag in phases A and C from 1 pu to 0.2 pu peak-to-peak in 1.0 s, returning to nominal voltage in 1.1 s. Once again, the synchronization time of the algorithms with the original signal and frequency disturbances were observed.
Figure 4 presents the voltage results for SDFLC and MSOGI-FLL and frequency results for 3WFLC, WFLC, and MSOGI-FLL.
The sudden voltage variation in phases A and C caused a disturbance in frequency tracking. After the voltage sag, the SDFLC and MSOGI synchronize again with the original signal in one cycle and two cycles respectively. In frequency tracking, 3WFLC presented the smaller frequency sag of 59.2 Hz, while WFLC and MSOGI-FLL presented 58.8 Hz and 57.7 Hz respectively.
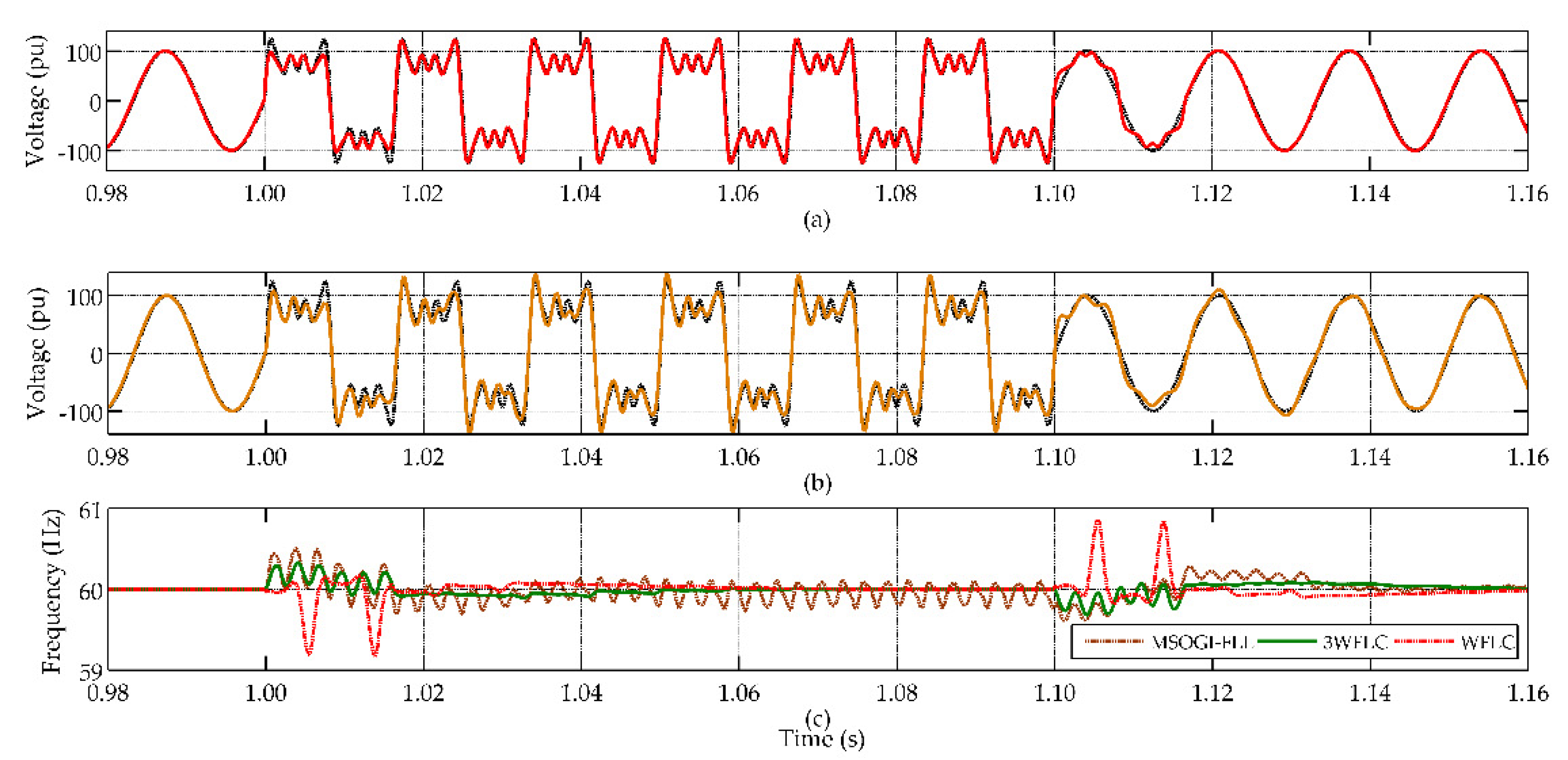
The SC3 is a harmonic injection scenario. From instant 1.0 s to 2.1 s, the 3rd, 5th, 7th, and 11th harmonic components are injected in the power grid according to its conventional symmetrical components and the Total harmonic Distortion (THD) is 65%.
Figure 5 presents the voltage results for SDFLC and MSOGI-FLL and frequency results for 3WFLC, WFLC, and MSOGI-FLL.
After the disturbance, the harmonic components were tracked in one cycle by SDFLC and two cycles by MSOGI-FLL. The high harmonic injection caused an oscillating deviation in MSOGI-FLL, and a maximum frequency of 60.5 Hz. A maximum of 60.9 Hz and 60.3 Hz was observed in WFLC and 3WFLC respectively. It is also possible to observe that both FLC strategies show a minor oscillation around the frequency during harmonic injection and the 3WFLC presents the minor overshooting.
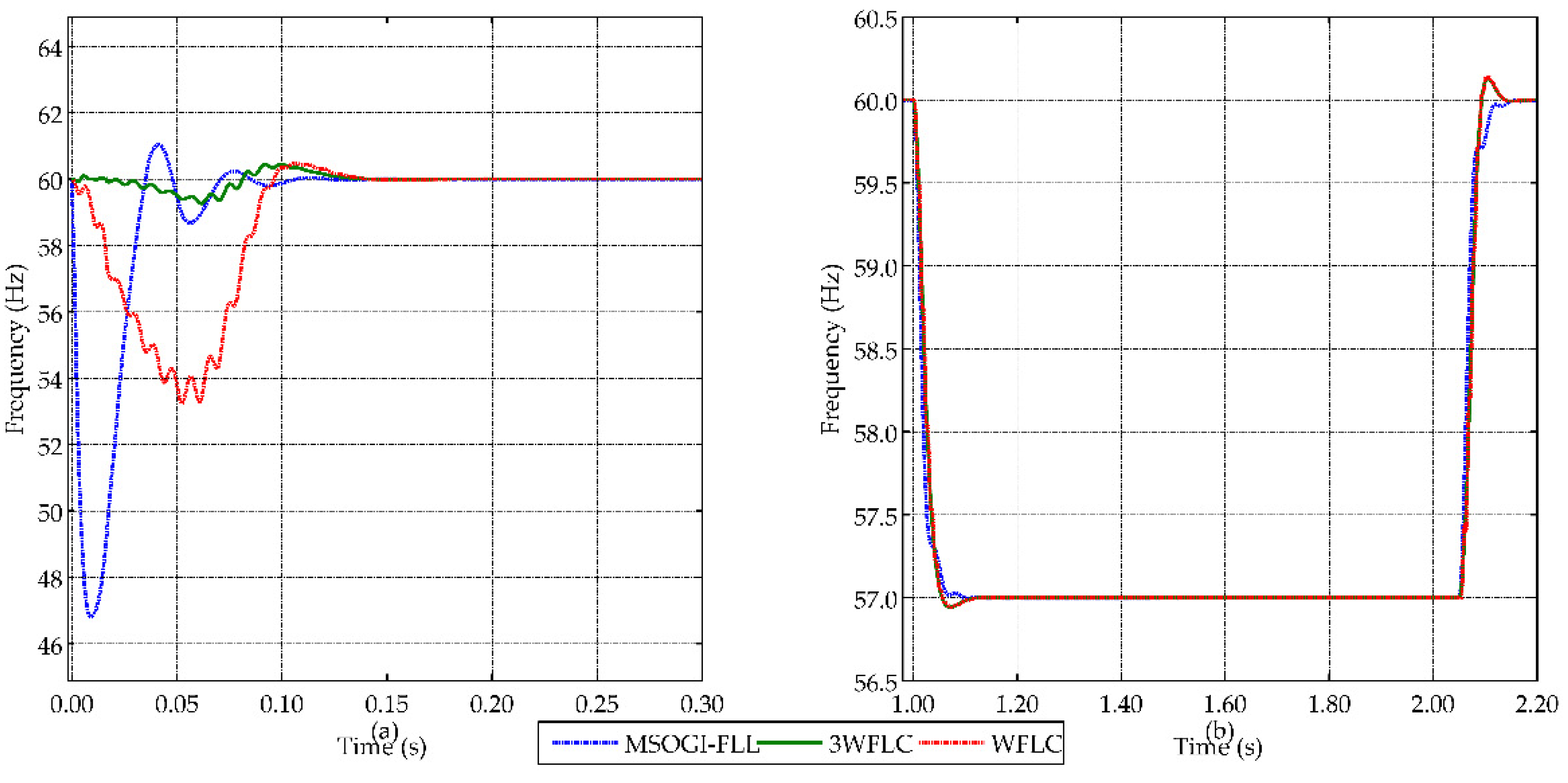
The SC4 is about frequency variation in two different moments. The first analyzes the behavior of the strategies after the start of voltage measurements in the power grid. The second is the sudden variation of the signal fundamental frequency from 60 Hz to 57 Hz for 1.1 s.
Figure 6 presents the frequency results.
In
Figure 6a, after the measuring starts, the three strategies presented an overshooting until synchronization at 12.5 ms. The maximum overshoot presented was 47 Hz, 54.5 Hz and 59.5 Hz for MSOGI-FLL, WFLC and 3WFLC respectively. In
Figure 6b, the three strategies achieved similar behavior, synchronizing with the new frequencies at 1.15 s and 2.15 s. The WFLC and 3WFLC had a 60.15 Hz overshoot, while MSOGI-FLL did not have any overshoot.
After analyzing the different proposed scenarios, it is possible to compare the three strategies. The SDFLC + 3WFLC showed a minor voltage and frequency deviation in SC1 and SC2. Also, SDFLC + 3WFLC presented better transient performance and lesser settling time. In addition, 3WFLC didn’t present any behavior difference for symmetrical or asymmetrical drop in SC1 and SC2, which was expected because 3WFLC tracks fundamental positive sequence frequency and therefore is more robust in the face of asymmetrical disturbs. Throughout the SC3, SDFLC + 3WFLC showed a minor frequency overshooting and better performance on frequency tracking than MSOGI-FLL and SDFLC + WFLC. In SC4, on the sudden input test, the SDFLC + 3WFLC presented a better performance with minor overshooting and settling time. Thus, it can be seen that SDFLC + 3WFLC is an alternative for tracking fundamental, harmonics and sequence components.
Table 5 presents a final comparison about settling time and overshooting for strategies presented in this section.
Comparing the three algorithms regarding the processing time during the simulations, it can be verified through the simulation software that MSOGI-FLL has a processing time of 4.03 μs, SDFLC + WFLC had a processing time of 7.82 μs and SDFLC + 3WFLC had a processing time of 9.19 μs. SDFLC + 3WFLC has a bigger processing time, but adds a greater harmonic and sequential components selectivity without compromising the system’s processing time.

 ,
, 















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}