A Quasi-Average Estimation Aided Hierarchical Control Scheme for Power Electronics-Based Islanded Microgrids

 , ,
, ,
Abstract
:
1. Introduction
- (1)
- An innovative distributed quasi-averaging based approach for active power sharing in islanded microgrids that improves upon existing methods.
- (2)
- A multi-layer, distributed control structure that eliminates the need for centralized monitoring and control.
- (3)
- Analysis of resilience of the proposed methodology under communication latencies.
- (4)
- A small signal analysis for studying MG system stability under the proposed control scheme.
- (5)
- Comparison of the proposed methodology with conventional communication and consensus-based power sharing.
2. Problem Description
2.1. Micro-grid Power Network
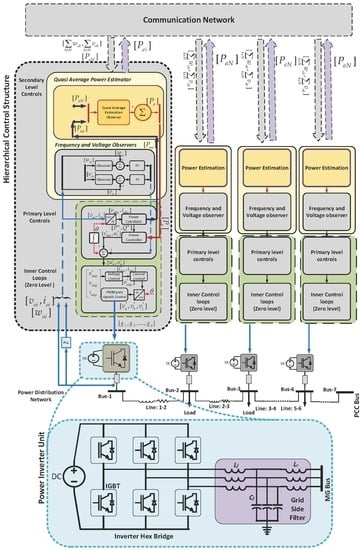
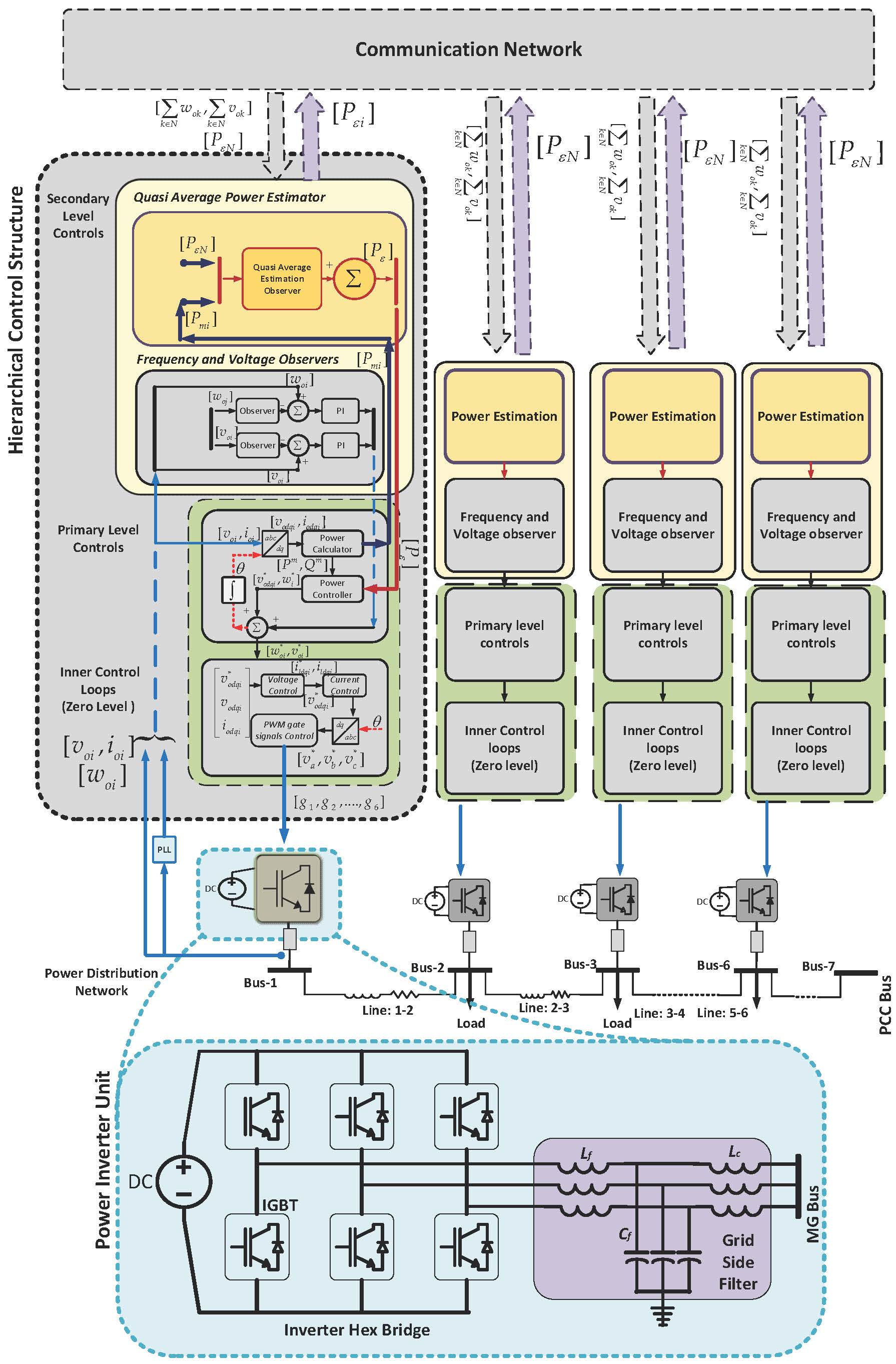
2.2. Hierarchical Control Structure and Information Exchange Media
2.3. Network Latencies
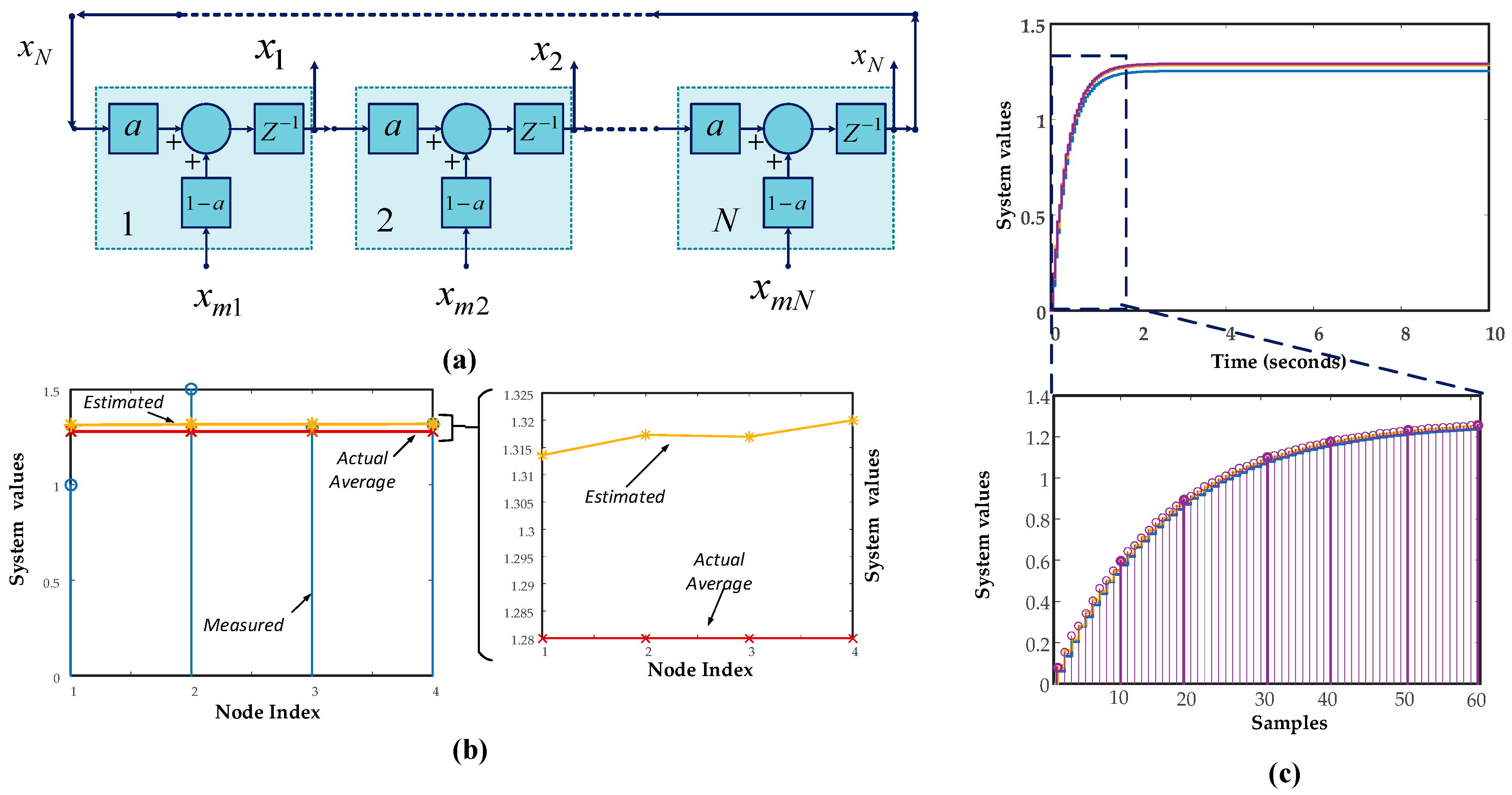
3. Distributed Quasi-average Estimation
Elaboration: Distributed Estimation of Measured Power through Quasi-Average estimation
4. Conventional Consensus Observers
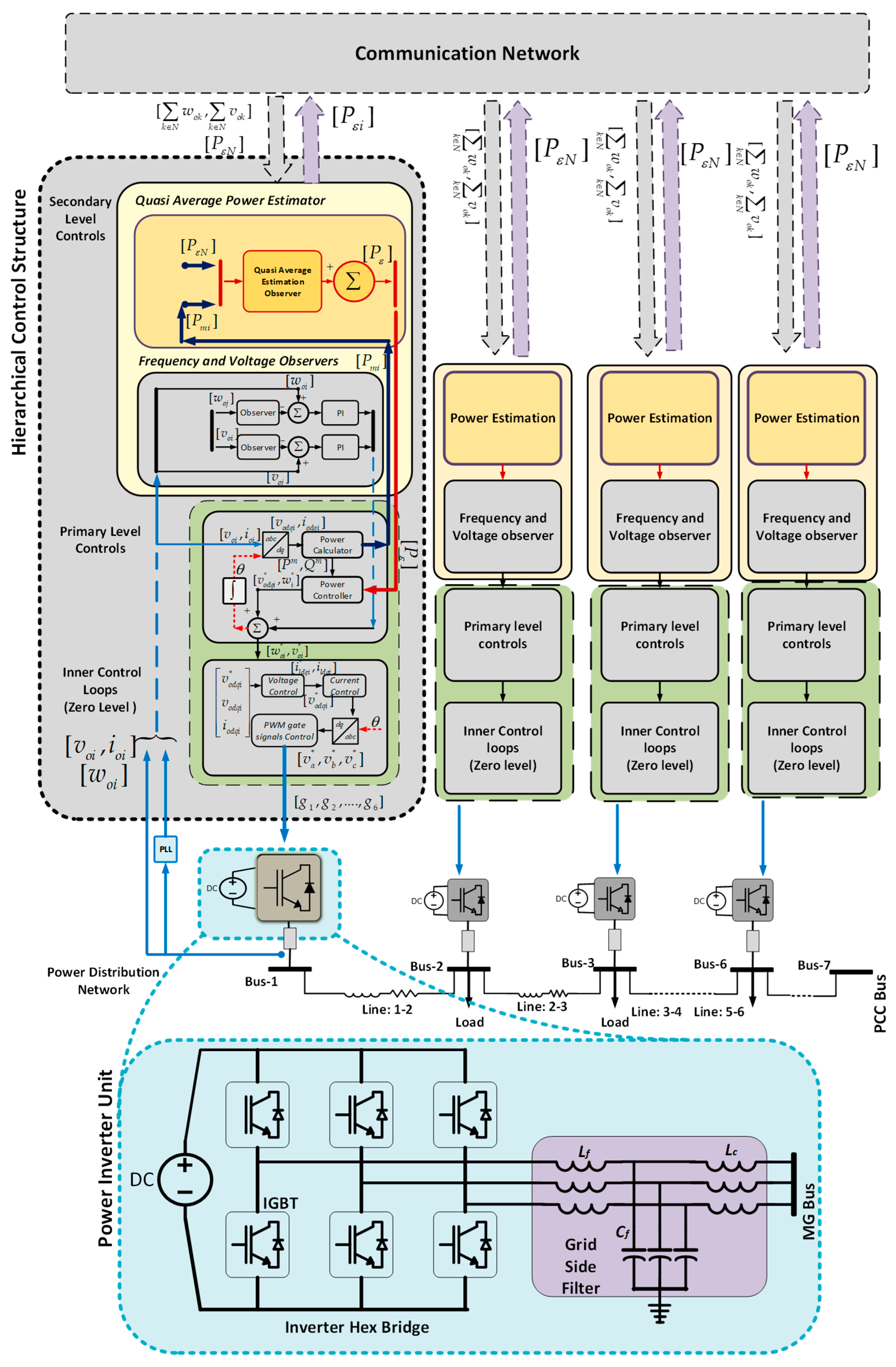
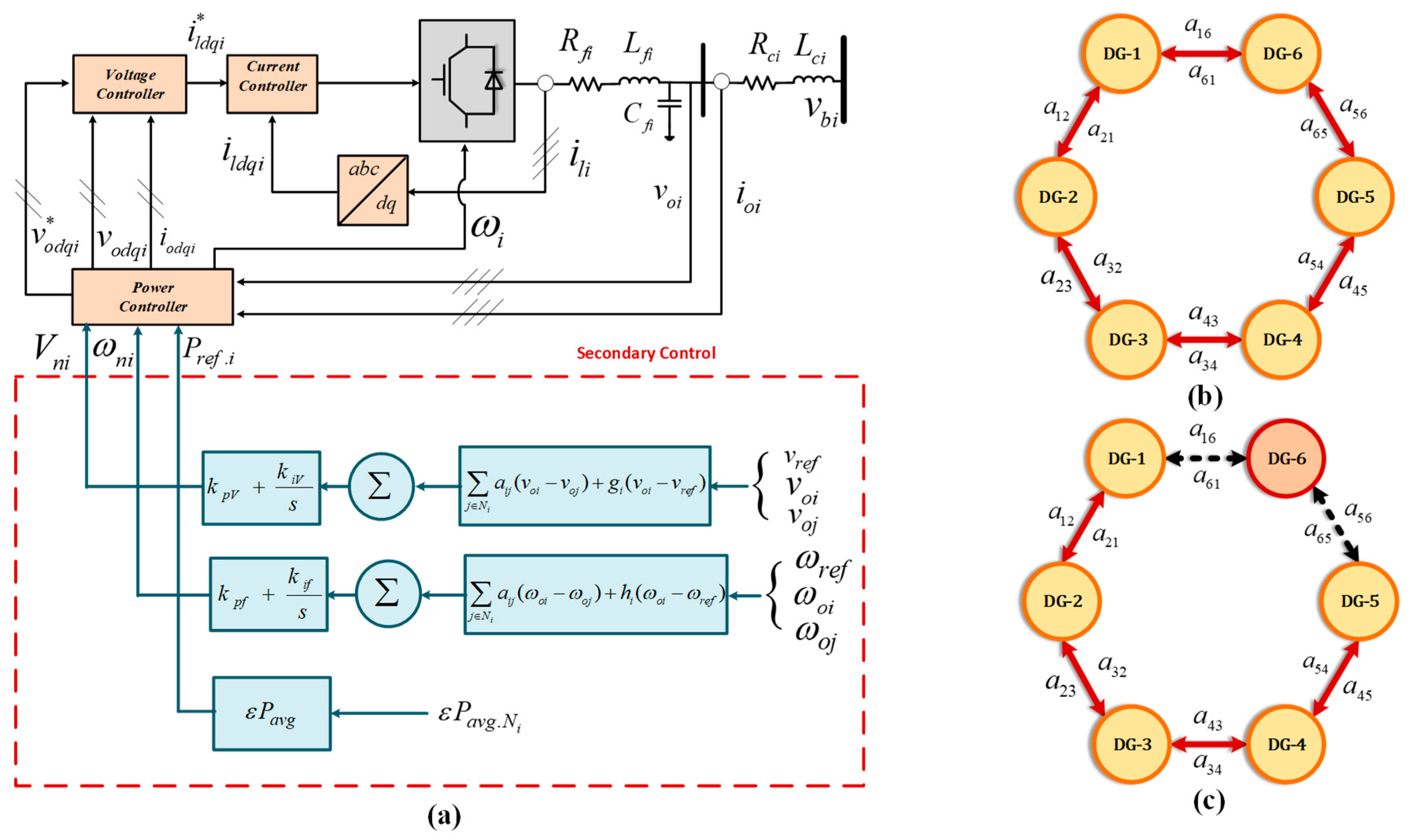
5. Secondary Regulation: Frequency and Voltage
6. Small Signal Model of the Microgrid System
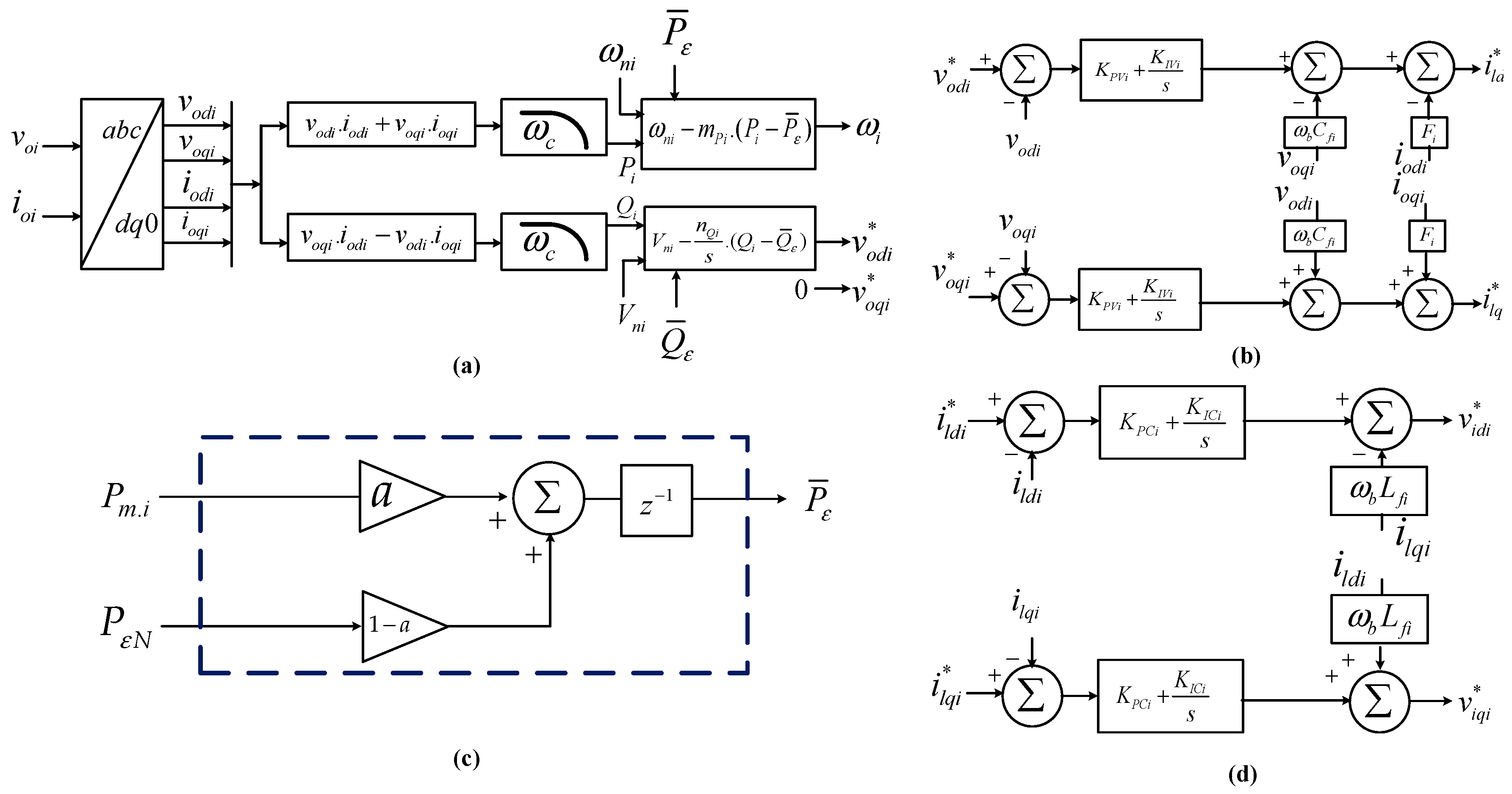
6.1. Fundamental/Zero Level Controls
6.2. Primary Power Balancing Control
6.3. Secondary Controls
6.4. Inverter Grid-side Filters
6.5. Model of an Individual Inverter
6.6. Combined Model of Inverters
6.7. Network and Load Model
6.8. Complete Model of Micro Grid
7. Discretization of System Models
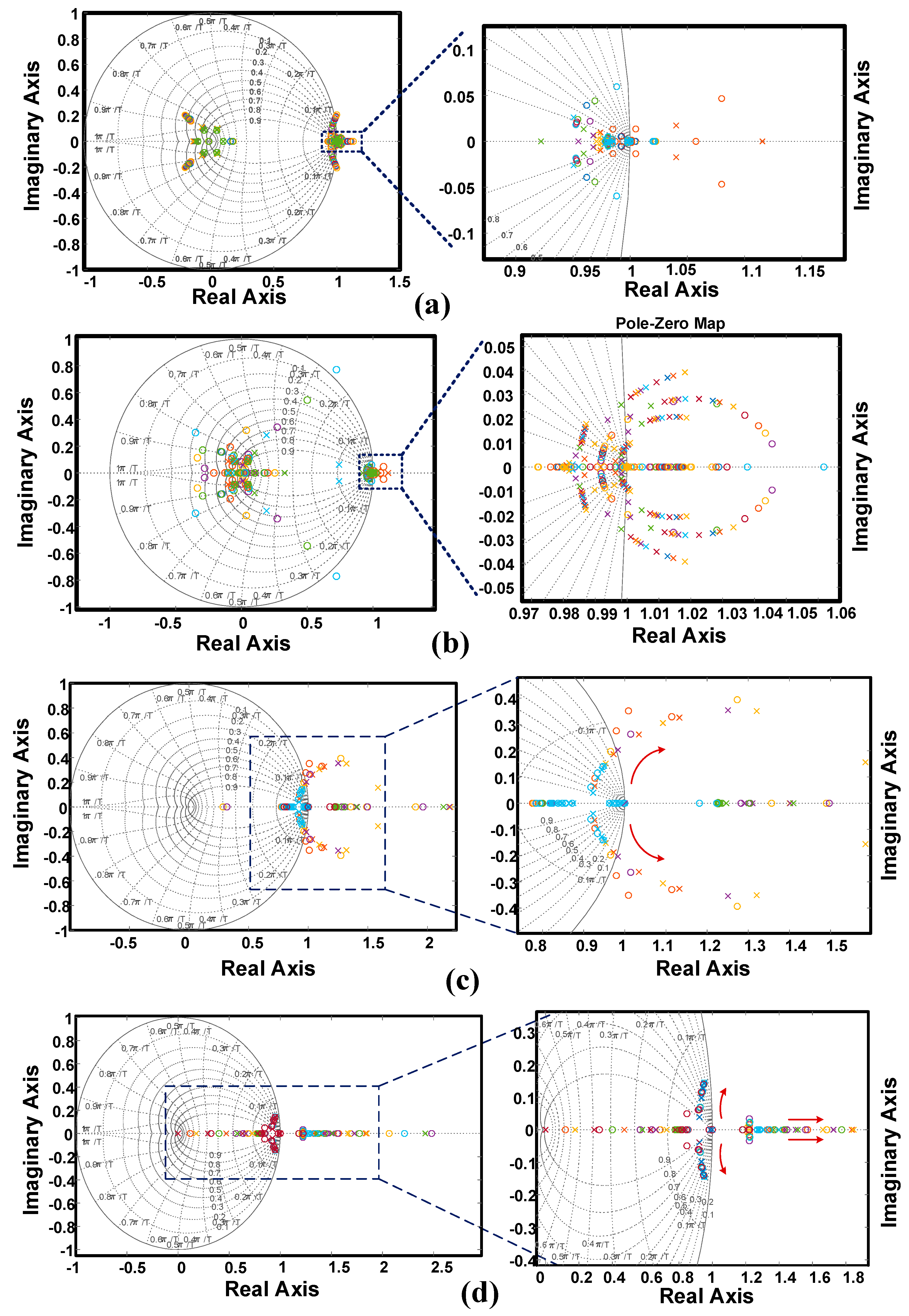
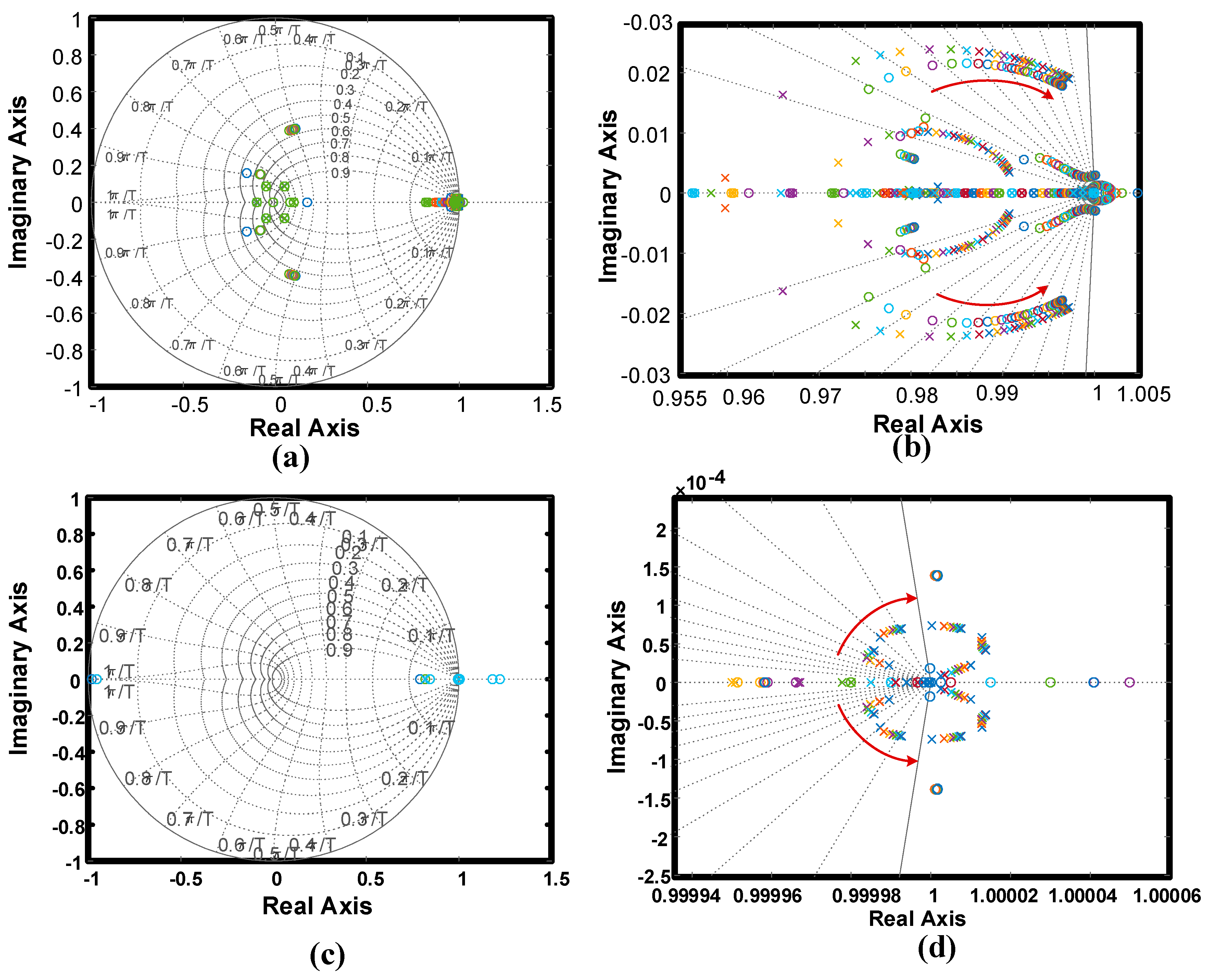
8. Stability Analysis Studies
9. Case Study simulations
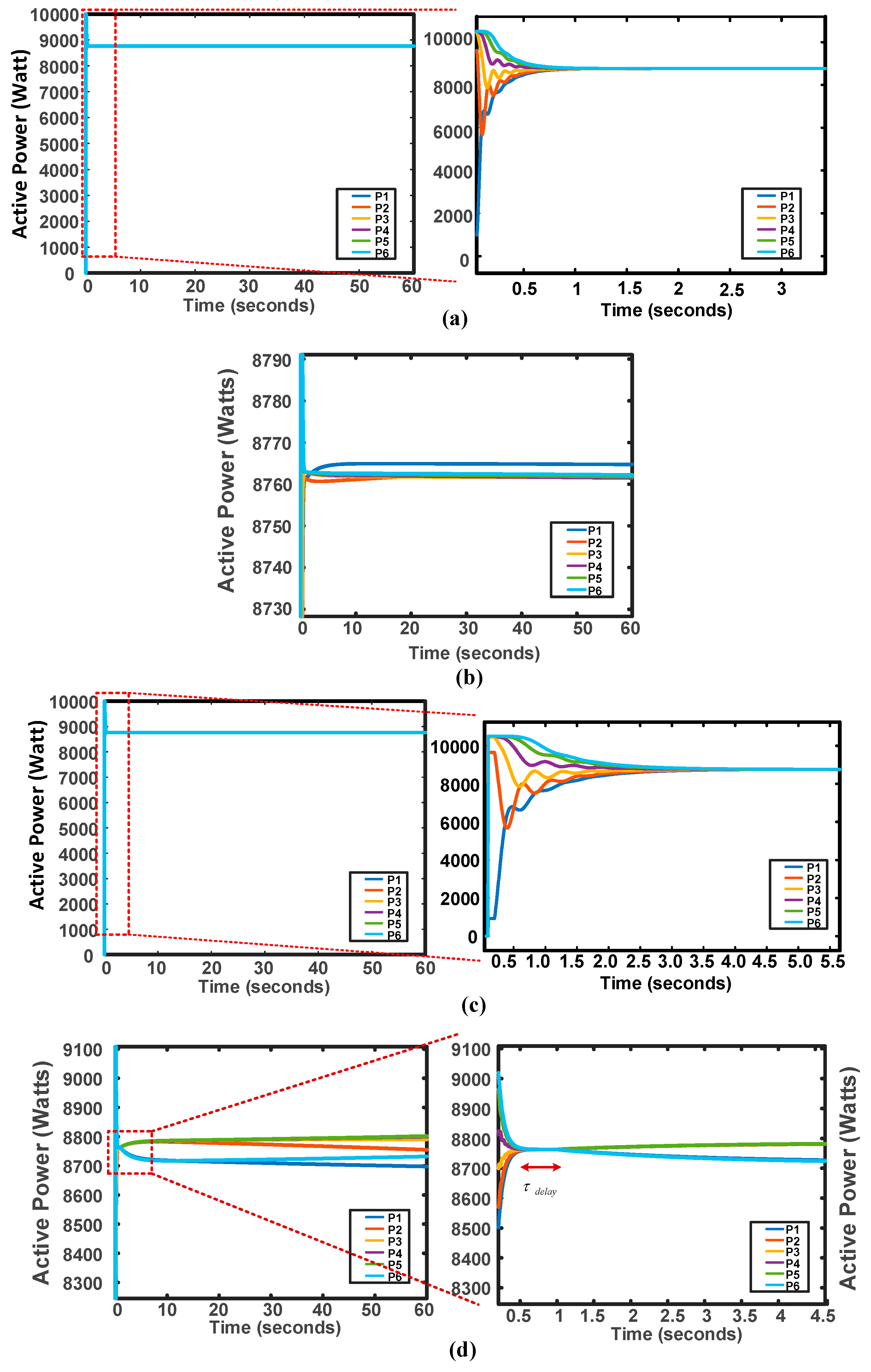
9.1. Active Power Sharing
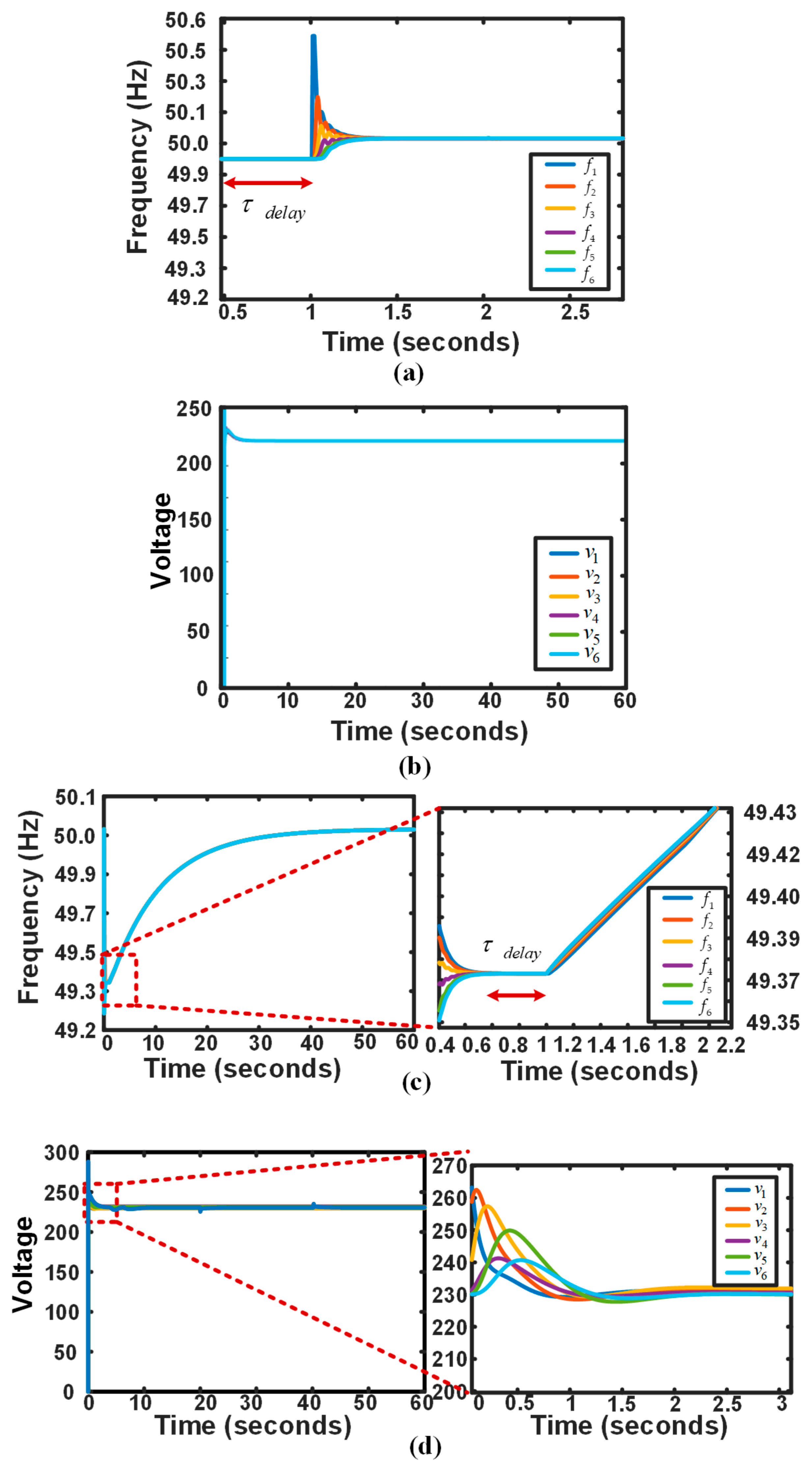
9.2. Frequency Regulation
9.3. Voltage Regulation
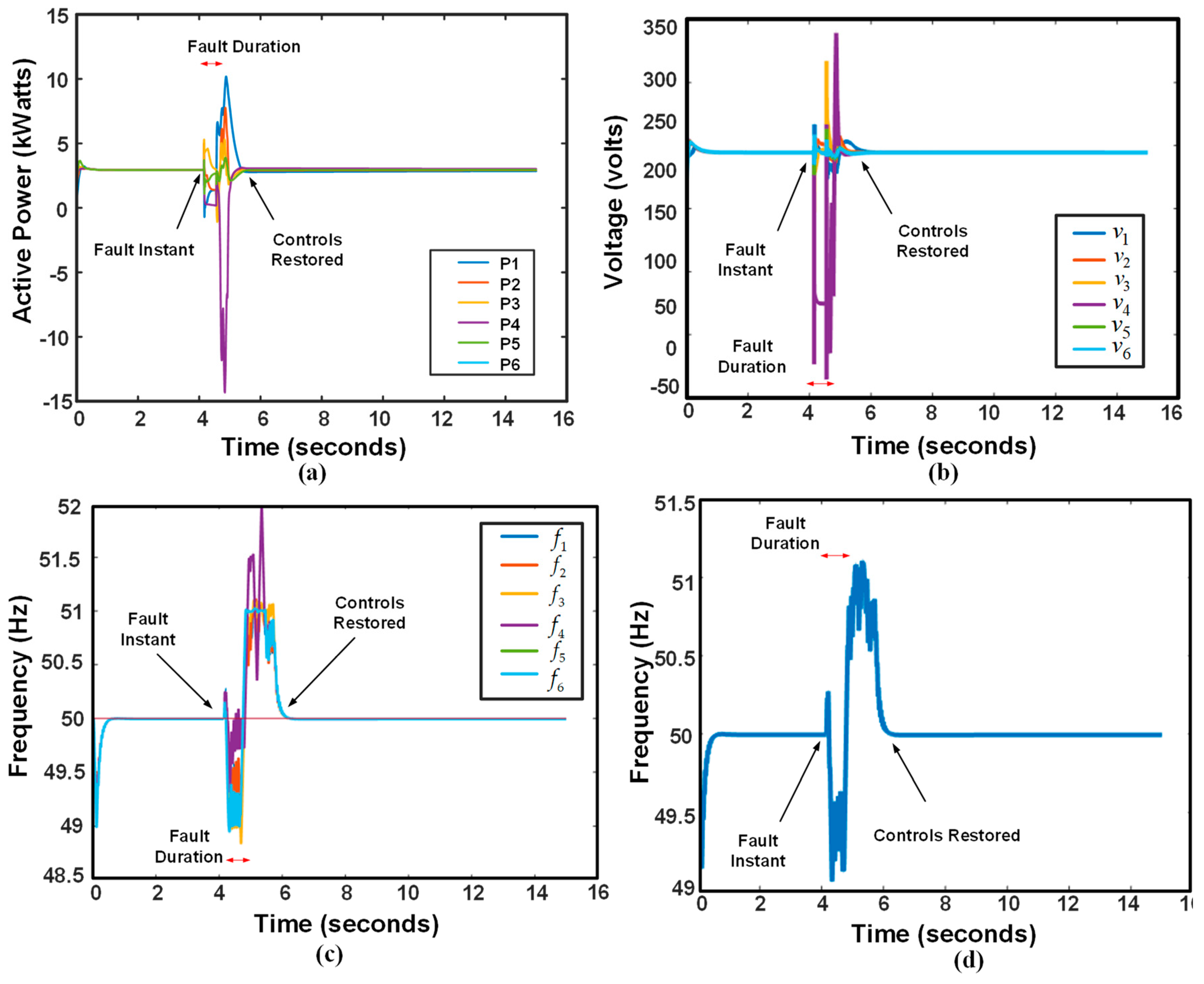
9.4. Performance of Controllers under Grid Faults
10. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. System Matrices
Appendix B
Appendix C
References
- Zeng, Z.; Yang, H.; Zhao, R. Study on small signal stability of microgrids: A review and a new approach. Renew. Sustain. Energy Rev. 2011, 15, 4818–4828. [Google Scholar] [CrossRef]
- Han, Y.; Li, H.; Shen, P.; Coelho, E.A.A.; Guerrero, J.M. Review of Active and Reactive Power Sharing Strategies in Hierarchical Controlled Microgrids. IEEE Trans. Power Electron. 2017, 32, 2427–2451. [Google Scholar] [CrossRef]
- Habib, S.; Khan, M.M.; Abbas, F.; Sang, L.; Shahid, M.U.; Tang, H. A Comprehensive Study of Implemented International Standards, Technical Challenges, Impacts and Prospects for Electric Vehicles. IEEE Access 2018, 6, 13866–13890. [Google Scholar] [CrossRef]
- Hossain, M.A.; Pota, H.R.; Issa, W.; Hossain, M.J. Overview of AC microgrid controls with inverter-interfaced generations. Energies 2017, 10, 1300. [Google Scholar] [CrossRef]
- Li, C.; Dragicevic, T.; Vasquez, J.C.; Guerrero, J.M.; Coelho, E.A.A. Multi-agent-based distributed state of charge balancing control for distributed energy storage units in AC microgrids. In Proceedings of the 2015 IEEE Applied Power Electronic Conference Exposition, Charllote, NC, USA, 15–19 March 2015; Volume 53, pp. 2967–2973. [Google Scholar] [CrossRef]
- Ghanaatian, M.; Lotfifard, S. Control of Flywheel Energy Storage Systems in Presence of Uncertainties. IEEE Trans. Sustain. Energy 2018, 3029. [Google Scholar] [CrossRef]
- Habib, S.; Kamran, M.; Rashid, U. Impact analysis of vehicle-to-grid technology and charging strategies of electric vehicles on distribution networks—A review. J. Power Sources 2015, 277, 205–214. [Google Scholar] [CrossRef]
- Guan, Y.; Meng, L.; Li, C.; Vasquez, J.C.; Guerrero, J.M. Discharge rate balancing control strategy based on dynamic consensus algorithm for energy storage units in AC microgrids. In Proceedings of the IEEE Applied Power Electronics Conference and Exposition APEC, Tampa, FL, USA, 26–30 March 2017; pp. 2788–2794. [Google Scholar]
- Li, H.; Han, Y.; Yang, P.; Xiong, J.; Wang, C.; Guerrero, J.M. A proportional harmonic power sharing scheme for hierarchical controlled microgrids considering unequal feeder impedances and nonlinear loads. In Proceedings of the IEEE Energy Conversion Congrgress Exposition ECCE, Cincinnati, OH, USA, 1–5 October 2017; pp. 3722–3727. [Google Scholar] [CrossRef]
- Han, H.; Hou, X.; Yang, J.; Wu, J.; Su, M.; Guerrero, J.M. Review of power sharing control strategies for islanding operation of AC microgrids. IEEE Trans. Smart Grid 2016, 7, 200–215. [Google Scholar] [CrossRef]
- Baghaee, H.R.; Mirsalim, M.; Gharehpetian, G.B. Power Calculation Using RBF Neural Networks to Improve Power Sharing of Hierarchical Control Scheme in Multi-DER Microgrids. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 1217–1225. [Google Scholar] [CrossRef]
- Rokrok, E.; Golshan, M.E.H. Adaptive voltage droop scheme for voltage source converters in an islanded multibus microgrid. IET Gener. Transm. Distrib. 2010, 4, 562. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Matas, J.; de Vicuna, L.G.; Castilla, M.; Miret, J. Decentralized control for parallel operation of distributed generation inverters using resistive output impedance. IEEE Trans. Ind. Electron. 2007, 54, 994–1004. [Google Scholar] [CrossRef]
- Guerrero, J.M.; De Vicuña, L.G.; Matas, J.; Miret, J.; Castilla, M. Output impedance design of parallel-connected UPS inverters. In Proceedings of the IEEE International Symposium Industrial Electronic, Ajaccio, France, 4–7 May 2004; Volume 2, pp. 1123–1128. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Matas, J.; De Vicuña, L.G.; Castilla, M.; Miret, J. Wireless-control strategy for parallel operation of distributed-generation inverters. IEEE Trans. Ind. Electron. 2006, 53, 1461–1470. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Vásquez, J.C.; Matas, J.; Castilla, M.; García de Vicuna, L. Control strategy for flexible microgrid based on parallel line-interactive UPS systems. IEEE Trans. Ind. Electron. 2009, 56, 726–736. [Google Scholar] [CrossRef]
- De Brabandere, K.; Bolsens, B.; Van Den Keybus, J.; Woyte, A.; Driesen, J.; Belmans, R. A voltage and frequency droop control method for parallel inverters. In Proceedings of the IEEE 35th Annual Power Electronic Specialists Conference, Aachen, Germany, 20–25 June 2004; Volume 4, pp. 2501–2507. [Google Scholar] [CrossRef]
- Alizadeh, E.; Birjandi, A.M.; Hamzeh, M. Decentralised power sharing control strategy in LV microgrids under unbalanced load conditions. IET Gener. Transm. Distrib. 2017, 11, 1613–1623. [Google Scholar] [CrossRef]
- Xia, Y.; Peng, Y.; Wei, W. Triple droop control method for ac microgrids. IET Power Electron. 2017, 10, 1705–1713. [Google Scholar] [CrossRef]
- Bidram, A.; Nasirian, V.; Davoudi, A.; Lewis, F.L. Droop-free distributed control of AC microgrids. In Cooperative Synhronization in Disturbed Microgrid Control; Springer International Publishing: New York, NY, USA, 2017; Volume 31, pp. 141–171. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Chandorkar, M.; Lee, T.L.; Loh, P.C. Advanced control architectures for intelligent microgridspart i: Decentralized and hierarchical control. IEEE Trans. Ind. Electron. 2013, 60, 1254–1262. [Google Scholar] [CrossRef]
- Shahid, M.U.; Hashmi, K.; Habib, S.; Mumtaz, M.A.; Tang, H. A Hierarchical Control Methodology for Renewable DC Microgrids Supporting a Variable Communication Network Health. Electronics 2018, 7, 418. [Google Scholar] [CrossRef]
- Bidram, A.; Member, S.; Davoudi, A.; Lewis, F.L.; Guerrero, J.M.; Member, S. Distributed Cooperative Secondary Control of Microgrids Using Feedback Linearization. IEEE Trans. Power Electron. 2013, 28, 3462–3470. [Google Scholar] [CrossRef] [Green Version]
- Lu, L.Y.; Chu, C.C. Consensus-Based Secondary Frequency and Voltage Droop Control of Virtual Synchronous Generators for Isolated AC Micro-Grids. IEEE J. Emerg. Sel. Top. Circuits Syst. 2015, 5, 443–455. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, H.; Li, C. Distributed finite-time cooperative control of droop-controlled microgrids under switching topology. IET Renew. Power Gener. 2017, 11, 707–714. [Google Scholar] [CrossRef]
- Sanjari, M.J.; Gharehpetian, G.B. Unified framework for frequency and voltage control of autonomous microgrids. IET Gener. Transm. Distrib. 2013, 7, 965–972. [Google Scholar] [CrossRef]
- Lewis, F.L.; Qu, Z.; Davoudi, A.; Bidram, A. Secondary control of microgrids based on distributed cooperative control of multi-agent systems. IET Gener. Transm. Distrib. 2013, 7, 822–831. [Google Scholar] [CrossRef]
- Liu, W.; Gu, W.; Xu, Y.; Wang, Y.; Zhang, K. General distributed secondary control for multi-microgrids with both PQ-controlled and droop-controlled distributed generators. IET Gener. Transm. Distrib. 2017, 11, 707–718. [Google Scholar] [CrossRef]
- Zuo, S.; Davoudi, A.; Song, Y.; Lewis, F.L. Distributed Finite-Time Voltage and Frequency Restoration in Islanded AC Microgrids. IEEE Trans. Ind. Electron. 2016, 63, 5988–5997. [Google Scholar] [CrossRef]
- Guo, F.; Wen, C.; Mao, J.; Song, Y.D. Distributed Secondary Voltage and Frequency Restoration Control of Droop-Controlled Inverter-Based Microgrids. IEEE Trans. Ind. Electron. 2015, 62, 4355–4364. [Google Scholar] [CrossRef]
- Lu, X.; Yu, X.; Lai, J.; Guerrero, J.M.; Zhou, H. Distributed Secondary Voltage and Frequency Control for Islanded Microgrids With Uncertain Communication Links. IEEE Trans. Ind. Inform. 2017, 13, 448–460. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Wang, X.; Chen, Z.; Blaabjerg, F. Distributed optimal control of reactive power and voltage in islanded microgrids. IEEE Trans. Ind. Appl. 2017, 53, 340–349. [Google Scholar] [CrossRef]
- Hashmi, K.; Khan, M.M.; Habib, S.; Tang, H. An Improved Control Scheme for Power Sharing between Distributed Power Converters in Islanded AC Microgrids. In Proceedings of the International Conference on Frontiers of Information Technology, Islamabad, Pakistan, 18–20 December 2017; pp. 270–275. [Google Scholar] [CrossRef]
- Schiffer, J.; Seel, T.; Raisch, J.; Sezi, T. Voltage Stability and Reactive Power Sharing in Inverter-Based Microgrids with Consensus-Based Distributed Voltage Control. IEEE Trans. Control Syst. Technol. 2016, 24, 96–109. [Google Scholar] [CrossRef]
- Han, Y.; Zhang, K.; Li, H.; Coelho, E.A.A.; Guerrero, J.M. MAS-Based Distributed Coordinated Control and Optimization in Microgrid and Microgrid Clusters: A Comprehensive Overview. IEEE Trans. Power Electron. 2018, 33, 6488–6508. [Google Scholar] [CrossRef] [Green Version]
- Hashmi, K.; Mansoor Khan, M.; Jiang, H.; Umair Shahid, M.; Habib, S.; Talib Faiz, M.; Tang, H. A Virtual Micro-Islanding-Based Control Paradigm for Renewable Microgrids. Electronics 2018, 7, 105. [Google Scholar] [CrossRef]
- Guan, Y.; Meng, L.; Li, C.; Vasquez, J.; Guerrero, J. A Dynamic Consensus Algorithm to Adjust Virtual Impedance Loops for Discharge Rate Balancing of AC Microgrid Energy Storage Units. IEEE Trans. Smart Grid 2017, 9, 4847–4860. [Google Scholar] [CrossRef]
- Shahid, M.U.; Khan, M.M.; Hashmi, K.; Habib, S.; Jiang, H.; Tang, H. A Control Methodology for Load Sharing System Restoration in Islanded DC Micro Grid with Faulty Communication Links. Electronics 2018, 7, 90. [Google Scholar] [CrossRef]
- Khan, M.; Khan, M.; Jiang, H.; Hashmi, K.; Shahid, M. An Improved Control Strategy for Three-Phase Power Inverters in Islanded AC Microgrids. Inventions 2018, 3, 47. [Google Scholar] [CrossRef]
- Bidram, A.; Nasirian, V.; Davoudi, A.; Lewis, F.L. Cooperative Synchronization in Distributed Microgrid Control, 1st ed.; Grimble, M.J., Ed.; Springer International Publishing: New York, NY, USA, 2017; ISBN 978-3-319-50807-8. [Google Scholar]
- Coelho, E.A.A.; Wu, D.; Guerrero, J.M.; Vasquez, J.C.; Dragičević, T.; Stefanović, Č.; Popovski, P. Small-Signal Analysis of the Microgrid Secondary Control Considering a Communication Time Delay. IEEE Trans. Ind. Electron. 2016, 63, 6257–6269. [Google Scholar] [CrossRef] [Green Version]
- Mahmoud, M.S.; AL-Sunni, F.M. Control and Optimization of Distributed Generation Systems, 1st ed.; Springer International Publishing: New York, NY, USA, 2015; ISBN 978-3-319-16909-5. [Google Scholar]
- Schiffer, J.; Dörfler, F.; Fridman, E. Robustness of distributed averaging control in power systems: Time delays & dynamic communication topology. Automatica 2017, 80, 261–271. [Google Scholar] [CrossRef] [Green Version]
- Shenoi, B.A. Introduction to Digital Signal Processing and Filter Design, 1st ed.; John Wiley & Sons: Hoboken, NJ, USA, 2006; ISBN 13 978-0-471-46482-2. [Google Scholar]
- Nasirian, V.; Moayedi, S.; Davoudi, A.; Lewis, F.L. Distributed cooperative control of dc microgrids. IEEE Trans. Power Electron. 2015, 30, 2288–2303. [Google Scholar] [CrossRef]
- Mariani, V.; Vasca, F.; Vasquez, J.C.; Guerrero, J.M. Model Order Reductions for Stability Analysis of Islanded Microgrids With Droop Control. IEEE Trans. Ind. Electron. 2015, 62, 4344–4354. [Google Scholar] [CrossRef] [Green Version]
- Pogaku, N.; Prodanović, M.; Green, T.C. Modeling, analysis and testing of autonomous operation of an inverter-based microgrid. IEEE Trans. Power Electron. 2007, 22, 613–625. [Google Scholar] [CrossRef]
- Yu, K.; Ai, Q.; Wang, S.; Ni, J.; Lv, T. Analysis and Optimization of Droop Controller for Microgrid System Based on Small-Signal Dynamic Model. IEEE Trans. Smart Grid 2016, 7, 695–705. [Google Scholar] [CrossRef]
- Ogata, K. Discrete-Time Control Systems, 2nd ed.; Prentice-Hall International, Inc.: Uper Saddle River, NJ, USA, 1995; ISBN 0136156738. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Parameters | Values |
|---|---|---|---|
| Lf | 1.35 mH | mp | 4.5 × 10−6 |
| Rf | 0.1 Ω | nq | 1 × 10−6 |
| Cf | 25 µF | Kpf | 0.4 |
| Lc | 1.35 mH | Kif | 0.5 |
| Rc | 0.05 Ω | KpV | 0.5 |
| Rline | 0.1 Ω | KiV | 0.3 |
| Lline | 0.5 mH | F | 1 |
| fnom | 60 Hz | ωc | 60 Hz |
| Vnom | 415 VL-L |
| Bus. No. | Directly Connected Bus Load | |
|---|---|---|
| P (p. u.) | Q (p. u.) | |
| 1. | 0 | 0 |
| 2. | 0.3 | 0.3 |
| 3. | 0.25 | 0.25 |
| 4. | 0.25 | 0.25 |
| 5. | 0.25 | 0.25 |
| 6. | 0.25 | 0.25 |
| 7. | 0 | 0 |
| Sr.No. | Control Parameters | ||
|---|---|---|---|
| 1. | IIR gains | Min | Max |
| a | 0.5 | 0.98 | |
| Droop Gains | Min | Max | |
| mp | 1.0 × 10−10 | 1.0 × 10−3 | |
| nq | 1.0 × 10−7 | 1.0 × 10−3 | |
| 2. | Consensus frequency | ||
| kpf | 0.4 | 2.5 | |
| kif | 0.1 | 0.5 | |
| 3. | Consensus voltage | ||
| kpV | 0.5 | 3.5 | |
| kiV | 0.1 | 0.5 | |
| 4. | Time Delay | ||
| τdelay | 0 | 5 s | |
| Sr.No. | Parameter | Value |
|---|---|---|
| 1. | Fault Resistance | |
| Ron | 0.001 Ω | |
| 2. | Ground Resistance | |
| Rg | 0.01 Ω | |
| 3. | Snubber resistance | |
| Rs | 1 × 10−6 Ω | |
| 4. | Snubber capacitance | |
| Cs | inf | |
| 5. | Short circuit type | |
| L-L-L-G |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hashmi, K.; Mansoor Khan, M.; Xu, J.; Shahid, M.U.; Habib, S.; Faiz, M.T.; Tang, H. A Quasi-Average Estimation Aided Hierarchical Control Scheme for Power Electronics-Based Islanded Microgrids. Electronics 2019, 8, 39. https://doi.org/10.3390/electronics8010039
Hashmi K, Mansoor Khan M, Xu J, Shahid MU, Habib S, Faiz MT, Tang H. A Quasi-Average Estimation Aided Hierarchical Control Scheme for Power Electronics-Based Islanded Microgrids. Electronics. 2019; 8(1):39. https://doi.org/10.3390/electronics8010039
Chicago/Turabian StyleHashmi, Khurram, Muhammad Mansoor Khan, Jianming Xu, Muhammad Umair Shahid, Salman Habib, Muhammad Talib Faiz, and Houjun Tang. 2019. "A Quasi-Average Estimation Aided Hierarchical Control Scheme for Power Electronics-Based Islanded Microgrids" Electronics 8, no. 1: 39. https://doi.org/10.3390/electronics8010039