3.1. Dataflow Scheduling Method in WIA-PA
In this paper, a time slot channel resource scheduling method based on different scheduling constraints is designed and used to schedule the transmission of dataflows in WIA-PA. The related time slot conflicts situation is discussed in [
15,
16]. The symbols used in this method and their definitions are introduced in
Table 2. There are nine steps in this method, starting from step 1 and ending in step 9; all the steps are introduced here.
All link sets in the network are calculated using the IWNM, after which the link set (LS) shown in
Table 3 is obtained. According to the difference between the start and end, a complete data transmission link is divided into three link types. The first type is the node–router link: its LS has a combination of all the nodes and all the routers. The second type is the router–router link: its LS has a combination of the routers and all the routers. The third type is the router–gateway link: its LS has a combination of the routers and all the gateways.
In
Table 3, the symbol, “
” indicates the direction of the dataflows. The sending node of the dataflows is on the left side of
, whereas the receiving node is on the right.
According to the LS, the IWNM calculates the transmission path set (TPS) of every link shown in
Table 4. A link corresponds to a TPS composed of several devices. A link starts from the TPS of the first device and ends at the TPS of the last device.
To ensure that there is no conflict in the network, only one dataflow is allowed to be transmitted at the same time through the same channel and a time slot channel resource is designed in this study. In the form of the matrix shown in
Figure 2, all the time slot resources and available channel resources in the WIA-PA are employed to establish a time slot channel resource scheduling table. In this matrix, a unique channel and a unique time slot can form a unique time slot channel resource. For example, the resource circled in red is uniquely identified by the channel with number 1 and the slot with number 1. All time slot channel resources are initialized to idle in this step.
A transmission link is selected from the TPS in the order of the link sequence number and divided into several hops. The sending device of the first hop of any transmission link is the node and the receiving device of the last hop is the gateway. The sending and receiving devices of other hops are routers.
According to the time slot frequency hopping analysis of WIA-PA, to avoid conflict, four constraints are designed, as follows.
Constraint 1: in the scheduling unit composed of any channel and time slot, only one link can transmit data at most.
Constraint 2: in any time slot, the number of links for data transmission cannot exceed the number of channels.
Constraint 3: in any time slot, a node can transmit data with only one neighboring node.
Constraint 4: when data communication ends, all the data packets in the network must reach the industrial gateway.
According to these four constraints, each channel is traversed one by one, starting from the initial time slot, . If all the time slot channel resource modules under the current time slot are empty, module [, ] is selected, where the first channel is located as the resource scheduling module of the first hop . Meanwhile, the source and destination nodes of this hop are recorded and the channel resource module of the time slot is marked as occupied.
The number of hops to be scheduled is updated to the next hop . Additionally, the time slot is updated to . To ensure the balanced allocation of all channel resources, resource modules are selected for idle judgment and constraint judgment. If the result of the judgment is successful, the module becomes the resource scheduling module of the hop .
Step 6 is repeated until the time slot channel resource module is allocated for each hop of the current link. At this time, the scheduling of the current link ends. If the result of the judgment in step 6 is failure, then this step is skipped to step 8.
Each time slot channel resource module in time slot is traversed again, as are the idle judgment and the constraint judgment conditions. The first traversed module judged successful is selected as the resource scheduling module of the hop until the time slot channel resource module is allocated for each hop of the current link. At this time, the scheduling of the current link ends.
The next link is selected from the TPS in sequence. Steps 4–8 operate in sequence until all links are scheduled.
After scheduling, the time slot channel resource scheduling result shown in
Table 5 and the time slot channel resource module shown in
Table 6, called by each transmission link, are given as output.
In
Table 5, the symbol, “——,” indicates that there is no corresponding item. In a specific time slot of a specific channel, the resource is allocated to a specific hop, indicating that only the data of this hop can be transferred in this time slot of this channel. For example, in time slot
, only the data from
to
can occupy channel
.
In
Table 6, a specific link corresponds to several time slot channel resource modules, indicating that a dataflow occupies several different time slot channel resource modules to piece together a complete link to complete the data transmission. For example, the time slot channel resource module of
is
. Thus, time slot
and channel
will be occupied to complete the first hop of
, time slot
and channel
will be occupied to complete the first hop of
and time slot
and channel
will be occupied to complete the first hop of
.
According to
Table 5 and
Table 6, the state of the device in WIA-PA is configured to realize the scheduling of the dataflow in WIA-PA.
3.2. Dataflow Scheduling Method in TSN
In this study, a greedy time slot allocation (GTSA) scheduling algorithm is proposed for TSNs.
According to the characteristics of the dataflows to be transmitted, a GTSA transmits each data frame of different priority dataflows within
to optimize each dataflow. The symbols in this method are introduced in
Table 7 and the specific execution steps of this method are as follows.
Here, the frame transmission scheduling mechanism is introduced first and the specific execution steps of this method are shown.
3.2.1. Introduction to the Frame Transmission Scheduling Mechanism
The dataflow scheduling method in the TSN designed in this study is based on a frame transmission scheduling mechanism. Therefore, it is necessary to introduce a frame transmission scheduling mechanism first.
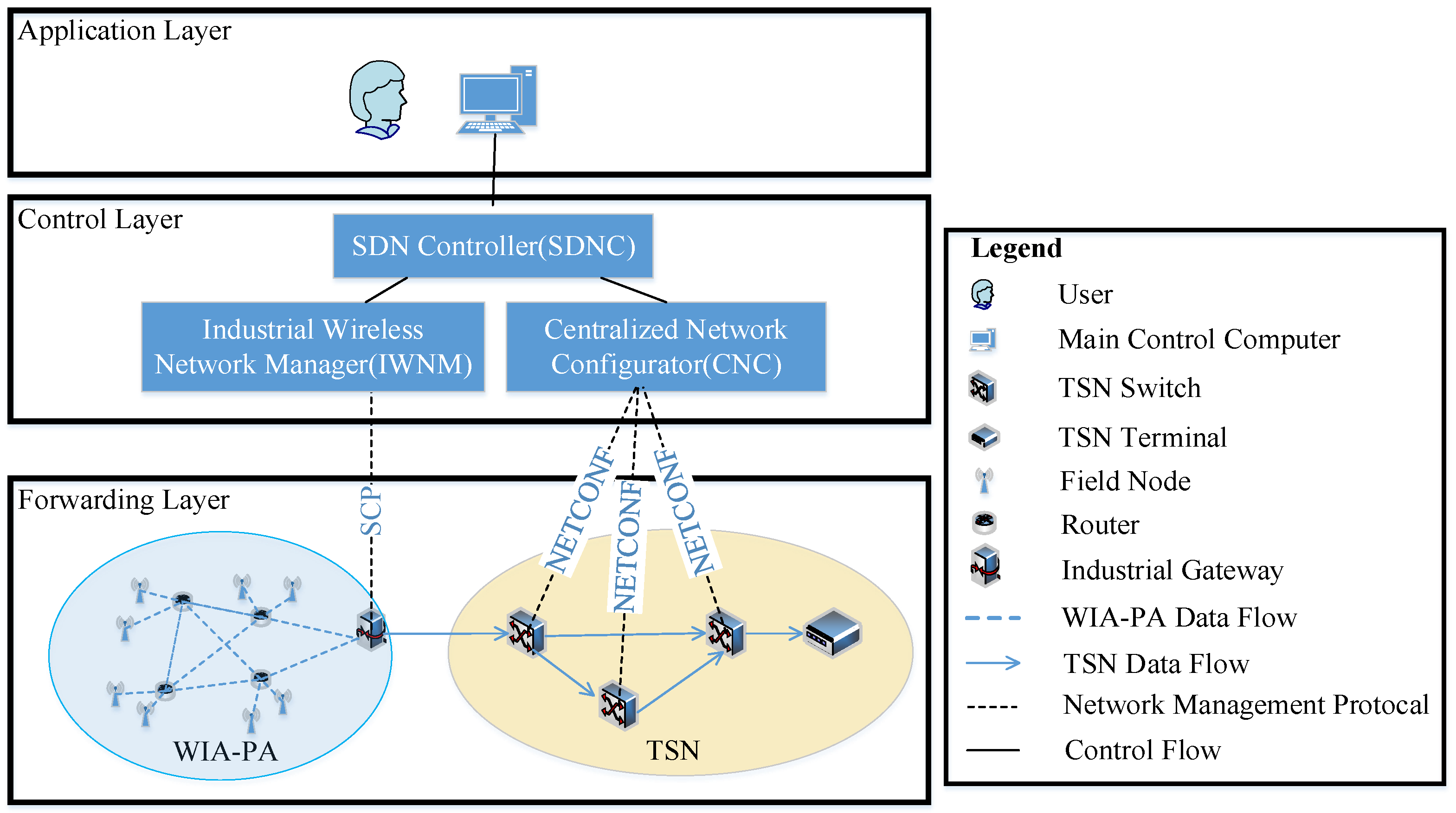
The transmission of converged network dataflows on the TSN side can be scheduled and configured by the CNC [
17]. Based on the network topology information on the TSN side and the information on the dataflows to be scheduled, the CNC calculates the gate control list (GCL) [
18] and subsequently configures it to the corresponding switch device.
The gating line of the switch output port periodically switches the gate according to the GCL scheduling scheme to ensure that each dataflow is transmitted in the appropriate time slot in the gating cycle period [
19].
In the TSN switch, each outgoing port is designed with eight priority queues [
20], corresponding to eight priorities, from 0 to 7, which are employed to transmit dataflows of corresponding priorities, among which priority 0 is the lowest and priority 7 the highest [
21]. The TSN dataflow enters the corresponding priority queue for buffering according to the premarked priority label. When the TAS gate is opened, the data frame in the corresponding queue can be outputted [
22].
A specific working example of priority filtering is shown in
Figure 3. The dataflow mixed with different dataflows of different priorities originates from the ingress port, passes through the switching fabric and faces eight queues. Every queue is controlled by its gate. In
Figure 3, only the queue of priority 7 is opened, whereas the other queues are closed. Thus, the dataflows of other priorities are blocked inside their queues and only the dataflow of priority 7 can come out from its queue and transmit toward the egress port.
The frame transmission window arrangement scheme for each dataflow at the output port of the TSN switch actually allocates an appropriate number of transmission time slots for the frame transmission window of each dataflow. The CNC calculates the frame transmission window scheduling scheme of each dataflow that meets the QoS [
23] requirements by the scheduling algorithm and subsequently sends the calculated scheduling scheme to the TSN switch for configuration [
24].
According to the characteristic information of multiple dataflows to be transmitted, the GTSA scheduling algorithm in this study schedules each data frame of different priority dataflows to be transmitted to the link in a relatively appropriate time window within the scheduling period (). The purpose of optimizing the transmission jitter of each dataflow is achieved using this method.
In the scheduling algorithm on the TSN side, the CNC calculates the TSN scheduling cycle based on the transmission cycle of all dataflows to be scheduled. Thereafter, the transmission of each TSN dataflow commences at a fixed time within each scheduling cycle. Assuming that the start time of the first scheduling cycle is 0 µs, then the end time of the current scheduling cycle is the start time of the next scheduling cycle [
25]. Since the data link layer fragments the IP datagrams [
26] into frames and subsequently transmits them [
27], this study refers to the scheduling of TSN dataflows at the link layer as frame transmission scheduling.
A schematic of the frame transmission scheduling is shown in
Figure 4. In one scheduling period, the TSN dataflow (
) has four frames (
,
,
,
) to be transmitted. In the scheduling period, the TAS gates (7, 6, 5) corresponding to different TSN dataflows (
,
,
) are combined into the final TAS gate scheduling result. Thereafter, the frame transmission of different TSN dataflows (
,
,
) is combined into the final frame transmission scheduling result. In
Figure 4, the color green, orange and blue respectively represent dataflow with priorities 7, priorities 6 and priorities 5. Lines of different colors represent the states of different TAS gates for different dataflow. High lines represent that the gate is on, low lines represent that the gate is off.
The algorithm proposed in this paper is utilized to find the available frame transmission scheduling scheme. According to the available frame transmission scheduling scheme, the CNC generates a gating schedule and sends it to the switch.
3.2.2. Steps of the Dataflow Scheduling Method in TSN
The scheduling method in the TSN operates based on the technology of the frame transmission scheduling mechanism. There are 10 steps in this method, starting from step 1 and ending in step 10; all the steps are introduced here.
According to of , dataflows are sorted by the CNC, after which is obtained. consists of all the dataflows that need to be scheduled.
With
input,
,
,
,
and
are computed according to (1), (2), (3), (4) and (5), respectively. Symbol
represents the calculation of the least common multiple.
All data frames to be transmitted in the scheduling period of each
are sorted by the CNC according to their frame transmission sequences (
) defined in (6):
All time slots to be allocated in are initialized to idle state by the CNC and are numbered in order of time.
For each
in
, the time slots required for
data frame transmission windows need to be arranged within
. The time interval between adjacent data frames should be equal to
. According to (7),
of
is calculated using the CNC:
Among the unoccupied idle time slots, the time slots required by frame transmission windows that satisfy the following two conditions are searched. If the time slots that meet the requirement are searched successfully, step 7 is implemented, otherwise, step 9 is implemented.
Condition 1: each frame transmission window needs to be allocated with consecutive idle time slots.
Condition 2: the time interval between the adjacent frame transmission windows of is equal to of .
When the time slot satisfying two conditions of the jth frame transmission window of is found in step 6, step 7 is performed. Among the time slots satisfying the above two conditions, the time slot with the smallest number is allocated to the data frame transmission windows of and marked as occupied.
The jth frame transmission window of , which is marked as is saved by the CNC. Thereafter, step 10 is implemented.
When the time slot satisfying two conditions of the jth frame transmission window of is not found in step 6, step 9 is performed. The location time slots away from the start of the first frame transmission window are selected. The consecutive idle time slots in this location are allocated to . If there are no consecutive idle time slots at this location, they are searched for at the next location and allocated.
Return to step 5; the next dataflow will be scheduled until all dataflows have been allocated with time slots.
According to the execution results obtained in the above steps, the CNC calculates the scheduling sequence table of all dataflows in the converged network at the output port of the TSN switch and configures the scheduling table to the TSN switch. Thereafter, according to the scheduling table calculated by the above CNC, the gate control queue of the TSN switch periodically opens and closes the gate of the corresponding queue to ensure that the data frames in the queue can be transmitted in the scheduled sending window. In this way, the scheduling of the TSN part is completed.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}