
Intelligent Computing Methods for Contextual Driving in Smart Engineering Model Systems


1
Institute of Applied Mathematics, Doctoral School of Applied Informatics and Applied Mathematics, Óbuda University, H-1034 Budapest, Hungary
2
Antal Bejczy Center for Intelligent Robotics, Óbuda University, H-1034 Budapest, Hungary
*
Author to whom correspondence should be addressed.
Electronics 2022, 11(11), 1728; https://doi.org/10.3390/electronics11111728
Submission received: 30 March 2022
/
Revised: 23 May 2022
/
Accepted: 23 May 2022
/
Published: 30 May 2022
(This article belongs to the Special Issue Computational Cybernetics)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:An engineering model system (EMS) is a complex purposeful structure of representation and description type content that is developed during development and application; in other words, it represents the lifecycle of an industrial product. The essential improvements for systems operated that are autonomous, situation controlled, and include cyber physical features of products dramatically changed requirements relative to EMS. Engineering modeling platforms (EMPs) experienced major improvements to cope with new requirements by smart products. These improvements were related to system level representation, autonomous active model features, situation level reaction to changed contexts, system and physical level virtual execution, and the support of situation-level human intervention. The lifecycle support of smart product engineering requires EMS, which behaves as a digital twin of a physically existing products and has an active connection with its contextual world, particularly with cyber units of the cyber physical system that it represents. The work in this paper aimed to develop new methods that can be implemented in EMS under developments in EMP. This is a new area of research that is motivated and at the same time enforced by moving engineering activities into highly integrated and automated complex model spaces. This paper focuses on context driving and the autonomous features of EMS as well as utilization-organized intellectual-property-powered intelligent computing relative to the definition and application of contextually connected object parameters in EMS. It introduces several latest results by the authors as a contribution for EMS to cope with the new requirements. These contributions include a new scenario called the lifecycle representation of contexts (LRC) to enhance integration in EMS, handling contexts in contextually connected autonomous unit (CCAU), organizing the intelligent content of EMS in proposed level-sublevel structure of LRC, and examining findings about situation-level cooperation between human and autonomous process.
1. Introduction
High level automation, system-based situation control, autonomous operation, and engineering modeling platform (EMP) established a new era of engineering for increasingly smart industrial products. Engineering activities contribute to a highly integrated and automated engineering model system (EMS) [1], which represents and comprises research-, development-, production-, and application-related results of continuous engineering [2] during the lifecycle of an industrial product. Problems in this new engineering practice enforced major developments in reusable experience, system-and physical-level model representation, and solutions for cyber-physical system (CPS). To encourage global participation and worldwide accessibility relative to engineering projects, cloud-organized EMP replaces the premise-installed one. Cloud-organized EMP offers high level and flexible configuration capabilities for project, collaborative space, member role, and comprehensive multidisciplinary modeling [3].
Situation-controlled and situation-aware smart systems [4] in industrial products enforced advancements of EMS toward a capability to recognize a particular situation, to make situation-based autonomous decision on physical actions, and control physical actions in real time. By now, advanced EMS is in possession of autonomous and self-modification features that are capable of quick and active reactions relative to changed contexts from the outside world, especially from cyber units of smart CPS. Sometimes, EMS is called a digital twin [5] of the represented industrial product. Smart CPS is characterized in [6]. Autonomous processes in EMS proceed along chains of context definitions between related object parameters, while context definitions are empowered by intellectual property (IP) [6]. IP can be accumulated for decades in EMS using intelligent computing-assisted knowledge ware [7] at companies and institutions. EMS procedures can access IP items within the platform or from outside organization. By now, intelligent computing is widely applied methodology for the definition, generation, and application of IP [8]. Complex and widely contextual EMS representations changed requirements against intelligent computing procedures that typically perform well as solutions for local problems considering a few contexts, and it fails when the scope of contexts is widened. Smart EMS is highly based on intelligent computing content, and EMS processes are powered by IP to reuse accumulated and continuously refined theoretical-practical knowledge in EMS over a period of time.
The recently founded Virtual Research Laboratory (VRL), Óbuda University, Budapest, Hungary, is active in fundamental, engineering problem solving and smart product related research for enhanced EMS. Cloud configured EMP provides organization and environments for a research laboratory that is similar to laboratories used in leading industries. Deep theories and real-world practice can be represented in the same experimental EMS. VRL applies 3DEXPERIENCE on the Cloud platform by the Dassault Systémes S. A. [9] as EMP. The server side of this platform is provided by our own VRL platform in the cloud operated by Dassult Systémes S. A.
This paper is organized as follows. Section 2 introduces new scenario called as lifecycle representation of contexts (LRCs) to enhance active context driven integration in EMS. Section 3 discusses methods in handling contexts in contextually connected autonomous unit (CCAU). Section 4 introduces and discusses a proposed level–sublevel structure of LRC as means to organize intelligent content of EMS. Finally, Section 5 explains some findings about situation-level cooperation between human and autonomous process.
2. New Scenario of Contexts
The consistent structure of context definitions is essential at driving object parameters in active and autonomous EMS and at driving connections of EMS with cyber unit object parameters in autonomous CPS. Driving is an automatically activated relationship between relevant contextually connected parameters of relevant objects. The direction of contextual driving between related parameters may be one- or two-way. Consequently, a change in contextual connections may just be a change of its driving direction. The structure of contextual connections in EMS is defined along chains and refined during the integrated innovation and life cycle of a product.
To achieve better organized structure of context definitions in order to produce consistent structures relative to contexts easier in EMS, a new scenario called LRC is introduced below. LRC is proposed by considering tendencies toward situation-driven autonomous industrial products and extensive applications of intelligent computing in autonomous EMS. LRC is based on formerly published organized context structures [10].
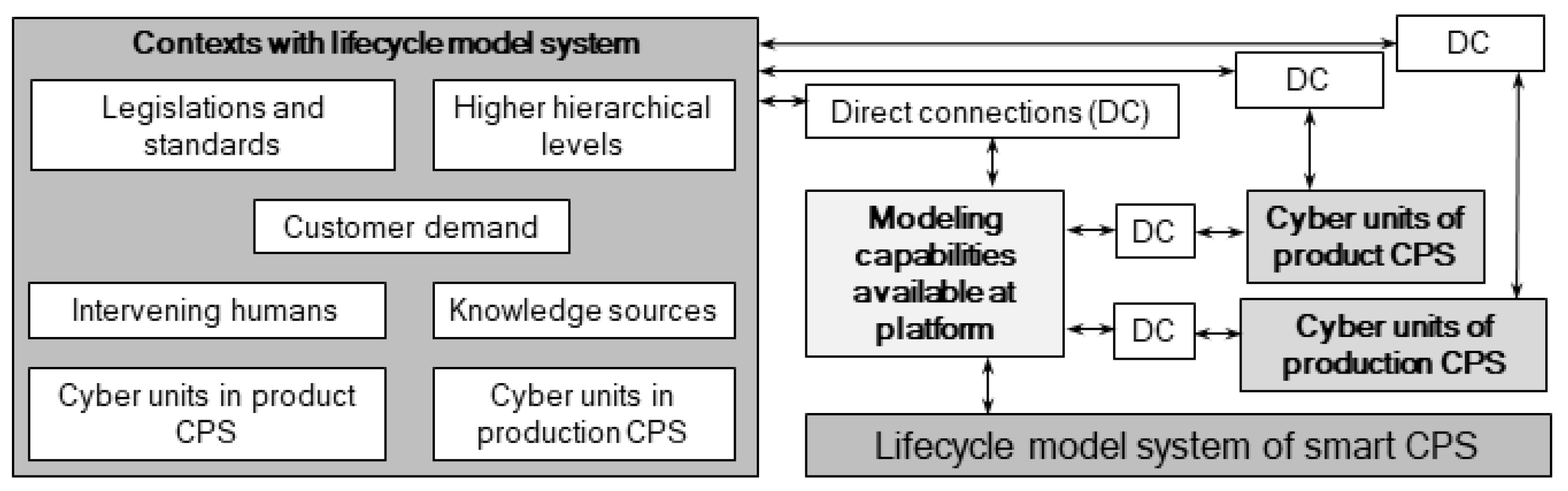
The above-mentioned scenario is outlined in Figure 1. The world outside of the scope of model-based engineering for which an EMS is developed generates contextual connections with the lifecycle model system (EMS). At the same time, EMS establishes contextual connections with outside sources. The scope is always a decision made by the relevant company or institution and often changes during the lifecycle of the actual represented industrial product.
The actual scope of engineering modeling (ASEM) includes units and components in an actual scenario for engineering activities. It is obvious that ASAM is important parameter of LRC. Figure 1 shows the most important groups of outside contexts for current engineering practices. A group is organized for a well-defined purpose often at a responsible organization. Each group needs distinct handling in EMS. Legislations and standards are proposed in the same group for practical reasons. The standard is increasingly effective only within a company and in cooperation between companies. Higher hierarchical levels provide decisions as mandatory contexts for engineering modeling while simultaneously being effective. Customer demand is provided by marketing and can forecast company activities. Intervening human activities communicate contributions with EMS and provide commands for CPS in accordance with roles and duties using personal capabilities including intuition. An intervening human inherently acts as a knowledge source, and methods for explaining knowledge or connecting sources at any contribution are anticipated. Main knowledge sources include outside IP items, expert representations, and formerly decided or generated solutions. In this scenario, the industrial product and the associated production system are supposed to behave as CPS. Outside contexts are in direct connection (DC) with procedures provided by the capabilities of EMP and cyber units of CPS. It must be noted that EMP capabilities make the definition of arbitrary indirect contextual connection between any related object parameters possible, with the exception that it breaks direct connections or other higher-level contexts.
A consistent structure for outside and inside contextual connections has become the glue in EMS control, change management, and autonomous behavior. It provides great assistance for the emerging methodology of continuous engineering (CE) relative to analyzing the consequences of modifications in EMS or EMP software. In addition to the execution of existing context driving, LRC represents content for the generation of new driving contexts [11]. In this way, driving contextual connection is often generated and activated automatically using approved knowledge content in EMS.
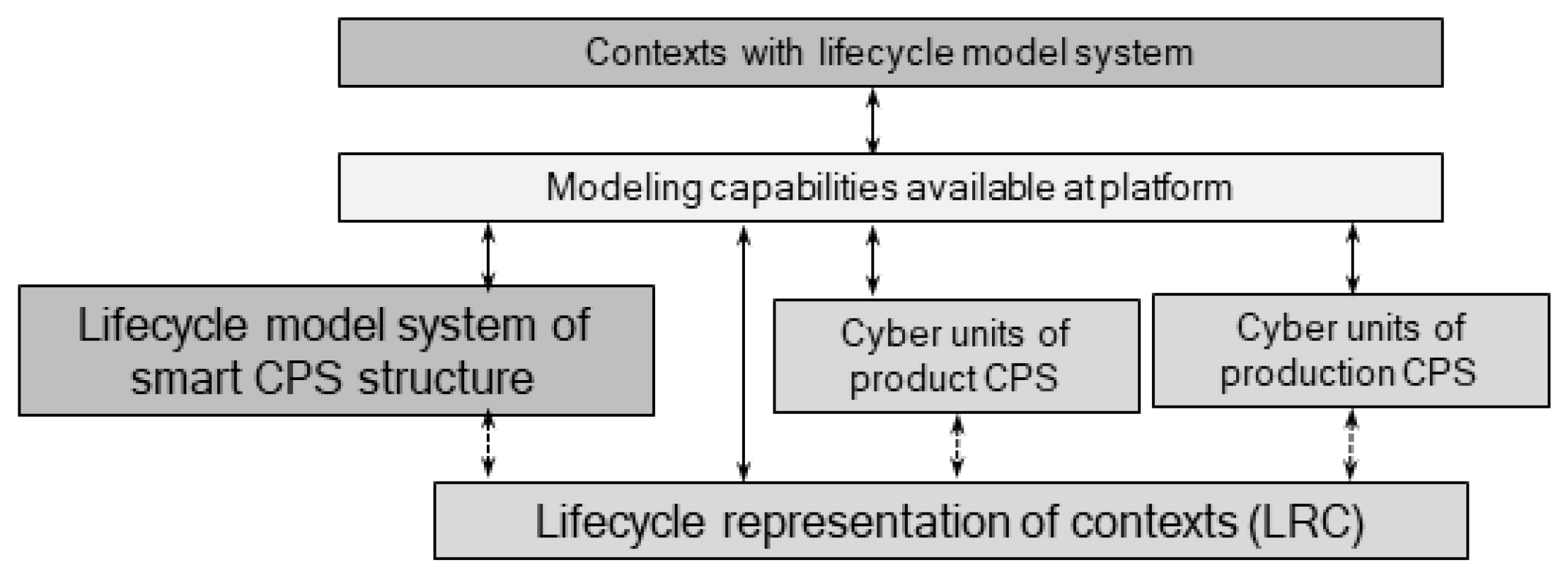
LRC is devoted as a separated but contextually connected unit in EMS (Figure 2). LRC is detailed in Section 4 of this paper. Figure 2 shows that one of the purposes of LRC is to provide two-way contextual connections with CPS cyber units. Dashed lines show a logical connection, while all model entities are handled by modeling procedures in the modeling capabilities of the EMP in which EMS is managed.
3. Contextually Connected Autonomous Units
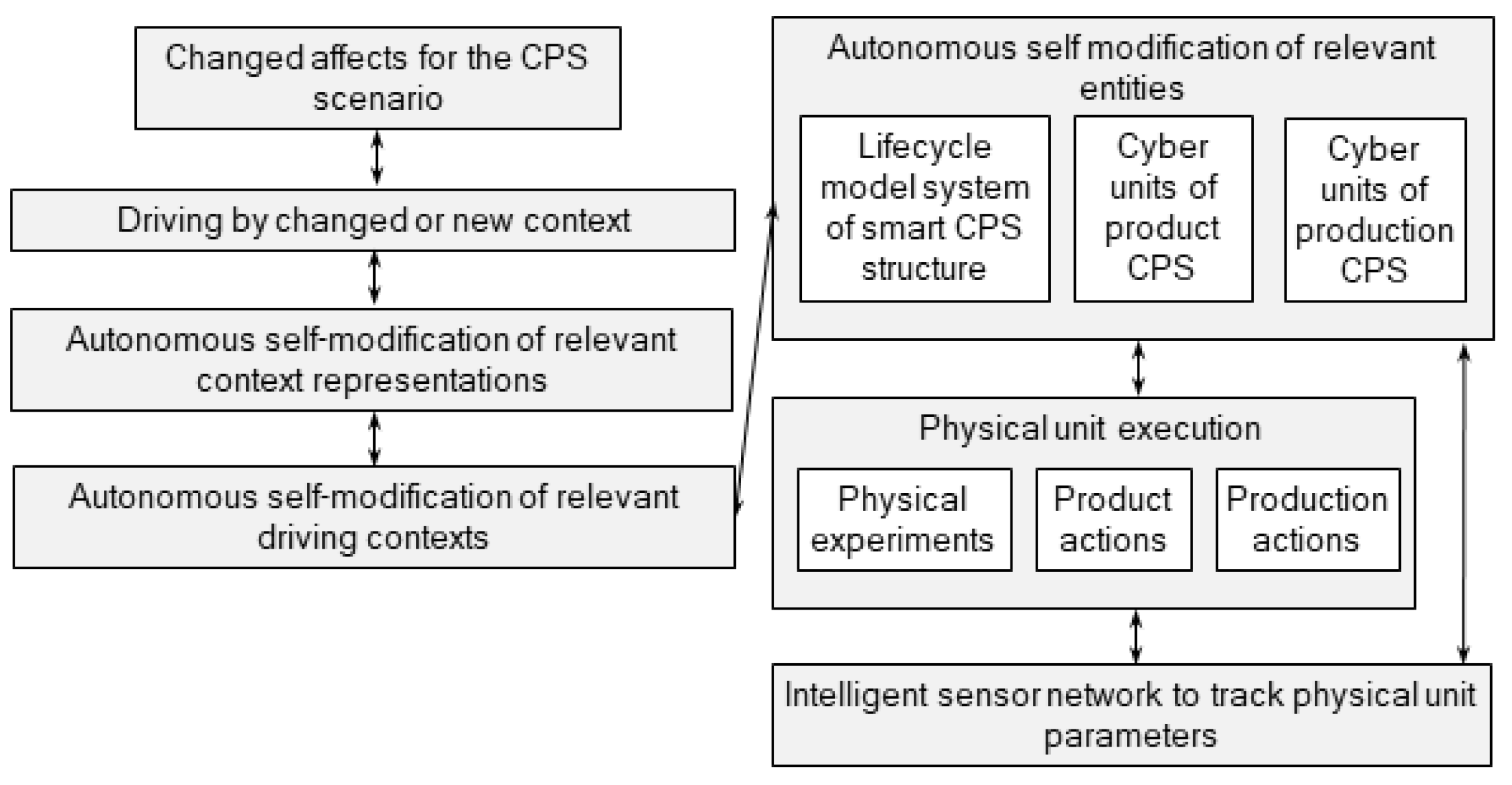
A situation-awareness-driven autonomous smart product includes autonomous and non-autonomous units. The development of EMS structure must follow this new structure of industrial products. A new issue of contextual connection within and between autonomous units has emerged. for the methods for obtaining the results in this paper included integrated CPS engineering scenarios, which comprise autonomous units of smart CPS structure, cyber units of product CPS, and cyber units of production CPS (Figure 3). Contextually connected autonomous units cooperate in the recognition situations, which acts as the driving context for decisions related to physical execution in the physical units of CPS.
Smart product and smart engineering presume ASEM for purposefully configured CPS scenarios, which sometimes constitute an integrated system of systems (SOS). The world outside of CPS scenario has well-defined effects on it (Figure 3). An effect is an influence and is represented by suitable driving contexts. In this stage, driving is still an attempt because dedicated procedures in CPS scenario will decide on its activation by considering the consequences inflicted on the affected objects in the CPS scenario. Any changed effect for the CPS scenario initiates autonomous self-modification of the relevant context representations by generating relevant driving contexts. Any modified driving context activates the autonomous self-modification of the relevant entities in EMS of the actual smart CPS structure, in cyber units of product CPS, and in cyber units of production CPS. Relevant driving contexts are activated along their chains. As a result of the above process, the relevant model entities autonomously activate organized simulations and virtual experiments in EMS and CPS. Virtually executed system level representations [12] and multiphysics analyses in simulations are assumed [3]. In this way, the cyber units of CPS systems receive driving contexts and activate the physical unit execution for physical experiments, product actions, or production actions. Intelligent sensor networks serve tracking-selected physical unit parameters and provide actual real-world information not only for the cyber units but also for the EMS of smart CPS structure. Any feedback is configured as the driving context. It is inevitable that the above process requires high level automation for its support using new and integrated approaches to engineering. The authors think that this is one of the issues that will have key role in future engineering applications for smart industrial products.
4. Organizing Intelligent Content in LRC
The necessity of lifecycle-organized content for establishing a consistent structure of contexts in EMS was recognized in our research around 2005 when system-operated products started to have widespread application in leading industries. Concepts such as multilevel abstraction and virtual engineering space (VES) [6] were developed to support our research in lifecycle-organized content. During the past 15 years, several structures relative to organized driving contexts were published specifically for the lifecycle EMS of system-level engineered products and CPS-based industrial and commercial products. These structures were developed in accordance with actual paradigm shifts and new trends in industries.
Novel active intelligent support is a key issue in definition, management, and active operation of EMS for autonomous CPS, especially when situational awareness is included. This also requires a modified approach to intelligent computing. One of the objectives for the development of concept and structure of LRC was the representation of intelligent content using appropriately configured theories, methods, procedures, algorithms, mathematical solutions, and system representations. In this way, LRC was conceptualized to collect and relate relevant and situation-accepted content items for contexts. The representations of these items in LRC provide considerations, research findings, methodologies, experience, expertise, and intuition. It can be concluded that LRC serves the CPS-specific integration of relevant intellectual property (IP). The area of solutions covered by EMS and EMP increasingly will include bioinspired engineering in the future [13]. Finally, developments in software engineering have key roles in advances in this area [14].
LRC is multilevel structure with sublevels or, in other words, substructures on its levels. It follows modeling methodology, which is applied at the requirement, functional, logical, and physical (RFLP) structure, which is common in current system-eligible EMSs [15]. The RFLP structure is one of the foundations in systems engineering (SE) [16] and includes core elements from the Standard for Application and Management of the SE (IEEE 1220). RFLP-structured models in EMS implementations apply structures comprising port-connected blocks. RFLP-structured EMS includes functional and logical level product component structures as system representations. A system-level model can be virtually executed when behavior representations are embedded in the system-level components of the represented industrial product.
As it is obvious from the above, driving-content representations are required for the purpose of providing contributions, behaviors, systems, situations, interventions, and physical unit control. The levels of LRC were defined in accordance with this requirement. Contributions are proposed by the world outside of EMS and CPS. Behaviors are expected and specified by contributions. Systems are configured to operate industrial products. The representation of content for system-related driving contexts is especially important in LRC because RFLP structure is an inherently implicit representation of systems. Representing content for driving situational awareness-related EMS entities is a new attempt used in LRC. Situation-eligible EMS is very new and still troublesome even for leading industries. The level Intervention in LRC refers to content that is applied at driving by human intervention to correct automatically recognized situations. The new task here is to handle confrontations between model (machine)-recognized situations and humans [16]. Finally, the organized content for the control of physical units is a reassessment of the conventionally applied approach.
As it was explained above, LRC collects and organizes content items to generate driving contexts. A driving context is active when the relevant contextual connection has an activated status in EMS between an object parameter in LRC and a relevant parameter of RFLP structure or CPS cyber unit. The LRC substructure is a structure of elements where any element includes content for the generation of a well-defined driving context. Beyond driving, elements within sublevels on the same level or on different levels can be connected without driving when a target element is independent of an actual element. This is necessary for providing flexible definitions of entities in EMS. When multiple parameters are connected from one or another side, with or without condition rules, the coordination of driving effects is included before the generation of relevant driving contexts. This is the value of LRC when various content entities require different decisions or opinions about them. This situation is controlled by including condition entities. Autonomous EMS generates messages by asking for human assistance or even stopping a process. This is advised in order to avoid the prior proper preparation of active knowledge.
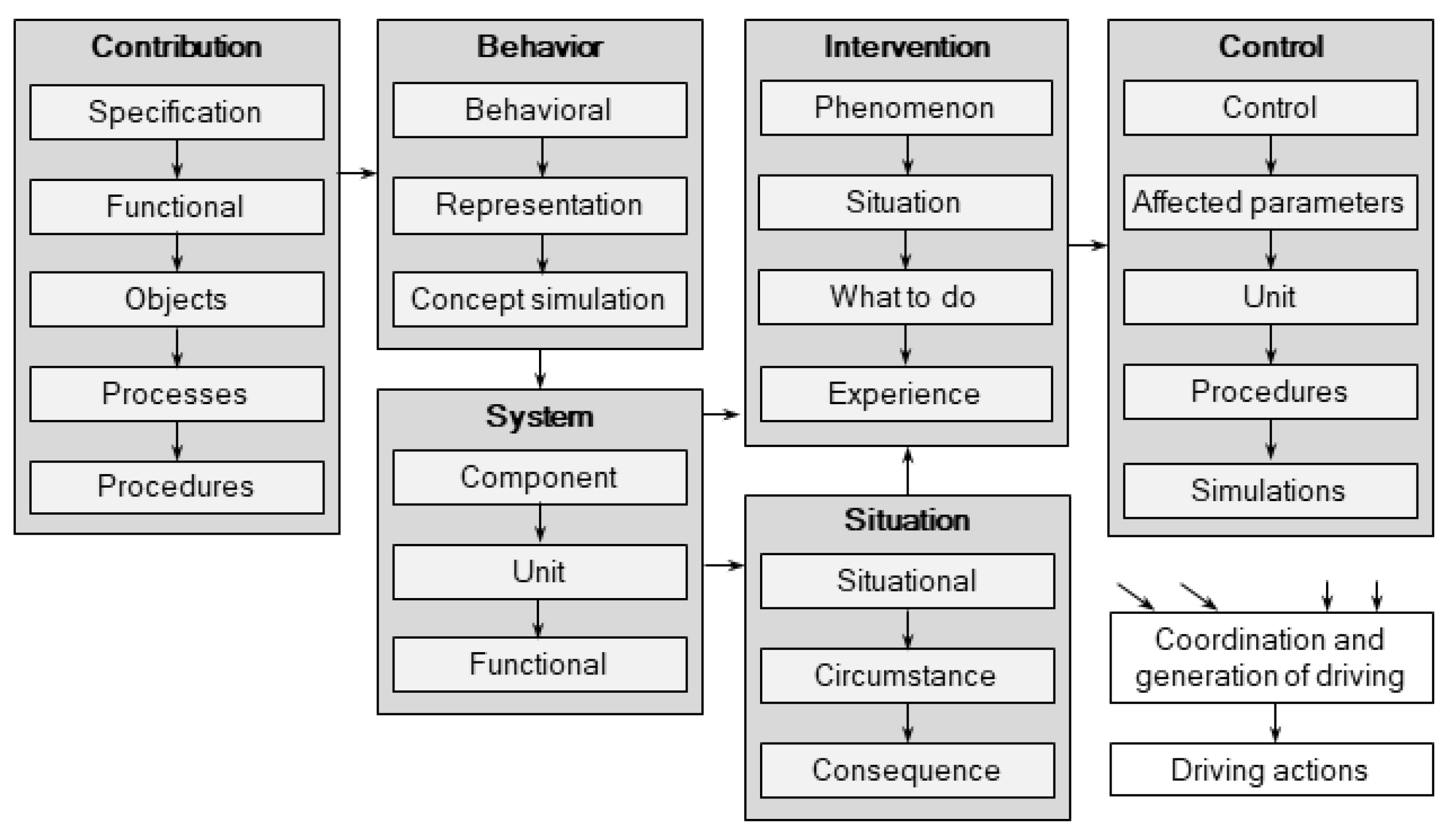
The proposed level–sublevel structure of LRC can be observed in Figure 4. On the contribution level, accepted outside contexts are organized on five contextual sublevel structures. The specification sublevel includes connected and related requirements against the product. The functional sublevel represents functions that are required by outside contexts in the context of specifications. Objects cover ones that are requested for functions. Processes are related to object structures, while procedures are defined for object parameters.
The behavior level includes three sublevel structures for behavioral definitions that serve as contexts for behavior representation and the simulation of concepts in the context of behavior representation. In RFLP-structured EMSs, behaviors are defined for the functional and logical level components of the industrial product. Although the purpose of the behavior level is producing driving contexts for these levels, appropriately defined and represented behaviors can also drive other entities in EMS or cyber units. Multiple driving by a behavior item helps organize and unify knowledge and decision structure in EMS.
The system level of LRC is included to drive implicit system representations in RFLP structure by providing content for the explicit structure of systems. A component system consists of units, while a unit is used for a single or grouped function. Although function here is often different from the required function on the contribution level, it must fulfill requests by providing contributions.
The purpose of the situation level is to collect and organize content to drive parameters in situation-related objects in the RFLP-structured EMS and cyber units of the involved CPSs. The aim is to enhance decisions that require situational awareness by applying reusable content from the past for situation definitions, sets of circumstances in the context of situation, and experienced consequences in the context of relevant circumstances.
In a situation-controlled autonomous system, human intervention is performed on the situation level, requiring personal situation awareness to realize successful proactive control or the emergency correction of automatically recognized situations. The intervention level includes four contextual sublevels to support object driving in this area by applying the structure of phenomenon, structure of situations in phenomenon context, and the necessary human activities (what to do) in cases of a situation. This situation is not necessarily the same as in case of the situation level. Content here represents a case at which the consideration of proactive control or emergency correction is necessary. Finally, experience is the contextual structure of content elements that supports intervention by experience from the past. An appropriately integrated representation of experience is one of the most common issues for leading EMS technology.
The last level in the proposed LRC structure supports definitions in EMS and activities in the cyber units of CPS and includes physical unit control-related object parameter drives. In EMS, this is included among others for the support definition and execution of realistic simulation structures. The control level of LRC consists of five contextual substructures (sublevels), as shown in Figure 4. Sublevel control is a structure of control processes content that is included. The next sublevel identifies and relates the affected parameters for each control process. The control of any other parameter is prohibited except for the previous extension of the content on this sublevel. Unit is a structure of physical control units and their virtual counterparts. A current industrial practice-related example is the representation of a robot control unit in EMS. Procedures and simulations include content in the context of the unit and possess relevance with CPS practice.
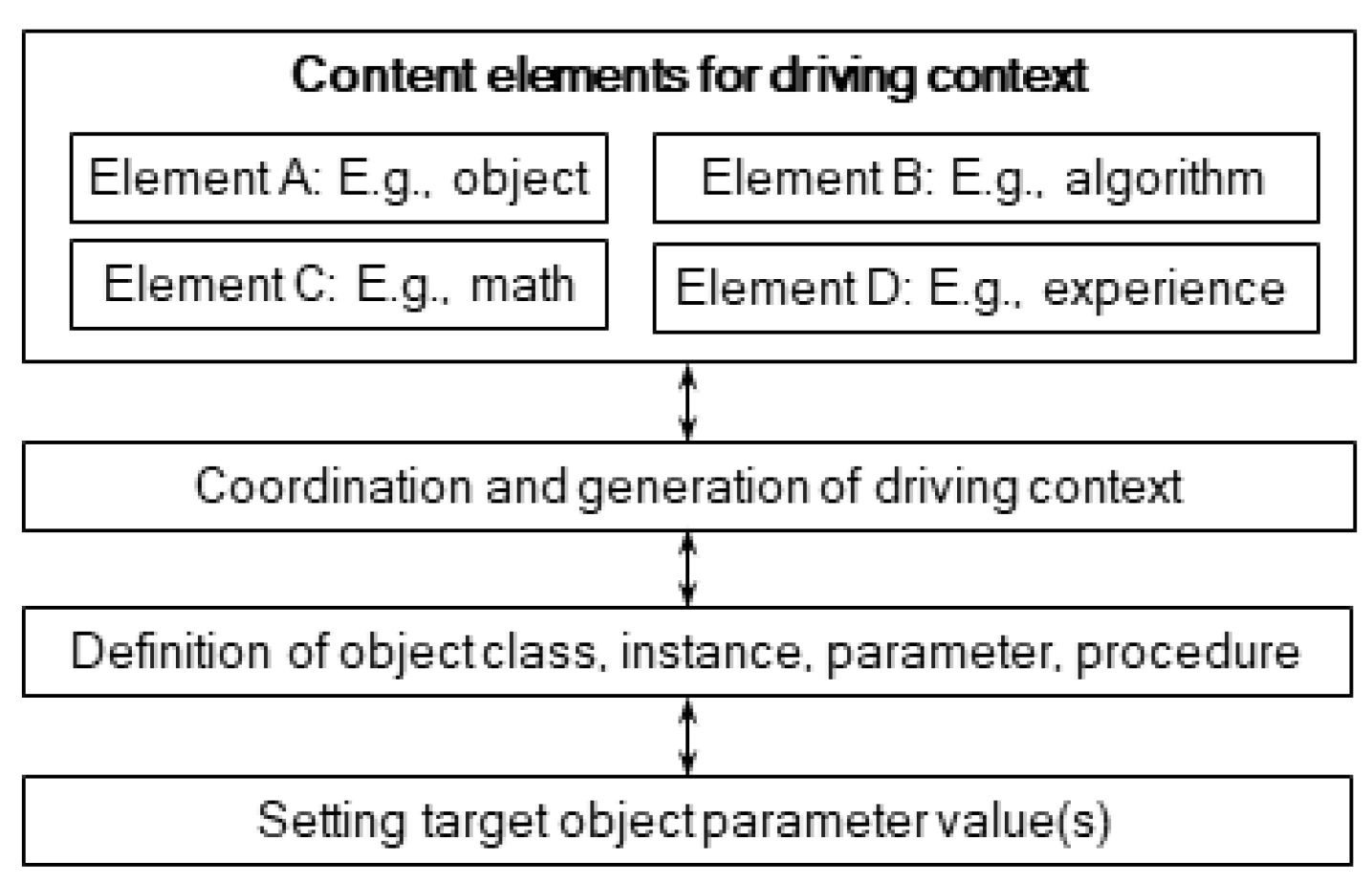
While the lifecycle representation of contexts (LRC) is summarized in Figure 5, Figure 4 introduces the levels and sublevels in LRC. A driving context often is very complex and includes elements such as object, algorithm, mathematical solution, and experience representation. Elements are coordinated, and context is generated in accordance with actual relevant target parameters. Sometimes, the choice of objects must be completed by new ones. Any new object must be announced in the engineering modeling platform by its class, place in taxonomy, parameters, and procedures. Target parameter values are set in new or existing object instances. Because object classes cover wide areas in EMP, the normal task is providing a definition of their instances.
5. Cooperation between Human and Autonomous Process
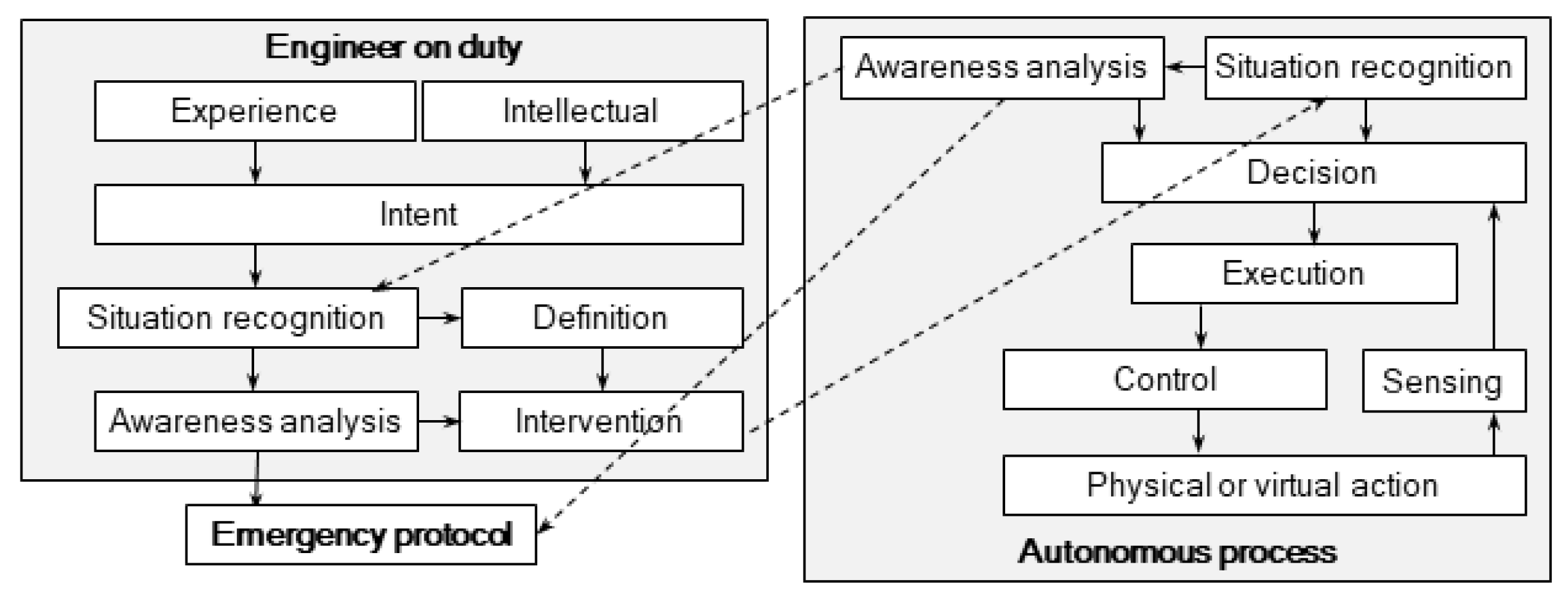
This issue is still developing and is anticipated as one of the main subjects in LRC-related future research at VRL [17]. Some characteristics of this cooperation process is explained and discussed above in this paper. The scenario of cooperation is summarized in Figure 6. The engineer on duty and relevant autonomous process are participants of this communication [18]. In the meantime, emergency protocols are generated to assist cooperation and to document the situation and how it is handled.
On the human side, experience and personal intellectual capability assist in developing intent and situation recognition at human levels. Intervention is based on appropriate definitions. Simultaneously, awareness analysis verifies human activity in order to avoid mistakes and to handle emergency protocols when mistakes are obvious.
On the autonomous process side, situation recognition drives decisions, which initiates the execution of relevant physical activities in CPS. Awareness analysis checks for obvious mistakes. This process is supported by driving content from LRC. In the meantime, sensing the means of physical parameters sends real-time information about the actual parameters in the relevant physical unit of CPS. This feedback is utilized in real time when decision functionality is in the possession of proper active intelligence. The contextual connection of this autonomous process with human and EMS will be the issue of future research at VRL.
6. Conclusions
The main contribution in this paper is a novel LRC structure that is proposed as an integrated sector in EMS for enhancing system composition, behavior definition, and situation awareness capabilities in cooperation with the cyber units of CPS. Intelligent computing methodology is widely applied at the definition level and for structuring contextual connections. Other contributions in this paper include new scenario definitions for autonomous engineering model systems, the definition of contexts that are suitable to connect models of autonomous units in the new scenario, placing intelligence in smart systems purposed for driving contexts, and the cooperation of responsible human with autonomous process. Former context-related results are transformed into the new scenario by considering leading industrial engineering technology.
The definitions and applications of active driving content in the proposed LRC comprise very complex and continuous tasks during integrated innovation and the life cycle of the industrial product, which is represented in EMS. The dynamical development of intelligence capabilities in EMS requires the utilization of the latest achievements in intelligent computing; high-level object modeling; the representation of engineering concepts, objects, and processes; and the high-level consideration of active knowledge. These are necessary to render EMS eligible for accommodation developing strategies in autonomous industrial product engineering.
Author Contributions
Conceptualization, L.H. and I.J.R.; Contexts, L.H. and I.J.R.; Methodology, L.H. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Acknowledgments
The authors gratefully acknowledge the financial support provided by the Óbuda University and the Doctoral School of Applied Informatics and Applied Mathematics.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Horváth, L.; Rudas, I.J. New Approach to Multidisciplinary Content Driving of Engineering Model System Component Generation. In New Trends in Software Methodologies, Tools and Techniques; IOS Press: Amsterdam, The Netherlands, 2016; pp. 38–49. [Google Scholar]
- Kang, L.; Zong, W.G. A new meta-heuristic algorithm for continuous engineering optimization: Harmony search theory and practice. Comput. Methods Appl. Mech. Eng. 2005, 194, 3902–3933. [Google Scholar]
- Blades, L.; Miskovish, R.S.; Luke, E.A.; Collins, E.M.; Kurkchubashe, A.G. A Multiphysics Simulation Capability using the SIMULIA Co-Simulation Engine. In Proceedings of the 20th AIAA Computational Fluid Dynamics Conference, Honolulu, Hawaii, 27–30 June 2011; pp. 1–16. [Google Scholar]
- Endsley, M.R. Situation Awareness in Future Autonomous Vehicles: Beware of the Unexpected. In Proceedings of the 20th Congress of the International Ergonomics Association, Florence, Italy, 26–30 August 2018; pp. 303–309. [Google Scholar]
- Lim, K.Y.H.; Zheng, P.; Chen, C.-H. A state-of-the-art survey of Digital Twin: Techniques, engineering product lifecycle management and business innovation perspectives. J. Intell. Manuf. 2020, 31, 1313–1337. [Google Scholar] [CrossRef]
- Abramovici, M.; Göbel, J.C.; Neges, M. Smart Engineering as Enabler for the 4th Industrial Revolution. In Integrated Systems: Innovations and Applications; Springer: Berlin/Heidelberg, Germany, 2015; pp. 163–170. [Google Scholar]
- Horváth, L. Smart Engineering Modeling for Smart Industrial Products. Acta Polytech. Hung. 2019, 16, 11–30. [Google Scholar] [CrossRef]
- Brière-Côté, A.; Rivest, L.; Desrochers, A. Adaptive generic product structure modelling for design reuse in engineer-to-order products. Comput. Ind. 2010, 61, 53–65. [Google Scholar] [CrossRef]
- Gomez-Jauregui, V.; Cue-Palencia, F.; Manchado, C.; Otero, C. Education for the Industry of the Future (IoF) with the 3D Experience Platform. In Advances on Mechanics, Design Engineering and Manufacturing II; Springer: Berlin/Heidelberg, Germany, 2019; pp. 761–769. [Google Scholar]
- Horváth, L. Contextual Knowledge Content Driving for Model of Cyber Physical System. In Proceedings of the 15th International Conference on Control, Automation, Robotics and Vision, Marina Bay Sands Expo and Convention Centre, Singapore, 9–13 December 2018; pp. 1845–1850. [Google Scholar]
- Canedo, A.; Schwarzenbach, E.; Faruque, E. Context-sensitive synthesis of executable functional models of cyber-physical systems. In Proceedings of the 2013 ACM/IEEE International Conference on Cyber-Physical Systems (ICCPS), Philadelphia, PA, USA, 8–11 April 2013; pp. 99–108. [Google Scholar]
- Kleiner, S.; Kramer, C. Model Based Design with Systems Engineering Based on RFLP Using V6, in book Smart Product Engineering; Springer: Berlin/Heidelberg, Germany, 2013; pp. 93–102. [Google Scholar]
- Lenau, T.A.; Metze, A.-L.; Hesselberg, T. Paradigms for biologically inspired design. In Proceedings of the SPIE Smart Structures and Materials+Nondestructive Evaluation and Health Monitoring, Denver, CO, USA, 4–8 March 2018. [Google Scholar]
- Bures, T.; Weyns, D.; Schmer, B.; Tovar, E.; Boden, E.; Gabor, T.; Tsigkanos, C. Software Engineering for Smart Cyber-Physical Systems: Challenges and Promising Solutions. SEN 2017, 42, 19–24. [Google Scholar] [CrossRef]
- Baughey, K. Functional and Logical Structures: A Systems Engineering Approach. SAE Int. 2011. [Google Scholar] [CrossRef]
- Malekia, E.; Belkadia, F.; Bernard, A. A Meta-model for Product-Service System based on Systems Engineering approach. In Proceedings of the 10th CIRP Conference on Industrial Product-Service Systems, Linköping, Sweden, 29–31 May 2018; pp. 39–44. [Google Scholar]
- McAree, O.; Aitken, J.M.; Veres, S.M. Towards Artificial Situation Awareness by Autonomous Vehicles; IFAC-PapersOnLine, Elsevier: Toulouse, France, 2017; Volume 50, No. 1; pp. 7038–7043. [Google Scholar]
- Chauvin, C.; Pokam, R.; Langlois, S. Designing Human-Machine Interface for Autonomous Vehicles; IFAC-PapersOnLine, Elsevier: Toulouse, France, 2016; Volume 49, No. 19; pp. 609–614. [Google Scholar]
Figure 1.
New scenario of related object connections by contexts.

Figure 2.
Location of LRC in EMS.

Figure 3.
Autonomous behavior of a smart engineering system.

Figure 4.
Levels and sublevels in LRC.

Figure 5.
Lifecycle representation of contexts (LRCs).

Figure 6.
Cooperation between human and autonomous processes.

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Horváth, L.; Rudas, I.J. Intelligent Computing Methods for Contextual Driving in Smart Engineering Model Systems. Electronics 2022, 11, 1728. https://doi.org/10.3390/electronics11111728
AMA Style
Horváth L, Rudas IJ. Intelligent Computing Methods for Contextual Driving in Smart Engineering Model Systems. Electronics. 2022; 11(11):1728. https://doi.org/10.3390/electronics11111728
Chicago/Turabian StyleHorváth, László, and Imre J. Rudas. 2022. "Intelligent Computing Methods for Contextual Driving in Smart Engineering Model Systems" Electronics 11, no. 11: 1728. https://doi.org/10.3390/electronics11111728
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.