
Towards Resilient UAV Swarms—A Breakdown of Resiliency Requirements in UAV Swarms


1
Conrad Blucher Institute for Surveying and Science, Texas A&M University-Corpus Christi, Corpus Christi, TX 78412, USA
2
Department of Computing Sciences, Texas A&M University-Corpus Christi, Corpus Christi, TX 78412, USA
*
Author to whom correspondence should be addressed.
Drones 2022, 6(11), 340; https://doi.org/10.3390/drones6110340
Submission received: 10 October 2022
/
Revised: 27 October 2022
/
Accepted: 1 November 2022
/
Published: 3 November 2022
(This article belongs to the Special Issue Intelligent Coordination of UAV Swarm Systems)
Abstract
:UAVs have rapidly become prevalent in applications related to surveillance, military operations, and disaster relief. Their low cost, operational flexibility, and unmanned capabilities make them ideal for accomplishing tasks in areas deemed dangerous for humans to enter. They can also accomplish previous high-cost and labor-intensive tasks, such as land surveying, in a faster and cheaper manner. Researchers studying UAV applications have realized that a swarm of UAVs working collaboratively on tasks can achieve better results. The dynamic work environment of UAVs makes controlling the vehicles a challenge. This is magnified by using multiple agents in a swarm. Resiliency is a broad concept that effectively defines how well a system handles disruptions in its normal functioning. The task of building resilient swarms has been attempted by researchers for the past decade. However, research on current trends shows gaps in swarm designs that make evaluating the resiliency of such swarms less than ideal. The authors believe that a complete well-defined system built from the ground up is the solution. This survey evaluates existing literature on resilient multi-UAV systems and lays down the groundwork for how best to develop a truly resilient system.
1. Introduction
Deploying multiple agents as part of a larger swarm has its advantages. Cooperative actions by several robots are a wide application domain [1]. Several possible advantages can be visualized particularly in the case of unmanned aerial vehicles (UAVs). A swarm of UAVs can search an area quicker than a single UAV making multiple passes over the same area. Higher-level approaches, such as search grid decomposition for individual agents, are more easily accomplished when multiple agents exist. Smaller size UAVs carry limited equipment to reduce equipment power consumption and reduce overall aircraft weight. It is possible to equip different agents in a swarm with different sensors. The result will be richer data streams that will be generated once the different sensor data is combined. Similar experiments can be envisioned where a swarm of UAV agents work at different altitudes in order to survey ground subjects, thereby providing multiple perspectives on the target. Such improvements in results by swarm agents are particularly useful considering the highly dynamic environments in which UAVs operate. Situations on the battlefield may already have changed by the time a single UAV makes a pass over the area and then moves on to cover other areas, and then returns. Similar effects are noticed while measuring large-scale phenomena such as red tide growth [2] or fish shoals [3]. Sensitive incidents such as a search-and-rescue (SAR) mission may require multiple agents to be deployed. An area may be too large for a single UAV to cover, and more agents improve the probability that a victim can be found quickly.
A multi-vehicle system can be described as effective, efficient, flexible, and exhibit higher tolerance to faults than a single agent [4]. This makes it more viable to have a swarm of UAVs attempt a particular task. However, the challenging environment they work in makes creating resilient UAV swarms a challenge. Successful UAV swarm implementations have demonstrated exceptional ability in performing tasks in various fields such as agriculture [5], natural resource surveying of water, soil, wildlife [6], search-and-rescue operations [7,8], and the military [9].
Unanticipated events such as inclement weather, intrusion from enemy agents, collision with foreign bodies or other swarm agents, loss of communication, or bugs in controlling schemes and software are just some of the events that may impede swarm function. Oftentimes, current multi-agent systems are interdependent to a high degree, making the loss of even a single agent disastrous for the swarm as a whole and its mission progress. However, failures can come in many different forms, both internal and external. Communication, Navigation, and Surveillance (CNS) failures [10] are categorized as internal failures, while weather and obstacles are external events. This study is part of an ongoing effort to improve resiliency in UAV swarms. To implement resiliency in swarms, we first need to conceptualize it into behavior responses that can then be implemented. Most modern systems exist and work in dynamic environments that are unpredictable in terms of their properties, composition, or behavior. Moreover, they have dependencies on input streams, power sources, and networks. Woods D.D in [11] perfectly condenses resilient behavior into four concepts.
- Resilience as a rebound
- Resilience as robustness
- Resilience as graceful extensibility
- Resilience as sustained adaptability
An UAV swarm is a perfect example of a cyber-physical system that works in areas that require it to exhibit resilient behavior. Networked, interdependent, and with limited capacity, UAV swarms are extremely susceptible to cascading system failures. It would be futile if an UAV swarm were to be brought down by the first disruption it faces. The remainder of the paper is arranged in the following manner. Subsections to this section discuss challenges faced while building resilient swarms and current research trends, Section 2 discusses every identified UAV swarm component as well as the various modules within them, Section 3 opens up directions for future research, while Section 4 presents conclusions based on the study and discussed statements. We define acronyms as they appear as well as provide a table of acronyms at the end of this article since some acronyms are repeated much later than their initial appearances.
1.1. Challenges to Building Resilient Swarms
UAV swarms have many challenges, such as the fact that the environment in which they operate is dynamic and unpredictable. During mission progress, external forces and internal incidents might affect critical hardware or software components of the swarm, leading to a reduction in performance, and perhaps an inability to perform a particular task such as record, fly, or navigate. Most application-specific swarm deployments require that the swarm be modified accordingly, and in situ adaptations are not uncommon [12]. Deploying and controlling even single UAV agent in the field has proven to be a challenge, and system complexity increases as the number of agents in the swarm increase. Mission needs might require specific sensors within the swarm but deploying such requirements to all agents in the swarm increases costs substantially. Madani in [13] describes resiliency engineering as the process of making a system capable enough to withstand disruptions. “Failure, in this context, is simply the absence of this ability, when needed” [13].
A halt in system function or a reduction in performance followed by the inability of the system to bounce back to the desired state is an indication of a non-resilient system [14,15,16]. Additionally, system intelligence must be capable of monitoring risk profiles for various components to actively avoid potential disruptions before they occur. In current UAV resiliency research, the authors have noted a stark lack of consideration of all UAV system components. Many publications mention this as beyond the scope of research, choosing instead to focus on one component. UAV swarms, on the other hand, require a ground-up integration of resilient behavior in all components to build a truly resilient system. The components here are defined as the many different areas of UAV operations. The authors here present a graphical visualization of these components in Section 1.3. Resilience is a multifaceted capability [15] and therefore cannot be summarized by modifying some aspects of system engineering while omitting the rest. We have observed that there are three major omissions in many existing resilience integration methodologies:
- All UAV components are not considered for resiliency incorporation
- All disruptions in their operational space are not considered.
- Resiliency concepts developed for individual agents are attempted to be scaled and applied to a swarm.
Existing research does not address comprehensive resiliency requirements, instead choosing to focus on a few modules. Simulations of such results might not fully consider the dynamics of additional disruptions affecting system states. Article [16] discusses resiliency situations wherein they highlight how hard-coded action-policy lists are often unsuitable for environments they are not designed for. MANET (Mobile Ad-Hoc Network) topologies in a survey conducted by them such as distributed optimization and relay chaining address network problems in a specific context only. Labeled as the ‘no-free lunch dilemma’ [17], this is described as how a method will often address a problem well but may fail in previously unencountered scenarios. Article [18] reviews the research by Macek et al. in [19] where solutions for robot navigation consider only single agents and their safety, but fail to address collision-free navigation for robot swarms. This is our main argument in resilient system design. Methods for individual agents may not scale well for multiagent systems (MAS). Critical flaws in system design are not addressed in simulation scenarios that measure system behavior. Article [20] describes their SHARKS protocol and states that its motivation is security and resiliency. However, agents that run the security protocol alone cannot be labeled resilient. Additional parameters should be conceived for the purpose. Article [21] designs a control and optimization strategy for SAR missions, but takes certain steps such as optimizing inputs onboard the UAVs rather than on-ground control to prevent communication issues. They state resilient network design to be beyond the scope of their study, and its application for the deployment of multi-agents in smart cities may have other disruptions that can cause a swarm to go down. A cyberattack or network jam is not the only cause for a swarm to cease function. Moreover, the SHARKS protocol describes only circling stationary targets, and thus generalized assumptions on target mobility cannot be made, since targets may have the ability to go mobile. Target tracking capabilities require extensive algorithms for path planning, and optimized resource allocation, accounting for the loss of communication capability while following targets in low signal strength areas. A change in control design is needed for collision avoidance during dynamic formation changes during target tracking and damaged agent recovery. It is difficult to realize the large-scale aerial performance of UAV swarms because this process involves complex multi-UAV recovery scheduling, path planning, rendezvous, and acquisition problems [22]. A survey conducted by [23] on routing protocols reports how most developments focus on performance and not security. Unsecure protocols and networks, however resilient to connectivity loss, are not an indication of a resilient swarm.
1.2. Analysis of Current Research Trends
To gain an understanding of the trends in current research, it was first necessary to construct a database of related studies. The two most popular research databases were used, Google Scholar and Scopus. IEEE and MDPI databases were also examined. However, since the results from both are indexed by Google Scholar, mentioning it gets precedence. While Google Scholar provides higher numbers for the i and h indices due to its wider reach and slightly different citation trawl method, Scopus is more ordered and allows better access to articles. The primary keywords used in the search process were UAV, RESILIENCY, and MAS. Keywords were used to search the title and abstracts of articles. A time constraint of the past 10 years (2011–2021) was applied to search for articles plus current work through June 2022. More than 1100 hits were generated on relevant research. These were manually filtered to remove duplicates and incorrect entries. Incorrect entries included resiliency recommendations for electric grids, outer space, and nonrelated cyber-physical systems. An analysis of the remaining 258 papers provided us with seven different sections that formed the UAV swarm components classified in Figure 1. All research was then categorized individually into these seven components with cross-links established for papers that had a combination of or covered multiple modules. The definition for combination modules was defined as research making progress in multiple subcategories, such as algorithms for heterogenous agents performing balanced path planning [24] or management architectures for drone service platforms that provide mission planning and resource handling for agents [25].
An analysis of the final data set provided the number of articles that covered each component for resiliency integration as a major part of their research proposal. Figure 1 shows the seven components and the number of research articles in each one.
Figure 2 shows the above research categorized by the number of components they each cover. More than 50% of the research examined covered just one component as its target for resiliency integration while excluding the others. Less than 15% of the research covered three components of the recognized components for UAV swarm operations for resiliency incorporation. Research work such as swarm management and control policies were excluded from this count as it did not directly relate to any unique component. Thus, an error of ±3% is assumed.
A generalized search using Dimensions.ai [26] for related research in the past decade shows an increased uptrend. Figure 3 shows the number of research articles excluding book chapters that were published each year on UAV swarm resiliency from the year 2011. While research on swarm resiliency is certainly on the rise, the work is primarily focused on certain components, while others are excluded or cited as beyond the research scope. This study examines the resilience of UAV swarms from a broader perspective and recognizes the need for system-wide integration of resilient characteristics in operations.
1.3. Scope and Contributions
This study examines UAV swarm resiliency research and creates a categorization of the various modules in swarm operations that require an integration of resiliency principles. The drawback of current resiliency research is that no single study addresses all types of factors that contribute to disruptions in UAV flights. An analysis of literature as shown in Section 1.2 supports author views. Existing research on UAV resiliency deals with some of the modules classified in this study. Other modules are recognized, but simply excluded for brevity, or recognized as beyond the scope of research. In this study, the authors have made efforts to identify every aspect of swarm operations and to categorize them. To our knowledge, this is among the very few studies that comprehensively address the resiliency issue by recognizing swarm components into modules and studying how resiliency features can be incorporated into them. Related existing research is discussed in detail. The state-of-the-art for all individual modules is discussed, and current challenges are highlighted.
Figure 4 categorizes UAV swarm operations into components and modules. The main components identified are Communication, Movement, SAR, Security, Resource and Task Handling, Agent Properties and Resilience Evaluation. Every component has subcategories (i.e., modules) that further extend operations. There is a recognized need for resilience engineering in all components and subcategories. Although it has been recognized that each module needs resilient incorporation, the module functions are interdependent. Failure of one can lead to a cascaded stop in operations. Every module is discussed as an important aspect of building resilience in UAVs. The major research in these modules is examined with their current implications and future possibilities. This study presents a classification-based review of resiliency research and lays the foundation for our current work on building comprehensive resilient swarms.
To create a novel study, we also examined recent surveys and discussions (2019–2022) on UAV swarms. This list provides an idea of areas where UAV swarm research has been well covered, and where research gaps remain. Table 1 below cites a list of review literature on UAV swarms that was examined. The research focus section provides a general trendline of study directions and indicates that a comprehensive study that provides an overview of all UAV swarm components and modules was thus far not carried out.
2. Resilient UAV Swarm Components and Modules
This section reviews previous literature on all of the recognized components and modules in Figure 4. A tabular summary of the discussions is also provided in Table 2 below.
2.1. Communication
The main modules of the communication component that need to be addressed are connectivity, network coverage, structure, and characteristics. Each is a vital part of the communication process required by agents in the swarm to maintain contact with the base and each other. Important functionalities such as data transfer and action control take place through the communication pipeline. Keeping complete communication is often the first step towards resilient systems. Communication issues include communication delays between swarm agents with one another or with external entities, such as ground control [40]. Swarm agents may fail to communicate with each other due to a variety of reasons. Some agents might stray out of the communication area as a result of path planning and navigational actions. In such cases, the swarm as a whole must be flexible enough to select the optimal agent deployment area by considering communication equipment limitations. Communication at some point might be disconnected completely. This can be due to failure of communication equipment or loss of critical swarm agents responsible for handling connections. Certain UAV task algorithms might overwhelm agent computational capacities to the point that they become unresponsive and reduce the system to a standstill. In-path obstacles might also result in a temporary loss of communication with the swarm. Ongoing research on communication such formation control using ad hoc networks [40] identifies issues and proposes solutions. If some agents in the swarm become disconnected, flexible formation control can restructure swarm positions to bring back agents within the connectivity sphere. Transmission delays can also be offset using formation switching to alternate topology to position swarm agents closer to broadcast handling agents. Passive beacons installed on the ground can help recover agents from failure by guiding them to failsafe points. Section 2.6 discusses the addition of heterogeneous agents in a swarm as a means of increasing operational resiliency. Ground vehicles can assist in providing emergency communication to aerial swarms and vice versa, as well as perform functions such as visual detection of navigation beacons to coordinate transmission to aerial swarms.
2.1.1. Connectivity
This section deals with maintaining connectivity between the swarm and communication systems at ground control, ground beacons, and the user. The communication path from ground control to UAV agents in operational space has numerous vulnerabilities. Swarms might go off course due to winds or might have to change path due to sudden obstacles. This might affect the range of communication links used such as Wi-Fi and radio. Additionally, obstacles might also block transmissions resulting in delay or loss. Swarm agents with limited fuel capacity have additional problems. Attempts at reconnection and prolonged communication at low signal strength might deplete power reserves more quickly, reducing flight range on the mission. Adaptable connectivity protocols are needed in this scenario [41]. Here, a hierarchical topology is described, where a master drone controls a fleet of lower-level drones that can fly the search area. The master drone acts as a data pathway to the control center. Single link topological frameworks such as this always have the issue of data pathways failing. Since these are also agents that are exposed to operational space dynamics, there is a probability of them failing as well. By assigning different area restrictions to master and low-level drones, the study ensures that there is a persistent data pathway between ground control and end agents. Figure 5 shows a high-altitude fixed wing aircraft that has the equipment necessary to connect it to a ground-based communication system. A low altitude leader-follower quadcopter swarm is connected to the fixed wing aircraft. The swarm is able to communicate with ground-based stations located at a considerable distance using the fixed wing. However, there is still a probability that the master drone fails due to obstacles. Relay based connectivity maintenance [42] uses a similar communication link that uses relay and articulation UAVs to connect surveillance UAV agents in the swarm to a ground station.
Multi-hop communications are key to such models where relays are used to read a wider range. While [42] designates articulation agents to balance mission with network connectivity, it brings all nodes within the same operational space. Without an excellent swarm defense and onboard intrusion detection system (IDS) in place, enemy agents can focus their attack on mission-critical nodes and target them first to bring down swarm operations. Spreading relay nodes over a wider range of topography can bring down the ROF (rate of failure). For example, if the aircraft was flown at a sufficiently low flight altitude, ground-based relay stations could be used. Figure 6 shows a multi-hop data pathway selection process that can occur between a source agent and a destination agent to relay messages. The routing protocol governing this transmission has to consider various factors such as agent locations, energy required, transmission time, etc.
Routing protocols govern data transmission between network nodes. Hereby a swarm of UAV agents is capable of forming an ad-hoc MANET, FANET (flying ad-hoc network), or VANET (vehicular ad hoc network) depending on the topology and study in question. UAV networks are more advanced than those mentioned above due to faster flight speeds and energy constraints. High mobility and dynamic distribution of agents make the design of reliable communication links difficult [43,44]. The existing challenges to resilient protocol design are furthered by considering the nature of the UAV agent and the environment.
Routing protocols depending on their design can be position-based, topology-based, and cluster-based. A survey conducted in [9] summarizes several design considerations for routing protocols such as topology, flight formation, latency, collision avoidance, and external disturbances. Essentially, these factors are related to the resilience modules presented in this study. Although they apply to agent communication, the same factors can be scaled and considered as issues when designing a resilient UAV swarm. Routing frameworks such as the one proposed in [45] claim resiliency in communication by using software-defined networking (SDN) controllers. Connectivity graphs can be created by using available channels and relaying information for a particular area. However, this often requires knowledge of operational space beforehand. If that is available, shortest-path algorithms determine paths that allow agents in a swarm to be separated over a wide geographical area to prevent jamming by an adversarial entity that seeks to block communication waves in one area. Smart selection methods capable of switching data delivery schemes are required. The four basic schemes among agents are unicast–between two agents, broadcast–from one agent to all other agents, multicast–from one agent to several agents, and geocast–from one agent to some agents in the swarm selected due to absolute location or relative positioning.
Another challenge with routing protocols is that most utilize unicast routing. Multicast protocols assume dense and slow-moving node structures. Efforts to increase efficiency in protocol design, such as in [46], design a multicast protocol based on predicting the trajectory of agents. By selecting a node with higher priority metrics, which has a high chance of encountering an agent that needs to forward information, messages can be relayed faster. The calculated priority metric was dependent on start time and duration of the encounter with the transmitting agent. A priority encounter graph was constructed for this purpose. By equipping multiple modes of transmission depending on the position density and velocity of agents, routing protocols can act efficiently and guarantee constant connectivity and message delivery assurance despite disruptions.
2.1.2. Network Coverage
Optimal coverage of an area by a swarm of UAVs falls under the connectivity domain. Network coverage involves using the agents in a swarm to blanket a particular area such that all of the area is covered during application-specific purposes such as surveillance, while at the same time maintaining a standard quality of connection with other agents in the swarm. There is a tradeoff between coverage and connectivity that is recognized, and metrics such as those proposed in [47] study it. Multiple UAV swarms have applications in delivering persistent surveillance. However, features such as dynamic target tracking can lead agents astray and out of connectivity limits, which can lead to the loss of data and agents. Simulations on the exploratory problem using MAS show that to accomplish covering a certain area, particularly in cases where high rewards are offered to explore it, an agent might stray from the swarm thereby sacrificing connection with other agents or the base while doing so. Optimized models designed to balance connectivity and coverage such as those designed by [48] study the effects of network density on coverage and performance. Swarms with a smaller number of agents thus need high-level models, balanced with increased computational power, to handle more frequent formation control than swarms with a higher number of agents. A model parameter that requires agents to remain near each other might prevent agents from spreading out thereby restricting coverage. Bio-inspired ant colony optimization algorithms try to imitate ant behavior for communication and pathways based on pheromones. Chaotic ant colony optimization for coverage-connectivity [47] uses repulsive pheromones to visit unexplored areas. Alternatively, they were also used to avoid collisions between agents. With this approach, less work exists on balancing connectivity and coverage decision processes for swarms.
These forces can be calibrated to consider network strength. Thus, areas that might weaken connections between swarm components are assigned higher values to discourage single agents from attempting exploratory tasks. Intelligent algorithms can however assign a group of agents to visit high force areas such that the entire network shifts in that particular direction thereby maintaining network strength.
2.1.3. Network Structure and Characteristics
Network structure and characteristics play a major role in defining how resilient an UAV swarm will be to disruptions. While security components protect swarms from malicious intent, inherent network topographic structures, organization policies, and characteristics such as jamming resilience and energy efficiency can reduce other disruption margins and aid in strong connectivity [49]. While network structures typically define how a network is built with regards to nodes and resources, topology, and hierarchies for decision making, network characteristics deal with any intrinsic abilities that may be built into its structures such as jamming resilience, energy efficiency, and self-healing capabilities. This section examines both structure and characteristics in detail. Modified network topologies can have a substantial impact on how a network responds to a disruption. The most conventional of these is the hierarchical agent topology where some agents have a higher-level designation and act as leaders of a swarm. These agents may differ in their nature or hardware, leading to swarms being heterogeneous, perhaps even simply by their designation.
Article [41] created a similar topology in which agents are masters or followers. Each follower drone is an explorer whereas master drones are data collectors and major communication nodes. The master drones assign exploration areas to the follower drones. One master is responsible for several follower drones. The duties of the master are to maintain a set distance and signal strength with ground control at all times. Such tree topology implementations are often the first step in developing structured network systems that may increase swarm resiliency in a stepwise manner. Additional modifications to these networks are possible such as the addition of heterogenous agents as discussed in Section 2.6. Master drones are often high-altitude fixed-wing aircraft that control numerous low-altitude quadcopters.
Additional network layer modifications can also influence vital factors of communication such as the transmission power. Article [50] proposes the addition of a new layer between the data link and network layers. Each agent node has the ability to adjust its transmission power for sending data while maintaining stable connections with other nodes. The additional layer has decision constraints to prune unnecessary links and set the transmission power based on the nearby agent range. The proposed network has energy efficiency properties due to fine control of data transmission power. Depending on the number of nodes in the network, the target area can be divided accordingly, and an appropriate number of agents can be assigned to cover it. Article [51] proposes an advanced model that can differentiate between an agent in standby mode or active flight. The amount of energy consumed by an agent in active flight vs. being in standby mode is considerable. A model inspired by [52] splits the power required by the agents into flight power and standby power. Splitting energy demands allows for finer control over consumption as well as other functions such as task assignments and agent callback/deployment functions. Models that consider the state of agents and their energy consumption can be upgraded to allow for additional functionality. An agent in active flight may consume more power while performing certain tasks, allowing other idle agents to be on standby. This agent will have a lower availability of flight power “e” than standby agents. During task assignment, the control scheme can decide to recall this agent to redeploy a new agent or use the new energy value as a constraint in determining task allocations to the swarm. While fine control over energy consumption such as in [50] may not always enable superior performance, the inclusion of energy-efficient features in all areas of agent control may extend swarm flight time considerably. Conventional ad-hoc UAV networks do not have such flexibility, and all nodes transmit at the same power level for a fixed transmission range. However, transmitting at power levels higher than required can reduce network efficiency and impact flight time.
Solutions such as this can also solve the malicious attack problems discussed in Section 2.1.3 where nodes are compromised and forced to transmit packets at lower transmission powers to misdirect the attack or to cause latency issues. However, flexible power transmission control can allow neighboring authentic agents to efficiently capture these data packets and ensure that they reach the destination, making such attacks fail. The role of blockchain implementations as a security upgrade to UAV swarm networks has been discussed briefly in Section 2.4.2. However, their integration into network structure can also have added benefits towards building resilient networks. An agile implementation [53] defines an UAV network that is decentralized by using SDN and blockchain technology. It has the usual application, control, and data planes. The data plane is present on the UAV whereas the other two are at ground control.
The location of network planes is important. In [53] for example, the ground control location of the control plane gives it a global view of the network that other routing protocols lack. All agents in the network are aware of the swarm status. Control stations act as the deployment of the blockchain. Multiple ground stations share and synchronize data over the blockchain. An added advantage to this is the fact that the swarm has up-to-date data on the shortest routes and destination status anywhere they go, as long as they are in the range of a single ground station.
Swarm agents that act as the main creators of data on the data plane also add information to the blockchain. Task scheduling and flow table information are maintained and updated using smart contracts. Article [54] studies application-specific functionality of drones for hybrid cellular network deployment. Studies show that prolonged use of UAVs, particularly for drones as a service (DAS), has been in limited deployment due to factors such as limited flight time, collision avoidance, and onboard hardware capacity. Examples include the use of drones to provide emergency communications or vehicular micro-cloud services [55]. Modified network systems are needed to improve agent performance, and this study proposes a swarming strategy of agents based on continuously monitoring swarm geometry and the environment. Langevin dynamics were used to study agent interactions. Self-organizing characteristics were based on crystallization of molecular structures in condensed matter physics. However, self-organization occurs in chemical, robotic, cognitive, and natural systems as well. By allowing network nodes to develop a self-imposed hierarchy based on external or internal factors, an order can be established from an initially disordered system. By using external stimuli, or in this case demand requests by activated end users, matching supply movements can be created.
Application-specific research such as [56], which provides solutions for a disaster-resistant network by using UAV deployment, can also be used to make UAV swarms inherently robust. Although the problem addressed is mainly UAV deployment and formation to provide network services, these solutions can be applied to address network coverage problems to create ad hoc resilient UAV networks.
The proposed approach has the deployed UAVs act as aerial base stations (ABS) and estimates the position of user equipment in a disaster-struck region by using their uplink signals. User and ABS locations go to a central location where the signal-to-interference plus noise ratio values are calculated. Users are assigned to a particular ABS according to the max user per ABS limit and a clustering algorithm deploys ABS to final locations. Similar approaches can be used where agents can act as nodes in a network topology to which a set number of other swarm agents connect. Once connected, by using range limits of onboard communication equipment as a weight parameter, agents can be deployed to create a multi-node UAV net where every agent in the swarm maintains a stable connection with a specified number of swarm mates. Further upgrades to such networks such as energy efficiency and jam resilience can be introduced. Jamming resilience is typically used to defend against attacks that seek to disrupt routing protocols by compromising selective nodes. Data sent through these nodes are then captured and analyzed for additional information on how to compromise the network. Such attacks can be executed by corrupting a valid node in the network or by the addition of a new foreign agent-based or ground node that the swarm assumes is a part of the network. Every drone is essentially a node in the FANET that has localization capabilities. Link quality is measured using metrics such as RSSI (received signal strength indication) and SINR (signal to interference plus noise ratio). Additional schemes for traffic load and spatial distance are used to create a ‘jamroute’ protocol that has source nodes search their real-time changing routing tables for the shortest routes to the destination node [57]. In the case that the node is busy, a broadcast request is sent that has a packet of information such as source node, destination node, and max traffic loads. Each node has unique identifiers that associate it with the network, thus making it difficult to add malicious nodes to the network as a means of attack. Additional proposed schemes for link quality and traffic load prevent attacks such as a limited transmission power attack where the compromised node drops a data packet by transmitting it with reduced power. Protocols those such as in [57] prevent the loss of data packets by creating multiple forwarding paths. Even if one node attempts sabotage maneuvers, other paths ensure all packets reach the destination node.
Based on the characteristics of the routing table, the protocols can be further categorized. In static routing protocols, once created, the routing table cannot be updated. However, this is not suitable for dynamic formations and large swarms. Article [57] discusses other protocols, such as proactive tables, where tables are updated periodically. Hybrid routing protocols combine proactive and on-demand routing. Fixed network topologies are often an issue when it comes to improving ad-hoc networks. Ad-hoc networks are necessary to supplement higher costs and range-limited communication such as cellular communication and Bluetooth. Fixed topology networks do not scale for ad-hoc connections very well. Dynamic topology reconstruction protocol (DTRP) models such as the one in [58] consider changes in UAV network topology. The DTRP uses a master node and a worker node. The master controls the internal swarm network, and the worker node is responsible for the transmission of sensing and flight information. The master node transmits initialization messages to all follower nodes in the area. The worker nodes then change the node information of the message from that of the master to their own and forward the message to other workers that are out of direct reach of the master node. If a set time elapses and an acknowledgement message is not received from the worker node, the master node is converted to the lowest node in the link table. Minting link information tables such as these assist in verifying the position of each node on the map, as well as information control. The return messages contain location information, which when overlaid on a map pinpoint the location of each node in an area and also areas where no nodes are present. Therefore, such areas can be serviced by redeploying some agents in the swarm to them.
2.2. Movement
This component covers the decision process that involves the movement of the swarm agents in operational space, including flocking, optimized area coverage, path planning, and obstacle avoidance. As such, these are the physical behaviors that a swarm might exhibit during its operation. Major modules of the movement component are recognized to be area coverage, path planning, obstacle avoidance, collision avoidance, navigation, formation control, and flocking.
2.2.1. Area Coverage
While Section 2.1.2 discussed tradeoffs between network coverage and connectivity, this section discusses area coverage as a part of the movement component. These problems are often intermixed with each other. The coverage problem determines the success and probability of when the area will be completely scanned. It is often defined as increasing coverage while managing trajectories and disruptions. Article [59] defines swarm coverage as a process to cover a selected region. Swarm area coverage is an important decision process for swarm systems. Area coverage is often utilized in application-specific scenarios to cover a region of interest (ROI) with a swarm of agents, particularly as a movement problem, with less regard for connectivity maintenance and more focus on completing a particular goal. A similar problem framework is discussed in [60]. “Chaos-enhanced mobility models for multilevel swarms of UAVs” mentions how area coverage is an original problem by describing it as “focusing on the mobility management of a swarm of autonomous UAVs to maximize the coverage of a squared geographical area”. The resilient component differentiates this from a simple path-planning objective. The two main objectives are for the swarm to cover a given area as well as counter any unpredictable disruptions that occur during the process. Considering the target area properties is an important input for decision-making models for swarm operations. Network coverage and area coverage differ in terms of how ROI is used. While network coverage focuses on making sure that agents in the area are always optimally connected, area coverage addresses the coverage problem and describes the actions taken by a swarm of agents to cover the ROI. The target space may differ in terrain and ground cover, as well as the presence of water bodies, wind channels, and stationary or dynamic obstacles. Current issues with area coverage lie mostly in the dimensional space in which they are tested. Most existing simulations portray coverage in a two-dimensional space. In [60], altitude information is not considered. Formation deployment controls may require agents flying through constricted spaces to fly in tighter formations thus requiring agents to vary in flight altitude rather than sweep area. This is especially prevalent when reaching consensus after obstacle navigation and post-deployment primary formations. The control methodology in which agents cover an area can be categorized into different types and [61] offers a naming convention for them as follows. Static coverage is a standard agent deployment method in which an UAV examines a particular spot for its target. Several such agents examine individual spots. Barrier coverage forms a perimeter that can detect the entry of any object through the barrier. These are usually deployed on security-specific applications. Sweeping coverage is the name the authors have given to the dynamic deployments of agents which can change formation as they move through the area. This is the standard procedure followed across any SAR protocols. Several coverage models have been described such as imposing grid cells on the ROI to ensure that every cell is covered or dividing the area into small bits that are assigned to the agent’s area decomposition [62,63] and sweep motions [64,65]. Article [59] mentions two primary methods for cooperating coverage, centralized, and distributed decision-making. They propose a self-organized decision-making approach for the problem modeled in velocity space. The approach is divided into perception, decision, and actions. Multiple UAVs coordinate with each other for sharing position, velocity, and obstacle information. Their decision uses a reciprocal coverage method that creates collision-free optimal spaces. The swarm coverage decision model considers the above parameters with collision avoidance with other agents, obstacle avoidance, and optimal velocity decision in each iteration. This is carried out using the Monte Carlo method for velocity-finding in confirmed space.
A different obstacle characteristic is considered by [66] while solving the area coverage problem. Not all obstacles have the same threat levels, nor are all of them equal in terms of dimensions and nature. Additionally, energy constraints on UAVs during coverage problems have often not been addressed in complex scenarios. They propose a two-step auction framework for energy-constrained UAVs in a given area. The agents evaluate the threat levels of each area cell referred to in their paper as a module and bid in an auction for the UAV to come to it. If two bidding prices match, energy loss is also considered. The UAV determines the winning module. The second step is the obstacle avoidance strategy for any obstacles that the UAV might face while traveling to the winning module. In the case that an obstacle is unreachable by flying over it, the second-best module is selected. Additional constraints for sleep mode and two UAV bid clashes are also designed. Such strategies are also viable alternatives to reward-based ones where agents are rewarded for considering a particular area. Additional parameters such as energy considerations can thus be programmed.
2.2.2. Path Planning
Efficient path planning for multi-agent systems is a prevalent challenge in swarm development. Algorithms such as Particle Swarm Optimization (PSO) are developed to find near-optimal solutions. Multiple iterations on a solution may provide better results. Several biologically inspired heuristic algorithms have been proposed for path planning. Bio-inspired algorithms have found remarkable success in the movement development of multi-agent systems as they exist predominately in the animal world. The development of such algorithms drew its inspiration from group behaviors in fish shoals, bees, and ants [67]. Article [68] proposes a modified fruit fly optimization algorithm. The original fruit fly swarming is inspired by fruit flies making their way to ripening fruit. The modified algorithm divides the swarm into smaller subswarms. By allowing flexible search parameters there is a shift from a global search to a local search as the mission timeline progresses. This expands the search space considerably. The FOA (Fruit fly optimization algorithm) uses two search parameters, sight, and olfactory. While the visual search is a greedy search, the olfactory search is a directional search that examines the greatest concentration of the target in a cell and proceeds in areas with increased concentrations. Both processes are repeated until the termination stage is reached near the target destination. UAV inputs can be used to program essential paths for individual agents. Paths to the destination can be calculated by using terrain data, weather, and network signals as inputs. Based on pre-established network availability from base to destination, each agent can move on a path that has the best-preestablished parameters such as SINR. Secondary inputs such as terrain can be analyzed using the visual input.
Distributed path planning for multi-UAVs works similarly, ref. [67] where SAI (Surveillance Area Importance) values for each cell are analyzed and a connection is established that shares each UAV’s location. The leader agent checks the area based on past SAI values, and uncovered areas are subdivided. Individual trajectories for each agent are generated. SAI is an intrinsic value generated and defined by [67] based on the probability of outside agents entering a restricted airspace. Since this is an application-specific development, such values are required. For general purpose use, however, the above-suggested values such as network strengths can be used to establish the grid importance. An alternative approach used by [69] uses external threat models to create channels through which agents can travel. The weather threat model measures wind and rain states and the transmission tower model calculates a safe path some distance away from transmission towers to prevent their electromagnetic waves from disrupting agent navigation systems. An upland threat model measures the terrain below the agents to maintain optimal distance between aircraft and the ground. An adaptive genetic algorithm controls the path generation schema.
Modeling individual threats as functions that act as inputs to learning algorithms is an efficient approach to creating low-cost shortest route solutions. By allowing models to scale as per a particular environment, threat functions that are not present can be eliminated thereby allowing quicker convergence on solutions. For example, the transmission tower threat function will not be used in an area that does not have them, thereby reducing overall model complexity.
While most research generically uses the term collision avoidance and categorizes together all impacts of UAV agents with other agents or in-path obstacles, this study classifies them separately. Obstacle avoidance deals with any static or dynamic obstacles that might be present in the flight path. Examples include geographic terrain, buildings, trees, birds, etc. Collision avoidance deals specifically with avoiding impacts with other UAV agents in the same swarm. Each is discussed separately in the following sections.
2.2.3. Obstacle Avoidance
Movement systems of UAV swarms for path planning, obstacle avoidance, and general navigation require comprehensive integration with each other to provide acceptable performance. Article [18] discusses a unique system that develops drone reflexes to maximize agent safety. They utilize a dynamic evolutionary algorithm to create drone routes, and a reinforcement-based learning algorithm to use system state data and create feedback loops. Drone reflexes are labeled as reactive actions performed by agents to prevent collisions with sudden in-path obstacles. Case studies such as this highlight the differences in modules for obstacle avoidance and path planning while also demonstrating the need for these modules to work closely together. Quick computation of alternate routes is required once a collision is foreseen by the learning algorithms. Moreover, path planning has a sub-module that calculates the trajectory progress of all agents in the swarm. While quick solution methods to reach optimal performance in collision avoidance dictate that the trajectories developed do not intersect, this is not an ideal solution. Real-world scenarios often require agent trajectories to overlap during application-specific functions such as target search. In such cases, the trajectory planner also has the responsibility of near real-time tracking of all agent progress concerning their defined trajectories. Any overlapping paths must not have agents present at the point of intersection. A wait-and-go action process must be implemented where an agent waits in hover mode while the other passes the point of intersection. Alternative solutions include introducing an altitude adjustment component. Two agents may follow intersecting trajectories without waiting if they are separated by a safe flight altitude.
The autonomous navigation system in [18] uses an offline component to generate the shortest paths between start and end points based on standard information. The online component is a dynamic monitoring system that utilizes a feedback mechanism to detect changes in swarm reconfiguration and suggest reorganization of swarm routes when necessary. Prediction features use monitoring data to predict drone movement and collision. Additional modules for safe area computation and reflex computation are present. The reflex module outputs reflexes for drones to avoid in-flight collisions.
The weighing mechanism in the hierarchical methodology in [70] is assigned levels based on the distance from the master UAV for each sub-swarm. Obstacle avoidance is inspired by occasion and behavior. If it is determined that the intended movement of the swarm and the obstacle point positions satisfy constraints that make it impossible to avoid, the master UAV then attempts to move in a direction tangent to the obstacle. The flocking control uses a hierarchical model that labels master UAVs as information UAVS. These decision-making agents act as the center for a flock of ordinary UAVs thus forming a sub-swarm. The objective of the study is to ensure that ordinary agents follow the information agent. Thus, by controlling the actions of the information UAV for obstacle avoidance and using flocking control on ordinary UAVs, the sub-swarm is shown to successfully avoid obstacles.
2.2.4. Collision Avoidance
The collision avoidance problem has been recognized by research as being separate from obstacle avoidance. While research such as [70] uses cooperative formation control to avoid obstacles, ref. [71] uses predictive state space to generate collision free trajectories for agents. The most prevalent way among current research of avoiding collisions is by using agent state information and generating artificial potential fields. The mission-based collision avoidance protocol (MBCAP) in [72] uses a similar strategy. Every agent broadcasts its current and intended next stage position. A collision detection process receives them and checks for coordinate matches of agents. In the case that a match is found, a stop signal is sent to those agents. Upgrades such as agent priority are also included where each agent has a priority level, where in the case of a collision threat, the lower priority agent gets a stop command while the higher priority agent can pass.
Additionally, altitude adjustments are often used to avoid mishaps. On a collision alert, the two agents can adjust their altitude for one to pass over the other. Article [73] uses a modified trajectory modification such as the one described above to climb and descend in order to provide vertical separation at the closest approach points. The global aim is to have the least number of modifications overall. However, this necessitates a higher-level integration into swarm motion to avoid collision with other agents in the same altitude range. Higher-level decision models can be computationally expensive and take more time to reach the decision stage. The second method is the artificial potential field method and several functions such as the flat-h function and hyper quadratic surface functions for the shape of potential fields have been studied [74,75,76]. The method considers each swarm agent as a charged particle and can set a potential field based on current configurations. The two forces, attractive and repulsive, decide how surrounding agents behave. Potential field models generally have higher computational costs than using location-based methods but have the advantage of lesser offset and error rates than image-based detection and avoidance of other agents. Moreover, using image sensing equipment for agent avoidance may employ equipment that can otherwise be used for mission purposes. Potential field generation and location tables can be handled at ground level and on unit, respectively. Potential field functions set artificial barriers around an agent that another agent recognizes and cannot cross. While these can be dynamic during the flight timeline, most current studies discuss a static volume for the generated field. This is comparable to the generation of a miniature no-fly zone around every agent. Article [71] divides the air space into cubic grid cells as they are easier to use when calculating agent positions. The rolling optimization algorithm they use estimates agent collision and offers updated trajectories to avoid them. It uses heading direction concerning current positions and the distance between two UAV agents as constraints for improved trajectory generation. Here, the distance between UAV agents is calculated with protected spheres, which are state spaces around agents with a radius greater than the safety distance. If two spheres were to overlap, the UAV agents would collide.
Similar approaches construct dynamic collision avoidance zones around aircraft in the horizontal [77,78] and vertical planes. These are used to detect flight conflict trends. The construction of both planes to detect a collision is simulated in [79]. While their particular method was applied toward a pursuit–evader scenario, similar scales can be applied to swarm agents to detect and actively avoid other agents nearby.
2.2.5. Navigation and Localization
Localization and navigation are two important properties required during swarm movement, as the two are closely interlinked. A navigation path cannot be established if agents are unable to sense their position relative to important points on the map. Localization is necessary for successful swarm navigation, as most multi-agent system applications require that each agent has a level of awareness regarding its surroundings as well as an ability to discover its location with respect to the local environment. Global navigation satellite system (GNSS) modules on agents can handle the problem, however not all UAV models are equipped with the necessary hardware. Low-cost agents often do not have GNSS modules due to additional costs. Other constraints such as aircraft weight and fuel constraints also prevent upgrades. Swarms equipped with GNSS may not work well in indoor environments, varied geographical features, or underwater due to weak GNSS signals. Additional methods need to be implemented especially if the swarm includes heterogeneous agents that are spread out over varied operational spaces, for example, an underwater submersible together with an UAV. While the addition of such agents has resilient implications, it mandates the need for upgraded localization methods [80].
Additionally, as [9] mentions, even GNSS module inputs may be insufficient for localization with smaller update intervals. Differential or assisted GNSS solutions were examined and provided far more accurate results. Article [81] provides a combination solution that uses GNSS, an inertial measurement unit, a baro-altimeter, and range radio measurements if GNSS is available. A fused reading is obtained by integrating all four sources. In case GNSS is unavailable due to any factor, the platform switches to an alternate solution based on the other three. While this may not be as accurate, it provides an estimated relative position estimate as well as reduces overall swarm drift that occurs in an IMU-only type system. The study also progressively explores some members of the swarm being resilient to GNSS interference, an observation can that can be utilized in the development of heterogenous swarms.
Localization methods can be of different types depending on how they function. There are methods that do not rely on the range and methods that do. Article [80] classifies them as range-free and range based. Range-free methods are more localized using techniques such as nearest neighbor information or node information [82]. Range-free solutions may be faster and computationally easier to process, however at the expense of reduced accuracy [82,83,84,85,86]. Alternate solutions exist such as using vision systems equipped on agents to estimate location. Image matching though is typically more suitable for indoor environments due to computational costs and time delays. Moreover, persistent localization may be a challenge as this might require vision sensors to be up to par with capture requirements. Article [87] mentions an indoor localization process using image capture. Passive beacons such as navigational pads can be assigned coordinates on a cartesian plane, and all agents include image processing algorithms designed to recognize the mission pads. A similar approach is used by DJI Tello drones [88] by capturing and recognizing quick response (QR) codes. However, the range of camera sensors and their directional position limit widespread adoption.
These methods use the vision sensors installed on the agents. Other methods may use an externally located camera along with image processing to detect the agents and estimate their location [89]. Such approaches have widely been used in indoor localization techniques. The drawback with using these systems outside as opposed to indoors is that it is much more difficult and processing-intensive to implement in an unknown environment.
Article [90] conducted an experiment where a cooperative path planning strategy was implemented between agents that have GNSS coverage and with others that do not. The agents with nominal or more GNSS coverage stay in the visual line of sight of agents that lack it, thereby guiding them through an obstacle filled environment. Range-based solutions [91,92,93] use actual distance values for unknown nodes, but additional hardware is required on the nodes in exchange for more accurate results and equipment cost may be an added factor.
Article [80] proposes a backtracking search algorithm (BSA) with multi-hop localization that improves resilience if reference nodes are not recognized correctly. The BSA is an evolutionary optimization algorithm that uses past solutions to find solutions with better fitness. The proposed approach here uses each unknown node to first estimate its distance from a preset point using multi-hop signals. A min-max method obtains coarse values for node location. The last stage takes multiple such contributions of the estimated node locations from the other nodes and provides a refined approach. Additional measures such as a confidence factor evaluate accuracy and can be programmed in multiple ways. The range of neighbors whose contributions are considered can be expanded or multiple iterations of coarse readings can be taken to establish finer mean values. Agents in a swarm act as nodes that broadcast their routing information periodically. Other nodes receive this information, and every node maintains a table of other agents. Neighboring nodes are given prevalence in terms of their receiving data packets. Prediction algorithms use the routing table to predict the location of agents at every turn to estimate the location of the nodes. Agents in sectors present in the direction of the destination node are naturally given preference [94].
2.2.6. Flocking
Flocking is a group behavior where all individuals in a large group exhibit consensus in terms of movement, navigation, and obstacle avoidance. Local rules dominate swarm decisions [95].
To realize flocking, all members must follow a similar trajectory often defined by higher-level agents in the swarm. Article [96] provides the groundwork that assists in classifying flocking in separate sub-modules from formation control and collision avoidance. While flocking and formation control are both sub-modules for swarm control, they should be categorized independently. Flocking dynamics are not particular in terms of the final goal [97], but rather focus on substages in swarm movement such as before and after an obstacle is avoided. Formation control may specify higher-level dynamics and control over agent hierarchy and the decision process that assists in creating swarm dimensionality in terms of physical shape. Collision avoidance is usually defined between two members of the swarm and requires active monitoring of agent location and trajectory. Formation control maintains a set swarm formation shape throughout the navigation and path changes of the flight process.
Flocking behavior is thus a combination of dynamic navigation and obstacle avoidance with velocity matching. Such behavior has been observed in nature in swarms of bees, fish, and birds. The global objective is often to move towards a region as a whole. Certain formations may provide more aerodynamic qualities to the swarm reducing wind resistance and providing longer flight durations. Article [96] notes how specific formations of fixed-wing aircraft have a reduced overall drag coefficient. Several formation control methods use a form of hierarchy such as leader-follower, or force methods by using potential fields generated by agents [60]. These are less than optimal solutions that increase complexity due to the addition of collision and obstacle avoidance. Bio-inspired pheromone based funneling of a group of agents by herders as well as behavior-based methods are also prevalent [60].
2.2.7. Formation Control
Multiple formation strategies have been formulated by researchers such as leader-follower and virtual structure [98]. Article [99] mentions the usefulness of high-fidelity biological models in formation control and tracking. The grey wolf tracking strategy uses the four-level division found in wolf packs, alpha, beta gamma, and omega. While alpha agents are decision-making agents in tasks such as directional movement, division of labor, and target pursuit, beta agents are for communication. Delta agents act as sentries for the pack. Extending this concept, ref. [99] develops an adaptive formation tracking protocol in a pursuit scenario inspired by wolf behavior. The agents follow the wolf tracking strategy of tracking leaders and formation before encircling the target. Multiple modifications to this control strategy are examined in [100,101,102,103,104]. A centralized control approach may have higher computational costs with an increase in the number of agents. A decentralized formulation such as by [98] called the Markov decision process describes the creation of formations in short time ranges. The authors of [105] define a waypoint-based formation control protocol called mission based UAV-swarm coordination protocol (MUSCOP). The master UAV follows a set of defined waypoints during mission planning. The follower UAV stays in formation between waypoints along with the master. Once a waypoint is reached the master synchronizes its position with the follower UAV. Relative location is used by the master to define formations. The center UAV is the master and follows mission parameters whereas the surrounding UAV follows offset coordinates. The protocol scales well in with large UAV swarms and has a negligible time delay in terms of the synchronization wait required at each waypoint.
2.3. Search-and-Rescue (SAR)
SAR missions are usually defined as an exploration problem. Exploration approaches can be used in a wide range of applications [21]. Target search applications can include searching for an intended target such as an entity in danger or need of medical attention or surveying the aftermath of an accident. The search function can also be expanded to include other agents in the UAV swarm that might have malfunctioned and crashed. Two major applications of the search function are discussed.
- Target search and tracking for entities that are not a part of the swarm.
- Track and search for agents of the swarm to open further conditional processes related to mission progress.
Rescue activity has additional decision parameters. If a crashed agent were located by the swarm, the cost of additional time and fuel that would be required to recover the agent should be incorporated into the model as a function that opposes the primary mission function. Additional conditional statements must be programmed to gauge agent failure in the first place. If the agent has failed due to a locally present disruption, deploying additional agents may result in their loss too.
The search function is an application of UAV where the aerial vehicle hunts for a particular target using vision ability or location information. Searching for a target using an UAV has various challenges. Depending on the hardware used, UAVs may have limited sensing and communication hardware onboard. Capturing raw footage and sending it to the ground station to be processed is computationally costly and may introduce delay. Two types of search algorithms are often used to enable autonomous search: (1) visual search using learning-based detection algorithms [106], and (2) location-based search using active or passive onboard sensor arrays. Search algorithms conventionally divide the area by using a probability index of where the target is most likely to be present [107,108].
Similar to functions discussed in Section 2.2.1 and Section 2.3, UAV swarms allocate multiple agents in a cooperative problem formulation to each search a part of the grid. Path planning and formation control modules keep agents from colliding while preventing explored areas from being searched multiple times. Article [21] proposes a nonlinear MPC solution for searching an area. Citing communication and delay concerns for the control, each UAV optimizes self-control instead of processing at a ground station. A PSO algorithm is used to find problem inputs such as airspeed and roll angle. A cost function is also associated with the probability map to determine the effect of the search function on mission progress. Article [109] proposed a vision-based search function for mobile ground targets by an UAV swarm. Equipment challenges exist such as the agents having cameras with a limited field of view. With vision-based functions, targets may also not be recognized accurately if low-resolution equipment captures inputs from higher altitudes. Dealing with mobile ground targets requires additional considerations as compared to a fixed target. While formulating the target search, they use cooperative coverage control which is categorized under area coverage in Section 2.2.1. For the probability map update, each agent is assigned its map for the whole region and takes individual measurements of its assigned area for examination before updating it on the other agents. The time delay that might occur due to this is not addressed in their paper. Cooperative agent vision-based inputs creating dynamic probability maps have a distributed nature, where complete network connectivity is not required. The probability map uses a fusion of the Bayesian function with consensus from multiple agents. A pigeon-inspired optimization proposed by [110] is inspired by birds using geographic magnetic fields and landmarks to reach destinations [111]. Article [112] uses a profit-driven adaptive moving targets search (PAMTS) which uses the familiar decomposition technique for dividing the search area into equal cells for each agent. An observation history map is created for each cell by the agent surveying it. This can then be shared with other agents to create a global knowledge base. The two objectives here have a tradeoff, the explore action wants to reach newer cells whereas the following action needs to track already detected objects. Moving target search problems is computationally intensive, as they are classified as NP-hard. A recent observation table allows agents to change their behavior weights which in turn balances the tradeoff. The reward for each cell creates the decision metric, where greater rewards are given to cells with a higher probability of the target being located there. The neighboring cells thus require priority in being explored. Similar strategies are used for the area coverage models discussed in Section 2.2.1. The adaptive framework in [112] consists of 5 components: module-sensor inputs, information merging, operation adjustment, profit calculation, and path planning. Location-based search functions rely on the last known location of the targets that are to be tracked. However, they alone may be insufficient to pinpoint the target location. Typical application scenarios are to locate fallen swarm agents. Agents failing due to any internal or external disruptions have to be located and rescued. Often finding failed agents may give an insight into the disruptions that caused them to fail in the first place, whether it be due to territorial birds damaging the aircraft, entanglement of flight equipment with foreign materials, or some other cause.
Location data is usually from active location broadcasting equipment that is present onboard the agents. In several cases, the agent may be lost in the vicinity of where it last broadcasted its location from. Swarm agents may collect this information and home in on the location. Based on the accuracy of location equipment, a switch can be made to visually search the area to locate the fallen agent. In case an active location is no longer available due to loss of critical flight power, triangulation methods can be used. Based on swarm formation, the nearest neighbors of the fallen agent can provide a rough area in which the probability of agent crash is highest. Visual search patterns may be used to further refine the search. Agents can be equipped with location tagging solutions that run on independent power such as Apple AirTags [113] or other similar products. These are light and low-cost sensors that can be added to the agents externally. They trigger location alerts using other active equipment present nearby such as cellular towers, mobile phones, and modems to find the agent. UAV target rescue scenarios are usually application-specific and combined with target search scenarios such as in disaster management. Since the goal of this study is to examine approaches for generalized resilient UAV swarms, developments are necessary to facilitate retrieving fallen agents. There is a lack of research on the use of swarm agents to recover fallen agents. Due to the nature of operational space, it is often necessary that other agents with heterogenous capabilities are required. For example, in scenarios in which a swarm contains both UAVs and unmanned water surface vehicles (UWSVs) such as in [114], if the UAV agent fails, the water surface agents take up the responsibility of recovering the fallen agent. On the ground, an unmanned ground vehicle (UGV) can be deployed to try and recover the lost UAV agent. Apart from the physical recovery of agents, there should be re-connectivity protocols in place that attempt to establish connections with lost agents that have been found on the ground.
2.4. Security
Swarm security is divided into two main categories. Physical agent security and protecting the swarm from cyber threats. Both are discussed in the following sections.
2.4.1. Physical Security
The physical security of agents deals with the detection of threats that might physically impede swarm progress. Additionally, defense or escape countermeasures should be designed as part of securing any multi-agent system. The counteraction from swarm agents is a response of the agents once a threat is detected and can include the following.
- Counteraction of UAV swarms against malicious agents trying to take down agents in the swarm
- Counterattack of UAV swarms against malicious agents trying to enter a restricted airspace
In either case, a threat classifier is needed for UAV swarms to detect and recognize potential threats. One defense approach to incoming malicious agents is to engage a swarm of counter-attack drones to intercept intruders. The approach by [115] follows a similar method by deploying a swarm of drones that approaches the intruder UAV. The deployed defense agents form a cluster around the intruder and restrict its movement while attempting to herd it to a non-threatening location. The assumption is that the enemy agent is aware of other agents surrounding it and will take steps to prevent collision with them. However, if an enemy agent is not equipped with such abilities, there is a high possibility that it may collide with one or more of the defender agents and result in damage or loss. UAV agents can also be used to jam network connections of enemy agents and stop their crucial operations. A GPS spoofing attack was proposed in [116] where it attempts to take control of an enemy agent. This is considered accomplished when it can successfully artificially specify the enemy agent’s perceived position and velocity. By controlling the agent and providing false data it is possible to disable the enemy. For example, the spoofer used in this study earlier demonstrated similar actions whereby it falsely produced ascending actions on a captured UAV that was hovering. To compensate, the agent started a descent and would have been catastrophic unless precautionary manual control took over [116,117]. However, such solutions which involve the deployment of additional drones for counterattack can be an expensive process considering the physical interactions that might take place among these agents. Replacement and repair of damaged defender aircraft can be costly. Such approaches should be deployed only, when necessary, when the main swarm is deemed incompetent to defend itself. Other solutions exist that can be accommodated onboard existing UAVs without the need for additional agents. Enemy agent ability jamming and evasive maneuvers are often advised in UAV swarm defense [97]. For recognition of enemy agents, detection methods are necessary, especially to differentiate between swarm agents and foreign agents. While this can be done using software in-loop, network recognition, and unique hardware identifiers, vision-based frameworks are also being studied. For example, ref. [118] uses a vision-based object detection method backed by deep learning to detect and track a potential enemy UAV. In addition to detection, a tracking system is implemented to keep the detected agent in a local bounding box and follow it.
2.4.2. Network Security
A large portion of control tasks for UAVs is dependent on a network structure. Any device, node, or link over a network is susceptible to cyber-attacks. With recent developments of malicious agents attempting to dissuade swarms from functioning, damaging the network capabilities of an UAV swarm is the primary method of executing attacks [57]. Moreover, the remote nature of UAVs, combined with limited battery power, fast switching routing, formation topologies, and small onboard computing power has made securing drone networks a challenge. As with any network, FANETs are susceptible to attacks as well, more so because of their high mobility and reduced computational powers. Onboard agents have reduced computational power, and most of the processor load might be dedicated to functions such as flight, navigation, and mission tasks. Any security measures thus need to consume as little energy and computation resources as possible [51].
Although attacks such as eavesdropping can be prevented using encryption for transmission, other attacks may still penetrate UAV networks. The encryption keys must be secure themselves to guarantee performance. Current security and management deployments assume that UAV swarms may accomplish tasks on a single charge. If refueling is needed, the subtraction of old agents and the addition of new swarm agents should be considered. Article [45] creates a swarm broadcast protocol that accounts for rapid changes in swarm numbers, such as the addition of new drones. It also accounts for agents leaving the swarm for activities such as fuel recharge. The addition of new agents may require them to use the encryption keys used to secure network transmissions. However, challenges to this approach include offset delays that may be caused by validating new agents, the transmission of keys, and unstable networks interrupting the key transfer process. A loss of key transmission could cause new agents to be unable to decrypt transmissions [45]. The requirements of the key management scheme proposed are also similar to the IDS requirements discussed in the next section. A lightweight management scheme that consumes low network and CPU resources is desirable. Secure broadcast protocols work whereby every time the swarm changes its agent composition a new secure key is created. This is done to prevent the old key from being used by any attackers. The new agents have separate identifiers that recognize them to be a part of the swarm, this identifier unlocks the broadcast packet that contains the new key. The master maintains a list of all agent identifiers actively connected, and every time an agent sends a leave or join request the identifier table gets updated, and a new broadcast key is sent out. To prevent offset delays during key sharing, agents also receive an updated copy of the identifier table. They can then verify that the nearest neighbor is a verified agent and send the key packet. In this way, the master does not have to send the key to every individual agent. Intrusion detection systems are a reliable and efficient way of securing computer networks. Recent studies demonstrate they can be deployed on UAV networks as well [119].
As with a regular IDS, an UAV-IDS is created to detect any suspicious activity on the network and prevent its execution. Intrusion detection systems can be developed based on behaviors or anomalies. Bio-inspired particle detection IDS can also be used [120]. An updated taxonomy of intrusion detection systems has been conducted by the authors in previous research [121]. The IDS monitors network traffic such as data packets, transmission power, and routes, as well as new incoming requests from nodes.
While traditional attacks for computer networks may not directly apply here, IDS protocols can be easily modified to suit FANET requirements. An integration with Hyperledger Fabric, a distributed ledger platform, is possible to maintain unique identifiers for all acceptable nodes thereby blocking any unknown nodes from gaining access [122]. An IDS functionality can also be influenced by its deployment location. Typically, an IDS located at ground control may have access to higher resources than on-board implementations. The placement can be determined depending on factors such as the level of protection required, the type of IDS being used, as well as resource requirements of the IDS itself. Multi-layered IDS are possible but require additional considerations of network and node capacity during system development. A policy-based IDS can be created that sets distinct patterns of behavior that are allowed whereas all others are flagged and sent to a higher-level operation for additional examination. Several research challenges as mentioned by [106] discuss detection latency, IDS computational costs, and implementation overheads. A solution is required that is multi-positioned (agents and ground control both), multi-layered, and comprehensive in terms of attack detection and mitigation. Add to that the challenges faced by current IDS implementations, such as bottlenecks due to higher bandwidth and a lack of concrete defense policies [123], and attack classifiers contribute further challenges to the problem. Articles [124,125] have a rule-based mechanism for the IDS. Detection rules for some of the most notorious attack types are predefined. The location is at the ground station and categorizes each agent in the swarm by its alleged threat. An intrusion report message is generated by each agent and sent to the ground station, which assists in verifying agent status as well as any foreign agents that might seek to infiltrate the swarm. A verification check is conducted by using anomaly detection backed by learning algorithms trained to identify and label behaviors.
The addition of learning algorithms significantly expands the capability of intrusion detection systems, and blockchain-supported network security has also been recently explored as a way of securing UAV swarms. Blockchain is a peer-to-peer (P2P) distributed ledger that is secure, transparent, and flexible. It can store data in a chain of blocks that are tamper-proof. Smart contracts can be developed on the chain to execute specific predefined actions. Blockchain has widespread use in security, finance, and government applications [126]. Blockchain technology is a viable solution to issues with UAV network security.
Current UAV softwarization techniques are summarized in [122] such as the wide range of attacks on control, application, and data plane. Several proposed blockchain-based architectures are a comprehensive solution to these issues. Figure 7 demonstrates a simplified blockchain based method for securing low level swarms. A blockchain instance runs on a cloud and ground-based station. Every agent in the swarm has a hardcoded unique identifier. A state table with the agents and their identifiers is maintained by the blockchain and synced across the station nodes. Agents validate their existence at every iteration and the blockchain is updated accordingly. A spoofed agent with an identifier that is not present on the blockchain is unable to join the swarm, is denied communication services and is recognized immediately.
Integration benefits include communication data security and transparency in node transactions. However current blockchain technology has scaling and latency issues [127]. A proper framework choice is needed that fits the stochastic requirements of UAV swarms. The first step is the selection of an appropriate consensus algorithm for the blockchain itself. Fast consensus algorithms instead of proof of work are required. Article [53] recommends PBFT (practical byzantine fault tolerance) consensus that has a frequency of 500 Hz. Such higher frequencies can satisfy the intensive demands of routing policies, resource allocation, and mobility management in addition to deploying secure swarms. Article [122] in particular focuses on the security and privacy of communication links for UAVs via blockchain-supported softwarization architecture. By ensuring the authenticity of virtual machines in the virtual infrastructure, it is also capable of protecting against various security threats.
Software-defined networking (SDN) is a technique that offers configurations for network monitoring and performance. By separating control and data planes and providing intelligent control to network hardware, real-time dynamic decision-making is possible. SDN architecture features are described as vendor-neutral and agile [128]. Article [129] examines four areas where blockchain can efficiently secure system-communication, user authentication, device configuration, and legitimacy.
A blockchain-based SDN controller is capable of resisting several attacks that normally plague networked systems. It is possible to integrate fast chains as middleware between the control planes and infrastructure layers. Blockchain ledgers can be used to verify agents in a swarm as well, and a lightweight implementation can hold identifiers for all agents in the swarm. Any additional deployments are checked with values present in the blockchain. It would be difficult for malicious agents to gain access as only agents who are keyed into the blockchain will be allowed to be a part of the swarm. Applications such as those in [130] generate a blockchain receipt for each data record that a drone stores in a traditional cloud server. Labeled as “DroneChain”, drone data uploads are captured as a blockchain transaction and hashed. Such developments are easier to deploy as they can be readily integrated with traditionally available services, such as the cloud, merely by adding an additional layer of authentication to data that already had an established pathway. Usage of Drones as a Service (DaaS) is also prevalent. Package delivery services are being explored where package status and tracking data are available on a blockchain [131]. Passive tags on customer endpoints verify packages being dropped in mailboxes. Since these records cannot be tampered with, denying that a package was received is difficult. Package tracking information is available to both the customer and package sender for transparency.
Some interoperability issues with blockchain integrations do exist though. The blockchain needs to work on network hardware that is often vendor specific and may not support it [122]. Data latency issues exist due to a lack of efficient optimization protocols between network routing and coverage protocols interacting with blockchain-provided data sources. Computational complexity may increase due to actions such as validation and block mining. Additional research and testbeds are needed to refine proposed solutions into real-time deployments.
2.5. Resource and Task Handling
Resource allocation and task assignment are terms used by some researchers interchangeably. This is based on the premise that once a task is assigned to an agent or a group of agents, their resources will be locked during the duration of task completion or until a dynamic change is required in the decision-making capacity of the task assignment module. However, not all studies incorporate higher levels into task assignments. The assumption is that each agent in the swarm is a resource that is assigned to complete a particular task. The problem is an interaction between resources and the environment, whereas the allocation scheme is an incentivized function for the agents.
2.5.1. Task Assignment
UAV task assignment is an optimization problem [132]. It is needed to improve computational efficiency and to provide faster solutions. Bio-inspired algorithms such as the wolf pack algorithm (WPA) have been studied in great detail due to their success in reaching optimal solutions at lower time rates [101,103,133]. In a general wolf pack algorithm, each swarm is divided into subgroups that have freedom of evolution and emergent behavior. Sub-swarm interactions are allowed. Common parameters include maximum iterations, population size, and the number of subpopulations. After the initial population solution is created, the fitness function evaluates it before creating the subpopulations. These act independently to create solutions until the termination condition, which is when the best solution is selected from the set of candidate solutions.
Article [133] proposes a modified wolf pack algorithm called the multi-population parallel wolf pack algorithm that performed better than traditional implementations. Their proposed solution allows the creation of virtual sub-populations that are created on the existing layer. This is constructed of the best-derived agents from the overall subpopulation and does not change until the migration stage. Every iteration first optimizes the virtual group and then proceeds to the actual populations. The individuals of this virtual layer are distributed among the actual population and help in accelerated convergence of optimal solutions. Results showed that up to a certain threshold, the simulations with more subpopulations reached convergence faster than those with fewer subpopulations in a general scenario. Improved performance was observed over the genetic algorithm and generic wolf pack.
The wolf pack algorithm formulated in [132] dynamically changes leaders based on certain criteria. This can be scaled to UAV agents to examine the level of computational resources being used by each agent in the swarm at a given moment, and the agent with the most resources available is selected as the leader. In the case that the swarm has a fixed hierarchy, instead of leader shifting, additional tasks can be assigned to the selected agent to create a swarm-wide balance.
Efficient task allocation can allow simple agents to accomplish relatively complex tasks. However, the task allocation problem (TAP) is nonlinear, multi-modal, and highly adversarial. Selecting the right agent to perform a task in the instantaneous decision process is a challenge. Task assignment and resource allocation are interchangeable in terms of usage and considerations for researchers. Task allocation solving algorithms can be centralized or distributed. Bio-inspired algorithms are centrally distributed and include wolf pack, ant colony, and particle swarm optimization. However, they are known to be computationally intensive particularly when the number of agents increases, and they also show poor performance in dynamic environments [134].
Distributed algorithms are top-down and bottom approaches. Top-down approaches decompose problems into smaller optimization problems and solve them using cooperation schemes among multiple contributors. The study uses a fixed response threshold model based on ant colony labor division. It addresses how individual agents determine that a task needs to be performed and how the swarm as a whole exhibits functionality based on different tasks with varying complexities.
Each agent has individual capabilities and a response threshold to tasks. Each task has a stimulus that motivates agents to take the task. Once the task stimuli cross the agent threshold, the agent begins the task. If an agent stops the task, the task priority increases, thus increasing the environmental stimuli.
Article [135] summarize the similarity between ants and a group of UAVs performing tasks. Because of the similarity in their distributed command structure, FRT models are ideal for implementation in UAVs encouraging emergency biological swarm behavior that performs tasks efficiently. Like other bio-inspired algorithms, PSO is also a good candidate to use for task assignments. Article [136] improves on it to overcome the deficits of the original PSO method as it can only be used for continuous space optimization. The improved PSO algorithm divides the swarm into overlapping subgroups. Each particle corresponds to an agent UAV. The second dimension is the number of tasks that are assigned to the swarm. A fitness function is created to evaluate the particles and reach the local solution. These steps are repeated until a termination stage is reached or the max iteration number is reached. However, the number of tasks cannot be assumed as constant. Actual task assignment problems are evolutionary. Factors such as fuel constraints, threats, and mobility have to be considered. These may vary across situations thereby varying the assignment too.
In cases where ground station services are readily available for swarms, the stations can have their strategies for task allocation in addition to decision models on the agents themselves. Both work in coordination to assign and select tasks. Cooperation frameworks combine them to provide efficient task servicing. Implementations such as [137] integrate multi-layered decision models for tasks. These models consider base station capacities to expand drone task maps from onboard to ground control.
Station strategies are examined such as round robin that distributes tasks cyclical to available agents. However, such a simplified strategy may have offsets in agents returning task results as well as bottlenecks in task queuing. Complex decision models consider multiple parameters before an allocation is made. Agent status strategy examines the well-being of an agent in terms of remaining fuel, network strength and proximity to other agents, and ground control before assigning a task.
Article [137] relies on the agent’s ability to handle requests. One is distance-based and the other is reward-based. Common factors in both to be considered are agent battery life, the distance between client and drone (in delivery to client specific scenario), and environmental factors such as visibility and pressure. In tasks that deal with delivery to client scenarios such as in [137], the drone can be in either one of the four states: at the station, on route to the client, serving the client, or back at the station.
2.5.2. Resource Allocation
The allocation problem balances shared resources among a group of swarm agents. Each task that a swarm carries out such as path planning, target detection, or surveillance, requires a combination of onboard and ground control resources and computation time. Inefficient task queuing can result in bottlenecks and delays that may damage sensitive operational parameters such as target detection within a particular time frame or instantaneous formation reconfiguration. Multiple functional hardware elements can be combined to make modules that combine capability as well as attempt to solve the resource allocation problem. A novel system proposed in [138] provides a radar module for communication and target detection. It also attempts to solve the resource availability problem in UAVs using a learning-based method to optimize resources. The input parameters are channel, power, and beam resource. A reward scheme is provided to incentivize agents when they select a particular resource, thereby freeing up other resources. Application-specific scenarios such as the one used in [139] examine offloading of computation-intensive tasks to and from edge computing servers. UAVs are used to provide flexible computing services, where such a process can be used to offload intensive UAV tasks such as image processing and target detection in videos to centralized facilities rather than being processed on board.
2.6. Agent Property
The agent property component focuses on individual agents in the swarm. It is possible to increase overall swarm performance by modifying individual agent capabilities [140,141]. The easiest way to do this is to introduce swarm heterogeneity. Heterogeneity is defined as components of a system that are of dissimilar composition or properties. Heterogeneity may be imbibed in a multi-agent system by using a variety of features. The following studies focus on performance effects on a mission by the inclusion of heterogenous agents in a previously homogenous swarm [140,141,142]. There is a marked increase in performance observed by the introduction of varied agents. This performance might be in terms of time taken to complete tasks or an increase in another measurement metric used to measure swarm resilience. Our previous research provides a classification system for swarms labeled as heterogeneous:
- By operational space of agents
- By nature of agents
- By hardware of agents
In addition to aerial spaces, other varied operational spaces for the unmanned vehicle in a swarm may include ground surfaces, water surfaces, underwater, or even underground. Article [4] deploys a heterogenous team in an enclosed environment. The team comprises robots classified as heterogenous by their operational space—an UGV and an UAV. The authors mention how each vehicle brings different capabilities to the swarm. The UGV is autonomous whereas the UAV is fast and provides greater motion flexibility. The UAV can fly over obstacles that the UGV cannot cross. Challenges to the deployment of such hybrid swarms are also mentioned. Air ground coordination and navigation are the primary challenges. Deployment of such swarms is not limited to enclosed environments only. Indeed, a wider operational space is available by the inclusion of agents on the ground, water surfaces, or even at different altitudes in the air. Current deployments of heterogenous agents have shown a marked increase in resilient behavior [140,141,142]. Such swarms can be single or multi-space or heterogonous by nature or have hardware capability. In pursuit–evader situations, the pursuit UAV often needs to be agile and lightweight to be capable of faster flight speeds than the target UAV. However, a swarm that features a mix of lightweight pursuit-capable agents along with heavier support agents that carry additional equipment needed to support swarm operations is ideal. A military purpose swarm such as the one in [143] where a mix of differently capable agents is used can be used. Moreover, experiments by [141] observed a marked increase in swarm responsiveness to external stimuli due to the inclusion of fast agents in swarms. Benefits are observed across the whole range of UAV swarm components. A hierarchical structure of mixed agents described by [144] includes high-altitude fixed-wing aircraft providing communication and sensing support to a group of low-altitude quadcopters. They also note a difference in computational resources, energy consumption, and communication systems among the agents. The possibility of evolving capabilities among heterogeneous swarms has also been observed. Implementing a different characteristic trait by modifying operational parameters can change the way homogenous agents behave thereby allowing them to function better. A change in the allowable range that some swarm agents can move from a fixed ground target can allow them to become less cautious of external disruptions, thereby exhibiting different behavior. A coordination scheme by other non-modified agents to balance tasks and resources is observed in such scenarios. The addition of differently capable agents can also provide complementary capabilities [145]. Homogenous agents in a swarm may have a particular weakness that may easily bring the whole swarm down. Such issues can be varied such as bugs in the control system or routing protocols, detection and tracking, or communication range. Such issues can be solved by introducing agents that might fix such gaps in the overall swarm properties. For example, a relay drone that possesses extra hardware to support multiple communication bands can aid in communication gaps and delays. A similar deployment is described in [146], where some robots in the group have higher sensor payload, processing power, and memory capacity. These are labelled as leader robots, whereas child robots have more limited resources. These child robots rely on leader robots for tasks such as localization. Data from the child robots can be used for sensor fusion, global pose, and location estimation, which can then be used to modify the swarm movement. The proposed distributed leader-assisted localization algorithm can provide accurate localizations for child robots even when they are beyond the sensing range of leader agents.
Application-specific improvements such as those in [145] show how a richer dataset is created when a micro aerial vehicle (MAV) collaborates with an UGV in the creation of detailed maps. The MAV recorded the top view dimensions whereas the UGV accounted for the side view spread. Added considerations for implementation need to be accounted for in this type of scenario though. Figure 8 shows how an UAV-UGV coordination can produce higher detailed maps. The UGV maps the ground level dimensions while the UAV maps the top view.
A study by [147] mentions how most current mission planning and control strategies are for homogenous systems primarily. The added dynamics for different operational spaces that the hetero swarm will be exposed to must be considered. For example, an UAV-UWSV swarm needs to consider air and water environments to accommodate all vehicles. Agent support and coordination protocols need to be updated as well. Marsupial platforms such as [148] use water surface vehicles to recover and recharge UAVs.
Cooperative coevolution algorithms that support the evolution of heterogenous systems suffer from scalability issues. This can be overcome by creating partially heterogeneous systems called hybrid systems where groups of homogenous subswarms are present. Each subswarm has identical controllers. By controlling the agents that need to be evolved, the learning scheme improves scalability [149]. The inclusion of heterogeneous agents is sometimes considered no more than just an upgrade to existing swarms, but it is a necessity to aid in the development and evolution of resilient behavior in multi-agent systems. Despite the more challenging implementation considerations and a change in development pipelines, the possible benefits are significant.
2.7. Resiliency Evaluation
Cyber-physical systems need testbeds for simulations before real-world deployments. However, due to the extreme software-hardware interdependence, designing them is a challenging task. UAV swarms are among those systems that require thorough testing but are difficult to test in controlled environments. Simulations cannot mimic the varied and extreme variables they might face [150]. Resiliency assessment is a process of observing and evaluating the resilient behavior of UAV swarms to disruptions. An evaluation metric system is needed to accurately recognize performance and its lack thereof. It is important to devise feedback systems and metrics to measure resilience performance in the above modules. Real-time feedback loops may allow decision-making models to follow an iterative process in creating better outputs. Metrics created to evaluate system components such as signal strength, target detection times based on varied inputs, and fuel saved based on optimized path planning can provide insights and recognize tradeoffs.
Evaluation metric design is a less explored branch. It is a strategic process for evaluating multi-pronged decision models by measuring individual decision branches and quantifying their outputs into a single value. Article [151] cites a flaw in the creation of resilience evaluation metrics. Metrics often use the initial swarm performance as a baseline. This may not be accurate, as certain onboard systems may need more time to exhibit full performance capacity. The approach by [151] introduces variables that provide free space for missions. By relaxing the condition that the swarm has to return to performance before it is attacked, the authors argue that a flexible baseline that determines whether a system is performing is needed. The swarm may have to take certain actions during the attack process such as sacrificing a certain agent or reducing the number of agents assigned to cover an area after an attack takes place. Article [151] lays out preliminary dynamic evaluation parameters.
The second problem is that these metrics often use network connectivity as a basis of evaluation. As long as the swarm maintains a connected state in terms of its required signal strength or coverage, the swarm is deemed resilient. However, the presence or absence of network and communication capabilities alone cannot determine the robustness of swarms. Time values for the recovery process should also be measured. For example, in the case of an attack scenario on a swarm described by [151], there are a few issues that the article does not take into account:
- The swarm does not check for agent wellbeing after it determines that the attack has ended.
- In the case that an agent is lost, there are no search and recovery procedures.
- Mission progress may be lost when swarm control completes task re-assignment. In this case, depending upon the scenario tasks such as localization, area decomposition and data collection may need to be restarted after the loss of data is examined.
A basic evaluation metric is the one proposed by [152] which measures performance loss after a disruption with the time it takes for the system to return to normal levels. This creates a baseline through which preliminary system performance can be maintained. Additional application-specific constraints can be established. On the occasion that an agent is lost, the time taken for the mayday signal of the agent to reach central command can be measured along with the time it takes for other agents to locate the lost agent and deploy rescue procedures. A secondary decision process is started where probability models determine if it is safe to try and locate the lost agent or proceed with the task. If the decision to proceed is made, the model then decides if additional agents should be deployed to make up for lost agents or if task reassignment should distribute the workload to other agents. The fundamental metric here is the time value which is measured for every decision to be executed. Multiple time values can be fed into a measurement model to produce one time-based value of system performance.
Article [13] represents resiliency heuristics that are important building blocks of evaluation metrics. Additionally, they note how heuristics complement each other, with some becoming increasingly efficient if others are present. They define these heuristics as a “function of the type of disruption, the type of system being architected, and the type of resilience needed”. These heuristics act as a support framework for action statements that can be framed for specific measurements. For UAV swarm systems, they can be collision avoidance, localization and navigation, and fuel discharge rates.
The types defined by them can also help program system responses to a particular disruption. For example, in case an agent fails, additional agents should be on standby to take over the task. Simulation using metrics should be all-encompassing. Researchers develop fast algorithms for changes in swarm formation such as in [60] where computationally efficient algorithms for coverage and flocking are developed. However, their robustness test fails to consider scenarios where additional agents are added to the swarm to make up for lost agents due to disruptions, thereby changing the number of active agents in the swarm. A time-based metric that measures system reaction to the coverage problem is ideal in this case. Accident model metrics such as in [153] can lead to new insights into operational tradeoffs. Section 2.1.1 mentions one such balance between coverage and connectivity. A “slider” metric designed into control algorithms can add autonomy in decisions related to the same processes. Article [13] mentions how such tradeoffs can be recognized. The measurement framework they present is comprehensive and accurately summarizes resiliency metrics into time and cost functions. Additionally, integration into system design must be completed. A time metric that measures the amount of time it takes for an UAV swarm to recover from an attack should have feedback from agents that were affected. If the agent assures its wellbeing, the time measured should be reconfiguration time only. If the agent is unresponsive, the time measured should be the total of reconfiguration plus the time it takes for an additional agent to be deployed from the base. This can be an indication measurement of the adaptability of the system.
Application-specific descriptive metrics are usually designed by researchers to evaluate their respective research. For example, path planning and collision avoidance [18] have metrics such as route length, number of crashes, and frequency of route regeneration. Such metrics scale well in terms of interoperability. However, some specific metrics might not scale due to features being absent in other the research domains being compared. Learning-based systems have different evaluation criteria than game theoretic methods. Similarly, resilient methods for evolutionary algorithms cannot be compared with routing protocols that make static assumptions during the planning stage. If the metric for resilience evolution is based purely on performance over time, let p(t) be the desired performance when no disruptions exist. When a disruption occurs in time td, the performance function reduces to p(tr). Recovery rate is defined as the amount of time taken for the performance function to go back to the original level. Methods to measure the resiliency of interdependent systems based on time and performance scales have been proposed [154]. A comparison metric that compares system data before and after a disruption takes place is also required. A survey conducted by [155] in 2019 shows the lack of research for applying metrics in UAV swarm resiliency. They suggest the development of a metric that reflects differences between performance after a single disruption event compared to the expected performance in the absence of disruptions.
Current metrics are not suitable for decision-making when it comes to completing a mission. The ability to compare current swarm performance with standard performance is missing [155]. This can help decide if the mission should be continued, put on hold, or aborted completely. Article [155] also highlights the necessity of a resilience metric by citing reasons similar to those mentioned in this section. It recognizes shortcomings in current studies and proposes a resilience evaluation method for UAV agents due to external malicious disruptions. Essentially this can be labeled as a network-based approach to measuring UAV swarm security because it does not consider the failure of nodes due to malfunctions other than an attack. However, there are a multitude of reasons that a node can fail other than an attack. There can be failures of agents in areas where they are not under threat from external enemy agents. Such failures include collision with obstacles, other agents and fuel, and communication issues.
The framework described in [156] considers only the number of swarm agents available at a given moment in time due to an attack. Current position, speed, fuel, and availability of secure resources are taken as inputs. The verification engine labels vulnerable agents and herds other agents to safety. Considering a wide range of inputs can substantially improve the accuracy of solvers to label threats as they see them, however, there is an increase in computational time taken to reach this decision. Furthermore, the sacrifice of several agents should be considered. Depending on hardware and location, agents may be difficult to replace and it may be an expensive process without some recovery plans in place.
Similar to the need for dynamic programming in swarm operations, a flexible resilience assessment is beneficial. One such approach is used by [157], where dynamic assessments do not use a fixed set of metrics. Rather, the evaluation parameters change depending on mission progress across the timeline. Article [157] divides the process into four parts, namely, to determine the mission objective, select evaluation attributes, propose an evaluation method, and obtain results. Known parameters of the mission and environment are collected in the first stage. Predefined evaluation attributes for the collected data are selected. These attributes are added to a dynamic resilience method as constraints for the problem. Evaluation results are obtained which can then be used as a frame of reference for simulations and actual flights. The dynamic resilience method dictates that the selected evaluation attributes determine the evaluation methods. Here the goal is to preserve original data when doing so. Different attribute selections will result in a varied method and thereby different results.
Analysis of mobility model performance impacts on mobile ad-hoc networks has been proposed by researchers in as early as 2015 [158]. They mention the need for an accurate evaluation of how mobility models affect routing protocol performance. Correctly deduced, any conclusions drawn on performance based on simulations developed and measured using incorrectly developed metrics will lead to errors. Metrics for the mobility models described are network diameter, the average number of components, average coverage, and average path length. Routing protocol metrics include end-to-end delay and routing overheads. While naming conventions across research might be different, for network and routing, an essential idea of network health needs to be developed. This can be deduced from the number of individual nodes in the swarm. Each node is an UAV agent that is actively participating in swarm activities. Path lengths are measured and compared, and the success rate and time of delivery for a data packet following each path should be noted. For network coverage, signal strengths at proposed network diameters should be measured for expected versus actual values.
3. Open Issues and Future Research Directions
This section addresses current open issues and future research directions related to UAV swarm resiliency. Swarm dynamics are expected to further evolve with advancements in the field of UAVs as well as their associated peripheral equipment. Future developments may resolve some of the issues that are prevalent in current swarm deployments, whereas new issues may emerge.
With the gradual implementation of networks beyond 5G, the inherent ability to communication may upgrade UAV swarm networks in a manner that they are more efficient and secure. 6G networks are envisioned to address issues in node-based networks such as latency, power usage, and transmission quality. Upgrades to infrastructure such as the non-terrestrial components for 6G networks can aid UAV communications as well as make use of UAV swarms to aid in further extending the range and strength of available communication facilities [159]. These upgrades may naturally apply to any devices that use the new protocols as well, with sectors such as UAV swarms benefitting greatly.
Other techniques being explored such as the use of ground-mounted lasers to recharge UAV agent batteries or wireless power transfer methods [36] may solve the low power issue that is present in almost all small- to medium-scale unmanned aerial platforms. Future exploratory studies are needed to know how improvements in such high-priority areas may improve resiliency in swarms. Exploration of UAV swarms for application-specific purposes can also lead to greater insights into UAV swarm resiliency needs and solutions. UAV swarms have huge potential applications in surveillance, disaster management, remote sensing, SAR, agriculture, and ecology monitoring, thus novel applications envisioned for UAV swarms may open up further resiliency requirements for the swarms expected to work in those environments.
Similarities exist between collision and obstacle avoidance in their interchangeability and merging. However, these two issues need to be examined independently by focusing on their definitions. While collision avoidance focuses on maintaining a safe distance between swarm agents, obstacle avoidance deals with mechanisms to avoid in-path static and dynamic obstacles. A similar research gap was noted in swarm coverage in terms of network and area coverages. While this study addresses the coverage of operational space separately into area coverage and network coverage, most other investigations do not. While network coverage addresses the positioning of agents in an operational space such that they maintain a standard connection strength at all times, area coverage focuses on distributing swarm agents to cover the maximum area while making assumptions about communication capacity [48]. The coverage type is often selected depending on the application-specific uses of the swarm, however, resilient measures are needed in both. Certain methods are being developed for UAV swarm network security leading to improved resiliency. SDN and blockchain to secure UAV networks are still in the nascent phase and under research or in the simulation phase. SDN has been widely applied to fixed networks, but it has challenges when being implemented in MANETS and FANETS [53]. Routing protocols continue to improve in dealing with the issue of intermittent connections due to frequent changes in network topology [9]. Dispersed research for resilience engineering for various modules in UAV swarms might be effective for particular scenarios, however, it might be difficult to merge with other modules that are a part of a different study. For example, it is not easy to combine resilient routing protocols with counter-defense mechanisms for physical agent safety against external malicious agents.
Every resiliency integration has potential weaknesses. Blockchain has issues with deployment and latency, whereas multiple decision process models for path planning, navigation, and obstacle avoidance have computational cost and delay problems. There is a development need for comprehensive testbeds and simulators for the testing of multiple resilient framework interactions with each other. Current simulators have hardware or software limitations, lack features, or face interfacing issues [150]. There is also a gap between developed protocols and the availability of synthetic data to test them on. All of these problems need to be addressed before a truly resilient swarm can be created.
4. Discussion and Conclusions
This study presents a systemic breakdown of UAV swarm components that affect overall swarm resilience and discusses current research trends. Although previous studies and experiments have attempted to address major challenges in UAV swarm research, there are still prevailing problems that warrant future research before swarms can be considered truly resilient. A general trend is observed where researchers often focus on one facet of UAV development to create resilient behavior but neglect the rest. Integrating multiple such developments is a novel challenge. Thirty percent of the research examined mentioned that one or more components of swarm resiliency research was beyond the scope of their study. Researchers often fail to consider all disruptions that might affect their swarm implementations, choosing to focus on only some instead. This makes system behavior unpredictable to unanticipated disturbances. Additionally, the lack of standard resiliency evaluation metrics makes it difficult to compare system performance across varied implementations. Multiple studies do not accurately design feedback systems in place. UAV swarm applications are increasing rapidly. Performance efficiency and reduction in mission completion time are two major factors that promote multi-agent systems. Heterogeneous agent swarms acting in multiple operational spaces, (UAV-UGV, UAV-UWSV), etc., further increase the scope of applications. This recognizes the need for a comprehensive resilient swarm solution that is built from the ground up while taking into consideration all of the components discussed above. This study creates an identification and classification taxonomy for components vital to UAV swarm operations. Analysis of the current literature gave insights into the research focuses over the years, as well as current trends in publishing. Research gaps in the current implementations of resiliency in UAV swarms are identified and set the groundwork for future work toward building resilient swarms.
Author Contributions
Conceptualization, A.P. and F.A.M.; investigation, A.P.; original draft preparation, A.P.; review and editing, A.P. and F.A.M. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
Data sharing not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
| ABS | Aerial Base Station |
| BSA | Backtracking Search Algorithm |
| CNS | Communication, Navigation, Surveillance |
| DTRP | Dynamic Topology Reconstruction Protocol |
| DaaS | Drones as a Service |
| FANET | Flying Ad Hoc Networks |
| FOA | Fruit fly Optimization Algorithm |
| GNSS | Global Navigation Satellite System |
| IDS | Intrusion Detection System |
| IMU | Inertial Measurement Unit |
| MANET | Mobile Ad hoc Network |
| MAS | Multi Agent system |
| MUSCOP | Mission based UAV Swarm Coordination Protocol |
| MAV | Micro Aerial Vehicle |
| MBCAP | Mission Based Collision Avoidance Protocol |
| PAMTS | Profit Driven Adaptive Moving Target Search |
| PSO | Particle Swarm Optimization |
| P2P | Peer to Peer |
| PBFT | Practical Byzantine Fault Tolerance |
| QR | Quick Response |
| RSSI | Received Signal Strength Indication |
| ROI | Region of Interest |
| SAI | Surveillance Area Importance |
| SINR | Signal to Interference plus Noise Ratio |
| SAR | Search and Rescue |
| SDN | Software Defined Networking |
| TAP | Task Allocation Protocol |
| UAV | Unmanned Aerial Vehicle |
| UWSV | Unmanned Water Surface Vehicle |
| UGV | Unmanned Ground Vehicle |
| VANET | Vehicular Ad Hoc Network |
| WPA | Wolf Pack Algorithm |
References
- Rubio, F.; Valero, F.; Llopis-Albert, C. A review of mobile robots: Concepts, methods, theoretical framework, and applications. Int. J. Adv. Robot. Syst. 2019, 16, 172988141983959. [Google Scholar] [CrossRef] [Green Version]
- Santa Ana, R. Drones Survey Waning Red Tide. Available online: https://agrilifetoday.tamu.edu/2015/10/22/drones-survey-waning-red-tide-at-south-padre-island/ (accessed on 8 October 2022).
- Rieucau, G.; Kiszka, J.J.; Castillo, J.C.; Mourier, J.; Boswell, K.M.; Heithaus, M.R. Using unmanned aerial vehicle (UAV) surveys and image analysis in the study of large surface-associated marine species: A case study on reef sharks Carcharhinus melanopterus shoaling behaviour. J. Fish Biol. 2018, 93, 119–127. [Google Scholar] [CrossRef]
- Roldán, J.; Garcia-Aunon, P.; Garzón, M.; de León, J.; del Cerro, J.; Barrientos, A. Heterogeneous Multi-Robot System for Mapping Environmental Variables of Greenhouses. Sensors 2016, 16, 1018. [Google Scholar] [CrossRef] [Green Version]
- Tsouros, D.C.; Bibi, S.; Sarigiannidis, P.G. A Review on UAV-Based Applications for Precision Agriculture. Information 2019, 10, 349. [Google Scholar] [CrossRef] [Green Version]
- Anderson, K.; Gaston, K.J. Lightweight unmanned aerial vehicles will revolutionize spatial ecology. Front. Ecol. Environ. 2013, 11, 138–146. [Google Scholar] [CrossRef] [Green Version]
- Vincent, P.; Rubin, I. A Framework and Analysis for Cooperative Search Using UAV Swarms. In Proceedings of the 2004 ACM Symposium on Applied Computing (SAC ’04), Nicosia, Cyprus, 14–17 March 2004; Association for Computing Machinery: New York, NY, USA, 2004; pp. 79–86. [Google Scholar]
- Aljehani, M.; Inoue, M. Multi-UAV tracking and scanning systems in M2M communication for disaster response. In Proceedings of the 2016 IEEE 5th Global Conference on Consumer Electronics, Kyoto, Japan, 11–14 October 2016; IEEE: New York, NY, USA, 2016; pp. 1–2. [Google Scholar]
- Arafat, M.Y.; Moh, S. Routing Protocols for Unmanned Aerial Vehicle Networks: A Survey. IEEE Access 2019, 7, 99694–99720. [Google Scholar] [CrossRef]
- Isufaj, R.; Omeri, M.; Piera, M.A. Multi-UAV Conflict Resolution with Graph Convolutional Reinforcement Learning. Appl. Sci. 2022, 12, 610. [Google Scholar] [CrossRef]
- Woods, D.D. Four concepts for resilience and the implications for the future of resilience engineering. Spec. Issue Resil. Eng. 2015, 141, 5–9. [Google Scholar] [CrossRef]
- Mian, S.; Hill, J.; Mao, Z.-H. Optimal Control Techniques for Heterogeneous UAV Swarms. In Proceedings of the 2020 IEEE/AIAA 39th Digital Avionics Systems Conference (DASC), San Antonio, TX, USA, 11–15 October 2020; IEEE: New York, NY, USA, 2020; pp. 1–10. [Google Scholar]
- Madni, A.M.; Jackson, S. Towards a Conceptual Framework for Resilience Engineering. IEEE Syst. J. 2009, 3, 181–191. [Google Scholar] [CrossRef]
- Wears, R.L. Resilience Engineering: Concepts and Precepts. BMJ Qual. Saf. 2006, 15, 447–448. [Google Scholar] [CrossRef]
- Madni, A. Designing for resilience. In ISTI Lecture Notes on Advanced Topics in Systems Engineering; ISTI: Tokyo, Japan, 2007; pp. 20–35. [Google Scholar]
- Ron, W.; Hollnagel, E.; Woods, D.; Leveson, N. A typology of resilience situations. In Resilience Engineering: Concepts and Precepts; CRC Press: Boca Raton, FL, USA, 2006. [Google Scholar]
- Wolpert, D.H.; Macready, W.G. No free lunch theorems for optimization. IEEE Trans. Evol. Comput. 1997, 1, 67–82. [Google Scholar] [CrossRef] [Green Version]
- Majd, A.; Ashraf, A.; Troubitsyna, E.; Daneshtalab, M. Using Optimization, Learning, and Drone Reflexes to Maximize Safety of Swarms of Drones. In Proceedings of the 2018 IEEE Congress on Evolutionary Computation (CEC), Rio de Janeiro, Brazil, 8–13 July 2018; IEEE: New York, NY, USA, 2018; pp. 1–8. [Google Scholar]
- Macek, K.; Vasquez, D.; Fraichard, T.; Siegwart, R. Safe Vehicle Navigation in Dynamic Urban Scenarios. In Proceedings of the 2008 11th International IEEE Conference on Intelligent Transportation Systems, Beijing, China, 12–15 October 2008; IEEE: New York, NY, USA, 2008; pp. 482–489. [Google Scholar]
- Cooley, R.; Wolf, S.; Borowczak, M. Secure and Decentralized Swarm Behavior with Autonomous Agents for Smart Cities. In Proceedings of the 2018 IEEE International Smart Cities Conference (ISC2), Kansas City, MO, USA, 16–19 September 2018; IEEE: New York, NY, USA, 2018; pp. 1–8. [Google Scholar]
- Andrade, F.A.A.; Hovenburg, A.; de Lima, L.N.d.; Rodin, C.D.; Johansen, T.A.; Storvold, R.; Correia, C.A.M.; Haddad, D.B. Autonomous Unmanned Aerial Vehicles in Search and Rescue Missions Using Real-Time Cooperative Model Predictive Control. Sensors 2019, 19, 4067. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Qi, N.; Yao, W.; Zhao, J.; Xu, S. Cooperative Path Planning for Aerial Recovery of a UAV Swarm Using Genetic Algorithm and Homotopic Approach. Appl. Sci. 2020, 10, 4154. [Google Scholar] [CrossRef]
- Chen, X.; Tang, J.; Lao, S. Review of Unmanned Aerial Vehicle Swarm Communication Architectures and Routing Protocols. Appl. Sci. 2020, 10, 3661. [Google Scholar] [CrossRef]
- Berger, J.; Lo, N.; Barkaoui, M. Static target search path planning optimization with heterogeneous agents. Ann. Oper. Res. 2016, 244, 295–312. [Google Scholar] [CrossRef]
- Besada, J.A.; Bernardos, A.M.; Bergesio, L.; Vaquero, D.; Campana, I.; Casar, J.R. Drones-as-a-service: A management architecture to provide mission planning, resource brokerage and operation support for fleets of drones. In Proceedings of the 2019 IEEE International Conference on Pervasive Computing and Communications Workshops (PerCom Workshops), Kyoto, Japan, 11–15 March 2019; IEEE: New York, NY, USA, 2019; pp. 931–936. [Google Scholar]
- Dimensions. Available online: https://www.dimensions.ai/ (accessed on 19 October 2022).
- Tahir, A.; Böling, J.; Haghbayan, M.-H.; Toivonen, H.T.; Plosila, J. Swarms of Unmanned Aerial Vehicles—A Survey. J. Ind. Inf. Integr. 2019, 16, 100106. [Google Scholar] [CrossRef]
- Bithas, P.S.; Michailidis, E.T.; Nomikos, N.; Vouyioukas, D.; Kanatas, A.G. A Survey on Machine-Learning Techniques for UAV-Based Communications. Sensors 2019, 19, 5170. [Google Scholar] [CrossRef] [Green Version]
- Schranz, M.; Umlauft, M.; Sende, M.; Elmenreich, W. Swarm Robotic Behaviors and Current Applications. Front. Robot. AI 2020, 7, 36. [Google Scholar] [CrossRef] [Green Version]
- Nawaz, H.; Ali, H.M.; Laghari, A.A. UAV Communication Networks Issues: A Review. Arch. Comput. Methods Eng. 2021, 28, 1349–1369. [Google Scholar] [CrossRef]
- Sun, W.; Tang, M.; Zhang, L.; Huo, Z.; Shu, L. A Survey of Using Swarm Intelligence Algorithms in IoT. Sensors 2020, 20, 1420. [Google Scholar] [CrossRef]
- Zhou, Y.; Rao, B.; Wang, W. UAV Swarm Intelligence: Recent Advances and Future Trends. IEEE Access 2020, 8, 183856–183878. [Google Scholar] [CrossRef]
- Sharma, A.; Shoval, S.; Sharma, A.; Pandey, J.K. Path Planning for Multiple Targets Interception by the Swarm of UAVs based on Swarm Intelligence Algorithms: A Review. IETE Tech. Rev. 2022, 39, 675–697. [Google Scholar] [CrossRef]
- Peng, Q.; Wu, H.; Xue, R. Review of Dynamic Task Allocation Methods for UAV Swarms Oriented to Ground Targets. Complex Syst. Model. Simul. 2021, 1, 163–175. [Google Scholar] [CrossRef]
- Rovira-Sugranes, A.; Razi, A.; Afghah, F.; Chakareski, J. A review of AI-enabled routing protocols for UAV networks: Trends, challenges, and future outlook. Ad Hoc Netw. 2022, 130, 102790. [Google Scholar] [CrossRef]
- Mohsan, S.A.H.; Khan, M.A.; Noor, F.; Ullah, I.; Alsharif, M.H. Towards the Unmanned Aerial Vehicles (UAVs): A Comprehensive Review. Drones 2022, 6, 147. [Google Scholar] [CrossRef]
- Campion, M.; Ranganathan, P.; Faruque, S. UAV swarm communication and control architectures: A review. J. Unmanned Veh. Syst. 2019, 7, 93–106. [Google Scholar] [CrossRef]
- Puente-Castro, A.; Rivero, D.; Pazos, A.; Fernandez-Blanco, E. A review of artificial intelligence applied to path planning in UAV swarms. Neural Comput. Appl. 2022, 34, 153–170. [Google Scholar] [CrossRef]
- Tang, J.; Duan, H.; Lao, S. Swarm intelligence algorithms for multiple unmanned aerial vehicles collaboration: A comprehensive review. Artif. Intell. Rev. 2022. [Google Scholar] [CrossRef]
- Suo, W.; Wang, M.; Zhang, D.; Qu, Z.; Yu, L. Formation Control Technology of Fixed-Wing UAV Swarm Based on Distributed Ad Hoc Network. Appl. Sci. 2022, 12, 535. [Google Scholar] [CrossRef]
- Celtek, S.A.; Durdu, A.; Kurnaz, E. Design and Simulation of the Hierarchical Tree Topology Based Wireless Drone Networks. In Proceedings of the 2018 International Conference on Artificial Intelligence and Data Processing (IDAP), Malatya, Turkey, 28–30 September 2018; IEEE: New York, NY, USA, 2018; pp. 1–5. [Google Scholar]
- Zhu, Q.; Zhou, R.; Zhang, J. Connectivity Maintenance Based on Multiple Relay UAVs Selection Scheme in Cooperative Surveillance. Appl. Sci. 2016, 7, 8. [Google Scholar] [CrossRef]
- Sahingoz, O.K. Mobile networking with UAVs: Opportunities and challenges. In Proceedings of the 2013 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 28–31 May 2013; IEEE: New York, NY, USA, 2013; pp. 933–941. [Google Scholar]
- Zhang, K.; Zhang, W.; Zeng, J.-Z. Preliminary Study of Routing and Date Integrity in Mobile Ad Hoc UAV Network. In Proceedings of the 2008 International Conference on Apperceiving Computing and Intelligence Analysis, Chengdu, China, 13–15 December 2008; IEEE: New York, NY, USA, 2008; pp. 347–350. [Google Scholar]
- Secinti, G.; Darian, P.B.; Canberk, B.; Chowdhury, K.R. Resilient end-to-end connectivity for software defined unmanned aerial vehicular networks. In Proceedings of the 2017 IEEE 28th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Montreal, QC, Canada, 8–13 October 2017; IEEE: New York, NY, USA, 2017; pp. 1–5. [Google Scholar]
- Peng, J.; Gao, H.; Liu, L.; Li, N.; Xu, X. TBM: An Efficient Trajectory-Based Multicast Routing Protocol for Sparse UAV networks. In Proceedings of the 2020 IEEE 22nd International Conference on High Performance Computing and Communications; IEEE 18th International Conference on Smart City; IEEE 6th International Conference on Data Science and Systems (HPCC/SmartCity/DSS), Yanuca Island, Cuvu, Fiji, 14–16 December 2020; IEEE: New York, NY, USA, 2020; pp. 867–872. [Google Scholar]
- Rosalie, M.; Brust, M.R.; Danoy, G.; Chaumette, S.; Bouvry, P. Coverage Optimization with Connectivity Preservation for UAV Swarms Applying Chaotic Dynamics. In Proceedings of the 2017 IEEE International Conference on Autonomic Computing (ICAC), Columbus, OH, USA, 17–21 July 2017; IEEE: New York, NY, USA, 2017; pp. 113–118. [Google Scholar]
- Yanmaz, E. Connectivity versus area coverage in unmanned aerial vehicle networks. In Proceedings of the 2012 IEEE International Conference on Communications (ICC), Ottawa, ON, Canada, 10–15 June 2012; IEEE: New York, NY, USA, 2012; pp. 719–723. [Google Scholar]
- Kaur, M.; Prashar, D.; Rashid, M.; Alshamrani, S.S.; AlGhamdi, A.S. A Novel Approach for Securing Nodes Using Two-Ray Model and Shadow Effects in Flying Ad-Hoc Network. Electronics 2021, 10, 3164. [Google Scholar] [CrossRef]
- Park, S.; Kim, H.T.; Kim, H. Energy-Efficient Topology Control for UAV Networks. Energies 2019, 12, 4523. [Google Scholar] [CrossRef] [Green Version]
- Aznar, F.; Pujol, M.; Rizo, R.; Pujol, F.; Rizo, C. Energy-Efficient Swarm Behavior for Indoor UAV Ad-Hoc Network Deployment. Symmetry 2018, 10, 632. [Google Scholar] [CrossRef] [Green Version]
- Stirling, T.; Floreano, D. Energy-Time Efficiency in Aerial Swarm Deployment. In Distributed Autonomous Robotic Systems: The 10th International Symposium, Proceedings of the 10th International Symposium on Distributed Autonomous Robotic Systems (DARS 2010), Lausanne, Switzerland, 1–3 November 2010; Martinoli, A., Mondada, F., Correll, N., Mermoud, G., Egerstedt, M., Hsieh, M.A., Parker, L.E., Støy, K., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; pp. 5–18. [Google Scholar]
- Hu, N.; Tian, Z.; Sun, Y.; Yin, L.; Zhao, B.; Du, X.; Guizani, N. Building Agile and Resilient UAV Networks Based on SDN and Blockchain. IEEE Netw. 2021, 35, 57–63. [Google Scholar] [CrossRef]
- Horvath, D.; Gazda, J.; Slapak, E.; Maksymyuk, T. Modeling and Analysis of Self-Organizing UAV-Assisted Mobile Networks with Dynamic On-Demand Deployment. Entropy 2019, 21, 1077. [Google Scholar] [CrossRef] [Green Version]
- Phadke, A.; Medrano, F.A.; Ustymenko, S. A Review of Vehicular Micro-Clouds. In Proceedings of the 2021 International Conference on Computational Science and Computational Intelligence (CSCI), Las Vegas, NV, USA, 15–17 December 2021; IEEE: New York, NY, USA, 2021; pp. 411–417. [Google Scholar]
- Hydher, H.; Jayakody, D.N.K.; Hemachandra, K.T.; Samarasinghe, T. Intelligent UAV Deployment for a Disaster-Resilient Wireless Network. Sensors 2020, 20, 6140. [Google Scholar] [CrossRef]
- Pu, C. Jamming-Resilient Multipath Routing Protocol for Flying Ad Hoc Networks. IEEE Access 2018, 6, 68472–68486. [Google Scholar] [CrossRef]
- Park, M.; Lee, S.; Lee, S. Dynamic Topology Reconstruction Protocol for UAV Swarm Networking. Symmetry 2020, 12, 1111. [Google Scholar] [CrossRef]
- Chen, R.; Xu, N.; Li, J. A Self-Organized Reciprocal Decision Approach for Sensing Coverage with Multi-UAV Swarms. Sensors 2018, 18, 1864. [Google Scholar] [CrossRef] [Green Version]
- Elmokadem, T.; Savkin, A.V. Computationally-Efficient Distributed Algorithms of Navigation of Teams of Autonomous UAVs for 3D Coverage and Flocking. Drones 2021, 5, 124. [Google Scholar] [CrossRef]
- Reynolds, C.W. Flocks, Herds and Schools: A Distributed Behavioral Model. SIGGRAPH Comput. Graph. 1987, 21, 25–34. [Google Scholar] [CrossRef] [Green Version]
- Acar, E.U.; Choset, H.; Rizzi, A.A.; Atkar, P.N.; Hull, D. Morse Decompositions for Coverage Tasks. Int. J. Robot. Res. 2002, 21, 331–344. [Google Scholar] [CrossRef]
- Choset, H.; Pignon, P. Coverage Path Planning: The Boustrophedon Cellular Decomposition. In Field and Service Robotics; Zelinsky, A., Ed.; Springer: London, UK, 1998; pp. 203–209. [Google Scholar]
- Huang, W.H. Optimal line-sweep-based decompositions for coverage algorithms. In Proceedings of the 2001 ICRA, IEEE International Conference on Robotics and Automation (Cat. No.01CH37164), Seoul, Korea, 21–26 May 2001; IEEE: New York, NY, USA, 2001; Volume 21, pp. 27–32. [Google Scholar]
- Gonzalez, E.; Alvarez, O.; Diaz, Y.; Parra, C.; Bustacara, C. BSA: A Complete Coverage Algorithm. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; IEEE: New York, NY, USA, 2005; pp. 2040–2044. [Google Scholar]
- Sun, Y.; Tan, Q.; Yan, C.; Chang, Y.; Xiang, X.; Zhou, H. Multi-UAV Coverage through Two-Step Auction in Dynamic Environments. Drones 2022, 6, 153. [Google Scholar] [CrossRef]
- Ahmed, N.; Pawase, C.J.; Chang, K. Distributed 3-D Path Planning for Multi-UAVs with Full Area Surveillance Based on Particle Swarm Optimization. Appl. Sci. 2021, 11, 3417. [Google Scholar] [CrossRef]
- Shi, K.; Zhang, X.; Xia, S. Multiple Swarm Fruit Fly Optimization Algorithm Based Path Planning Method for Multi-UAVs. Appl. Sci. 2020, 10, 2822. [Google Scholar] [CrossRef] [Green Version]
- Liu, H.; Ge, J.; Wang, Y.; Li, J.; Ding, K.; Zhang, Z.; Guo, Z.; Li, W.; Lan, J. Multi-UAV Optimal Mission Assignment and Path Planning for Disaster Rescue Using Adaptive Genetic Algorithm and Improved Artificial Bee Colony Method. Actuators 2021, 11, 4. [Google Scholar] [CrossRef]
- Liu, X.; Yan, C.; Zhou, H.; Chang, Y.; Xiang, X.; Tang, D. Towards Flocking Navigation and Obstacle Avoidance for Multi-UAV Systems through Hierarchical Weighting Vicsek Model. Aerospace 2021, 8, 286. [Google Scholar] [CrossRef]
- Yu, T.; Tang, J.; Bai, L.; Lao, S. Collision Avoidance for Cooperative UAVs with Rolling Optimization Algorithm Based on Predictive State Space. Appl. Sci. 2017, 7, 329. [Google Scholar] [CrossRef]
- Fabra, F.; Calafate, C.T.; Cano, J.C.; Manzoni, P. A collision avoidance solution for UAVs following planned missions. In Proceedings of the 2018 IEEE Wireless Communications and Networking Conference Workshops (WCNCW), Barcelona, Spain, 15–18 April 2018; IEEE: New York, NY, USA, 2018; pp. 55–60. [Google Scholar]
- Lao, M.; Tang, J. Sense selection strategy of collision avoidance for cooperative UAVs sharing airspace. In Proceedings of the 2016 IEEE Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chongqing, China, 20–22 May 2016; IEEE: New York, NY, USA, 2016; pp. 11–15. [Google Scholar]
- Chou, F.-Y.; Yang, C.-Y.; Yang, J.-S. Support vector machine based artificial potential field for autonomous guided vehicle. In Proceedings of the SPIE, Fourth International Symposium on Precision Mechanical Measurements, Hefei, Anhui, China, 25–29 August 2008; SPIE-International Society for Optical Engineering: Bellingham, WA, USA, 2008; p. 71304J. [Google Scholar]
- Masoud, A.A. Managing the Dynamics of a Harmonic Potential Field-Guided Robot in a Cluttered Environment. IEEE Trans. Ind. Electron. 2009, 56, 488–496. [Google Scholar] [CrossRef] [Green Version]
- Huang, H.; Zhou, H.; Zheng, M.; Xu, C.; Zhang, X.; Xiong, W. Cooperative Collision Avoidance Method for Multi-UAV Based on Kalman Filter and Model Predictive Control. In Proceedings of the 2019 International Conference on Unmanned Systems and Artificial Intelligence (ICUSAI), Xi’an, China, 22–24 November 2019; IEEE: New York, NY, USA, 2019; pp. 1–7. [Google Scholar]
- Nordlund, P.-J.; Gustafsson, F. Probabilistic Conflict Detection for Piecewise Straight Paths; Linköping University Electronic Press: Linköping, Sweden, 2008. [Google Scholar]
- Li, D.; Cui, D. Air traffic control conflict detection algorithm based on Brownian motion. J. Tsinghua Univ. 2008, 48, 477. [Google Scholar]
- Gan, X.; Wu, Y.; Liu, P.; Wang, Q. Dynamic Collision Avoidance Zone Modeling Method Based on UAV Emergency Collision Avoidance Trajectory. In Proceedings of the 2020 IEEE International Conference on Artificial Intelligence and Information Systems (ICAIIS), Dalian, China, 20–22 March 2020; IEEE: New York, NY, USA, 2020; pp. 693–696. [Google Scholar]
- De Sá, A.O.; Nedjah, N.; Mourelle, L.d.M. Distributed and resilient localization algorithm for Swarm Robotic Systems. Appl. Soft Comput. 2017, 57, 738–750. [Google Scholar] [CrossRef]
- De Haag, M.U.; Huschbeck, S.; Huff, J. sUAS Swarm Navigation using Inertial, Range Radios and Partial GNSS. In Proceedings of the 2019 IEEE/AIAA 38th Digital Avionics Systems Conference (DASC), San Diego, CA, USA, 8–12 September 2019; IEEE: New York, NY, USA, 2019; pp. 1–10. [Google Scholar]
- Nallanthighal, R.S.; Chinta, V. Improved Grid-Scan Localization Algorithm for Wireless Sensor Networks. J. Eng. 2014, 2014, 628161. [Google Scholar] [CrossRef] [Green Version]
- Bulusu, N.; Heidemann, J.; Estrin, D. GPS-less low-cost outdoor localization for very small devices. IEEE Pers. Commun. 2000, 7, 28–34. [Google Scholar] [CrossRef] [Green Version]
- Li, N.; Becerik-Gerber, B.; Krishnamachari, B.; Soibelman, L. A BIM centered indoor localization algorithm to support building fire emergency response operations. Autom. Constr. 2014, 42, 78–89. [Google Scholar] [CrossRef]
- Yun, S.; Lee, J.; Chung, W.; Kim, E.; Kim, S. A soft computing approach to localization in wireless sensor networks. Expert Syst. Appl. 2009, 36, 7552–7561. [Google Scholar] [CrossRef]
- Kim, S.-Y.; Kwon, O.-H. Location estimation based on edge weights in wireless sensor networks. J. Korean Inst. Commun. Inf. Sci. 2005, 30, 938–948. [Google Scholar]
- Son, J.; Kim, S.; Sohn, K. A multi-vision sensor-based fast localization system with image matching for challenging outdoor environments. Expert Syst. Appl. 2015, 42, 8830–8839. [Google Scholar] [CrossRef]
- DJI. DJI Tello Drone Shop. Available online: https://m.dji.com/product/tello-edu?from=shop (accessed on 18 October 2022).
- Rampinelli, M.; Covre, V.B.; De Queiroz, F.M.; Vassallo, R.F.; Bastos-Filho, T.F.; Mazo, M. An Intelligent Space for Mobile Robot Localization Using a Multi-Camera System. Sensors 2014, 14, 15039–15064. [Google Scholar] [CrossRef] [Green Version]
- Causa, F.; Fasano, G.; Grassi, M. GNSS-aware Path Planning for UAV swarm in complex environments. In Proceedings of the 2019 IEEE 5th International Workshop on Metrology for AeroSpace (MetroAeroSpace), Turin, Italy, 19–21 June 2019; IEEE: New York, NY, USA, 2019; pp. 661–666. [Google Scholar]
- Rabaey, C.S.J.; Langendoen, K. Robust positioning algorithms for distributed ad-hoc wireless sensor networks. In Proceedings of the USENIX Technical Annual Conference, Monterey, CA, USA, 10–15 June 2002; pp. 317–327. [Google Scholar]
- De Sá, A.O.; Nedjah, N.; de Macedo Mourelle, L. Distributed efficient localization in swarm robotic systems using swarm intelligence algorithms. Neurocomputing 2016, 172, 322–336. [Google Scholar] [CrossRef]
- Rashid, A.T.; Frasca, M.; Ali, A.A.; Rizzo, A.; Fortuna, L. Multi-robot localization and orientation estimation using robotic cluster matching algorithm. Robot. Auton. Syst. 2015, 63, 108–121. [Google Scholar] [CrossRef]
- Choi, S.-C.; Hussen, H.R.; Park, J.-H.; Kim, J. Geolocation-Based Routing Protocol for Flying Ad Hoc Networks (FANETs). In Proceedings of the 2018 Tenth International Conference on Ubiquitous and Future Networks (ICUFN), Prague, Czech Republic, 3–6 July 2018; IEEE: New York, NY, USA, 2018; pp. 50–52. [Google Scholar]
- Vicsek, T.; Zafeiris, A. Collective motion. Collect. Motion 2012, 517, 71–140. [Google Scholar] [CrossRef] [Green Version]
- Zhu, C.; Liang, X.; He, L.; Liu, L. Demonstration and verification system for UAV formation control. In Proceedings of the 2017 3rd IEEE International Conference on Control Science and Systems Engineering (ICCSSE), Beijing, China, 17–19 August 2017; IEEE: New York, NY, USA, 2017; pp. 56–60. [Google Scholar]
- Brust, M.R.; Danoy, G.; Bouvry, P.; Gashi, D.; Pathak, H.; Goncalves, M.P. Defending Against Intrusion of Malicious UAVs with Networked UAV Defense Swarms. In Proceedings of the 2017 IEEE 42nd Conference on Local Computer Networks: Workshops (LCN Workshops), Singapore, 9 October 2017; IEEE: New York, NY, USA, 2017; pp. 103–111. [Google Scholar]
- Azam, M.A.; Mittelmann, H.D.; Ragi, S. UAV Formation Shape Control via Decentralized Markov Decision Processes. Algorithms 2021, 14, 91. [Google Scholar] [CrossRef]
- Xie, Y.; Han, L.; Dong, X.; Li, Q.; Ren, Z. Bio-inspired adaptive formation tracking control for swarm systems with application to UAV swarm systems. Neurocomputing 2021, 453, 272–285. [Google Scholar] [CrossRef]
- Madden, J.D.; Arkin, R.C.; MacNulty, D.R. Multi-robot system based on model of wolf hunting behavior to emulate wolf and elk interactions. In Proceedings of the 2010 IEEE International Conference on Robotics and Biomimetics, Tianjin, China, 14–18 December 2010; IEEE: New York, NY, USA, 2010; pp. 1043–1050. [Google Scholar]
- Zhang, S.; Zhou, Y.; Li, Z.; Pan, W. Grey wolf optimizer for unmanned combat aerial vehicle path planning. Adv. Eng. Softw. 2016, 99, 121–136. [Google Scholar] [CrossRef] [Green Version]
- Dewangan, R.K.; Shukla, A.; Godfrey, W.W. Three dimensional path planning using Grey wolf optimizer for UAVs. Appl. Intell. 2019, 49, 2201–2217. [Google Scholar] [CrossRef]
- Duan, H.; Yang, Q.; Deng, Y.; Li, P.; Qiu, H.; Zhang, T.; Zhang, D.; Huo, M.; Shen, Y. Unmanned aerial systems coordinate target allocation based on wolf behaviors. Sci. China Inf. Sci. 2018, 62, 14201. [Google Scholar] [CrossRef] [Green Version]
- Yao, P.; Wang, H.; Ji, H. Multi-UAVs tracking target in urban environment by model predictive control and Improved Grey Wolf Optimizer. Aerosp. Sci. Technol. 2016, 55, 131–143. [Google Scholar] [CrossRef]
- Fabra, F.; Zamora, W.; Reyes, P.; Calafate, C.T.; Cano, J.-C.; Manzoni, P.; Hernandez-Orallo, E. An UAV Swarm Coordination Protocol Supporting Planned Missions. In Proceedings of the 2019 28th International Conference on Computer Communication and Networks (ICCCN), Valencia, Spain, 29 July–1 August 2019; IEEE: New York, NY, USA, 2019; pp. 1–9. [Google Scholar]
- Opromolla, R.; Inchingolo, G.; Fasano, G. Airborne Visual Detection and Tracking of Cooperative UAVs Exploiting Deep Learning. Sensors 2019, 19, 4332. [Google Scholar] [CrossRef] [Green Version]
- Bertuccelli, L.F.; How, J.P. Robust UAV search for environments with imprecise probability maps. In Proceedings of the 44th IEEE Conference on Decision and Control, Seville, Spain, 15 December 2005; IEEE: New York, NY, USA, 2005; pp. 5680–5685. [Google Scholar]
- Yang, Y.; Minai, A.A.; Polycarpou, M.M. Decentralized cooperative search by networked UAVs in an uncertain environment. In Proceedings of the 2004 American Control Conference, Boston, MA, USA, 30 June–2 July 2004; IEEE: New York, NY, USA, 2004; pp. 5558–5563. [Google Scholar]
- Hu, J.; Xie, L.; Xu, J.; Xu, Z. Multi-Agent Cooperative Target Search. Sensors 2014, 14, 9408–9428. [Google Scholar] [CrossRef] [Green Version]
- Duan, H.; Qiao, P. Pigeon-inspired optimization: A new swarm intelligence optimizer for air robot path planning. Int. J. Intell. Comput. Cybern. 2014, 7, 24–37. [Google Scholar] [CrossRef]
- Li, L.; Xu, S.; Nie, H.; Mao, Y.; Yu, S. Collaborative Target Search Algorithm for UAV Based on Chaotic Disturbance Pigeon-Inspired Optimization. Appl. Sci. 2021, 11, 7358. [Google Scholar] [CrossRef]
- Li, X.; Chen, J.; Deng, F.; Li, H. Profit-Driven Adaptive Moving Targets Search with UAV Swarms. Sensors 2019, 19, 1545. [Google Scholar] [CrossRef] [PubMed]
- Apple. Lose Your Knack for Losing Things. Available online: https://www.apple.com/airtag/?afid=p238%7Csk3e2cSut-dc_mtid_1870765e38482_pcrid_569595868773_pgrid_125218674714_pntwk_g_pchan__pexid__&cid=aos-us-kwgo-btb--slid---product- (accessed on 18 October 2022).
- Mendonca, R.; Marques, M.M.; Marques, F.; Lourenco, A.; Pinto, E.; Santana, P.; Coito, F.; Lobo, V.; Barata, J. A cooperative multi-robot team for the surveillance of shipwreck survivors at sea. In Proceedings of the OCEANS 2016 MTS/IEEE Monterey, Monterey, CA, USA, 19–23 September 2016; IEEE: New York, NY, USA, 2016; pp. 1–6. [Google Scholar]
- Brust, M.R.; Danoy, G.; Stolfi, D.H.; Bouvry, P. Swarm-based counter UAV defense system. Discov. Internet Things 2021, 1, 2. [Google Scholar] [CrossRef]
- Kerns, A.J.; Shepard, D.P.; Bhatti, J.A.; Humphreys, T.E. Unmanned Aircraft Capture and Control Via GPS Spoofing: Unmanned Aircraft Capture and Control. J. Field Robot. 2014, 31, 617–636. [Google Scholar] [CrossRef]
- Shepard, D.P.; Bhatti, J.A.; Humphreys, T.E.; Fansler, A.A. Evaluation of smart grid and civilian UAV vulnerability to GPS spoofing attacks. In Proceedings of the 25th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS 2012), Nashville, TN, USA, 17–21 September 2012; pp. 3591–3605. [Google Scholar]
- Akhloufi, M.A.; Arola, S.; Bonnet, A. Drones Chasing Drones: Reinforcement Learning and Deep Search Area Proposal. Drones 2019, 3, 58. [Google Scholar] [CrossRef] [Green Version]
- Choudhary, G.; Sharma, V.; You, I.; Yim, K.; Chen, I.-R.; Cho, J.-H. Intrusion Detection Systems for Networked Unmanned Aerial Vehicles: A Survey. In Proceedings of the 2018 14th International Wireless Communications & Mobile Computing Conference (IWCMC), Limassol, Cyprus, 25–29 June 2018; pp. 560–565. [Google Scholar]
- Sharma, M.; Saini, S.; Bahl, S.; Goyal, R.; Deswal, S. Modified Bio-Inspired Algorithms for Intrusion Detection System. In Proceedings of the International Conference on Innovative Computing and Communications, Delhi, India, 20–21 February 2021; Gupta, D., Khanna, A., Bhattacharyya, S., Hassanien, A.E., Anand, S., Jaiswal, A., Eds.; Springer: Singapore, 2021; pp. 185–201. [Google Scholar]
- Phadke, A.; Ustymenko, S. Updating the Taxonomy of Intrusion Detection Systems. In Proceedings of the 2021 IEEE 45th Annual Computers, Software, and Applications Conference (COMPSAC), Madrid, Spain, 12–16 July 2021; pp. 1085–1091. [Google Scholar]
- Kumari, A.; Gupta, R.; Tanwar, S.; Kumar, N. A taxonomy of blockchain-enabled softwarization for secure UAV network. Comput. Commun. 2020, 161, 304–323. [Google Scholar] [CrossRef]
- Tan, X.; Su, S.; Zuo, Z.; Guo, X.; Sun, X. Intrusion Detection of UAVs Based on the Deep Belief Network Optimized by PSO. Sensors 2019, 19, 5529. [Google Scholar] [CrossRef] [Green Version]
- Li, L.; Zhang, H.; Peng, H.; Yang, Y. Nearest neighbors based density peaks approach to intrusion detection. Chaos Solitons Fractals 2018, 110, 33–40. [Google Scholar] [CrossRef]
- Sedjelmaci, H.; Senouci, S.M.; Ansari, N. A Hierarchical Detection and Response System to Enhance Security Against Lethal Cyber-Attacks in UAV Networks. IEEE Trans. Syst. Man Cybern. Syst. 2018, 48, 1594–1606. [Google Scholar] [CrossRef] [Green Version]
- Phadke, A.; Medrano, F.A.; Ustymenko, S. Applications of Blockchain in E-government. In Proceedings of the 2022 International Symposium on Electrical, Electronics and Information Engineering (ISEEIE), Chiang Mai, Thailand, 25–27 February 2022; pp. 157–164. [Google Scholar] [CrossRef]
- Jensen, I.J.; Selvaraj, D.F.; Ranganathan, P. Blockchain Technology for Networked Swarms of Unmanned Aerial Vehicles (UAVs). In Proceedings of the 2019 IEEE 20th International Symposium on “A World of Wireless, Mobile and Multimedia Networks” (WoWMoM), Washington, DC, USA, 10–12 June 2019; pp. 1–7. [Google Scholar]
- Bhatia, J.; Dave, R.; Bhayani, H.; Tanwar, S.; Nayyar, A. SDN-based real-time urban traffic analysis in VANET environment. Comput. Commun. 2020, 149, 162–175. [Google Scholar] [CrossRef]
- Singh, M.; Singh, A.; Kim, S. Blockchain: A game changer for securing IoT data. In Proceedings of the 2018 IEEE 4th World Forum on Internet of Things (WF-IoT), Singapore, 5–8 February 2018; pp. 51–55. [Google Scholar] [CrossRef]
- Liang, X.; Zhao, J.; Shetty, S.; Li, D. Towards data assurance and resilience in IoT using blockchain. In Proceedings of the MILCOM 2017—2017 IEEE Military Communications Conference (MILCOM), Baltimore, MD, USA, 23–25 October 2017; pp. 261–266. [Google Scholar] [CrossRef]
- Alladi, T.; Chamola, V.; Sahu, N.; Guizani, M. Applications of blockchain in unmanned aerial vehicles: A review. Veh. Commun. 2020, 23, 100249. [Google Scholar] [CrossRef]
- Lu, Y.; Ma, Y.; Wang, J.; Han, L. Task Assignment of UAV Swarm Based on Wolf Pack Algorithm. Appl. Sci. 2020, 10, 8335. [Google Scholar] [CrossRef]
- Lu, Y.; Ma, Y.; Wang, J. Multi-Population Parallel Wolf Pack Algorithm for Task Assignment of UAV Swarm. Appl. Sci. 2021, 11, 11996. [Google Scholar] [CrossRef]
- Novoa-Hernández, P.; Corona, C.C.; Pelta, D.A. A software tool for assisting experimentation in dynamic environments. Appl. Comp. Intell. Soft Comput. 2015, 2015, 302172. [Google Scholar] [CrossRef] [Green Version]
- Wu, H.; Li, H.; Xiao, R.; Liu, J. Modeling and simulation of dynamic ant colony’s labor division for task allocation of UAV swarm. Phys. A Stat. Mech. Its Appl. 2018, 491, 127–141. [Google Scholar] [CrossRef]
- Jiang, X.; Zhou, Q.; Ye, Y. Method of Task Assignment for UAV Based on Particle Swarm Optimization in logistics. In Proceedings of the 2017 International Conference on Intelligent Systems, Metaheuristics & Swarm Intelligence, Hong Kong, China, 25–27 March; 2017; pp. 113–117. [Google Scholar]
- Alwateer, M.; Loke, S.W. A Two-Layered Task Servicing Model for Drone Services: Overview and Preliminary Results. In Proceedings of the 2019 IEEE International Conference on Pervasive Computing and Communications Workshops (PerCom Workshops), Kyoto, Japan, 11–15 March 2019; pp. 387–390. [Google Scholar]
- Wang, M.; Chen, P.; Cao, Z.; Chen, Y. Reinforcement Learning-Based UAVs Resource Allocation for Integrated Sensing and Communication (ISAC) System. Electronics 2022, 11, 441. [Google Scholar] [CrossRef]
- Chen, S.; Shi, L.; Ding, X.; Lv, Z.; Li, Z. Energy Efficient Resource Allocation and Trajectory Optimization in UAV-Assisted Mobile Edge Computing System. In Proceedings of the 2021 7th International Conference on Big Data Computing and Communications (BigCom), Deqing, China, 13–15 August 2021; pp. 7–13. [Google Scholar] [CrossRef]
- Scheutz, M.; Schermerhorn, P.; Bauer, P. The utility of heterogeneous swarms of simple UAVs with limited sensory capacity in detection and tracking tasks. In Proceedings of the 2005 IEEE Swarm Intelligence Symposium, 2005. SIS 2005, Pasadena, CA, USA, 8–10 June 2005; pp. 257–264. [Google Scholar] [CrossRef]
- Kwa, H.L.; Tokić, G.; Bouffanais, R.; Yue, D.K.P. Heterogeneous Swarms for Maritime Dynamic Target Search and Tracking. In Proceedings of the Global Oceans 2020: Singapore—U.S. Gulf Coast, IEEE/MTS OCEANS 2020, Singapore, 5–30 October 2020; pp. 1–8. [Google Scholar]
- Gade, S.; Joshi, A. Heterogeneous UAV swarm system for target search in adversarial environment. In Proceedings of the 2013 International Conference on Control Communication and Computing (ICCC), Thiruvananthapuram, India, 13–15 December 2013; pp. 358–363. [Google Scholar]
- Ramana Makkapati, V.; Tsiotras, P. Apollonius Allocation Algorithm for Heterogeneous Pursuers to Capture Multiple Evaders. arXiv 2020, arXiv:2006.10253. [Google Scholar]
- Xu, C.; Zhang, K.; Jiang, Y.; Niu, S.; Yang, T.; Song, H. Communication Aware UAV Swarm Surveillance Based on Hierarchical Architecture. Drones 2021, 5, 33. [Google Scholar] [CrossRef]
- Dewan, A.; Mahendran, A.; Soni, N.; Krishna, M. Optimization Based coordinated uGV-MAV exploration for 2D augmented mapping. In Proceedings of the 2013 International Conference on Autonomous Agents and Multi-Agent Systems, St. Paul, MN USA, 6–10 May 2013; pp. 1125–1126. [Google Scholar]
- Wanasinghe, T.R.; Mann, G.K.I.; Gosine, R.G. Distributed Leader-Assistive Localization Method for a Heterogeneous Multirobotic System. IEEE Trans. Autom. Sci. Eng. 2015, 12, 795–809. [Google Scholar] [CrossRef]
- Wang, J.; Jia, G.; Lin, J.; Hou, Z. Cooperative Mission Planning for Heterogeneous UAVs with the Improved Multi-objective Quantum-behaved Particle Swarm Optimization Algorithm. In Proceedings of the 2019 Chinese Control and Decision Conference (CCDC), Nanchang, China, 3–5 June 2019; pp. 3740–3745. [Google Scholar]
- Zhang, H.; He, Y.; Li, D.; Gu, F.; Li, Q.; Zhang, M.; Di, C.; Chu, L.; Chen, B.; Hu, Y. Marine UAV–USV Marsupial Platform: System and Recovery Technic Verification. Appl. Sci. 2020, 10, 1583. [Google Scholar] [CrossRef] [Green Version]
- Gomes, J.; Mariano, P.; Christensen, A.L. Cooperative Coevolution of Partially Heterogeneous Multiagent Systems. 9. Available online: https://dl.acm.org/doi/abs/10.5555/2772879.2772919 (accessed on 8 October 2022).
- Kumar, P.S.; Emfinger, W.; Karsai, G. A testbed to simulate and analyze resilient cyber-physical systems. In Proceedings of the 2015 International Symposium on Rapid System Prototyping (RSP), Amsterdam, The Netherlands, 8–9 October 2015; pp. 97–103. [Google Scholar]
- Sun, Q.; Li, H.; Zhang, Y.; Xie, Y.; Liu, C. A Baseline Assessment Method of UAV Swarm Resilience Based on Complex Networks. In Proceedings of the 2021 IEEE 19th World Symposium on Applied Machine Intelligence and Informatics (SAMI), Herl’any, Slovakia, 21–23 January 2021; pp. 83–86. [Google Scholar]
- Tierney, K.; Bruneau, M. Conceptualizing and measuring resilience: A key to disaster loss reduction. TR News 2007, 17, 14–15. [Google Scholar]
- Leveson, N.G. System Safety Engineering: Back to The Future; Aeronautics and Astronautics Massachusetts Institute of Technology: Cambridge, MA, USA, 2002; Manuscript in preparation; Available online: http://sunnyday.mit.edu/book2.pdf (accessed on 18 October 2022).
- Nan, C.; Sansavini, G. A quantitative method for assessing resilience of interdependent infrastructures. Reliab. Eng. Syst. Saf. 2017, 157, 35–53. [Google Scholar] [CrossRef]
- Bai, G.; Li, Y.; Fang, Y.; Zhang, Y.-A.; Tao, J. Network approach for resilience evaluation of a UAV swarm by considering communication limits. Reliab. Eng. Syst. Saf. 2020, 193, 106602. [Google Scholar] [CrossRef]
- Jakaria, A.H.M.; Rahman, M.A. Formal Analysis of k-Resiliency for Collaborative UAVs. In Proceedings of the 2018 IEEE 42nd Annual Computer Software and Applications Conference (COMPSAC), Tokyo, Japan, 23–27 July 2018; pp. 583–592. [Google Scholar]
- Li, H.; Sun, Q.; Ren, K.; Xie, Y.; Liu, C.; Zhang, Y. Dynamic Resilience Assessment of UAV Swarm for Battlefield Surveillance Mission. In Proceedings of the 2021 IEEE International Conference on Unmanned Systems (ICUS), Beijing, China, 15–17 October 2021; pp. 472–477. [Google Scholar] [CrossRef]
- Medjo Me Biomo, J.-D.; Kunz, T.; St-Hilaire, M.; Zhou, Y. Unmanned Aerial ad Hoc Networks: Simulation-Based Evaluation of Entity Mobility Models’ Impact on Routing Performance. Aerospace 2015, 2, 392–422. [Google Scholar] [CrossRef] [Green Version]
- Khan, M.A.; Kumar, N.; Mohsan, S.A.H.; Khan, W.U.; Nasralla, M.M.; Alsharif, M.H.; Zywiolek, J.; Ullah, I. Swarm of UAVs for Network Management in 6G: A Technical Review. IEEE Trans. Netw. Serv. Manag. 2022. [Google Scholar] [CrossRef]
Figure 1.
Examined research categorized into UAV swarm components.

Figure 2.
Research articles classified by the number of recognized UAV swarm components they cover.

Figure 3.
Number of publications on UAV swarms from 2011 to June 2022.

Figure 4.
A categorization of UAV swarm components and modules.

Figure 5.
A high-altitude fixed-wing aircraft providing connectivity support to a low-altitude quadcopter swarm arranged in a multi-level hierarchical tree topology.
Figure 5.
A high-altitude fixed-wing aircraft providing connectivity support to a low-altitude quadcopter swarm arranged in a multi-level hierarchical tree topology.

Figure 6.
A multi-hop data pathway used by a source agent to communicate with the destination agent.
Figure 6.
A multi-hop data pathway used by a source agent to communicate with the destination agent.

Figure 7.
A blockchain based methodology for securing UAV swarms.

Figure 8.
A multi space unmanned vehicle swarm working a mapping mission in tandem.


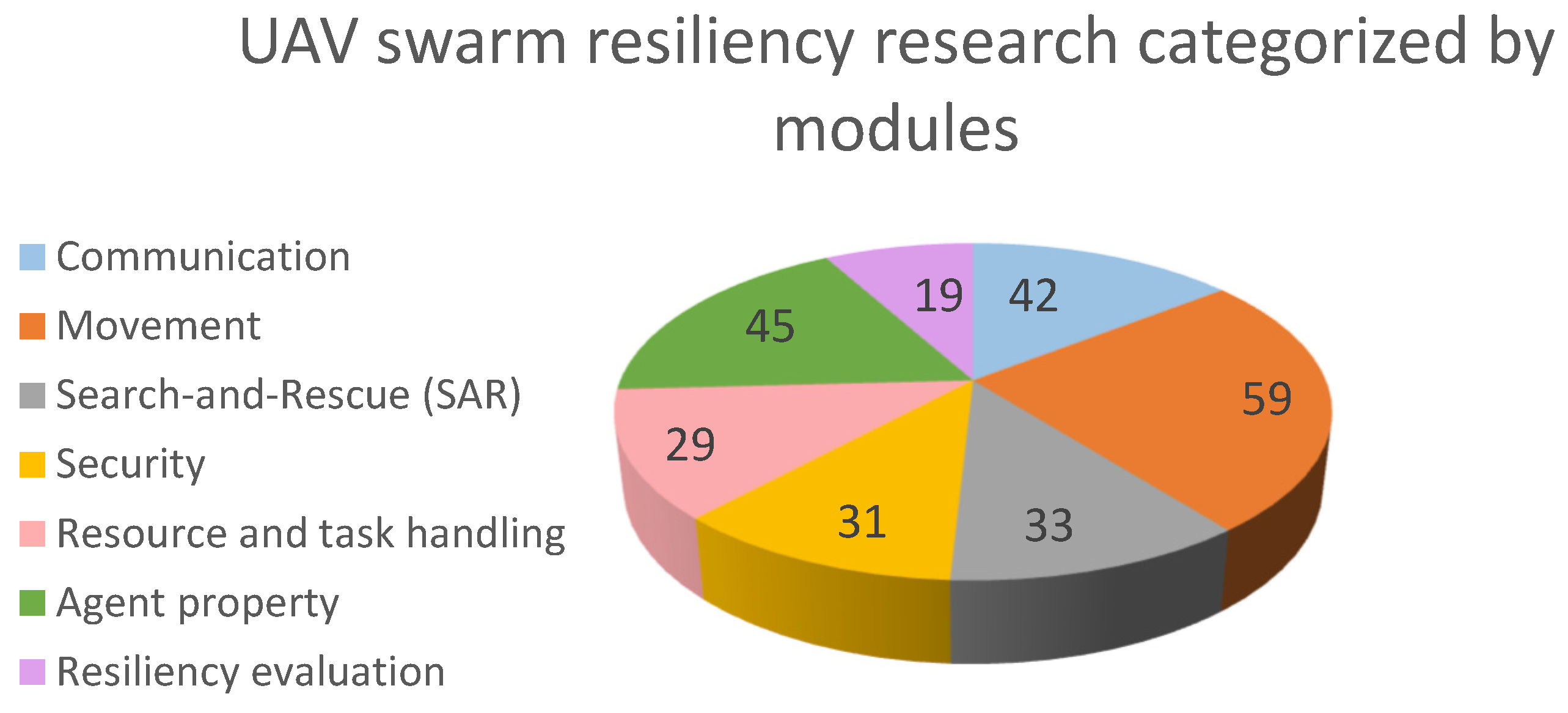{kind=link}
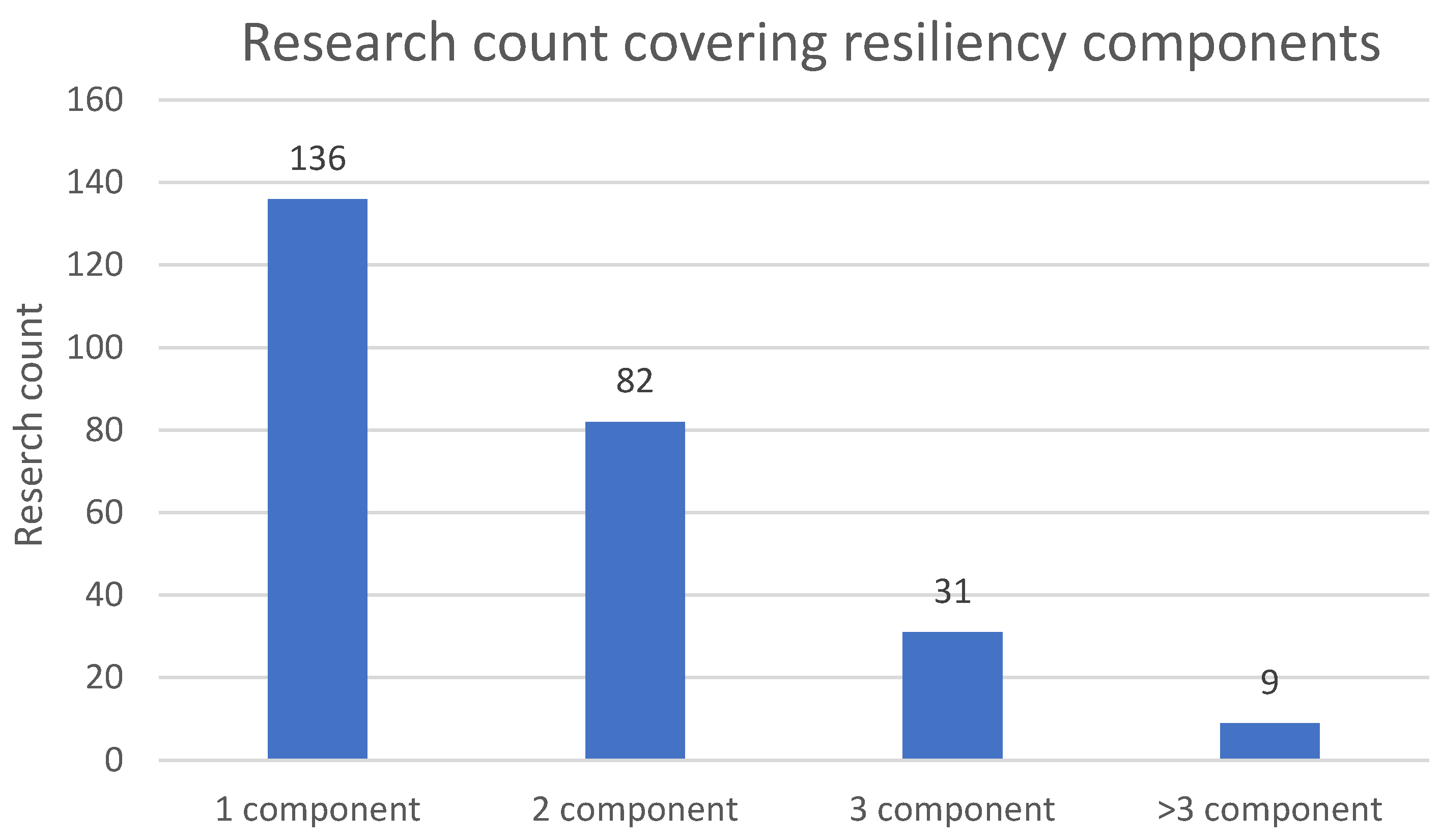{kind=link}
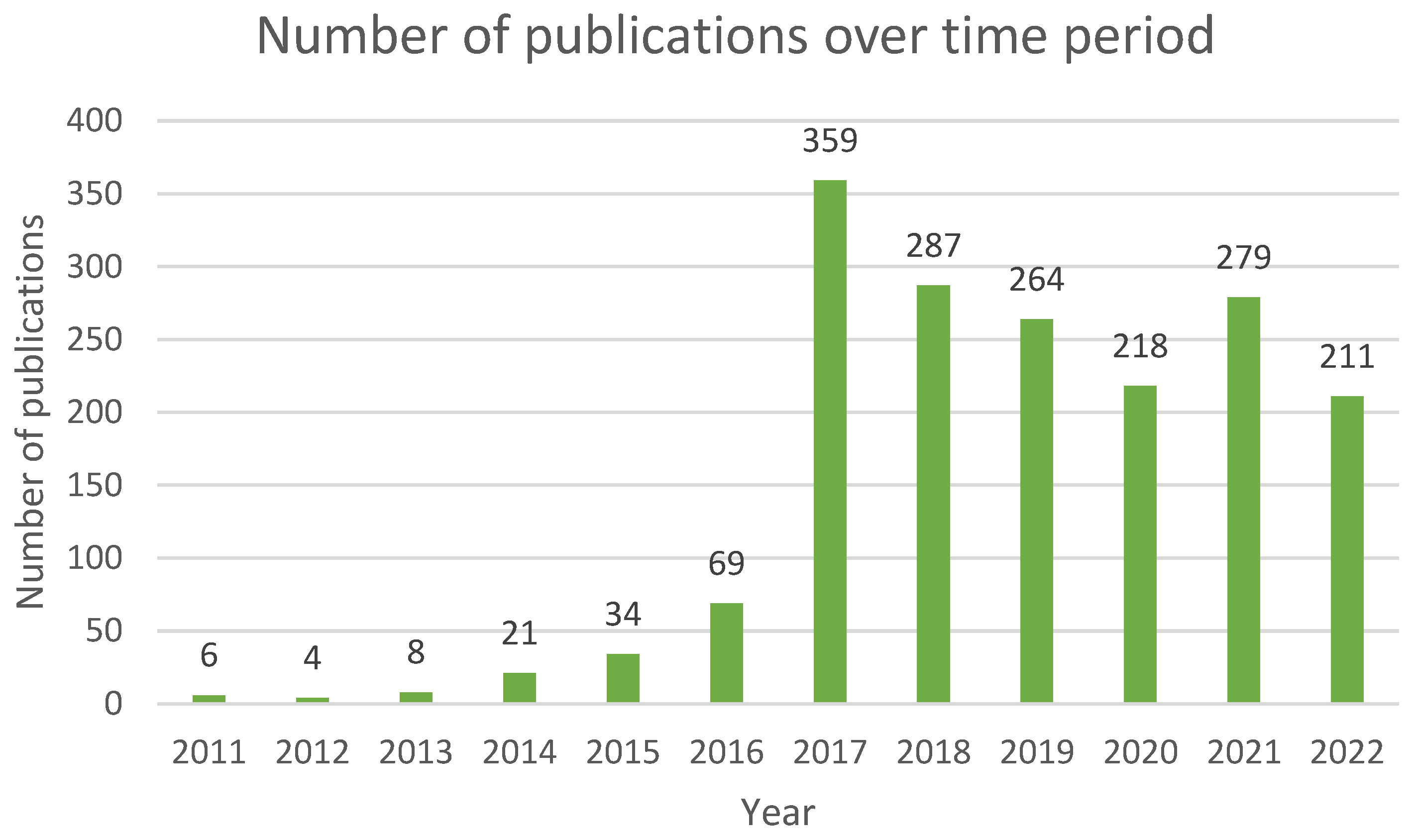{kind=link}
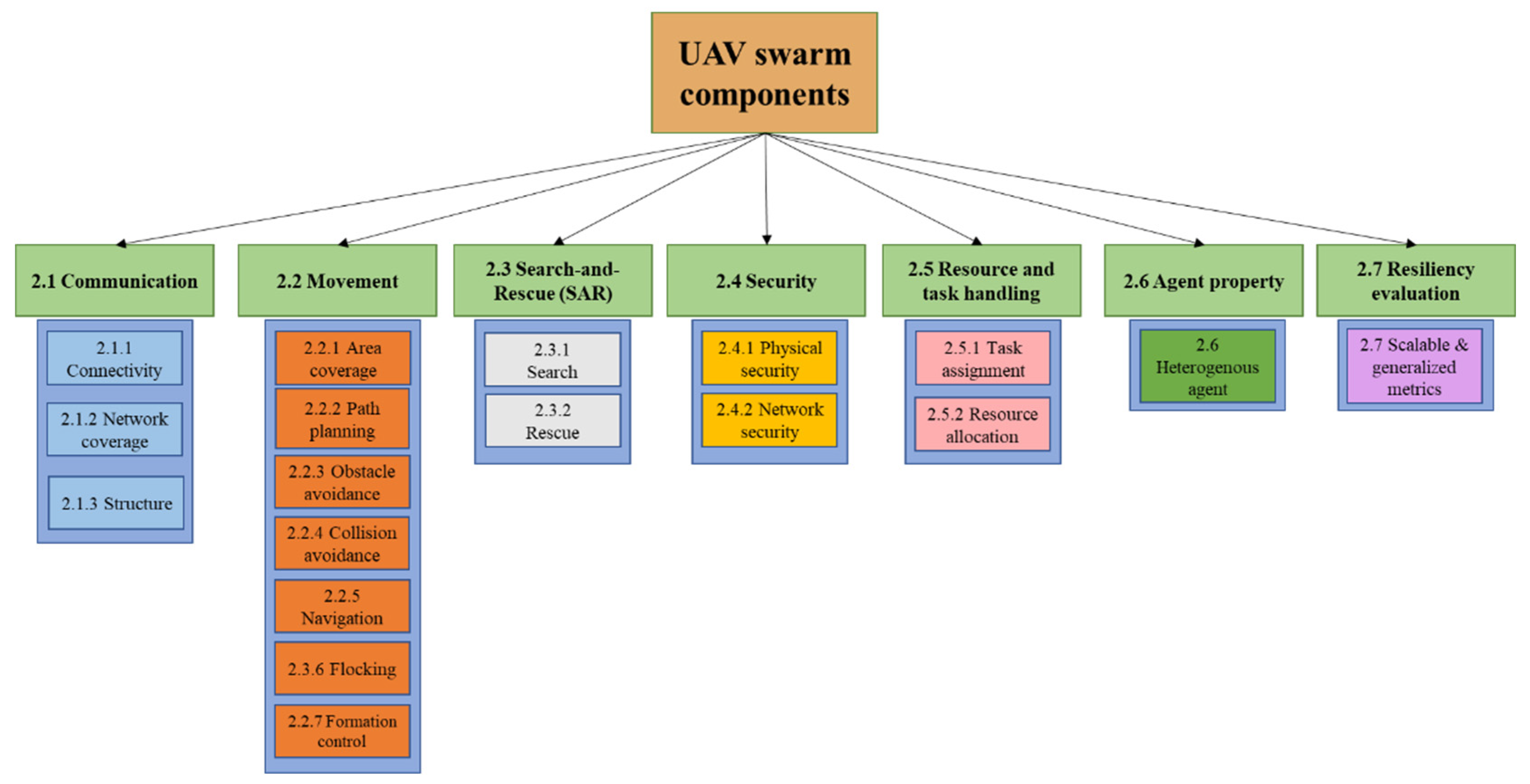{kind=link}
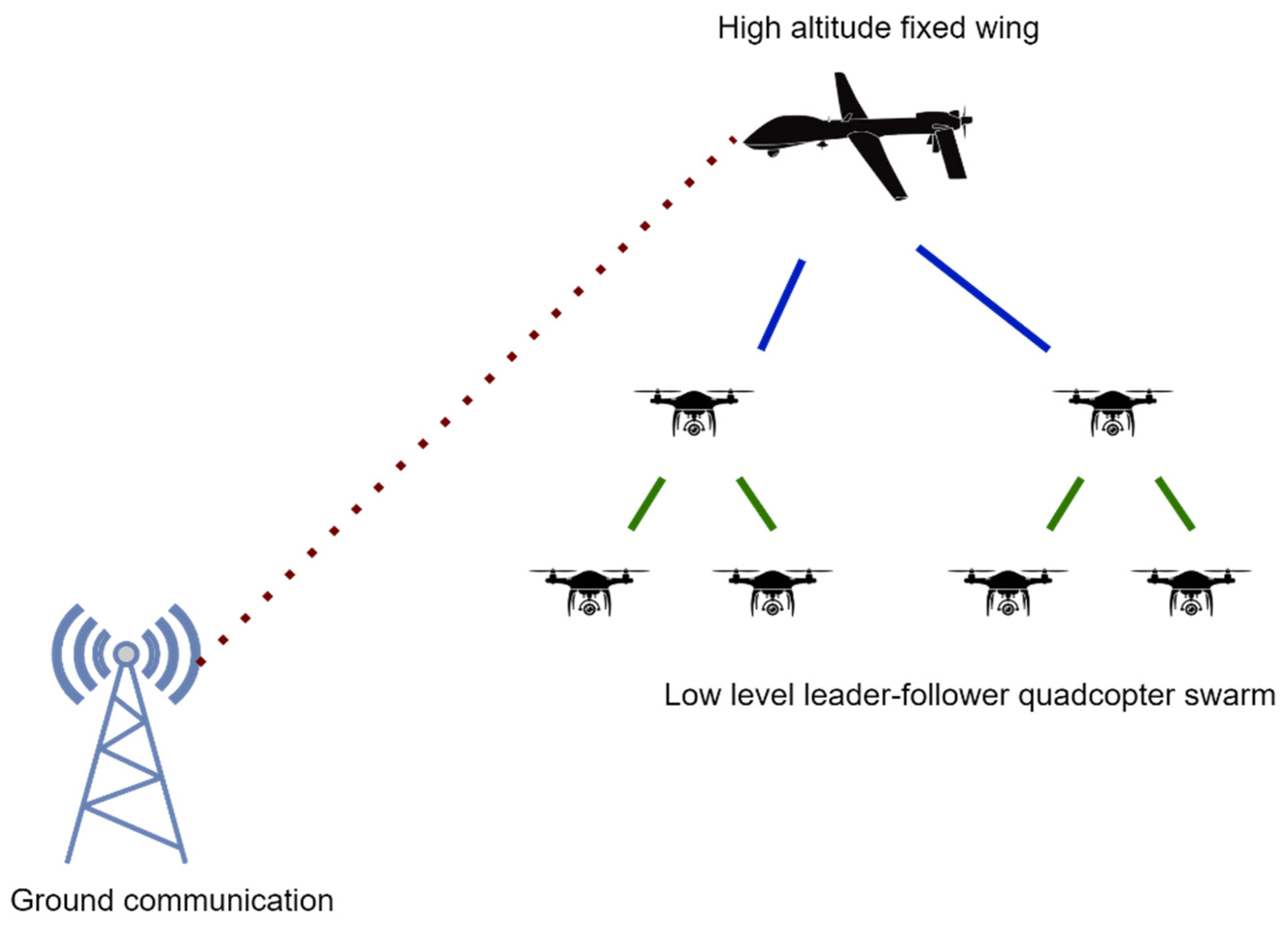{kind=link}
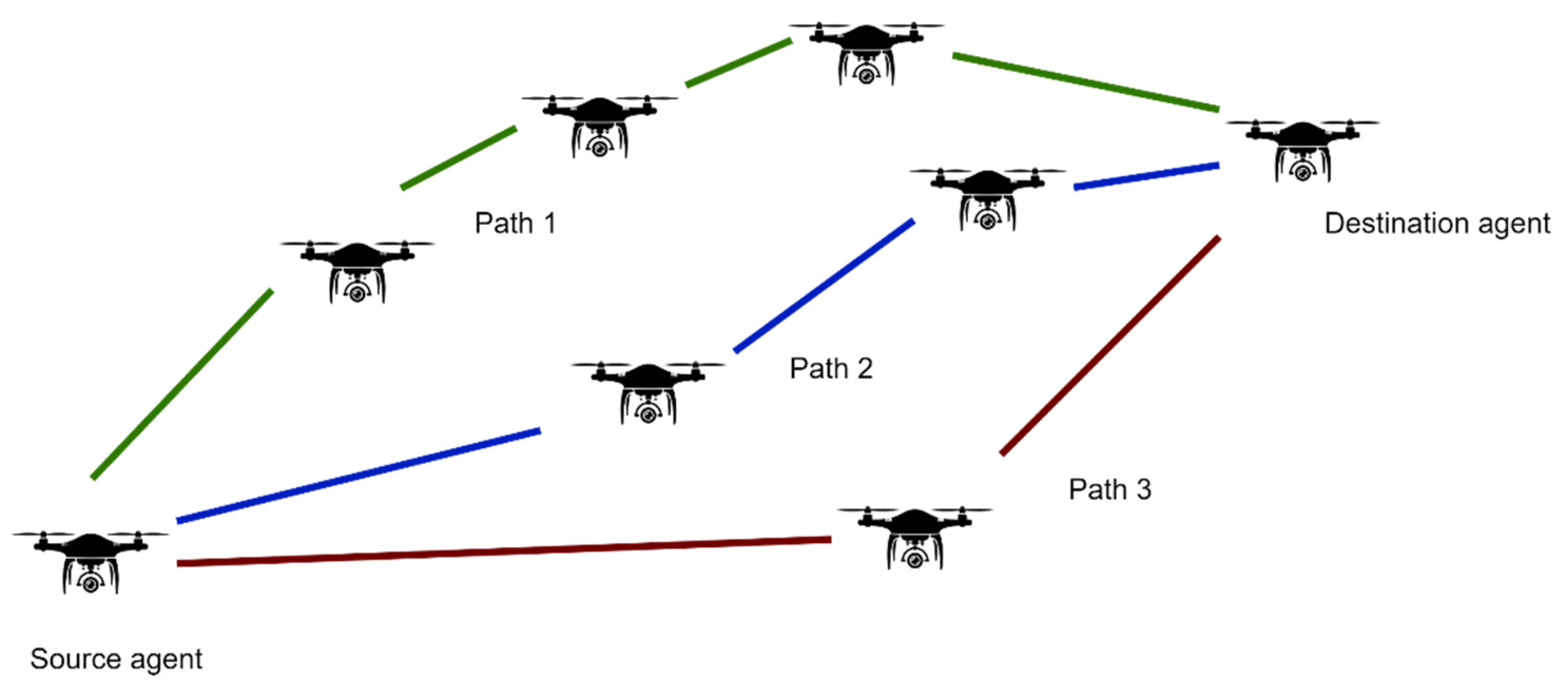{kind=link}
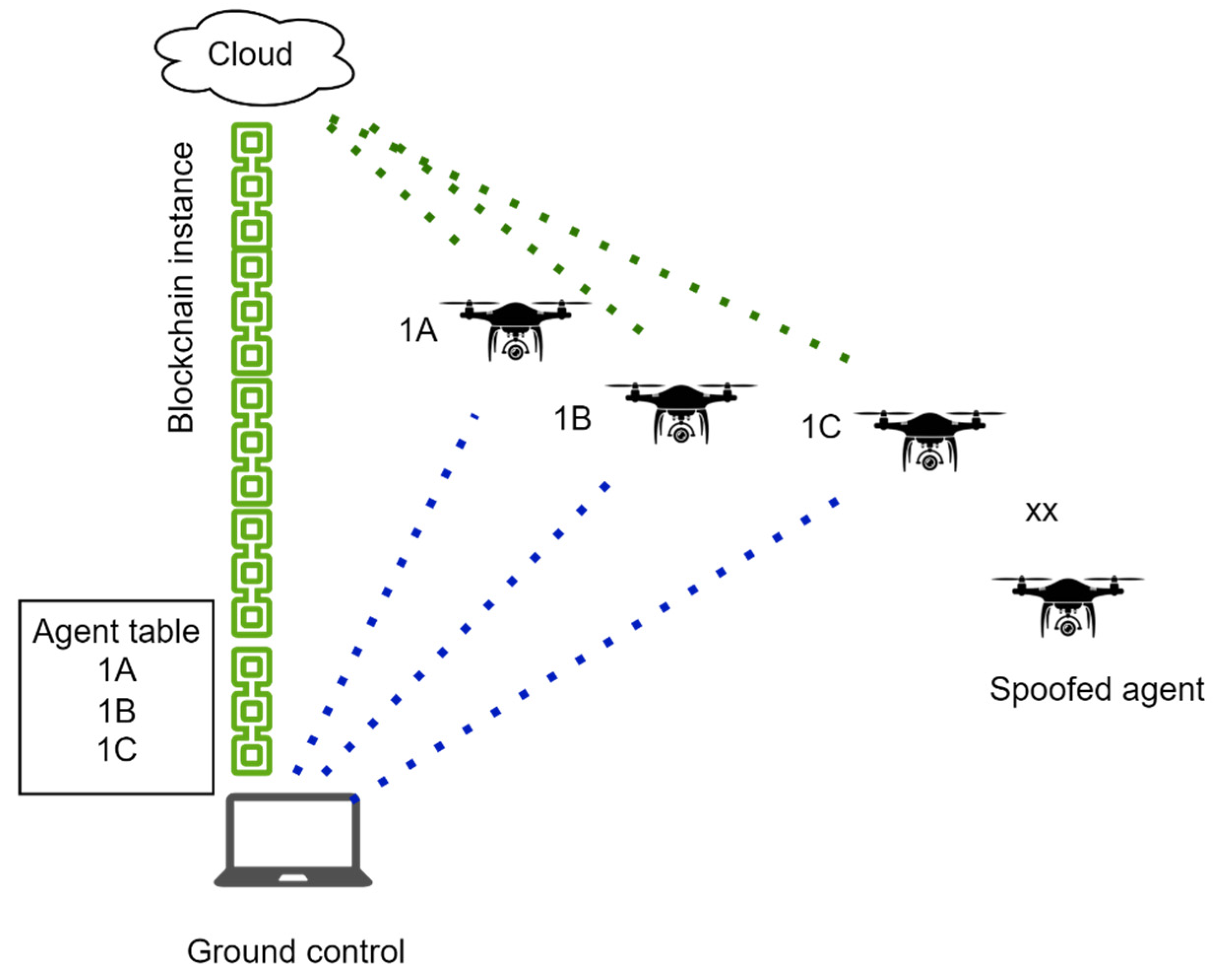{kind=link}
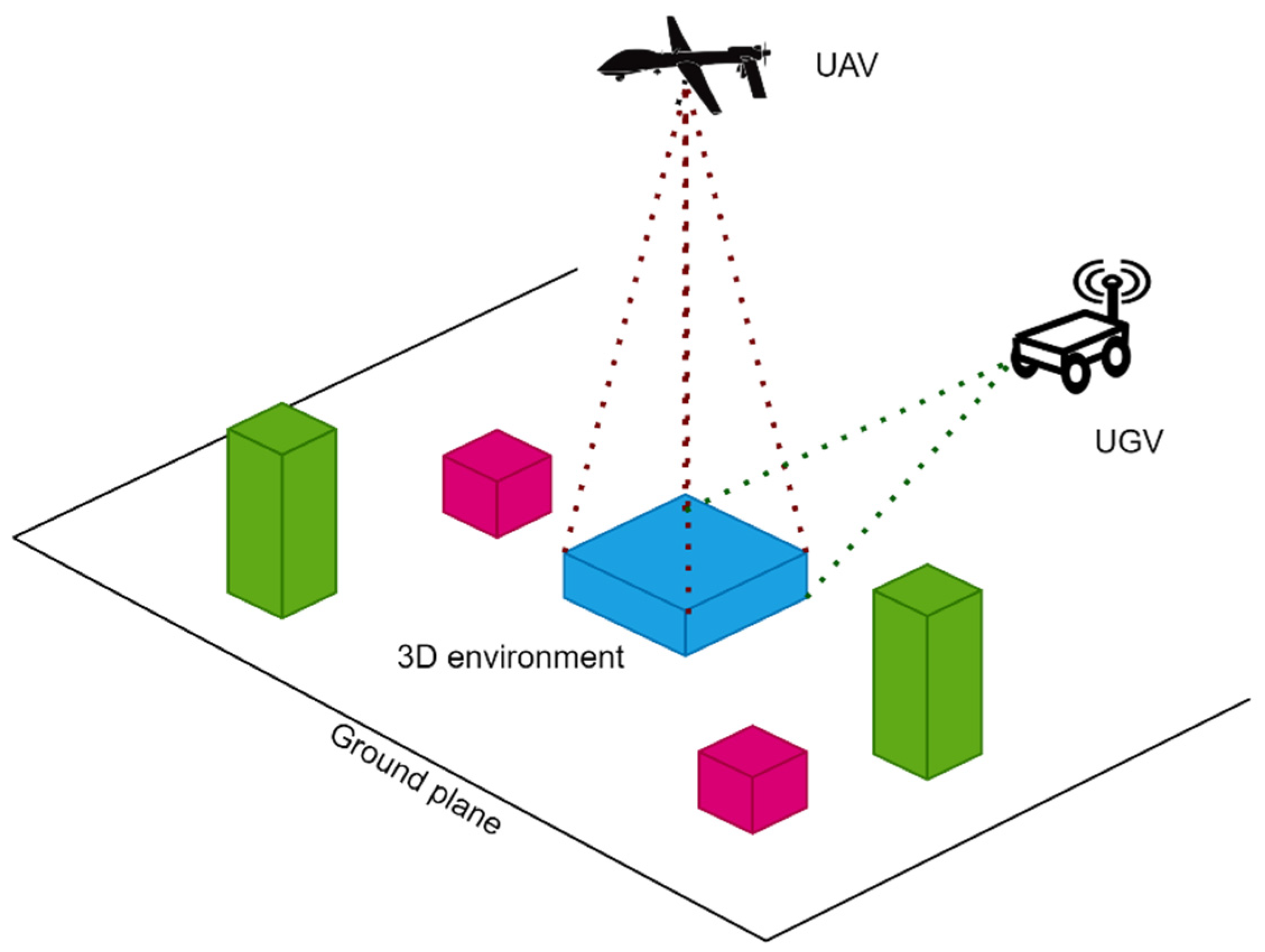{kind=link}
Table 1.
An examination of other related review and survey literature of UAV swarm components sorted by their publication year.
Table 1.
An examination of other related review and survey literature of UAV swarm components sorted by their publication year.
| Reference | Research Focus | Published |
|---|---|---|
| [27] | A review of linear and model-based nonlinear controllers for UAV swarms as well as general swarm characteristics | 2019 |
| [28] | A review of ML-based techniques to improve UAV-based communication modules such as resource management and security | 2019 |
| [23] | A survey of swarm communication architectures and routing protocols and their open research challenges | 2020 |
| [29] | A categorization of swarm behaviors into organization, navigation, decision, and miscellaneous modules | 2020 |
| [30] | Studying issues in UAV swarm communications: Power issues, routing protocols, and quality of service along with open research challenges | 2020 |
| [31] | A survey of application-specific scenarios in internet of things (IoT) by using swarm intelligence | 2020 |
| [32] | A survey of UAV swarm intelligence based on hierarchical frameworks | 2020 |
| [33] | A study of the path planning problem for interception of mobile targets using an UAV swarm | 2021 |
| [34] | Examining dynamic task allocation methods for UAV swarms | 2021 |
| [35] | AI-backed routing protocols used for UAV swarms with an emphasis on dynamic topology properties | 2022 |
| [36] | A broad discussion on UAV, with an overview of swarms, agent characteristics, and applications | 2022 |
| [37] | A discussion on high-level swarm autonomy and the use of cellular networks for swarm communication | 2022 |
| [38] | A review of four main AI-based path planning methods in UAV swarms | 2022 |
| [39] | A summary of swarm intelligence techniques for Multi UAV collaboration | 2022 |
Table 2.
A summary major research focus for each module in the seven recognized components of UAV swarm resilience.
Table 2.
A summary major research focus for each module in the seven recognized components of UAV swarm resilience.
| Parent Component | Module | Major Focus |
|---|---|---|
| 2.1 Communication | 2.1.1 Connectivity | Connectivity maintenance |
| 2.1.2 Network coverage | Efficient coverage of an area with strongly interconnected agents | |
| 2.1.3 Network structure | Types of network topologies | |
| 2.2 Movement | 2.2.1 Area coverage | Optimized area coverage by agents |
| 2.2.2 Path planning | Path planning protocols for agents | |
| 2.2.3 Obstacle avoidance | Protocols to avoid agent interaction with environmental obstacles | |
| 2.2.4 Collision avoidance | Protocols to avoid agent interactions with other agents in the same swarm | |
| 2.2.5 Navigation | Navigation and localization for agents | |
| 2.2.6 Flocking | Flocking dynamics for agent swarms | |
| 2.2.7 Formation control | Formation control for agent swarms | |
| 2.3 Search and Rescue (SAR) | 2.3.1 Search | Searching for lost swarm agents |
| 2.3.2 Rescue | Rescue and connectivity of located agents | |
| 2.4 Security | 2.4.1 Physical security | Ensuring physical security for swarm agents |
| 2.4.2 Network security | Network security and intrusion detection of swarm networks | |
| 2.5 Resource and task handling | 2.5.1 Task assignment | Task assignment protocols for agents in a swarm |
| 2.5.2 Resource allocation | Resource allocation and assignment policies for swarms | |
| 2.6 Agent property | 2.6 Heterogenous agents | The inclusion of heterogenous agents in swarms |
| 2.7 Resiliency evaluation | 2.7 Scalable and generalized metrics | Development of scalable and generalized metrics for evaluating swarm resilience |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Phadke, A.; Medrano, F.A. Towards Resilient UAV Swarms—A Breakdown of Resiliency Requirements in UAV Swarms. Drones 2022, 6, 340. https://doi.org/10.3390/drones6110340
AMA Style
Phadke A, Medrano FA. Towards Resilient UAV Swarms—A Breakdown of Resiliency Requirements in UAV Swarms. Drones. 2022; 6(11):340. https://doi.org/10.3390/drones6110340
Chicago/Turabian StylePhadke, Abhishek, and F. Antonio Medrano. 2022. "Towards Resilient UAV Swarms—A Breakdown of Resiliency Requirements in UAV Swarms" Drones 6, no. 11: 340. https://doi.org/10.3390/drones6110340