
Hybrid Vibration Control of Hospital Buildings against Earthquake Excitations Using Unbonded Fiber-Reinforced Elastomeric Isolator and Tuned Mass Damper


Abstract
:1. Introduction
2. Hybrid Vibration Control System Comprising BIS and TMD
2.1. Base Isolation System (BIS)
2.2. Tuned Mass Damper (TMD)
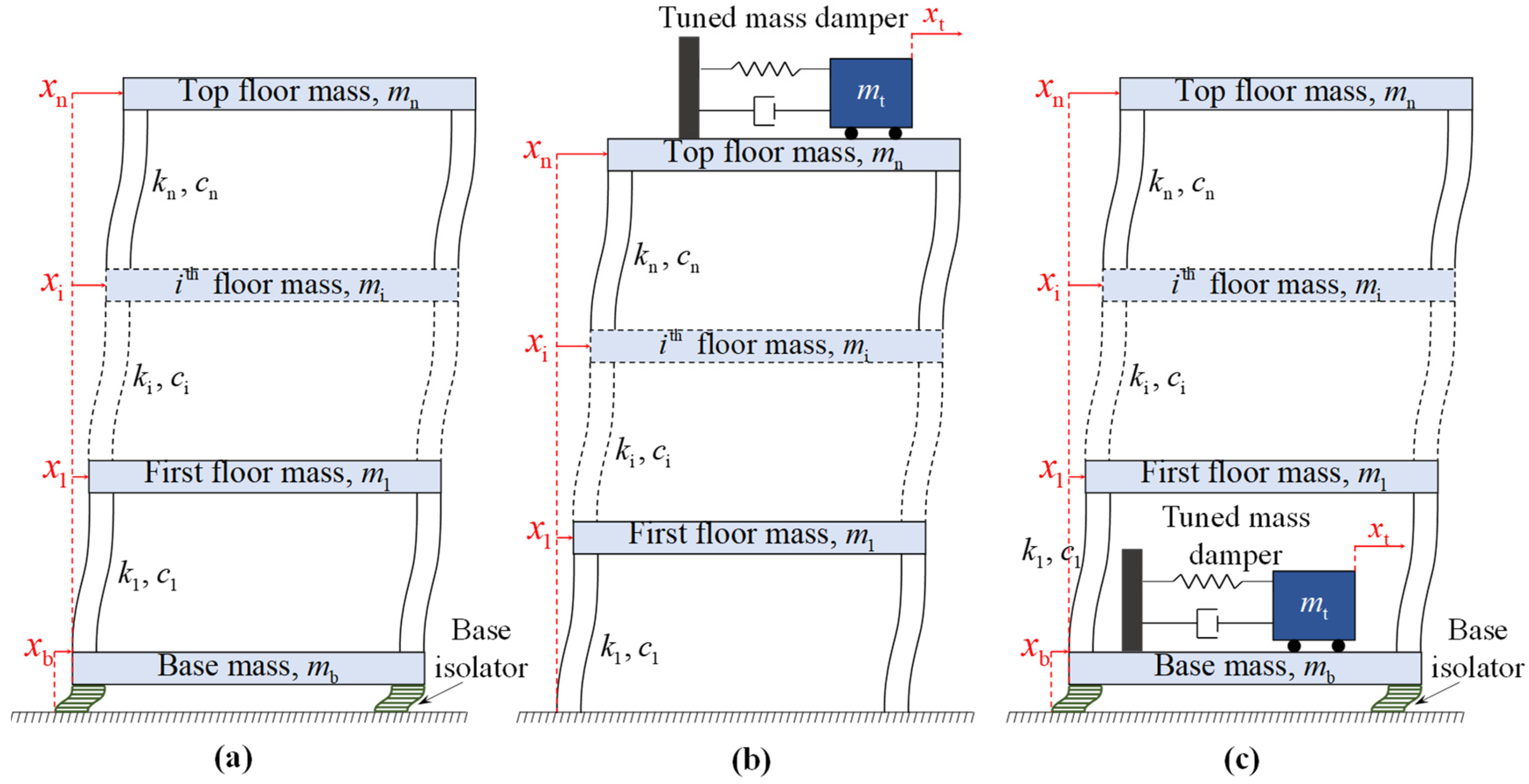
2.3. Hybrid Vibration Control System
3. Modeling of the UFREI-Isolated Hospital Building with TMD
3.1. Modeling of the Dwarka Hospital Building
3.2. Modeling and Design of the UFREI-Based Isolation System
3.3. Modeling and Design of the Tuned Mass Damper
4. Numerical Study
5. Conclusions
- It is possible to design highly flexible UFREI-based isolation systems for new and existing structures under certain site-specific conditions, with the help of the THM for representing its force–deformation behavior. For comparably taller structures, i.e., structures which exert larger vertical load on the isolation system, free sliders could be utilized to transfer the load from the superstructure to the substructure, where the UFREIs would only provide the restoring force to the structure.
- A feasible solution for the installation of the TMD in the base floor of the hospital building is presented herein. In order to accommodate such large TMD mass in the UFREI-isolated Dwarka Hospital building, the single TMD mass is divided into six identical mass blocks and each of them are attached to the structure ensuring the same tuned frequency in all the TMDs. Also, the maximum stroke length required for the designed TMD system in the MCE scenario was found to be 1.235 m, which could be easily accommodated on site.
- The design isolation time period of the UFREI-based isolation system is considered to be 6 s. This resulted in more than 90% reduction in the peak structural acceleration responses, peak base shear induced in the superstructure, and peak inter-story drifts in the superstructure, when the structure is base-isolated as compared to the uncontrolled structural responses. Reductions of this magnitude ensured that the structural vibration is always within the tolerable limits for the inhabitants, even during the earthquake excitation. This is extremely important to achieve operational condition in lifeline structures such as hospitals during the earthquake hazard.
- The addition of the TMD to the UFREI-isolated Dwarka Hospital building has successfully reduced the peak bearing displacements of the isolated structure by 9% to by 27%, under the various site-specific earthquakes. The maximum displacement of the structure at the isolation level was reduced to 438 mm from 598 mm. This is highly beneficial as it avoids the various practical and serviceability issues involved with large bearing displacements of flexible isolation systems.
- Importantly, the large reductions in the bearing displacement of the UFREI-isolated Dwarka Hospital building using the hybrid (UFREI and TMD) control systems did not compromise with the performance of the base-isolated structure. The structural responses of the hybrid (UFREI and TMD)-controlled Dwarka Hospital building are comparable to that of the UFREI-isolated building. In fact, the control performance of the hybrid-controlled building is even better than the UFREI-isolated building under most of the site-specific seismic excitations.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kelly, J.M. Aseismic base isolation: Review and bibliography. Soil Dyn. Earthq. Eng. 1986, 5, 202–216. [Google Scholar] [CrossRef]
- Naeim, F.; Kelly, J.M. Design of Seismic Isolated Structures: From Theory to Practice; John Wiley and Sons, Inc.: Hoboken, NJ, USA, 1999. [Google Scholar]
- Matsagar, V.A.; Jangid, R.S. Base isolation for seismic retrofitting of structures. Pract. Period. Struct. Des. Constr. 2008, 13, 175–185. [Google Scholar] [CrossRef]
- Kelly, J.M. Analysis of fiber-reinforced elastomeric isolators. J. Seismol. Earth-Quake Eng. 1999, 2, 19–34. [Google Scholar]
- Tsai, H.-C.; Kelly, J.M. Stiffness analysis of fiber-reinforced rectangular seismic isolators. J. Eng. Mech. 2002, 128, 462–470. [Google Scholar] [CrossRef]
- Toopchi-Nezhad, H.; Tait, M.J.; Drysdale, R.G. Bonded versus unbonded strip fiber reinforced elastomeric isolators: Finite element analysis. Compos. Struct. 2011, 93, 850–859. [Google Scholar] [CrossRef]
- Osgooei, P.M.; Tait, M.J.; Konstantinidis, D. Finite element analysis of unbonded square fiber-reinforced elastomeric isolators (FREIs) under lateral loading in different directions. Compos. Struct. 2014, 113, 164–173. [Google Scholar] [CrossRef]
- Das, A.; Dutta, A.; Deb, S.K. Performance of fiber-reinforced elastomeric base isolators under cyclic excitation. Struct. Control Health Monit. 2015, 22, 197–220. [Google Scholar] [CrossRef]
- Van Engelen, N.C.; Tait, M.J.; Konstantinidis, D. Model of the shear behavior of unbonded fiber-reinforced elastomeric isolators. J. Struct. Eng. 2015, 141, 4014169. [Google Scholar] [CrossRef]
- Van Engelen, N.C.; Tait, M.J.; Konstantinidis, D. Development of design code oriented formulas for elastomeric bearings including bulk compressibility and reinforcement extensibility. J. Eng. Mech. 2016, 142, 4016024. [Google Scholar] [CrossRef]
- Ehsani, B.; Toopchi-Nezhad, H. Systematic design of unbonded fiber reinforced elastomeric isolators. Eng. Struct. 2017, 132, 383–398. [Google Scholar] [CrossRef]
- Ngo, T.V.; Dutta, A.; Deb, S.K. Evaluation of horizontal stiffness of fibre-reinforced elastomeric isolators. Earthq. Eng. Struct. Dyn. 2017, 46, 1747–1767. [Google Scholar] [CrossRef]
- Ngo, T.V.; Deb, S.K.; Dutta, A. Effect of horizontal loading direction on performance of prototype square unbonded fibre reinforced elastomeric isolator. Struct. Control Health Monit. 2018, 25, e2112. [Google Scholar] [CrossRef]
- Banerjee, S.; Matsagar, V.A. Dynamic behavior of unbonded fiber-reinforced elastomeric isolators. In Proceedings of the 12th National Conference in Earthquake Engineering, Earthquake Engineering Research Institute (EERI), Salt Lake City, UT, USA, 27 June–1 July 2022 ; Available online: https://www.eeri.org/what-we-offer/digital-library/?lid=12723 (accessed on 3 July 2023).
- Cilento, F.; Losanno, D.; Piga, L. An experimental study on a novel reclaimed rubber compound for fiber-reinforced seismic isolators. Structures 2022, 45, 9–22. [Google Scholar] [CrossRef]
- De Domenico, D.; Losanno, D.; Vaiana, N. Experimental tests and numerical modeling of full-scale unbonded fiber reinforced elastomeric isolators (UFREIs) under bidirectional excitation. Eng. Struct. 2023, 274, 115118. [Google Scholar] [CrossRef]
- Banerjee, S.; Matsagar, V.A. A trilinear hysteretic model and design procedure for unbonded fiber-reinforced elastomeric isolators. J. Struct. Eng. ASCE, 2023; under review. [Google Scholar]
- Van Engelen, N.C. Fiber-reinforced elastomeric isolators: A review. Soil Dyn. Earthq. Eng. 2019, 125, 105621. [Google Scholar] [CrossRef]
- Toopchi-Nezhad, H.; Tait, M.J.; Drysdale, R.G. Lateral response evaluation of fiber-reinforced neoprene seismic isolators utilized in an unbonded application. J. Struct. Eng. 2008, 134, 1627–1637. [Google Scholar] [CrossRef]
- Das, A.; Deb, S.K.; Dutta, A. Shake table testing of un-reinforced brick masonry building test model isolated by U-FREI. Earthq. Eng. Struct. Dyn. 2016, 45, 253–272. [Google Scholar] [CrossRef]
- Thuyet, V.N.; Deb, S.K.; Dutta, A. Mitigation of seismic vulnerability of prototype low-rise masonry building using U-FREIs. J. Perform. Constr. Facil. 2018, 32, 4017136. [Google Scholar] [CrossRef]
- Ariga, T.; Kanno, Y.; Takewaki, I. Resonant behaviour of base-isolated high-rise buildings under long-period ground motions. Struct. Des. Tall Spec. Build. 2006, 15, 325–338. [Google Scholar] [CrossRef]
- Banerjee, S.; Matsagar, V.A. Earthquake response control of hospital building using unbonded fibre-reinforced elastomeric isolators” in Coalition for Disaster Resilient Infrastructure (CDRI) 2022 conference proceedings. Sustain. Resilient Infrastruct. 2023, 8, 85–92. [Google Scholar] [CrossRef]
- Jangid, R.S.; Kelly, J.M. Base isolation for near-fault motions. Earthq. Eng. Struct. Dyn. 2001, 30, 691–707. [Google Scholar] [CrossRef]
- Engle, T.; Mahmoud, H.; Chulahwat, A. Hybrid tuned mass damper and isolation floor slab system optimized for vibration control. J. Earthq. Eng. 2015, 19, 1197–1221. [Google Scholar] [CrossRef]
- Zelleke, D.H.; Elias, S.; Matsagar, V.A.; Jain, A.K. Supplemental dampers in base-isolated buildings to mitigate large isolator displacement under earthquake excitations. Bull. N. Z. Soc. Earthq. Eng. 2015, 48, 100–117. [Google Scholar] [CrossRef] [Green Version]
- Rayegani, A.; Nouri, G. Application of smart dampers for prevention of seismic pounding in isolated structures subjected to near-fault earthquakes. J. Earthq. Eng. 2020, 26, 4069–4084. [Google Scholar] [CrossRef]
- Rayegani, A.; Nouri, G. Seismic collapse probability and life cycle cost assessment of isolated structures subjected to pounding with smart hybrid isolation system using a modified fuzzy based controller. Structures 2022, 44, 30–41. [Google Scholar] [CrossRef]
- Matsagar, V.A.; Jangid, R. Seismic response of base-isolated structures during impact with adjacent structures. Eng. Struct. 2003, 25, 1311–1323. [Google Scholar] [CrossRef]
- Panda, J.; Chakraborty, S.; Ray-Chaudhuri, S. Development and performance evaluation of a robust suboptimal H∞-based proportional-integral controller-observer system with target tracking for better control of seismic responses. Struct. Control Health Monit. 2022, 29, e3084. [Google Scholar] [CrossRef]
- Rahmani, B.; Ziaiefar, A.; Hashemi, S. Output feedback-based adaptive fuzzy sliding mode control for seismic response reduction of base-isolated buildings. ISA Trans. 2022, 126, 94–108. [Google Scholar] [CrossRef] [PubMed]
- Elias, S.; Matsagar, V. Research developments in vibration control of structures using passive tuned mass dampers. Annu. Rev. Control 2017, 44, 129–156. [Google Scholar] [CrossRef]
- Warburton, G.B. Optimum absorber parameters for various combinations of response and excitation parameters. Earthq. Eng. Struct. Dyn. 1982, 10, 381–401. [Google Scholar] [CrossRef]
- Tsai, H.-C.; Lin, G.-C. Optimum tuned-mass dampers for minimizing steady-state response of support-excited and damped systems. Earthq. Eng. Struct. Dyn. 1993, 22, 957–973. [Google Scholar] [CrossRef]
- Sadek, F.; Mohraz, B.; Taylor, A.W.; Chung, R.M. A method of estimating the parameters of tuned mass dampers for seismic applications. Earthq. Eng. Struct. Dyn. 1997, 26, 617–635. [Google Scholar] [CrossRef]
- Hoang, N.; Fujino, Y.; Warnitchai, P. Optimal tuned mass damper for seismic applications and practical design formulas. Eng. Struct. 2008, 30, 707–715. [Google Scholar] [CrossRef]
- Elias, S.; Matsagar, V. Optimum tuned mass damper for wind and earthquake response control of high-rise building. Adv. Struct. Eng. 2015, 2, 1475–1487. [Google Scholar] [CrossRef]
- Bekdaş, G.; Nigdeli, S.M.; Yang, X.-S. A novel bat algorithm based optimum tuning of mass dampers for improving the seismic safety of structures. Eng. Struct. 2018, 159, 89–98. [Google Scholar] [CrossRef]
- Banerjee, S.; Ghosh, A. Optimal design of nonlinear TMD with Bingham-type damping for base-excited structures. J. Struct. Integr. Maint. 2020, 5, 211–222. [Google Scholar] [CrossRef]
- Banerjee, S.; Ghosh, A. Optimal design of tuned mass damper for base-excited structures. IOP Conf. Ser. Mater. Sci. Eng. 2020, 936, 12016. [Google Scholar] [CrossRef]
- Banerjee, S.; Ghosh, A.D.; Matsagar, V.A. Optimum design of nonlinear tuned mass damper for dynamic response control under earthquake and wind excitations. Struct. Control Health Monit. 2022, 29, e2960. [Google Scholar] [CrossRef]
- Sladek, J.R.; Klingner, R.E. Effect of tuned-mass dampers on seismic response. J. Struct. Eng. 1983, 109, 2004–2009. [Google Scholar] [CrossRef]
- Kwok, K.C.S.; Samali, B. Performance of tuned mass dampers under wind loads. Eng. Struct. 1995, 17, 655–667. [Google Scholar] [CrossRef]
- Murudi, M.M.; Mane, S.M. Seismic effectiveness of tuned mass damper (TMD) for different ground motion parameters. In Proceedings of the 13th World Conference on Earthquake Engineering, Vancouver, BC, Canada, 1–4 August 2004. [Google Scholar]
- Elias, S.; Matsagar, V. Wind response control of tall buildings with a tuned mass damper. J. Build. Eng. 2018, 15, 51–60. [Google Scholar] [CrossRef]
- Elias, S.; Matsagar, V.; Datta, T.K. Along-wind response control of chimneys with distributed multiple tuned mass dampers. Struct. Control Health Monit. 2019, 26, e2275. [Google Scholar] [CrossRef] [Green Version]
- Yang, J.N.; Danielians, A.; Liu, S.C.; Yang, M.J.N.; Member, A.S. Aseismic Hybrid Control Systems for Building Structures. J. Eng. Mech. 1991, 117, 836–853. [Google Scholar] [CrossRef]
- Tsai, H.-C. The effect of tuned-mass dampers on the seismic response of base-isolated structures. Int. J. Solids Struct. 1995, 32, 1195–1210. [Google Scholar] [CrossRef]
- Xiang, P.; Nishitani, A. Optimum design for more effective tuned mass damper system and its application to base-isolated buildings. Struct. Control Health Monit. 2014, 21, 98–114. [Google Scholar] [CrossRef]
- Naderpour, H.; Naji, N.; Burkacki, D.; Jankowski, R. Seismic response of high-rise buildings equipped with base isolation and non-traditional tuned mass dampers. Appl. Sci. 2019, 9, 1201. [Google Scholar] [CrossRef] [Green Version]
- Hashimoto, T.; Fujita, K.; Tsuji, M.; Takewaki, I. Innovative base-isolated building with large mass-ratio TMD at basement for greater earthquake resilience. Future Cities Environ. 2015, 1, 1–19. [Google Scholar] [CrossRef]
- De Domenico, D.; Ricciardi, G. Earthquake-resilient design of base isolated buildings with TMD at basement: Application to a case study. Soil Dyn. Earthq. Eng. 2018, 113, 503–521. [Google Scholar] [CrossRef]
- Stanikzai, M.H.; Elias, S.; Matsagar, V.A.; Jain, A.K. Seismic response control of base-isolated buildings using multiple tuned mass dampers. Struct. Des. Tall Spec. Build. 2019, 28, e1576. [Google Scholar] [CrossRef]
- Stanikzai, M.H.; Elias, S.; Matsagar, V.A.; Jain, A.K. Seismic response control of base-isolated buildings using tuned mass damper. Aust. J. Struct. Eng. 2020, 21, 310–321. [Google Scholar] [CrossRef]
- Morales, C.A. A new approach to inertial damper design to control base displacement in isolated buildings. J. Vib. Control 2021, 28, 3539–3549. [Google Scholar] [CrossRef]
- De Domenico, D.; Ricciardi, G. An enhanced base isolation system equipped with optimal tuned mass damper interter (TMDI). Earthq. Eng. Struct. Dyn. 2018, 47, 1169–1192. [Google Scholar] [CrossRef]
- Jangid, R.S. Optimum tuned inerter damper for base-isolated structures. J. Vib. Eng. Technol. 2021, 9, 1483–1497. [Google Scholar] [CrossRef]
- Nyangi, P.; Ye, K. Optimal design of dual isolated structure with supplemental tuned inerter damper based on performance requirements. Soil Dyn. Earthq. Eng. 2021, 149, 106830. [Google Scholar] [CrossRef]
- Pietrosanti, D.; De Angelis, M.; Giaralis, A. Experimental seismic performance assessment and numerical modelling of nonlinear inerter vibration absorber (IVA)-equipped base isolated structures tested on shaking table. Earthq. Eng. Struct. Dyn. 2021, 50, 2732–2753. [Google Scholar] [CrossRef]
- Huang, X.; Hu, Z.; Liu, Y.; Nie, L. Study on seismic performance of TID-LRB hybrid control system under multi-level earthquakes. Buildings 2022, 12, 1465. [Google Scholar] [CrossRef]
- Zelleke, D.H.; Matsagar, V.A. Hybrid control of smart base-isolated structures under multi-hazard scenarios. In Proceedings of the 7th European Conference on Structural Control, Warsaw, Poland, 10–13 July 2022. [Google Scholar]
- Stanikzai, M.H.; Elias, S.; Chae, Y. Recent advances in hybrid vibration-control systems. Pract. Period. Struct. Des. Constr. 2022, 27, 3122003. [Google Scholar] [CrossRef]
- Ferraioli, M.; Avossa, A.M. Base isolation seismic retrofit of a hospital building in Italy. J. Civ. Eng. Arch. 2012, 6, 308. [Google Scholar] [CrossRef] [Green Version]
- Ferraioli, M.; Mandara, A. Base isolation for seismic retrofitting of a multiple building structure: Design, construction, and assessment. Math. Probl. Eng. 2017, 2017, 4645834. [Google Scholar] [CrossRef] [Green Version]
- Rawat, A.; Ummer, N.; Matsagar, V. Performance of bi-directional elliptical rolling rods for base isolation of buildings under near-fault earthquakes. Adv. Struct. Eng. 2018, 21, 675–693. [Google Scholar] [CrossRef]
- Rawat, A.; Matsagar, V. Seismic analysis of liquid storage tank using oblate spheroid base isolation system based on rolling friction. Int. J. Non-Linear Mech. 2022, 147, 104186. [Google Scholar] [CrossRef]
- Shahabi, A.B.; Ahari, G.Z.; Barghian, M. Base isolation systems—A state of the art review according to their mechanism. J. Rehabil. Civ. Eng. 2020, 8, 37–61. [Google Scholar] [CrossRef]
- Soong, T.T.; Dargush, G.F. Passive Energy Dissipation Systems in Structural Engineering; John Wiley and Sons, Inc.: Hoboken, NJ, USA, 1997. [Google Scholar]
- Li, A. Vibration Control for Building Structures: Theory and Applications; Springer International Publishing: Berlin/Heidelberg, Germany, 2020. [Google Scholar]
- Madhekar, S.; Matsagar, V. Passive Vibration Control of Structures; CRC Press: Boca Raton, FL, USA, 2022. [Google Scholar] [CrossRef]
- IS 875 (Part 2): 1987; Design Loads (Other Than Earthquake) for Buildings and Structures—Code of Practice: Part 2 Imposed Loads. Bureau of Indian Standards: New Delhi, India, 1987.
- Chopra, A.K. Dynamics of Structures: Theory and Applications to Earthquake Engineering; Prentice Hall of India: New Delhi, India, 2006. [Google Scholar]
- Griffis, L.G. Serviceability Limit States under Wind Load; American Institute of Steel Construction: Chicago, IL, USA, 1993. [Google Scholar]
- Jangid, R.S. Optimum multiple tuned mass dampers for base-excited undamped system. Earthq. Eng. Struct. Dyn. 1999, 28, 1041–1049. [Google Scholar] [CrossRef]
- IS 1893 (Part 1): 2016; Criteria for Earthquake Resistant Design of Structures—Code of Practice: Part 1 General Provisions and Buildings. Bureau of Indian Standards: New Delhi, India, 2016.
- SeimoMatch. SeimoMatch, Version 2022, Release 1. Computer Software. Available online: https://seismosoft.com/products/seismomatch/ (accessed on 12 August 2022).
- Boggs, D. Acceleration indexes for human comfort in tall buildings—Peak or RMS? Counc. Tall Build. Urban Habitat Res. Pap. 1997, 13, 1–21. [Google Scholar]
- Galambos, T.V.; Ellingwood, B. Serviceability limit states: Deflection. J. Struct. Eng. 1986, 112, 67–84. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Earthquake Name | Year | Type of Earthquake Record | Recording Station | Component | Original PGA (g) | Scaled PGA (g) | Duration (s) |
|---|---|---|---|---|---|---|---|---|
| EQ1 | Kobe | 1995 | Far fault | JMA | NS | 0.82 | 0.49 | 150.0 |
| EQ2 | Northridge | 1994 | Far fault | Sylmar Converter Station | 360 | 0.83 | 0.46 | 60.0 |
| EQ3 | San Fernando | 1971 | Far fault | Pacoima Dam | S74W | 1.05 | 0.45 | 41.7 |
| EQ4 | Uttarkashi | 1991 | Far fault | Uttarkashi | N15W | 0.24 | 0.42 | 39.9 |
| EQ5 | Landers | 1992 | Near fault | Lucerne Valley | Parallel | 0.65 | 0.53 | 60.0 |
| EQ6 | Northridge | 1992 | Near fault | Newhall | Parallel | 0.80 | 0.47 | 49.3 |
| EQ7 | Northridge | 1992 | Near fault | Sylmar | Normal | 0.73 | 0.51 | 60.0 |
| EQ8 | Northridge | 1992 | Near fault | Sylmar | Parallel | 0.59 | 0.41 | 60.0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Banerjee, S.; Matsagar, V. Hybrid Vibration Control of Hospital Buildings against Earthquake Excitations Using Unbonded Fiber-Reinforced Elastomeric Isolator and Tuned Mass Damper. Buildings 2023, 13, 1724. https://doi.org/10.3390/buildings13071724
Banerjee S, Matsagar V. Hybrid Vibration Control of Hospital Buildings against Earthquake Excitations Using Unbonded Fiber-Reinforced Elastomeric Isolator and Tuned Mass Damper. Buildings. 2023; 13(7):1724. https://doi.org/10.3390/buildings13071724
Chicago/Turabian StyleBanerjee, Sarranya, and Vasant Matsagar. 2023. "Hybrid Vibration Control of Hospital Buildings against Earthquake Excitations Using Unbonded Fiber-Reinforced Elastomeric Isolator and Tuned Mass Damper" Buildings 13, no. 7: 1724. https://doi.org/10.3390/buildings13071724