
Fixed-Point Convergence of Multi-Valued Non-Expansive Mappings with Applications

1
Department of Mathematics, Grand Asian University, Sialkot 7KM, Pasrur Road, Sialkot 51310, Pakistan
2
Department of Mathematics and Statistics, International Islamic University, Islamabad 44000, Pakistan
3
Department of Mathematics and Statistics, College of Science, Imam Mohammad Ibn Saud Islamic University (IMSIU), Riyadh 11623, Saudi Arabia
*
Author to whom correspondence should be addressed.
†
These authors contributed equally to this work.
Axioms 2023, 12(11), 1020; https://doi.org/10.3390/axioms12111020
Submission received: 6 September 2023
/
Revised: 25 October 2023
/
Accepted: 26 October 2023
/
Published: 29 October 2023
(This article belongs to the Special Issue Research on Fixed Point Theory and Application)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:This paper is dedicated to the advancement of fixed-point results for multi-valued asymptotically non-expansive maps regarding convergence criteria in complete uniformly convex hyperbolic metric spaces that are endowed with a graph. The famous fixed-point theorems of Goebel and Kirk, Khamsi and Khan, along with other recent results in the literature can be obtained as corollaries of these main results. A nice graph and an interesting example are also provided in support of the hypothesis of the main results.
Keywords:
-asymptotically non-expansive mapping; uniformly convex hyperbolic metric space; Mann iteration process; multi-valued mapping; directed graphsMSC:
47H10; 47E10; 05C201. Introduction
In 1964, Edelstein [1] proposed the existence of a fixed point (FP) in a non-expansive mapping T with a non-empty T-closure. The basic concept of asymptotically non-expansive mappings was first introduced and thoroughly explained by Goebel and Kirk [2]. After this, many authors proved various FP results by using a class of asymptotically non-expansive mappings. Some of these contributions are listed here:
In 1969, Nadler [7] presented an FP result for multi-valued contractions. This article brought a revolution in the area of FP theory, as well as applications in multiple disciplines. (For more details, readers are referred to [8,9].) Khan et al. [10] evaluated the common FPs for the two multi-valued non-expansive mappings in hyperbolic spaces by using a unit-step implicit algorithm. Zhang et al. [11] proved the strong convergence result for multi-valued total Bregmann quasi-asymptotically non-expansive mappings. In [12], Khamsi and Khan generalized the results of [2] by introducing the class of multi-valued asymptotically non-expansive mappings.
In 2008, Jachymski [13] presented an innovative generalization of the Banach contraction principle by merging the notions of FP theory with graph theory. Furthermore, Beg et al. [14] utilized the idea of Jachymski toward the general class of multi-valued contractions. In 2015, Alfuraidan and Khamsi [15] proved an existence result for the newly introduced structure of a monotone, which increased the G-non-expansive mappings in the setting of hyperbolic metric spaces. In [16], Panyanak and Suantai provided an extension of Wangkeeree and Preechasilp’s result [17] by utilizing multi-valued non-expansive mappings. In [18], Anakkamatee and Tongnoi extended Browder’s convergence result for the collection of -non-expansive mappings in spaces. In [19], Chifu et al. applied an FP theorem for an appropriate operator on the Cartesian product of a b-metric space in the presence of a graph. Afterward, numerous FP results for generalized metric spaces have been equipped with graphs and have flourished (see, e.g., [20,21,22,23,24]).
In this article, inspired by the abovementioned developments, some strong convergence theorems for the class of asymptotically -non-expansive mappings in the setting of uniformly convex hyperbolic metric space are presented. These results will provide the generalizations of the consequences of Goebel and Kirk [2], Khamsi and Khan [12], and many others.
2. Preliminaries
The theory of multi-valued mappings is a compelling fusion of analysis, topology, and geometry. It has been receiving an degree of important attention by researchers working in a variety of fields in the mathematical sciences. All mappings that are single-valued in traditional analysis are inherently multi-valued, whereas many problems in applied mathematics are multi-valued in nature. For example, the problems of stability and control theory can be solved with the aid of FP methods for multi-valued mappings. The inverse of a single-valued map is the first naturally occurring instance of a set-valued map. The importance of multi-valued mappings can be judged by a beginner when they look at the inverse of basic trigonometric functions (for example, , , etc., in a given domain of 0 to are multi-valued mappings).
In this article, we consider a useful metric known as the Hausdorff–Pompeiu distance function on the collection of non-empty bounded and closed subsets of a metric space to generalize some FP findings in a traditional single-valued F.P theory.
Consider two non-empty sets X and Y. Suppose we have a function T that maps elements from X to a collection of subsets in Y. For any x in X, is a set contained in Y, and this is called the image of x under T. If a point x of X is an element of , it is referred to as an FP of T. In the following, some examples of multi-valued mappings have been provided with regard to the existence and uniqueness of their FPs.
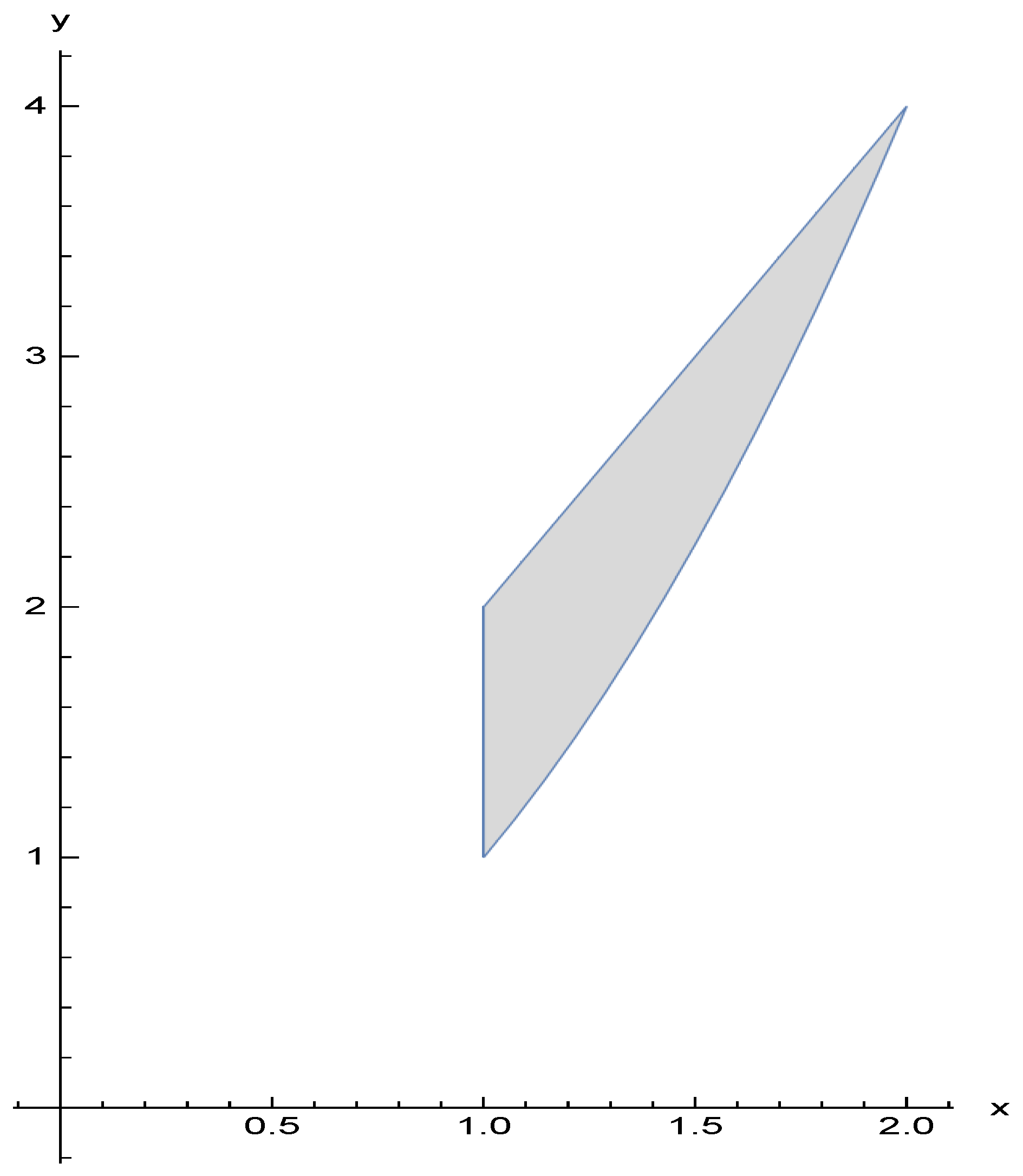
Let us start with an illustration of the usual problems involving multi-valued mappings. For the two sets X and Y, a multi-valued mapping is a set valued function from X to and the power set of Y. Consider a function , such that . Then, T is a multi-valued mapping with
Here, it should be noted that and , that is T, have FPs.
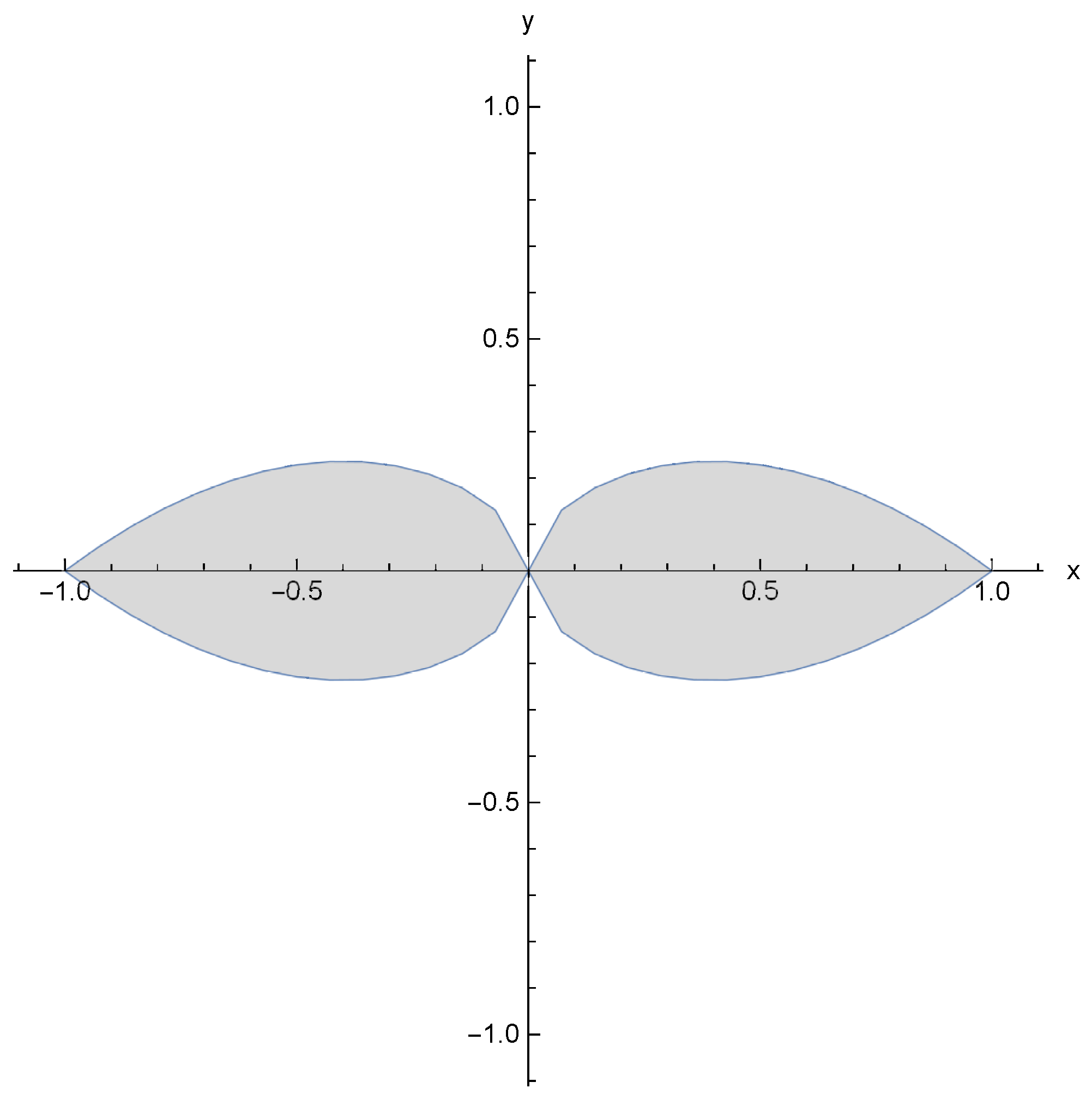
Now, for and , suppose is a multi-valued map defined as
Then, F has a unique FP , that is, .
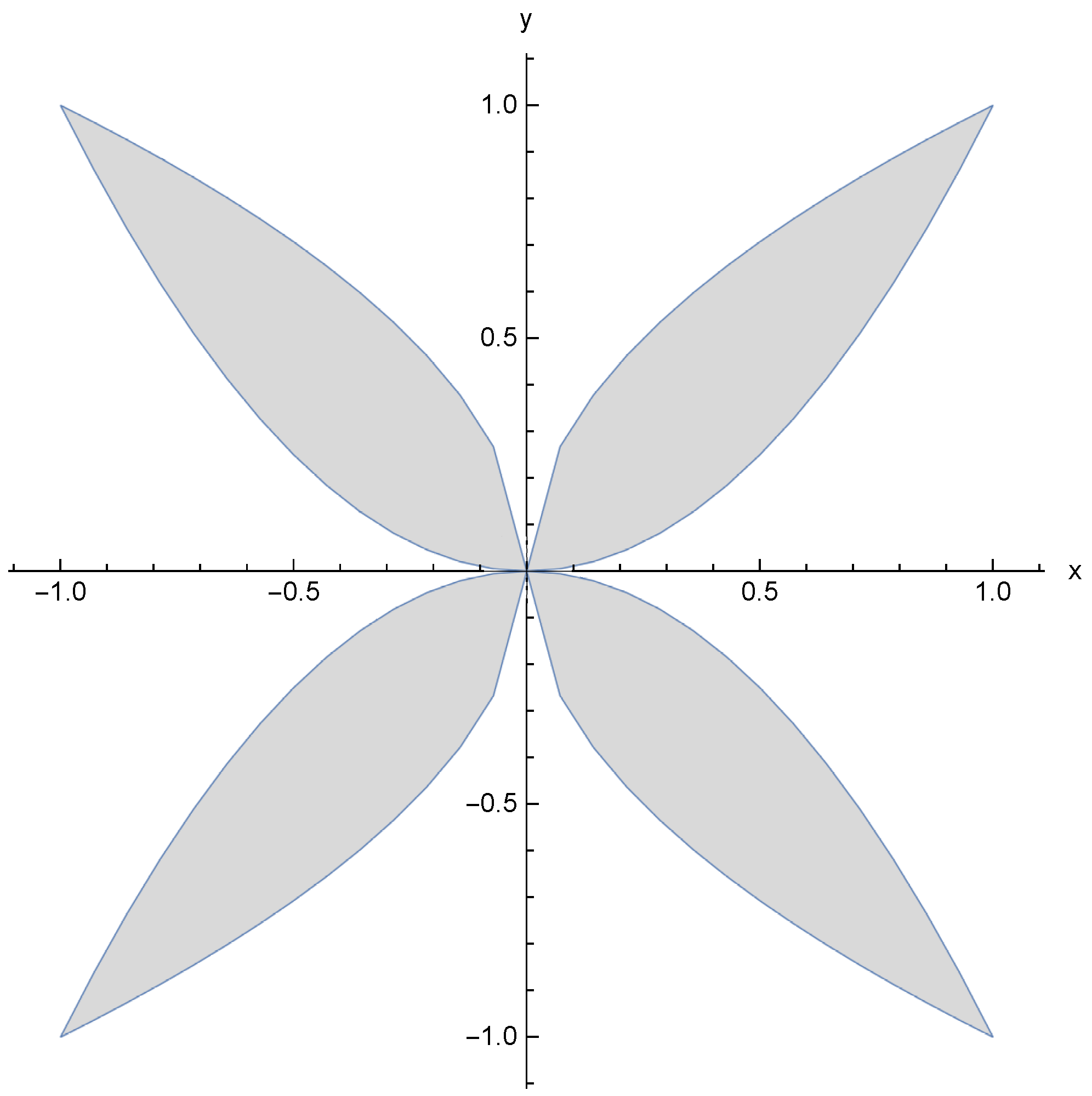
Suppose that and is defined as
Then, has infinitely many FPs for all .
Now, if and the multi-valued map are defined as
then the whole domain of H form the set of FPs.
The graphs of the functions defined by (1)–(3) are depicted below as Figure 1, Figure 2 and Figure 3, respectively. It is evident that these graphs exhibit multi-valued behavior and possess FPs.
Consider a metric space , and let A be any non-empty subset of X. We symbolize a couple of collections of subsets as follows:
- : all of the non-empty subsets of A;
- : all of the non-empty, convex, and compact subsets of A;
- : all of the non-empty, closed subsets of A;
- : all of the non-empty, closed, and bounded subsets of A;
- : all of the non-empty, closed, and convex subsets of A;
- : all of the non-empty, closed, convex, and bounded subsets of A.
Definition 1.
Let A self map g on A is named a contraction if a constant exists such that we have the following:
If the above inequality is accurate for , then the map g is called non-expansive. An FP of g is an element x in A, for which
The generalized multi-valued Hausdorff distance is given as follows:
where and .
In 1988, Assad [25] initiated the notions of an -general orbit and an -starred general orbit. These concepts were further generalized by Rus [26] in terms of a generalized orbit. Afterward, many authors utilized this idea in subsequent directions (see, for example, [8,27,28]).
Definition 2.
Let and be a multi-valued mapping. For , a generalized orbit of x is the sequence that is generated from by for any nonnegative integer n. Evidently, the generalized orbits generated from x may differ in values for a given .
Remark 1.
It was observed that, for a single-valued mapping T, the generalized orbit coincides with the conventional definition of an orbit.
The class of asymptotically non-expansive mappings has been playing a vital part in the advancement of FP theory due to it being a generalized version of non-expansive mappings ([6,9], and many others). In 2017, Khamsi and Khan [12] extended the idea of asymptotically non-expansive mappings for multi-valued cases. The authors proposed the solutions for some problems that are related to these mappings in the context of [8]. The following definition and theorems have been taken from [12]:
Definition 3.
We say that a mapping is multi-valued asymptotically non-expansive if there exists a sequence of positive real numbers such that . In addition, for any generalized orbit of x and for any , there exists a generalized orbit of y such that
where .
In simpler terms, this means that the mapping T does not increase the distances between points in X as they are iterated along their generalized orbits, and the rate at which distances increase is controlled by the sequence .
Convexity is an important concept in mathematics and optimization theory that characterizes the curved form of certain geometric shapes or functions. A set or function is said to be convex if every point on a line segment joining two points in the set or on the graph of the function lies within the set or above the graph. The concept of convexity finds broad applications in different areas, including economics, optimization, and physics. For example, convex optimization problems arise in many engineering and financial applications, and convex functions are used to model the behavior of various physical systems.
For the introduction of convex structure in metric spaces, Menger [29] considered the concept of metric segments as a vital component. The element in the metric segment was defined in terms of
where some are unique. A metric space along with these groups of segments is understood as a convex metric space. If the subsequent axiom holds
for all , and , then the space is termed a hyperbolic metric space [30].
Definition 4.
In a hyperbolic metric space , the modulus of uniform convexity is defined as per the following:
which applies for any and .
The space is understood as uniformly convex provided that , whenever and .
Throughout this article, our underlying space is supposed to be a complete uniformly convex hyperbolic metric space, which is abbreviated as CUCHMS.
Theorem 1
([12]). For CUCHMS X, the following assertions hold.
- 1.
- X has the property , i.e., any decreasing sequence of non-empty, convex, bounded, and closed sets that have a non-empty intersection.
- 2.
- If then any type function attains a minimal point u in Z that is unique, thereby satisfyingFurthermore, any minimizing sequence in Z is convergent, that is, .
- 3.
- Let and . Suppose and are any two arbitrary sequences in X satisfyingandthen .
Definition 5.
Consider a multi-valued mapping and a sequence in C. Then, T is called H-continuous if whenever converges to x in C, we have
for any sequence , where belongs to the set , for all .
Remark 2.
- 1.
- In the case of a compact valued operator T, H-continuity coincides with the lower and upper semi-continuity.
- 2.
- An asymptotically non-expansive map always fulfills the criterion of H-continuity.
Theorem 2.
Let Then, an asymptotically non-expansive map attains an FP.
According to [13], the following concepts are defined with respect to CUCHMS.
Let symbolize the diagonal of the Cartesian product . Suppose that characterizes a directed graph (whereby represents vertices, and represents edges), which includes all the loops when assuming that does not have any parallel edges, and where the symbol designates the undirected graph associated with .
Definition 6.
A self map on X is known as the Banach -contraction if it fulfills the following axioms
- 1.
- The edges of under are preserved, that is, for all elements in X, such that
- 2.
- The corresponding weights of edges of under decrease in a subsequent manner, that is, an element exists by satisfying
3. Convergence Results for Multi-Valued -Asymptotically Non-Expansive Mappings
In this section, we define the notion of multi-valued -asymptotically non-expansive mappings by combining the concept of asymptotically non-expansive mappings with a graph. We also list two main conditions (namely and ), which will be utilized further. In 2017, an extension of Goebel and Kirk’s FP theorem for multi-valued asymptotically non-expansive mappings has been proposed by Khamsi and Khan [12]. Inspired by this work, we are also extending this classical result for the class of multi-valued -asymptotically non-expansive mappings in the setting of CUCHMS.
Definition 7
(Multi-valued -Asymptotically Non-expansive Mapping). Let represent a directed graph on X. Then, a mapping is said to be a multi-valued -asymptotically non-expansive mapping if the following conditions hold:
- 1.
- There exists with ;
- 2.
- preserves the edges, that is,where is an element of and belongs to
- 3.
- Let q and r be any two elements of X. Then, for any generalized orbit of q, there exists a generalized orbit of r such that and
Condition ). Let represent a directed graph on X. Let and be a generalized orbit of q in X. Then, the type function
attains a minimum point z in Z, which is unique, that is, for any convergent minimizing sequence in Z, where
Condition (). Let represent a directed graph on X and . Let and be the generalized orbit of q. Then, for , we have
- (i)
- ,
- (ii)
- .
Theorem 3.
Let be the directed graph on X, and let , such that . Let , and, for any let be a generalized orbit of q that satisfies Condition (), such that . If is an H-continuous -asymptotically non-expansive mapping, then has an FP.
Proof.
Suppose that and is a generalized orbit of The boundedness of Z ensures the boundedness of . Consider a type function produced by , that is, . By Condition , has a unique minimum point in Z. Let . Then, by Condition , we have . Since is -asymptotically non-expansive, one has
This ensures that is for all . Since , we achieve that is a minimizing sequence for as well. Again, by utilizing Condition , we obtain that is convergent to . Then, the H-continuity of and for any implies the following:
Since is closed and is convergent toward , we determine that z exists in , thus indicating that is the FP of . □
Before stating the next result, we will form a sequence with the help of generalized orbits and Condition . This formation will be utilized in the upcoming result.
Let , be a -asymptotically non-expansive mapping with and . Suppose is a generalized orbit of .
Set , then, by Condition , we have
- (i)
- ;
- (ii)
- .
Assume that is the generalized orbit of . Since is a -asymptotically non-expansive mapping, we therefore have
Set . Then, again by Condition , we obtain
- (i)
- (ii)
and also
By repeating the above steps, we create a sequence in Z and respectively for any as the generalized orbit of thereby satisfying
and
Theorem 4.
Let be the directed graph on X, and let . Let be a -asymptotically non-expansive mapping. Assume that is an FP of , thereby satisfying . Assume that
- (i)
- is the Lipschitz sequence associated with and
- (ii)
- the series is convergent.
Suppose , , is a generalized orbit of and , and let this be the sequence generated by Equation (4), such that for each . Then,
thus implying , that is, that will be an approximated FP sequence of .
Proof.
In view of we have
Using Equation (4) and the definition of CUCHMS, we obtain
From the above inequality, we obtain
for any and , which indicates the diameter. As we have
we can write
for any By letting s approach infinity, one obtains
Now, by letting t approach infinity, and by using the given assumption, we have
thus implying the convergence of the sequence Assume that .
If , then it follows from Inequality (5) that
Then,
By using Theorem 1,
Now, consider the case for By repeating the above steps, we have
With the selection of our generalized orbits, we now assert that
Evidently, we now have
for any , which ultimately implies
□
4. Some Consequences of the Convergence Results
This section highlights the corollaries derived from the main results. As a consequence of Theorem 4, we obtained the famous result established by Khamsi and Khan (Theorem 2.4, [12]).
Corollary 1.
Let and be assumed as asymptotically non-expansive mappings. Suppose
- (i)
- is a Lipschitz sequence associated with , and that
- (ii)
- the sequence converges.
For a fixed and , consider a sequence that is generated by
where is a generalized orbit of . Then,
which implies , that is, is an approximated FP of .
Proof.
By assuming , all of the conditions of Theorem 4 are fulfilled, and the process is completed. □
Remark 3.
Theorem 3 is a generalized version of the classical FP result by Goebel and Kirk (Theorem 1, [2]) for the multi-valued mappings that are endowed with graphs and are defined on a nonlinear domain.
Example 1.
Let be a CUCHMS and . Assume that is the directed graph on X with , and is defined as
Let . For and , we have . Hence, is an example of edge preservation. Now, we show that, for any and any generalized orbit of q, there exists a generalized orbit of r, such that , and thus we have
Let and be generalized orbits of q and r, respectively, where there are and . Take and , so that . Now, to prove (7), we have multiple cases for values of h.
Case 2:
For , (7) reduces to
Now, for , we have (9) as . Using and , we obtain , then and . Thus, we have
For , we have (9) as . For and , we have . Similarly, for , we have , which implies . Thus, we can say that
where implies that (9) holds.
Case 3:
For , on similar lines of the abovementioned case, we have
where .
Hence, generalizing the above process for , we have
where , for all and . Also, implies (7). Thus, is a -asymptotically non-expansive mapping. Clearly, is a FP of . Thus, satisfying and is the Lipschitz sequence that is associated with , and the series is convergent. As a result, the presumptions of Theorem 4 are all true. Moreover, suppose and , where is the generalized orbit of and . Set
For and by Condition , we have . Since is an -asymptotically non-expansive mapping with , we thus have the inequality
Now, assume that and is its generalized orbit. Then, and . By setting , we have . Again, by Condition , we have and
Suppose that and are its generalized orbit. Then, . Following the above procedure, we can generalize the inequality as follows:
Open Problem: On similar lines, one can also define the idea of -total asymptotically non-expansive mappings and prove convergence theorems in Hadamard spaces, as well as in convex hyperbolic metric spaces.
5. Conclusions
Some thoughtful research for multi-valued mappings happened in the middle of 19th century, which is when mathematicians realized that their needs go far beyond a modest improvement of single-valued mappings. This paper concludes that an H-continuous -asymptotically non-expansive multi-valued mapping has an FP under assured circumstances in uniformly convex hyperbolic metric spaces. As a result, the FP theorems provided by Goebel and Kirk [2], Khamsi and Khan [12], and many others have been generalized. Some consequences are also presented, which highlight the practical implications of our findings. Additionally, an application of one of our results is provided in the context of the Nash equilibrium, which underscores the versatility of our contributions. An attractive example, some captivating graphs, and an interesting open problem for Hadamard spaces are also provided to attract new investigations in this field of exploration.
Author Contributions
Conceptualization, A.A.; formal analysis, A.A.; investigation, A.K. and M.R.; writing—original draft preparation, A.A., M.R., A.K. and F.A.; writing—review and editing, A.K. and F.A.; supervision, A.A.; funding acquisition, F.A. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported and funded by the Deanship of Scientific Research at Imam Mohammad Ibn Saud Islamic University (IMSIU) (grant number IMSIU-RP23070).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
The authors would like to thank the Deanship of Scientific Research at Imam Mohammad Ibn Saud Islamic University (IMSIU) (grant number IMSIU-RP23070).
Conflicts of Interest
The authors have clearly stated that they have no competing financial interest or personal relationships that could potentially influence their work. The funder was involved in the writing and editing of the manuscript.
References
- Edelstein, M. On nonexpansive mappings. Proc. Am. Math. Soc. 1964, 15, 689–695. [Google Scholar] [CrossRef]
- Goebel, K.; Kirk, W.A. A fixed point theorem for asymptotically nonexpansive mappings. Proc. Am. Math. Soc. 1972, 35, 171–174. [Google Scholar] [CrossRef]
- Nanjaras, B.; Panyanak, B. Demiclosed principle for asymptotically nonexpansive mappings in CAT(0) spaces. Fixed Point Theory Appl. 2010, 2010, 268780. [Google Scholar] [CrossRef]
- Alber, Y.; Chidume, C.E.; Zegeye, H. Approximating fixed points of total asymptotically nonexpansive mappings. Fixed Point Theory Appl. 2006, 2006, 10673. [Google Scholar] [CrossRef]
- Alfuraidan, M.; Khamsi, M. A fixed point theorem for monotone asymptotically nonexpansive mappings. Proc. Am. Math. Soc. 2018, 146, 2451–2456. [Google Scholar] [CrossRef]
- Kalsoom, A.; Rashid, M.; Sun, T.C.; Bibi, A.; Ghaffar, A.; Inc, M.; Aly, A.A. Fixed points of monotone total asymptotically nonexpansive mapping in hyperbolic space via new algorithm. J. Funct. Spaces 2021, 2021. [Google Scholar] [CrossRef]
- Nadler, S.B., Jr. Multivalued contraction mappings. Pac. J. Math. 1969, 30, 475–488. [Google Scholar] [CrossRef]
- Khamsi, M.A.; Kirk, W.A. On uniformly Lipschitzian multivalued mappings in Banach and metric spaces. Nonlinear Anal. 2010, 72, 2080–2085. [Google Scholar] [CrossRef]
- Fukhar-ud-din, H.; Kalsoom, A. Fixed point approximation of asymptotically nonexpansive mappings in hyperbolic spaces. Fixed Point Theory Appl. 2014, 2014, 64. [Google Scholar] [CrossRef]
- Khan, S.H.; Fukhar-ud-din, H.; Kalsoom, A. Common fixed points of two multivalued nonexpansive maps by a one-step implicit algorithm in hyperbolic spaces. Mat. Vesn. 2014, 66, 397–409. [Google Scholar]
- Zhang, S.S.; Wang, L.; Zhao, Y.H.; Wang, G. Strong convergence of multivalued Bregman totally quasiasymptotically nonexpansive mappings. Acta Math. Sin. 2015, 58, 213–226. (In Chinese) [Google Scholar]
- Khamsi, M.A.; Khan, A.R. Goebel and Kirk fixed point theorem for multivalued asymptotically nonexpansive mappings. Carpathian J. Math. 2017, 33, 335–342. [Google Scholar] [CrossRef]
- Jachymski, J. The contraction principle for mappings on a metric space with a graph. Proc. Am. Math. Soc. 2008, 136, 1359–1373. [Google Scholar] [CrossRef]
- Beg, I.; Butt, A.R.; Radojevic, S. The contraction principle for set valued mappings on a metric space with a graph. Comput. Math. Appl. 2010, 60, 1214–1219. [Google Scholar] [CrossRef]
- Alfuraidan, M.R.; Khamsi, M.A. Fixed points of monotone nonexpansive mappings on a hyperbolic metric space with a graph. Fixed Point Theory Appl. 2015, 2015, 44. [Google Scholar] [CrossRef]
- Panyanak, B.; Suantai, S. Viscosity approximation methods for multivalued nonexpansive mappings in geodesic spaces. Fixed Point Theory Appl. 2015, 2015, 114. [Google Scholar] [CrossRef]
- Wangkeeree, R.; Preechasilp, P. Viscosity approximation methods for nonexpansive mappings in CAT(0) spaces. J. Inequalities Appl. 2013, 2013, 93. [Google Scholar] [CrossRef]
- Tongnoi, B.; Anakkamatee, W. Convergence theorems for G-nonexpansive mappings in CAT(0) spaces endowed with graphs. Thai J. Math. 2019, 17, 775–787. [Google Scholar]
- Chifu, C.; Karapinar, E.; Petrusel, G. Qualitative properties of the solution of a system of operator inclusions in b-metric spaces endowed with a graph. Bull. Iran. Math. Soc. 2018, 44, 1267–1281. [Google Scholar] [CrossRef]
- Tiammee, J.; Kaewkhao, A.; Suantai, S. On Browder’s convergence theorem and Halpern iteration process for G-nonexpansive mappings in Hilbert spaces endowed with graphs. Fixed Point Theory Appl. 2015, 2015, 187. [Google Scholar] [CrossRef]
- Hunde, T.W.; Sangago, M.G.; Zegeye, H. Approximation of a common fixed point of a family of G-nonexpansive mappings in Banach spaces with a graph. Int. J. Adv. Math. 2017, 6, 137–152. [Google Scholar]
- Kangtunyakarn, A. The variational inequality problem in Hilbert spaces endowed with graphs. J. Fixed Point Theory Appl. 2020, 22, 4. [Google Scholar] [CrossRef]
- Karapinar, E. Fixed point theorems in uniform space endowed with graph. Miskolc Math. Notes 2017, 18, 57–69. [Google Scholar]
- Wen, D.J. Weak and strong convergence theorems of G-monotone nonexpansive mapping in Banach spaces with a graph. Numer. Funct. Anal. Optim. 2019, 40, 163–177. [Google Scholar] [CrossRef]
- Assad, N.A. Approximation for fixed points of multivalued contractive mappings. Math. Nachrichten. 1988, 139, 207–213. [Google Scholar] [CrossRef]
- Rus, I.A. Basic problems of the metric fixed point theory revisited (II). Studia Univ. Babes-Bolyai Math. 1991, 36, 81–99. [Google Scholar]
- Petrusel, A. Multivalued weakly Picard operators and applications. Sci. Math. Japan. 2004, 59, 169–202. [Google Scholar]
- Rus, I.A.; Petrusel, A.; Sintamarian, A. Data dependence of fixed points set of some multivalued weakly Picard operatos. Nonlinear Anal. 2003, 52, 1947–1959. [Google Scholar] [CrossRef]
- Menger, K. Untersuchungen über allgemeine Metrik. Math. Ann. 1928, 100, 75–163. [Google Scholar] [CrossRef]
- Reich, S.; Shafrir, I. Nonexpansive iterations in hyperbolic spaces. Nonlinear Anal. Theory Methods Appl. 1990, 15, 537–558. [Google Scholar] [CrossRef]
Figure 1.
Graphical representation of the unique FPs of the mapping, as defined by (1).
Figure 1.
Graphical representation of the unique FPs of the mapping, as defined by (1).

Figure 2.
Visualization of the numerous FPs of the mapping, as defined by (2).
Figure 2.
Visualization of the numerous FPs of the mapping, as defined by (2).

Figure 3.
Illustration of the infinitely many FPs of the mapping, as defined by (3).
Figure 3.
Illustration of the infinitely many FPs of the mapping, as defined by (3).

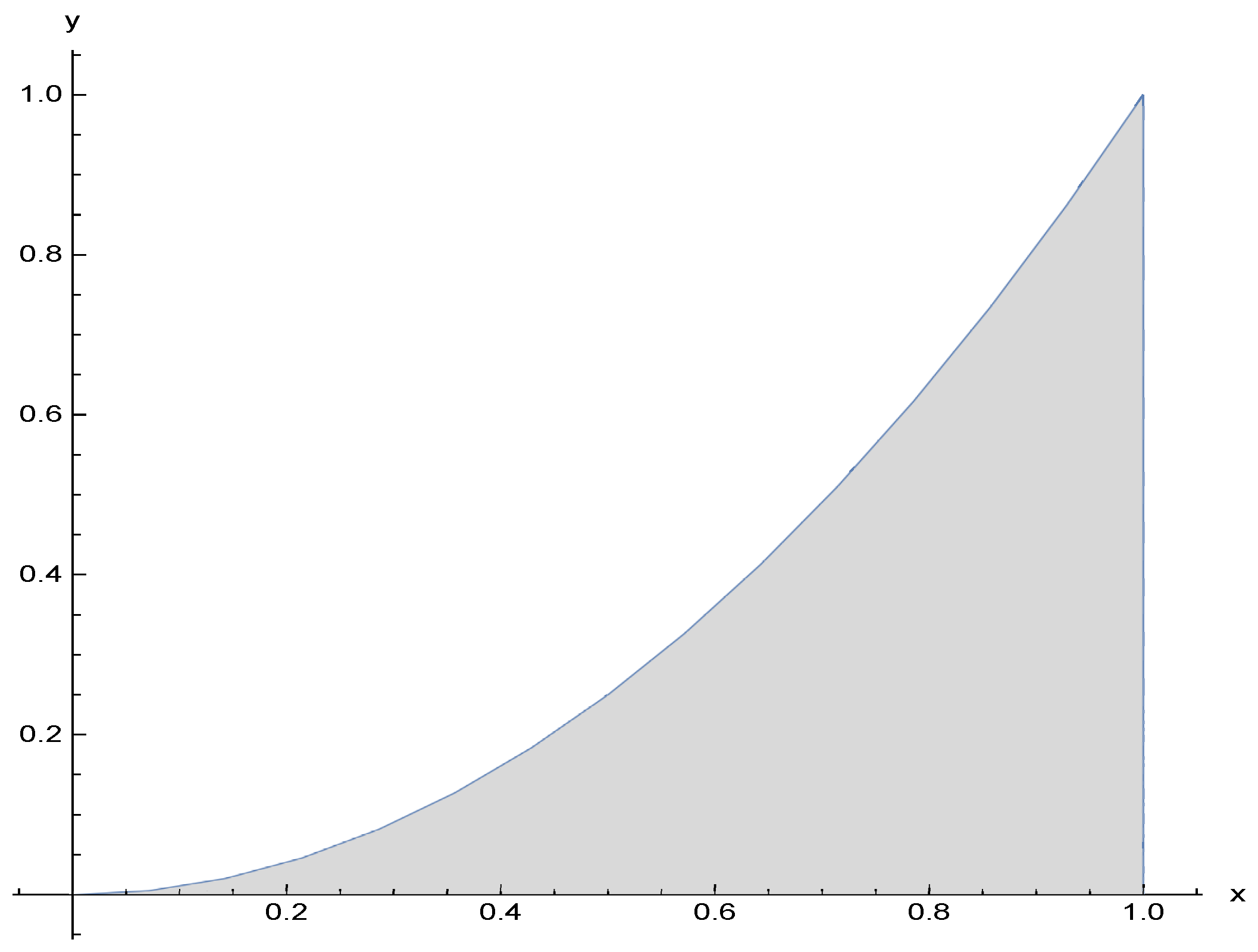
Figure 4.
Representation of multi-valued -asymptotically non-expansive mapping, as defined by (6).
Figure 4.
Representation of multi-valued -asymptotically non-expansive mapping, as defined by (6).

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Azam, A.; Rashid, M.; Kalsoom, A.; Ali, F. Fixed-Point Convergence of Multi-Valued Non-Expansive Mappings with Applications. Axioms 2023, 12, 1020. https://doi.org/10.3390/axioms12111020
AMA Style
Azam A, Rashid M, Kalsoom A, Ali F. Fixed-Point Convergence of Multi-Valued Non-Expansive Mappings with Applications. Axioms. 2023; 12(11):1020. https://doi.org/10.3390/axioms12111020
Chicago/Turabian StyleAzam, Akbar, Maliha Rashid, Amna Kalsoom, and Faryad Ali. 2023. "Fixed-Point Convergence of Multi-Valued Non-Expansive Mappings with Applications" Axioms 12, no. 11: 1020. https://doi.org/10.3390/axioms12111020
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.