


A Procedure for Constructing the Solution of a Nonlinear Fredholm Integro-Differential Equation of Second Order



Mechanical Engineering Department, Rio de Janeiro State University, São Fco Xavier Street 524, Rio de Janeiro 20550-013, Brazil
*
Author to whom correspondence should be addressed.
Axioms 2022, 11(12), 672; https://doi.org/10.3390/axioms11120672
Submission received: 23 October 2022
/
Revised: 19 November 2022
/
Accepted: 23 November 2022
/
Published: 26 November 2022
(This article belongs to the Special Issue Computational and Mathematical Methods in Science and Engineering)
Abstract
:In this work, a large class of integro-differential equations, arising from the description of heat transfer problems, is considered, particularly the nonlinear equations. We propose a procedure for constructing their solution in a very simple and reliable way in which the only needed tool is the same one employed to solve a linear second-order ordinary differential equation, subject to Robin boundary conditions. Proofs of the convergence, existence, and uniqueness are presented. Some special cases are simulated to illustrate the proposed tools.
Keywords:
integro-differential equation; solution construction; application to heat transfer problemsMSC:
34B99; 80A21; 80A051. Introduction
In this work, the solution of a Fredholm integro-differential equation is represented as the limit of a sequence whose elements can be obtained from the minimization of quadratic functionals.
The integro-differential problem to be considered here has, as a particular case, the mathematical description of the heat transfer process in symmetrical sets of fins subjected to thermal radiation heat exchange.
In fact, any heat transfer problem involving nonconvex fins (or symmetrical sets of fins) at high temperature levels needs to consider thermal radiant heat transfer from/to the fin. The amount of reflected or emitted thermal radiation from a fin, directly reaching this same fin (or the same set of fins), is represented by an integral operator in the governing equation, giving rise to a second order integro-differential equation. The problems involving thermal radiation heat transfer are inherently nonlinear.
The procedure to be employed for constructing the exact solution may be used for obtaining approximations, for instance, by means of a finite difference scheme or by means of a finite element approximation (taking advantage of the quadratic functional).
Due to its applications in several areas of physics, mathematics, and engineering, Fredholm integro-differential equations continue to be an area of interest.
In the last two decades, their numerical simulations and mathematical analysis have been found with great frequency in scientific articles. Several procedures for solving integro-differential equations have been used, for instance, the Taylor polynomial approach [1,2], block-pulse functions [2,3], the CAS wavelet operational matrix [4,5,6], the Tau method [7], the Spectral Homotopy Analysis method [8,9], the Legendre collocation method [10], the Chebyshev finite difference method [11], the Decomposition Method [12], the Pade approximant [13], and other procedures [14,15].
The main contribution of this work lies in the extreme simplicity of the proposed procedure. It is presented a simple and reliable way to construct the exact solution for a given class of nonlinear Fredholm integro-differential equations, subject to Robin boundary conditions. The mentioned procedure can be also used to carry out numerical simulations for the considered equations. The required tools are available to any undergraduate engineering student.
2. The Considered Problem
The main subject of this work is the problem represented in Equation (1), which generalizes the mathematical description of nonconvex sets of cylindrical fins [16,17,18,19,20,21], in which there is direct thermal radiant interchange among points (far positioned) of these fins. The main objective is to find the function , the solution of
in which and are positive constants, while and are nonnegative constants. In addition,
by means of a sequence whose elements can be easily obtained.
For instance, when problem (1) represents the heat transfer process in a set of two parallels fins, the kernel is given by [22].
in which is the distance between the fins, and is the length of each fin.
When problem (1) represents the heat transfer process in a set of two fins (with an angle ), the kernel is given by [22].
For a porous fin, the function is usually given by [20].
The function plays the role of an external source. Many times, it is assumed to be zero everywhere [27].
3. The Solution Is Nonnegative
Aiming to prove that the solution of (1), denoted here by , is nonnegative everywhere, let us begin by assuming that has a minimum within the interval . Denoting by the point at which the minimum is reached, we have in a small vicinity [28,29] of this point that
Taking into account (2), we may write
Therefore, denoting by the minimum value of , we have (within the considered vicinity)
On the other hand, let us assume that does not assume a minimum for . In this case, we must have the minimum at or at . If the minimum is reached at , then the derivative of is nonnegative at ; hence,
and if the minimum is reached at , then the derivative of is nonpositive at ; thus,
Hence, it is ensured that the solution of (1), denoted by , is nonnegative everywhere.
4. An Upper Bound for the Solution
Let us assume that assumes its maximum at the (interior) point . In a sufficiently small neighborhood of this point, we have
Hence,
The above inequality consists of an upper bound for , provided it assumes a maximum for .
On the other hand, let us assume that does not reach a maximum for . In this case, we must have the maximum at or at . If the maximum is reached at , then the derivative of is nonpositive at ; so,
and if the maximum is reached at , then the derivative of is nonnegative at ; hence,
Therefore, we are able to evaluate an upper bound for the solution of (1), denoted by . This value will be the larger one among , , and , in which is the (unique) root of the equation below.
5. Solution Construction
The solution of problem (1), denoted here by , is given by the limit of the sequence , whose elements are given by
in which and is a (large) positive constant. In other words,
6. The Behavior of the Sequence and the Constant
In order to show that is a non-decreasing sequence, the first step is to show that is nonnegative everywhere. For this, let us consider and write
Suppose that assumes a minimum for . In this case, within a sufficiently small vicinity of the point , in which reaches its minimum, we must have (denoting the minimum by ).
On the other hand, if assumes its minimum at , we must have
while, if the minimum is reached at , we have
Therefore, the minimum of is nonnegative. In other words, the function is nonnegative everywhere. In addition, we have proven that .
Now, let us consider (18) for two consecutive values of . The difference yields
If the difference assumes its minimum at the point , then, in a sufficiently small neighborhood of this point, we must have
If the minimum is reached at , we must have
while, if the minimum is reached at , we have
In this way, in order to ensure that everywhere, we must ensure that for all .
This condition is always satisfied when the constant is chosen in such a way that
for all .
Hence, if , a sufficient (not necessary) condition for ensuring that is the following
Therefore, since , we ensure that provided
Repeating this procedure we have, for sufficiently large , that .
7. The Solution as an Upper Bound for
From (1) and (18), we may write
Let us consider that assumes its minimum at the interior point . So, in a sufficiently small neighborhood of this point, we must have
or, in a more convenient form, assuming that (29) holds,
Since is nonnegative everywhere, and (and taking into account (29)—the definition of ), we conclude that
in the neighborhood of . Therefore, in this case, everywhere.
On the other hand, if the difference assumes its minimum at , we must have
while, if the minimum is reached at , we have
Repeating this procedure, we can conclude that the minimum of is nonnegative. Therefore,
In other words, the solution of the original problem represents an upper bound for the sequence . This fact ensures the convergence.
Since the solution is nonnegative and has a known upper bound, the constant may be chosen from the following formula (this is not a necessary choice)
provided the derivatives of and of are bounded.
It is remarkable that the convergence may be reached for lower values of the constant .
8. Solution Uniqueness
In order to demonstrate that the limit of the sequence is the unique solution of problem (1), let us assume that is different from (the limit).
Since (37) holds, we must have
and we only need to show that the maximum of is not positive.
For this, let us assume that assumes its maximum at the point . So, in a sufficiently small vicinity of this point, we must have
So, from the definition of the constant , we have, in the considered vicinity,
Now, suppose that assumes its maximum at the point . In this case, we have
On the other hand, if assumes its maximum at the point , we have
Consequently, it is demonstrated that the solution is unique and is represented by the limit of the sequence .
9. Variational Formulation
The solution of problem (18), denoted by , is the function that minimizes the (quadratic) functional below
The first variation of is given by [30]
or in a more convenient form by
in which is any admissible variation.
Considering that
we may write
The extremum of the functional is obtained making . Considering that is arbitrary, we obtain the Euler–Lagrange equation and the natural boundary conditions as follows
Problems (44) and (18) are the same problem, since is known.
Since the functional is strictly convex (see Appendix A), its extremum is unique and corresponds to a minimum [29,30]. Thus, each element may be obtained from the minimization of .
The existence of this minimum is ensured, since the functional is coercive [31].
10. A Numerical Approximation
The procedure proposed for constructing the solution of (1) may be used for obtaining numerical approximations too.
To illustrate this fact, let us consider the following (piecewise linear) approximation for the element , given by
in which represents the approximation for at the spatial point , and .
In this case, the functional becomes, for each , the following function
in which is given by (considering the piecewise approximation (50))
The values of that minimize the function defined in (46) are exactly the values of , obtained from the following system (linear),
11. Two Examples (With Known Exact Solutions)
Let us consider the following problem
whose exact solution is given by
Comparing (53) with (1) we have that
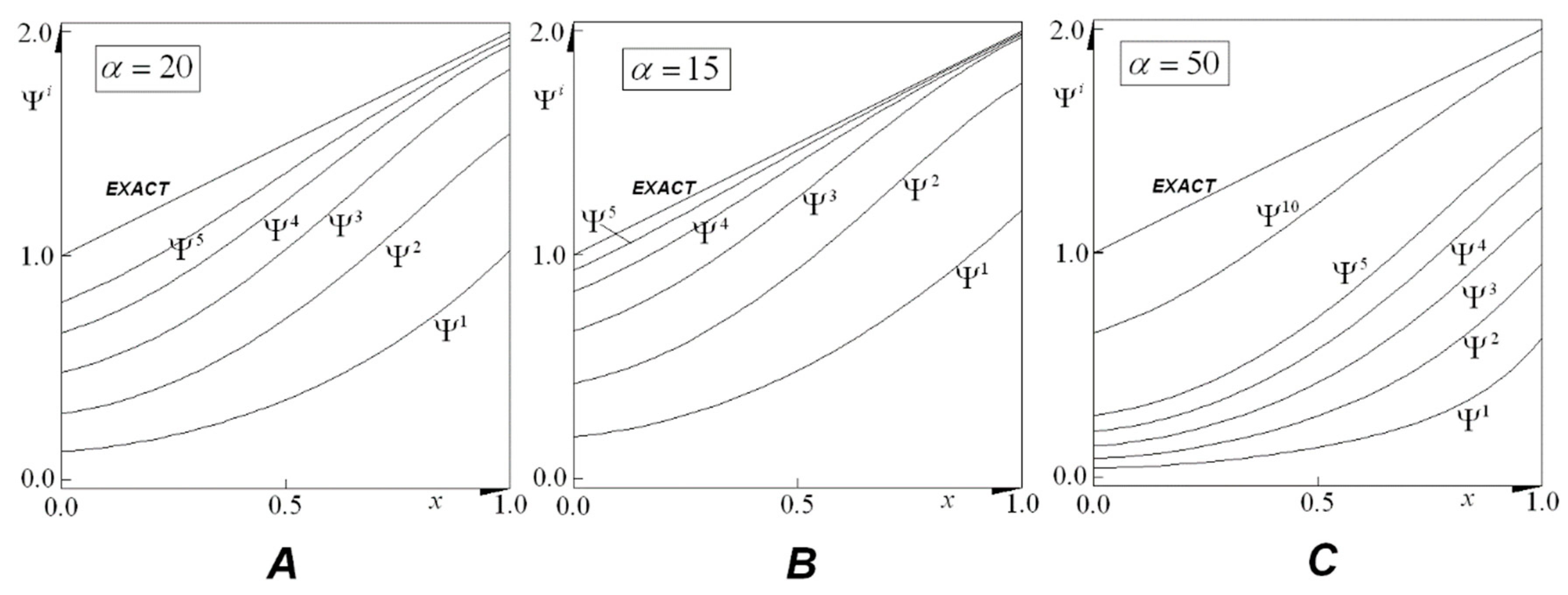
Some elements of the sequence , approximated by (50), are shown in Figure 1, as well as the exact solution.
It is to be noticed that the speed of convergence was strongly affected by the value of . As increased, the speed of convergence decreased. Nevertheless, cannot be very small, since this may give rise to nonincreasing sequences, and the convergence may not be achieved.
To illustrate the role of the constant in an explicit way, let us consider the following problem:
whose exact solution is given by
The elements of the sequence are obtained from
Let us assume that for each , is a constant for . This is equivalent to imposing , assuming . In this case, the functional becomes the function
So, the constant value for will be obtained from the minimization of the function . In other words, it will be the root of
The root of the above expression will be exactly the value of (assumed a constant for each ), given by
or considering the expression for , we have
Table 1 illustrates the convergence for several values of the constant . Notice that for and for , the convergence was not reached. For , we reached convergence, but the sequence was not a nondecreasing one. The speed of convergence, for , decreased as increased.
In other words, each column of Table 1 represents the elements: , ..., , obtained with nine different values of the constant .
12. Conclusions
The procedure proposed here differs from others due to its simplicity. Only basic tools are needed, which are available for undergraduate students. This is the main novelty and contribution of this work.
In addition, since the exact solution is represented by the limit of a sequence, there is no limit of accuracy when employing a numerical approximation.
The proposed procedure may be used for problems involving Dirichlet and some Neumann boundary conditions. This may be performed by employing very large or very small values for and . When (and/or ) is very large, we approximate a Dirichlet boundary condition. When (and/or ) is very small, we approximate a Neumann boundary condition (in this case representing an insulated edge).
When modeling a heat transfer problem involving high temperature levels, thermal radiant heat transfer plays a meaningful role, since the thermal interaction among far-positioned points becomes more significant as the temperature levels become larger. This fact gives rise to an integral operator, which represents the amount of thermal radiant energy arriving at each point of the body.
Besides the heat transfer phenomena, in which the thermal radiation plays a nonnegligible role, integro-differential equations are found in several other branches, such as optimal control problems [32]. Integro-differential equations involving fractional derivatives also consist of a potential issue to be explored due to their increasing interest and applicability [33,34,35,36,37,38,39].
The heat transfer process in a nonsymmetrical system of fins, as well as in multiphase bodies [40], gives rise to systems of second-order integro-differential equations. It seems logical that, with some adjustments, the procedure proposed here may be extended to such a class of problems.
Author Contributions
Methodology, R.M.S.d.G.; Software, R.P.S.d.G.; Formal analysis, R.M.S.d.G.; Investigation, R.M.S.d.G.; Writing–original draft, R.P.S.d.G. All authors have read and agreed to the published version of the manuscript.
Funding
The author: R. M. S. Gama, gratefully acknowledges the support provided by Brazilian Agency CNPq (Grant 306364/2018-1) and by the Brazilian Agency CAPES (Finance code 001).
Informed Consent Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A. On the Convexity of the Functional
A functional is said to be strictly convex, if and only if
So, the functional defined in (44) is said to be strictly convex, if and only if the following inequality holds
Since
it suffices to show that
To demonstrate the above inequality, it is enough to prove that
Since, for ,
we have that
Therefore, (A5) holds for any and , ensuring the functional convexity.
References
- Akyüz-Daşcioğlu, A.; Sezer, M. A Taylor polynomial approach for solving high-order linear Fredholm integro-differential equations in the most general form. Int. J. Comput. Math. 2007, 84, 527–539. [Google Scholar] [CrossRef]
- Maleknejad, K.; Mahmoudi, Y. Numerical solution of linear Fredholm integral equation by using hybrid Taylor and block-pulse functions. Appl. Math. Comput. 2004, 149, 799–806. [Google Scholar] [CrossRef]
- Maleknejad, K.; Shahrezaee, M.; Khatami, H. Numerical solution of integral equations system of the second kind by block-pulse functions. Appl. Math. Comput. 2005, 166, 15–24. [Google Scholar] [CrossRef]
- Danfu, H.; Xufeng, S. Numerical solution of integro-differential equations by using CAS wavelet operational matrix of integration. Appl. Math. Comput. 2007, 194, 60–466. [Google Scholar] [CrossRef]
- Lakestani, M.; Razzaghi, M.; Dehghan, M. Semiorthogonal spline wavelets approximation for Fredholm integro-differential equations. Math. Probl. Eng. 2006, 2006, 96184. [Google Scholar] [CrossRef] [Green Version]
- Behiry, S.H.; Hashish, H. Wavelet methods for the numerical solution of Fredholm integro-differential equations. Int. J. Appl. Math. 2002, 11, 27–35. [Google Scholar]
- Hosseini, S.M.; Shahmorad, S. Numerical piecewise approximate solution of Fredholm integro-differential equations by the Tau method. Appl. Math. Model. 2005, 29, 1005–1021. [Google Scholar] [CrossRef]
- Atabakan, Z.P.; Nasab, A.K.; Kılıçman, A.; Eshkuvatov, K.Z. Numerical solution of nonlinear Fredholm integro-differential equations using Spectral Homotopy Analysis method. Math. Probl. Eng. 2013, 2013, 674364. [Google Scholar]
- Atabakan, Z.P.; Kılıçman, A.; Nasab, A.K. On spectral homotopy analysis method for solving linear Volterra and Fredholm integro-differential equations. Abstr. Appl. Anal. 2012, 2012, 960289. [Google Scholar]
- Yalçinbaş, S.; Sezer, M.; Sorkun, H.H. Legendre polynomial solutions of high-order linear Fredholm integro-differential equations. Appl. Math. Comput. 2009, 210, 334–349. [Google Scholar] [CrossRef]
- Dehghan, M.; Saadatmandi, A. Chebyshev finite difference method for Fredholm integro-differential equation. Int. J. Comput. Math. 2008, 85, 123–130. [Google Scholar] [CrossRef]
- Rabbani, M.; Zarali, B. Solution of Fredholm Integro-differential Equations System by Modified Decomposition Method. J. Math. Comput. Sci. 2012, 5, 258–264. [Google Scholar] [CrossRef]
- Khani, S.; Shahmorad, S. An operational approach with Pade approximant for the numerical solution of non-linear Fredholm integro-differential equations. Sharif Univ. Technol. Sci. Iran. 2011, 19, 1691–1698. [Google Scholar] [CrossRef]
- Darania, P.; Ebadian, A. A method for the numerical solution of the integro-differential equations. Appl. Math. Comput. 2007, 188, 657–668. [Google Scholar] [CrossRef]
- Dehghan, M.; Salehi, R. The numerical solution of the non-linear integro-differential equations based on the meshless method. J. Comput. Appl. Math. 2012, 236, 2367–2377. [Google Scholar] [CrossRef] [Green Version]
- Kiwan, S. Thermal Analysis of Natural Convection Porous Fins. Transp. Porous Media 2007, 67, 17–29. [Google Scholar] [CrossRef]
- Kiwan, S. Effect of radiative losses on the heat transfer from porous fins. Int. J. Therm. Sci. 2007, 46, 1046–1055. [Google Scholar] [CrossRef]
- Asl, A.K.; Hossainpour, S.; Rashidi, M.M.; Sheremet, M.A.; Yang, Z. Comprehensive investigation of solid and porous fins influence on natural convection in an inclined rectangular enclosure. Int. J. Heat Mass Transf. 2019, 133, 729–744. [Google Scholar]
- Darvishi, M.T.; Gorla, R.S.R.; Khani, F. Natural convection and radiation in porous fins. Int. J. Numer. Methods Heat Fluid Flow 2013, 23, 1406–1420. [Google Scholar] [CrossRef]
- Gorla, R.S.R.; Bakier, A.Y. Thermal analysis of natural convection and radiation in porous fins. Int. Commun. Heat Mass Transf. 2011, 38, 638–645. [Google Scholar] [CrossRef]
- Bhanja, D.; Kundu, B.; Mandal, P.K. Thermal analysis of porous pin fin used for electronic cooling. International Conference on Design and Manufacturing. IConDM Procedia Eng. 2013, 64, 956–965. [Google Scholar] [CrossRef] [Green Version]
- Sparrow, E.M.; Cess, R.D. Radiation Heat Transfer; Hemisphere Publishing Corporation: Washington, DC, USA, 1978. [Google Scholar]
- Gama, R.M.S. An alternative mathematical modelling for coupled conduction/radiation energy transfer phenomenon in a system of gray bodies surrounded by a vacuum. Int. J. Non-Linear Mech. 1995, 30, 433–447. [Google Scholar] [CrossRef]
- Gama, R.M.S. Numerical simulation of the (nonlinear) conduction/radiation heat transfer process in a nonconvex and black cylindrical body. J. Comput. Phys. 1996, 128, 341–350. [Google Scholar] [CrossRef]
- Gama, R.M.S. Simulation of the steady-state energy transfer in rigid bodies, with convective/radiative boundary conditions employing a minimum principle. J. Comput. Phys. 1992, 99, 310–320. [Google Scholar] [CrossRef]
- Holman, J.P. Heat Transfer; McGraw-Hill: New York, NY, USA, 1996. [Google Scholar]
- Martins-Costa, M.L.; Vendas Sarmento, V.; Saldanha da Gama, R.P.; Saldanha da Gama, R.M. Solution construction for the nonlinear heat transfer problem in a cylindrical porous fin. J. Porous Media 2022, 25, 1–19. [Google Scholar] [CrossRef]
- Kreyszig, E. Introductory Functional Analysis with Applications; John Wiley & Sons: New York, NY, USA, 1978. [Google Scholar]
- Taylor, A.E. Introduction to Functional Analysis; Wiley: Toppan, Tokyo, 1958. [Google Scholar]
- Sagan, H. Introduction to the Calculus of Variations; Dover: New York, NY, USA, 1992. [Google Scholar]
- Berger, M.S. Nonlinearity & Functional Analysis: Lectures on Nonlinear Problems in Mathematical Analysis; Academic Press: London, UK, 1977. [Google Scholar]
- Akhmetov, M.U.; Zafer, A.; Sejilova, R.D. The control of boundary value problems for quasilinear impulsive integro-differential equations. Nonlinear Anal. Theory Methods Appl. 2002, 48, 271–286. [Google Scholar] [CrossRef]
- Tunç, C.; Tunç, O. A note on the stability and boundedness of solutions to non-linear differential systems of second order. J. Assoc. Arab. Univ. Basic Appl. Sci. 2017, 24, 169–175. [Google Scholar] [CrossRef]
- Abuasbeh, K.; Awadalla, M.; Jneid, M. Nonlinear Hadamard fractional boundary value problems with different orders. Rocky Mt. J. Math. 2021, 51, 17–29. [Google Scholar] [CrossRef]
- Achar, S.J.; Baishya, C.; Kaabar, M.K.A. Dynamics of the worm transmission in wireless sensor network in the framework of fractional derivatives. Math. Methods Appl. Sci. 2022, 45, 4278–4294. [Google Scholar] [CrossRef]
- Makhlouf, A.B.; Baleanu, D. Finite time stability of fractional order systems of neutral type. Fractal Fract. 2022, 6, 289. [Google Scholar] [CrossRef]
- Graef, J.R.; Tunç, C. Continuability and boundedness of multi-delay functional integro-differential equations of the second order. Rev. R Acad. Cienc. Exactas Fís. Nat. Ser. A Math. RACSAM 2015, 109, 169–173. [Google Scholar] [CrossRef]
- Ferrara, M.; Bianca, C.; Guerrini, L. Asymptotic limit of an integro-differential equation modelling complex systems. Izv. Math. 2014, 78, 1105. [Google Scholar]
- Ferrara, M.; Munteanu, F.; Udriste, C.; Zugravescu, D. Controllability of a nonholonomic macroeconomic system. J. Optim. Theory Appl. 2012, 154, 1036–1054. [Google Scholar]
- Martins-Costa, M.L.; Sampaio, R.; Gama, R.M.S. On the energy balance for continuous mixtures. Mech. Res. Commun. 1993, 20, 53–58. [Google Scholar] [CrossRef]
Figure 1.
Some elements of the sequence obtained with three different values of the constant (). In all cases, N = 50.
Figure 1.
Some elements of the sequence obtained with three different values of the constant (). In all cases, N = 50.


{kind=link}
Table 1.
The constant obtained for nine different values of .
| 100 | 50 | 20 | 10 | 5 | 2 | 0.5 | 0.1 | 0.01 | |
|---|---|---|---|---|---|---|---|---|---|
| i = 1 | 0.0294 | 0.0577 | 0.1364 | 0.2500 | 0.4286 | 0.7500 | 1.200 | 1.4286 | 1.4925 |
| i = 2 | 0.0581 | 0.1126 | 0.2572 | 0.4478 | 0.7017 | 0.9917 | 0.7853 | 0.1648 | −0.1058 |
| i = 3 | 0.0861 | 0.1649 | 0.3643 | 0.6028 | 0.8623 | 1.0010 | 1.1239 | 1.3970 | 1.5183 |
| i = 4 | 0.1134 | 0.2146 | 0.4588 | 0.7217 | 0.9434 | 0.9999 | 0.8808 | 0.2556 | −0.1995 |
| i = 5 | 0.1400 | 0.2620 | 0.5420 | 0.8101 | 0.9785 | 1.0000 | 1.0796 | 1.3789 | 1.5408 |
| i = 6 | 0.1660 | 0.3070 | 0.6149 | 0.8734 | 0.9921 | 1.0000 | 0.9283 | 0.3053 | −0.285 |
| i = 7 | 0.1913 | 0.3499 | 0.6781 | 0.9172 | 0.9972 | 1.0000 | 1.0515 | 1.3684 | 1.5604 |
| i = 8 | 0.2161 | 0.3906 | 0.7326 | 0.9466 | 0.9990 | 1.0000 | 0.9555 | 0.3332 | −0.3625 |
| i = 9 | 0.2402 | 0.4293 | 0.7792 | 0.9659 | 0.9996 | 1.0000 | 1.0333 | 1.3622 | 1.5766 |
| i = 10 | 0.2637 | 0.4660 | 0.8186 | 0.9784 | 0.9999 | 1.0000 | 0.9720 | 0.3494 | −0.4288 |
| i = 11 | 0.2866 | 0.5009 | 0.8517 | 0.9864 | 1.0000 | 1.0000 | 1.0215 | 1.3585 | 1.5887 |
| i = 12 | 0.3090 | 0.5339 | 0.8794 | 0.9915 | 1.0000 | 1.0000 | 0.9823 | 0.3589 | −0.4793 |
| i = 13 | 0.3307 | 0.5651 | 0.9022 | 0.9946 | 1.0000 | 1.0000 | 1.0138 | 1.3563 | 1.5963 |
| i = 14 | 0.3520 | 0.5947 | 0.9210 | 0.9966 | 1.0000 | 1.0000 | 0.9887 | 0.3646 | −0.5116 |
| i = 15 | 0.3727 | 0.6226 | 0.9363 | 0.9979 | 1.0000 | 1.0000 | 1.0089 | 1.3549 | 1.6002 |
| i = 16 | 0.3929 | 0.6489 | 0.9488 | 0.9987 | 1.0000 | 1.0000 | 0.9928 | 0.3681 | −0.5287 |
| i = 17 | 0.4125 | 0.6737 | 0.9590 | 0.9992 | 1.0000 | 1.0000 | 1.0057 | 1.3541 | 1.6020 |
| i = 18 | 0.4317 | 0.6970 | 0.9671 | 0.9995 | 1.0000 | 1.0000 | 0.9954 | 0.3702 | −0.5364 |
| i = 19 | 0.4504 | 0.7189 | 0.9737 | 0.9997 | 1.0000 | 1.0000 | 1.0036 | 1.3536 | 1.6027 |
| i = 20 | 0.4685 | 0.7395 | 0.9790 | 0.9998 | 1.0000 | 1.0000 | 0.9971 | 0.3715 | −0.5395 |
| i = 21 | 0.4862 | 0.7587 | 0.9832 | 0.9999 | 1.0000 | 1.0000 | 1.0023 | 1.3533 | 1.6030 |
| i = 22 | 0.5035 | 0.7768 | 0.9866 | 0.9999 | 1.0000 | 1.0000 | 0.9981 | 0.3723 | −0.5407 |
| i = 23 | 0.5202 | 0.7936 | 0.9893 | 1.0000 | 1.0000 | 1.0000 | 1.0015 | 1.3531 | 1.6031 |
| i = 24 | 0.5365 | 0.8093 | 0.9915 | 1.0000 | 1.0000 | 1.0000 | 0.9988 | 0.3727 | −0.5411 |
| i = 25 | 0.5524 | 0.8240 | 0.9932 | 1.0000 | 1.0000 | 1.0000 | 1.0010 | 1.3530 | 1.6031 |
| i = 26 | 0.5678 | 0.8376 | 0.9946 | 1.0000 | 1.0000 | 1.0000 | 0.9992 | 0.3730 | −0.5413 |
| i = 27 | 0.5828 | 0.8503 | 0.9957 | 1.0000 | 1.0000 | 1.0000 | 1.0006 | 1.3529 | 1.6031 |
| i = 28 | 0.5973 | 0.8621 | 0.9966 | 1.0000 | 1.0000 | 1.0000 | 0.9995 | 0.3732 | −0.5414 |
| i = 29 | 0.6115 | 0.8730 | 0.9973 | 1.0000 | 1.0000 | 1.0000 | 1.0004 | 1.3529 | 1.6031 |
| i = 30 | 0.6252 | 0.8832 | 0.9978 | 1.0000 | 1.0000 | 1.0000 | 0.9997 | 0.3733 | −0.5414 |
| i = 31 | 0.6386 | 0.8926 | 0.9983 | 1.0000 | 1.0000 | 1.0000 | 1.0003 | 1.3528 | 1.6031 |
| i = 32 | 0.6515 | 0.9012 | 0.9986 | 1.0000 | 1.0000 | 1.0000 | 0.9998 | 0.3734 | −0.5414 |
| i = 33 | 0.6641 | 0.9093 | 0.9989 | 1.0000 | 1.0000 | 1.0000 | 1.0002 | 1.3528 | 1.6031 |
| i = 34 | 0.6762 | 0.9167 | 0.9991 | 1.0000 | 1.0000 | 1.0000 | 0.9999 | 0.3734 | −0.5414 |
| i = 35 | 0.6881 | 0.9235 | 0.9993 | 1.0000 | 1.0000 | 1.0000 | 1.0001 | 1.3528 | 1.6031 |
| i = 36 | 0.6995 | 0.9298 | 0.9995 | 1.0000 | 1.0000 | 1.0000 | 0.9999 | 0.3734 | −0.5414 |
| i = 37 | 0.7106 | 0.9356 | 0.9996 | 1.0000 | 1.0000 | 1.0000 | 1.0001 | 1.3528 | 1.6031 |
| i = 38 | 0.7213 | 0.9409 | 0.9997 | 1.0000 | 1.0000 | 1.0000 | 0.9999 | 0.3735 | −0.5414 |
| i = 39 | 0.7318 | 0.9459 | 0.9997 | 1.0000 | 1.0000 | 1.0000 | 1.0000 | 1.3528 | 1.6031 |
| i = 40 | 0.7418 | 0.9504 | 0.9998 | 1.0000 | 1.0000 | 1.0000 | 1.0000 | 0.3735 | −0.5414 |
| i = 41 | 0.7516 | 0.9545 | 0.9998 | 1.0000 | 1.0000 | 1.0000 | 1.0000 | 1.3528 | 1.6031 |
| i = 42 | 0.7610 | 0.9584 | 0.9999 | 1.0000 | 1.0000 | 1.0000 | 1.0000 | 0.3735 | −0.5414 |
| i = 43 | 0.7701 | 0.9619 | 0.9999 | 1.0000 | 1.0000 | 1.0000 | 1.0000 | 1.3528 | 1.6031 |
| i = 44 | 0.7789 | 0.9651 | 0.9999 | 1.0000 | 1.0000 | 1.0000 | 1.0000 | 0.3735 | −0.5414 |
| i = 45 | 0.7874 | 0.9680 | 0.9999 | 1.0000 | 1.0000 | 1.0000 | 1.0000 | 1.3528 | 1.6031 |
| i = 46 | 0.7957 | 0.9707 | 0.9999 | 1.0000 | 1.0000 | 1.0000 | 1.0000 | 0.3735 | −0.5414 |
| i = 47 | 0.8036 | 0.9732 | 1.0000 | 1.0000 | 1.0000 | 1.0000 | 1.0000 | 1.3528 | 1.6031 |
| i = 48 | 0.8113 | 0.9755 | 1.0000 | 1.0000 | 1.0000 | 1.0000 | 1.0000 | 0.3735 | −0.5414 |
| i = 49 | 0.8187 | 0.9776 | 1.0000 | 1.0000 | 1.0000 | 1.0000 | 1.0000 | 1.3528 | 1.6031 |
| i = 50 | 0.8258 | 0.9795 | 1.0000 | 1.0000 | 1.0000 | 1.0000 | 1.0000 | 0.3735 | −0.5414 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Saldanha da Gama, R.M.; Saldanha da Gama, R.P. A Procedure for Constructing the Solution of a Nonlinear Fredholm Integro-Differential Equation of Second Order. Axioms 2022, 11, 672. https://doi.org/10.3390/axioms11120672
AMA Style
Saldanha da Gama RM, Saldanha da Gama RP. A Procedure for Constructing the Solution of a Nonlinear Fredholm Integro-Differential Equation of Second Order. Axioms. 2022; 11(12):672. https://doi.org/10.3390/axioms11120672
Chicago/Turabian StyleSaldanha da Gama, Rogério Martins, and Rogério Pazetto Saldanha da Gama. 2022. "A Procedure for Constructing the Solution of a Nonlinear Fredholm Integro-Differential Equation of Second Order" Axioms 11, no. 12: 672. https://doi.org/10.3390/axioms11120672
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.