Comparative Study of Different Approaches for Islanding Detection of Distributed Generation Systems

 , ,
, ,
Abstract
:1. Introduction
2. Literature Review
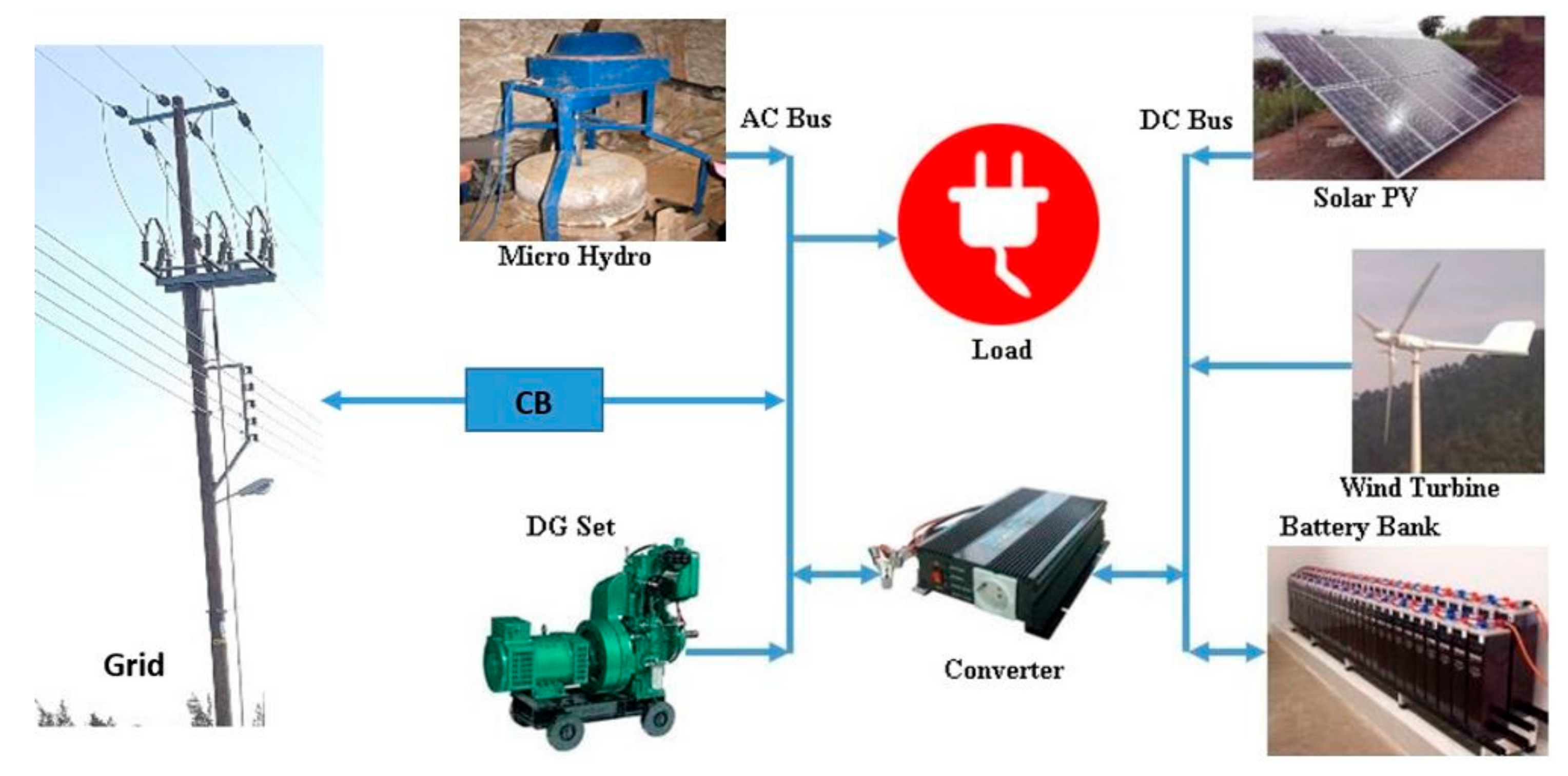
2.1. Distributed Generation
2.2. Islanding Detection Methods
2.2.1. Passive Method
2.2.2. Active Method
2.2.3. Hybrid Method
2.2.4. Machine Learning Method
- C4.5 Decision Tree-Based Islanding Detection [64]:
2.2.5. Remote Methods
3. Method
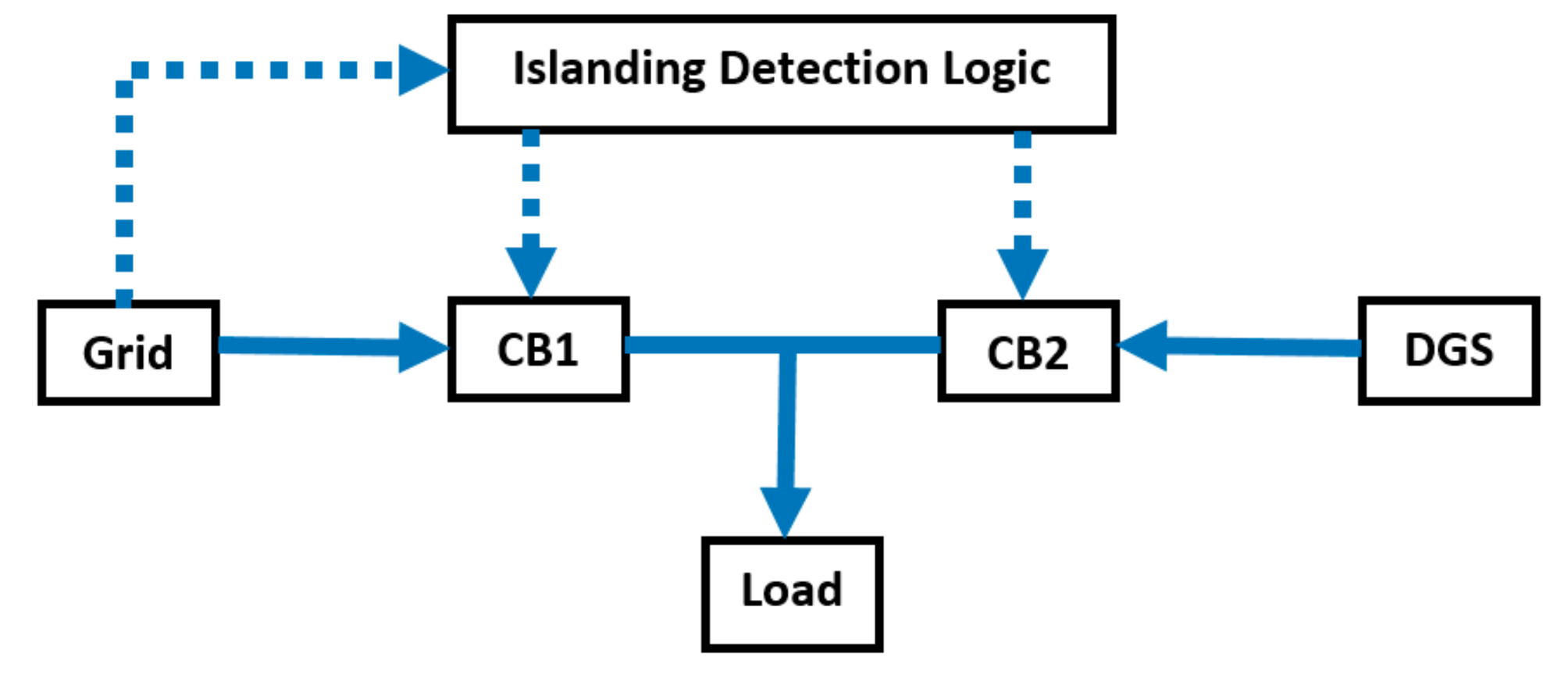
3.1. Auto-Grounding Method
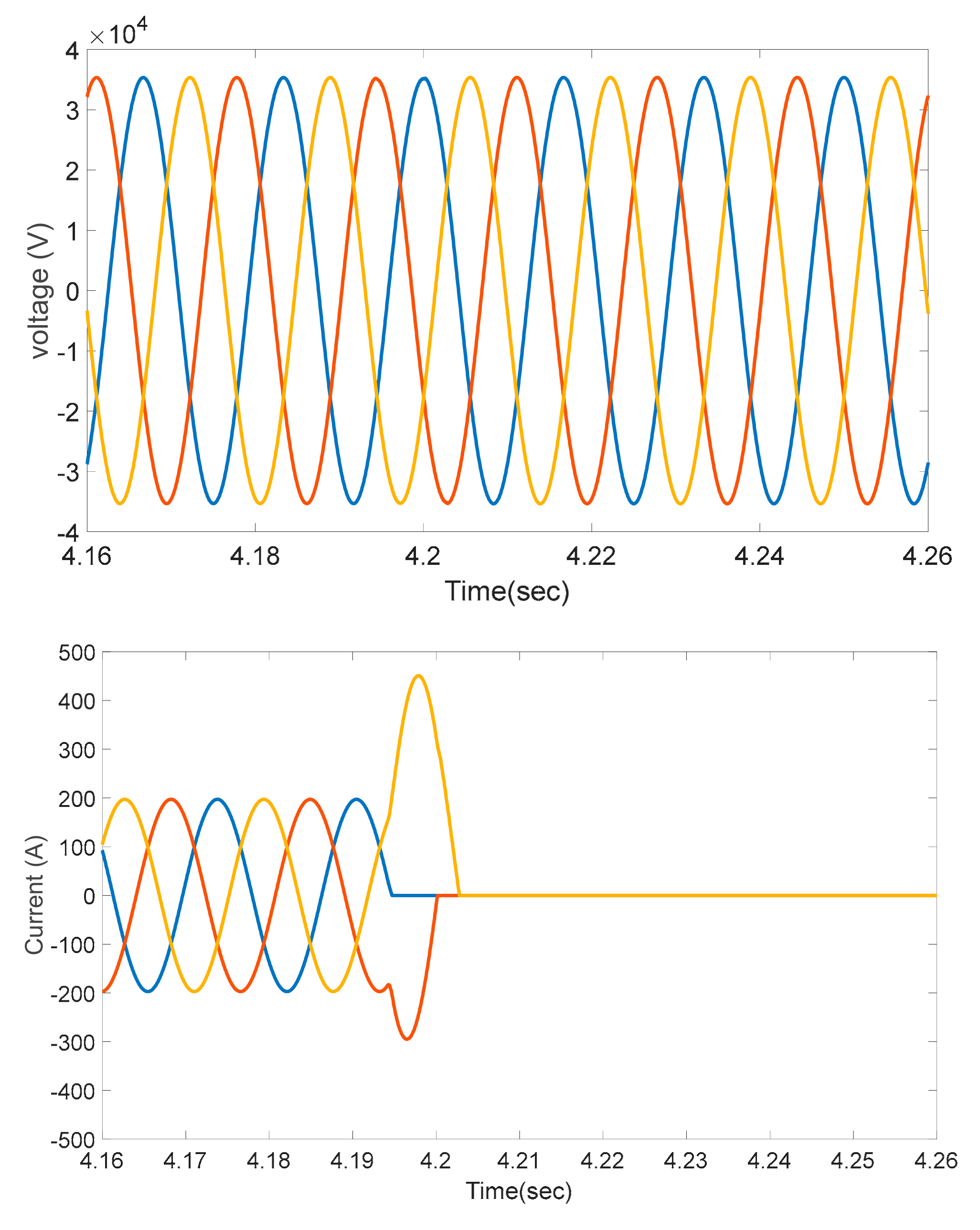
- Both of the circuit breakers (CB1 and CB2) are in closed conditions. That is the normal condition. Thus, the voltage and current waveforms found at the utilization level are purely sinusoidal.
- CB1 is initially closed and is opened with transition time ‘t’, but CB2 is closed. After switching off the CB1, the whole part of the distribution system is isolated from the remaining part of the power system, which is called the islanding condition.
- CB1 is initially closed and is opened with transition time ‘t’. As another DG is there in the line where CB2 is connected, the opening of CB2 is the condition of anti-islanding.
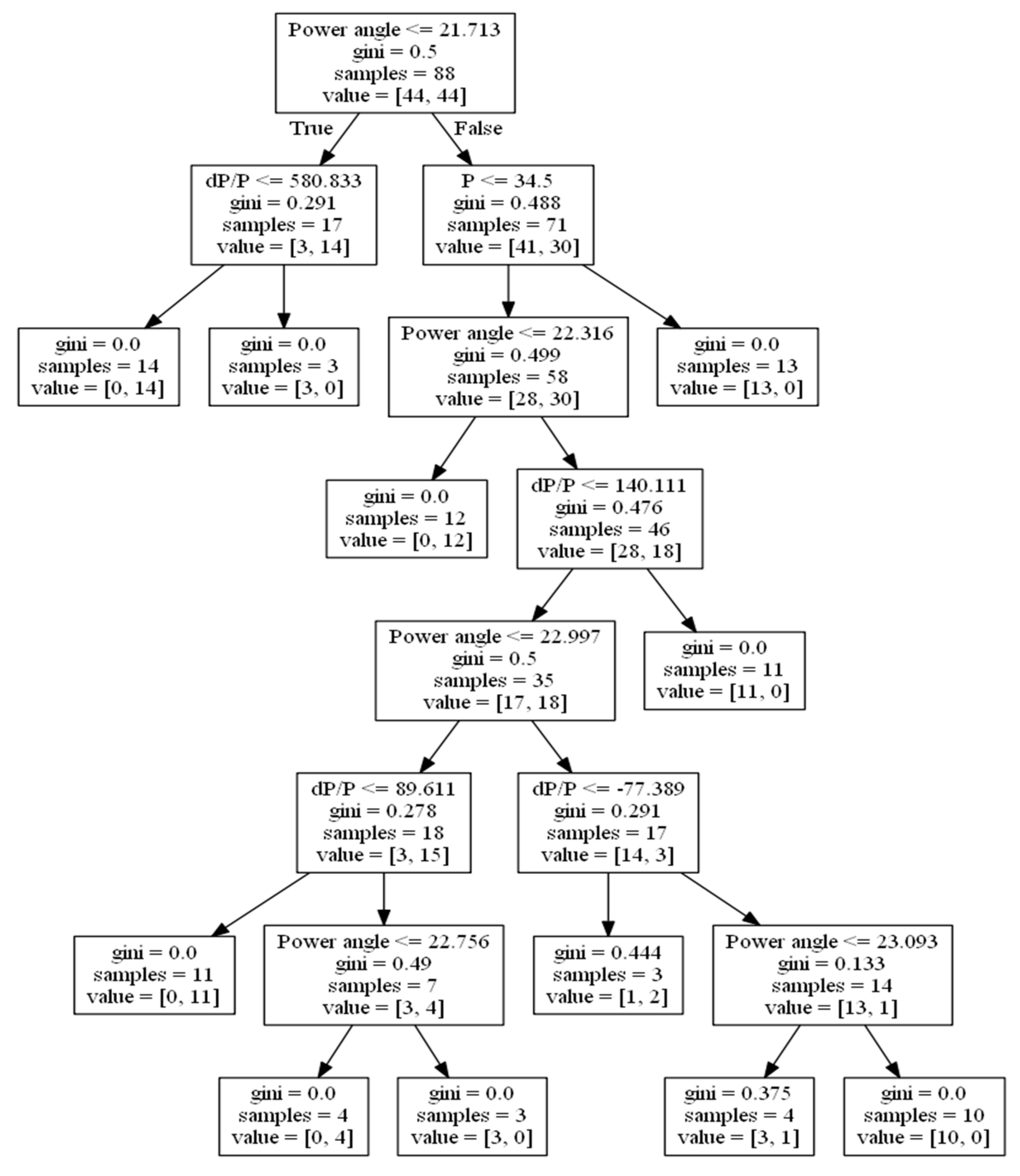
3.2. Data Mining-Decision Tree Algorithm
4. Result and Discussion
4.1. Result of Islanding Detection by the Auto-Grounding Method
4.2. Result of Islanding Detection by the Data Mining-Decision Tree Algorithm
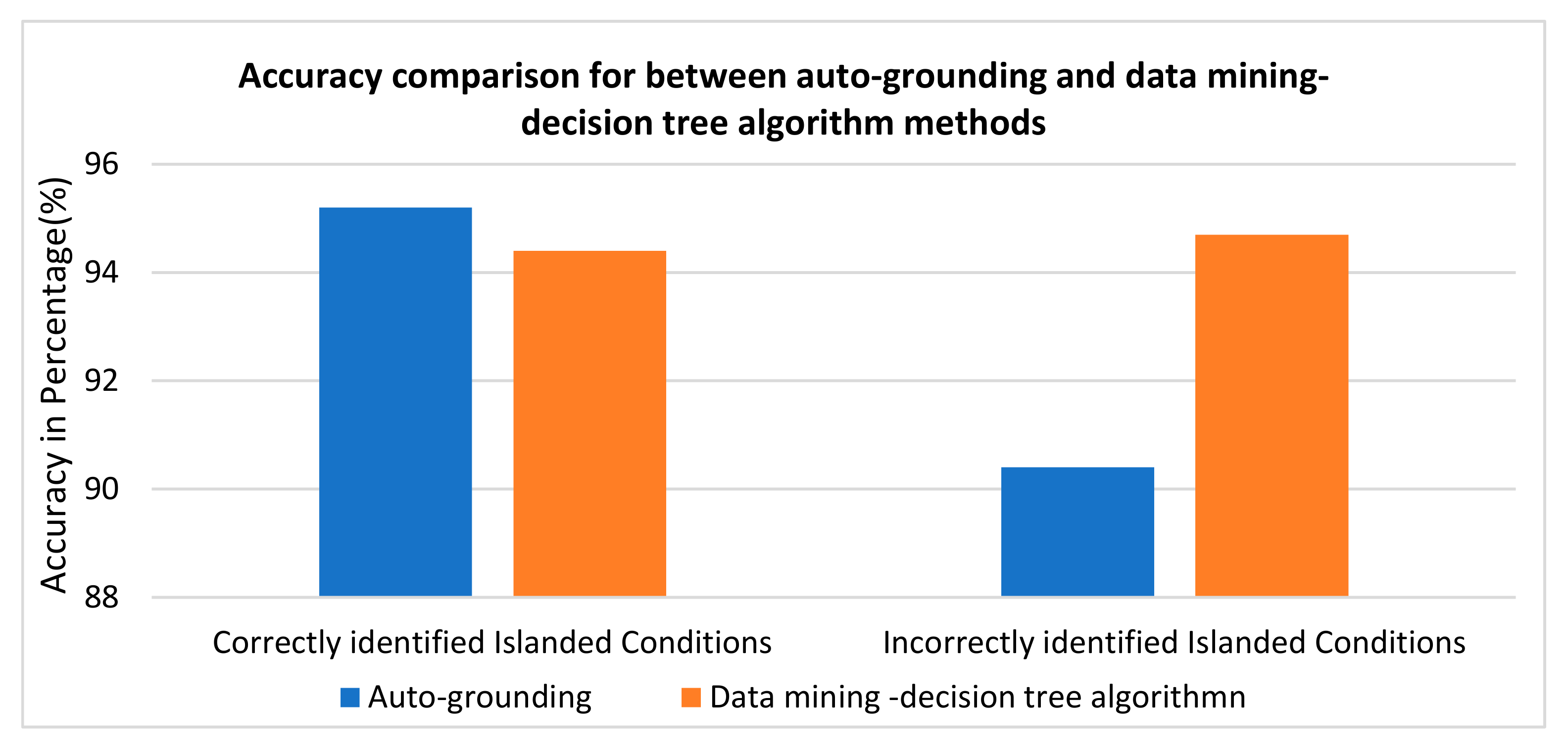
4.3. Comparison between Auto-Grounding Method and the Data Mining-Decision Tree Algorithm Method
5. Conclusions
- The data mining-decision tree method has a higher overall accuracy (94.5%) when compared to the auto-grounding method (92.8%). Thus, comparing between the two, the data mining-decision tree method is the more reliable method of islanding detection.
- In comparison between the two discussed methods, the data mining-decision tree method presents the fastest and more accurate operation of anti-islanding condition.
- The detections of islanding conditions were done in 1.705 s and 0.162 s by auto-grounding and data mining-decision tree methods. The speed of islanding condition detections can be improved upon by simulating these two methods in a computer with better specifications.
- A larger amount of training data can be fed to a data mining-decision tree method to further increase the accuracy of this method.
- Expanding on the presented method by making it compatible with the grid code. This may include and not be limited to introducing fault ride through requirements.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Khamis, A.; Shareef, H.; Bizkevelci, E.; Khatib, T. A review of islanding detection techniques for renewable distributed generation systems. Renew. Sustain. Energy Rev. 2013, 28, 483–493. [Google Scholar] [CrossRef]
- Laghari, J.; Mokhlis, H.; Karimi, M.; Bakar, A.; Mohamad, H. An islanding detection strategy for distribution network connected with hybrid dg resources. Renew. Sustain. Energy Rev. 2015, 45, 662–676. [Google Scholar] [CrossRef]
- Mahat, P.; Chen, Z.; Bak-Jensen, B. Review of islanding detection methods for distributed generation. In Proceedings of the Third International Conference on Deregulation and Restructuring and Power Technologies (DRPT 2008), Nanjing, China, 6–9 April 2008; pp. 2743–2748. [Google Scholar]
- Greacen, C.; Engel, R.; Quetchenbach, T. A Guidebook on Grid Interconnection and Islanded Operation of Mini-Grid Power Systems up to 200 kw; Lawrence Berkeley National Lab.(LBNL): Berkeley, CA, USA, 2013. [Google Scholar]
- Hirsch, A.; Parag, Y.; Guerrero, J. Microgrids: A review of technologies, key drivers, and outstanding issues. Renew. Sustain. Energy Rev. 2018, 90, 402–411. [Google Scholar] [CrossRef]
- Xue, F.; Xu, Y.; Zhu, H.; Lu, S.; Huang, T.; Zhang, J. Structural evaluation for distribution networks with distributed generation based on complex network. Complexity 2017, 2017, 7539089. [Google Scholar] [CrossRef]
- Yingram, M.; Premrudeepreechacharn, S. Over/undervoltage and undervoltage shift of hybrid islanding detection method of distributed generation. Sci. World J. 2015, 2015, 654942. [Google Scholar] [CrossRef] [PubMed]
- Dong, Y.; Bing, C.; Qun, L.; Jianhua, L. Control strategy of low voltage microgrid based on equivalent reference current control. In Proceedings of the 2014 China International Conference on Electricity Distribution (CICED), Shenzhen, China, 23–26 September 2014; pp. 70–76. [Google Scholar]
- Sorrell, S. Reducing energy demand: A review of issues, challenges and approaches. Renew. Sustain. Energy Rev. 2015, 47, 74–82. [Google Scholar] [CrossRef] [Green Version]
- Eltawil, M.A.; Zhao, Z. Grid-connected photovoltaic power systems: Technical and potential problems—a review. Renew. Sustain. Energy Rev. 2010, 14, 112–129. [Google Scholar] [CrossRef]
- Bukhari, S.B.A.; Zaman, M.S.U.; Haider, R.; Oh, Y.-S.; Kim, C.-H. A protection scheme for microgrid with multiple distributed generations using superimposed reactive energy. Int. J. Electr. Power Energy Syst. 2017, 92, 156–166. [Google Scholar] [CrossRef]
- Chen, X.; Li, Y.; Crossley, P. A novel hybrid islanding detection method for grid-connected microgrids with multiple inverter-based distributed generators based on adaptive reactive power disturbance and passive criteria. IEEE Trans. Power Electron. 2018, 34, 9342–9356. [Google Scholar] [CrossRef]
- Pedrino, E.C.; Yamada, T.; Lunardi, T.R.; de Melo Vieira, J.C., Jr. Islanding detection of distributed generation by using multi-gene genetic programming based classifier. Appl. Soft Comput. 2019, 74, 206–215. [Google Scholar] [CrossRef]
- Photovoltaics, D.; Storage, E. IEEE standard for interconnection and interoperability of distributed energy resources with associated electric power systems interfaces. IEEE Std. 2018, 1547–2018. [Google Scholar] [CrossRef]
- Kim, M.-S.; Haider, R.; Cho, G.-J.; Kim, C.-H.; Won, C.-Y.; Chai, J.-S. Comprehensive review of islanding detection methods for distributed generation systems. Energies 2019, 12, 837. [Google Scholar] [CrossRef]
- Bignucolo, F.; Cerretti, A.; Coppo, M.; Savio, A.; Turri, R. Impact of distributed generation grid code requirements on islanding detection in LV networks. Energies 2017, 10, 156. [Google Scholar] [CrossRef]
- Khamis, A.; Xu, Y.; Dong, Z.Y.; Zhang, R. Faster detection of microgrid islanding events using an adaptive ensemble classifier. IEEE Trans. Smart Grid 2016, 9, 1889–1899. [Google Scholar] [CrossRef]
- Bukhari, S.B.A.; Haider, R.; Zaman, M.S.U.; Oh, Y.-S.; Cho, G.-J.; Kim, C.-H. An interval type-2 fuzzy logic based strategy for microgrid protection. Int. J. Electr. Power Energy Syst. 2018, 98, 209–218. [Google Scholar] [CrossRef]
- Pouryekta, A.; Ramachandaramurthy, V.; Padmanaban, S.; Blaabjerg, F.; Guerrero, J. Boundary detection and enhancement strategy for power system bus bar stabilization—investigation under fault conditions for islanding operation. Energies 2018, 11, 889. [Google Scholar] [CrossRef]
- Mahat, P.; Chen, Z.; Bak-Jensen, B. A hybrid islanding detection technique using average rate of voltage change and real power shift. IEEE Trans. Power Deliv. 2009, 24, 764–771. [Google Scholar] [CrossRef]
- Zeineldin, H.H.; Kirtley, J.L. A simple technique for islanding detection with negligible nondetection zone. IEEE Trans. Power Deliv. 2009, 24, 779–786. [Google Scholar] [CrossRef]
- Do, H.T.; Zhang, X.; Nguyen, N.V.; Li, S.S.; Chu, T.T.-T. Passive-islanding detection method using the wavelet packet transform in grid-connected photovoltaic systems. IEEE Trans. Power Electron. 2015, 31, 6955–6967. [Google Scholar] [CrossRef]
- Reigosa, D.; Briz, F.; Charro, C.B.; García, P.; Guerrero, J.M. Active islanding detection using high-frequency signal injection. IEEE Trans. Ind. Appl. 2012, 48, 1588–1597. [Google Scholar] [CrossRef]
- Far, H.G.; Rodolakis, A.J.; Joos, G. Synchronous distributed generation islanding protection using intelligent relays. IEEE Trans. Smart Grid 2012, 3, 1695–1703. [Google Scholar] [CrossRef]
- Tran, T.; Nguyen, D.; Fujita, G. Islanding detection method based on injecting perturbation signal and rate of change of output power in dc grid-connected photovoltaic system. Energies 2018, 11, 1313. [Google Scholar] [CrossRef]
- Bei, T.-Z. Accurate active islanding detection method for grid-tied inverters in distributed generation. IET Renew. Power Gener. 2017, 11, 1633–1639. [Google Scholar] [CrossRef]
- Khodaparastan, M.; Vahedi, H.; Khazaeli, F.; Oraee, H. A novel hybrid islanding detection method for inverter-based DGs using SFS and ROCOF. IEEE Trans. Power Deliv. 2015, 32, 2162–2170. [Google Scholar] [CrossRef]
- Akhlaghi, S.; Meshginkelk, H.; Akhlaghi, A.; Ghadimi, A. A novel hybrid islanding detection method for inverter-based distributed generation based on frequency drift. Aust. J. Electr. Electron. Eng. 2014, 11, 161–174. [Google Scholar] [CrossRef]
- Pouryekta, A.; Ramachandaramurthy, V.K.; Mithulananthan, N.; Arulampalam, A. Islanding detection and enhancement of microgrid performance. IEEE Syst. J. 2017, 12, 3131–3141. [Google Scholar] [CrossRef]
- International Energy Agency; Photovoltaic Power Systems. Evaluation of Islanding Detection Methods for Photovoltaic Utilityinteractive Power Systems; Report IEA PVPS T5-09; International Energy Agency: Paris, France, 2002. [Google Scholar]
- IEC 62116:2014 Utility-Interconnected Photovoltaic Inverters-Test Procedure of Islanding Prevention Measures; International Electrotechnical Commission: Geneva, Switzerland, 2014.
- Ghanbari, T.; Farjah, E.; Naseri, F. Power quality improvement of radial feeders using an efficient method. Electr. Power Syst. Res. 2018, 163, 140–153. [Google Scholar] [CrossRef]
- Jenkins, N. Distributed Generation; The Institution of Engineering and Technology: Stevenage, UK, 2010. [Google Scholar]
- Pepermans, G.; Driesen, J.; Haeseldonckx, D.; Belmans, R.; D’haeseleer, W. Distributed generation: Definition, benefits and issues. Energy Policy 2005, 33, 787–798. [Google Scholar] [CrossRef]
- Shrestha, A. Planning, Design In addition, Optimization Of Distribution System For Affected Area Of Upper Karnali Hydropower Project. Master’s Thesis, Kathmandu University, Kathmandu, Nepal, 2017. [Google Scholar]
- Mohajeryami, S.; Jennings, R.; Alkhbbaz, G. Integration of energy storage and distributed generation (dg) in distribution systems: Economic analysis and development perspective. Munich Personal RePEc Archive 2015. [Google Scholar]
- Hasan, N.S.; Hassan, M.Y.; Majid, M.S.; Rahman, H.A. Review of storage schemes for wind energy systems. Renew. Sustain. Energy Rev. 2013, 21, 237–247. [Google Scholar] [CrossRef]
- Lopes, J.P.; Hatziargyriou, N.; Mutale, J.; Djapic, P.; Jenkins, N. Integrating distributed generation into electric power systems: A review of drivers, challenges and opportunities. Electr. Power Syst. Res. 2007, 77, 1189–1203. [Google Scholar] [CrossRef] [Green Version]
- Qiu, J.; Xu, Z.; Zheng, Y.; Wang, D.; Dong, Z.Y. Distributed generation and energy storage system planning for a distribution system operator. IET Renew. Power Gener. 2018, 12, 1345–1353. [Google Scholar] [CrossRef]
- Zhang, X.; Chen, H.; Xu, Y.; Li, W.; He, F.; Guo, H.; Huang, Y. Distributed generation with energy storage systems: A case study. Appl. Energy 2017, 204, 1251–1263. [Google Scholar] [CrossRef]
- Shrestha, P.; Shrestha, A.; Adhikary, B. Comparative Analysis of Grid Integration on Distributed Energy System. In Proceedings of the 5th International Conference on Developments in Renewable Energy Technology, Kathmandu, Nepal, 29–31 March 2018. [Google Scholar]
- Bhandari, B.; Ahn, S.-H.; Ahn, T.-B. Optimization of hybrid renewable energy power system for remote installations: Case studies for mountain and island. Int. J. Precis. Eng. Manuf. 2016, 17, 815–822. [Google Scholar] [CrossRef]
- Sah, S.; Shrestha, A.; Papadakis, A. Cost-Effective and Reliable Energy System for Kathmandu University Complex. In Proceedings of the 11th International Conference on Deregulated Engineering Market Issues, Nicosia, Cyprus, 20–21 September 2018. [Google Scholar]
- Shrestha, A.; Singh, A.; Khanal, K.; Maskey, R. Potentiality of off-grid hybrid systems for sustainable power supply at Kathmandu University campus. In Proceedings of the 2016 IEEE 6th International Conference on Power Systems (ICPS), New Delhi, India, 4–6 March 2016; pp. 1–6. [Google Scholar]
- Bhandari, V.; Dahal, R.; Adhikary, B.; Maskey, R.K.; Shrestha, N. MiniGrid: Design and development of mini-grid for efficient use of distributed hydropower systems-experience from the first year of the project. Rentech Symp. Comendium 2012, 1, 4. [Google Scholar]
- Bhandari, B.; Lee, K.-T.; Lee, G.-Y.; Cho, Y.-M.; Ahn, S.-H. Optimization of hybrid renewable energy power systems: A review. Int. J. Precis. Eng. Manuf. Green Technol. 2015, 2, 99–112. [Google Scholar] [CrossRef]
- Shrestha, A.; Rana, L.B.; Singh, A.; Phuyal, S.; Ghimire, A.; Giri, R.; Kattel, R.; Karki, K.; Jha, S.K. Assessment of electricity excess in an isolated hybrid energy system: A case study of a dangiwada village in rural nepal. Energy Procedia 2019, 160, 76–83. [Google Scholar] [CrossRef]
- Bhattacharyya, S.C.; Palit, D. Mini-Grids for Rural Electrification of Developing Countries: Analysis and Case Studies from South Asia; Springer: Berlin, Germany, 2014. [Google Scholar]
- Kunte, R.S.; Gao, W. Comparison and review of islanding detection techniques for distributed energy resources. In Proceedings of the 40th North American Power Symposium, Calgary, AB, Canada, 28–30 September 2008; pp. 1–8. [Google Scholar]
- Merino Fernández, J.; Mendoza-Araya, P.; Venkataramanan, G.; Baysal, M. Islanding detection in microgrids using harmonic signature. IEEE Trans. Power Deliv. 2015, 30, 2102–2109. [Google Scholar] [CrossRef]
- Najy, W.K.; Zeineldin, H.; Alaboudy, A.H.K.; Woon, W.L. A bayesian passive islanding detection method for inverter-based distributed generation using esprit. IEEE Trans. Power Deliv. 2011, 26, 2687–2696. [Google Scholar] [CrossRef]
- Wang, F.; Xu, Z. Evaluation of inverter resident passive islanding detection method for grid connected PV system under constant power mode. In Proceedings of the Chinese Control and Decision Conference, Guilin, China, 17–19 June 2009; pp. 3086–3089. [Google Scholar]
- Velasco, D.; Trujillo, C.; Garcerá, G.; Figueres, E. Review of anti-islanding techniques in distributed generators. Renew. Sustain. Energy Rev. 2010, 14, 1608–1614. [Google Scholar] [CrossRef]
- Chang, W.-Y.; Yang, H.-T. An integrated passive islanding detection method for distributed generators. WSEAS Trans. Syst. 2009, 8, 1207–1216. [Google Scholar]
- Merlin, V.L.; Santos, R.C.; Grilo, A.P.; Vieira, J.C.M.; Coury, D.V.; Oleskovicz, M. A new artificial network based method for islanding detection of distributed generators. Int. J. Electr. Power Energy Syst. 2016, 75, 139–151. [Google Scholar] [CrossRef]
- Hatata, A.; Abd-Raboh, E.-H.; Bishoy, E.S. A review of anti-islanding protection methods for renewable distributed generation systems. J. Electr. Eng. 2016, 16. [Google Scholar]
- Skocil, T.; Gomis-Bellmunt, O.; Montesinos-Miracle, D.; Galceran-Arellano, S.; Rull-Duran, J. Passive and active methods of islanding for PV systems. In Proceedings of the 13th European Conference on Power Electronics and Applications, Barcelona, Spain, 8–10 September 2009; pp. 1–10. [Google Scholar]
- Abokhalil, A.G.; Awan, A.B.; Al-Qawasmi, A.R. Comparative study of passive and active islanding detection methods for PV grid-connected systems. Sustainability 2018, 10, 1798. [Google Scholar] [CrossRef]
- Abd-Elkader, A.G.; Saleh, S.M.; Eiteba, M.M. A passive islanding detection strategy for multi-distributed generations. Int. J. Electr. Power Energy Syst. 2018, 99, 146–155. [Google Scholar] [CrossRef]
- Bower, W.; Ropp, M. Evaluation of islanding detection methods for utility-interactive inverters in photovoltaic systems. Sandia Rep. SAND 2002, 3591, 2002. [Google Scholar]
- Khamis, A.; Shareef, H.; Mohamed, A.; Bizkevelci, E. Islanding detection in a distributed generation integrated power system using phase space technique and probabilistic neural network. Neurocomputing 2015, 148, 587–599. [Google Scholar] [CrossRef]
- Mohiti, M.; Mahmoodzadeh, Z.; Vakilian, M. A hybrid micro grid islanding detection method. In Proceedings of the 13th International Conference on Environment and Electrical Engineering (EEEIC), Wroclaw, Poland, 1–3 November 2013; pp. 342–347. [Google Scholar]
- Yin, J.; Chang, L.; Diduch, C. A new hybrid anti-islanding algorithm in grid connected three-phase inverter system. In Proceedings of the 37th IEEE in Power Electronics Specialists Conference, Jeju, Korea, 18–22 June 2006; pp. 1–7. [Google Scholar]
- Mostafaei, S.; Beheshti, S.; Wu, B.; Zhang, D.; Wang, H.; Xing, H. A novel hybrid active anti-islanding method for multi-converter fed distributed generation systems. In Proceedings of the 2013 IEEE International Conference on in Industrial Technology (ICIT), Cape Town, South Africa, 25–28 February 2013; pp. 654–660. [Google Scholar]
- Matic Cuka, B. Machine Learning Approach to Islanding Detection for Inverter-based Distributed 596 Generation. Ph.D. Thesis, Texas A & M University, College Station, TX, USA, 2014. [Google Scholar]
- Lin, X.; Dong, X.; Lu, Y.; Wei, Z.; Liu, Y. Application of intelligent algorithm in island detection of distributed generation. Aust. J. Electr. Electron. Eng. 2010, 7, 203–210. [Google Scholar] [CrossRef]
- Kong, X.; Xu, X.; Yan, Z.; Chen, S.; Yang, H.; Han, D. Deep learning hybrid method for islanding detection in distributed generation. Appl. Energy 2018, 210, 776–785. [Google Scholar] [CrossRef]
- Alam, M.R.; Muttaqi, K.M.; Bouzerdoum, A. Evaluating the effectiveness of a machine learning approach based on response time and reliability for islanding detection of distributed generation. IET Renew. Power Gener. 2017, 11, 1392–1400. [Google Scholar] [CrossRef] [Green Version]
- Cui, Q.; El-Arroudi, K.; Joós, G. Islanding detection of hybrid distributed generation under reduced non-detection zone. IEEE Trans. Smart Grid 2017, 9, 5027–5037. [Google Scholar] [CrossRef]
- STATISTICA Features Overview. Available online: http://www.statsoft.com/Products/STATISTICA-Features (accessed on 23 July 2019).
- Pujhari, T. Islanding Detection in Distributed Generation. Master’s Thesis, National Institute of Technology, Rourkela, India, 2009. [Google Scholar]
- Bayrak, G. A remote islanding detection and control strategy for photovoltaic-based distributed generation systems. Energy Convers. Manag. 2015, 96, 228–241. [Google Scholar] [CrossRef]
- Bayrak, G.; Kabalci, E. Implementation of a new remote islanding detection method for wind–solar hybrid power plants. Renew. Sustain. Energy Rev. 2016, 58, 1–15. [Google Scholar] [CrossRef]
- Lee, K.-J.; Kim, K.-M.; Moon, C.; Ahn, H.-S.; Jeong, G.-M. A new type of remote power monitoring system basedon a wireless sensor network used in an anti-islanding method applied to a smart-grid. In Proceedings of the International Conference on Multimedia, Computer Graphics, and Broadcasting, Jeju Island, Korea, 8–10 December 2011; pp. 358–367. [Google Scholar]
- Sun, R.; Wu, Z.; Centeno, V.A. Power system islanding detection & identification using topology approach and decision tree. In Proceedings of the 2011 IEEE in Power and Energy Society General Meeting, Detroit, MI, USA, 24–28 July 2011; pp. 1–6. [Google Scholar]
- Abbey, C.; Brissette, Y.; Venne, P. An autoground system for anti-islanding protection of distributed generation. IEEE Trans. Power Syst. 2013, 29, 873–880. [Google Scholar] [CrossRef]
- Breiman, L.; Friedman, J.; Olshen, R.A.; Stone, C.J. Classification and Decision Trees; Wadsworth International Group: Belmont, CA, USA, 1984. [Google Scholar]
- Wehenkel, L.; Van Cutsem, T.; Ribbens-Pavella, M. An artificial intelligence framework for online transient stability assessment of power systems. IEEE Trans. Power Syst. 1989, 4, 789–800. [Google Scholar] [CrossRef]
- Wehenkel, L.; Pavella, M. Decision trees and transient stability of electric power systems. Automatica 1991, 27, 115–134. [Google Scholar] [CrossRef] [Green Version]
- Loh, W.Y. Classification and regression trees. Wiley Interdiscip. Rev. Data Min. Knowl. Discov. 2011, 1, 14–23. [Google Scholar] [CrossRef]
- Breiman, L. Classification and Regression Trees; Routledge: Abingdon, UK, 2017. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technique | NDZ | Detection Time | Power Quality | Cost | Detection Reliability | Effect of Multiple DGs |
|---|---|---|---|---|---|---|
| Passive | Broad | Short | No effect | Low | Low | None |
| Active | Limited | Long | Degradation | Average | High | Synchronization issues |
| Hybrid | Limited | Long | Degradation | High | High | Synchronization issues |
| Machine Learning | Limited | Variable | No effect | High | High | None |
| Remote | None | Very short | No effect | High | Very high | None |
| No. | Frequency | Voltage | df/dt | dP/dt | Islanding States |
|---|---|---|---|---|---|
| (Hz) | (pu) | (Hz/sec) | (MW/sec) | ||
| 1 | 49.977 | 0.911 | 0.748 | 44.039 | 1 |
| 2 | 50.279 | 0.989 | 7.309 | 508.538 | 1 |
| 3 | 49.986 | 0.935 | 0 | 1.981 | 0 |
| 4 | 49.979 | 1.05 | 0.175 | 16.706 | 1 |
| 5 | 49.986 | 0.969 | 0 | 1.15 | 0 |
| 6 | 49.986 | 0.953 | 0 | 1.127 | 0 |
| 7 | 50.043 | 0.95 | 2.364 | 43.767 | 1 |
| 8 | 50.216 | 1.2 | 1.967 | 1974.419 | 1 |
| 9 | 50.108 | 0.987 | 0.738 | 1.98 | 0 |
| 10 | 50.045 | 1.016 | 2.294 | 18.755 | 1 |
| 11 | 50.108 | 0.972 | 0.738 | 1.127 | 0 |
| 12 | 49.986 | 0.954 | 0.738 | 0.551 | 0 |
| 13 | 49.803 | 0.984 | 4.868 | 49.238 | 1 |
| 14 | 49.77 | 1.174 | 5.684 | 35.284 | 1 |
| 15 | 49.997 | 0.862 | 0.007 | 2.391 | 0 |
| 16 | 49.928 | 1.106 | 1.72 | 12.699 | 1 |
| 17 | 49.997 | 0.914 | 0.007 | 2.46 | 0 |
| 18 | 50.022 | 0.94 | 0.619 | 10.169 | 0 |
| 19 | 49.977 | 0.902 | 0.233 | 35.521 | 1 |
| 20 | 49.904 | 1.006 | 2.052 | 11.327 | 1 |
| 21 | 49.986 | 0.94 | 0 | 0.328 | 0 |
| 22 | 49.982 | 1.038 | 0.106 | 6.963 | 1 |
| 23 | 49.986 | 0.977 | 0 | 0.282 | 0 |
| 24 | 49.986 | 0.96 | 0 | 0.639 | 0 |
| 25 | 49.952 | 0.916 | 0.857 | 48.117 | 1 |
| 26 | 49.953 | 1.025 | 0.837 | 21.89 | 1 |
| 27 | 49.986 | 0.931 | 0 | 2.799 | 0 |
| 28 | 49.957 | 1.059 | 0.729 | 15.551 | 1 |
| 29 | 49.986 | 0.964 | 0 | 1.653 | 0 |
| 30 | 49.986 | 0.948 | 0 | 1.111 | 0 |
| 31 | 49.977 | 0.908 | 0.233 | 42.504 | 1 |
| 32 | 50.002 | 1.017 | 0.39 | 22.384 | 1 |
| 33 | 49.986 | 0.939 | 0 | 2.203 | 0 |
| 34 | 50.167 | 1.002 | 4.51 | 16.962 | 1 |
| 35 | 49.986 | 0.972 | 0 | 0.29 | 0 |
| 36 | 49.986 | 0.957 | 0 | 0.596 | 0 |
| 37 | 49.952 | 0.912 | 0.857 | 44.299 | 1 |
| 38 | 49.953 | 1.02 | 0.837 | 17.891 | 1 |
| 39 | 49.986 | 0.932 | 0 | 2.07 | 0 |
| 40 | 49.953 | 1.023 | 0.837 | 8.074 | 1 |
| 41 | 49.986 | 0.967 | 0 | 1.598 | 0 |
| 42 | 49.986 | 0.951 | 0 | 1.165 | 0 |
| Class | Cases | Correctly Classified |
|---|---|---|
| Islanded Condition | 21 | 20 (95.2%) |
| Non-Islanded Condition | 21 | 19 (90.4%) |
| Total | 42 | 39 (92.8%) |
| Classes | Training Set | Testing Set | ||
|---|---|---|---|---|
| Total Cases | Correctly Classified | Total Cases | Correctly Classified | |
| Islanding | 44 | 44(100%) | 18 | 17 (94.4%) |
| Non-Islanding | 44 | 44(100%) | 19 | 18(94.7%) |
| Total | 88 | 88(100%) | 37 | 35 (94.5%) |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shrestha, A.; Kattel, R.; Dachhepatic, M.; Mali, B.; Thapa, R.; Singh, A.; Bista, D.; Adhikary, B.; Papadakis, A.; Maskey, R.K. Comparative Study of Different Approaches for Islanding Detection of Distributed Generation Systems. Appl. Syst. Innov. 2019, 2, 25. https://doi.org/10.3390/asi2030025
Shrestha A, Kattel R, Dachhepatic M, Mali B, Thapa R, Singh A, Bista D, Adhikary B, Papadakis A, Maskey RK. Comparative Study of Different Approaches for Islanding Detection of Distributed Generation Systems. Applied System Innovation. 2019; 2(3):25. https://doi.org/10.3390/asi2030025
Chicago/Turabian StyleShrestha, Ashish, Roshan Kattel, Manish Dachhepatic, Bijen Mali, Rajiv Thapa, Ajay Singh, Diwakar Bista, Brijesh Adhikary, Antonis Papadakis, and Ramesh Kumar Maskey. 2019. "Comparative Study of Different Approaches for Islanding Detection of Distributed Generation Systems" Applied System Innovation 2, no. 3: 25. https://doi.org/10.3390/asi2030025