

How Does Exposure to Changing Opinions or Reaffirmation Opinions Influence the Thoughts of Observers and Their Trust in Robot Discussions?
 , ,
, ,
Abstract
:Featured Application
Abstract
1. Introduction
2. Materials and Methods
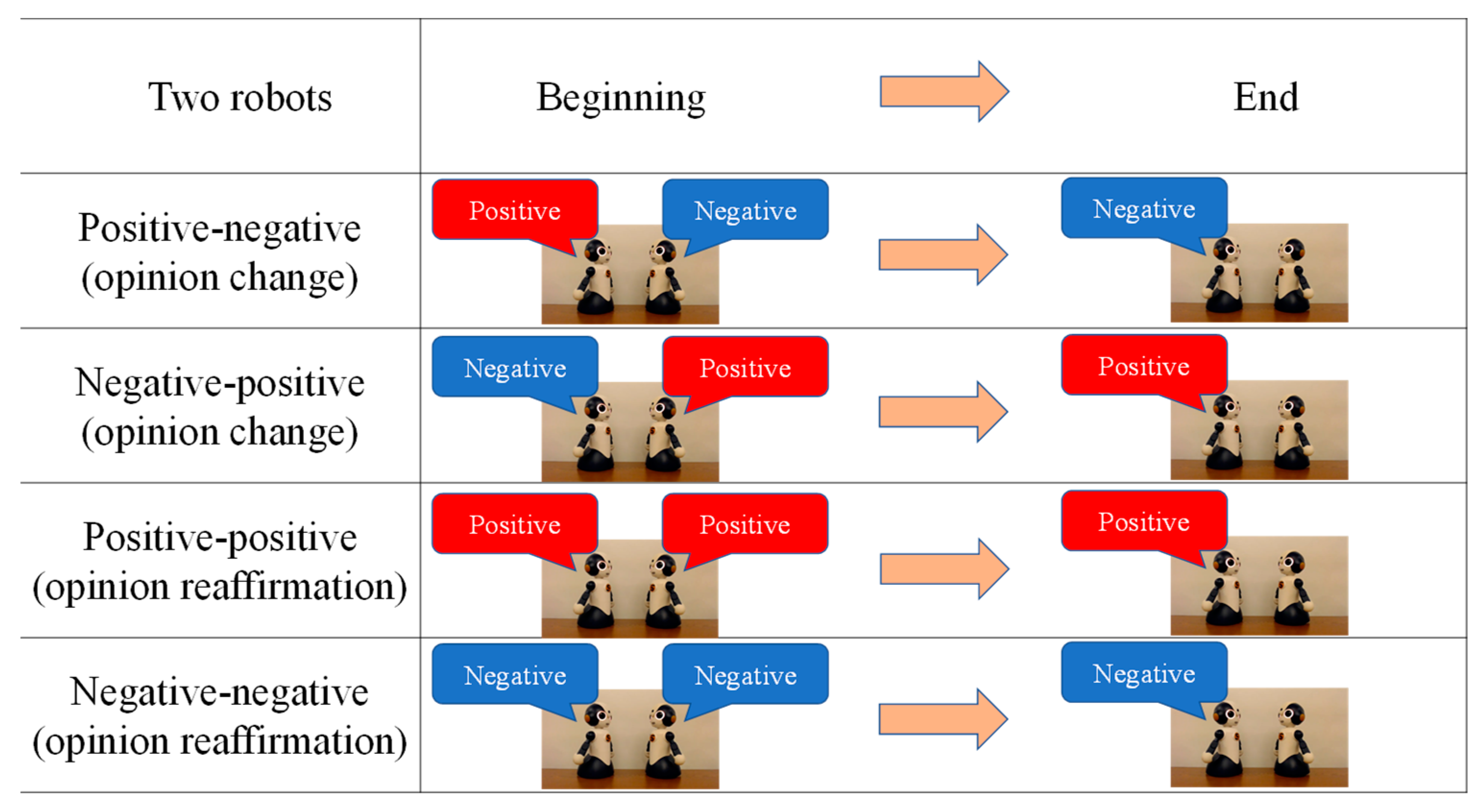
2.1. Visual Stimulus and Conditions
2.1.1. Two-Robot Discussion: Positive–Negative
2.1.2. Two-Robot Discussion: Negative–Positive
2.1.3. Two-Robot Discussion: Positive–Positive
2.1.4. Two-Robot Discussion: Negative–Negative
2.2. Measurement
- -
- The robots fairly covered the first state of emergency.
- -
- The robots unbiasedly covered the first state of emergency.
- -
- The robots told the whole story when covering the first state of emergency.
- -
- The robots accurately covered the first state of emergency.
- -
- The robots separated facts from opinions when covering the first state of emergency.
2.3. Participants
2.4. Procedure
3. Results
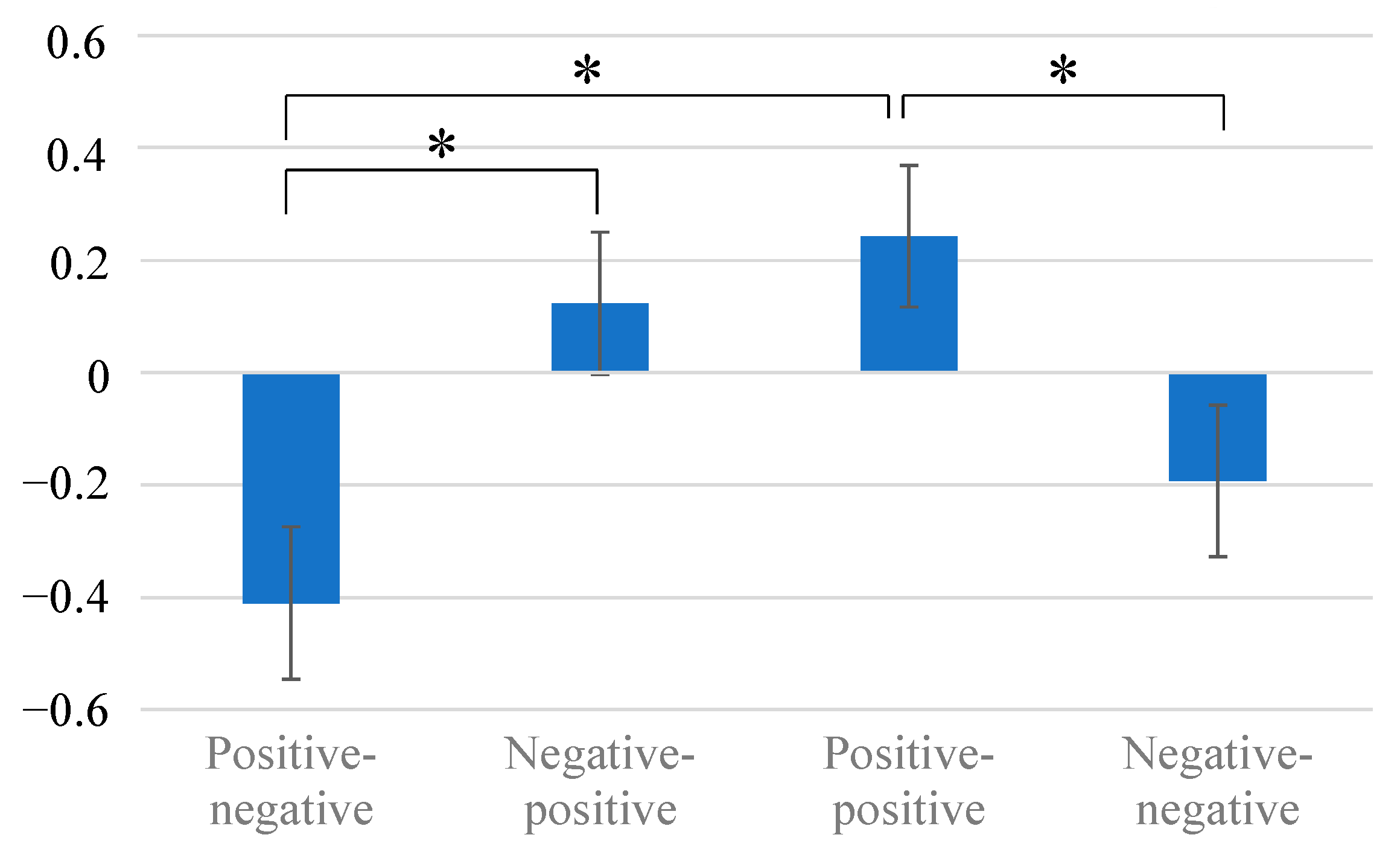
3.1. Questionnaire Results about the Difference in Perceived Impressions
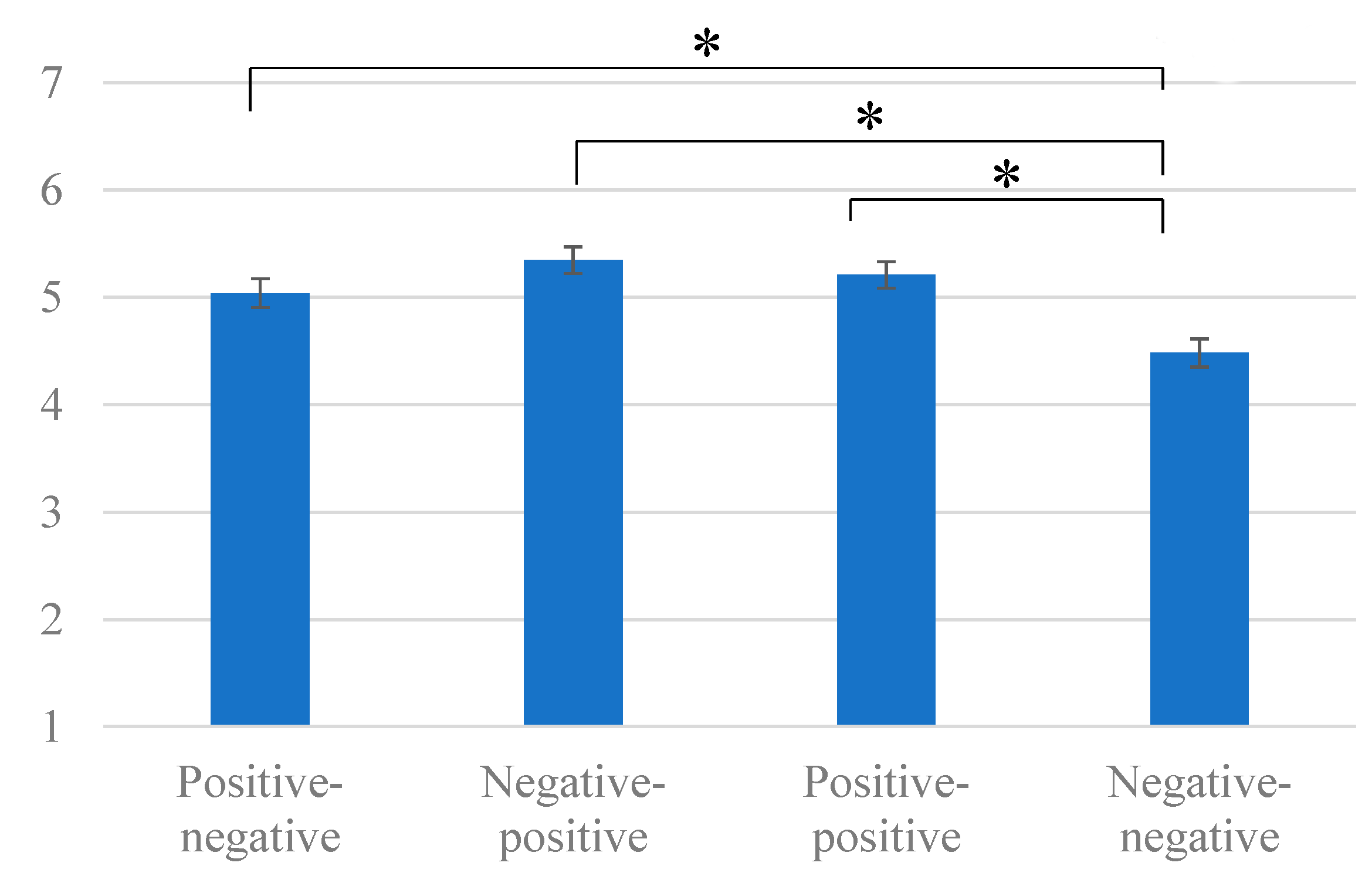
3.2. Questionnaire Results about Perceived Media Trust
3.3. How Many People Changed Their Opinions?
3.4. Summary
4. Discussion
4.1. Design Implications
4.2. Gender Effects
4.3. Limitations and Future Works
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- McGinn, C.; Scott, R.; Donnelly, N.; Roberts, K.L.; Bogue, M.; Kiernan, C.; Beckett, M. Exploring the Applicability of Robot-Assisted UV Disinfection in Radiology. Front. Robot. AI 2021, 7, 590306. [Google Scholar] [CrossRef]
- Zhao, Y.-L.; Huang, H.-P.; Chen, T.-L.; Chiang, P.-C.; Chen, Y.-H.; Yeh, J.-H.; Huang, C.-H.; Lin, J.-F.; Weng, W.-T. A Smart Sterilization Robot System With Chlorine Dioxide for Spray Disinfection. IEEE Sensors J. 2021, 21, 22047–22057. [Google Scholar] [CrossRef]
- Hooks, J.; Ahn, M.S.; Yu, J.; Zhang, X.; Zhu, T.; Chae, H.; Hong, D. ALPHRED: A Multi-Modal Operations Quadruped Robot for Package Delivery Applications. IEEE Robot. Autom. Lett. 2020, 5, 5409–5416. [Google Scholar] [CrossRef]
- Grasse, L.; Boutros, S.J.; Tata, M.S. Speech Interaction to Control a Hands-Free Delivery Robot for High-Risk Health Care Scenarios. Front. Robot. AI 2021, 8, 612750. [Google Scholar] [CrossRef]
- Ruiz-del-Solar, J.; Salazar, M.; Vargas-Araya, V.; Campodonico, U.; Marticorena, N.; Pais, G.; Salas, R.; Alfessi, P.; Rojas, V.C.; Urrutia, J. Mental and Emotional Health Care for COVID-19 Patients: Employing Pudu, a Telepresence Robot. IEEE Robot. Autom. Mag. 2021, 28, 82–89. [Google Scholar] [CrossRef]
- Akiyoshi, T.; Nakanishi, J.; Ishiguro, H.; Sumioka, H.; Shiomi, M. A Robot That Encourages Self-Disclosure to Reduce Anger Mood. IEEE Robot. Autom. Lett. 2021, 6, 7925–7932. [Google Scholar] [CrossRef]
- Mubin, O.; Ahmad, M.I.; Kaur, S.; Shi, W.; Khan, A. Social robots in public spaces: A meta-review. Int. Conf. Soc. Robot. 2018, 11357, 213–220. [Google Scholar]
- Vollmer, A.-L.; Read, R.; Trippas, D.; Belpaeme, T. Children conform, adults resist: A robot group induced peer pressure on normative social conformity. Sci. Robot. 2018, 3, 7111. [Google Scholar] [CrossRef] [Green Version]
- Qin, X.; Chen, C.; Yam, K.C.; Cao, L.; Li, W.; Guan, J.; Zhao, P.; Dong, X.; Lin, Y. Adults still can’t resist: A social robot can induce normative conformity. Comput. Hum. Behav. 2021, 127, 107041. [Google Scholar] [CrossRef]
- Sakamoto, D.; Hayashi, K.; Kanda, T.; Shiomi, M.; Koizumi, S.; Ishiguro, H.; Ogasawara, T.; Hagita, N. Humanoid Robots as a Broadcasting Communication Medium in Open Public Spaces. Int. J. Soc. Robot. 2009, 1, 157–169. [Google Scholar] [CrossRef]
- Shiomi, M.; Okumura, S.; Kimoto, M.; Iio, T.; Shimohara, K. Two is better than one: Social rewards from two agents en-hance offline improvements in motor skills more than single agent. PLoS ONE 2020, 15, e0240622. [Google Scholar] [CrossRef]
- Asch, S.E. Forming impressions of personality. J. Abnorm. Soc. Psychol. 1946, 41, 258. [Google Scholar] [CrossRef]
- Crano, W.D. Primacy versus Recency in Retention of Information and Opinion Change. J. Soc. Psychol. 1977, 101, 87–96. [Google Scholar] [CrossRef]
- Mayo, C.W.; Crockett, W.H. Cognitive complexity and primacy-recency effects in impression formation. J. Abnorm. Soc. Psychol. 1964, 68, 335–338. [Google Scholar] [CrossRef]
- Wilson, W.; Insko, C. Recency effects in face-to-face interaction. J. Personal. Soc. Psychol. 1968, 9, 21. [Google Scholar] [CrossRef]
- Steiner, D.D.; Rain, J.S. Immediate and delayed primacy and recency effects in performance evaluation. J. Appl. Psychol. 1989, 74, 163. [Google Scholar] [CrossRef]
- Demaree, H.A.; Shenal, B.V.; Everhart, D.E.; Robinson, J.L. Primacy and Recency Effects Found Using Affective Word Lists. Cogn. Behav. Neurol. 2004, 17, 102–108. [Google Scholar] [CrossRef]
- Stephane, M.; Ince, N.F.; Kuskowski, M.; Leuthold, A.; Tewfik, A.H.; Nelson, K.; McClannahan, K.; Fletcher, C.R.; Tadipatri, V.A. Neural oscillations associated with the primacy and recency effects of verbal working memory. Neurosci. Lett. 2010, 473, 172–177. [Google Scholar] [CrossRef]
- Forgas, J.P. Can negative affect eliminate the power of first impressions? Affective influences on primacy and recency effects in impression formation. J. Exp. Soc. Psychol. 2010, 47, 425–429. [Google Scholar] [CrossRef]
- Sullivan, J. The Primacy Effect in Impression Formation: Some Replications and Extensions. Soc. Psychol. Pers. Sci. 2018, 10, 432–439. [Google Scholar] [CrossRef]
- Wiedenroth, A.; Wessels, N.M.; Leising, D. There Is No Primacy Effect in Interpersonal Perception: A Series of Pre-registered Analyses Using Judgments of Actual Behavior. Soc. Psychol. Personal. Sci. 2021, 12, 1437–1445. [Google Scholar] [CrossRef]
- Brunel, F.F.; Nelson, M.R. Message order effects and gender differences in advertising persuasion. J. Advert. Res. 2003, 43, 330–341. [Google Scholar] [CrossRef]
- Murphy, J.; Hofacker, C.F.; Mizerski, R. Primacy and Recency Effects on Clicking Behavior. J. Comput. Commun. 2006, 11, 522–535. [Google Scholar] [CrossRef] [Green Version]
- Kim, H.; Fesenmaier, D.R. Persuasive Design of Destination Web Sites: An Analysis of First Impression. J. Travel Res. 2008, 47, 3–13. [Google Scholar] [CrossRef] [Green Version]
- Schüler, A.; Scheiter, K.; Gerjets, P. Is spoken text always better? Investigating the modality and redundancy effect with longer text presentation. Comput. Hum. Behav. 2013, 29, 1590–1601. [Google Scholar] [CrossRef]
- Yuasa, M. Do You Forgive Past Mistakes of Animated Agents? A Study of Instances of Assistance by Animated Agents. J. Adv. Comput. Intell. Intell. Inform. 2020, 24, 404–412. [Google Scholar] [CrossRef]
- Strömbäck, J.; Tsfati, Y.; Boomgaarden, H.; Damstra, A.; Lindgren, E.; Vliegenthart, R.; Lindholm, T. News media trust and its impact on media use: Toward a framework for future research. Ann. Int. Commun. Assoc. 2020, 44, 139–156. [Google Scholar] [CrossRef] [Green Version]
- Downs, J.S.; Holbrook, M.B.; Sheng, S.; Cranor, L.F. Are your participants gaming the system? screening mechanical turk workers. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Atlanta, GA, USA, 10–15 April 2010; pp. 2399–2402. [Google Scholar]
- Oppenheimer, D.M.; Meyvis, T.; Davidenko, N. Instructional manipulation checks: Detecting satisficing to increase statistical power. J. Exp. Soc. Psychol. 2009, 45, 867–872. [Google Scholar] [CrossRef]
- Reeves, B.; Nass, C. The Media Equation: How People Treat Computers, Television, and New Media Like Real People and Places; CSLI Publications and Cambridge: New York, NY, USA, 1996. [Google Scholar]
- Kahn, P.H., Jr.; Kanda, T.; Ishiguro, H.; Freier, N.G.; Severson, R.L.; Gill, B.T.; Ruckert, J.H.; Shen, S. “Robovie, you’ll have to go into the closet now”: Children’s social and moral relationships with a humanoid robot. Dev. Psychol. 2012, 48, 303–314. [Google Scholar] [CrossRef] [Green Version]
- Hayashi, K.; Shiomi, M.; Kanda, T.; Hagita, N. Are Robots Appropriate for Troublesome and Communicative Tasks in a City Environment? IEEE Trans. Auton. Ment. Dev. 2011, 4, 150–160. [Google Scholar] [CrossRef]
- Pinxteren, M.M.V.; Wetzels, R.W.; Rüger, J.; Pluymaekers, M.; Wetzels, M. Trust in humanoid robots: Implications for services marketing. J. Serv. Mark. 2019, 33, 507–518. [Google Scholar] [CrossRef]
- Natarajan, M.; Gombolay, M. Effects of anthropomorphism and accountability on trust in human robot interaction. In Proceedings of the 2020 ACM/IEEE International Conference on Human-Robot Interaction, New York, NY, USA, 23–26 March 2020; pp. 33–42. [Google Scholar]
- Song, Y.; Luximon, Y. The face of trust: The effect of robot face ratio on consumer preference. Comput. Hum. Behav. 2020, 116, 106620. [Google Scholar] [CrossRef]
- Okuoka, K.; Enami, K.; Kimoto, M.; Imai, M. Multi-device trust transfer: Can trust be transferred among multiple de-vices? Front. Psychol. 2022, 13, 920844. [Google Scholar] [CrossRef] [PubMed]
- Siegel, M.; Breazeal, C.; Norton, M.I. Persuasive robotics: The influence of robot gender on human behavior. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 11–14 October 2009; pp. 2563–2568. [Google Scholar] [CrossRef]
- Ham, J.; Midden, C.J.H. A Persuasive Robot to Stimulate Energy Conservation: The Influence of Positive and Negative Social Feedback and Task Similarity on Energy-Consumption Behavior. Int. J. Soc. Robot. 2013, 6, 163–171. [Google Scholar] [CrossRef]
- Salomons, N.; Linden, M.v.d.; Sebo, S.S.; Scassellati, B. Humans Conform to Robots: Disambiguating Trust, Truth, and Conformity. In Proceedings of the 2018 ACM/IEEE International Conference on Human-Robot Interaction, Chicago, IL, USA, 5–8 March 2018; pp. 187–195. [Google Scholar]
- Ji, L.-J.; Peng, K.; Nisbett, R.E. Culture, control, and perception of relationships in the environment. J. Personal. Soc. Psychol. 2000, 78, 943. [Google Scholar] [CrossRef] [PubMed]
- Noguchi, K.; Kamada, A.; Shrira, I. Cultural differences in the primacy effect for person perception. Int. J. Psychol. 2013, 49, 208–210. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
| No Change | Positively Changed | Negatively Changed | |
|---|---|---|---|
| Positive–negative | 28 | 5 | 23 |
| Negative–positive | 43 | 12 | 10 |
| Positive–positive | 42 | 19 | 5 |
| Negative–negative | 31 | 9 | 17 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Itahara, H.; Kimoto, M.; Iio, T.; Shimohara, K.; Shiomi, M. How Does Exposure to Changing Opinions or Reaffirmation Opinions Influence the Thoughts of Observers and Their Trust in Robot Discussions? Appl. Sci. 2023, 13, 585. https://doi.org/10.3390/app13010585
Itahara H, Kimoto M, Iio T, Shimohara K, Shiomi M. How Does Exposure to Changing Opinions or Reaffirmation Opinions Influence the Thoughts of Observers and Their Trust in Robot Discussions? Applied Sciences. 2023; 13(1):585. https://doi.org/10.3390/app13010585
Chicago/Turabian StyleItahara, Hiroki, Mitsuhiko Kimoto, Takamasa Iio, Katsunori Shimohara, and Masahiro Shiomi. 2023. "How Does Exposure to Changing Opinions or Reaffirmation Opinions Influence the Thoughts of Observers and Their Trust in Robot Discussions?" Applied Sciences 13, no. 1: 585. https://doi.org/10.3390/app13010585