

Design Framework for Selection of Grid Topology and Rectangular Cross-Section Size of Elastic Timber Gridshells Using Genetic Optimisation


Abstract
:1. Introduction
2. Design Process
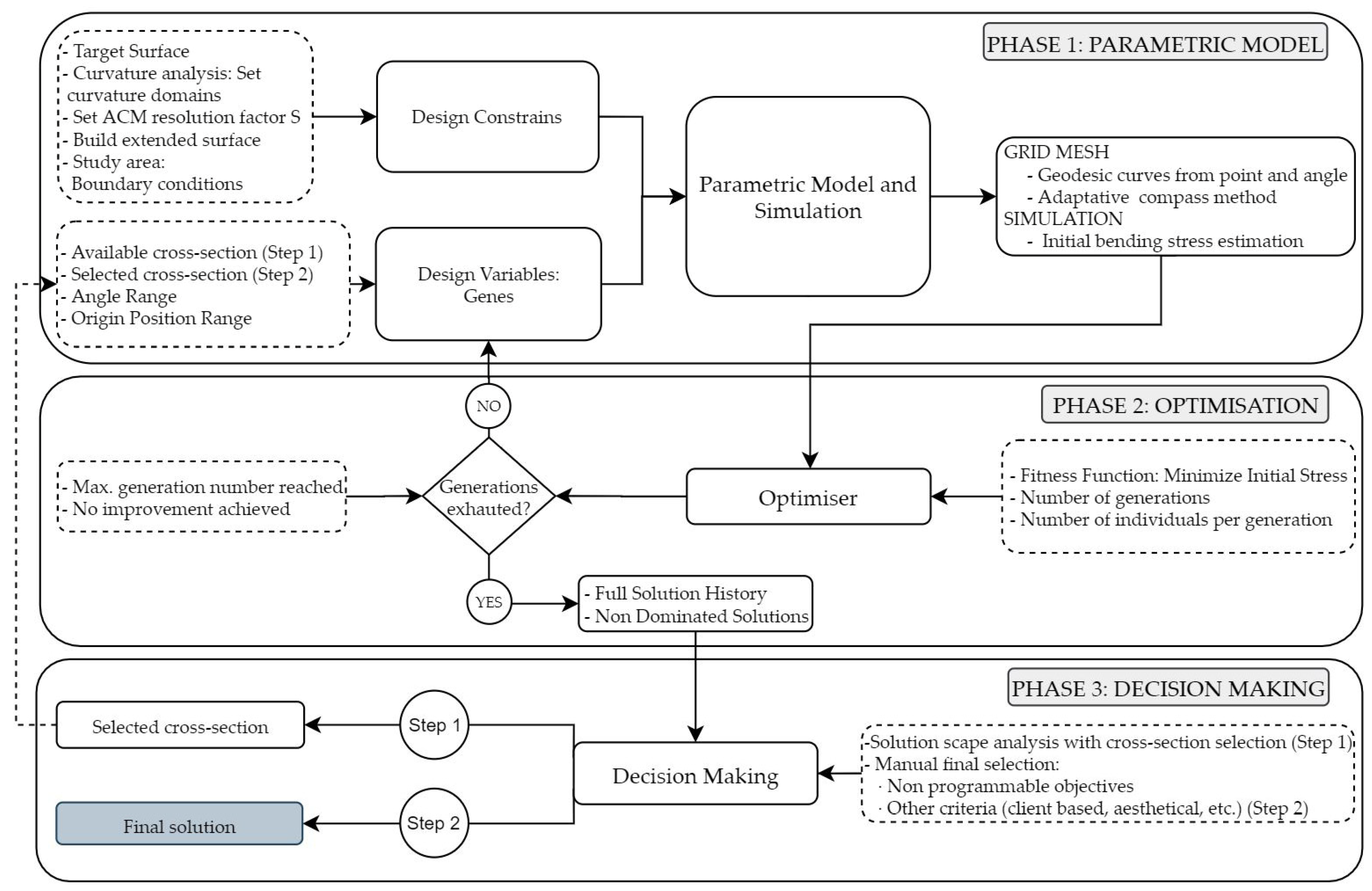
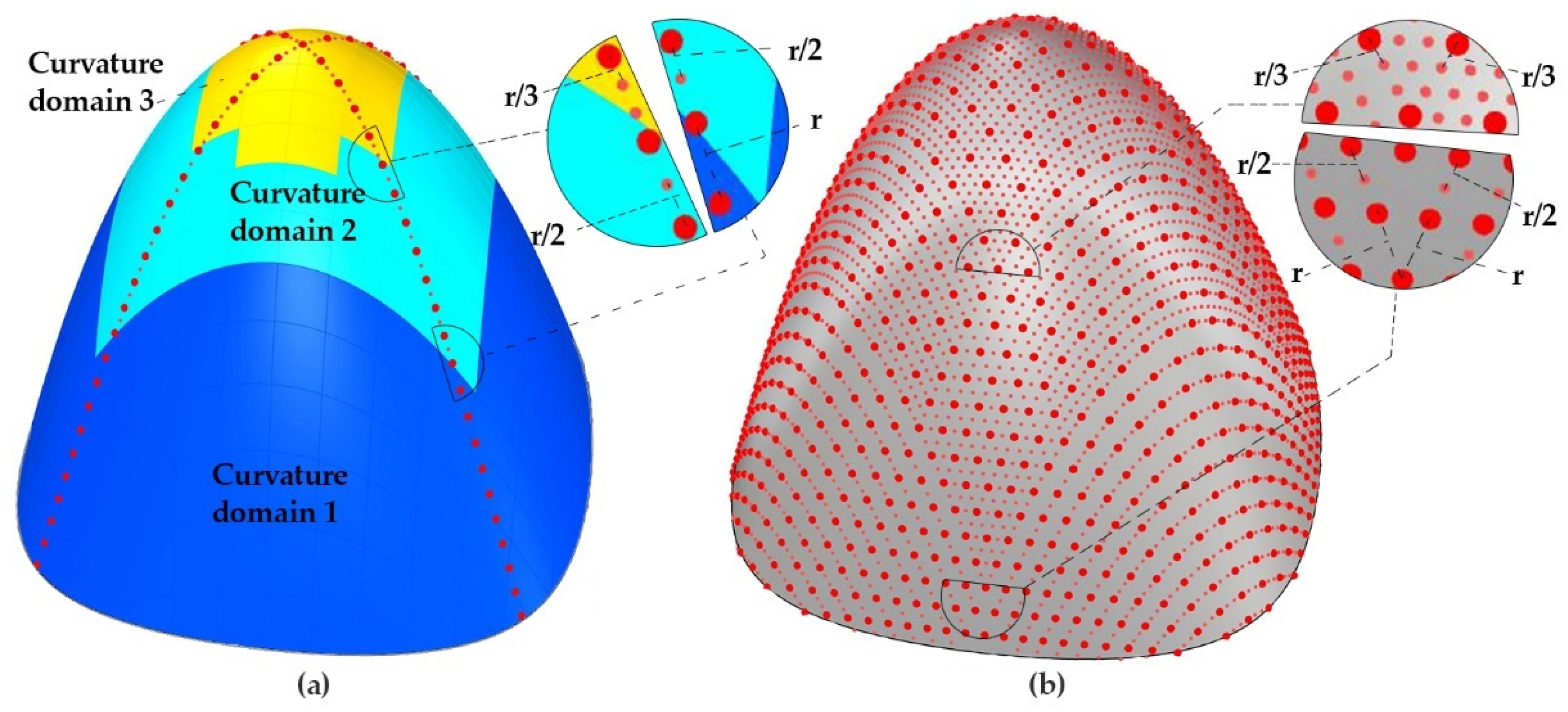
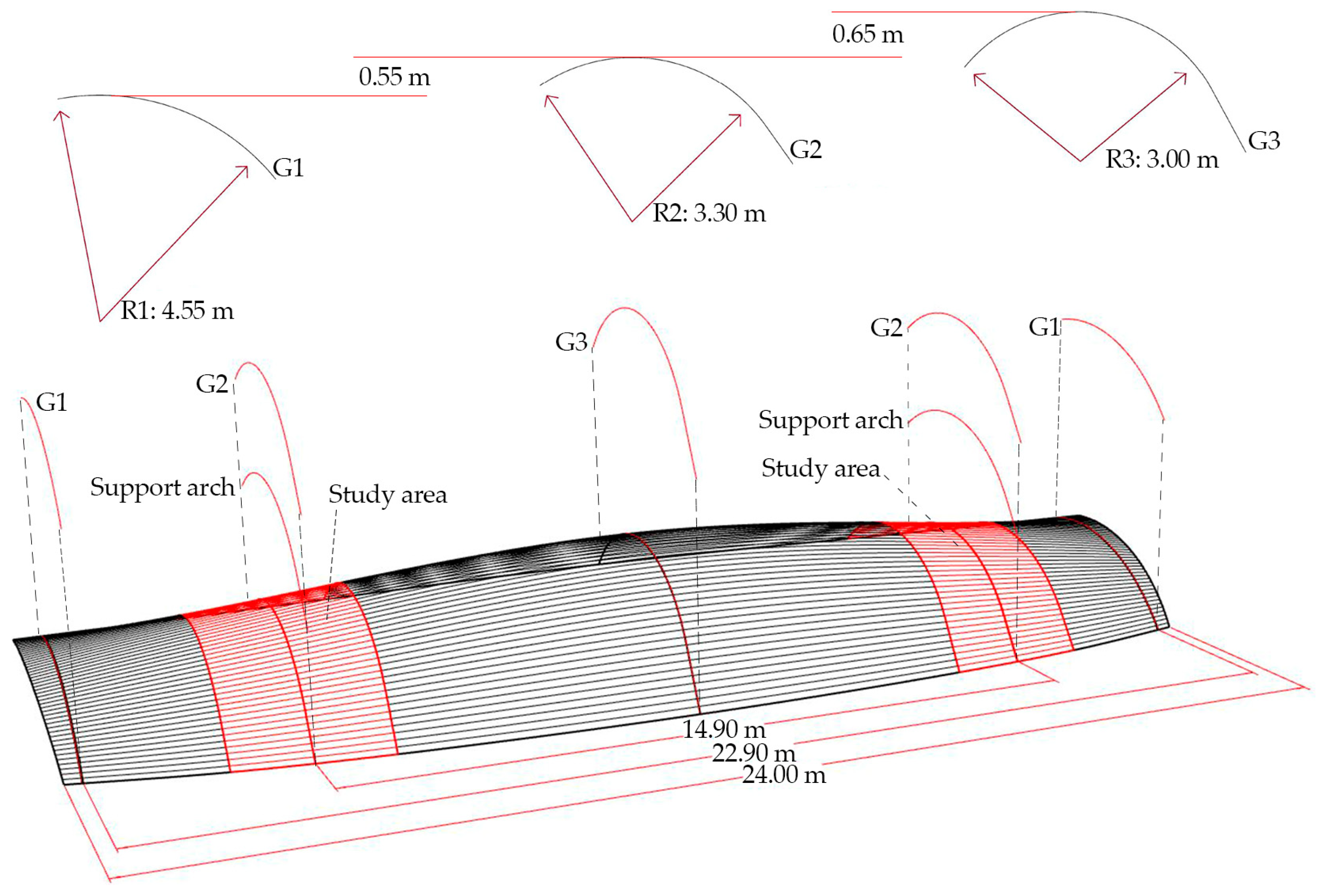
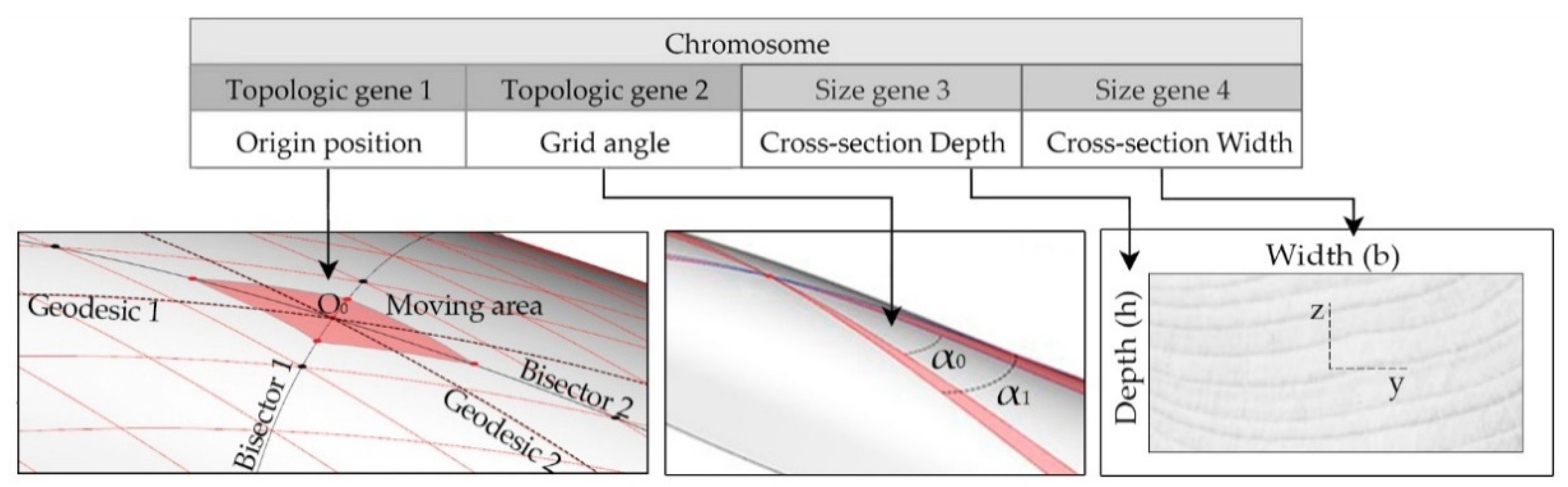
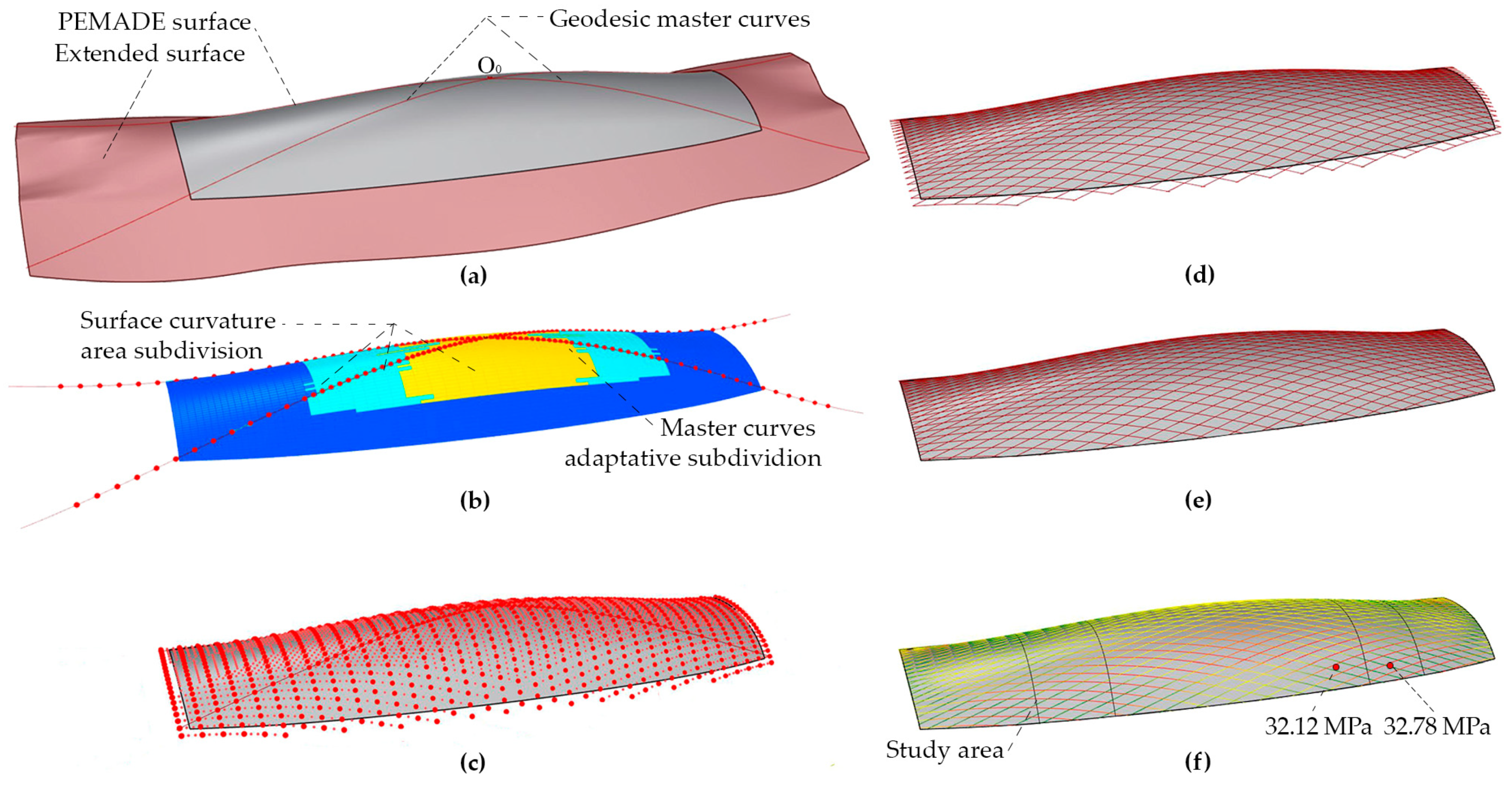
- Phase 1: Parametric model. In this initial phase, the parametric model is built according to the procedure described in Section 3, considering as design constraints the target surface and the study area. The target surface is an external and fixed customer input. The study area is the surface portion where the initial bending stresses are intended to be minimised. It may coincide with the entire target surface, but in general it is of interest to restrict it only to the area of the grid where the highest bending stresses due to external loads (dead loads, snow, wind, etc.) will occur. Next, the parametric model of the gridshell logic considers the design variables that will define its topology and the cross-section size of the laths, which constitute the genes of the optimisation algorithm. In Step 1, the genes are the topological variables (the origin position of the geodesic curves and the grid angle) and the cross-section size variables (depth and width). In Step 2, once the final cross-section is chosen, the genes are the topological variables only. The parametric model will be able to mesh the surface starting from a pair of geodesic curves calculated from a starting point and an angle, and to fill the surface with a full mesh by running the algorithms for geodesic curves and the ACM. To establish the ACM parameters, the algorithm first analyses the curvature of the target surface, allocating the subdivision domains according to the curvature and assigning the resolution factor S. Once the parametric model is built, simulations can be run by estimating the initial bending stress both in the study area, where its minimisation will be required, and in the entire grid to verify that the predefined maximum stress is not exceeded at any point, for each individual valid solution.
- Phase 2: Optimisation. The algorithm performs the optimisation routine based on the Strong Pareto Evolutionary Algorithm 2 (SPEA-2) fed with the data obtained from the parametric model for each generation. It is driven by the minimisation of a fitness function defined later on. As long as the number of generations is below the prescribed maximum and the optimisation process is still in progress, the algorithm loops back to the parametric model, tuning the genes as necessary for optimisation purposes. This phase is detailed in Section 4.
- Phase 3: Decision making. In this final phase detailed in Section 5, the Decision Maker (DM) analyses the solution scape, imposes further requirements and selects the final solution. In Step 1, the range of cross-sections that meet the condition that the maximum bending stress does not exceed the established limit stress is obtained. The DM selects the final cross-section size based on criteria such as the required minimum cross-section width (which may be determined by the diameter of the dowel-type fastener), the cross-sections available in the sawmill, or others. The selected cross-section depth and width are used as fixed input data for the parametric model in Step 2, where a set of mesh solutions varying the topological genes is obtained, in which the maximum initial bending stresses are minimal and near-minimal. Among them, the DM can choose the final solution based not only on mechanical criteria, but also on other non-programmed structural criteria, such as the minimum distances from the connections to the end of the laths or aesthetic issues. Moreover, the DM does not necessarily have to be the engineer performing this method but may be the architect in charge of the final design or even the client who could take into account, for example, aesthetical criteria, among other subjective aspects.
3. Parametric Model Definition
3.1. Surface Meshing Method
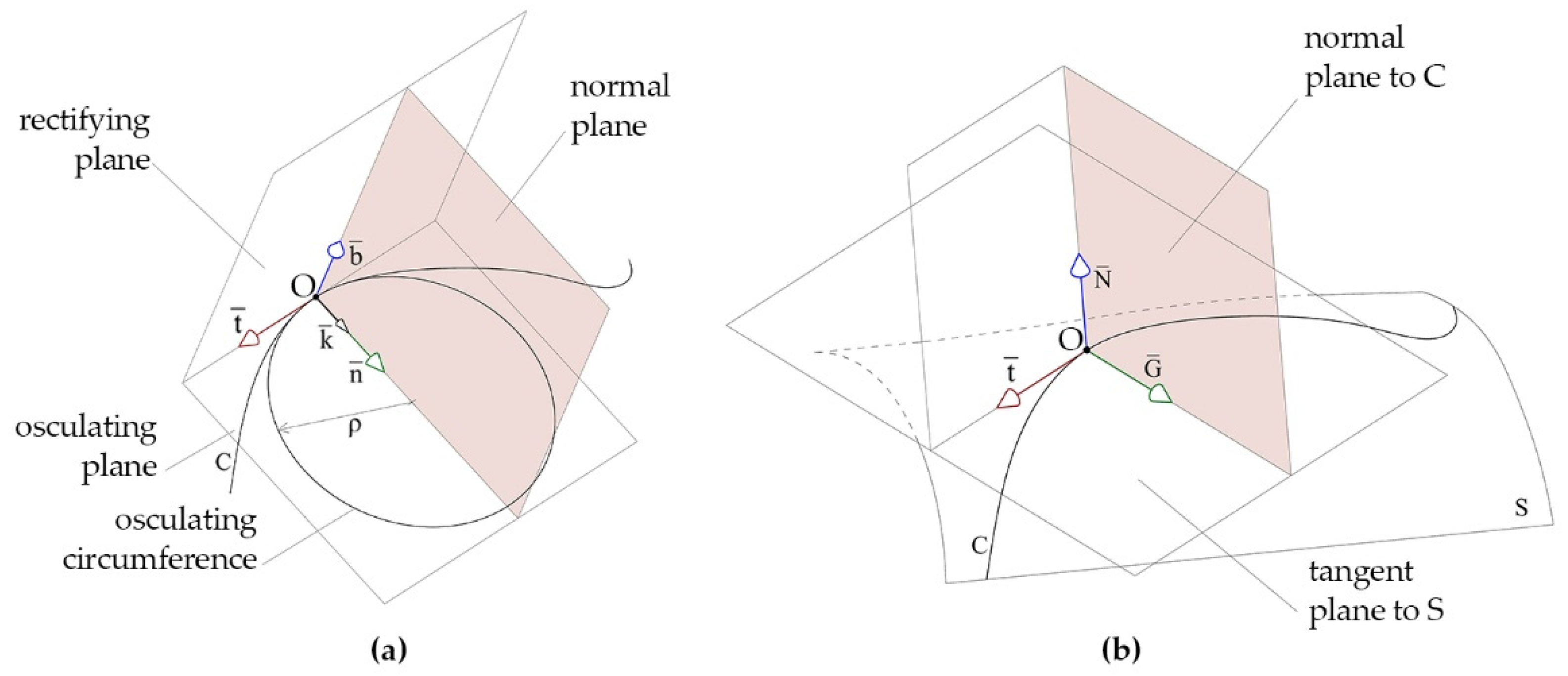
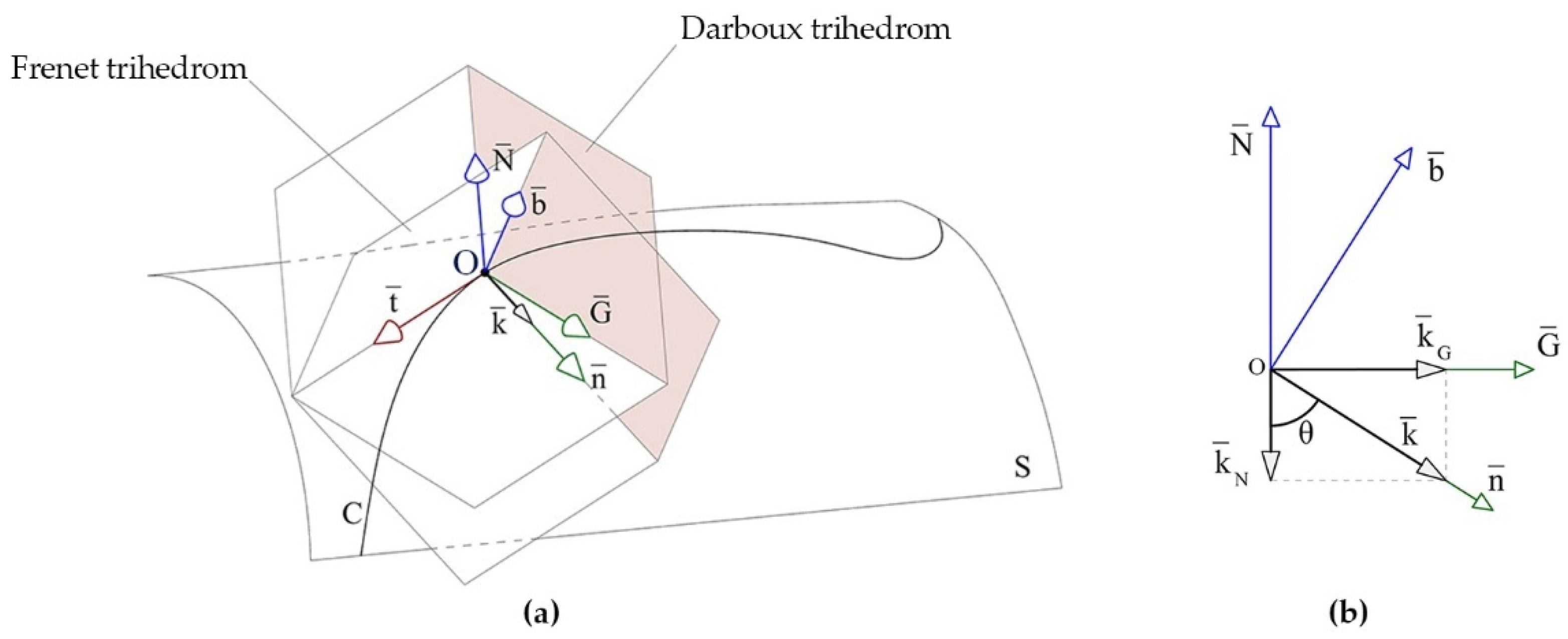
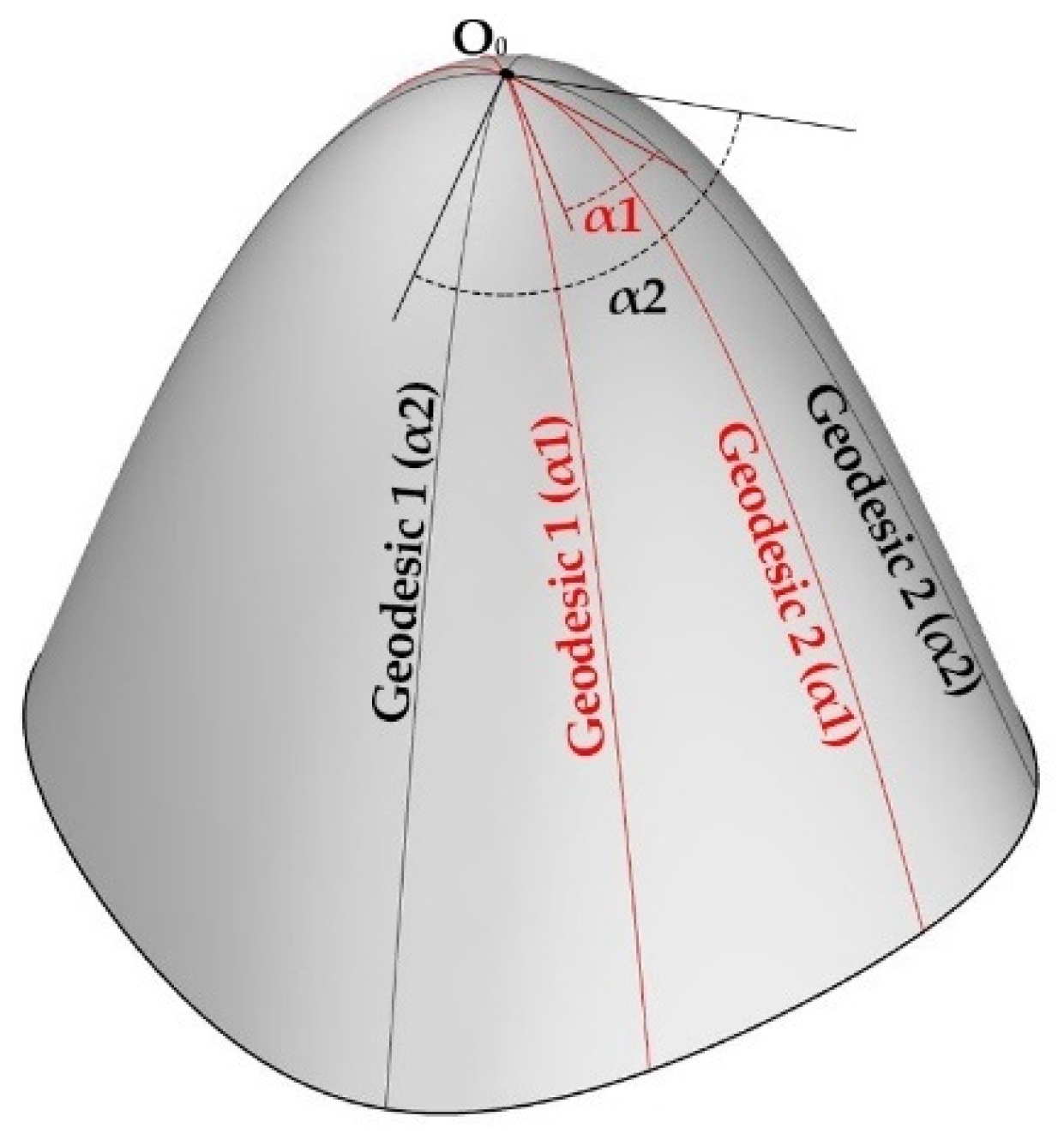
3.1.1. Generation of Geodesic Master Curves: Geometrical Fundamentals
3.1.2. Generation of Geodesic Master Curves: Algorithm Proposal
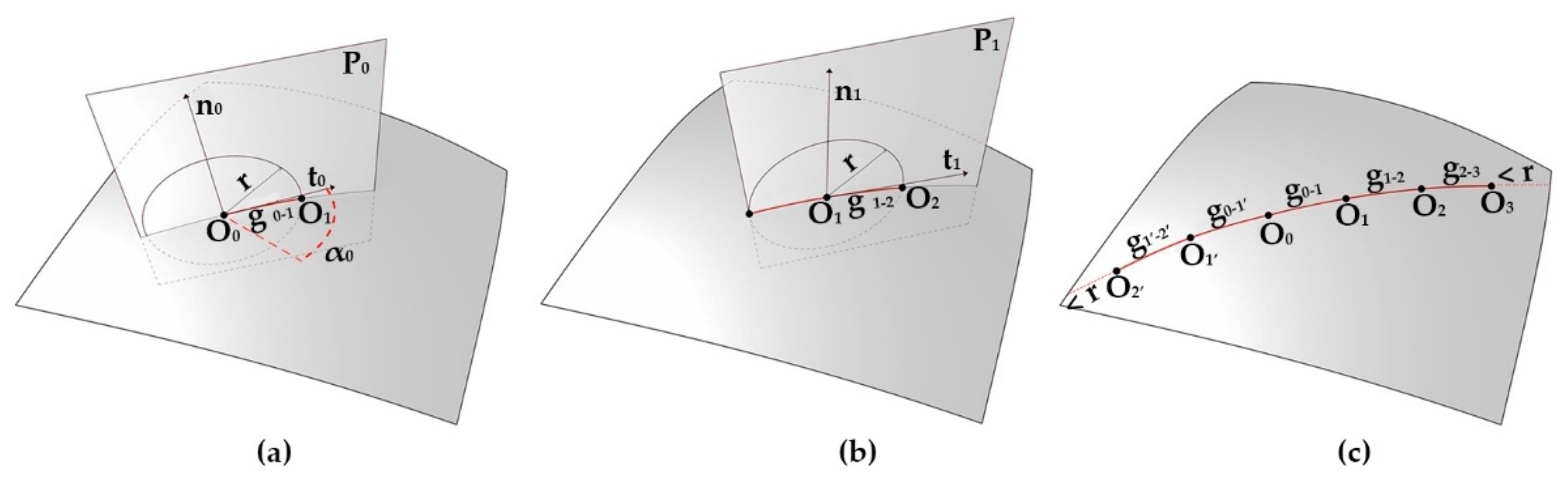
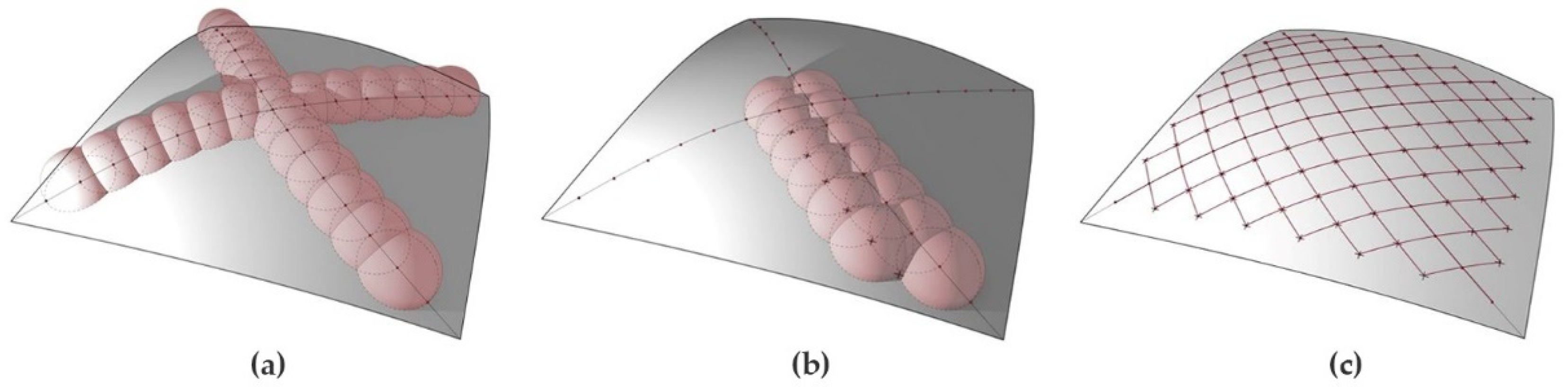
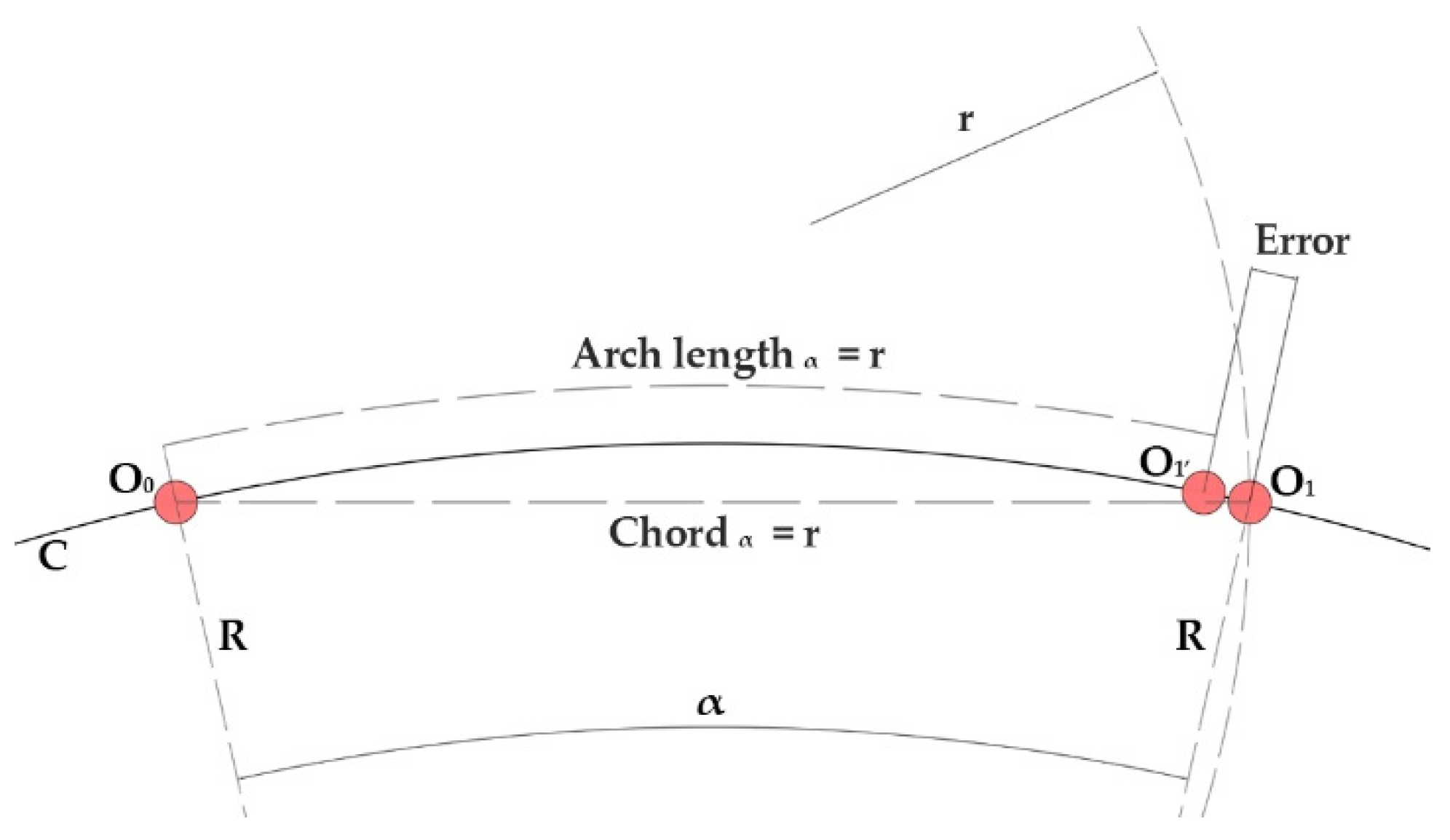
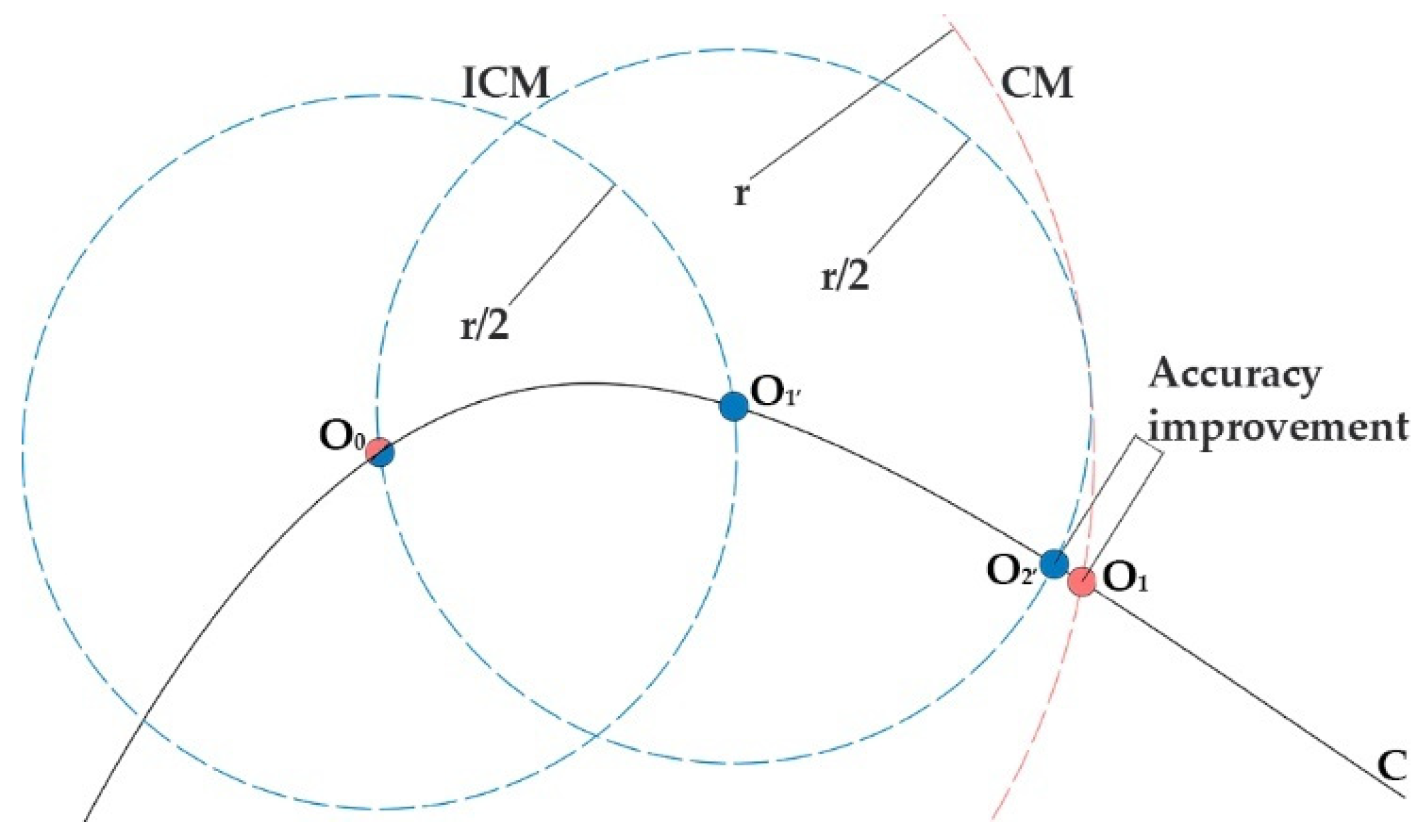
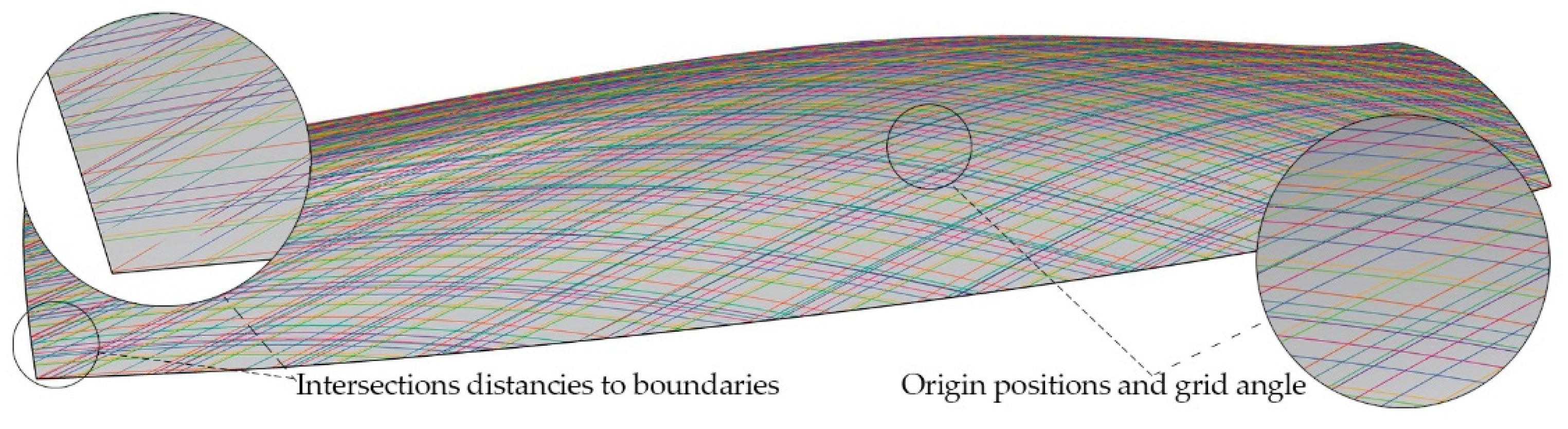
- Starting from O0, it calculates the intersection between the surface and a circumference with a centre at point O0, contained in the plane defined by the normal and the tangent vectors with the prescribed direction at O0. The intersection gives O1. A geodesic curve g0-1 is then generated between O0 and O1 (Figure 5a). The smaller the circumference radius r, the more accurate the results (algorithm resolution). It should be noted that the plane used is precisely the osculating plane of the plotted geodesic, since it is perpendicular to the tangent plane of the surface.
- The tangent vector of the geodesic g0-1 is then obtained at point O1.
- The process is repeated by taking O1 as the new origin and thus obtaining point O2. A geodesic curve g1-2 is then created between O1 and O2 (Figure 5b).
- The process is repeated n times until the intersecting circumference does not intersect the surface because the distance from the last origin point to the boundary is smaller than the radius r, breaking the algorithm (Figure 5c).
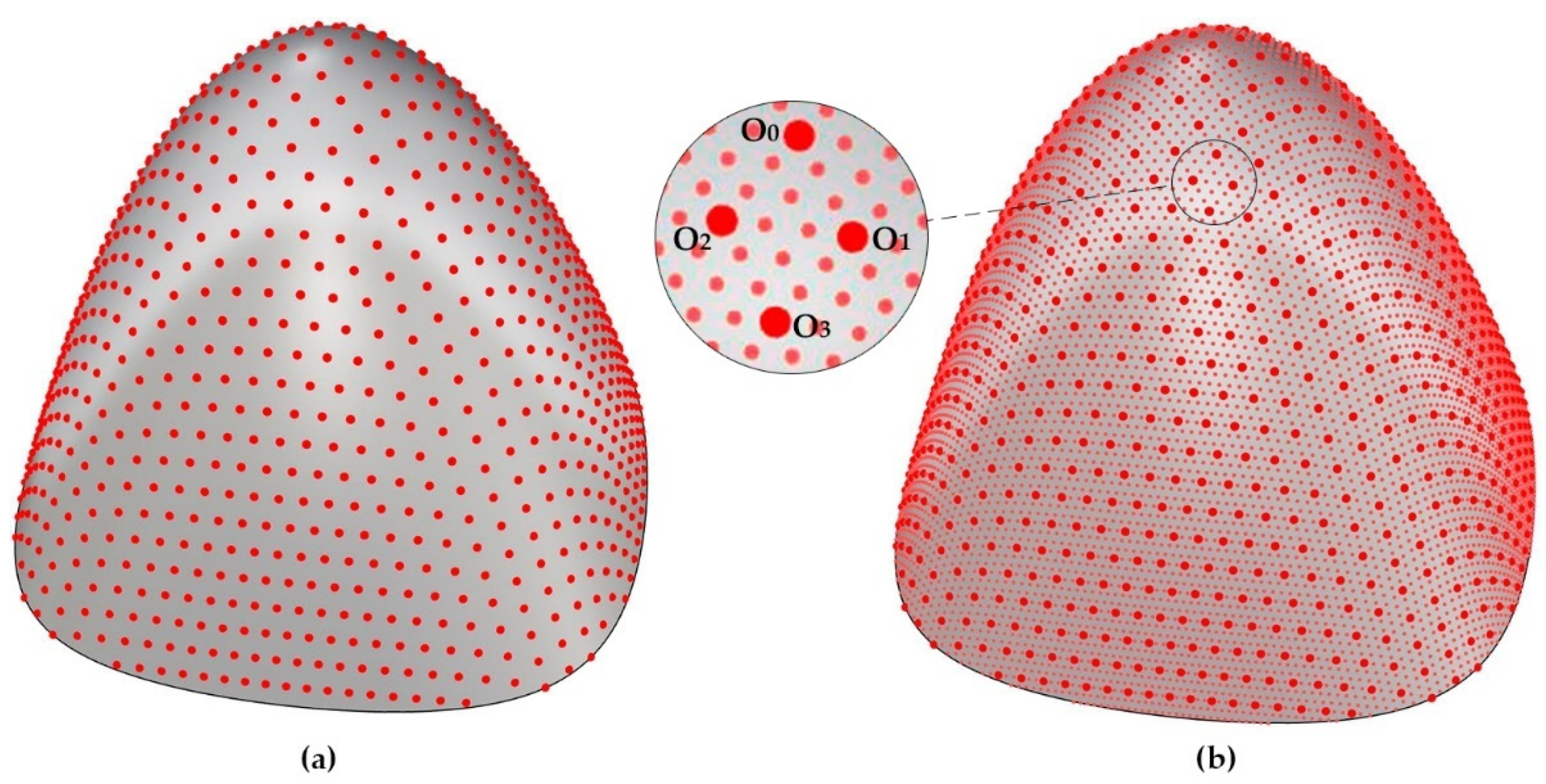
3.1.3. Compass Method Overview
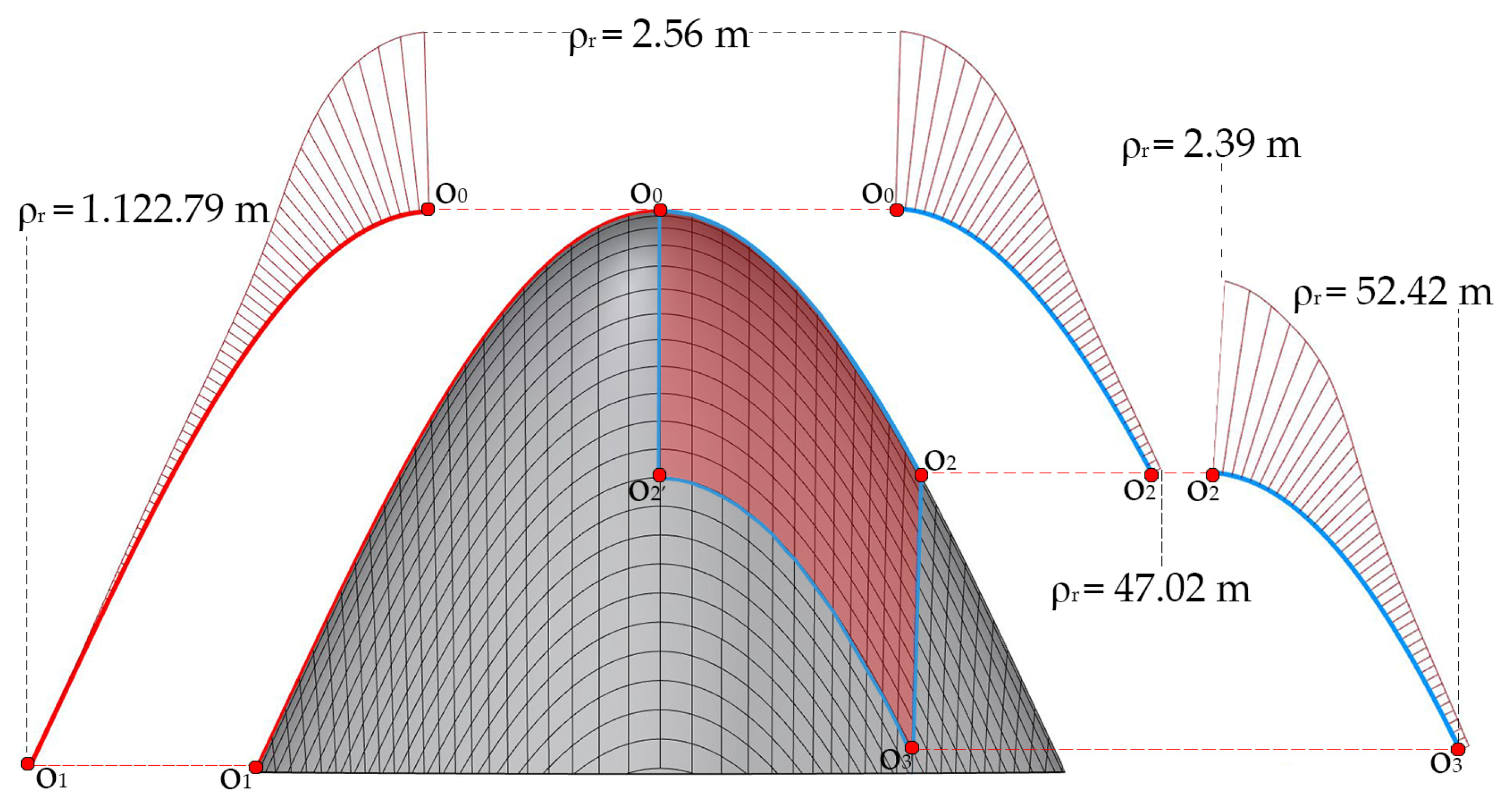
3.1.4. Adaptative Compass Method Proposal
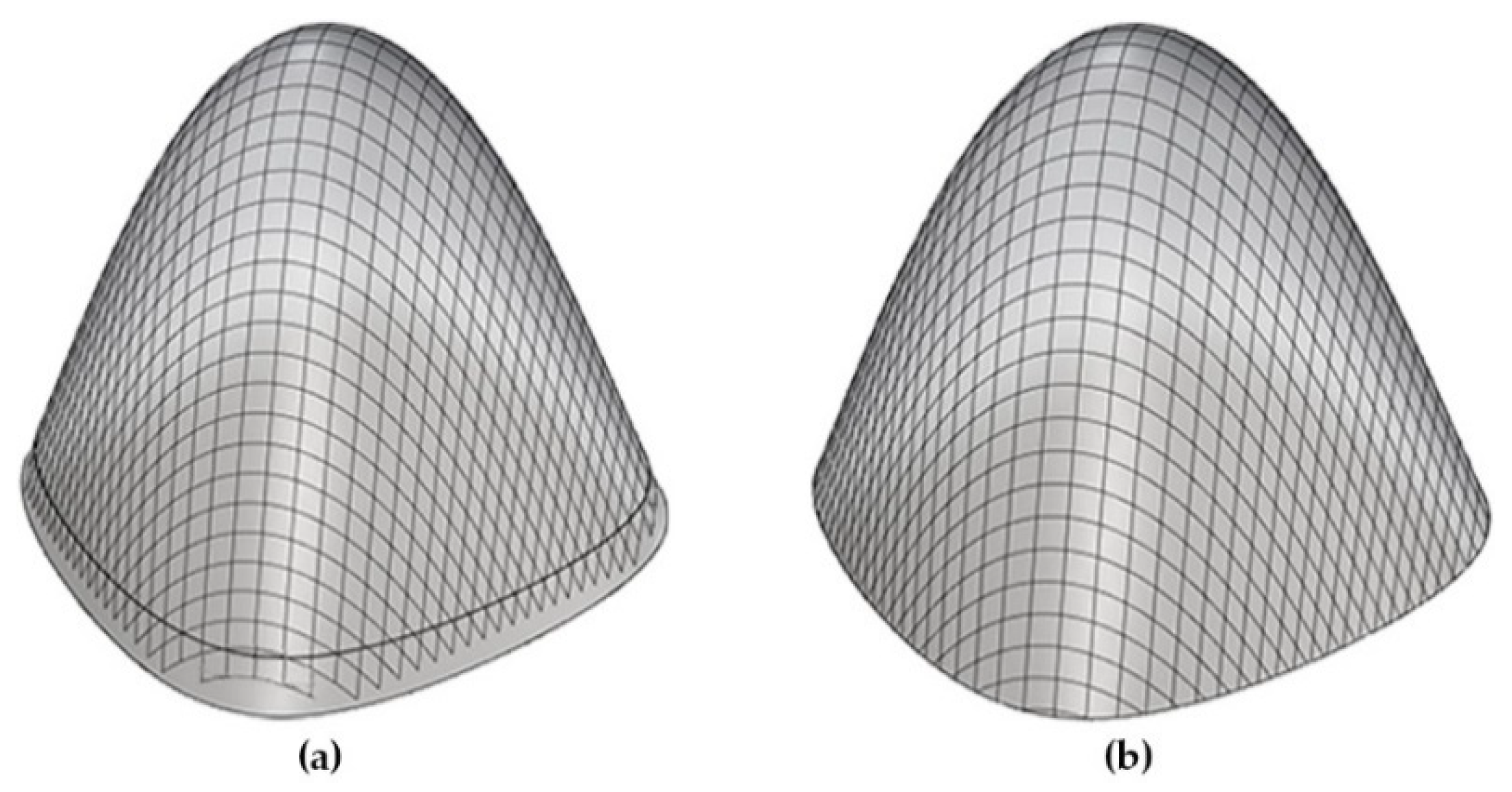
3.1.5. Surface Extension and Trimming
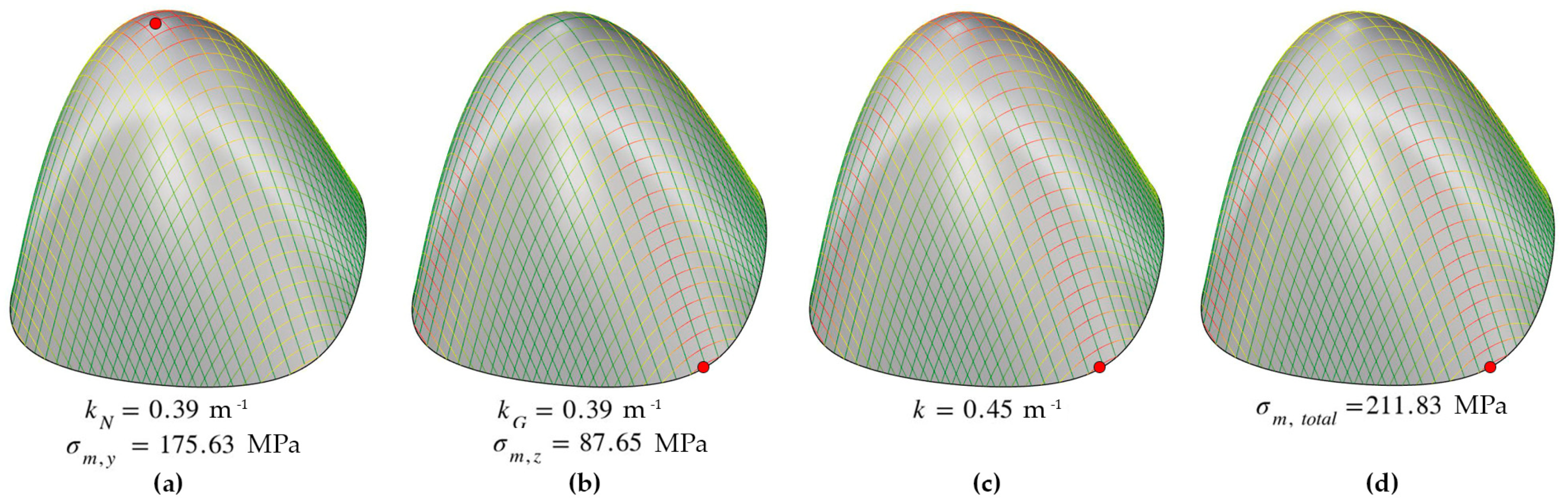
3.2. Stress Evaluation
3.3. Design Constraints
4. Optimisation Method
4.1. Design Variables
4.2. Optimiser and Fitness Function
5. Decision Making
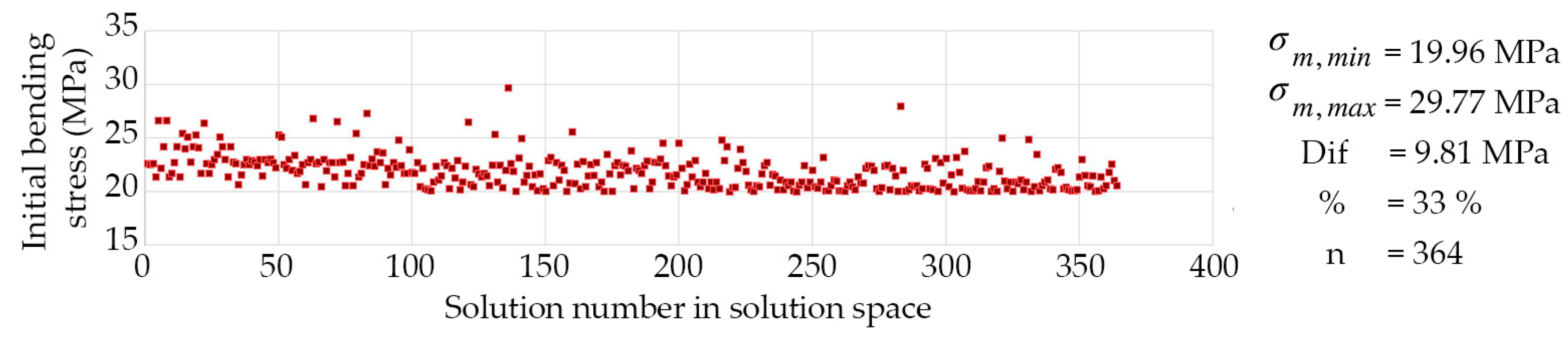
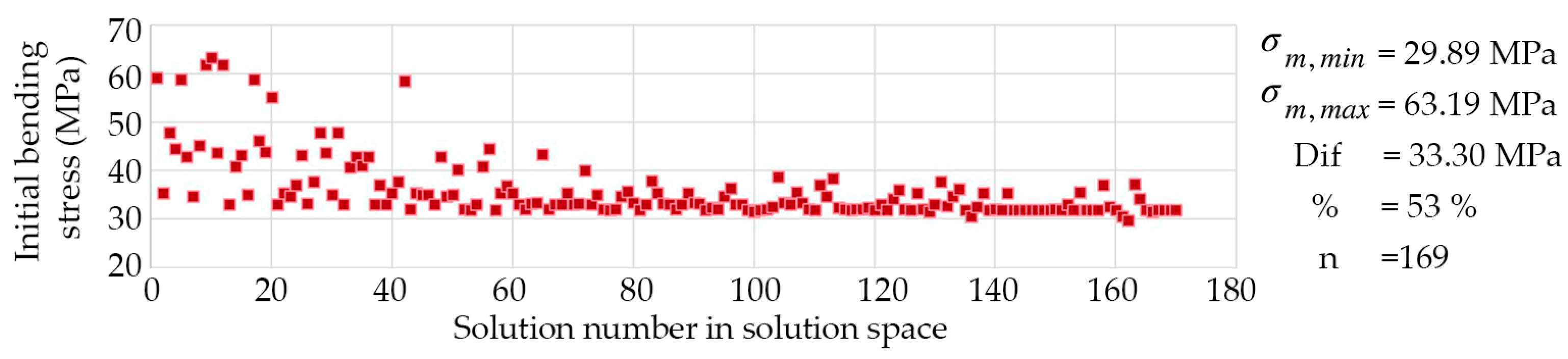
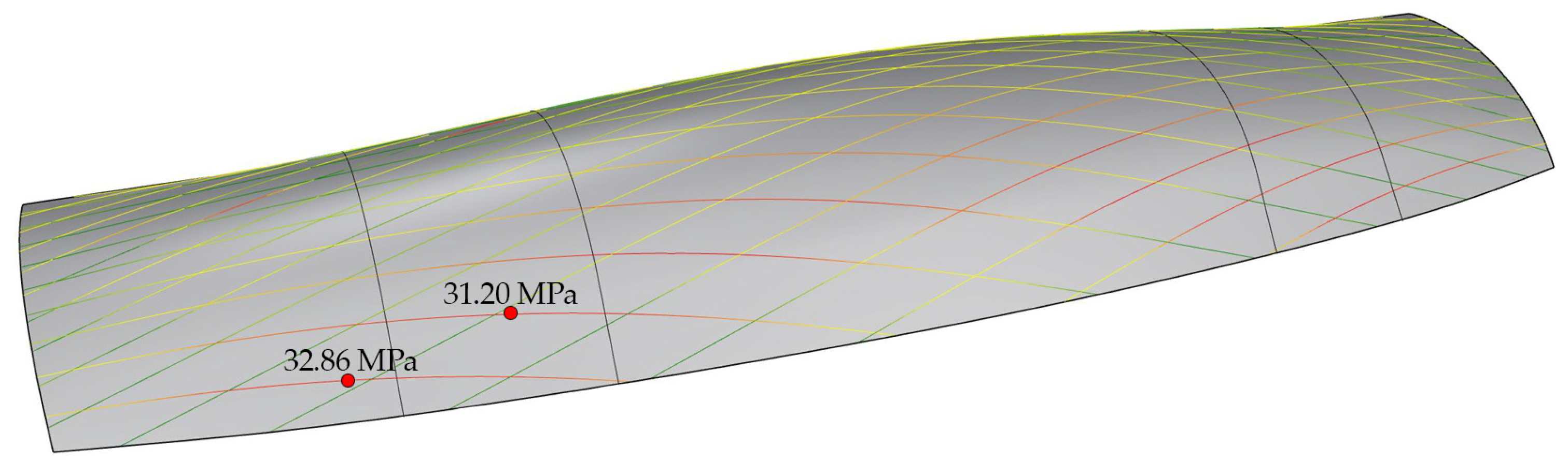
- In Step 1, the field of solutions is limited by incorporating the maximum initial bending stress that cannot be exceeded in the study area. This value must be lower than the design strength of the material, maintaining the structural reserve necessary to resist external loads, and considering the rheological phenomena of the material and the multilayer system action [37]. In this research, Eucalyptus globulus laths GL45 [7,38] and a maximum initial bending stress of 33 MPa were considered. This constraint provides a set of valid cross-section sizes for the DM to choose from.
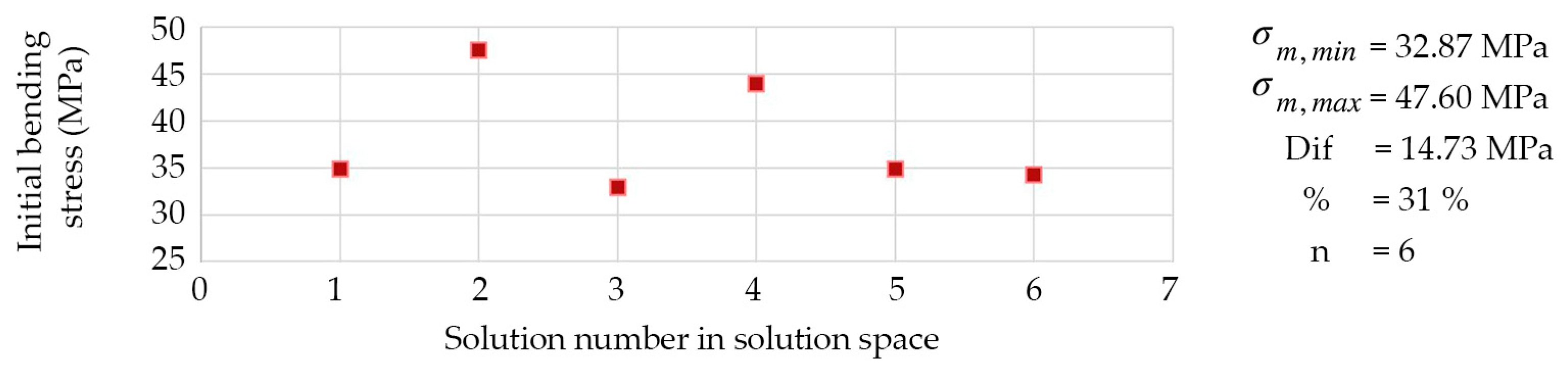
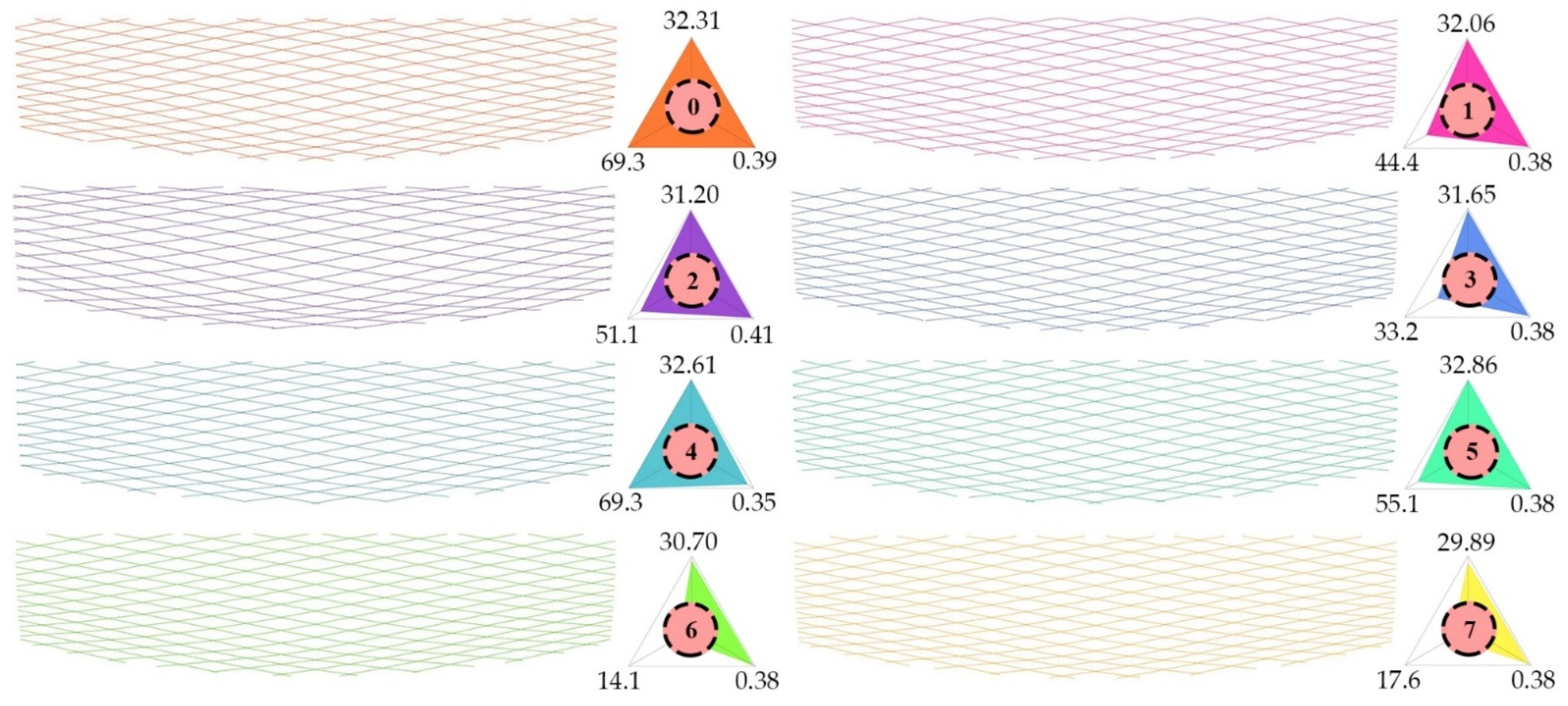
- In Step 2, once the cross-section size is chosen by the DM, a new optimisation process is run in which the algorithm offers a field of near-optimal solutions for the DM to choose according to other non-programmed issues, such as end distances or aesthetic aspects. Step 2 deals only with the topologic genes once the size genes become fixed.
6. Results and Discussion
7. Gridshell Realisation
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Dyvik, S.H.; Manum, B.; Rønnquist, A. Gridshells in Recent Research—A Systematic Mapping Study. Appl. Sci. 2021, 11, 11731. [Google Scholar] [CrossRef]
- Hennicke, J.; Matsushita, K.; Otto, F.; Sataka, K.; Schaur, E.; Shirayanagi, T.; Gröbber, G. IL 10 Gitterschalen; Institut für Leichte Flächentragwerke (IL): Stuttgart, Germany, 1974. [Google Scholar]
- Lefevre, B.; Douthe, C.; Baverel, O. Buckling of elastic gridshells. J. Int. Assoc. Shell Spat. Struct. 2015, 56, 153–171. [Google Scholar]
- Collins, M.; Cosgrove, T. Dynamic relaxation modelling of braced bending active gridshells with rectangular sections. Eng. Struct. 2019, 187, 16–24. [Google Scholar] [CrossRef]
- Quinn, G.C.; Gengnagel, C.; Williams, C.J.K. Comparison of erection methods for long-span strained grid shells. In Proceedings of the International Association for Shell and Spatial Structures (IASS) Symposium, Amsterdam, The Netherlands, 17–20 August 2015. [Google Scholar]
- Ghiyasinasab, M.; Lehoux, N.; Ménard, S. Production Phases and Market for Timber Gridshell Structures: A State-of-the-Art Review. BioResources 2017, 12, 9538–9555. [Google Scholar] [CrossRef]
- Lara-Bocanegra, A.J.; Majano-Majano, A.; Arriaga, F.; Guaita, M. Eucalyptus globulus finger jointed solid timber and glued laminated timber with superior mechanical properties: Characterisation and application in strained gridshells. Constr. Build. Mater. 2020, 265, 120355. [Google Scholar] [CrossRef]
- Lara-Bocanegra, A.J.; Majano-Majano, A.; Arriaga, F.; Guaita, M. Long-term bending stress relaxation in timber laths for the structural design of lattice shells. Constr. Build. Mater. 2018, 193, 565–575. [Google Scholar] [CrossRef]
- Lara-Bocanegra, A.J.; Majano-Majano, A.; Ortiz, J.; Guaita, M. Structural Analysis and Form-Finding of Triaxial Elastic Timber Gridshells Considering Interlayer Slips: Numerical Modelling and Full-Scale Test. Appl. Sci. 2022, 12, 5335. [Google Scholar] [CrossRef]
- Douthe, C.; Caron, J.F.; Baverel, O. Gridshell structures in glass fibre reinforced polymers. Constr. Build. Mater. 2010, 24, 1580–1589. [Google Scholar] [CrossRef]
- Natterer, J.; Burger, N.; Müller, A.; Natterer, J. Holzrippendächer in Brettstapelbauweise—Raumerlebnis durch filigrane Tragwerke. Bautechnik 2000, 77, 783–792. [Google Scholar] [CrossRef]
- Adriaenssens, S.; Barnes, M.; Harris, R.; Williams, C. Dynamic relaxation: Design of a strained timber gridshell. In Shell Structures for Architecture: Form Finding and Optimization; Adriaenssens, S., Block, P., Veenendaal, D., Williams, C., Eds.; Routledge: Abingdon, UK, 2014; pp. 89–102. [Google Scholar]
- Douthe, C.; Baverel, O.; Caron, J.-F. Form-finding of a grid shell in composite materials. J. Int. Assoc. Shell Spat. Struct. 2006, 47, 53–62. [Google Scholar]
- Lafuente Hernández, E.; Baverel, O.; Gengnagel, C. On the Design and Construction of Elastic Gridshells with Irregular Meshes. Int. J. Space Struct. 2013, 28, 161–174. [Google Scholar] [CrossRef]
- D’Amico, B.; Kermani, A.; Zhang, H. Form finding and structural analysis of actively bent timber grid shells. Eng. Struct. 2014, 81, 195–207. [Google Scholar] [CrossRef]
- Bouhaya, L.; Baverel, O.; Caron, J.-F. Mapping two-way continuous elastic grid on an imposed surface. In Proceedings of the International Association for Shell and Spatial Structures (IASS) Symposium, Valencia, Spain, 28 September–2 October 2009. [Google Scholar]
- D’Amico, B.; Kermani, A.; Zhang, H. A form finding method for post formed timber grid shell structures. In Proceedings of the World Conference on Timber Engineering, Quebec City, QC, Canada, 10–14 August 2014. [Google Scholar]
- Harris, R.; Haskins, S.; Roynon, J. The Savill Garden gridshell: Design and construction. Struct. Eng. 2008, 86, 27–34. [Google Scholar]
- Baverel, O.; Caron, J.-F.; Tayeb, F.; Du Peloux, L. Gridshell in Composite Materials: Construction of a 300 m2 Forum for the Solidays’ Festival in Paris. Struct. Eng. Int. 2012, 3, 408–414. [Google Scholar] [CrossRef] [Green Version]
- Popov, E.V. Geometric Approach to Chebyshev Net Generation Along an Arbitrary Surface Represented by NURBS. In Proceedings of the International Conference Graphicon, Nizhny Novgorod, Russia, 29 April 2002. [Google Scholar]
- Deb, K. Multi-objective Genetic Algorithms: Problem Difficulties and Construction of Test Problems. Evol. Comput. 1999, 7, 205–230. [Google Scholar] [CrossRef]
- Jakiela, M.J.; Chapman, C.; Duda, J.; Adewuya, A.; Saitou, K. Continuum structural topology design with genetic algorithms. Comput. Methods Appl. Mech. Eng. 2000, 186, 339–356. [Google Scholar] [CrossRef]
- Holland, J.H. Adaptation in Natural and Artificial Systems. An Introductory Analysis with Applications to Biology, Control, and Artificial Intelligence; MIT Press Ltd.: Cambridge, MA, USA, 1992. [Google Scholar]
- Rocha, M.; Neves, J.M. Preventing Premature Convergence to Local Optima in Genetic Algorithms via Random Offspring Generation. In Multiple Approaches to Intelligent Systems; Springer: Berlin, Germany, 1999. [Google Scholar]
- Konak, A.; Coit, D.W.; Smith, A.E. Multi-objective optimization using genetic algorithms: A tutorial. Reliab. Eng. Syst. Saf. 2006, 91, 992–1007. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef] [Green Version]
- Winslow, P.; Pellegrino, S.; Sharma, S.B. Multi-objective optimization of free-form grid structures. Struct. Multidiscip. Optim. 2010, 40, 257–269. [Google Scholar] [CrossRef]
- Richardson, J.N.; Adriaenssens, S.; Coelho, R.F.; Bouillard, P. Coupled form-finding and grid optimization approach for single layer grid shells. Eng. Struct. 2013, 52, 230–239. [Google Scholar] [CrossRef]
- Grande, E.; Imbimbo, M.; Tomei, V. Role of global buckling in the optimization process of grid shells: Design strategies. Eng. Struct. 2018, 156, 260–270. [Google Scholar] [CrossRef]
- Bouhaya, L.; Baverel, O.; Caron, J.-F. Optimization of gridshell bar orientation using a simplified genetic approach. Struct. Multidiscip. Optim. 2014, 50, 839–848. [Google Scholar] [CrossRef] [Green Version]
- Lara-Bocanegra, A.J.; Roig, A.; Majano-Majano, A.; Guaita, M. Innovative design and construction of a permanent elastic timber gridshell. Proc. Inst. Civ. Eng.—Struct. Build. 2020, 173, 352–362. [Google Scholar] [CrossRef]
- Schiling, E.; Barthel, R. Suchov’s bent networks: The impact of network curvature on Suchov’s gridshell designs. Structures 2021, 29, 1496–1506. [Google Scholar] [CrossRef]
- Crane, K.; Wardetzky, M. A glimpse into discrete differential geometry. Not. Am. Math. Soc. 2017, 64, 1153–1159. [Google Scholar] [CrossRef]
- Du Peloux, L.; Baverel, O.; Caron, J.-F.; Tayeb, F. From shape to shell: A design tool to materialize freeform shapes using gridshells structures. In Proceedings of the Design Modelling Symposium, Berlin, Germany, 28 September–2 October 2013. [Google Scholar]
- Zitzler, E.; Deb, K.; Thiele, L. Comparison of multiobjective evolutionary algorithms: Empirical results. Evol. Comput. 2000, 8, 173–195. [Google Scholar] [CrossRef] [Green Version]
- Fonseca, C.M.; Fleming, P.J. Genetic algorithms for multiobjective optimization—Formulation, discussion and generalization. In Proceedings of the fifth International Conference on Genetic Algorithms, Urbana, IL, USA, 17–19 July 1993. [Google Scholar]
- Lara-Bocanegra, A.J. Elastic timber gridshells. From material to construction. Ph.D. Thesis, Universidad Politécnica de Madrid, Madrid, Spain, 13 June 2022. [Google Scholar]
- Lara-Bocanegra, A.J.; Majano-Majano, A.; Crespo, J.; Guaita, M. Finger-jointed Eucalyptus globulus with 1C-PUR adhesive for high performance engineered laminated products. Constr. Build. Mater. 2017, 135, 529–537. [Google Scholar] [CrossRef]




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Accuracy Improvement (mm) | Multiplier of Runtime | ||
|---|---|---|---|
| Method | Test Point O1 rρ,mean 1 = 205.71 m Path Length = 15.33 m | Test Point O3 rρ,mean 1 = 17.89 m Path Length = 17.22 m | |
| ICM | 4.48 | 8.46 | ×6.77 |
| ACM | 4.47 | 8.42 | ×2.66 |
| Depth (mm) | Width (mm) | |||||||
|---|---|---|---|---|---|---|---|---|
| 50 | 55 | 60 | 65 | 70 | 75 | 80 | ||
| 25 | σm,min (MPa) | 19.96 | 21.54 | 23.19 | 27.85 | 30.69 | 31.92 | 31.70 |
| σm,max (MPa) | 29.77 | 48.82 | 43.07 | 51.27 | 44.87 | 43.52 | 36.98 | |
| AI 1 (MPa) | 9.81 | 27.28 | 19.88 | 23.42 | 14.18 | 11.6 | 5.28 | |
| RI 2 | 0.33 | 0.56 | 0.46 | 0.46 | 0.32 | 0.27 | 0.14 | |
| n | 364 | 75 | 15 | 4 | 7 | 8 | 6 | |
| 30 | σm,min (MPa) | 21.00 | 22.53 | 24.30 | 29.24 | 31.37 | 32.88 | 31.49 |
| σm,max (MPa) | 44.38 | 51.86 | 44.94 | 56.17 | 59.74 | 47.60 | 60.00 | |
| AI 1 (MPa) | 23.38 | 29.33 | 20.64 | 26.93 | 28.37 | 14.72 | 28.51 | |
| RI 2 | 0.53 | 0.57 | 0.46 | 0.48 | 0.47 | 0.31 | 0.48 | |
| n | 184 | 86 | 22 | 12 | 10 | 6 | 11 | |
| 35 | σm,min (MPa) | 22.39 | 23.92 | 25.41 | 29.80 | 29.08 1 | 31.23 1 | 33.90 |
| σm,max (MPa) | 44.97 | 60.51 | 64.53 | 51.30 | 60.27 | 64.54 | 54.67 | |
| AI 1 (MPa) | 22.58 | 36.59 | 39.12 | 21.5 | 30.29 | 33.31 | 20.77 | |
| RI 2 | 0.50 | 0.60 | 0.61 | 0.42 | 0.50 | 0.52 | 0.38 | |
| n | 16 | 34 | 14 | 18 | 13 | 10 | 2 | |
| 40 | σm,min (MPa) | 25.31 | 26.56 | 27.80 | 29.40 | 31.02 | 32.20 | 55.92 |
| σm,max (MPa) | 63.66 | 59.00 | 55.25 | 74.41 | 57.35 | 68.15 | 70.20 | |
| AI 1 (MPa) | 38.35 | 32.44 | 27.45 | 45.01 | 26.33 | 35.95 | 14.28 | |
| RI 2 | 0.60 | 0.55 | 0.50 | 0.60 | 0.46 | 0.53 | 0.20 | |
| n | 7 | 23 | 10 | 10 | 6 | 19 | 2 | |
| 45 | σm,min (MPa) | 30.11 | 29.18 | 31.58 | 36.14 | 35.24 | 34.95 | 38.07 |
| σm,max (MPa) | 53.43 | 70.54 | 72.22 | 81.91 | 77.71 | 66.66 | 78.66 | |
| AI 1 (MPa) | 23.32 | 41.36 | 40.64 | 45.77 | 42.47 | 31.71 | 40.59 | |
| RI2 | 0.44 | 0.59 | 0.56 | 0.56 | 0.55 | 0.48 | 0.52 | |
| n | 6 | 19 | 13 | 6 | 12 | 7 | 11 | |
| 50 | σm,min (MPa) | 33.52 | 32.24 | 52.27 | 61.59 | 49.61 | 47.31 | 41.69 |
| σm,max (MPa) | 44.51 | 75.87 | 52.27 | 88.78 | 49.61 | 81.84 | 41.69 | |
| AI 1 (MPa) | 10.99 | 43.63 | 0 | 27.19 | 0 | 34.53 | 0 | |
| RI2 | 0.25 | 0.58 | 0 | 0.31 | 0 | 0.42 | 0 | |
| n | 5 | 7 | 1 | 3 | 1 | 5 | 1 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Roig, A.; Lara-Bocanegra, A.J.; Xavier, J.; Majano-Majano, A. Design Framework for Selection of Grid Topology and Rectangular Cross-Section Size of Elastic Timber Gridshells Using Genetic Optimisation. Appl. Sci. 2023, 13, 63. https://doi.org/10.3390/app13010063
Roig A, Lara-Bocanegra AJ, Xavier J, Majano-Majano A. Design Framework for Selection of Grid Topology and Rectangular Cross-Section Size of Elastic Timber Gridshells Using Genetic Optimisation. Applied Sciences. 2023; 13(1):63. https://doi.org/10.3390/app13010063
Chicago/Turabian StyleRoig, Antonio, Antonio José Lara-Bocanegra, José Xavier, and Almudena Majano-Majano. 2023. "Design Framework for Selection of Grid Topology and Rectangular Cross-Section Size of Elastic Timber Gridshells Using Genetic Optimisation" Applied Sciences 13, no. 1: 63. https://doi.org/10.3390/app13010063