
Different Path Planning Techniques for an Indoor Omni-Wheeled Mobile Robot: Experimental Implementation, Comparison and Optimization


Abstract
:1. Introduction
- Easier to control motors and implement path-tracking algorithms;
- The body weight is distributed over four wheels. So, the robot can accelerate faster and greater speed is achieved because slippage is minimum;
- The robot body is more stable during turns and in slopes during rotations.
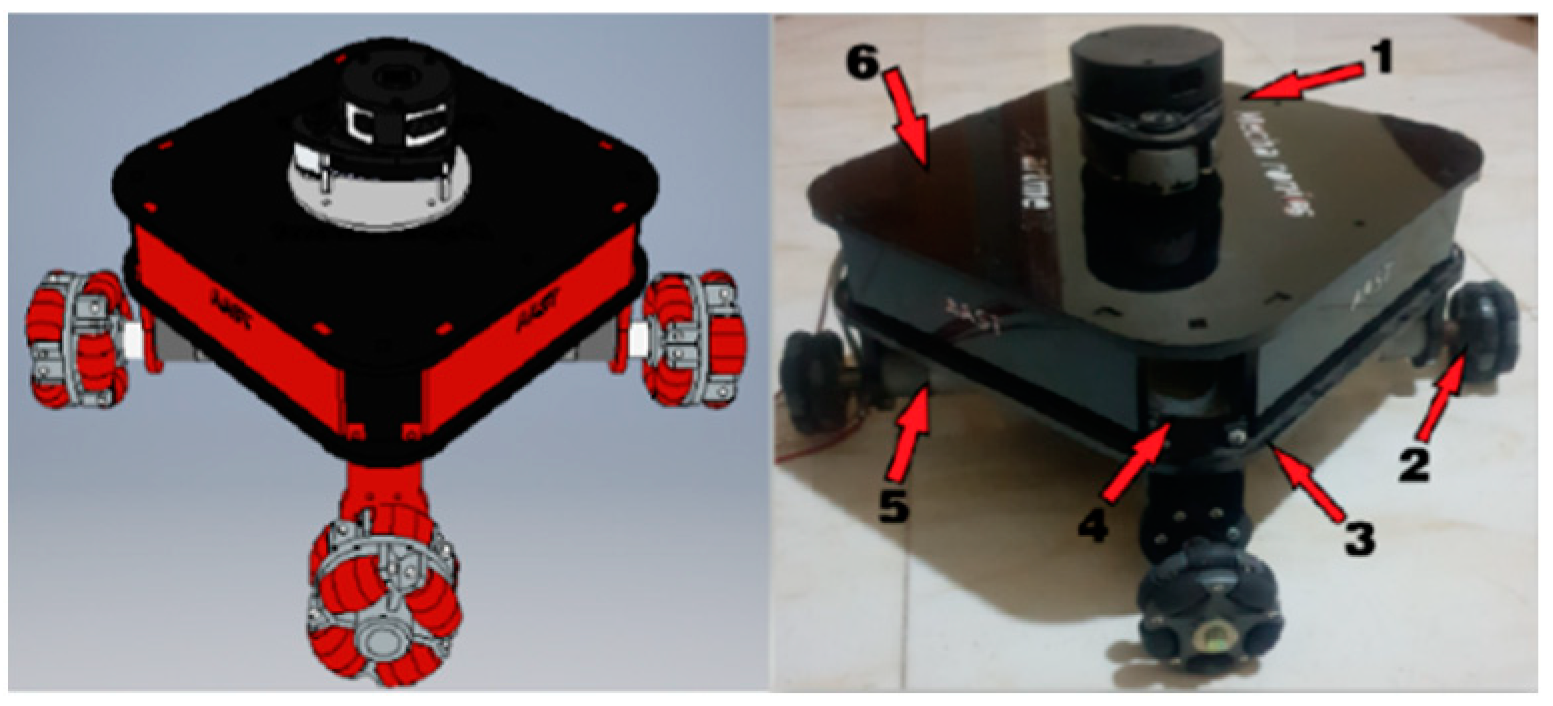
2. Specifications of the 4OWMR
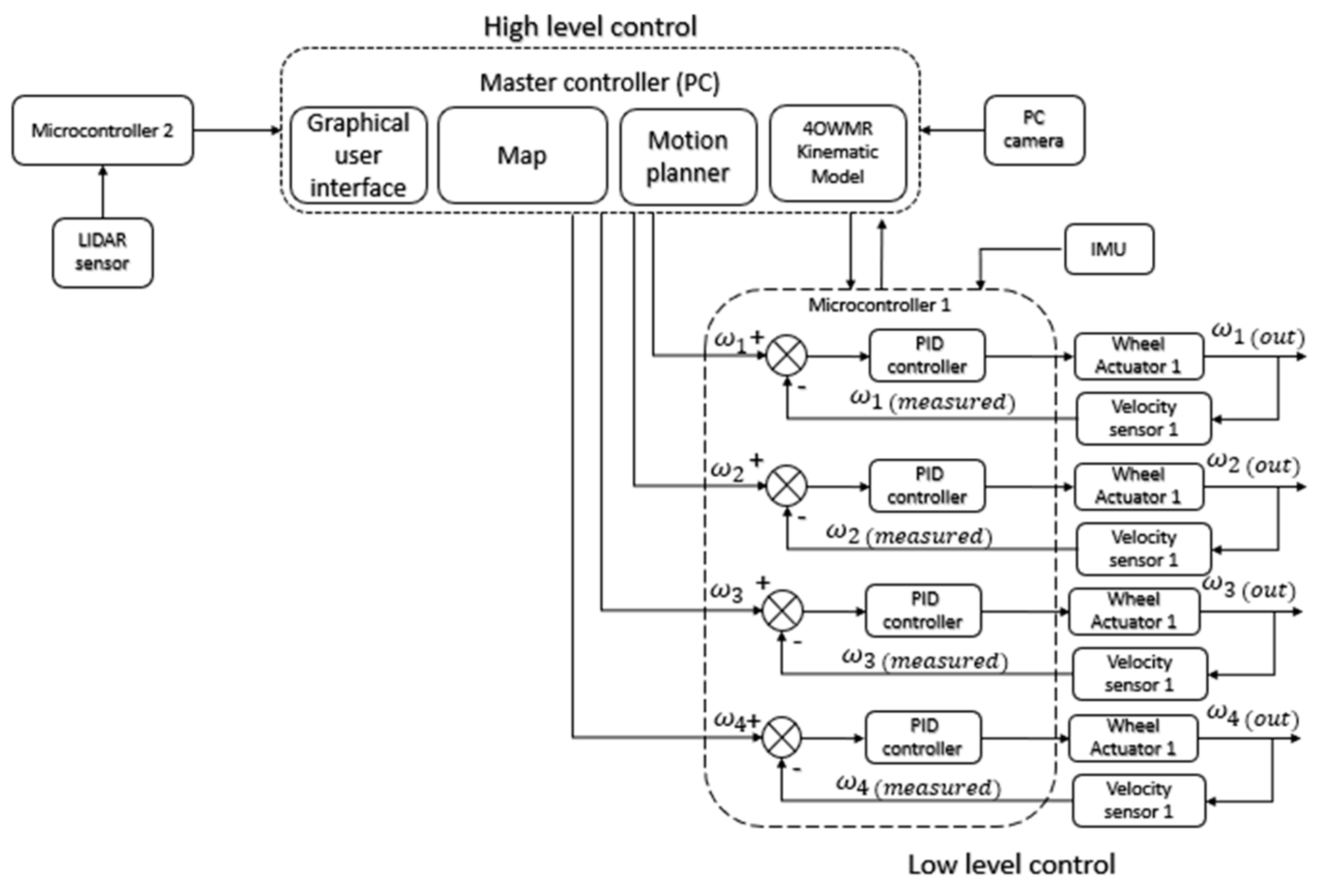
3. Control System of the 4OWMR
3.1. Low-Level Control
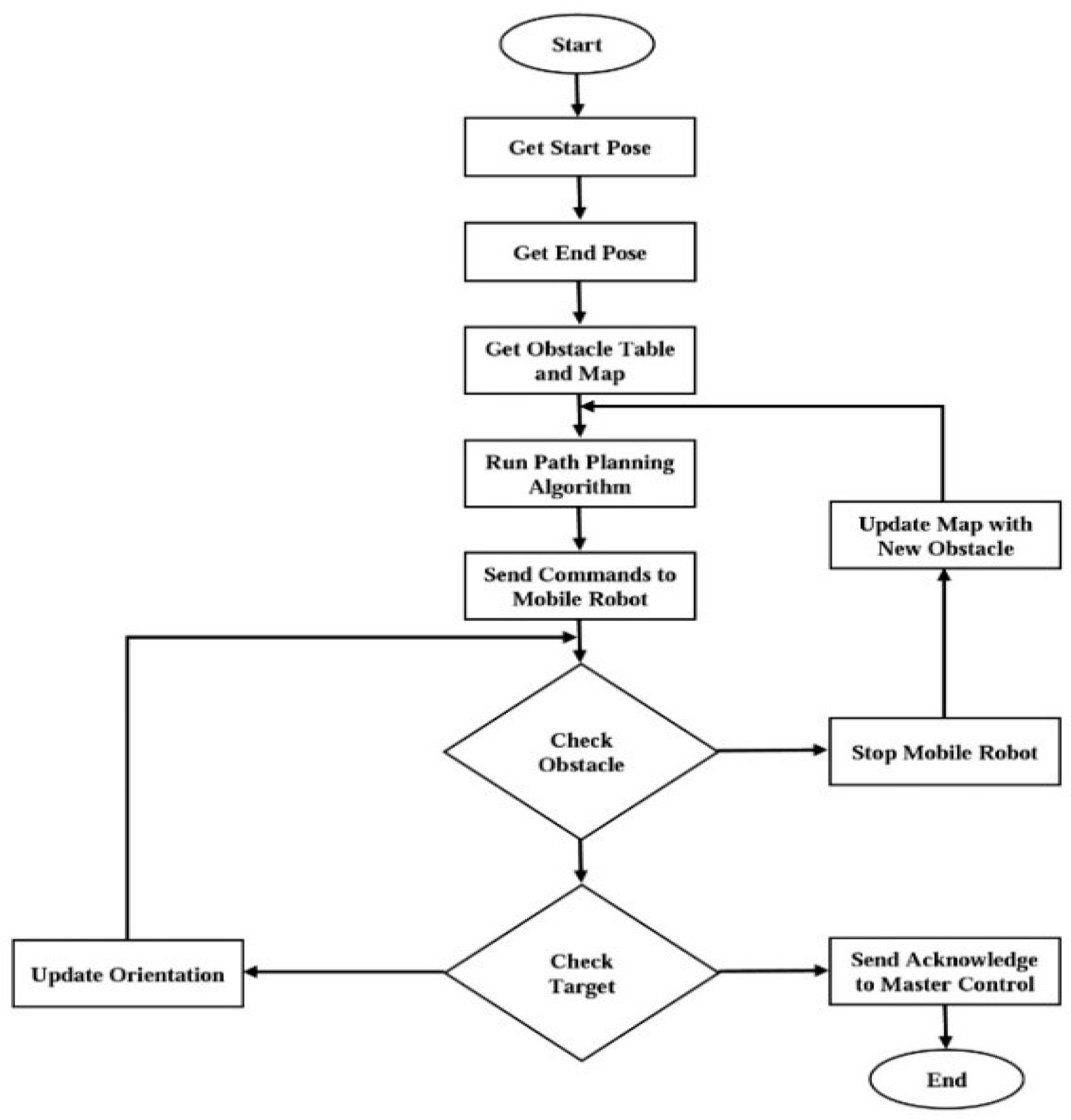
3.2. High-Level Control
4. Proposed Path Planning Techniques
4.1. Probabilistic Roadmaps (PRM) Algorithm
- Preprocessing Phase: In this phase, a graph (road map) noted (G) is generated. It is accessible from every point of the free configuration space ;
- Query Phase: The two points (start point) and (final point) are given. The sequence of edges that forms the required path is obtained from to .
| Input: Number n of samples, number k of nearest neighbors Output: PRM G = (V, E) |
|
4.2. RRT (Rapidly exploring Random Tree) and RRT* Algorithms
| Input: n of nodes, step size Output: Tree T = (V, E) initialize V = {}, E = ∅ |
|
4.3. Hybrid A* Algorithm
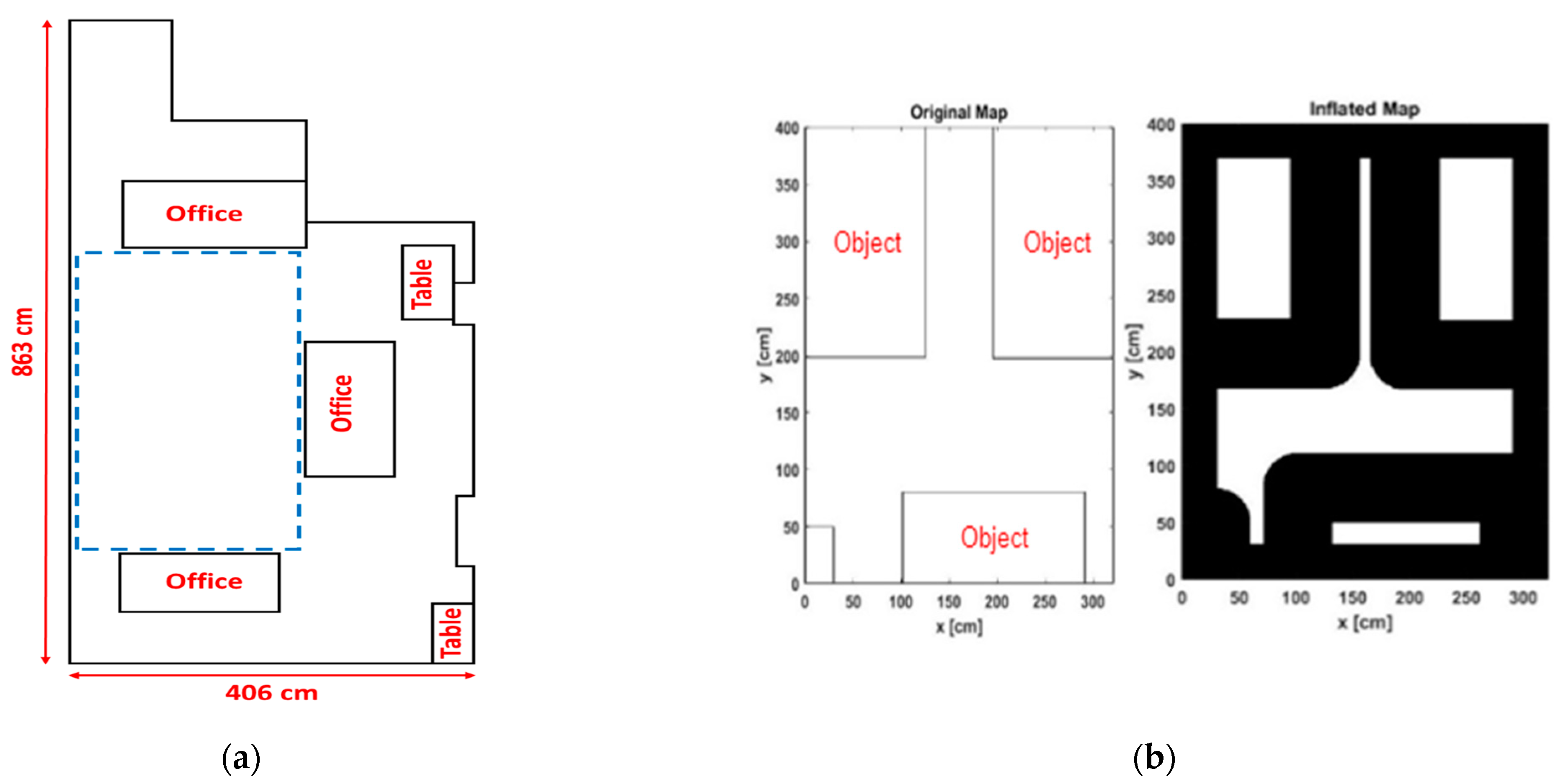
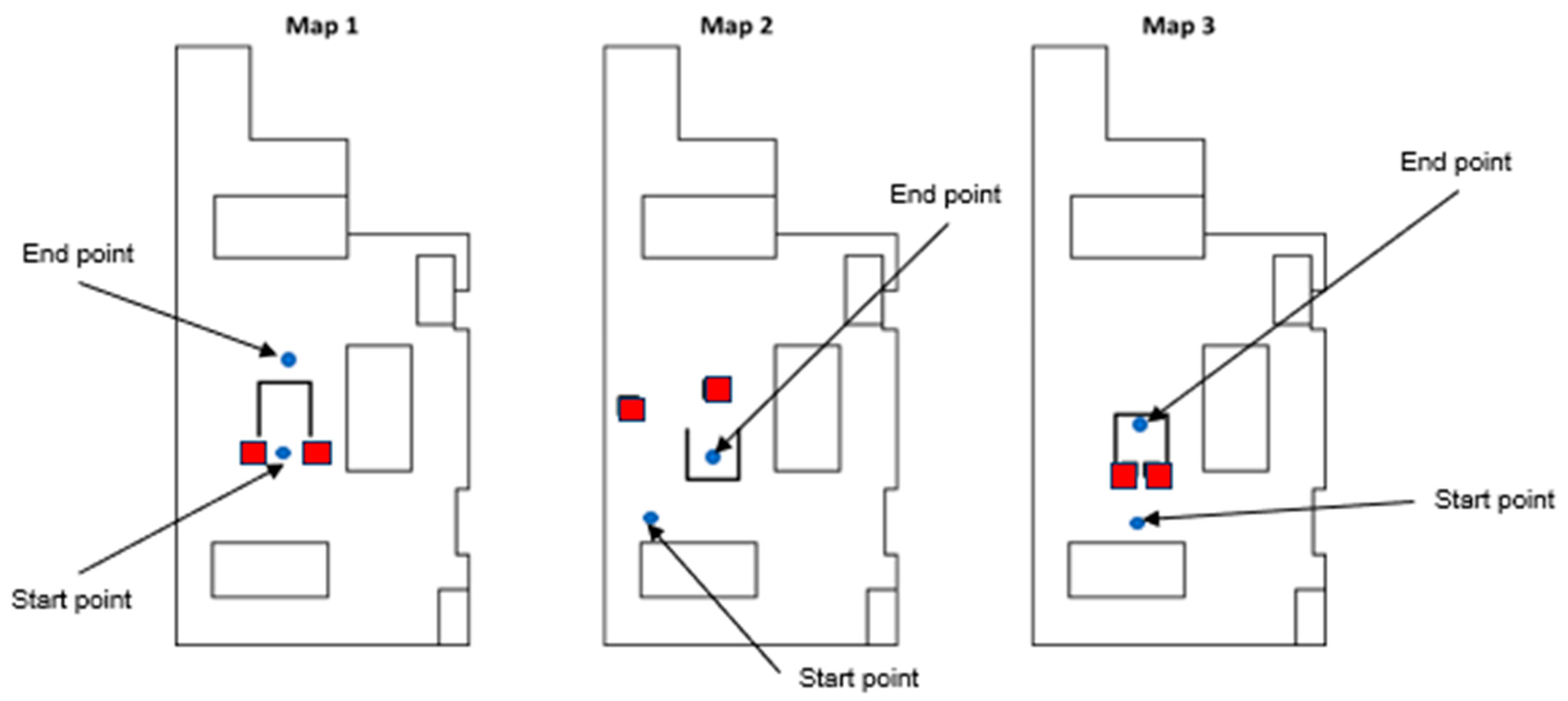
5. Experimental Implementation and Results
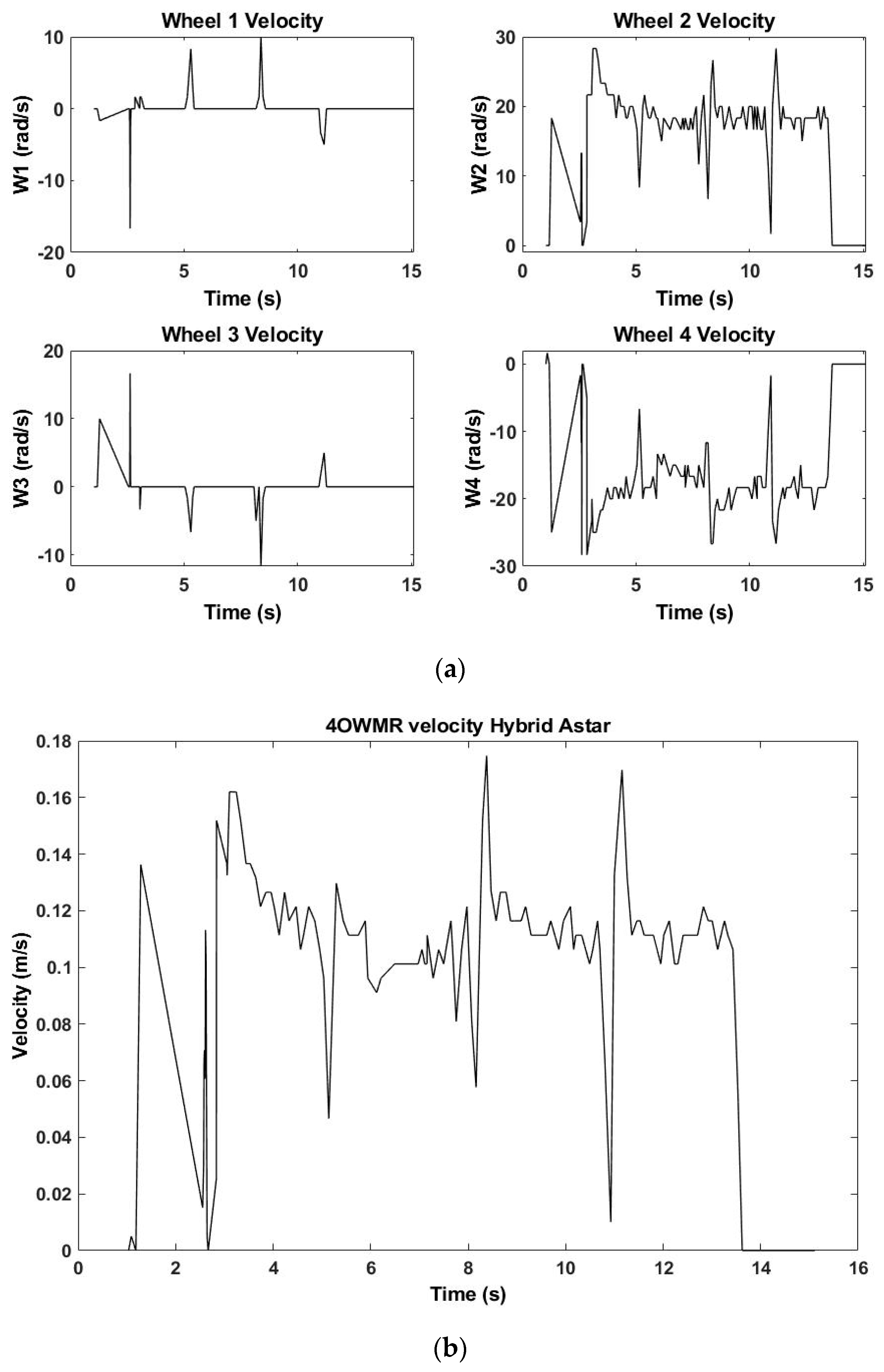
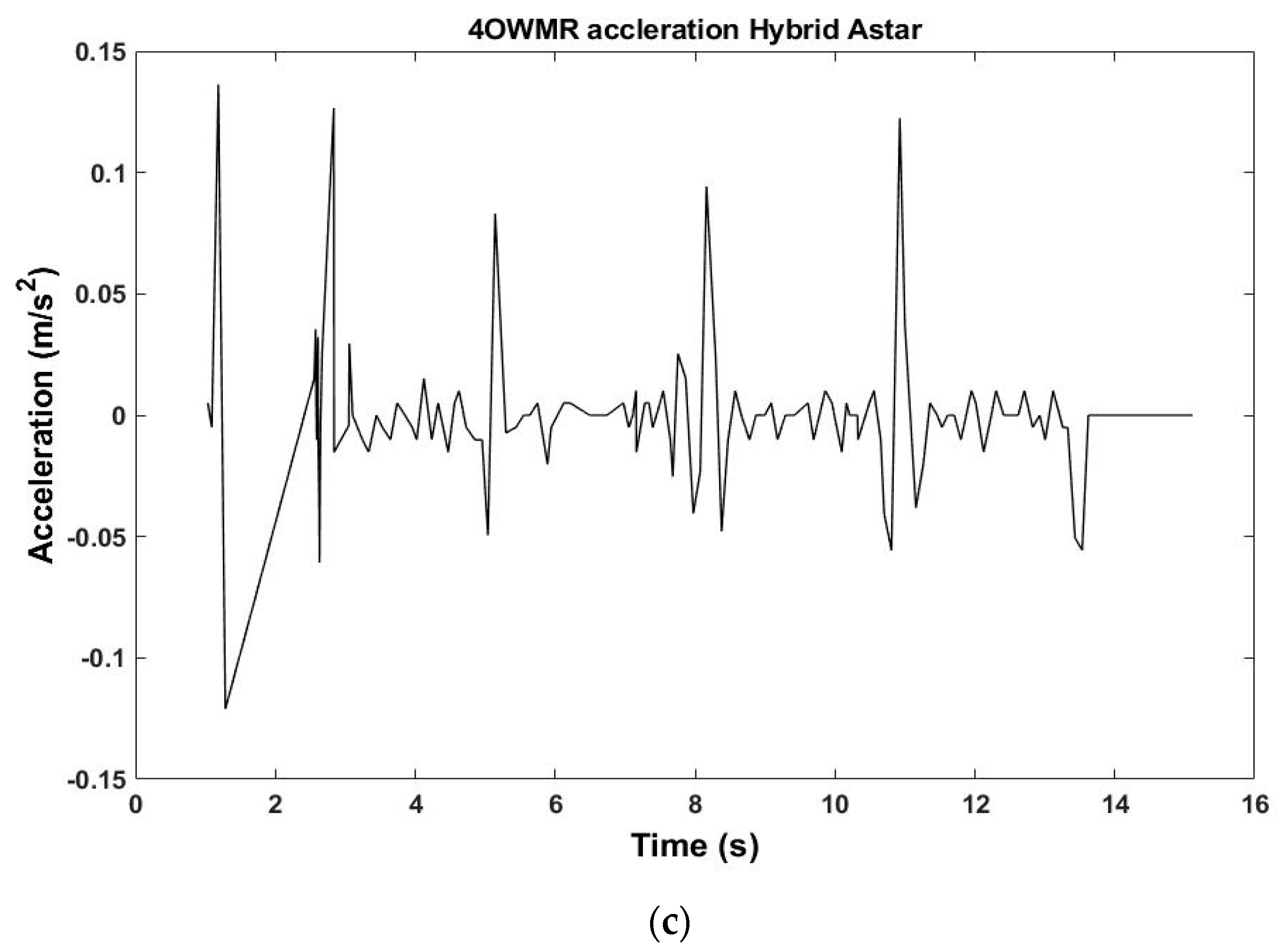
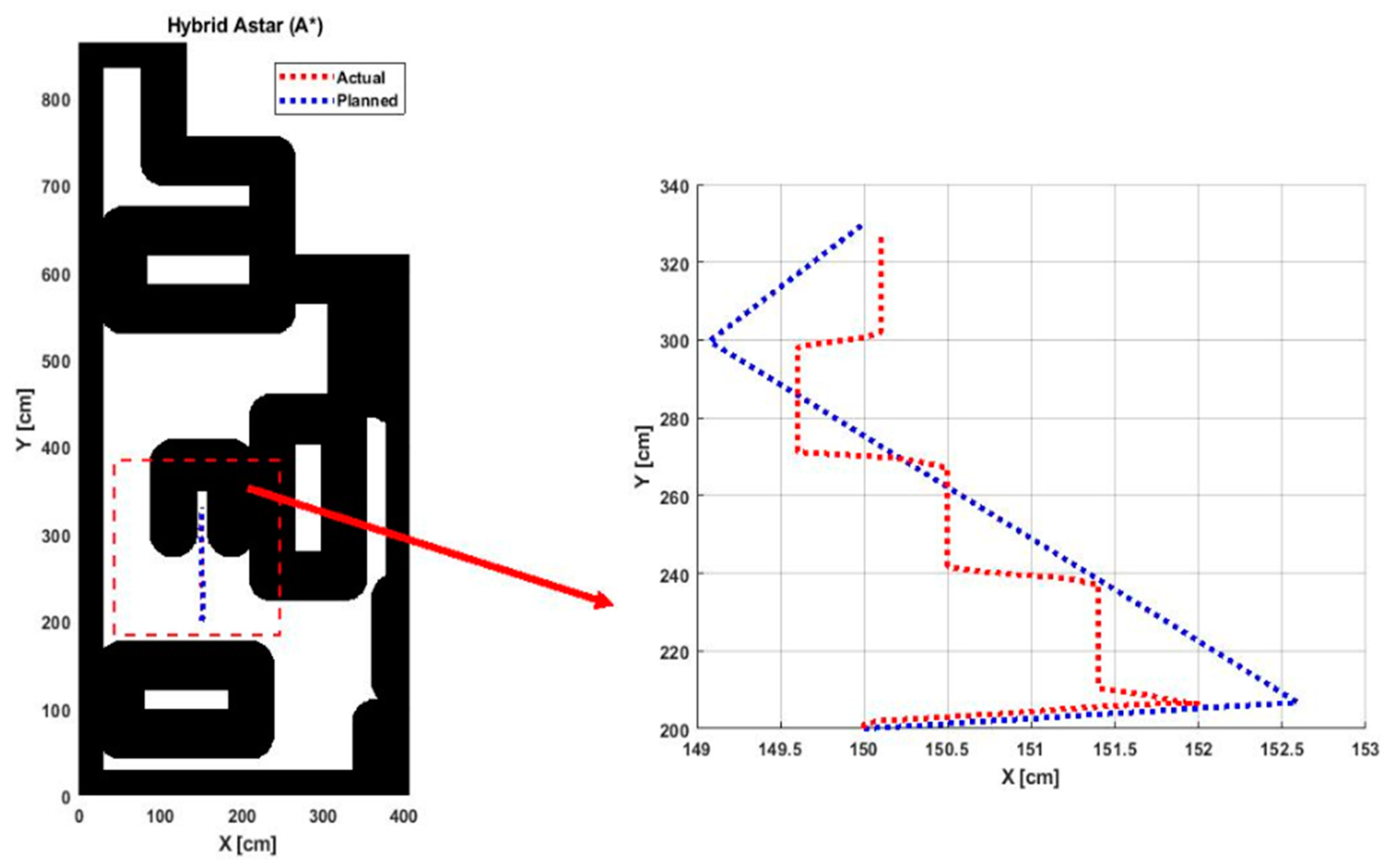
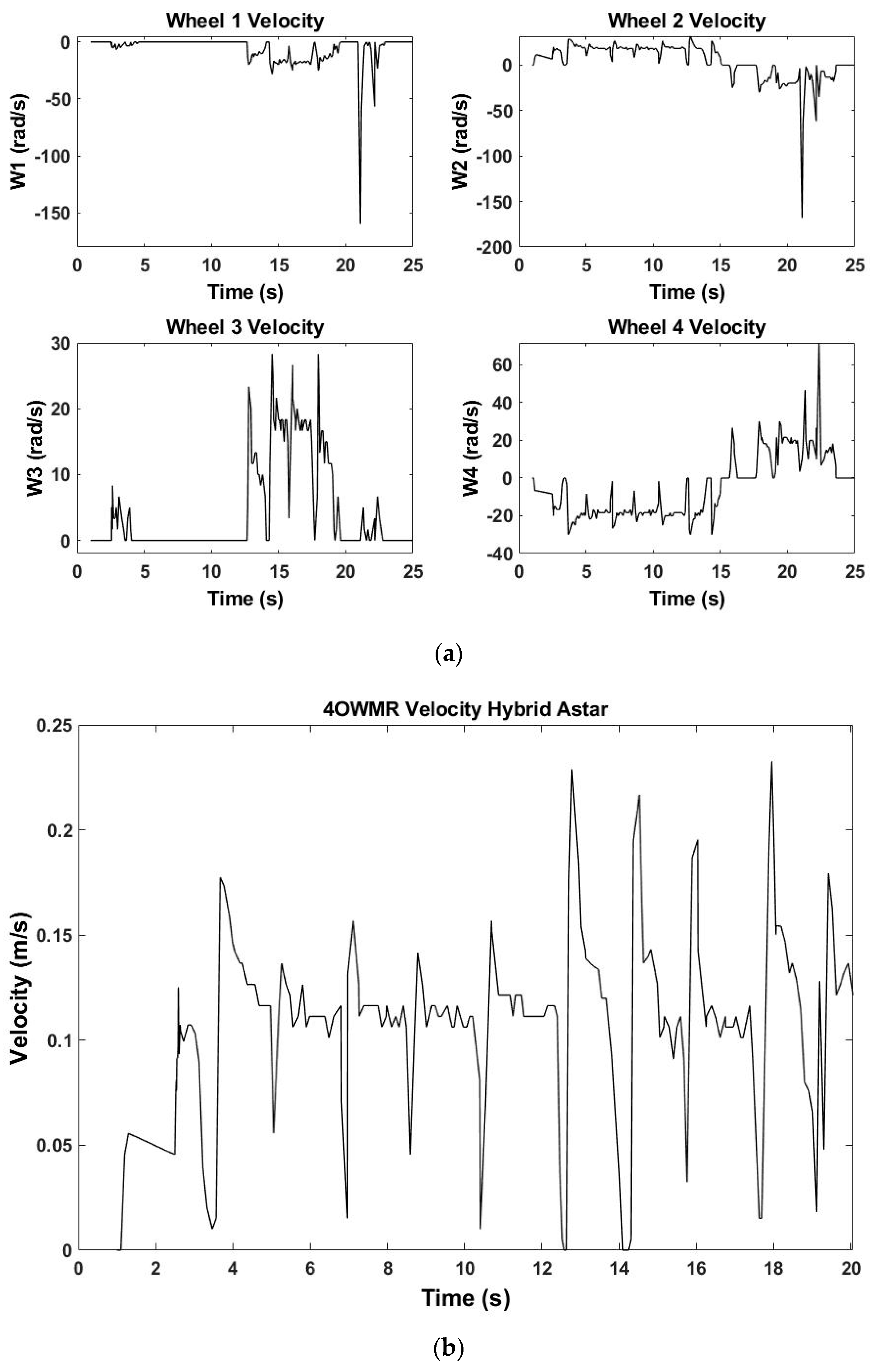
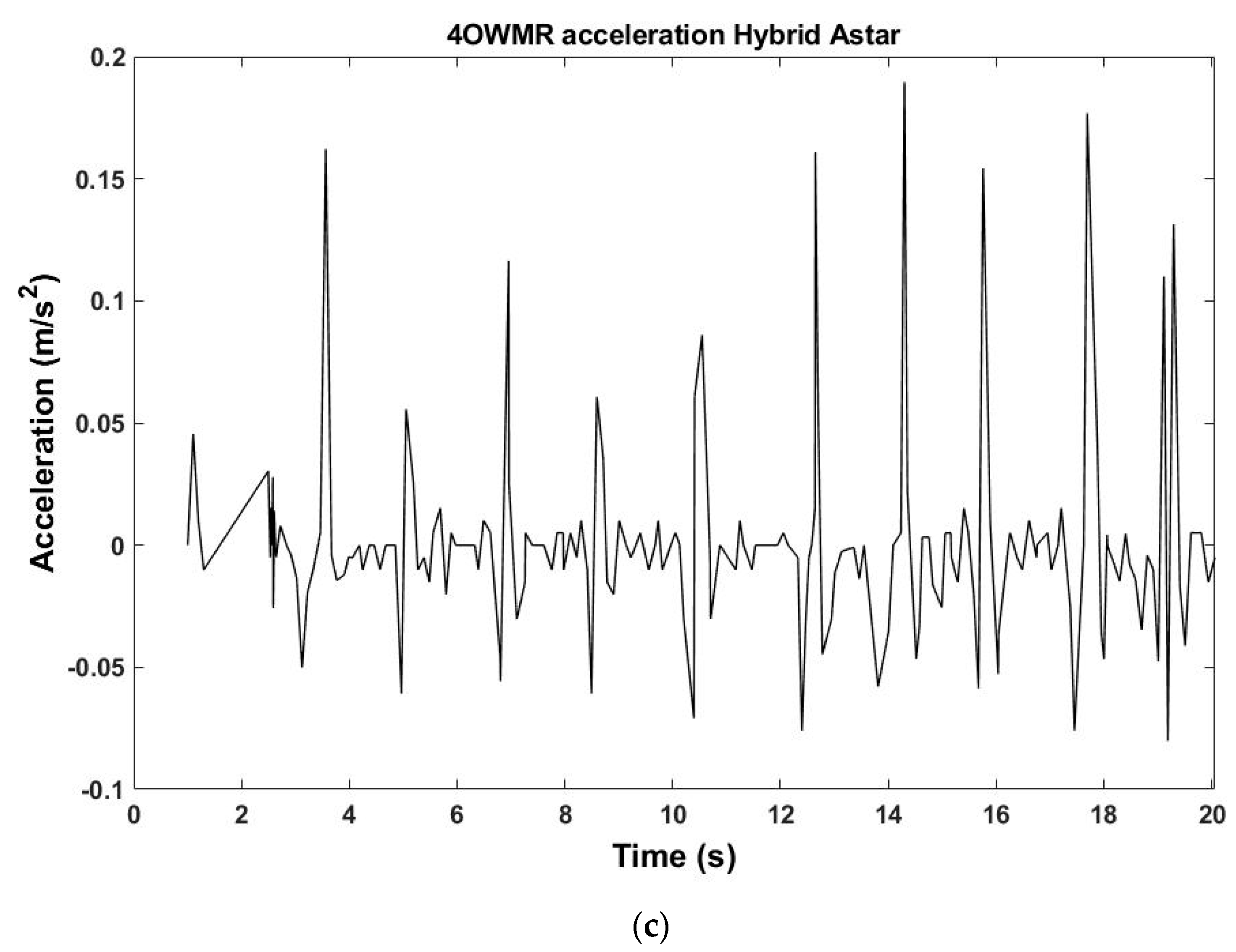
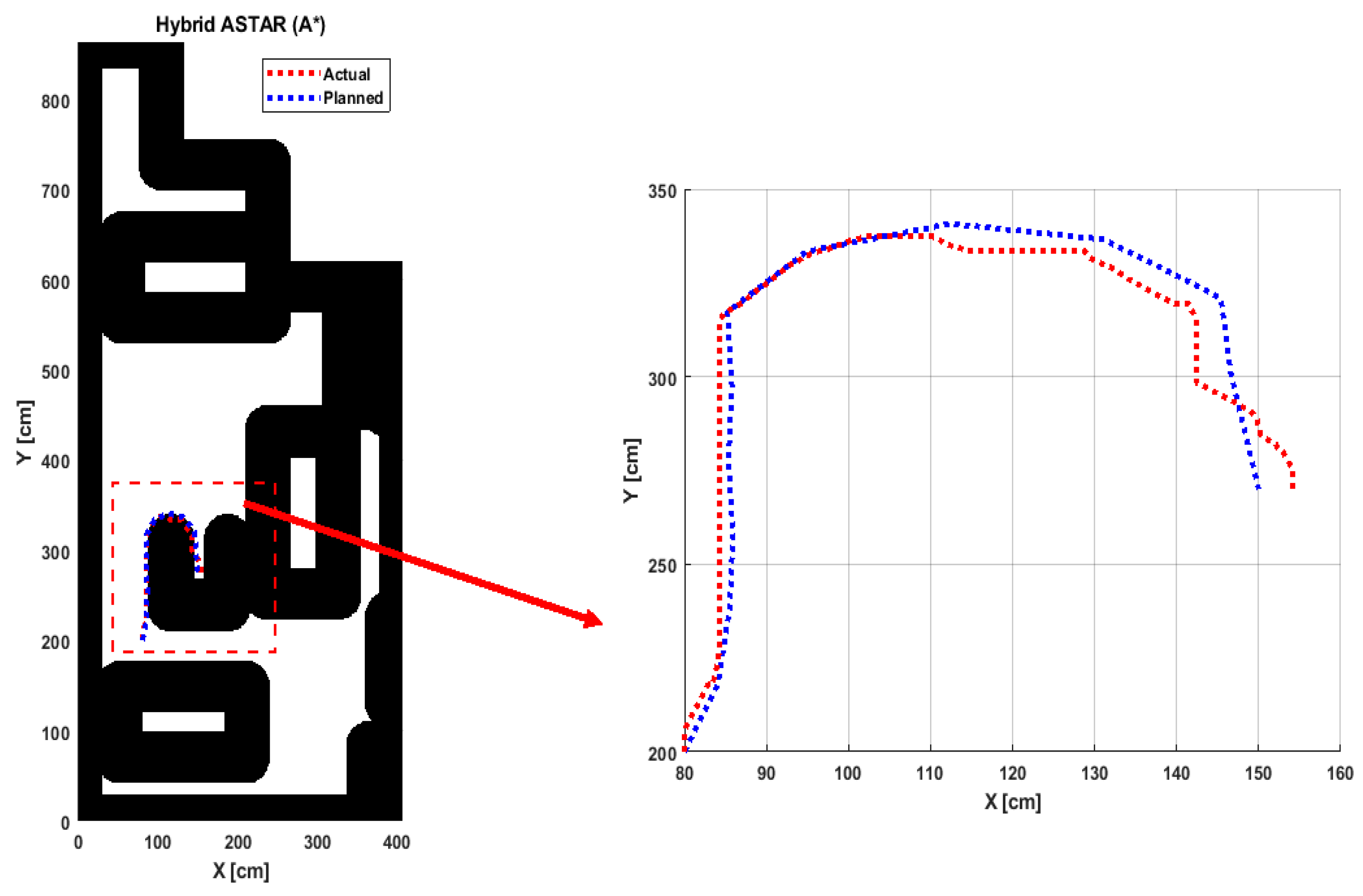
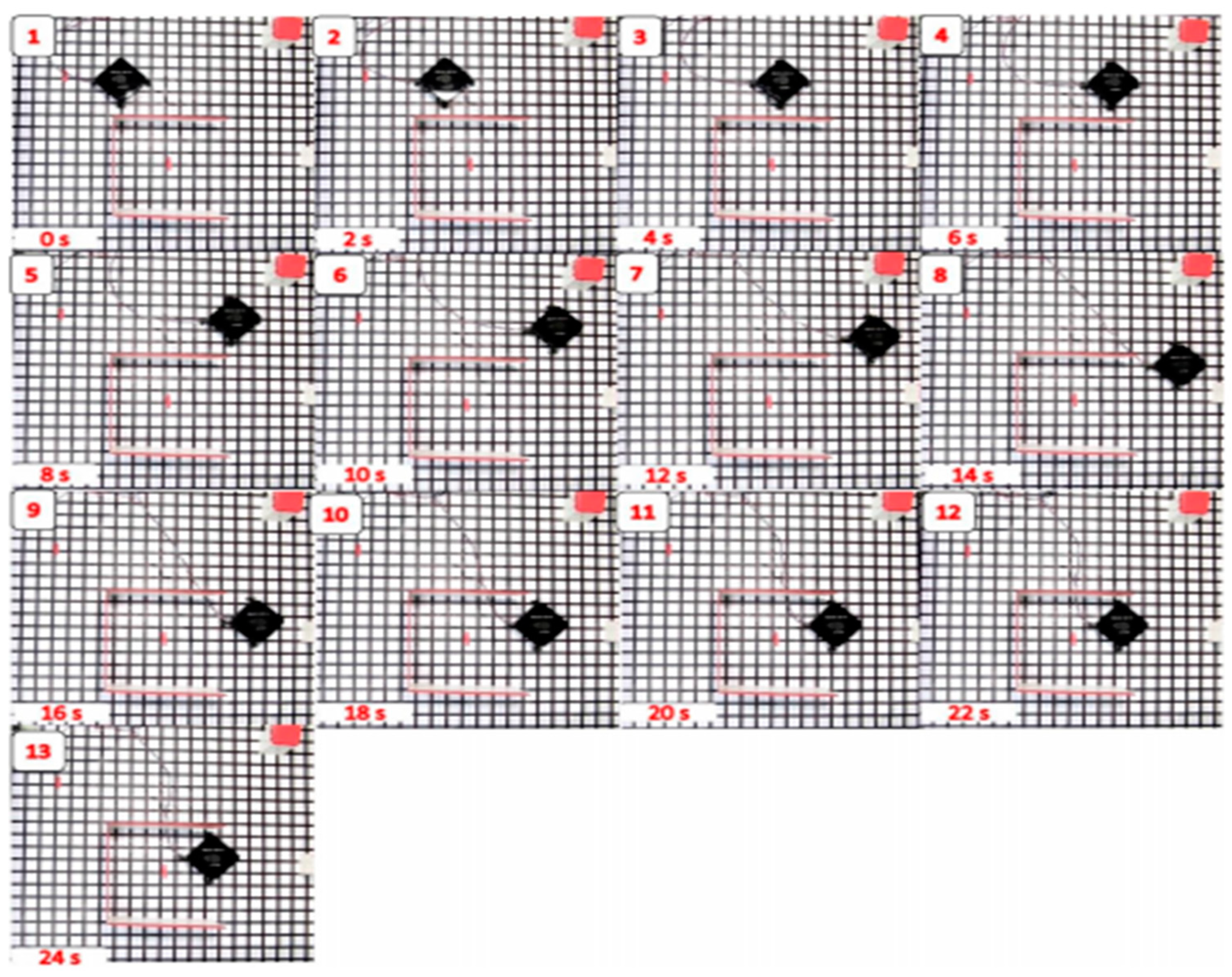
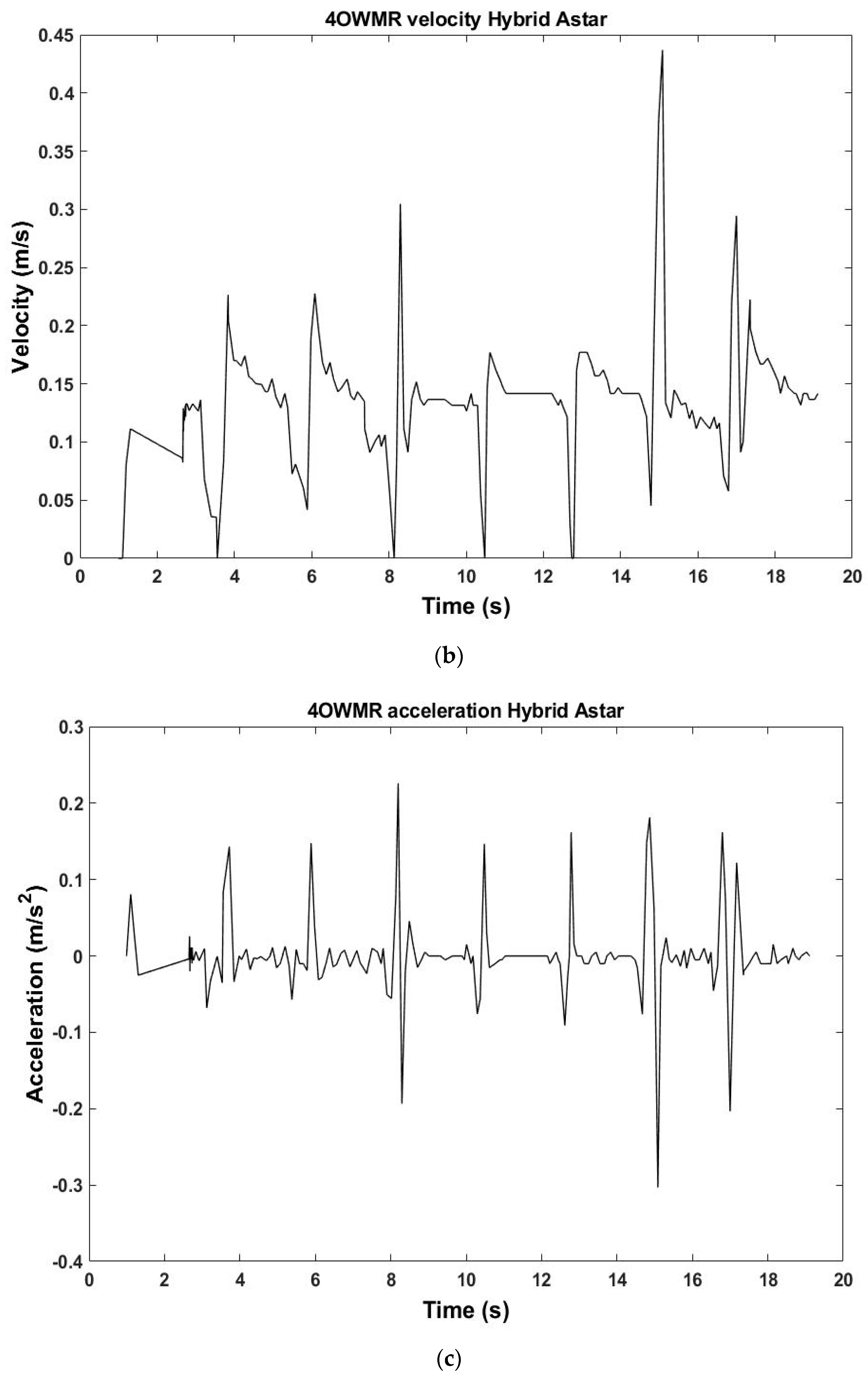
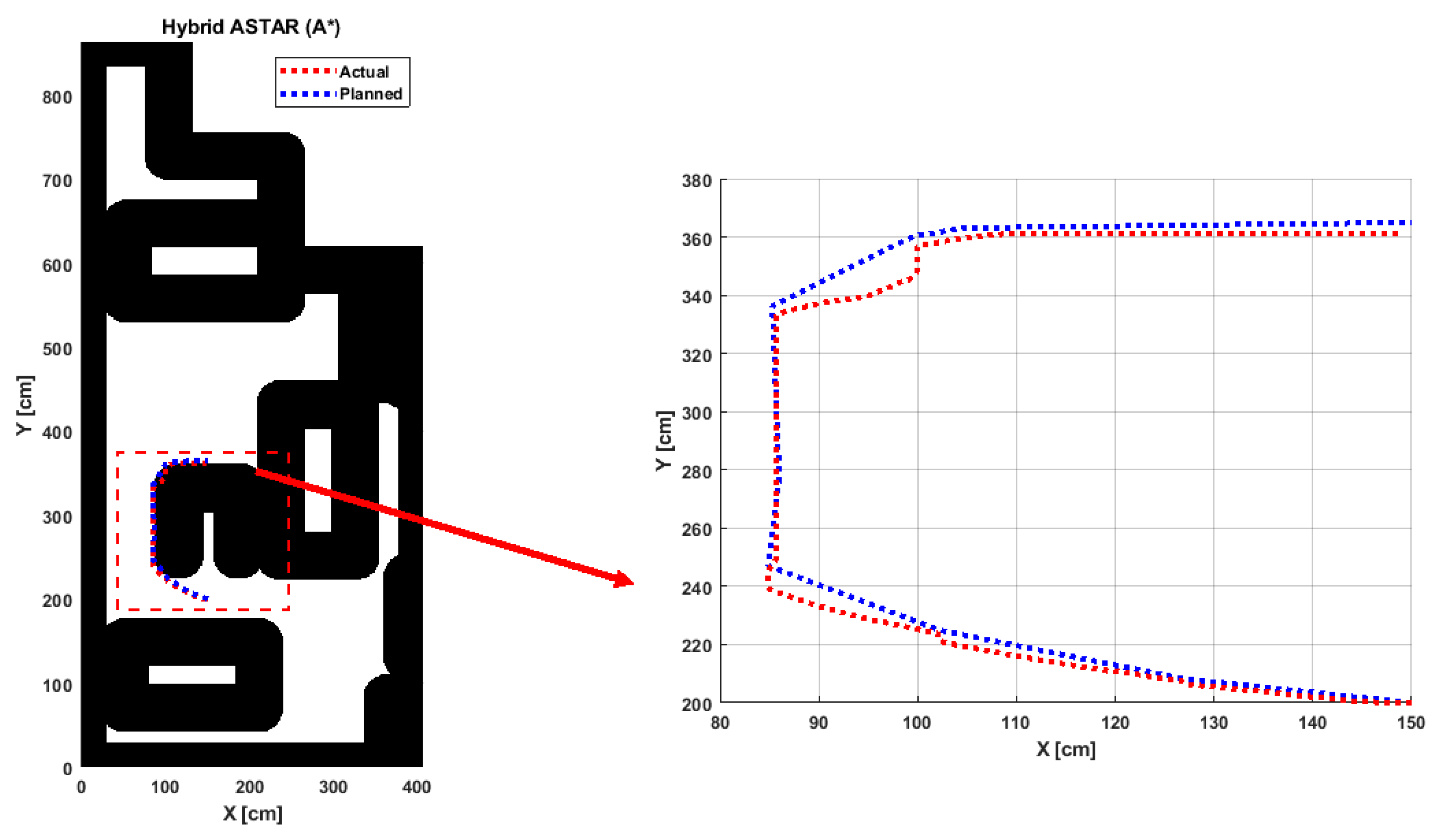
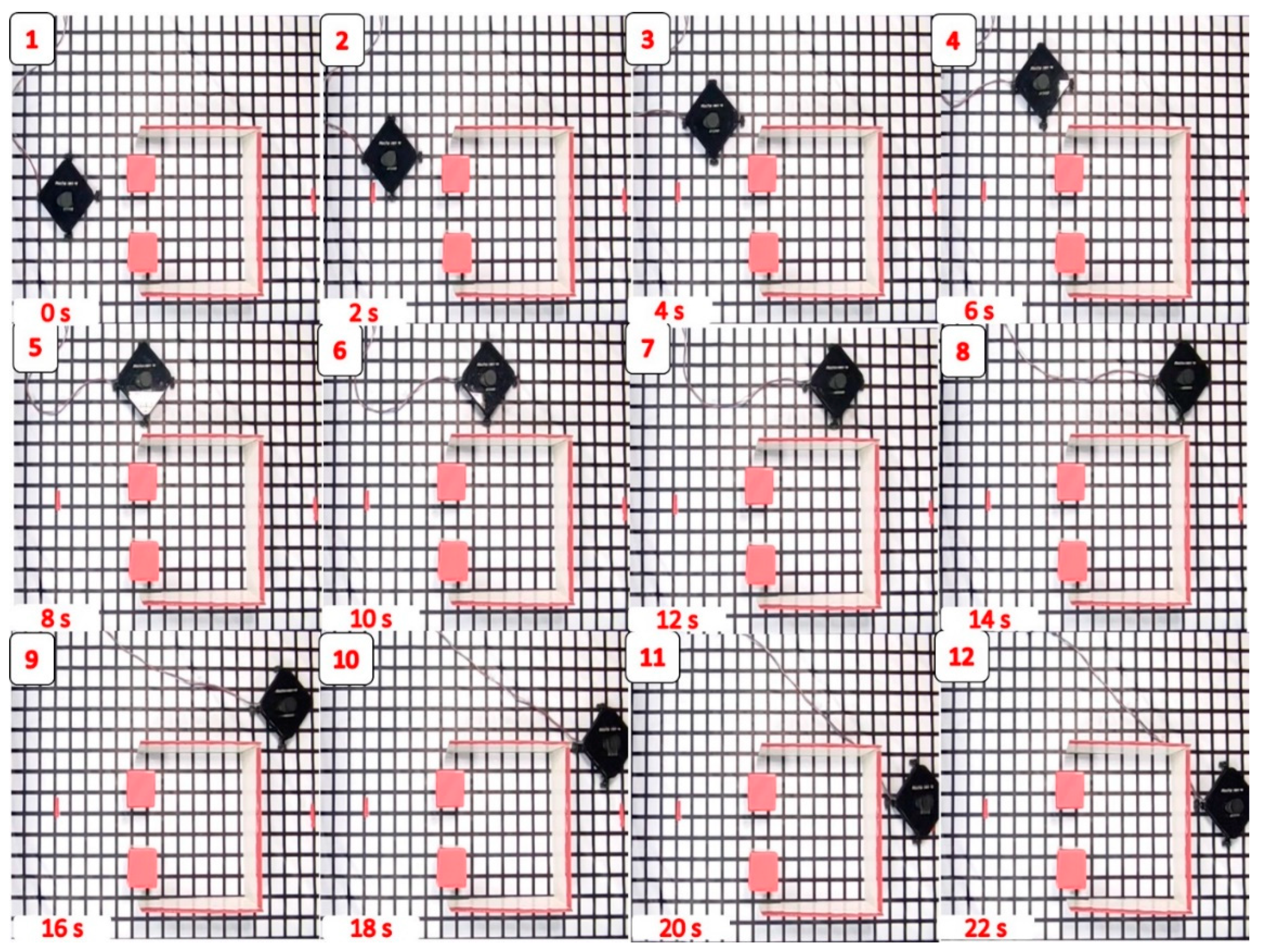
5.1. Experimental Hybrid A* Results for Map1
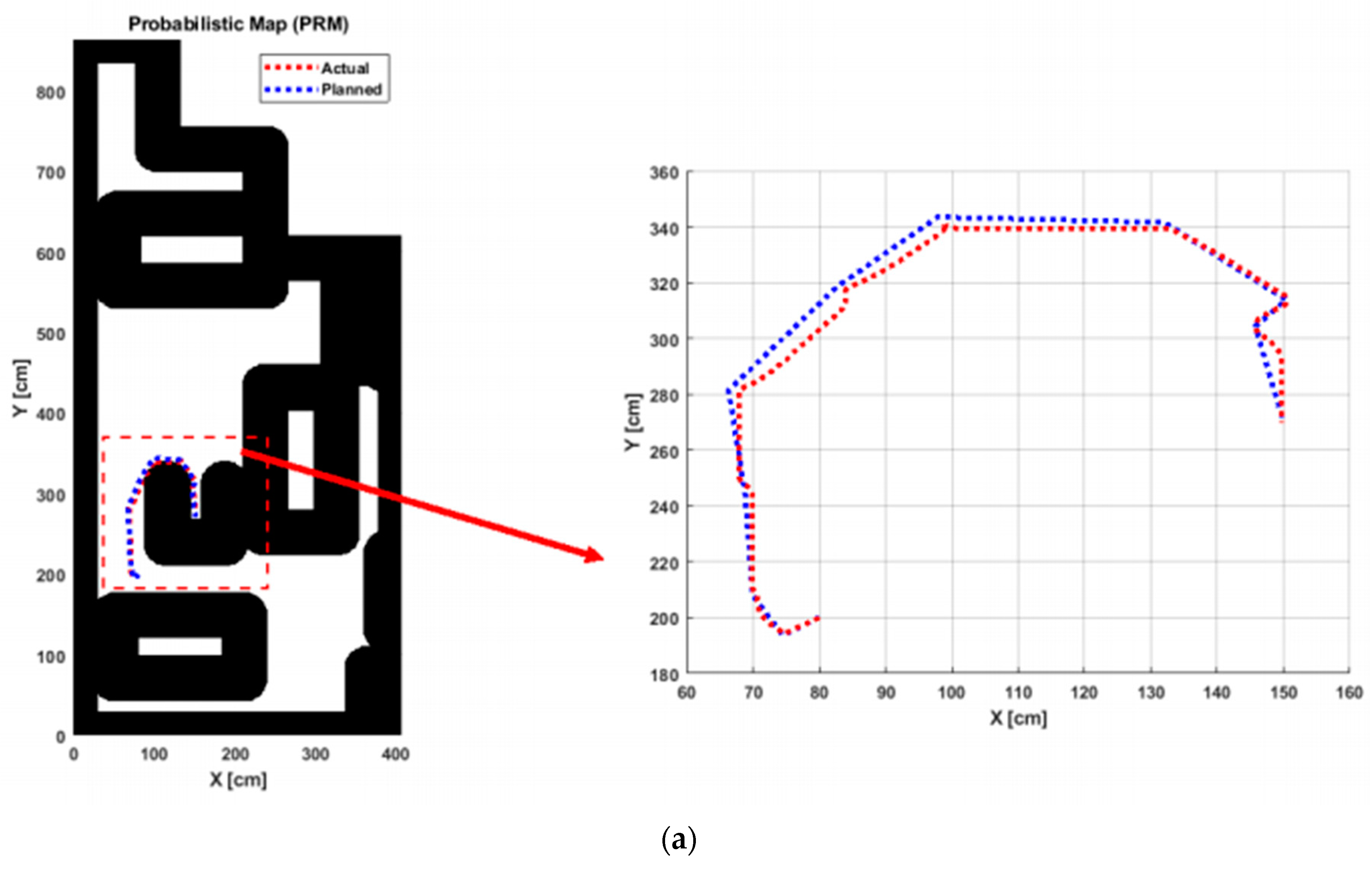
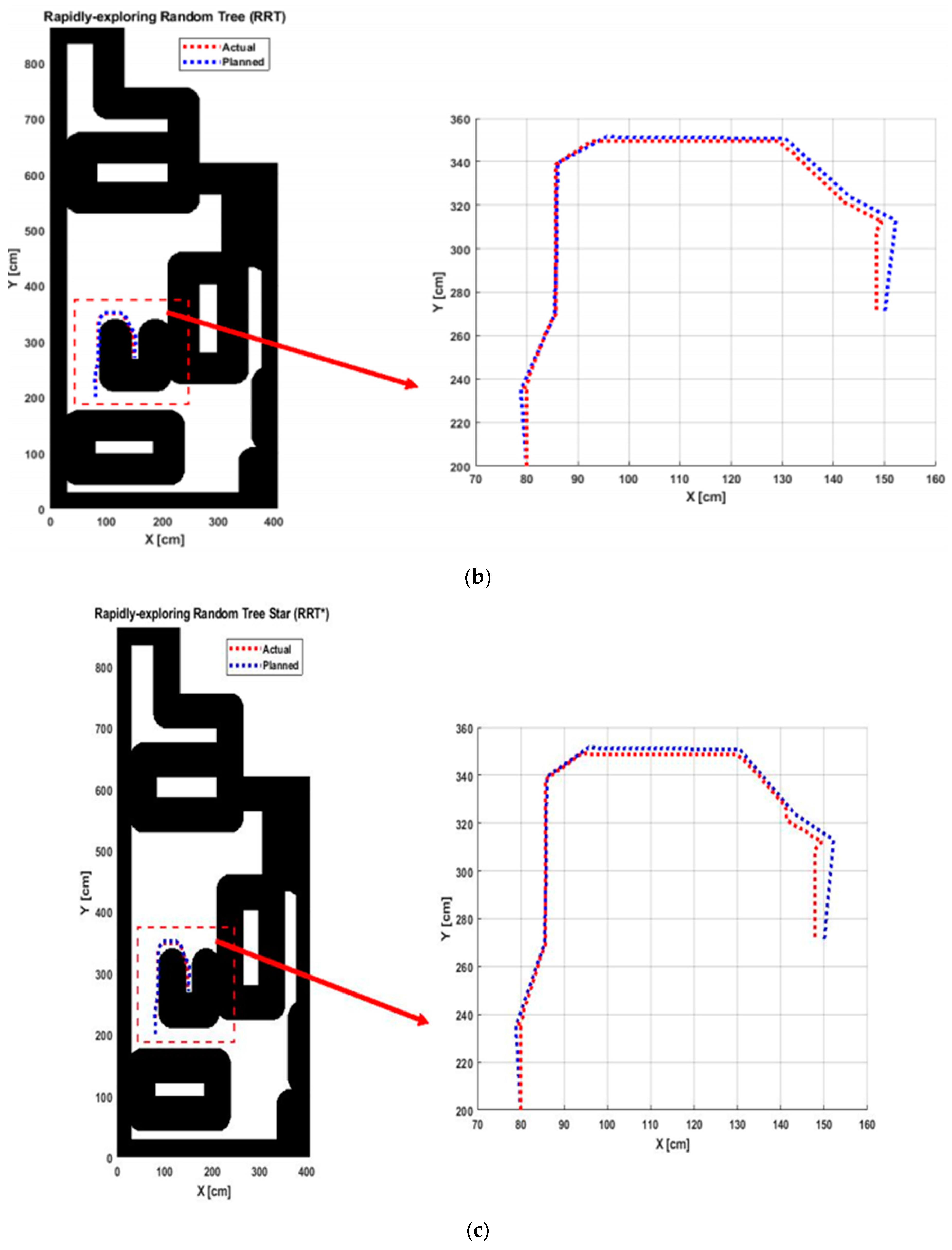
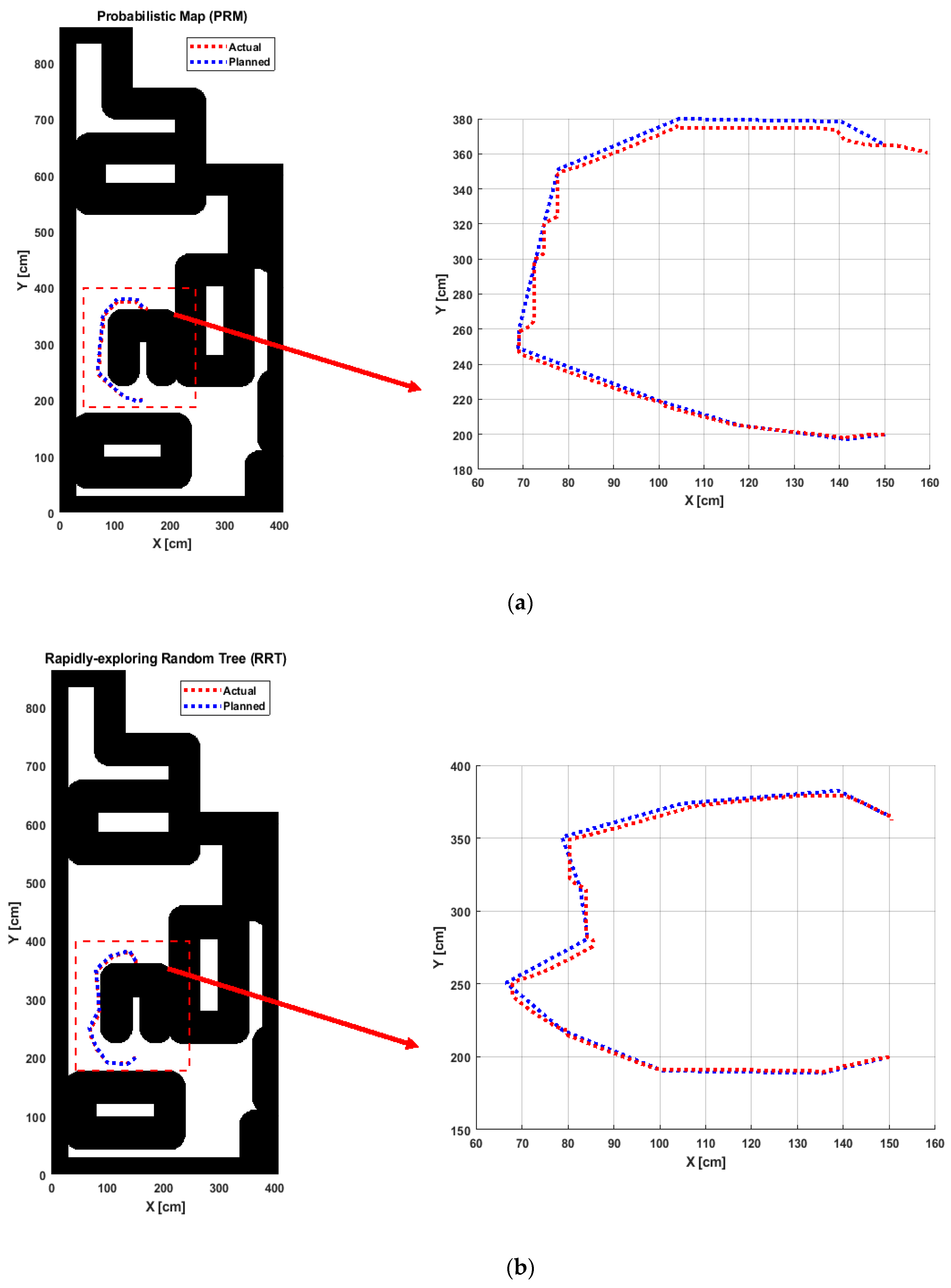
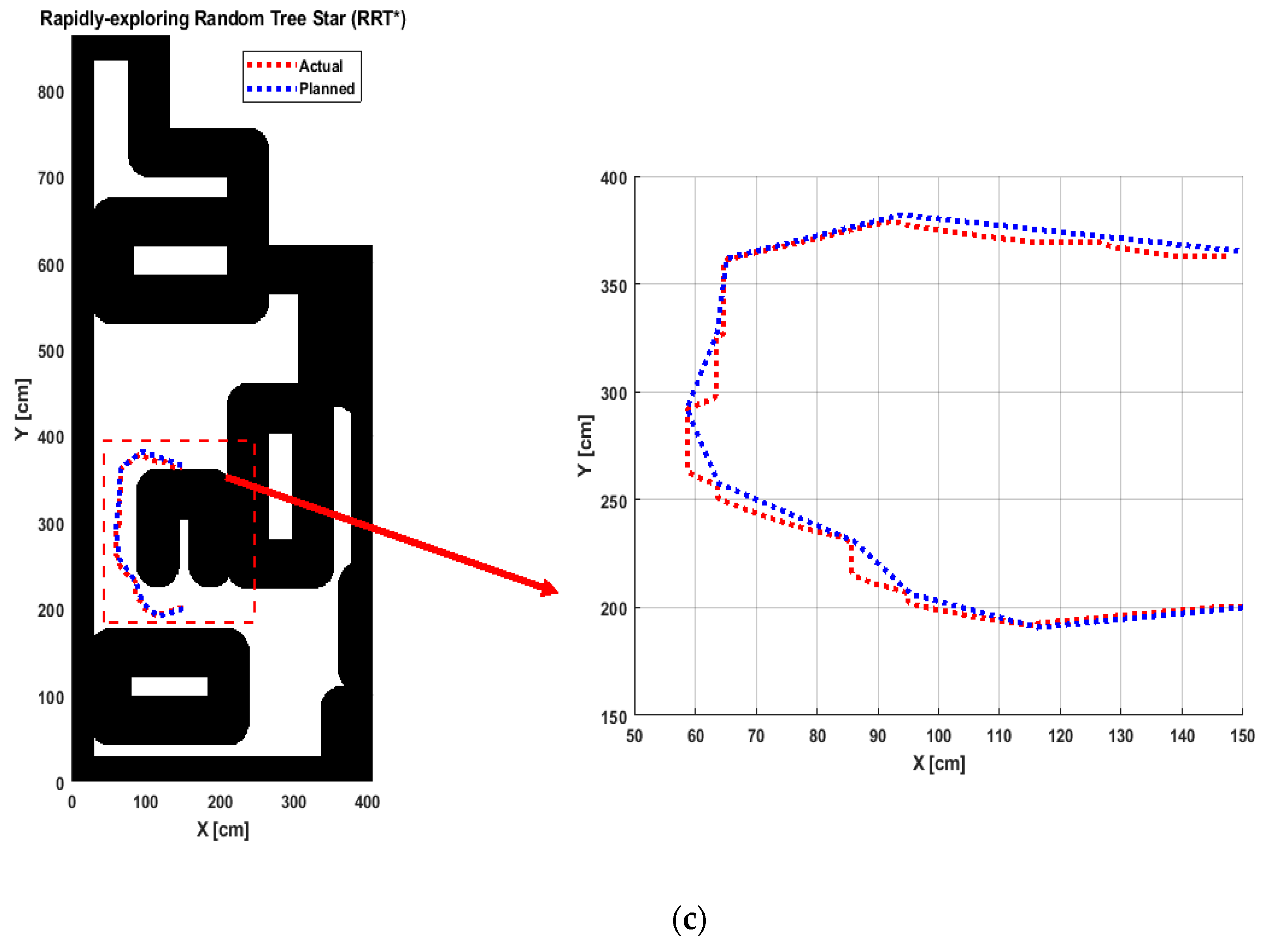
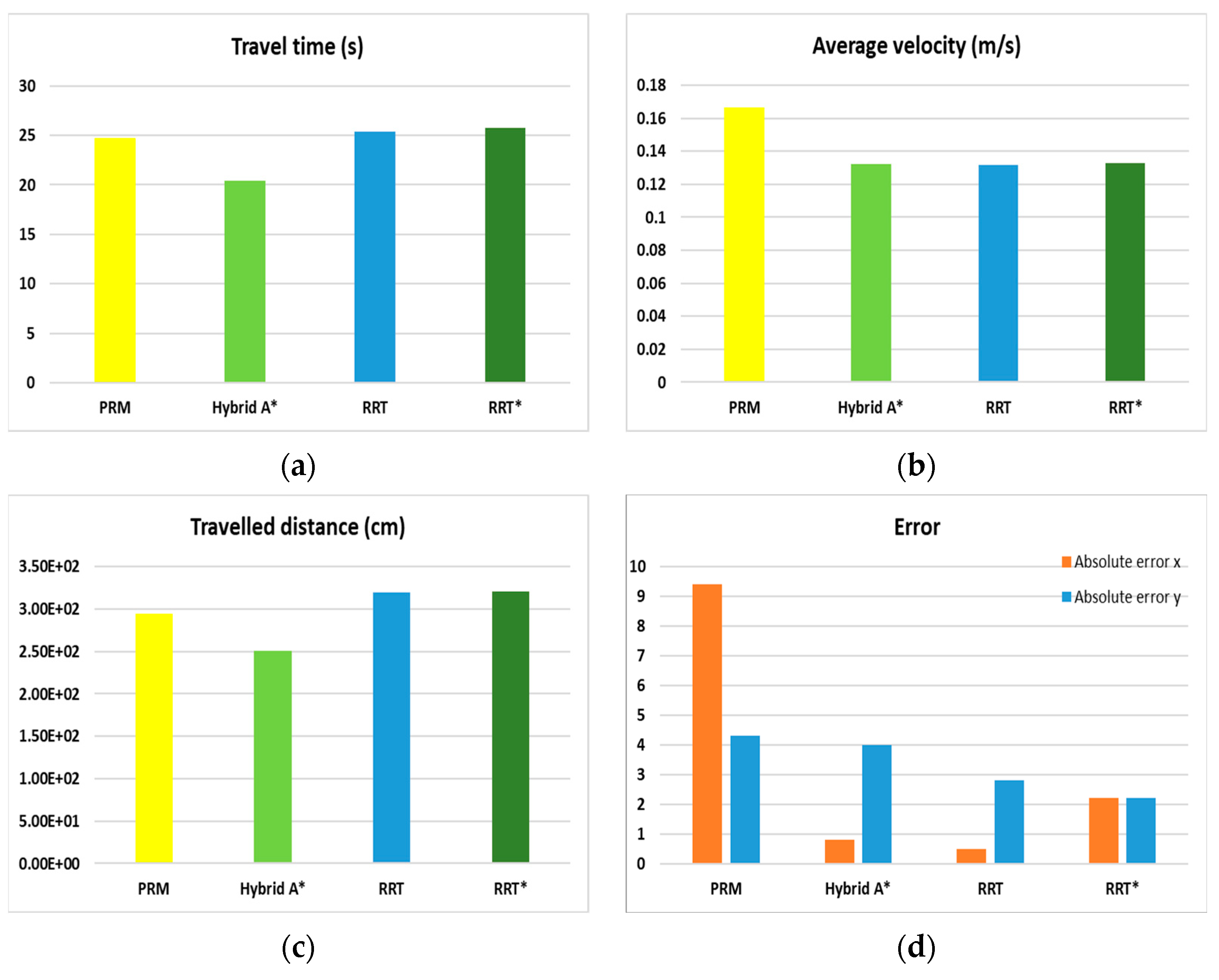
5.2. Experimental PRM, RRT and RRT* Results for Map1
5.3. Experimental Hybrid A* Results for Map2
5.4. Experimental PRM, RRT and RRT* Results for Map2
5.5. Experimental Hybrid A* Results for Map3
5.6. Experimental PRM, RRT and RRT* Results for Map3
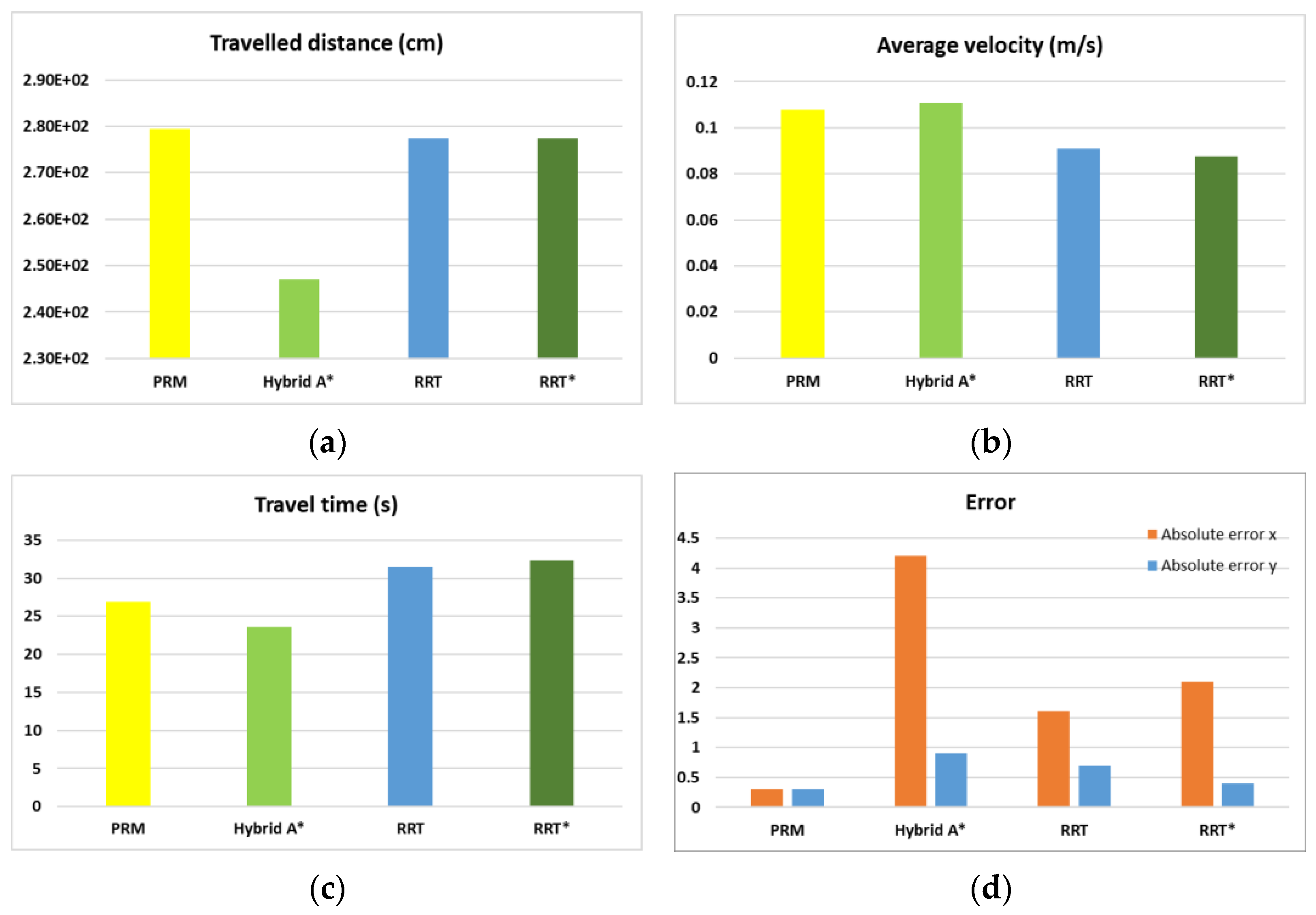
6. Discussion
7. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Rubio, F.; Valero, F.; Llopis-Albert, C. A review of mobile robots: Concepts, methods, theoretical framework, and applications. Int. J. Adv. Robot. Syst. 2019, 16, 1–22. [Google Scholar] [CrossRef] [Green Version]
- Crnokic, B.; Grubisic, M.; Volaric, T. Different Applications of Mobile Robots in Education. Int. J. Integr. Technol. Educ. 2017, 6, 15–28. [Google Scholar] [CrossRef]
- Siegwart, R.; Nourbakhsh, I.R.; Scaramuzza, D. Introduction to Autonomous Mobile Robots; The MIT Press: Cambridge, MA, USA, 2011; pp. 11–46, ISBN-10: 0262015358. [Google Scholar]
- Kanjanawanishkul, K. Omnidirectional wheeled mobile robots: Wheel types and practical applications. Int. J. Adv. Mechatron. Syst. 2015, 6, 289–302. [Google Scholar] [CrossRef]
- Shabalina, K.; Sagitov, A.; Magid, E. Comparative Analysis of Mobile Robot Wheels Design. Proc. Int. Conf. Dev. eSystems Eng. DeSE 2019, 2018, 175–179. [Google Scholar] [CrossRef]
- Parmar, J.J.; Savant, C.V. Selection of Wheels in Robotics. Int. J. Sci. Eng. Res. 2014, 5, 339–343. [Google Scholar]
- Oliveira, H.P.; Sousa, A.J.; Moreira, A.P.; Costa, P.J. Dynamical models for omni-directional robots with 3 and 4 wheels. In Proceedings of the ICINCO 2008—5th International Conference on Informatics in Control, Automation and Robotics, Milan, Italy, 2–5 July 2009; Volume 1, pp. 189–196. [Google Scholar]
- Röhrig, C.; Heß, D. Omniman: An omnidirectional mobile manipulator for human-robot collaboration. In Proceedings of the International MultiConference of Engineers and Computer Scientists 2019, Hong Kong, China, 13–15 March 2019; Volume 2239, pp. 55–60. [Google Scholar]
- Zhang, Y.; Guo, L.; Zhang, M.; Lv, X. Structure Design and Kinematics Analysis of Omni-Directional Mobile Platform. In Proceedings of the 2018 IEEE 8th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER), Tianjin, China, 19–23 July 2018; pp. 1062–1067. [Google Scholar] [CrossRef]
- Takahashi, M.; Suzuki, T.; Shitamoto, H.; Moriguchi, T.; Yoshida, K. Developing a mobile robot for transport applications in the hospital domain. Robot. Auton. Syst. 2010, 58, 889–899. [Google Scholar] [CrossRef]
- Sofwan, A.; Mulyana, H.R.; Afrisal, H.; Goni, A. Development of Omni-Wheeled Mobile Robot Based-on Inverse Kinematics and Odometry. In Proceedings of the Information Technology, Computer and Electrical Engineering. International Conference, 6th 2019 (ICITACEE 2019), Semarang, Indonesia, 26–27 September 2019; pp. 143–148. [Google Scholar] [CrossRef] [Green Version]
- Riaz, Z.; Pervez, A.; Ahmer, M.; Iqbal, J. A fully autonomous indoor mobile robot using SLAM. In Proceedings of the 2010 International Conference on Information and Emerging Technologies (ICIET 2010), Karachi, Pakistan, 14–16 June 2010; pp. 1–6. [Google Scholar] [CrossRef]
- Patle, B.; Pandey, A.; Parhi, D.; Jagadeesh, A. A review: On path planning strategies for navigation of mobile robot. Def. Technol. 2019, 15, 582–606. [Google Scholar] [CrossRef]
- Chatterjee, A.; Rakshit, A.; Singh, N.N. Simultaneous Localization and Mapping (SLAM) in Mobile Robots. In Vision Based Autonomous Robot Navigation. Studies in Computational Intelligence; Springer: Berlin/Heidelberg, Germany, 2013; Volume 455. [Google Scholar] [CrossRef]
- Ullah, I.; Su, X.; Zhang, X.; Choi, D. Simultaneous Localization and Mapping Based on Kalman Filter and Extended Kalman Filter. Wirel. Commun. Mob. Comput. 2020, 2020, 2138643. [Google Scholar] [CrossRef]
- Al Khatib, E.I.; Jaradat, M.A.K.; Abdel-Hafez, M.F. Low-Cost Reduced Navigation System for Mobile Robot in Indoor/Outdoor Environments. IEEE Access 2020, 8, 25014–25026. [Google Scholar] [CrossRef]
- Qian, J.; Zi, B.; Wang, D.; Ma, Y.; Zhang, D. The Design and Development of an Omni-Directional Mobile Robot Oriented to an Intelligent Manufacturing System. Sensors 2017, 17, 2073. [Google Scholar] [CrossRef] [Green Version]
- Carius, J.; Wermelinger, M.; Rajasekaran, B.; Holtmann, K.; Hutter, M. Autonomous Mission with a Mobile Manipulator—A Solution to the MBZIRC. In Field and Service Robotics; Hutter, M., Siegwart, R., Eds.; Springer Proceedings in Advanced Robotics; Springer: Cham, Switzerland, 2018; Volume 5, pp. 559–573. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Sun, Y. Mobile robot instant indoor map building and localization using 2D laser scanning data. In Proceedings of the 2012 International Conference on System Science and Engineering (ICSSE 2012), Dalian, China, 30 June–2 July 2012; pp. 339–344. [Google Scholar]
- Zhao, J.; Liu, S.; Li, J. Research and Implementation of Autonomous Navigation for Mobile Robots Based on SLAM Algorithm under ROS. Sensors 2022, 22, 4172. [Google Scholar] [CrossRef] [PubMed]
- Ge, G.; Zhang, Y.; Wang, W.; Jiang, Q.; Hu, L.; Wang, Y. Text-MCL: Autonomous Mobile Robot Localization in Similar Environment Using Text-Level Semantic Information. Machines 2022, 10, 169. [Google Scholar] [CrossRef]
- Achour, A.; Al-Assaad, H.; Dupuis, Y.; El Zaher, M. Collaborative Mobile Robotics for Semantic Mapping: A Survey. Appl. Sci. 2022, 12, 10316. [Google Scholar] [CrossRef]
- Miao, Y.-Q.; Khamis, A.M.; Karray, F.; Kamel, M.S. A novel approach to path planning for autonomous mobile robots. Control. Intell. Syst. 2011, 39. [Google Scholar] [CrossRef]
- Peralta, F.; Arzamendia, M.; Gregor, D.; Reina, D.; Toral, S. A Comparison of Local Path Planning Techniques of Autonomous Surface Vehicles for Monitoring Applications: The Ypacarai Lake Case-study. Sensors 2020, 20, 1488. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, X.; Chen, H.; Wang, C.; Hu, F.; Yang, X. MPC Control and Path Planning of Omni-Directional Mobile Robot with Potential Field Method. In Proceedings of the 2018 IEEE International Conference on Real-time Computing and Robotics (RCAR), Kandima, Maldives, 1–5 August 2018; pp. 634–638. [Google Scholar] [CrossRef]
- Le, A.V.; Prabakaran, V.; Sivanantham, V.; Mohan, R.E. Modified A-Star Algorithm for Efficient Coverage Path Planning in Tetris Inspired Self-Reconfigurable Robot with Integrated Laser Sensor. Sensors 2018, 18, 2585. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, C.; Liu, X.; Yang, X.; Hu, F.; Jiang, A.; Yang, C. Trajectory Tracking of an Omni-Directional Wheeled Mobile Robot Using a Model Predictive Control Strategy. Appl. Sci. 2018, 8, 231. [Google Scholar] [CrossRef] [Green Version]
- Van Dang, C.; Ahn, H.; Lee, D.S.; Lee, S.C. Improved Analytic Expansions in Hybrid A-Star Path Planning for Non-Holonomic Robots. Appl. Sci. 2022, 12, 5999. [Google Scholar] [CrossRef]
- Massoud, M.; Abdellatif, A.; Atia, M.R.A. Mechatronic Design and Path planning optimization for an Omni wheeled mobile robot for indoor applications. In Proceedings of the 2021 31st International Conference on Computer Theory and Applications (ICCTA), Alexandria, Egypt, 11–13 December 2021; pp. 90–98. [Google Scholar] [CrossRef]
- Utama, K.V.; Fatekha, R.A.; Prayoga, S.; Pamungkas, D.S.; Hudhajanto, R.P. Positioning and Maneuver of an Omnidirectional Robot Soccer. In Proceedings of the 2018 International Conference on Applied Engineering (ICAE), Batam, Indonesia, 3–4 October 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Rahul Sharma, K. Design and Implementation of Path Planning Algorithm for Wheeled Mobile Robot in a Known Dynamic Environment. Int. J. Res. Eng. Technol. 2013, 2, 967–970. [Google Scholar]
- Wu, Z.; Feng, L. Obstacle Prediction-based Dynamic Path Planning for a Mobile Robot. Int. J. Adv. Comput. Technol. 2012, 4, 118–124. [Google Scholar] [CrossRef] [Green Version]
- Dolgov, D.; Thrun, S.; Montemerlo, M.; Diebel, J. Practical search techniques in path planning for autonomous driving. AAAI Work—Technol. Rep. 2008, WS-08-10, 32–37. [Google Scholar]
- Abbadi, A.; Matousek, R. Path Planning Implementation Using MATLAB. In Proceedings of the International Conference of Technical Computing, Bratislava, Slovakia, 9–11 November 2014; pp. 1–5. [Google Scholar]
- Karaman, S.; Frazzoli, E. Sampling-based algorithms for optimal motion planning. Int. J. Rob. Res. 2011, 30, 846–894. [Google Scholar] [CrossRef] [Green Version]
- Kavraki, L.; Svestka, P.; Latombe, J.-C.; Overmars, M. Probabilistic roadmaps for path planning in high-dimensional configuration spaces. IEEE Trans. Robot. Autom. 1996, 12, 566–580. [Google Scholar] [CrossRef] [Green Version]
- Pandey, A. Mobile Robot Navigation and Obstacle Avoidance Techniques: A Review. Int. Robot. Autom. J. 2017, 2, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Zhang, P.; Xiong, C.; Li, W.; Du, X.; Zhao, C. Path planning for mobile robot based on modified rapidly exploring random tree method and neural network. Int. J. Adv. Robot. Syst. 2018, 15. [Google Scholar] [CrossRef]
- Hao, K.; Zhao, J.; Yu, K.; Li, C.; Wang, C. Path Planning of Mobile Robots Based on a Multi-Population Migration Genetic Algorithm. Sensors 2020, 20, 5873. [Google Scholar] [CrossRef]
- Helff, F.; Gruenwald, L.; d’Orazio, L. Weighted Sum Model for Multi-Objective Query Optimization for Mobile-Cloud Database Environments. In Proceedings of the EDBT/ICDT Workshops, Bordeaux, France, 15–18 March 2016. [Google Scholar]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| PPA | P or S | Sensors | Environment | Motion | Obstacle | |
|---|---|---|---|---|---|---|
| Miao [23] | -- | S | Pose, Velocity, Current | Indoor | H | Static |
| Federico Peralta [24] | A*, PF, RRT*, FMM, uFMS | S | -- | Outdoor | -- | Dynamic |
| Christof Röhrig [8] | -- | -- | Encoders, Torque | Outdoor | H | Dynamic |
| Xiaofeng Liu [25] | HPF | S | -- | Indoor | H | -- |
| Anh Vu Le [26] | A* Based-Zigzag | P | Encoders, LIDAR | Indoor | H | Static |
| Chengcheng Wang [27] | -- | S | Velocity | Indoor | H | -- |
| Boris Crnokić [2] | Line Tracking | P | Encoder, Camera, IR sensor | Indoor | H | Static |
| Jan Carius [18] | -- | P | Encoders, IMU, LIDAR, Camera, GPS | Outdoor | H | Static |
| Jun Qian [19] | Line Tracking | P | Kinect sensor, IMU, Encoder, Ultrasonic | Indoor | H | Dynamic |
| Dang, C.V. [28] | APF | S | -- | Indoor | NH | Dynamic |
| Component Name | Specifications | Number |
|---|---|---|
| Lidar sensor | 2D laser scanner Scan angle: 360 deg Range: 12 m Sampling points: 1450 points/scan Frequency: 10 Hz | 1 |
| Magnetic encoder | Resolution: 360 step/deg | 4 |
| Inertial Measurement Unit (IMU) | MPU9250 9-axis IMU | 1 |
| Microcontroller | Arduino Mega 2560 | 2 |
| Master controller (PC) | Processor: i5-9500 CPU Ram: 8 GB | 1 |
| Wireless module | APC 220 kit RF | 1 |
| Omni wheels | Diameter: 58 mm Roller: 13 mm Material: Nylon | 4 |
| Map Number | Method of Path Planning | Convergence Ranking | Energy Consumption Ranking | Overall Ranking |
|---|---|---|---|---|
| Map1 | PRM Hybrid A* RRT RRT* | 2 1 4 3 | 4 1 3 2 | 4 1 2 3 |
| Map2 | PRM Hybrid A* RRT RRT* | 1 4 3 2 | 2 1 3 4 | 1 2 3 4 |
| Map3 | PRM Hybrid A* RRT RRT* | 4 2 1 3 | 2 1 4 3 | 2 1 3 4 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Massoud, M.M.; Abdellatif, A.; Atia, M.R.A. Different Path Planning Techniques for an Indoor Omni-Wheeled Mobile Robot: Experimental Implementation, Comparison and Optimization. Appl. Sci. 2022, 12, 12951. https://doi.org/10.3390/app122412951
Massoud MM, Abdellatif A, Atia MRA. Different Path Planning Techniques for an Indoor Omni-Wheeled Mobile Robot: Experimental Implementation, Comparison and Optimization. Applied Sciences. 2022; 12(24):12951. https://doi.org/10.3390/app122412951
Chicago/Turabian StyleMassoud, Mostafa Mo., A. Abdellatif, and Mostafa R. A. Atia. 2022. "Different Path Planning Techniques for an Indoor Omni-Wheeled Mobile Robot: Experimental Implementation, Comparison and Optimization" Applied Sciences 12, no. 24: 12951. https://doi.org/10.3390/app122412951