
Review of Flexible Piezoresistive Strain Sensors in Civil Structural Health Monitoring


1
School of Civil and Hydraulic Engineering, Huazhong University of Science and Technology, Wuhan 430074, China
2
China Railway Siyuan Survey and Design Group Co., Ltd., Wuhan 430063, China
*
Authors to whom correspondence should be addressed.
Appl. Sci. 2022, 12(19), 9750; https://doi.org/10.3390/app12199750
Submission received: 11 September 2022
/
Revised: 24 September 2022
/
Accepted: 25 September 2022
/
Published: 28 September 2022
(This article belongs to the Special Issue Inspection and Monitoring Techniques for Bridges and Civil Structures)
Abstract
:Owing to the outstanding sensing properties, especially high sensitivity and large stretchability, flexible piezoresistive strain sensors are advantageous for achieving intelligent sensing and have become a popular topic in the field of civil structural health monitoring (SHM). To explore advanced flexible strain sensors for civil SHM, this paper summarizes the recent research progress, achievements and challenges in flexible piezoresistive strain sensors. First, four common piezoresistive mechanisms are introduced theoretically. Sensor materials, including conductive materials, flexible substrates and electrodes, are explained in detail. Second, essential sensing parameters are interpreted and then followed by specific explanations of improvement strategies for the sensor performance in terms of each parameter. Third, applications of flexible piezoresistive strain sensors in the deformation measurement and damage detection of steel structures, concrete structures and fiber-reinforced composite structures are presented. Existing challenges and prospects in the practical application and large-scale production of flexible strain sensors are also reported. Last but not least, strategies for the selection of piezoresistive sensors for civil SHM are explained.
1. Introduction
With the worldwide development of infrastructure construction, enormous numbers of buildings, bridges, tunnels, railways and other infrastructure have been constructed during the past half century. Given that much infrastructure has been operated for decades, degradation and damage of structures are inevitable because of environmental erosion, fatigue load and natural disasters [1,2]. For instance, in 1995, the collapse of the Mitutoyo Department Store in Seoul, Korea, caused by functional modifications and design flaws, killed 502 people. In 2021, the collapse of a 12-story residential building in Miami, USA, killed 97 people [3]. Consequently, demands for structural health monitoring (SHM) and safety assessment of civil structures have been growing in the past decade [4,5].
Structural strain is a direct reflection of structural deformation under external force or environmental change. Thus, accurate strain measurement is one of the most important things in SHM to analyze structural performance and detect potential damage [6,7]. In practice, structural strain is usually measured using metallic wire resistance sensors, which depend on the variation in the sensor resistance under deformation. For instance, the relative change in resistance ΔR/R of a metal wire is given by (1 + 2υ)A/(ρl), where υ, ρ, l and A are the Poisson’s ratio, electrical resistivity, wire length and cross-sectional area of the metal wire, respectively [8]. The gauge factor (GF) of a metal foil strain sensor is around 2 because the Poisson’s ratio is generally within −1–0.5. This sensitivity level is insufficient for a low-strain measurement, making the signal vulnerable to external noises. Meanwhile, metal wire sensors usually sustain a maximum effective strain range lower than 2% strain, which is incapable of addressing large structural deformation. Aside from the low sensitivity and small working range, conventional metal sensors also encounter short fatigue life and environmental problems [9]. In the past few years, as novel alternatives, nanomaterial-based flexible strain sensors have displayed much higher sensitivity and larger range because of their ultrasensitive conductive material and elastic substrate. One benefit of the flexible sensor is the capability to measure both small and large strains [10]. Therefore, the flexible strain sensors show promising applicability in various fields, including SHM [11], human health care [12,13] and human–machine interfaces [14,15].
The construction industry is one of the industries with the largest carbon dioxide (CO2) emissions in the world. According to the global status report for buildings and construction publicized by the United Nations Environment Program, in 2021, the construction and operation of buildings were responsible for 37% of global energy-related CO2 emissions and 36% of global final energy consumption [16]. Under this circumstance, the development of smart SHM based on flexible strain sensors will assist managers to make maintenance decisions, which is effective for ensuring the safety of civil structures and extending the service life of structures [17]. Thus, SHM is helpful in reducing CO2 emissions indirectly. Moreover, SHM is of great significance to ensure the safety of people’s lives and property and to achieve a sustainable society (e.g., requirements of energy consumption) and economy (e.g., investment in building energy efficiency) [18].
In accordance with the sensing principle of different conductive materials, flexible strain sensors are mainly divided into three categories, namely, piezoelectric-, capacitive- and piezoresistive-based strain sensors. Flexible piezoelectric sensors measure strain on the basis of the relative potential difference between the top and bottom electrodes of the piezoelectric material under deformation. The electric potential changes immediately when the strain changes, leading to high sensitivity and fast response, which are valued in dynamic strain monitoring [19]. However, piezoelectric sensors cannot measure static or pseudo-static strain because the potential difference in the material will soon return to zero when the deformation process stops. Flexible capacitive sensors measure strain by translating the external deformation into capacitance change of the conductive material. Benefits of capacitive sensors include high sensitivity to tiny deformation, high linearity and low hysteresis [20]. Nonetheless, the fabrication process for capacitive sensors is more difficult than that for other kinds of sensors. Compared with piezoelectric and capacitive sensors, piezoresistive sensors present easier fabrication, high sensitivity and long durability. As a result, piezoresistive-based flexible strain sensors are the most widely used flexible sensors [21].
Piezoresistive strain sensors are composites that usually comprise two-phase materials, namely, the conductive phase and the substrate phase. The conductive phase provides the sensing properties of the sensors, and the substrate phase provides the shape and structural integrity of the sensors [22]. The constituents of these two-phase materials cooperate with and complement each other to achieve the functions of flexible strain sensors. One of the most important things in designing a flexible piezoresistive sensor is the choice of suitable conductive and substrate materials that meet both the sensing and mechanical requirements for practical application. Researchers tend to adjust the concentration of the conductive and substrate materials to improve the functional properties of the piezoresistive strain sensor or add extra phase materials to the composite to endow extra functionality [23]. Nevertheless, existing composite materials still encounter challenges in practical application, such as low sensitivity for tiny strain, degradation of sensing performance caused by material fatigue and plastic deformation of the polymer substrate during large cyclic deformation [24].
In practice, civil structures often suffer time-variant environments and different service conditions, such as seasonal temperature changes, construction loads, fatigue loads, typhoons and earthquakes [25,26,27]. Under these conditions, the effectiveness and stability of strain sensors in the long term are difficult to guarantee [28]. Therefore, sensors installed on structures are required to have integrated performance of high sensitivity, large stretchability and durability [29]. Specifically, measurement of the full strain range from the elastic stage to plastic buckling and then to crack propagation is very difficult for traditional strain sensors. Therefore, novel piezoresistive flexible strain sensors with improved structural design and fabrication technology are promising for realizing accurate monitoring of the complete deformation process, which is significant to intelligent civil SHM [30].
To explore advanced methodologies for monitoring the full process of structural deformation from small strain to crack propagation, this study focuses on the state-of-the-art research progress of piezoresistive-based flexible strain sensors in civil SHM. The keywords in the Abstract are used for searching and retrieving related papers before the writing of this review, namely the piezoresistive mechanism, flexible strain sensor and civil structural health monitoring. The methodology of the selection of appropriate papers for this review includes three criteria. The first criterion is that the selected papers should be highly related to the topic and keywords of this review. The second criterion is that highly cited papers and papers from high-authority journals are preferable for selection. The third criterion is the publication time of the paper. Papers published in the recent five years are more valuable because of the rapid growth and improvement of piezoresistive technologies. Aiming at a clear and comprehensive overview, the mechanisms, materials, performance improvements and applications of piezoresistive strain sensors are all considered, which can help researchers find the proper ways to achieve accurate and reliable monitoring of structural deformation. First, the basic piezoresistive sensing principles are explained, followed by an elaboration on the sensing materials, substrates and electrodes. Second, improvement approaches to sensor performance are introduced in detail by optimizing the sensing parameters of sensitivity, stretchability, linearity, hysteresis and durability. Third, applications of flexible piezoresistive strain sensors in terms of SHM are presented. The existing challenges and potential prospects are indicated. The strategies for selecting proper piezoresistive strain sensors for civil SHM are also presented.
2. Piezoresistive Mechanisms
The resistance variation of a sensor caused by deformation is known as piezoresistivity. In other words, piezoresistive strain sensors can transform strain changes into resistance changes of the sensor material. Considering that the piezoresistive materials used for SHM are almost composites that contain carbonaceous or metallic nanomaterials as conductive fillers and polymers as substrates, this review mainly focuses on the piezoresistive principles of those composites. The primary piezoresistive principles are mainly divided into four categories, namely, the interface contact effect, quantum tunneling effect, percolation network and crack propagation.
2.1. Interface Contact Effect
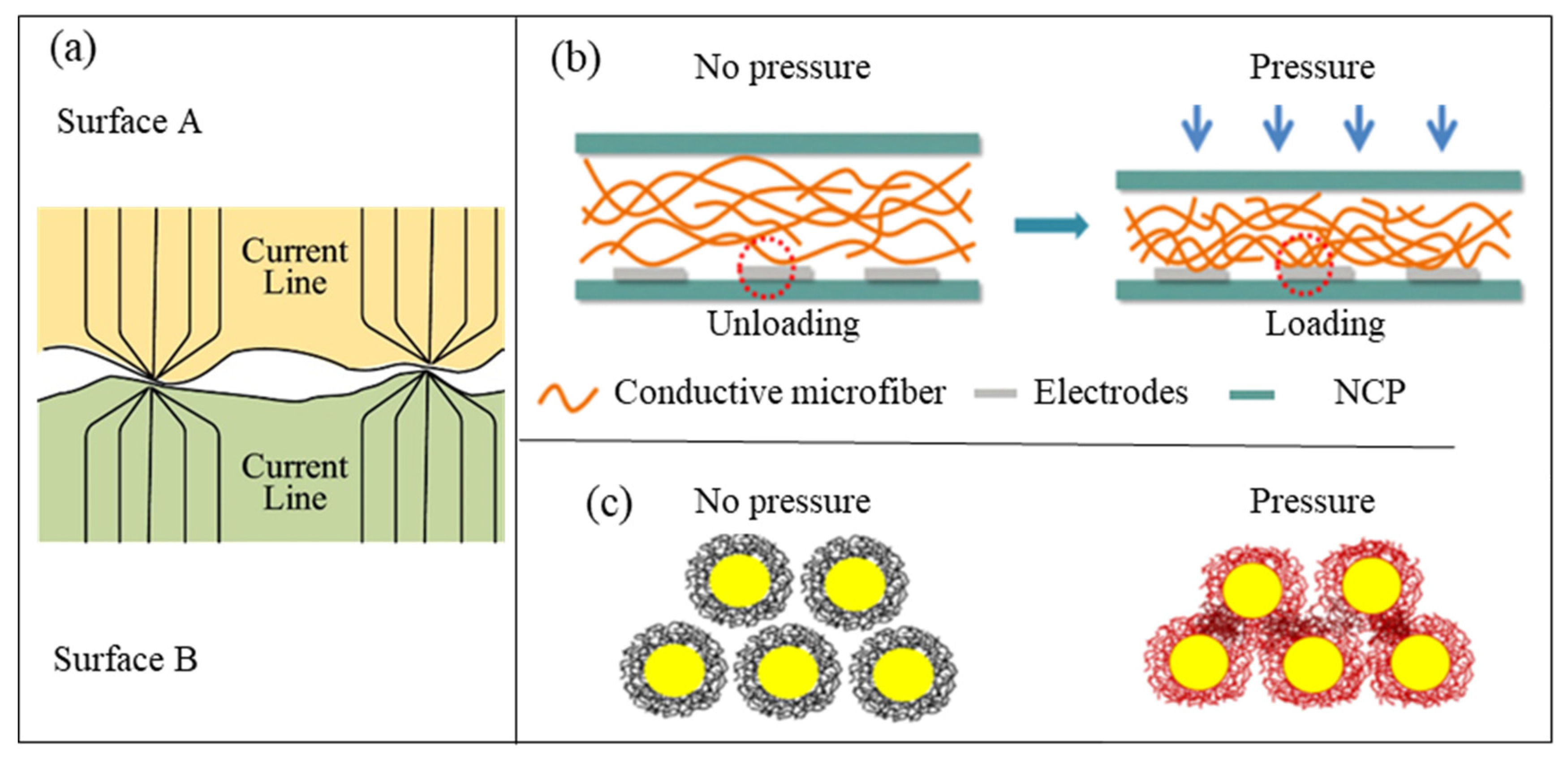
At the beginning stage of strain, the interface contact effect dominates amongst all principles. Given that the material surfaces are rough and uneven on the micro- or nanoscale, the interface contact effect occurs at the contact points between the conductive materials. The current is transmitted through these contact points [31] (Figure 1a). The number and size of contact points change with the deformation process, leading to the change in the total contact area; thus, the resistance varies. Through adjusting the number and size of contact points, high sensitivity can be obtained if the relative change rate of the contact area is large [32]. Flexible piezoresistive sensors based on the interface contact mechanism are divided into two categories. One category is adjusting the interface contact resistance between the electrode and the active layer. For example, Gao et al. used silver nanowire-coated cotton paper as conductive fiber and nanocellulose paper as the bottom substrate of a printed interdigital electrode [33]. The compression deformation of the cotton paper will cause more conductive fibers to contact the interdigital electrode to form more conductive paths; hence, the contact resistance of the sensor is reduced (Figure 1b). The other category is regulating the contact resistance between the conductive particles inside the active layer. For example, Doshi et al. fabricated a flexible sensor by electrodepositing polyethyleneimine-functionalized carbon nanotubes (CNTs) on nonconductive fibers as coatings [34]. The compression deformation of the nanocomposite leads to the formation of fiber electrical contact in the active layer, which changes the resistance (Figure 1c).
2.2. Tunneling Effect
As the strain increases, parts of the contacting conductive fillers begin to separate, and, hence, the tunneling effect appears. With this mechanism, the electrons between the conductive fillers can pass through the so-called energy barrier between adjacent but uncontacted conductive particles, resulting in tunneling currents [35,36].
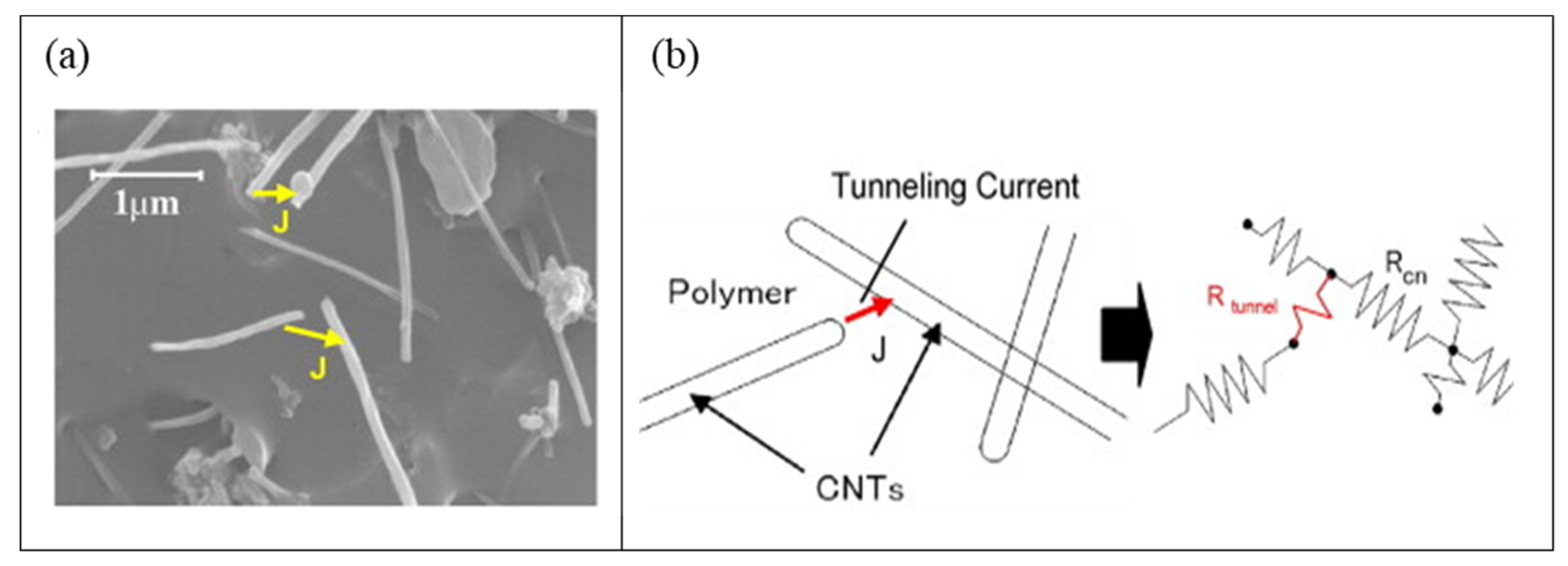
Hu proposed an improved 3D statistical resistance network model, which can evaluate the tunneling effect between randomly distributed CNTs in a polymer matrix and predict the change in the CNT network [35]. In terms of a small strain level, the change in resistivity of a CNT nanocomposite sensor is mainly due to the tunneling effect between CNTs, leading to its nonlinear piezoresistive characteristics. Scanning electron microscopy was used to realize random distribution and a possible tunnel path between adjacent CNTs (Figure 2a). This physical diagram is simplified into a model for evaluating resistance (Figure 2b). The tunneling resistance between two adjacent CNTs is estimated as:
where J is the tunneling current density, V is the potential difference, e is the quantum of electricity, m is the mass of electrons, h is the Planck constant, d is the distance between CNTs, λ is the energy barrier height and A is the cross-sectional area of the tunnel (the cross-sectional area of CNTs is used as an approximate value).
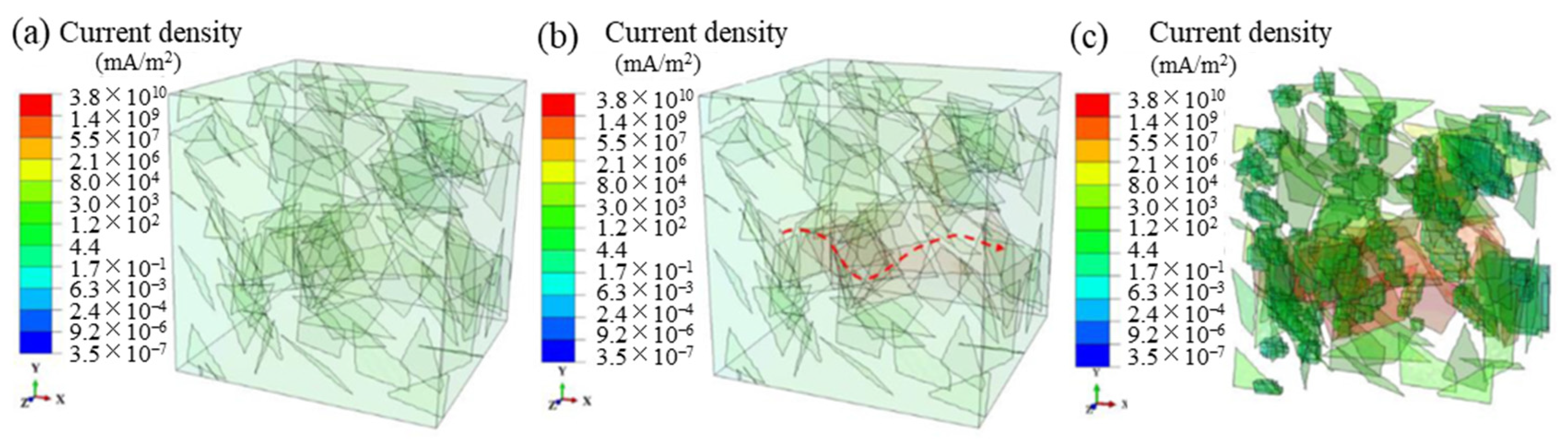
Yang et al. introduced the quantum tunneling effect to establish a representative volume element model to predict the conductivity, percolation value and mechanical properties of graphene rubber composites accurately [37]. In this model, graphene was randomly and uniformly distributed and large deformation characteristics of the rubber matrix were considered. Additionally, current density calculation results with and without considering tunneling effect were compared for further illustration of the influence of the tunneling effect. As shown in Figure 3, the current density of the rubber matrix without tunneling effect was the smallest, resulting in an insulated state of the graphene rubber composite (Figure 3a). By contrast, the tunnel current density of the composites increased significantly by about 106 times when the tunneling effect was considered (Figure 3b). Therefore, the tunneling effect is beneficial to format conductive paths in composites and is very important for accurately predicting the conductivity and seepage behavior of conductive polymer composites (CPCs).
2.3. Percolation Network
As the distance between adjacent conductive fillers increases with strain, the tunneling effect decreases gradually. In this situation, electrons can just pass through the contacting and overlapping nanomaterials. The conductive pathways form a percolation network. Piezoresistive films are usually constructed as a double-layer structure that is composed of a conductive layer and an elastomer substrate layer. Nevertheless, the conductive layer will crack or even fall off from the substrate layer in the cyclic test of long-term stability [38]. To improve the long-term stability, percolation network methodologies based on CPCs with good performance have been developed [39,40,41].
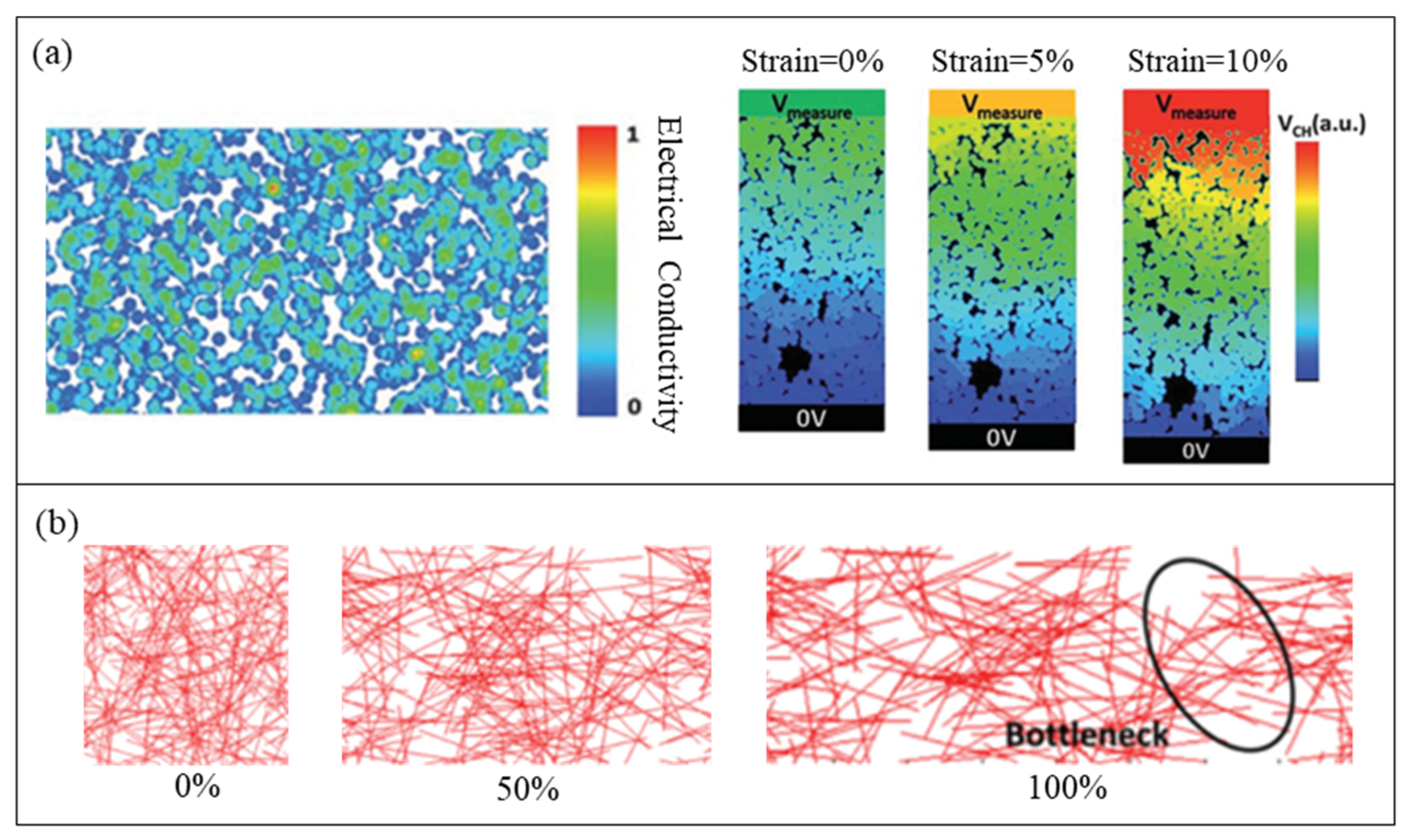
The resistivity of conductive composites depends on the content of conductive filler per unit volume in the polymer matrix. When the conductive filler has very low content, the average distance between conductive particles is large. In this case, very few conductive paths are formed; thus, the resistivity is too high for an insulator. With the increase in filler content, the average distance between conductive particles decreases, whilst the number of conductive paths increases to form a percolation network, leading to decreased resistivity of the composite. When the filler content is large enough, the conductive particles are connected to or overlap each other to form a conductive network throughout, transforming the CPC film from an insulator into a conductor. The critical volume ratio of the conductive filler at the transforming point is regarded as the percolation threshold. Figure 4a,b illustrate the development of a percolation network as strain increases in graphene flake- and silver nanowire-based CPC films, respectively.
2.4. Crack Propagation
Crack-based flexible strain sensors rely on the reconstructible disconnection and reconnection of cracks [43,44,45]. For strain sensors with thin nanomaterial films coated on flexible substrates, nano/microcracks generate at the stress-concentrated areas to release stress [23]. The quick departure of adjacent crack junctions caused by the applied strain considerably confines the conduction of electrons through the film, inducing a substantial change in the sensor resistivity [42,46]. Therefore, the crack propagation principle is advantageous to develop ultra-high-sensitive and flexible strain sensors [47,48,49]. Moreover, the sensing performance and working range are significantly influenced by parameters such as the length, width, depth and density of cracks [44,50].
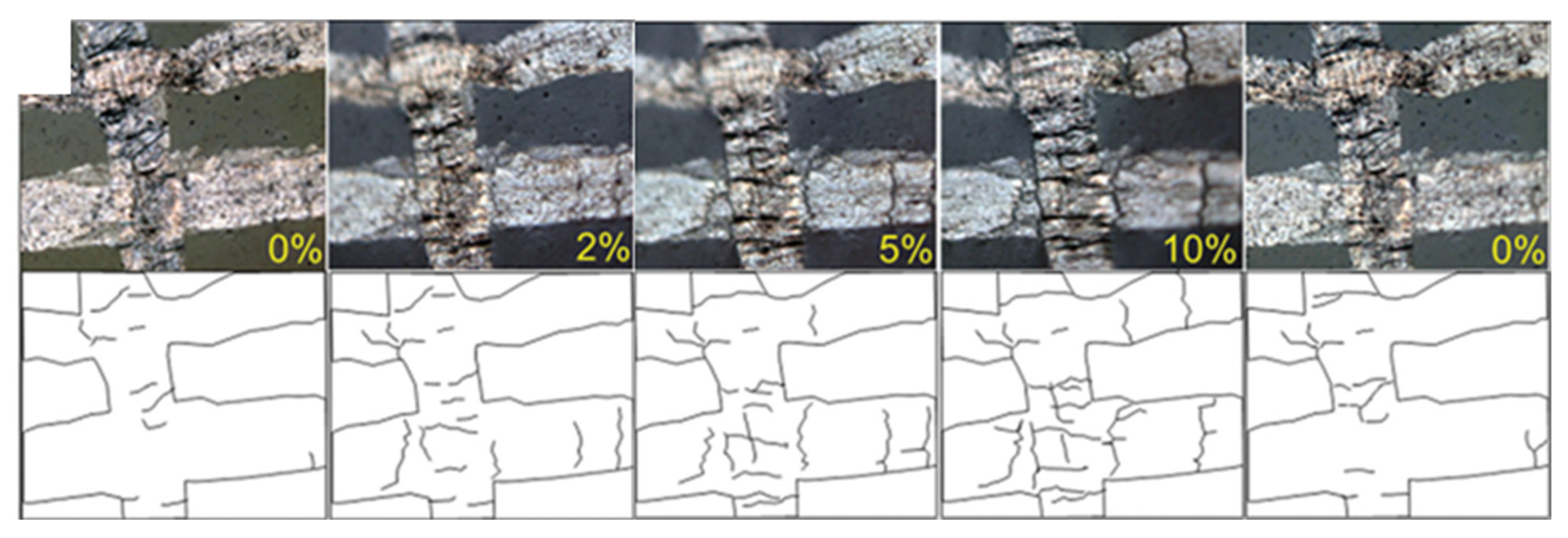
According to recent studies, microcracks were generated in thin CNT-, silver nanoparticle-, gold nanowire-, graphene- and other conductive-filler-based films coated on flexible substrates [51,52,53]. Figure 5 depicts the process of microcrack generation and development in a graphene-polydimethylsiloxane (PDMS) composite film under cyclic stretching and releasing strain. It is shown that the density and size of microcracks increased with the stretching and then recovered to their initial states after the release of the thin films. In addition, microcrack edges were reconnected upon the release of the applied strain, ensuring complete recovery of the electrical resistance [54].
In summary, the four categories of piezoresistive mechanisms explained above are common in flexible piezoresistive strain sensors. Different mechanisms predominate the electrical conductivity of strain sensors at various strain levels or concentrations of conductive fillers, and they work together to form a complete conductivity system during the overall strain range of flexible sensors. In addition, the above mechanisms can be regarded as extrinsic conductive mechanisms because the conductivity of the composite is attributed to the additional carbonaceous or noncarbonaceous conductive fillers rather than the polymer substrates [22]. The conductivity can be tuned by changing the content of the fillers, leading to different piezoresistive mechanisms.
3. Elaboration of Sensor Materials
The selection of material type is crucial and challenging in the preparation of flexible piezoresistive strain sensors because the material characters determine the working performance of the sensors. In general, a flexible piezoresistive strain sensor is composed of three parts: conductive layer, flexible substrate and electrode. When external strain is applied, the substrate begins to stretch, inducing resistivity change in the conductive layer and hence resistance change in the sensor. The resistance change is then transformed into an identifiable electrical signal through the electrode. Table 1 gives the symbols and abbreviations of the materials mentioned in this paper. This section presents specific introductions to the characteristics of the sensor materials as follows.
3.1. Conductive Materials
The conductive layer is the core part of a flexible piezoresistive sensor, which not only needs to provide conductivity for the sensor but also has the elasticity to adapt to applied external force. The conductive layer usually refers to the conductive polymer composite formed by mixing conductive fillers and insulative elastomer or conductive nanomaterials coated on insulative elastomer substrates. Materials of the conductive layer are divided into three categories: metallic materials, carbon-type nanomaterials and hybrid materials.
In accordance with the dimensions of the conductive fillers, conductive materials are divided into 0/1/2/3D materials. 0D materials mainly include nanometallic particles and CB; 1D materials mainly contain metal nanowires and CNTs; 2D materials refer to graphene flakes; and 3D materials refer to conductive polymers [46]. Amongst these materials, 1D materials have a high aspect ratio, which is helpful for forming conductive paths. Therefore, most flexible conductive composites have been prepared using 1D metal nanowires or CNTs.
3.1.1. Metallic Materials
Metallic nanomaterials, including 0D nanoparticles [55,56,57] and 1D metal Cu/Au/Ag nanowires [58,59,60], have good electrical properties and mechanical flexibility. The distance between metallic nanoparticles is usually small; thus, most electrons are transmitted via the tunneling effect. Because the quantum tunneling effect is extremely sensitive to the distance change between particles, a small strain on the metallic nanoparticle array will cause destruction and regeneration of the conductive network, resulting in a large change in resistance. Therefore, metallic nanoparticles can be used to fabricate highly sensitive piezoresistive strain sensors with assisted microcracks.
AgNW-based conductive inks have been developed and applied to print large-area stretchable strain sensors [61], but the weak connectivity between AgNWs will lead to defects, such as a small sensing range, low sensitivity and nonlinear mechanical deformation. In addition, silver is relatively expensive, which significantly increases the manufacturing cost [43]. As an alternative, CuNWs have similar conductivity to AgNWs but their cost is only one-third that of AgNWs. Nevertheless, CuNWs easily oxidize and require further methods to reduce or prevent oxidation [62].
3.1.2. Carbon-Type Materials
Commonly used carbon-type nanomaterials, including CB, CNTs and graphene, usually have excellent electrical properties and chemical stability [63,64].
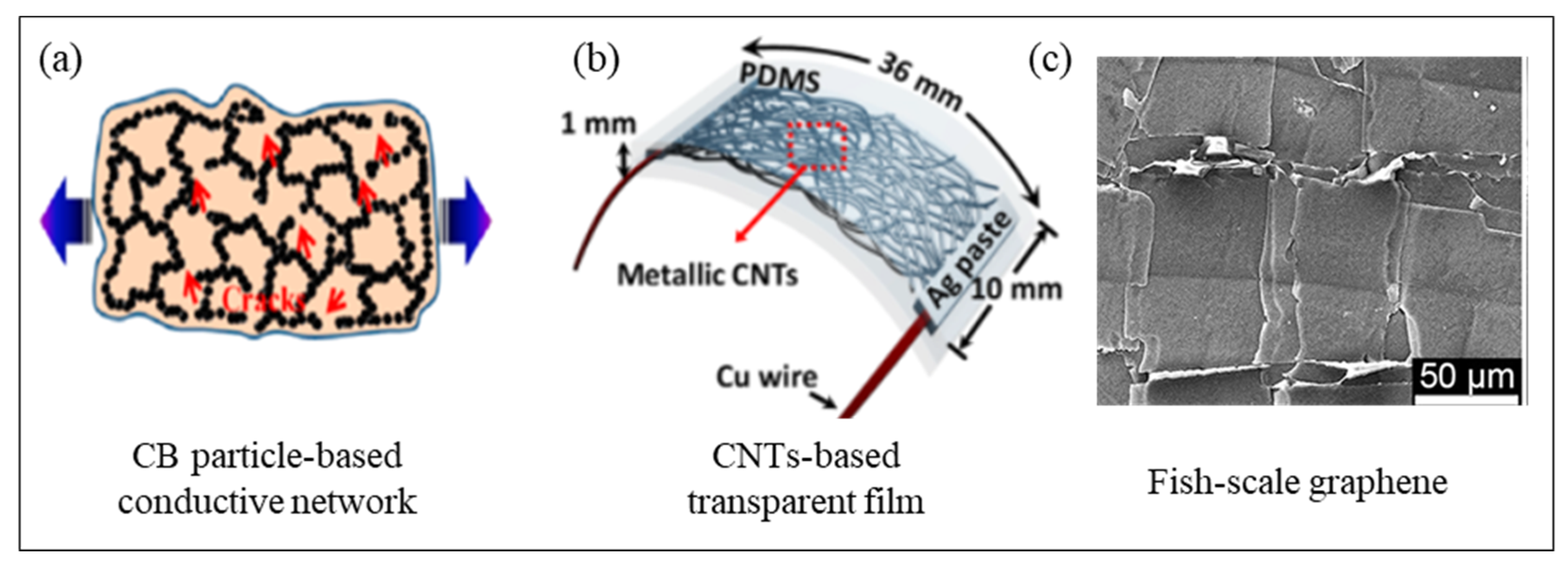
CB is an amorphous 0D conductive particle. The conductivity of CB is influenced by the particle size, structure and roughness of CB (Figure 6a). Compared with CNTs and graphene, CB is much cheaper. So far, CB-based strain sensors have been manufactured by screen printing a CB-silicon elastomer composite on a fabric to produce a series of wearable flexible sensors [65]. Nonetheless, CB is easy to agglomerate and difficult to disperse because of its tiny particle size. In this case, a high content is required to obtain good conductivity, but this leads to reduction in the stretchability. In addition, the conductive path amongst CB particles is easily damaged and reconstructed when the flexible sensor is deformed, resulting in unstable sensing performance [66].
CNTs are 1D conductive nanofibers with a low percolation threshold and excellent mechanical properties (Figure 6b). They are divided into single-walled CNTs (SWCNTs) and multi-walled CNTs (MWCNTs) [67,68]. The cost of MWCNTs is just one-tenth of that of SWCNTs. Moreover, the purity of MWCNTs in solutions can reach 99%—higher than the 90% purity of SWCNTs. Therefore, MWCNTs have much lower cost and higher purity than SWCNTs. Strain sensors based on MWCNTs have excellent sensing characteristics and a large working range. The curved structure of CNTs allows easy winding around each other in the substrate to form many contact points, which is helpful to improve the piezoresistive property of the composites [67,68]. Although CNTs have high stretchability, CNT-filled elastic polymer composites usually have relatively low GF under a low strain level and nonlinear GF under a large strain level. In addition, CNT-based strain sensors often exhibit resistance hysteresis under cyclic loading owing to the irreversible change and degradation of the conductive network. Accordingly, structural stability is very important in realizing high performance, and many strategies have been employed to resist the buckling and binding of CNT networks during cyclic deformation [69].
Graphene is a hexagonal 2D carbon nanomaterial with a honeycomb lattice composed of hybrid orbital carbon atoms (Figure 6c). It has a high transmittance of more than 90%, a large specific surface area (2630 m2/g) for a large sensing area per unit volume under strain and outstanding mechanical and thermal properties [70]. In particular, graphene has the advantages of high ductility, high recovery, high elastic stiffness (340 N/m) and good carrier mobility at room temperature, making it very suitable for flexible strain sensors with good sensing performance and stability [71,72].
3.1.3. Hybrid Materials
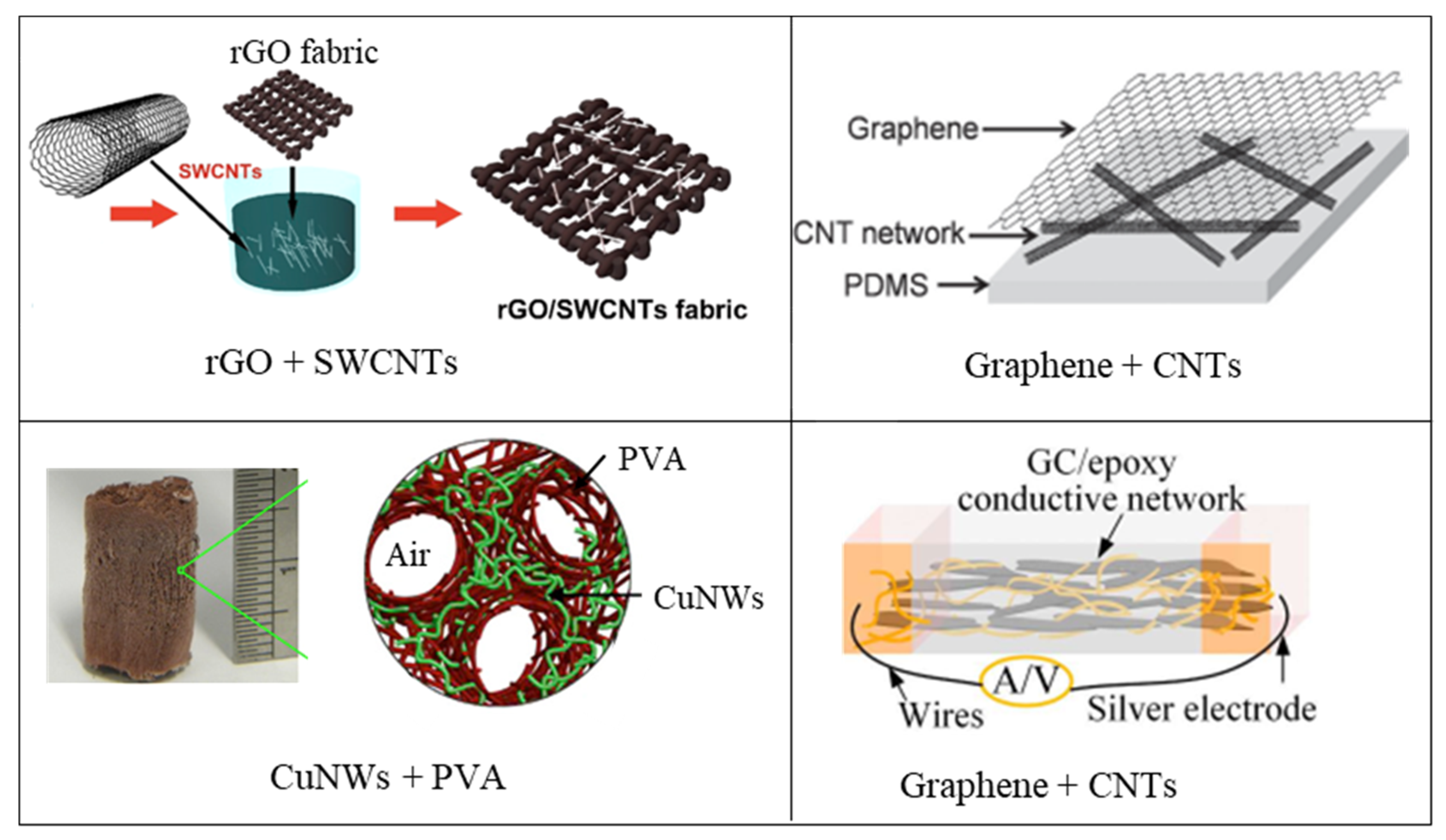
According to the explanations above, each type of conductive material has its own pros and cons in application. To improve the sensing and mechanical properties of single-material sensors, numerous studies have focused on the combination of nanomaterials with different dimensional sizes and properties. One value of hybrid materials is the ability to compensate for the disadvantage of a single material by combining the merits of other materials, as shown in Figure 7. For example, compared with graphene- or CNT-based strain sensors, strain sensors based on graphene-hybridized CNT films are beneficial for achieving higher linearity and reproducibility under cyclic tensile strains of up to 20%. This was ascribed to the strong interaction and effective load transfer within the hybridized films that successfully resisted the buckling of CNTs. In addition, soft AuNWs and hard AgNWs were combined to make stretchable transparent films [73], which showed a wide measurable strain range of 0.05–70% and a high sensitivity of 236.6 within the 5% strain level. These attributes are difficult to achieve with a single component of either AuNWs or AgNWs.
Another benefit of hybrid conductive fillers is the ability to tune the piezoresistive sensitivity of flexible strain sensors. For example, the incorporation of CB reduced entanglement in the MWCNT network, which promoted strain sensitivity [74]. Similarly, a composite film composed of CB and CNTs exhibited high sensitivity, high durability and electrical stability under fatigue cycles owing to the synergistic effect of the dual conductive network formed by CNTs and CB [75]. Furthermore, combinations of MWCNTs and CB [74,76], CNTs and graphene [77], AgNWs and graphene particles [43] and AgNPs and SWCNTs [47] have been reported.
In a word, hybrid fillers show benefits for the improvement of electrical conductivity, sensing properties and stretchable range in flexible piezoresistive sensors because of the various conductive connections and the complementary mechanical properties amongst different materials.
3.2. Flexible Substrates
Flexible substrates provide a large stretchable range for piezoresistive sensors. In the application of SHM, the substrates are pasted to the structural surface by using epoxy or another adhesive. The generally used flexible substrates in SHM include PDMS [74,78,79], Ecoflex [80] and thermoplastic polyurethane (TPU) [81,82].
PDMS has the advantages of low elastic modulus, high elasticity, good formability, transparency, good thermal stability and corrosion resistance; therefore, it is the most widely used substrate for fabricating flexible sensors. Zhang et al. prepared a strain sensor based on CNT arrays encapsulated by PDMS [74]. In their study, the flexibility of PDMS was consistent with that of CNTs; hence, the sensor still maintained reliability and stability after cyclic bending it 8000 times. Lee et al. produced a metallic CNTs/PDMS composite film, which had 92% high transparency in the visible light range and all-round outstanding performance in sensitivity, hysteresis, linearity and drift [79]. Nevertheless, PDMS is sensitive to temperature change and is prone to ageing in the long term.
Ecoflex has excellent mechanical flexibility, water resistance and long-term stability. As an example, Amjadi et al. employed Ecoflex as a substrate and CNTs as conductive filler to fabricate an ultrasoft strain sensor. Given the strong interface between the CNTs and the Ecoflex, the composite sensor has high reliability, high linearity and an ultra-large strain range [80].
TPU has higher toughness, higher tear strength and stronger resistance to mechanical damage than PDMS. Moreover, TPU-based substrates still maintain the original function after more than 1000 large-tensile cycles. As a result, TPU has gradually become utilized as a common matrix material for flexible sensors in recent years [81,82].
High-performance polymers, such as polyimide (PI) [83], polyurethane [84], polyvinyl alcohol [85] and polyethylene terephthalate [86,87], have also been employed as substrates in different application scenarios.
Table 2 shows the materials of the above piezoresistive sensors and their corresponding sensing properties. Specifically, the maximum detectable strain range, the GF within the working range, the linearity and the cyclic times for long-term durability are illustrated. It is found that the properties of different piezoresistive sensors are quite different from each other, even though they have the same conductive filler. Another phenomenon is that a flexible sensor can hardly achieve co-existence of high GF, large detectable range and good linearity. A sensor with a relatively large range and high GF always has a nonlinear strain-resistance relation, while a sensor that possesses a large range and good linearity regularly meets a low GF. The main reason for this phenomenon is probably the mutual conflict between the concentration of conductive filler and the ratio of resistance variation. Therefore, the sensing properties should be improved to meet the demands of practical application, as presented in the following Section 4.
3.3. Electrodes
Electrodes serve as the connections between a sensor and a signal receiver instrument. Electrical signals generated from the conductive layer are transmitted to the receiver through electrodes; thus, electrodes should have good conductivity and stability during the overall deformation process of the strain sensor. Stretchable electrodes based on metallic nanoparticles or nanowires, ionic hydrogels and conductive polymers have been widely studied [88,89,90].
For instance, polyacrylamide–sodium alginate hydrogel was used to fabricate a scalable, transparent (90% transmittance) and ultrathin (380 μm) electrode that can collect energy from human motion [88]. An aluminum electrode was used to link polymer-based aerogel to the signal receiver [89]. A filament serpentine gold electrode, which has stronger adhesion than ionic hydrogels, was used on epidermal electronic systems [90]. Generally, metallic electrodes are the most commonly used electrode materials in SHM.
4. Optimization of Sensor Performance
To evaluate the working performance of the flexible strain sensor, several parameters are indispensable, including sensitivity, stretchability, linearity, hysteresis and dynamic durability. As mentioned in Section 3, the selection of the appropriate material type is essential to the working performances of strain sensors; nevertheless, there are still problems beyond that. For instance, the incomplete stress transfer between the conductive layer and the substrate layer will reduce the sensing accuracy because of the elastic mismatch and weak interfacial adhesion between them [91]. Moreover, the prevalent resistance hysteresis between the loading and unloading processes is ascribed to the internal friction between the material layers and the inherent viscoelastic character of the polymer substrates [91,92]. Additionally, the destruction and reconstruction of the conductive networks are unstable during deformation process, leading to unstable sensitivity and low linearity. Besides, the sensing performance usually shows a degradation trend during cyclic stretching/releasing loadings. This is attributed to plastic breaks of the polymer substrate and the buckling of the conductive layer during large cyclic deformation [76]. As a result, improved structural design and fabrication technology are requested to deal with the above problems for better sensing performance.
4.1. Improvement of Sensitivity
The sensitivity of a sensor is also called the gauge factor (GF), which reflects the amplification factor of the conductive materials for resistivity response to external deformation. It is regarded as the most important parameter of sensor performance, especially for subtle strains or cracks. In terms of a piezoresistive strain sensor, the GF is defined as the ratio of the relative resistance variation to external strain [92]. Note that the GF is usually a linear regression constant within a linear strain range of the sensor [93]. The GF value is influenced by many factors, such as the type, content and dispersion of the conductive fillers, and the interaction between fillers and substrates. In general, fillers with a content near the electrical percolation threshold show the largest GF value, while this GF hardly reappears because of the unstable conductive network. In this case, the sensitivity is mainly determined by the ratio of tunnel resistance to total resistance [94].
Therefore, the key point of sensitivity improvement is to regulate the morphology of the conductive network. An effective way to tune the conductive network is to combine different types of fillers. For example, the sensitivity of a CNTs-CB hybrid filler is regulated by changing the mass ratio of CNTs to CB. The CNTs act as conductive pathways in the conductive network, and the CB particles are located between the adjacent CNTs. When the CNT has a low content, the connections between CB particles and between CB particles and CNTs were weakened as the sensor stretched. In this case, the conductive structure became more susceptible to tensile strain; therefore, the lower mass ratio led to a higher GF value at a low strain level. Additionally, strong interfacial binding between conductive fillers and elastic substrates is also helpful to realize higher GF. For example, Lin et al. developed tunable sensitivity composites using CNT and thermoplastic elastomer [74], and Kang et al. combined reduced graphene oxide with polyvinyl fibers [95].
On the other hand, high sensitivity can also be achieved through crack-assisted conductive structures and micro- or nanostructures [96,97]. Inspired by the crack-shaped organs of spiders, a microcrack-assisted piezoresistive strain sensor using AgNWs and patterned PDMS substrates was fabricated, with many microcracks inside the composite. Attributed to its ultrasensitive microstructure, the sensor showed a remarkable GF value of 1.5 × 105 within a 60% strain range [49]. Besides, a crack-assisted strain sensor composed of AgNWs and graphene was developed, which showed a GF = 20 within a 0.3% strain, GF = 103 within a 0.3~0.5% strain, and GF = 4 × 103 between a 0.5~1% strain [43]. According to recently studies, microcracks are generally generated by the pre-stretching or bending, thermal solvent evaporation, and cooling process [43,98]. Moreover, other microstructures, such as interlocked structure, whisker structures and cotton fabric molded structures, have also been applied for higher sensitivity [99]. In addition to high sensitivity, the microstructure-assisted strain sensors also have the benefits of fast response and high stability [100,101].
4.2. Improvement of Stretchability
As for civil SHM, the stretchability of traditional strain sensors that is below the 2% range is sufficient for regular deformation monitoring but insufficient for detection of structural cracks and damages [29]. Hence, a wider working range is necessary for large-strain and damage tracking. Basically, stretchability of the flexible sensor depends on not only the elasticity of the polymer matrix, but also the stability of the conductive network during stretching [78].
There are two categories of approach to improve the stretchability. The first category is adopting stretchable conductive materials, as well as elastic substrates. Commonly used stretchable conductive fillers such as 1D CNTs, 1D AgNWs and 2D graphene have high-aspect ratios that can form many twists in the network [102,103]. These nanomaterials have been either mixed into an elastomeric polymer matrix or integrated in the middle layer/on the top layer of substrates [104,105]. In addition, a strong binding between the conductive materials and the polymer substrates is valuable for achieving high stretchability [80]. In a word, approaches of the first category are based on exploiting the intrinsic properties of sensor materials; therefore, they are helpful for simple fabrication and cost-effective production [106]. The second category is the special structural design of the flexible sensor, including out-of-plane designs such as 3D wavy, wrinkled and coiled shapes [107,108], as well as in-plane designs such as buckled, serpentine pattern, and mesh-like geometries [109,110]. Note that these designs help sensors to withstand much larger strain and there is no need to be concerned about sensors breaking during stretching [111]. Nevertheless, fabrications of these sensors require more complicated multi-processes and higher costs than the approaches of the first category [112].
Furthermore, there exists a common problem in pursuing high sensitivity and high stretchability at the same time [113], which is the balance between these two parameters. Specifically, a wide sensing range requires that the active material can keep its structural connections at a high strain level, whereas detection of subtle strain demands the resistivity of the conductive fillers to change significantly under a low strain level [91]. In this case, proper design and control of the connection types of sensing materials are vital to guarantee both high sensitivity and high stretchability [114]. For example, Amjadi et al. developed an ultrasensitive and highly stretchable strain sensor based on thin graphite films with parallel microcracks coated on top of Ecoflex, showing a high GF value of 5.2 × 102 at a large strain of 50% [50]. Furthermore, a combination of microcracks and scale-like structures was utilized to develop a high-performance strain sensor that possesses high sensitivity, high stretchability (GF value of 107 at 120% strain), fast response and remarkable stability.
4.3. Improvement of Linearity
The linearity directly reflects the sensing stability of a strain sensor, which is evaluated by the coefficient of determination (R2) of the linear regression between the electrical signal and the applied strain. A larger R2 indicates a stronger linear behavior of the sensor [115], while nonlinear behaviors are more common in practice [116,117]. In fact, the linearity relies on the degree of conductivity of the sensor. In other words, good linearity comes from high filler content, while low filler content contributes to nonlinearity [118]. This is because the dominant conductive mechanism changes gradually from the contact effect to the tunneling effect and then to the percolation effect as the filler content decreases.
The resistance change induced by the contact effect is the dominant mechanism at the initial strain stage, leading to a linear response [119]. As for a filler content close to percolation threshold, there are not enough conductive particles to form reversible conductive paths so conductivity is mainly achieved by the tunneling effect, resulting in a nonlinear strain response under stretching [120,121]. For instance, a strain sensor based on an Ecoflex/CNT/Ecoflex sandwich-like structure was produced with a high-dense network. The strain sensor possessed marvelous stretchability of over 500% and high linearity (R2 > 0.95). However, the corresponding GF is low because of the stable conductive network formed by the high-dense filler. Other reasons for the excellent linearity of this sensor are the strong binding between the CNTs and Ecoflex substrates [80].
In addition, the piezoresistive linearity is also influenced by the substrate property. Yang et al. recently developed a highly sensitive strain sensor with graphene-woven fabrics (GWFs) on a PDMS substrate. By tuning the Young’s modulus of the PDMS substrate from hundreds of kPa to a few MPa, the R2 value was improved from 0.91 to 0.98 [122]. Note that some studies achieved high sensitivity and linearity simultaneously by integrating hybrid sensing materials on polymer composites [123]. Benchirouf et al. reported that an rGO/MWCNT nanocomposite film on a flexible substrate exhibited a GF of 8.5 with a high R2 of 0.98. Lately, Xin et al. developed a crack-assisted strain sensor with high sensitivity, high stretchability (GF > 4.2 × 104 at 150% strain) and high linearity (R2 = 0.98 within 15% strain, and R2 = 0.96 from 22% to 150% strain), which were ascribed to the dense and well-controlled network cracks [124].
In summary, the piezoresistive linearity is relevant to the change in the dominant conductivity mechanism corresponding to specific strain domains [125,126], so that high dense, stable and robust networks will lead to a higher linearity [127]. On the other hand, the incompatibility of high sensitivity, high stretchability and satisfactory linearity was still a great challenge in developing high-performance strain sensors [42,118].
4.4. Improvement of Hysteresis and Durability
Hysteresis and dynamic durability are key parameters to indicate sensing performances under applied dynamic forces. Hysteresis is defined as the inconsistent or non-monotonic resistivity variations during a loading–unloading cycle [128]. Dynamic durability reveals the endurance of strain sensors to long-term cyclic loadings, including stable and reproducible resistive responses and mechanical integrity. In general, hysteretic behavior and response delay exist in all polymer-based strain sensors. They are regularly attributed to reasons that include the intrinsic viscoelastic nature of polymers, the viscoelastic characteristics of conductive fillers, poor interfacial adhesion, and the imperfect recovery of conduction paths because of friction between the sensing element and the elastomeric matrix [92,118].
First, a large interfacial area of conductive fillers and polymer raises the time delay [129]; thus, strong binding between the elastomeric fillers and the polymer matrix is helpful to eliminate the hysteresis effect [42,80]. Second, ultra-soft substrate provides a lower force for quick formation of the conductive network [97]. Third, polymers with smaller viscoelastic properties are recommended to ensure accurate strain measurement [92]. Besides, woven-based piezoresistive fiber/yarn/textiles also provide solutions to lower hysteresis because of the high stretchability and fast response of the woven structure for overcoming the viscoelastic delay of polymer substrates [108,109]. Generally, the piezoresistive fibers/yarns/textiles are fabricated by integrating conductive materials on the surface of the fiber/yarns through coating, ink writing and wrapping processes [130,131].
In fact, the hysteretic behavior depends on the integrity and robustness of the conductive network at different strain levels [93,118]. For instance, the “shoulder peak” hysteretic behavior for CNT/TPU composites at a 30% strain is much more obvious than that at a 5% strain [77]. This is because the weak destruction of the CNT network is easy to recover under small strain, while the destruction and establishment of the conductive network under large strain is more complicated. Similarly, Duan et al. presented that the evenly distributed and densely packed CNT conductive network in polymer suffered almost no evident changes, resulting in stable dynamic durability under a wide strain range within 10% to 50% [68]. Additionally, the response time of the crack-based strain sensors is faster because of their quick and easy reconnection–disconnection transformation [129,132].
In terms of long-term application, there is usually a declining trend of the sensing performance with the increasing number of cyclic stretching/releasing [133,134], owing to the unequal deconstruction and reconstruction of the conductive pathways during cyclic loadings. Another reason for the degradation is the irreversible plastic deformation of substrates under large strain, and the fracture of conductive fillers. Additionally, long-term exposure to a harsh working environment will also lead to the performance decline and service life reduction in a flexible sensor [42,118]. In this case, growing efforts toward self-healing technologies have been made to improve the sensor’s durability. At present, the self-healing of a polymer structure is achieved via passive extrinsic methodologies and active intrinsic methodologies [135]. Extrinsic self-healing is being performed via the leakage of a pre-embedded healing agent or catalyst from cracked microcapsules or microvascular systems. Extrinsic self-healing is usually restricted to only happening once and is incapable of multiple healings. Conversely, intrinsic self-healing is offered by reversible covalent bonding and supramolecular interactions, which are capable of multiple healings. Once the healing cycle proceeds, the sensor material will recover partial mechanical properties with or without external trigger intervention. Self-healing material will significantly extend the service life of a flexible strain sensor and reduce the maintenance cost of civil SHM [136].
Table 3 shows some typical flexible strain sensors with improved sensing properties. Compared with the property values in Table 2, the most remarkable improvement of the flexible sensors shown in Table 3 is the more accurate linearity. Most of the sensors showed linear or multi-stage linear characters. For instance, the flexible sensor proposed in [91] showed multi-stage linearity within the strain ranges of ε < 2%, 2% < ε < 15% and ε > 15%. Owing to the improved linearity, the mathematical sensing model became more precise, namely with fixed GF values and clear working ranges. The improved linearity and precise GF are mainly attributed to the implementation of braid micro-structures or micro-cracks, the reinforced bonding between the conductive filler and substrate, and the integration of hybrid materials. In addition, a few sensors showed the compatibility of multiple properties. Noting that the sensor described in [105] achieved all-round performances of large range (200% strain), relatively good sensitivity (GF = 10.5), good linearity and outstanding durability (180,000 cycles under 30% strain), this all-round sensor is very promising not only in the civil SHM but also other fields.
Above all, the sensing performances of the flexible sensors were effectively improved through different methods, which inspired researchers to develop more advanced flexible strain sensors. Nevertheless, the compatibility of high sensitivity, high stretchability, low hysteresis and long-term stability is still a common challenge, especially for civil SHM, in which not only subtle strain but also large strain on the structural surface need to be captured.
5. Applications and Prospects in Civil SHM
In the past decades, cement-based embedded piezoresistive sensors have been applied in concrete structures because of their high sensitivity and good linearity. Nevertheless, sensing performances of the cement-based strain sensor are influenced by temperature and humidity. Its poor plasticity also placed restrictions in large deformation monitoring [137,138]. In contrast, conductive polymer-based flexible strain sensors are capable of overcoming the above shortcomings because of their high sensitivity being compatible with large stretchability, which is helpful in monitoring not only strain but also cracks or damage in such infrastructure as bridges, high-rise buildings and other civil structures. With the development of conductive materials and fabrication technologies, flexible piezoresistive sensors in the SHM of concrete structures, steel structures and fiber-reinforced composite structures have been proposed.
5.1. Steel Structures
Steel structures usually suffer yield or bulking damage from large deformations; hence, the target of strain monitoring of steel structures focuses on sensing large strain. Terada et al. used carbon particles as conductive filler and epoxy resin as substrate to prepare a thin film for monitoring the integrity of steel structures. Results showed that the thin film was able to accurately measure the strain of the steel structure with a gauge factor of 25 and a sensing range of 0~0.6% strain, whereas the sensitivity of the sensor decreased significantly when the tensile strain exceeded 0.6% [137]. Compared with the traditional metallic foil strain sensor, this film strain sensor has a much higher sensitivity (25 >> 2) but a smaller sensing range (0.6% < 2%).
Ku-Herrera et al. made a MWCNTs/vinyl resin composite strain sensor, which showed a relatively large detectable range of 20% strain. The sensor also has a linear relationship between deformation and electrical resistance within 1% tensile strain, whereas it has a nonlinear relationship in compressive strain [138]. The gauge factor of this sensor is about 2.6 (ε < 1%), which is similar to the metallic foil strain sensor. Besides, the durability of the sensor is unknown because the cyclic times of stretching and releasing in their experiment was just 10 times.
Lundberg et al. developed a strain sensor with CNTs as filler and epoxy resin as substrate for monitoring the deformation of steel structures. This sensor performed well within a 0.12% compression strain and 0.14% tension strain under low loading frequency and less cyclic loading times [139]. Nevertheless, the corresponding sensitivity (GF) and the sensor performance for a strain range larger than 0.14% are not given.
The sensing properties of the above piezoresistive sensors are also shown in the first three rows in Table 4. It is indicated that the above sensors for the SHM of steel structures are still not absolutely advantageous over the traditional foil sensor, since they have either higher sensitivity but smaller sensing range, or a larger strain range but unknown durability. More work is required on the compatibility of multiple properties.
5.2. Concrete Structures
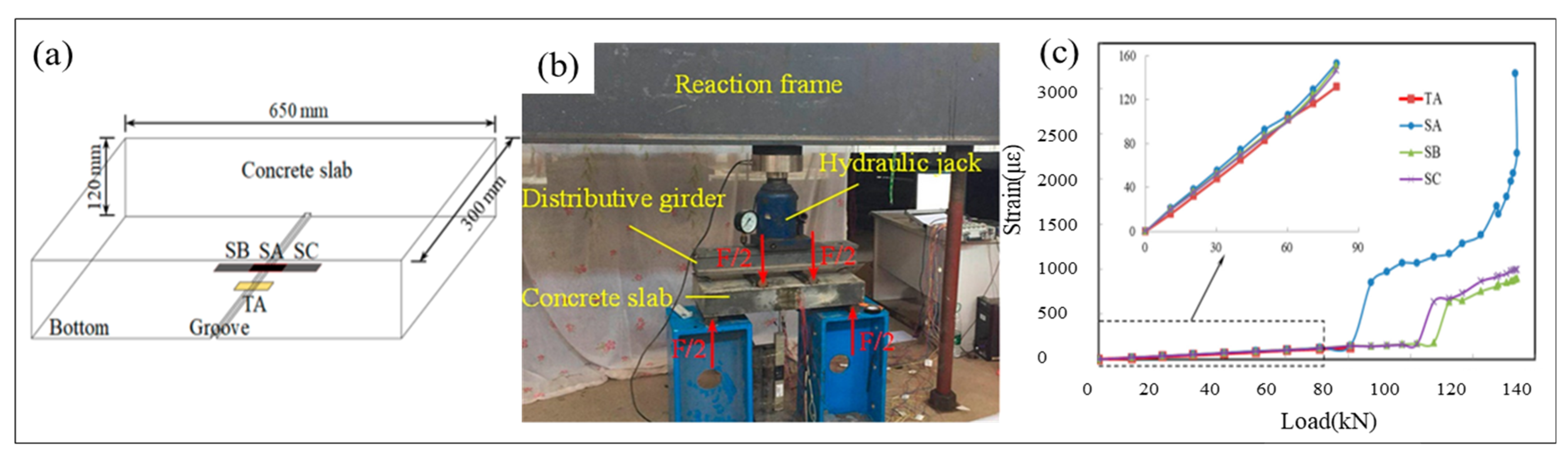
Different from steel structures, concrete structures crack under large tensile and compressive deformation. Researchers developed piezoresistive strain sensors using carbonaceous fillers or metallic fillers. In terms of carbonaceous fillers, Ji et al. prepared CB/epoxy composite film sensors to monitor the overall stress and deformation process of concrete columns and reinforced concrete beams [140]. In this case, this film sensor showed a sensing strain range of 1.2% and a GF higher than 11, leading to the accurate measurement of strain and the preliminary location of the crack in the monitoring area [141]. In addition, Zhang et al. designed a composite polymer film by blending solutions of MWCNTs and PDMS, and then investigated the sensing properties of the polymer film for the deformation and crack monitoring of concrete structures. This polymer film showed a large sensing range of 50%, but a nonlinear strain-resistance relationship with various GFs from 1.5 to 6 [142]. Wu et al. fabricated a flexible sensor using graphene oxide as conductive filler, cellulose nanofiber as dispersant, and waterborne epoxy as polymer matrix. This sensor showed large stretchability of a 55% strain, a GF of about 34, and good linearity and repeatability within a 4% strain range. Full-scale tests demonstrated the sensor’s capability to monitor the strain and detect cracks on a concrete surface (Figure 8) [143,144].
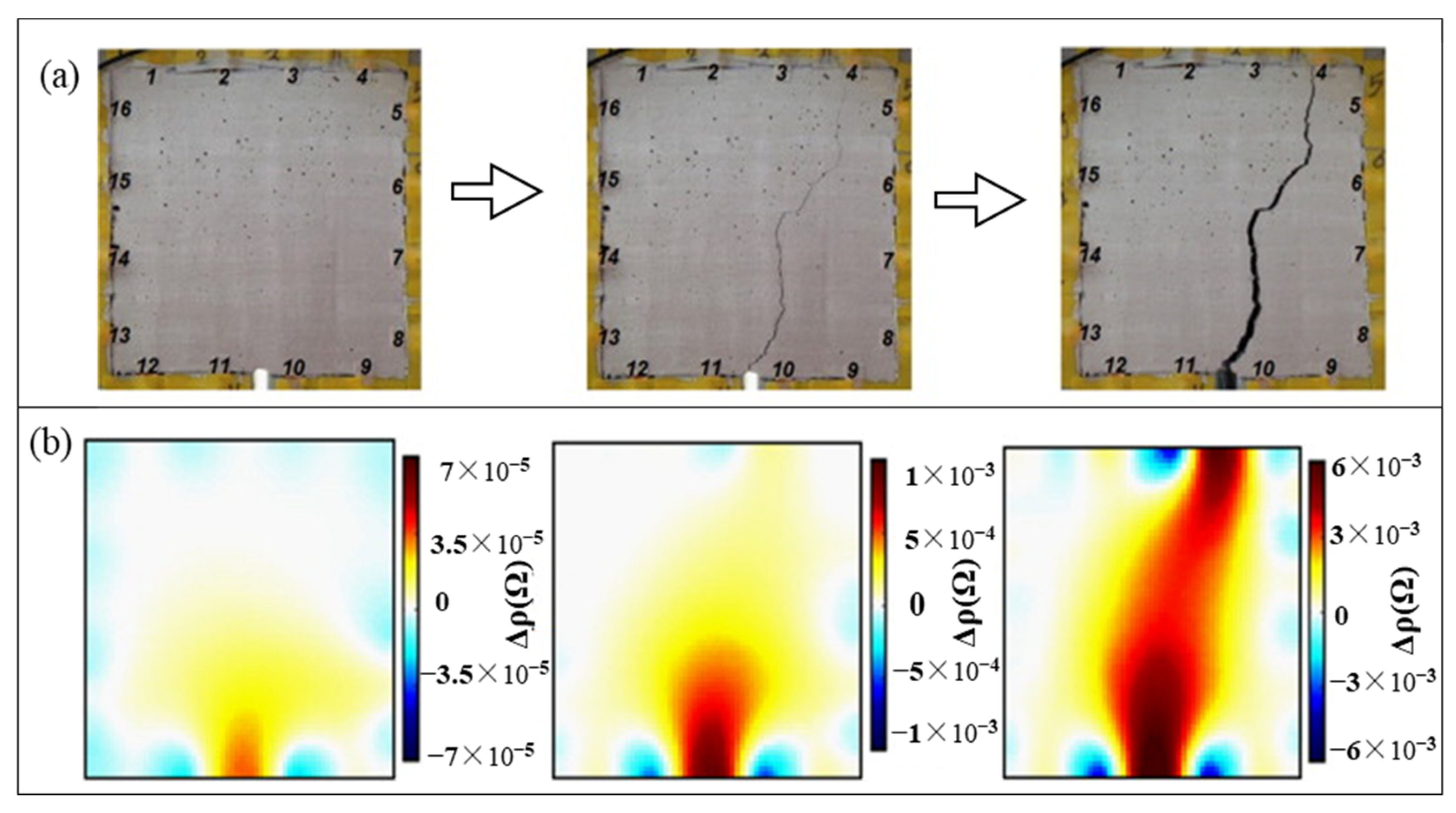
On the other hand, in terms of metallic fillers, Zhang et al. proposed a crack-width monitoring approach by screen printing CuNWs with different ultimate strains on an epoxy-resin structural surface. They established a multilayered stress-transfer model to quantify the proportional relationship between the crack width and the ultimate strain of the CuNWs, and then redesigned a smart film to assess cracks on a practical large-scale bridge [145]. Besides, Ryu et al. prepared a AuNPs/PDMS composite by an in situ reduction method, and then studied its optical properties under tensile strain. This composite showed a linearity between the light absorption rate and the tensile strain within a proper strain range [146]. Moreover, Hallaji et al. applied conductive silver glue to fabricate a multi-electrode sensing skin, the resistivity of which was monitored by electrical resistance tomography [147]. By using a differential imaging scheme, it is worth noting that this skin was able to locate the through crack of a concrete beam and track the process of crack propagation, as shown in Figure 9. Nevertheless, the sensitivity of the skin is relatively low because of the very tiny variation of the resistance of the conductive silver glue, and the quantitative relationship between resistance variation and crack length/width was not provided in their work. Additionally, the resolution and accuracy of crack sensing is highly related to the quantity of the electrodes, whereas it is unpractical to set many electrodes on a sensing film in field monitoring.
5.3. Fiber Reinforced Composite Structures
With the increasing demand for fiber-reinforced polymer (FRP) materials in structural strengthen and renovation [148], the safety and reliability of the FRP-related materials become crucial [149]. Traditional approaches for monitoring the FRP materials were based on fiber Bragg gratings (FBGs), as well as ultrasonic sensors, which require complicated analysis processes and expensive resolving devices [150]. Moreover, an FBG sensor can only detect the strain or crack of a single point at the sensor area; thus, it is difficult to monitor the deformation and damage at different locations on FRP composites. In addition, FBGs are vulnerable to water and corrosive chemicals, so they need protective sleeves and cannot be compatible with FRP material because their diameters are very different [150].
Compared with FBG-based methods, the electrical resistivity effect of the FRP materials themselves were noticed by scientists and developed for self-sensing composites [151,152]. Nevertheless, resistivity parameters of the rough FRP materials without other additives are hard to control, which brings negative impacts to the sensing performance. To enhance the sensing ability, carbon-based fillers were considered to improve the sensitivity and stability of the detection performance of the FRP materials [153,154,155]. In general, CNTs or graphene are bonded to the surface of the FRP through coating and chemical vapor deposition. Due to the tiny size of CNTs, conductive networks are formed in the interfaces of carbon fibers. Therefore, local area monitoring is achieved by regulating the deposition of CNTs to the damage-prone area of the FRP composite structure [156,157].
As an example, Salvado et al. preliminarily investigated the properties of several continuous carbon-fiber epoxy-resin composites for strengthening concrete structures [158]. They improved the sensing ability of small-range strain by setting various geometric shapes and arrangement modes of the carbon fibers. As shown in Figure 10, composite materials were made on site for structural reinforcement in civil engineering. Results showed that the composite cannot only sense a small deformation of less than 1% strain, but also increase the strength and bearing capacity of the original concrete structure.
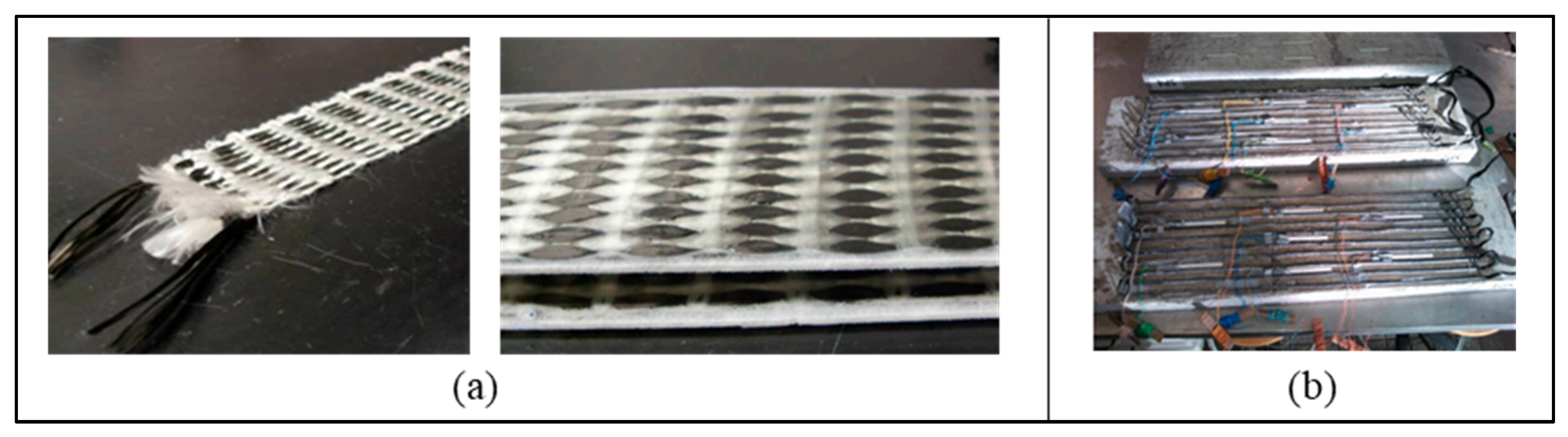
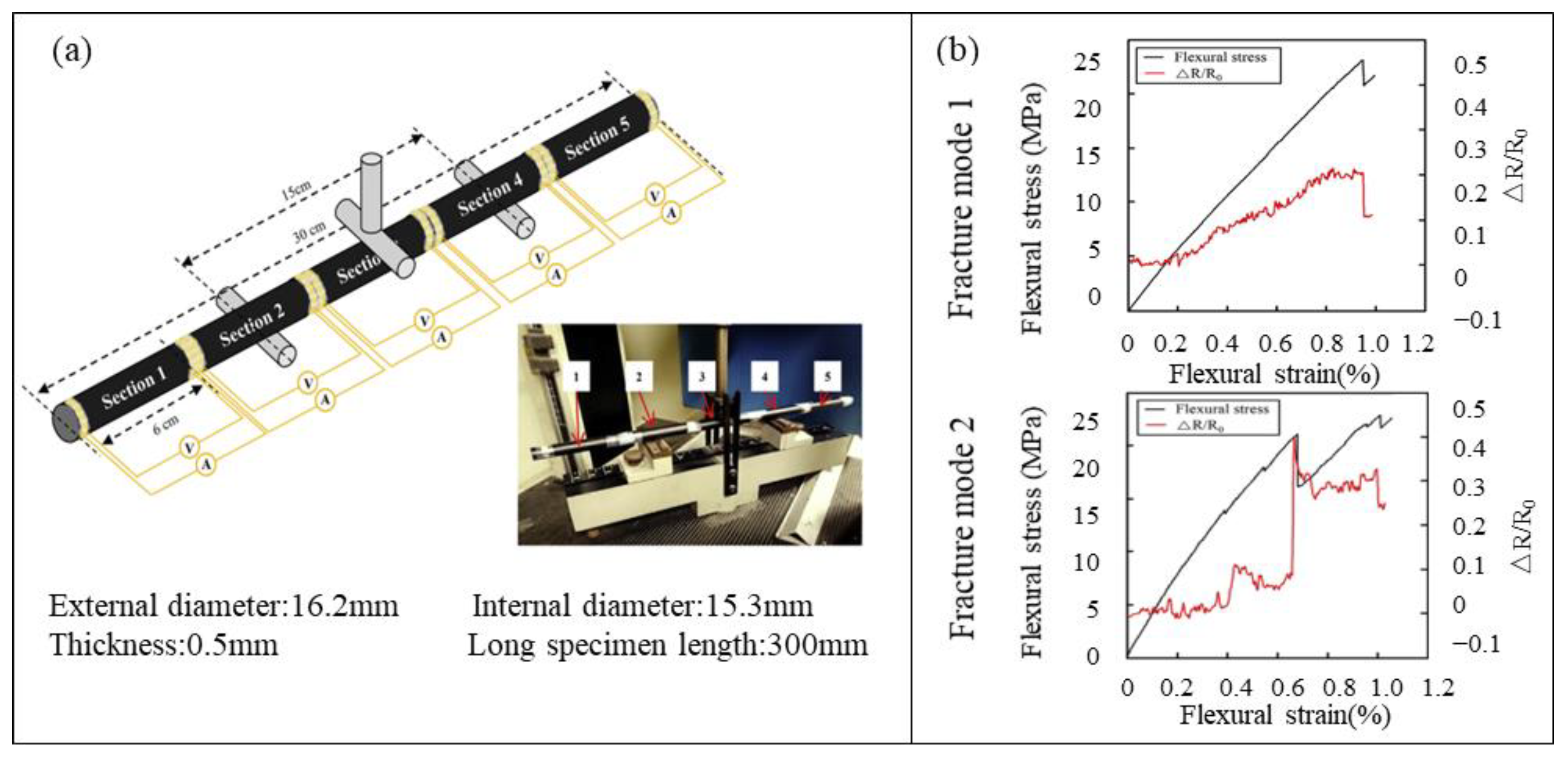
In addition, FRP materials are usually classified as carbon-FRP (CFRP) and glass-FRP (GFRP). Nag-Chowdhury et al. fabricated a nano-composite quantum resistance sensor, which can be embedded and distributed in GFRP without affecting its mechanical properties. Fatigue tests illustrated that the closing/reopening and expansion of cracks along with the increase in cyclic loading led to damage accumulation of the GFRP material [150]. This sensor was able to track the strain and damage of the GFRP structure in both the elastic and plastic stages until it failed. On the other hand, electrical resistance measurements were applied for the fracture detection and failure prediction of cylindrical-type CFRP composites (Figure 11a). Results showed that longitudinal cracks of the CFRP cylinder were easily detected according to the signal jump of the resistivity-change ratio [159]. Moreover, the resistance-variation graph can be used to distinguish different fracture modes of the CFRP cylinder (Figure 11b).
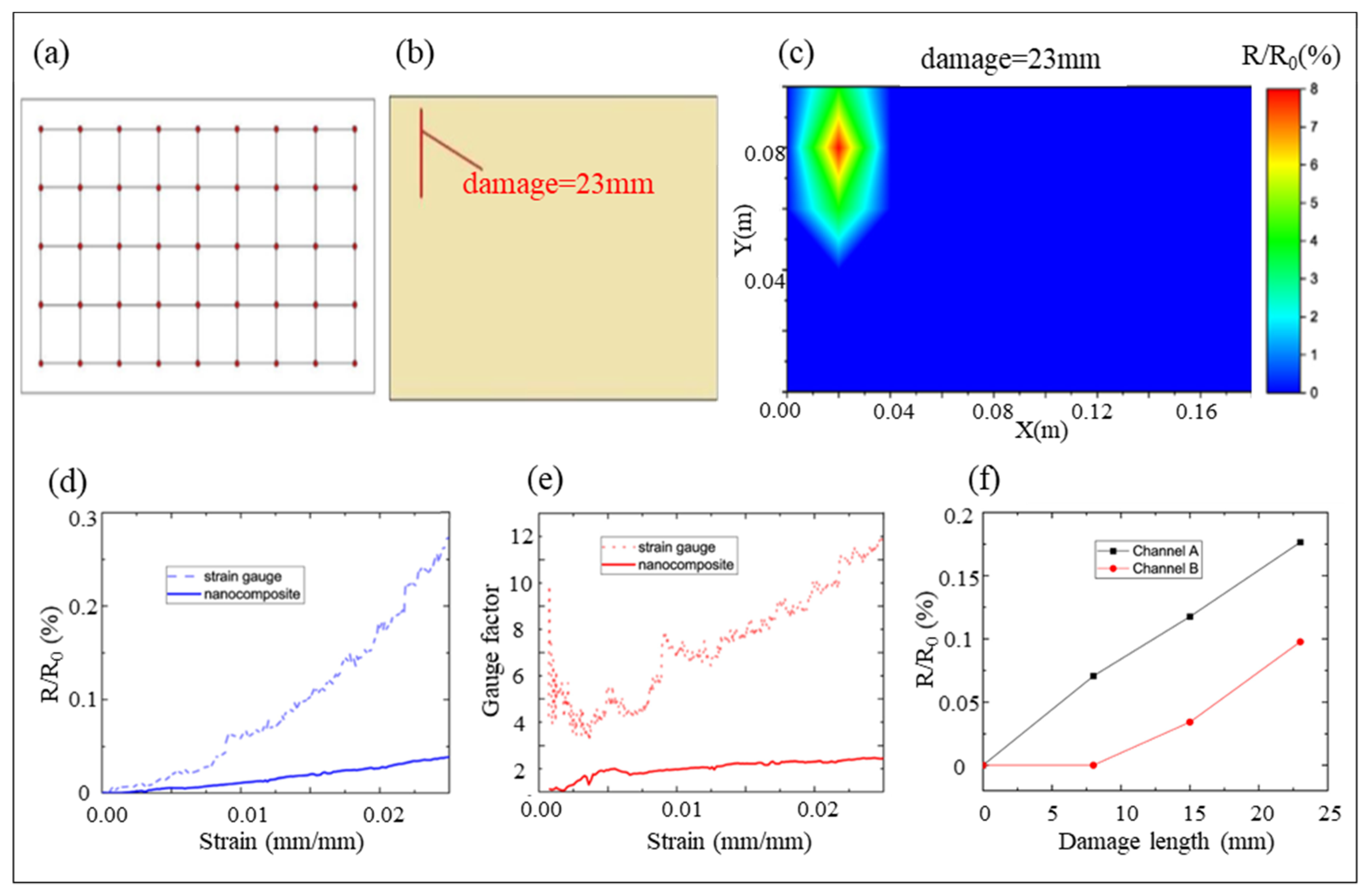
In addition, CNT–epoxy coatings were developed for large-area damage detection in GFRP-based structures [53]. A multichannel electrode network was integrated on the coating to build a two-dimensional map for multi-damage detection of a GFRP structure (Figure 12a). Figure 12c illustrates the location and quantification of a 23 mm long crack according to the normalized resistance variation of the sensing network. As indicated from Figure 12d–e, the CNT–epoxy coating showed a varied GF from 3 to 12 within a 0~2.5% strain range, which is higher than the tradition foil sensor. The excellent sensitivity was attributed to the susceptible destruction and reconstruction processes of the conductive networks in the ultrathin coating. In addition, the multichannel electrode network detected the damage length with a sensitivity of 0.007%/mm (Figure 12f).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 4.
Piezoresistive strain sensors for civil SHM.
| Ref. | Materials Filler + Substrate | Maximum Detectable Range | Gauge Factor (Sensing Range) | Linearity (Strain Range) | Cyclic Times for Durability |
|---|---|---|---|---|---|
| [137] | Carbon Particle + PI | 0.6% | 25 | Near linear (ε < 0.6%) | |
| [138] | MWCNTs + Resins | 20% | 2.6 (ε < 1%) | Linear (ε < 1%) | 10 (ε < 1%) |
| [139] | MWCNTs + Epoxy | 0.14% | Linear (ε < 0.14%) | 1000 (ε < 0.14%) | |
| [140] | CB + Epoxy | 1.2% | 11~42 (Depend on filler content) | Nonlinear | |
| [142] | MWCNTs + PDMS | 50% | 1.5~6 | Nonlinear | |
| [143] | rGO/Cellulose nanofiber + Epoxy | 55% | 34~71 | Nonlinear | 100 (ε < 4%) |
| [144] | RGO-CNF + WEP | 4% | 16~52 (Depend on filler content) | Near linear (ε < 4%) | 4 (ε < 4%) |
| [146] | Gold nanoparticles + PDMS | 30% | 0.04 | Near linear | |
| [151] | MWCNT/FRP + Epoxy | 1.23% | 5~6 | Nonlinear | |
| [154] | CNTs/Glass fiber + Epoxy | 1.2% | 2.25 | Linear (0.5% < ε < 1%) | |
| [155] | MWCNTs/Glass Fibers + Epoxy | 2.5% | 3.8 (ε < 0.2%) | Near linear (ε < 0.2%) | |
| [156] | CNT/Glass Fibers + Epoxy | 2.2% | Nonlinear | ||
| [157] | Graphene nanoplate + Glass fiber | 2% | 840~16,400 | Nonlinear | |
| [158] | Carbon fibers + Epoxy | 3.5% | 10 | ||
| [159] | Carbon fibers + Epoxy | 1% | 0~0.25 | Nonlinear | |
| [53] | CNT + Epoxy resin | 2.5% | 3~12 | Nonlinear |
Last but not least, Table 4 gives a summary of the aforementioned piezoresistive strain sensors used for the SHM of civil structures. As shown in the third column of Table 4, the detectable strain ranges of most of the sensors are below 5%, which is much smaller than the piezoresistive sensors shown in Table 2 and Table 3. This is because the elastic and recoverable strain range of civil structures is usually below 1~3%, according to the construction materials. For instance, the FRP-based structure will crack near a 1% strain (Figure 11b). Hence, the mission of the strain sensor changed to detect cracks or bulking rather than measure strain when the structural strain is beyond the recoverable range. Nonetheless, little consideration has been paid to the long-term durability of the piezoresistive sensors, as indicated from the blanks in the last column of Table 4.
5.4. Challenges and Prospects of Large-Scale Application
Although carbon-type composite materials have shown many advantages for sensing damage in SHM, there are still challenges to realize large-scale application of carbon-based strain sensors. For instance, the high-purity CNTs and their corresponding dispersion have high cost, and the blast risk of CNTs brings safety concerns [67,68]. In addition, a tedious fabrication process hinders the application of graphene-based strain sensors [160]. In fact, most current fabrication techniques of carbon-type strain sensors are still in their prototype stage. Moreover, practical application of the proposed piezoresistive strain sensors requires an overall integrated system, which includes sensors, power supplement, data analysis and processing, wireless data transmission and a remote operation system [93]. Besides, the integrated sensing system should have robustness and high reliability against the performance degradation in long-term monitoring [128]. In terms of the self-healing flexible sensor, there are still challenges for simple, economical and scale-up fabrication strategies. Another important challenge is to keep the strain sensors maintaining good performance even after multiple healings [22].
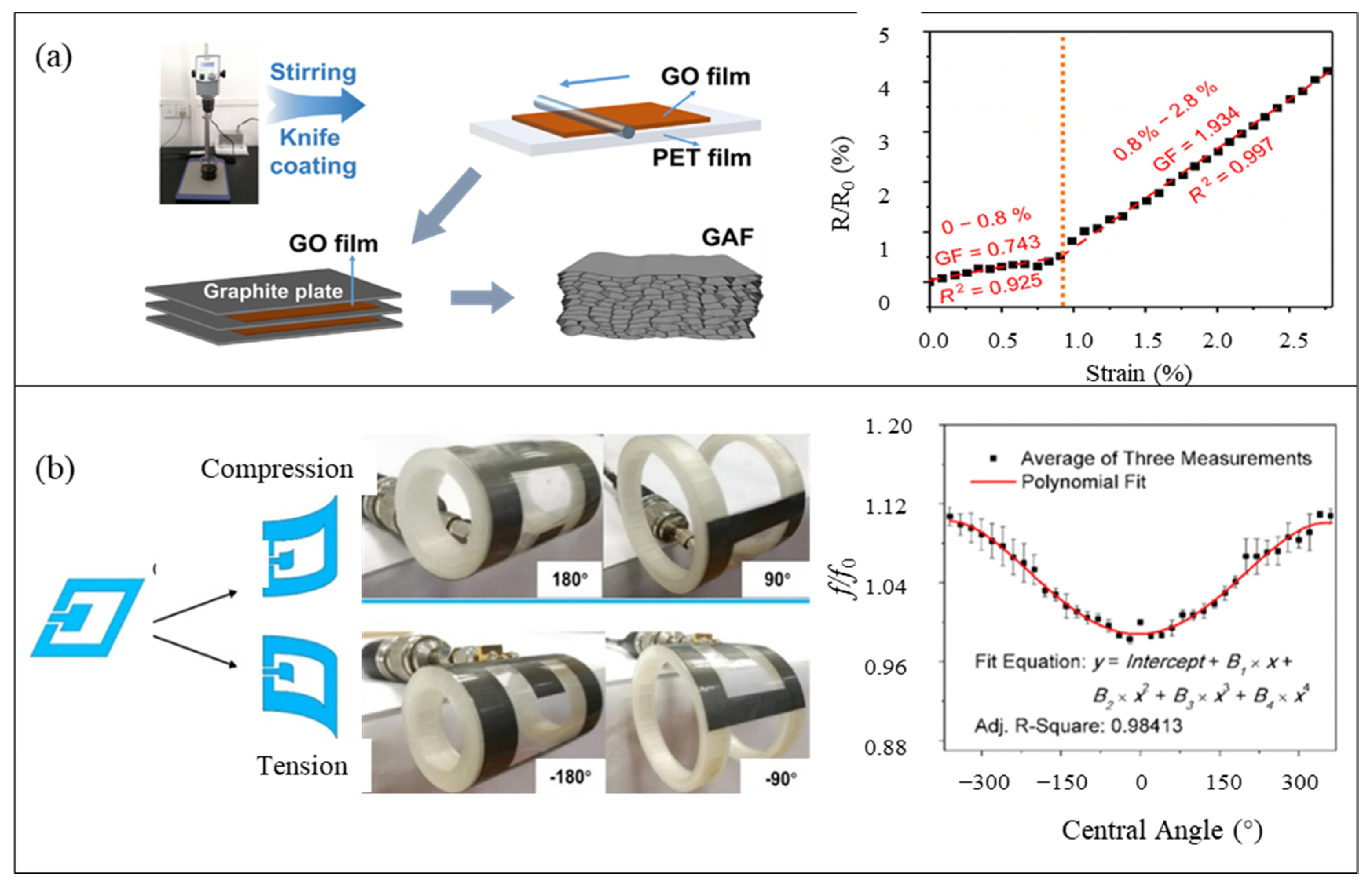
Furthermore, researchers explored novel ideas of carbon-type sensors using pure macro-graphene, which showed potentials for field application and scale-up production [161]. Wang et al. reported a pure graphene-assembled film (GAF), which can be directly used as a strain sensor without flexible substrates [160]. The GAF significantly simplifies the fabrication process in comparison with most reported strain sensors, and mass production of this material has already been realized. Besides, the resistance of the film remains unchanged with increasing temperatures from 20 °C to 100 °C, indicating a good thermal stability (Figure 13a).
On the other hand, the GAF, which was originally used as a wireless antenna with a flexible radio frequency, can also be used as a wireless strain sensor via resolving the signal variation resulting from the deformation of the GAF antenna [162]. In their work, the high-conductive GAF has advantages of high flexibility and excellent mechanical stability. As a result, a flexible GAF-antenna-based wireless strain sensor was achieved, which has high GF of 35 in measuring tensile bending and compressive bending (Figure 13b). Moreover, a two-dimensional wireless displacement sensor was developed based on a bilayer graphene-based frequency selective surface [163]. A two-dimensional displacement measurement with high accuracy was carried out based on the variation trend of the resonant frequencies of the top and bottom layers of the sensor. One more benefit is that the bilayer graphene material shows outstanding mechanical and chemical stability in complicated environments, indicating long-term-use prospects.
5.5. Strategy for Selection of Piezoresistive Sensor in Civil SHM
Aiming for the requirement of deformation monitoring and damage detection of civil structures, one of the primary targets of this review is to provide appropriate strategies for the selection and improvement of flexible piezoresistive strain sensors. Note that the strain level of civil structures is usually below 1% under normal loading and ambient situations, and large strain or cracks will appear because of long-term plastic deformation and extreme loadings. Therefore, the flexible piezoresistive sensor should have not only enough sensitivity and linearity to measure small strains (ε < 1%) but also a wide strain range and long-term durability to sense large strains and damages. In addition, the selection principle should be comprehensive by considering different aspects such as sensitivity, feasibility and detection performance [22]. To name a few, some strategies are concluded as follows:
First, carbonaceous materials are preferable to be chosen as conductive fillers since they have better piezoresistive properties and lower production costs than metallic materials. Integration of different carbonaceous materials might be able to produce better performance. Second, the sensors proposed in references [138,144] are promising examples for civil SHM because of their balanced performances of relatively high GF, large sensing range and good linearity. The outstanding compatibility of multiple performances is attributed to not only the integration of complementary conductive fillers but also the reinforcement of the substrate. Besides, their feasibility for scale-up fabrication and long-term durability is suggested for further investigation. After that, the sensing performances can be improved via the methods presented in Chapter 4, such as utilizing hybrid reinforced materials or micro-structures. By contrast, a new form of graphene material, namely, the pure GAF, has potential because of its easy fabrication and long-term stability. However, the sensitivity of the pure GAF in a small strain range (ε< 1%) should be further enhanced.
6. Conclusions
This study presented a literature review of flexible piezoresistive strain sensors in several aspects, including typical piezoresistive mechanisms, elaboration of sensor materials, optimization of sensor performances, applications and prospects in civil SHM. The conclusions are summarized as follows:
The four common piezoresistive mechanisms successively predominate the electrical conductivity of the strain sensor within their respective working strain levels. Each mechanism corresponds with a different sensing parameter. The proportion of tunneling resistance in total resistance determines the sensitivity, while the proportion of interface contact resistance governs the linearity. Thus, the sensing performances of piezoresistive sensors are highly related to the morphology of the conductive network.
Selections of conductive materials and substrate materials are crucial to electrical conductivity, sensing properties and stretchable range in flexible piezoresistive sensors. Hybrid conductive materials usually perform better than single-type materials because the conductive networks and the mechanical properties are improved by the complementation of different materials.
The sensing performances of flexible sensors can be further enhanced through strategies such as the proper combination of different types of conductive fillers, strong bonding and cooperative deformation between the fillers and the substrates, and assistances of microcracks or microstructure. Nevertheless, the incompatibility of high sensitivity, high stretchability, satisfactory linearity and durability is still a great challenge in developing high-performance strain sensors.
Applications of piezoresistive strain sensors in civil SHM mainly focused on tracking concrete cracks and detecting damage in FRP structures. Feasible strategies for selecting suitable piezoresistive strain sensors for civil SHM are provided. Although carbon-based flexible piezoresistive sensors have been well-developed in recent years, challenges such as complex fabrication, performance degradation during long-term use and overall integrated systems still exist for further field application. More attempts are required to develop advanced piezoresistive sensors targeted for civil SHM.
Author Contributions
Conceptualization, S.W. and H.Z.; Data curation, Z.Z.; Investigation, H.Y.; Methodology, K.G.; Resources, S.W.; Supervision, H.Z.; Visualization, T.P.; Writing—original draft, K.G. and Z.Z.; Writing—review & editing, K.G. All authors have read and agreed to the published version of the manuscript.
Funding
The authors are grateful for the financial support from the National Key R&D Program of China (Grant No.: 2021YFF0501001), the National Natural Science Foundation of China (Grant Nos.: 51922046 and 51838006), Natural Science Foundation of Hubei Province: 2020CFA047, and the Research Fund of China Railway Siyuan Survey and Design Group Co., Ltd. (contract numbers: 2021K085 and 2020D006). The findings and opinions expressed here, however, are those of the authors alone; they do not necessarily reflect the views of the sponsors.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Brownjohn, J.M. Structural health monitoring of civil infrastructure. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2007, 365, 589–622. [Google Scholar] [CrossRef]
- Lynch, J.P. An overview of wireless structural health monitoring for civil structures. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2007, 365, 345–372. [Google Scholar] [CrossRef]
- Lu, X.; Guan, H.; Sun, H.; Li, Y.; Zheng, Z.; Fei, Y.; Yang, Z.; Zuo, L. A preliminary analysis and discussion of the condominium building collapse in surfside, Florida, US, June 24, 2021. Front. Struct. Civ. Eng. 2021, 15, 1097–1110. [Google Scholar] [CrossRef]
- Bao, Y.Q.; Chen, Z.C.; Wei, S.Y.; Xu, Y.; Tang, Z.Y.; Li, H. The State of the Art of Data Science and Engineering in Structural Health Monitoring. Engineering 2019, 5, 234–242. [Google Scholar] [CrossRef]
- Wu, R.T.; Jahanshahi, M.R. Data fusion approaches for structural health monitoring and system identification: Past, present, and future. Struct. Health Monit. 2020, 19, 552–586. [Google Scholar] [CrossRef]
- Su, J.Z.; Xia, Y.; Weng, S. Review on field monitoring of high-rise structures. Struct. Control. Health Monit. 2020, 27, e2629. [Google Scholar] [CrossRef]
- Moon, H.S.; Ok, S.; Chun, P.J.; Lim, Y.M. Artificial Neural Network for Vertical Displacement Prediction of a Bridge from Strains (Part 1): Girder Bridge under Moving Vehicles. Appl. Sci. 2019, 9, 2881. [Google Scholar] [CrossRef]
- Zhu, H.P.; Gao, K.; Xia, Y.; Gao, F.; Weng, S.; Sun, Y.; Hu, Q. Multi-rate data fusion for dynamic displacement measurement of beam-like supertall structures using acceleration and strain sensors. Struct. Health Monit. 2020, 19, 520–536. [Google Scholar] [CrossRef]
- Jang, H.L.; Han, D.H.; Hwang, M.Y.; Kang, D.; Kang, L.H. Displacement, Strain and Failure Estimation for Multi-Material Structure Using the Displacement-Strain Transformation Matrix. Materials 2020, 13, 190. [Google Scholar] [CrossRef]
- Liu, Q.; Chen, J.; Li, Y.; Shi, G. High-Performance Strain Sensors with Fish-Scale-Like Graphene-Sensing Layers for Full-Range Detection of Human Motions. ACS Nano 2016, 10, 7901–7906. [Google Scholar] [CrossRef]
- Zhang, H.; Bilotti, E.; Peijs, T. The use of carbon nanotubes for damage sensing and structural health monitoring in laminated composites: A review. Nanocomposites 2015, 1, 167–184. [Google Scholar] [CrossRef]
- Trung, T.Q.; Lee, N.E. Flexible and Stretchable Physical Sensor Integrated Platforms for Wearable Human-Activity Monitoring and Personal Healthcare. Adv. Mater. 2016, 28, 4338–4372. [Google Scholar] [CrossRef]
- Wang, X.W.; Liu, Z.; Zhang, T. Flexible Sensing Electronics for Wearable/Attachable Health Monitoring. Small 2017, 13, 1602790. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Ma, X.H.; Hao, Y. Electronic Devices for Human-Machine Interfaces. Adv. Mater. Interfaces 2017, 4, 1600709. [Google Scholar] [CrossRef]
- Park, J.; Lee, Y.; Ha, M.; Cho, S.; Ko, H. Micro/nanostructured surfaces for self-powered and multifunctional electronic skins. J. Mater. Chem. B 2016, 4, 2999–3018. [Google Scholar] [CrossRef] [PubMed]
- United Nations Environment Programme. Global Status Report for Buildings and Construction; Global Alliance for Building and Construction: Paris, France, 2021. [Google Scholar]
- Li, H.-N.; Ren, L.; Jia, Z.-G.; Yi, T.-H.; Li, D.-S. State-of-the-art in structural health monitoring of large and complex civil infrastructures. J. Civ. Struct. Health 2015, 6, 3–16. [Google Scholar] [CrossRef]
- Kranabitl, P.; Faustmann, C.; Hick, H. Decision Making for Sustainable Technical Applications with the SMH Approach. Sustainability 2021, 13, 8702. [Google Scholar] [CrossRef]
- Fan, J.H.; Lu, X.Y.; Cao, W.W. Phase transitions and piezoelectricity enhancement around MC → O phase transition in PMN-0.34PT single crystals. J. Alloys Compd. 2020, 835, 155171. [Google Scholar] [CrossRef]
- Yang, J.; Luo, S.; Zhou, X.; Li, J.L.; Fu, J.T.; Yang, W.D.; Wei, D.P. Flexible, Tunable, and Ultrasensitive Capacitive Pressure Sensor with Microconformal Graphene Electrodes. ACS Appl. Mater. Interfaces 2019, 11, 14997–15006. [Google Scholar] [CrossRef]
- Luo, N.Q.; Dai, W.X.; Li, C.L.; Zhou, Z.Q.; Lu, L.Y.; Poon, C.C.Y.; Chen, S.C.; Zhang, Y.T.; Zhao, N. Flexible Piezoresistive Sensor Patch Enabling Ultralow Power Cuffless Blood Pressure Measurement. Adv. Funct. Mater. 2016, 26, 1178–1187. [Google Scholar] [CrossRef]
- Nauman, S. Piezoresistive Sensing Approaches for Structural Health Monitoring of Polymer Composites—A Review. Eng 2021, 2, 197–226. [Google Scholar] [CrossRef]
- Duan, L.Y.; D’hooge, D.R.; Cardon, L. Recent progress on flexible and stretchable piezoresistive strain sensors: From design to application. Prog. Mater. Sci. 2020, 114, 100617. [Google Scholar] [CrossRef]
- Zeng, W.; Shu, L.; Li, Q.; Chen, S.; Wang, F.; Tao, X.M. Fiber-Based Wearable Electronics: A Review of Materials, Fabrication, Devices, and Applications. Adv. Mater. 2014, 26, 5310–5336. [Google Scholar] [CrossRef] [PubMed]
- Gao, F.; Zhou, H.; Liang, H.J.; Weng, S.; Zhu, H.P. Structural deformation monitoring and numerical simulation of a supertall building during construction stage. Eng. Struct. 2020, 209, 110033. [Google Scholar] [CrossRef]
- Su, J.Z.; Xia, Y.; Zhu, L.D.; Zhu, H.P.; Ni, Y.Q. Typhoon- and temperature-induced quasi-static responses of a supertall structure. Eng. Struct. 2017, 143, 91–100. [Google Scholar] [CrossRef]
- Chen, Z.S.; Zhou, X.; Wang, X.; Dong, L.L.; Qian, Y.H. Deployment of a Smart Structural Health Monitoring System for Long-Span Arch Bridges: A Review and a Case Study. Sensors 2017, 17, 2151. [Google Scholar] [CrossRef]
- Xia, Y.; Ni, Y.Q.; Zhang, P.; Liao, W.Y.; Ko, J.M. Stress Development of a Supertall Structure during Construction: Field Monitoring and Numerical Analysis. Comput. Aided Civ. Infrastruct. Eng. 2011, 26, 542–559. [Google Scholar] [CrossRef]
- Gao, K.; Chen, Z.D.; Weng, S.; Zhu, H.P.; Wu, L.Y. Detection of multi-type data anomaly for structural health monitoring using pattern recognition neural network. Smart Struct. Syst. 2022, 29, 129–140. [Google Scholar] [CrossRef]
- Naghashpour, A.; Hoa, S.V. A technique for real-time detecting, locating, and quantifying damage in large polymer composite structures made of carbon fibers and carbon nanotube networks. Struct. Health Monit. 2015, 14, 35–45. [Google Scholar] [CrossRef]
- Qiu, D.; Peng, L.; Yi, P.; Lai, X. A micro contact model for electrical contact resistance prediction between roughness surface and carbon fiber paper. Int. J. Mech. Sci. 2017, 124–125, 37–47. [Google Scholar] [CrossRef]
- Higashisaka, T.; Nagato, K.; Tomizawa, M.; Tanaka, E.; Watanabe, H.; Nakao, M. Small and sensitive force sensors based on contact resistance. Microelectron. Eng. 2019, 216, 111058. [Google Scholar] [CrossRef]
- Gao, L.; Zhu, C.X.; Li, L.; Zhang, C.W.; Liu, J.H.; Yu, H.D.; Huang, W. All Paper-Based Flexible and Wearable Piezoresistive Pressure Sensor. ACS Appl. Mater. Interfaces 2019, 11, 25034–25042. [Google Scholar] [CrossRef] [PubMed]
- Doshi, S.M.; Thostenson, E.T. Thin and Flexible Carbon Nanotube-Based Pressure Sensors with Ultrawide Sensing Range. ACS Sens. 2018, 3, 1276–1282. [Google Scholar] [CrossRef]
- Hu, N.; Karube, Y.; Yan, C.; Masuda, Z.; Fukunaga, H. Tunneling effect in a polymer/carbon nanotube nanocomposite strain sensor. Acta Mater. 2008, 56, 2929–2936. [Google Scholar] [CrossRef]
- Park, J.; Lee, Y.; Hong, J.; Ha, M.; Jung, Y.D.; Lim, H.; Kim, S.Y.; Ko, H. Giant Tunneling Piezoresistance of Composite Elastomers with Interlocked Microdome Arrays for Ultrasensitive and Multimodal Electronic Skins. ACS Nano 2014, 8, 4689–4697. [Google Scholar] [CrossRef] [PubMed]
- Yang, H.; Yuan, L.; Yao, X.F.; Fang, D.N. Piezoresistive response of graphene rubber composites considering the tunneling effect. J. Mech. Phys. Solids 2020, 139, 103943. [Google Scholar] [CrossRef]
- Haniff, M.A.S.M.; Hafiz, S.M.; Huang, N.M.; Rahman, S.A.; Wahid, K.A.A.; Syono, M.I.; Azid, I.A. Piezoresistive Effect in Plasma-Doping of Graphene Sheet for High-Performance Flexible Pressure Sensing Application. ACS Appl. Mater. Interfaces 2017, 9, 15192–15201. [Google Scholar] [CrossRef] [PubMed]
- Pereira, V.M.; Castro Neto, A.H.; Peres, N.M.R. Tight-binding approach to uniaxial strain in graphene. Phys. Rev. B 2009, 80, 045401. [Google Scholar] [CrossRef]
- Lipomi, D.J.; Lee, J.A.; Vosgueritchian, M.; Tee, B.C.K.; Bolander, J.A.; Bao, Z.A. Electronic Properties of Transparent Conductive Films of PEDOT:PSS on Stretchable Substrates. Chem. Mater. 2012, 24, 373–382. [Google Scholar] [CrossRef]
- Chen, Z.; Ming, T.; Goulamaly, M.M.; Yao, H.M.; Nezich, D.; Hempel, M.; Hofmann, M.; Kong, J. Enhancing the Sensitivity of Percolative Graphene Films for Flexible and Transparent Pressure Sensor Arrays. Adv. Funct. Mater. 2016, 26, 5061–5067. [Google Scholar] [CrossRef]
- Amjadi, M.; Kyung, K.U.; Park, I.; Sitti, M. Stretchable, Skin-Mountable, and Wearable Strain Sensors and Their Potential Applications: A Review. Adv. Funct. Mater. 2016, 26, 1678–1698. [Google Scholar] [CrossRef]
- Chen, S.; Wei, Y.; Wei, S.M.; Lin, Y.; Liu, L. Ultrasensitive Cracking-Assisted Strain Sensors Based on Silver Nanowires/Graphene Hybrid Particles. ACS Appl. Mater. Interfaces 2016, 8, 25563–25570. [Google Scholar] [CrossRef]
- Park, B.; Kim, J.; Kang, D.; Jeong, C.; Kim, K.S.; Kim, J.U.; Yoo, P.J.; Kim, T.I. Dramatically Enhanced Mechanosensitivity and Signal-to-Noise Ratio of Nanoscale Crack-Based Sensors: Effect of Crack Depth. Adv. Mater. 2016, 28, 8130–8137. [Google Scholar] [CrossRef] [PubMed]
- Lee, C.J.; Park, K.H.; Han, C.J.; Oh, M.S.; You, B.; Kim, Y.S.; Kim, J.W. Crack-induced Ag nanowire networks for transparent, stretchable, and highly sensitive strain sensors. Sci. Rep. 2017, 7, 7959. [Google Scholar] [CrossRef]
- Kang, D.; Pikhitsa, P.V.; Choi, Y.W.; Lee, C.; Shin, S.S.; Piao, L.F.; Park, B.; Suh, K.Y.; Kim, T.I.; Choi, M. Ultrasensitive mechanical crack-based sensor inspired by the spider sensory system. Nature 2014, 516, 222–226. [Google Scholar] [CrossRef] [PubMed]
- Hoang, P.T.; Salazar, N.; Porkka, T.N.; Joshi, K.; Liu, T.; Dickens, T.J.; Yu, Z.B. Engineering Crack Formation in Carbon Nanotube-Silver Nanoparticle Composite Films for Sensitive and Durable Piezoresistive Sensors. Nanoscale Res. Lett. 2016, 11, 422. [Google Scholar] [CrossRef]
- Zhou, J.; Yu, H.; Xu, X.Z.; Han, F.; Lubineau, G. Ultrasensitive, Stretchable Strain Sensors Based on Fragmented Carbon Nanotube Papers. ACS Appl. Mater. Interfaces 2017, 9, 4835–4842. [Google Scholar] [CrossRef]
- Liao, X.Q.; Zhang, Z.; Kang, Z.; Gao, F.F.; Liao, Q.L.; Zhang, Y. Ultrasensitive and stretchable resistive strain sensors designed for wearable electronics. Mater. Horiz. 2017, 4, 502–510. [Google Scholar] [CrossRef]
- Amjadi, M.; Turan, M.; Clementson, C.P.; Sitti, M. Parallel Microcracks-based Ultrasensitive and Highly Stretchable Strain Sensors. ACS Appl. Mater. Interfaces 2016, 8, 5618–5626. [Google Scholar] [CrossRef]
- Jin, H.; Abu-Raya, Y.S.; Haick, H. Advanced Materials for Health Monitoring with Skin-Based Wearable Devices. Adv. Healthc. Mater. 2017, 6, 1700024. [Google Scholar] [CrossRef]
- Melnykowycz, M.; Tschudin, M.; Clemens, F. Piezoresistive Soft Condensed Matter Sensor for Body-Mounted Vital Function Applications. Sensors 2016, 16, 326. [Google Scholar] [CrossRef] [PubMed]
- Sanchez-Romate, X.F.; Moriche, R.; Jimenez-Suarez, A.; Sanchez, M.; Prolongo, S.G.; Guemes, A.; Urena, A. Highly sensitive strain gauges with carbon nanotubes: From bulk nanocomposites to multifunctional coatings for damage sensing. Appl. Surf. Sci. 2017, 424, 213–221. [Google Scholar] [CrossRef]
- Li, X.; Zhang, R.; Yu, W.; Wang, K.; Wei, J.; Wu, D.; Cao, A.; Li, Z.; Cheng, Y.; Zheng, Q. Stretchable and highly sensitive graphene-on-polymer strain sensors. Sci. Rep. 2012, 2, 870. [Google Scholar] [CrossRef] [PubMed]
- Huang, C.B.; Witomska, S.; Aliprandi, A.; Stoeckel, M.A.; Bonini, M.; Ciesielski, A.; Samori, P. Molecule-Graphene Hybrid Materials with Tunable Mechanoresponse: Highly Sensitive Pressure Sensors for Health Monitoring. Adv. Mater. 2019, 31, e1804600. [Google Scholar] [CrossRef] [PubMed]
- Schlicke, H.; Kunze, S.; Rebber, M.; Schulz, N.; Riekeberg, S.; Trieu, H.K.; Vossmeyer, T. Cross-Linked Gold Nanoparticle Composite Membranes as Highly Sensitive Pressure Sensors. Adv. Funct. Mater. 2020, 30, 2003381. [Google Scholar] [CrossRef]
- Schlicke, H.; Rebber, M.; Kunze, S.; Vossmeyer, T. Resistive pressure sensors based on freestanding membranes of gold nanoparticles. Nanoscale 2016, 8, 183–186. [Google Scholar] [CrossRef]
- Tang, Y.; Gong, S.; Chen, Y.; Yap, L.W.; Cheng, W.L. Manufacturable Conducting Rubber Ambers and Stretchable Conductors from Copper Nanowire Aerogel Monoliths. ACS Nano 2014, 8, 5707–5714. [Google Scholar] [CrossRef]
- Gong, S.; Schwalb, W.; Wang, Y.W.; Chen, Y.; Tang, Y.; Si, J.; Shirinzadeh, B.; Cheng, W.L. A wearable and highly sensitive pressure sensor with ultrathin gold nanowires. Nat. Commun. 2014, 5, 3132. [Google Scholar] [CrossRef]
- Li, Y.X.; Han, D.Y.; Jiang, C.J.; Xie, E.Q.; Han, W.H. A Facile Realization Scheme for Tactile Sensing with a Structured Silver Nanowire-PDMS Composite. Adv. Mater. Technol. 2019, 4, 1800504. [Google Scholar] [CrossRef]
- Lee, Y.; Kim, J.; Joo, H.; Raj, M.S.; Ghaffari, R.; Kim, D.H. Wearable Sensing Systems with Mechanically Soft Assemblies of Nanoscale Materials. Adv. Mater. Technol. 2017, 2, 1700053. [Google Scholar] [CrossRef]
- Zhu, Y.; Hu, Y.G.; Zhu, P.L.; Zhao, T.; Liang, X.W.; Sun, R.; Wong, C.P. Enhanced oxidation resistance and electrical conductivity copper nanowires-graphene hybrid films for flexible strain sensors. New J. Chem. 2017, 41, 4950–4958. [Google Scholar] [CrossRef]
- Wu, J.J.; Li, H.Q.; Lai, X.J.; Chen, Z.H.; Zeng, X.R. Conductive and superhydrophobic F-rGO@CNTs/chitosan aerogel for piezoresistive pressure sensor. Chem. Eng. J. 2020, 386, 123998. [Google Scholar] [CrossRef]
- Azhari, S.; Yousefi, A.T.; Tanaka, H.; Khajeh, A.; Kuredemus, N.; Bigdeli, M.M.; Hamidon, M.N. Fabrication of piezoresistive based pressure sensor via purified and functionalized CNTs/PDMS nanocomposite: Toward development of haptic sensors. Sens. Actuators A Phys. 2017, 266, 158–165. [Google Scholar] [CrossRef]
- Wang, X.; Tao, X.M.; So, R.C.H.; Shu, L.; Yang, B.; Li, Y. Monitoring elbow isometric contraction by novel wearable fabric sensing device. Smart Mater. Struct. 2016, 25, 125022. [Google Scholar] [CrossRef]
- Wang, F.; Liu, S.; Shu, L.; Tao, X.M. Low-dimensional carbon based sensors and sensing network for wearable health and environmental monitoring. Carbon 2017, 121, 353–367. [Google Scholar] [CrossRef]
- Slobodian, P.; Riha, P.; Saha, P. A highly-deformable composite composed of an entangled network of electrically-conductive carbon-nanotubes embedded in elastic polyurethane. Carbon 2012, 50, 3446–3453. [Google Scholar] [CrossRef]
- Duan, L.Y.; Fu, S.R.; Deng, H.; Zhang, Q.; Wang, K.; Chen, F.; Fu, Q. The resistivity-strain behavior of conductive polymer composites: Stability and sensitivity. J. Mater. Chem. A 2014, 2, 17085–17098. [Google Scholar] [CrossRef]
- Shi, J.D.; Li, X.M.; Cheng, H.Y.; Liu, Z.J.; Zhao, L.Y.; Yang, T.T.; Dai, Z.H.; Cheng, Z.G.; Shi, E.Z.; Yang, L.; et al. Graphene Reinforced Carbon Nanotube Networks for Wearable Strain Sensors. Adv. Funct. Mater. 2016, 26, 2078–2084. [Google Scholar] [CrossRef]
- Haniff, M.A.S.M.; Hafiz, S.M.; Wahid, K.A.A.; Endut, Z.; Lee, H.W.; Bien, D.C.S.; Azid, I.A.; Abdullah, M.Z.; Huang, N.M.; Rahman, S.A. Piezoresistive effects in controllable defective HFTCVD graphene-based flexible pressure sensor. Sci. Rep. 2015, 5, 14751. [Google Scholar] [CrossRef]
- Mattevi, C.; Kim, H.; Chhowalla, M. A review of chemical vapour deposition of graphene on copper. J. Mater. Chem. 2011, 21, 3324–3334. [Google Scholar] [CrossRef]
- Hao, D.P.; Yang, R.X.; Yi, N.; Cheng, H.Y. Highly sensitive piezoresistive pressure sensors based on laser-induced graphene with molybdenum disulfide nanoparticles. Sci. China Technol. Sci. 2021, 64, 2408–2414. [Google Scholar] [CrossRef]
- Ho, M.D.; Ling, Y.; Yap, L.W.; Wang, Y.; Dong, D.; Zhao, Y.; Cheng, W. Percolating Network of Ultrathin Gold Nanowires and Silver Nanowires toward “Invisible” Wearable Sensors for Detecting Emotional Expression and Apexcardiogram. Adv. Funct. Mater. 2017, 27, 1700845. [Google Scholar] [CrossRef]
- Lin, L.; Liu, S.Y.; Zhang, Q.; Li, X.Y.; Ji, M.Z.; Deng, H.; Fu, Q. Towards Tunable Sensitivity of Electrical Property to Strain for Conductive Polymer Composites Based on Thermoplastic Elastomer. ACS Appl. Mater. Interfaces 2013, 5, 5815–5824. [Google Scholar] [CrossRef] [PubMed]
- Ning, N.Y.; Wang, S.S.; Zhang, L.Q.; Lu, Y.L.; Tian, M.; Chan, T.W. Synchronously Tailoring Strain Sensitivity and Electrical Stability of Silicone Elastomer Composites by the Synergistic Effect of a Dual Conductive Network. Polymers 2016, 8, 100. [Google Scholar] [CrossRef]
- Ke, K.; Potschke, P.; Wiegand, N.; Krause, B.; Voit, B. Tuning the Network Structure in Poly(vinylidene fluoride)/Carbon Nanotube Nanocomposites Using Carbon Black: Toward Improvements of Conductivity and Piezoresistive Sensitivity. ACS Appl. Mater. Interfaces 2016, 8, 14190–14199. [Google Scholar] [CrossRef]
- Liu, H.; Gao, J.C.; Huang, W.J.; Dai, K.; Zheng, G.Q.; Liu, C.T.; Shen, C.Y.; Yan, X.R.; Guo, J.; Guo, Z.H. Electrically conductive strain sensing polyurethane nanocomposites with synergistic carbon nanotubes and graphene bifillers. Nanoscale 2016, 8, 12977–12989. [Google Scholar] [CrossRef]
- Gao, Y.J.; Ota, H.; Schaler, E.W.; Chen, K.; Zhao, A.; Gao, W.; Fahad, H.M.; Leng, Y.G.; Zheng, A.Z.; Xiong, F.R.; et al. Wearable Microfluidic Diaphragm Pressure Sensor for Health and Tactile Touch Monitoring. Adv. Mater. 2017, 29, 1701985. [Google Scholar] [CrossRef]
- Lee, J.; Lim, M.; Yoon, J.; Kim, M.S.; Choi, B.; Kim, D.M.; Kim, D.H.; Park, I.; Choi, S.J. Transparent, Flexible Strain Sensor Based on a Solution-Processed Carbon Nanotube Network. ACS Appl. Mater. Interfaces 2017, 9, 26279–26285. [Google Scholar] [CrossRef]
- Amjadi, M.; Yoon, Y.J.; Park, I. Ultra-stretchable and skin-mountable strain sensors using carbon nanotubes-Ecoflex nanocomposites. Nanotechnology 2015, 26, 375501. [Google Scholar] [CrossRef]
- Chen, Y.J.; Li, Y.; Xu, D.H.; Zhai, W.T. Fabrication of stretchable, flexible conductive thermoplastic polyurethane/graphene composites via foaming. RSC Adv. 2015, 5, 82034–82041. [Google Scholar] [CrossRef]
- Gan, X.P.; Wang, J.Z.; Wang, Z.H.; Zheng, Z.; Lavorgna, M.; Ronca, A.; Fei, G.X.; Xia, H.S. Simultaneous realization of conductive segregation network microstructure and minimal surface porous macrostructure by SLS 3D printing. Mater. Des. 2019, 178, 107874. [Google Scholar] [CrossRef]
- Zhao, Y.; Song, J.-G.; Ryu, G.H.; Ko, K.Y.; Woo, W.J.; Kim, Y.; Kim, D.; Lim, J.H.; Lee, S.; Lee, Z. Low-temperature synthesis of 2D MoS2 on a plastic substrate for a flexible gas sensor. Nanoscale 2018, 10, 9338–9345. [Google Scholar] [CrossRef]
- Vuorinen, T.; Niittynen, J.; Kankkunen, T.; Kraft, T.M.; Mantysalo, M. Inkjet-Printed Graphene/PEDOT:PSS Temperature Sensors on a Skin-Conformable Polyurethane Substrate. Sci. Rep. 2016, 6, 35289. [Google Scholar] [CrossRef]
- Hassan, G.; Khan, M.U.; Bae, J.; Shuja, A. Inkjet printed self-healable strain sensor based on graphene and magnetic iron oxide nano-composite on engineered polyurethane substrate. Sci. Rep. 2020, 10, 18234. [Google Scholar] [CrossRef] [PubMed]
- Htwe, Y.Z.N.; Chow, W.S.; Suriati, G.; Thant, A.A.; Mariatti, M. Properties enhancement of graphene and chemical reduction silver nanoparticles conductive inks printed on polyvinyl alcohol (PVA) substrate. Synth. Met. 2019, 256, 116120. [Google Scholar] [CrossRef]
- Zheng, M.Y.; Li, W.Y.; Xu, M.J.; Xu, N.; Chen, P.; Han, M.; Xie, B. Strain sensors based on chromium nanoparticle arrays. Nanoscale 2014, 6, 3930–3933. [Google Scholar] [CrossRef] [PubMed]
- Liu, T.; Liu, M.M.; Dou, S.; Sun, J.M.; Cong, Z.F.; Jiang, C.Y.; Du, C.H.; Pu, X.; Hu, W.G.; Wang, Z.L. Triboelectric-Nanogenerator-Based Soft Energy-Harvesting Skin Enabled by Toughly Bonded Elastomer/Hydrogel Hybrids. ACS Nano 2018, 12, 2818–2826. [Google Scholar] [CrossRef]
- Wu, H.G.; Liu, Q.; Du, W.C.; Li, C.; Shi, G.Q. Transparent Polymeric Strain Sensors for Monitoring Vital Signs and Beyond. ACS Appl. Mater. Interfaces 2018, 10, 3895–3901. [Google Scholar] [CrossRef]
- Yeo, W.H.; Kim, Y.S.; Lee, J.; Ameen, A.; Shi, L.K.; Li, M.; Wang, S.D.; Ma, R.; Jin, S.H.; Kang, Z.; et al. Multifunctional Epidermal Electronics Printed Directly onto the Skin. Adv. Mater. 2013, 25, 2773–2778. [Google Scholar] [CrossRef]
- Liu, Z.Y.; Qi, D.P.; Guo, P.Z.; Liu, Y.; Zhu, B.W.; Yang, H.; Liu, Y.Q.; Li, B.; Zhang, C.G.; Yu, J.C.; et al. Thickness-Gradient Films for High Gauge Factor Stretchable Strain Sensors. Adv. Mater. 2015, 27, 6230–6237. [Google Scholar] [CrossRef]
- Choi, D.Y.; Kim, M.H.; Oh, Y.S.; Jung, S.H.; Jung, J.H.; Sung, H.J.; Lee, H.W.; Lee, H.M. Highly Stretchable, Hysteresis-Free Ionic Liquid-Based Strain Sensor for Precise Human Motion Monitoring. ACS Appl. Mater. Interfaces 2017, 9, 1770. [Google Scholar] [CrossRef] [PubMed]
- Yang, T.T.; Xie, D.; Li, Z.H.; Zhu, H.W. Recent advances in wearable tactile sensors: Materials, sensing mechanisms, and device performance. Mat. Sci. Eng. R Rep. 2017, 115, 1–37. [Google Scholar] [CrossRef]
- Li, S.; Park, J.G.; Wang, S.; Liang, R.; Zhang, C.; Wang, B. Working mechanisms of strain sensors utilizing aligned carbon nanotube network and aerosol jet printed electrodes. Carbon 2014, 73, 303–309. [Google Scholar] [CrossRef]
- Kang, D.; Shin, Y.E.; Jo, H.J.; Ko, H.; Shin, H.S. Mechanical Properties of Poly(dopamine)-Coated Graphene Oxide and Poly(vinyl alcohol) Composite Fibers Coated with Reduced Graphene Oxide and Their Use for Piezoresistive Sensing. Part. Part. Syst. Charact. 2017, 34, 1600382. [Google Scholar] [CrossRef]
- Park, J.; Lee, Y.; Hong, J.; Lee, Y.; Ha, M.; Jung, Y.; Lim, H.; Kim, S.Y.; Ko, H. Tactile-Direction-Sensitive and Stretchable Electronic Skins Based on Human-Skin-Inspired Interlocked Microstructures. ACS Nano 2014, 8, 12020–12029. [Google Scholar] [CrossRef] [PubMed]
- Pang, C.; Lee, G.Y.; Kim, T.I.; Kim, S.M.; Kim, H.N.; Ahn, S.H.; Suh, K.Y. A flexible and highly sensitive strain-gauge sensor using reversible interlocking of nanofibres. Nat. Mater. 2012, 11, 795–801. [Google Scholar] [CrossRef]
- Wang, C.F.; Zhao, J.; Ma, C.; Sun, J.L.; Tian, L.; Li, X.Y.; Li, F.T.; Han, X.; Liu, C.T.; Shen, C.Y.; et al. Detection of non-joint areas tiny strain and anti-interference voice recognition by micro-cracked metal thin film. Nano Energy 2017, 34, 578–585. [Google Scholar] [CrossRef]
- Wang, D.Y.; Tao, L.Q.; Liu, Y.; Zhang, T.Y.; Pang, Y.; Wang, Q.; Jiang, S.; Yang, Y.; Ren, T.L. High performance flexible strain sensor based on self-locked overlapping graphene sheets. Nanoscale 2016, 8, 20090–20095. [Google Scholar] [CrossRef]
- Li, J.H.; Zhao, S.F.; Zeng, X.L.; Huang, W.P.; Gong, Z.Y.; Zhang, G.P.; Sun, R.; Wong, C.P. Highly Stretchable and Sensitive Strain Sensor Based on Facilely Prepared Three-Dimensional Graphene Foam Composite. ACS Appl. Mater. Interfaces 2016, 8, 18954–18961. [Google Scholar] [CrossRef]
- Liu, X.; Tang, C.; Du, X.H.; Xiong, S.A.; Xi, S.Y.; Liu, Y.F.; Shen, X.; Zheng, Q.B.; Wang, Z.Y.; Wu, Y.; et al. A highly sensitive graphene woven fabric strain sensor for wearable wireless musical instruments. Mater. Horiz. 2017, 4, 477–486. [Google Scholar] [CrossRef]
- Jang, H.; Park, Y.J.; Chen, X.; Das, T.; Kim, M.S.; Ahn, J.H. Graphene-Based Flexible and Stretchable Electronics. Adv. Mater. 2016, 28, 4184–4202. [Google Scholar] [CrossRef] [PubMed]
- Zhao, S.F.; Li, J.H.; Cao, D.X.; Gao, Y.J.; Huang, W.P.; Zhang, G.P.; Sun, R.; Wong, C.P. Percolation threshold-inspired design of hierarchical multiscale hybrid architectures based on carbon nanotubes and silver nanoparticles for stretchable and printable electronics. J. Mater. Chem. C 2016, 4, 6666–6674. [Google Scholar] [CrossRef]
- Lin, Y.; Liu, S.Q.; Chen, S.; Wei, Y.; Dong, X.C.; Liu, L. A highly stretchable and sensitive strain sensor based on graphene-elastomer composites with a novel double-interconnected network. J. Mater. Chem. C 2016, 4, 6345–6352. [Google Scholar] [CrossRef]
- Suzuki, K.; Yataka, K.; Okumiya, Y.; Sakakibara, S.; Sako, K.; Mimura, H.; Inoue, Y. Rapid-Response, Widely Stretchable Sensor of Aligned MWCNT/Elastomer Composites for Human Motion Detection. ACS Sens. 2016, 1, 817–825. [Google Scholar] [CrossRef]
- Trung, T.Q.; Lee, N.E. Recent Progress on Stretchable Electronic Devices with Intrinsically Stretchable Components. Adv. Mater. 2017, 29, 1603167. [Google Scholar] [CrossRef]
- Xu, J.S.; Chen, J.; Zhang, M.; Hong, J.D.; Shi, G.Q. Highly Conductive Stretchable Electrodes Prepared by In Situ Reduction of Wavy Graphene Oxide Films Coated on Elastic Tapes. Adv. Electron. Mater. 2016, 2, 1600022. [Google Scholar] [CrossRef]
- Wei, Y.; Chen, S.; Yuan, X.; Wang, P.P.; Liu, L. Multiscale Wrinkled Microstructures for Piezoresistive Fibers. Adv. Funct. Mater. 2016, 26, 5078–5085. [Google Scholar] [CrossRef]
- Liu, Z.F.; Fang, S.; Moura, F.A.; Ding, J.N.; Jiang, N.; Di, J.; Zhang, M.; Lepro, X.; Galvao, D.S.; Haines, C.S.; et al. Hierarchically buckled sheath-core fibers for superelastic electronics, sensors, and muscles. Science 2015, 349, 400–404. [Google Scholar] [CrossRef]
- Guo, F.M.; Cui, X.; Wang, K.L.; Wei, J.Q. Stretchable and compressible strain sensors based on carbon nanotube meshes. Nanoscale 2016, 8, 19352–19358. [Google Scholar] [CrossRef]
- Zhao, Y.C.; Huang, X. Mechanisms and Materials of Flexible and Stretchable Skin Sensors. Micromachines 2017, 8, 69. [Google Scholar] [CrossRef] [Green Version]
- Kim, K.; Kim, J.; Hyun, B.G.; Ji, S.; Kim, S.Y.; Kim, S.; An, B.W.; Park, J.U. Stretchable and transparent electrodes based on in-plane structures. Nanoscale 2015, 7, 14577–14594. [Google Scholar] [CrossRef] [PubMed]
- Zhao, S.F.; Li, J.H.; Cao, D.X.; Zhang, G.P.; Li, J.; Li, K.; Yang, Y.; Wang, W.; Jin, Y.F.; Sun, R.; et al. Recent Advancements in Flexible and Stretchable Electrodes for Electromechanical Sensors: Strategies, Materials, and Features. ACS Appl. Mater. Interfaces 2017, 9, 12147–12164. [Google Scholar] [CrossRef] [PubMed]
- Tao, L.Q.; Wang, D.Y.; Tian, H.; Ju, Z.Y.; Liu, Y.; Pang, Y.; Chen, Y.Q.; Yang, Y.; Ren, T.L. Self-adapted and tunable graphene strain sensors for detecting both subtle and large human motions. Nanoscale 2017, 9, 8266–8273. [Google Scholar] [CrossRef] [PubMed]
- Li, X.T.; Hua, T.; Xu, B.G. Electromechanical properties of a yarn strain sensor with graphene-sheath/polyurethane-core. Carbon 2017, 118, 686–698. [Google Scholar] [CrossRef]
- Atalay, A.; Sanchez, V.; Atalay, O.; Vogt, D.M.; Haufe, F.; Wood, R.J.; Walsh, C.J. Batch Fabrication of Customizable Silicone-Textile Composite Capacitive Strain Sensors for Human Motion Tracking. Adv. Mater. Technol. 2017, 2, 1700136. [Google Scholar] [CrossRef]
- Tadakaluru, S.; Thongsuwan, W.; Singjai, P. Stretchable and Flexible High-Strain Sensors Made Using Carbon Nanotubes and Graphite Films on Natural Rubber. Sensors 2014, 14, 868–876. [Google Scholar] [CrossRef]
- Amjadi, M.; Pichitpajongkit, A.; Lee, S.; Ryu, S.; Park, I. Highly Stretchable and Sensitive Strain Sensor Based on Silver Nanowire-Elastomer Nanocomposite. ACS Nano 2014, 8, 5154–5163. [Google Scholar] [CrossRef]
- Kim, T.; Park, J.; Sohn, J.; Cho, D.; Jeon, S. Bioinspired, highly stretchable, and conductive dry adhesives based on 1D–2D hybrid carbon nanocomposites for all-in-one ECG electrodes. ACS Nano 2016, 10, 4770–4778. [Google Scholar] [CrossRef]
- Moriche, R.; Sanchez, M.; Jimenez-Suarez, A.; Prolongo, S.G.; Urena, A. Strain monitoring mechanisms of sensors based on the addition of graphene nanoplatelets into an epoxy matrix. Compos. Sci. Technol. 2016, 123, 65–70. [Google Scholar] [CrossRef]
- Selvan, N.T.; Eshwaran, S.B.; Das, A.; Stockelhuber, K.W.; Wiessner, S.; Potschke, P.; Nando, G.B.; Chervanyov, A.I.; Heinrich, G. Piezoresistive natural rubber-multiwall carbon nanotube nanocomposite for sensor applications. Sens. Actuators A Phys. 2016, 239, 102–113. [Google Scholar] [CrossRef]
- Yang, T.T.; Jiang, X.; Zhong, Y.J.; Zhao, X.L.; Lin, S.Y.; Li, J.; Li, X.M.; Xu, J.L.; Li, Z.H.; Zhu, H.W. A Wearable and Highly Sensitive Graphene Strain Sensor for Precise Home-Based Pulse Wave Monitoring. ACS Sens. 2017, 2, 967–974. [Google Scholar] [CrossRef] [PubMed]
- Benchirouf, A.; Muller, C.; Kanoun, O. Electromechanical Behavior of Chemically Reduced Graphene Oxide and Multi-walled Carbon Nanotube Hybrid Material. Nanoscale Res. Lett. 2016, 11, 4. [Google Scholar] [CrossRef] [PubMed]
- Xin, Y.Y.; Zhou, J.; Xu, X.Z.; Lubineau, G. Laser-engraved carbon nanotube paper for instilling high sensitivity, high stretchability, and high linearity in strain sensors. Nanoscale 2017, 9, 10897–10905. [Google Scholar] [CrossRef] [PubMed]
- Giffney, T.; Bejanin, E.; Kurian, A.S.; Travas-Sejdic, J.; Aw, K. Highly stretchable printed strain sensors using multi-walled carbon nanotube/silicone rubber composites. Sens. Actuators A Phys. 2017, 259, 44–49. [Google Scholar] [CrossRef]
- Kim, J.Y.; Ji, S.; Jung, S.; Ryu, B.H.; Kim, H.S.; Lee, S.S.; Choi, Y.; Jeong, S. 3D printable composite dough for stretchable, ultrasensitive and body-patchable strain sensors. Nanoscale 2017, 9, 11035–11046. [Google Scholar] [CrossRef]
- Wang, R.; Jiang, N.; Su, J.; Yin, Q.; Zhang, Y.; Liu, Z.S.; Lin, H.B.; Moura, F.A.; Yuan, N.Y.; Roth, S.; et al. A Bi-Sheath Fiber Sensor for Giant Tensile and Torsional Displacements. Adv. Funct. Mater. 2017, 27, 1702134. [Google Scholar] [CrossRef]
- Lozano-Perez, C.; Cauich-Rodriguez, J.V.; Aviles, F. Influence of rigid segment and carbon nanotube concentration on the cyclic piezoresistive and hysteretic behavior of multiwall carbon nanotube/segmented polyurethane composites. Compos. Sci. Technol. 2016, 128, 25–32. [Google Scholar] [CrossRef]
- Yamada, T.; Hayamizu, Y.; Yamamoto, Y.; Yomogida, Y.; Izadi-Najafabadi, A.; Futaba, D.N.; Hata, K. A stretchable carbon nanotube strain sensor for human-motion detection. Nat. Nanotechnol. 2011, 6, 296–301. [Google Scholar] [CrossRef]
- Foroughi, J.; Spinks, G.M.; Aziz, S.; Mirabedini, A.; Jeiranikhameneh, A.; Wallace, G.G.; Kozlov, M.E.; Baughman, R.H. Knitted Carbon-Nanotube-Sheath/Spandex-Core Elastomeric Yarns for Artificial Muscles and Strain Sensing. ACS Nano 2016, 10, 9129–9135. [Google Scholar] [CrossRef]
- Wang, Z.; Huang, Y.; Sun, J.; Huang, Y.; Hu, H.; Jiang, R.; Gai, W.; Li, G.; Zhi, C. Polyurethane/Cotton/Carbon Nanotubes Core-Spun Yarn as High Reliability Stretchable Strain Sensor for Human Motion Detection. ACS Appl. Mater. Interfaces 2016, 8, 24837–24843. [Google Scholar] [CrossRef]
- Song, H.L.; Zhang, J.Q.; Chen, D.B.; Wang, K.J.; Niu, S.C.; Han, Z.W.; Ren, L.Q. Superfast and high-sensitivity printable strain sensors with bioinspired micron-scale cracks. Nanoscale 2017, 9, 1166–1173. [Google Scholar] [CrossRef] [PubMed]
- Flandin, L.; Chang, A.; Nazarenko, S.; Hiltner, A.; Baer, E. Effect of strain on the properties of an ethylene-octene elastomer with conductive carbon fillers. J. Appl. Polym. Sci. 2000, 76, 894–905. [Google Scholar] [CrossRef]
- Zhao, J.H.; Dai, K.; Liu, C.G.; Zheng, G.Q.; Wang, B.; Liu, C.T.; Chen, J.B.; Shen, C.Y. A comparison between strain sensing behaviors of carbon black/polypropylene and carbon nanotubes/polypropylene electrically conductive composites. Compos. Part A Appl. Sci. Manuf. 2013, 48, 129–136. [Google Scholar] [CrossRef]
- Sreenatha Reddy, S.; Dhanasekaran, R.; Kumar, S.; Kanwar, S.S.; Shruthi, R.; Navaneetha, T. Studies on Application and Mechanism of Self-Healing Polymer and Nanocomposite Materials. In Recent Trends in Mechanical Engineering; Springer: Singapore, 2020; pp. 487–497. [Google Scholar]
- Banshiwal, J.K.; Tripathi, D.N. Self-Healing Polymer Composites for Structural Application. In Functional Materials; IntechOpen: London, UK, 2019. [Google Scholar]
- Terada, T.; Shiba, K.; Suzuki, M.; Sugita, M.; Matsubara, H. Film Sensor Using Carbon Particles for Monitoring Integrity of Steel Structures. In Proceedings of the Smart Structures and Materials 2004: Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems, San Diego, CA, USA, 14–18 March 2004; Volume 5391, pp. 202–210. [Google Scholar] [CrossRef]
- Ku-Herrera, J.J.; Aviles, F. Cyclic tension and compression piezoresistivity of carbon nanotube/vinyl ester composites in the elastic and plastic regimes. Carbon 2012, 50, 2592–2598. [Google Scholar] [CrossRef]
- Lundberg, A.; Zhao, X.; Kanoun, O. Investigation of Stability and Dynamic Behavior of a Carbon Nanotube/Epoxy Composite Strain Sensor. In Proceedings of the 2019 16th International Multi-Conference on Systems, Signals & Devices, Istanbul, Turkey, 21–24 March 2019; pp. 149–153. [Google Scholar]
- Ji, X. Epoxy Matrix Composites Filled with Nano-Carbon Black and Their Strain and Crack Monitoring. Ph.D. Thesis, Harbin Institute of Technology, Harbin, China, 2009. [Google Scholar]
- Zhang, Y. Research on Properties of CNT/PDMS Flexible Sensing Material and Its Monitoring of Structural Crack. Ph.D. Thesis, Harbin Institute of Technology, Harbin, China, 2017. [Google Scholar]
- Zhang, Y.Q.; Ge, Y.; Du, Y.B.; Yang, L.L. Monitoring of Compression and Bending Process of Reactive Powder Concrete Using MWCNTs/PDMS Composite Sensors. IEEE Sens. J. 2017, 17, 6153–6159. [Google Scholar] [CrossRef]
- Wu, Z.Q.; Wei, J.; Dong, R.Z.; Chen, H. Epoxy Composites with Reduced Graphene Oxide-Cellulose Nanofiber Hybrid Filler and Their Application in Concrete Strain and Crack Monitoring. Sensors 2019, 19, 3963. [Google Scholar] [CrossRef]
- Wu, Z.Q.; Wei, J.; Dong, R.Z.; Chen, H. A Three-Dimensional Strain Rosette Sensor Based on Graphene Composite with Piezoresistive Effect. J. Sens. 2019, 2019, 2607893. [Google Scholar] [CrossRef]
- Zhang, B.N.; Wang, S.L.; Li, X.X.; Zhang, X.; Yang, G.; Qiu, M.F. Crack width monitoring of concrete structures based on smart film. Smart Mater. Struct. 2014, 23, 45031. [Google Scholar] [CrossRef]
- Ryu, D.; Loh, K.J.; Ireland, R.; Karimzada, M.; Yaghmaie, F.; Gusman, A.M. In Situ reduction of gold nanoparticles in PDMS matrices and applications for large strain sensing. Smart Struct. Syst. 2011, 8, 471–486. [Google Scholar] [CrossRef]
- Hallaji, M.; Pour-Ghaz, M. A new sensing skin for qualitative damage detection in concrete elements: Rapid difference imaging with electrical resistance tomography. NDT E Int. 2014, 68, 13–21. [Google Scholar] [CrossRef]
- Nie, X.F.; Zhang, S.S.; Teng, J.G. Strengths of RC beams with a fibre-reinforced polymer (FRP)-strengthened web opening. Compos. Struct. 2021, 258, 113380. [Google Scholar] [CrossRef]
- Zhang, S.S.; Yu, T. Fibre-reinforced polymer strengthening and fibre Bragg grating-based monitoring of reinforced concrete cantilever slabs with insufficient anchorage length of steel bars. Adv. Struct. Eng. 2017, 20, 1684–1698. [Google Scholar] [CrossRef]
- Nag-Chowdhury, S.; Bellegou, H.; Pillin, I.; Castro, M.; Longrais, P.; Feller, J.F. Non-intrusive health monitoring of infused composites with embedded carbon quantum piezo-resistive sensors. Compos. Sci. Technol. 2016, 123, 286–294. [Google Scholar] [CrossRef]
- Park, J.M.; Kwon, D.J.; Wang, Z.J.; DeVries, K.L. Review of self-sensing of damage and interfacial evaluation using electrical resistance measurements in nano/micro carbon materials-reinforced composites. Adv. Compos. Mater. 2015, 24, 197–219. [Google Scholar] [CrossRef]
- Zhang, H.; Liu, Y.; Huang, M.L.; Bilotti, E.; Peijs, T. Dissolvable thermoplastic interleaves for carbon nanotube localization in carbon/epoxy laminates with integrated damage sensing capabilities. Struct. Health Monit. 2018, 17, 59–66. [Google Scholar] [CrossRef]
- Gallo, G.J.; Thostenson, E.T. Electrical characterization and modeling of carbon nanotube and carbon fiber self-sensing composites for enhanced sensing of microcracks. Mater. Today Commun. 2015, 3, 17–26. [Google Scholar] [CrossRef]
- Ku-Herrera, J.D.; La Saponara, V.; Aviles, F. Selective damage sensing in multiscale hierarchical composites by tailoring the location of carbon nanotubes. J. Intel. Mat. Syst. Str. 2018, 29, 553–562. [Google Scholar] [CrossRef]
- He, D.L.; Fan, B.H.; Zhao, H.; Lu, X.X.; Yang, M.H.; Liu, Y.; Bai, J.B. Design of Electrically Conductive Structural Composites by Modulating Aligned CVD-Grown Carbon Nanotube Length on Glass Fibers. ACS Appl. Mater. Interfaces 2017, 9, 2948–2958. [Google Scholar] [CrossRef]
- Moriche, R.; Jiménez-Suárez, A.; Sánchez, M.; Prolongo, S.G.; Ureña, A. Graphene nanoplatelets coated glass fibre fabrics as strain sensors. Compos. Sci. Technol. 2017, 146, 59–64. [Google Scholar] [CrossRef]
- Salvado, R.; Lopes, C.; Szojda, L.; Araujo, P.; Gorski, M.; Velez, F.J.; Castro-Gomes, J.; Krzywon, R. Carbon Fiber Epoxy Composites for Both Strengthening and Health Monitoring of Structures. Sensors 2015, 15, 10753–10770. [Google Scholar] [CrossRef]
- Park, J.M.; Kwon, D.J.; Shin, P.S.; Kim, J.H.; DeVries, K.L. New Sensing Method of Dispersion and Damage Detection of Carbon Fiber/Polypropylene-Polyamide Composites via Two-Dimensional Electrical Resistance Mapping. In Proceedings of the Behavior and Mechanics of Multifunctional Materials and Composites, Portland, OR, USA, 26–28 March 2017; Volume 10165. [Google Scholar] [CrossRef]
- Kwon, D.J.; Shin, P.S.; Kim, J.H.; Wang, Z.J.; DeVries, K.L.; Park, J.M. Detection of damage in cylindrical parts of carbon fiber/epoxy composites using electrical resistance (ER) measurements. Compos. Part B Eng. 2016, 99, 528–532. [Google Scholar] [CrossRef]
- Wang, Z.; Li, P.; Song, R.G.; Qian, W.; Zhou, H.; Wang, Q.L.; Wang, Y.; Zeng, X.C.; Ren, L.; Yan, S.L.; et al. High conductive graphene assembled films with porous micro-structure for freestanding and ultra-low power strain sensors. Sci. Bull. 2020, 65, 1363–1370. [Google Scholar] [CrossRef]
- Zhang, J.B.; Song, R.G.; Zhao, X.; Fang, R.; Zhang, B.; Qian, W.; Zhang, J.W.; Liu, C.G.; He, D.P. Flexible Graphene-Assembled Film-Based Antenna for Wireless Wearable Sensor with Miniaturized Size and High Sensitivity. ACS Omega 2020, 5, 12937–12943. [Google Scholar] [CrossRef] [PubMed]
- Li, P.; Wang, Z.; Song, R.G.; Qian, W.; Wen, P.; Yang, Z.G.; He, D.P. Customizable fabrication for auxetic graphene assembled macrofilms with high conductivity and flexibility. Carbon 2020, 162, 545–551. [Google Scholar] [CrossRef]
- Zhang, J.J.; Wu, B.; Zhao, Y.T.; Song, L.; Zu, H.R.; Song, R.G.; He, D.P. Two-Dimensional Highly Sensitive Wireless Displacement Sensor with Bilayer Graphene-Based Frequency Selective Surface. IEEE Sens. J. 2021, 21, 23889–23897. [Google Scholar] [CrossRef]
Figure 1.
(a) conductive paths via the contact points [31] (Copyright 2017, Elsevier Ltd.); (b) variation of the contact resistance under pressure [33] (Copyright 2019, American Chemical Society); (c) interface effect of CN-coated fibers under external pressure [34] (Copyright 2018, American Chemical Society).
Figure 1.
(a) conductive paths via the contact points [31] (Copyright 2017, Elsevier Ltd.); (b) variation of the contact resistance under pressure [33] (Copyright 2019, American Chemical Society); (c) interface effect of CN-coated fibers under external pressure [34] (Copyright 2018, American Chemical Society).

Figure 2.
(a) SEM image of possible tunneling effect between CNTs in nanocomposites; (b) tunnel resistance modeling of resistance network [35] (Copyright 2008, Elsevier Ltd.).
Figure 2.
(a) SEM image of possible tunneling effect between CNTs in nanocomposites; (b) tunnel resistance modeling of resistance network [35] (Copyright 2008, Elsevier Ltd.).

Figure 3.
Current density distribution of graphene rubber composite: (a) ignoring tunnel effect; (b) considering tunnel effect; (c) conductive paths formed in graphene rubber composites [37] (Copyright 2020, Elsevier Ltd.).
Figure 3.
Current density distribution of graphene rubber composite: (a) ignoring tunnel effect; (b) considering tunnel effect; (c) conductive paths formed in graphene rubber composites [37] (Copyright 2020, Elsevier Ltd.).

Figure 4.
(a) percolation network of the randomly assigned graphene flakes [23] (Copyright 2019, Elsevier Ltd.); (b) percolation network of silver nanowires with low filler density [42] (Copyright 2016, WILEY-VCH).

Figure 5.
Crack propagation under SEM view: microcrack propagation on the graphene–PDMS composite film under stretching [54] (Copyright 2012, the authors).
Figure 5.
Crack propagation under SEM view: microcrack propagation on the graphene–PDMS composite film under stretching [54] (Copyright 2012, the authors).

Figure 6.
Carbon-type conductive materials.

Figure 7.
Hybrid conductive materials.

Figure 8.
Deformation and crack monitoring [143] (a) the positions of the film sensor and resistance strain gauge; (b) four-point loading chart; (c) strains of composite film sensors (SA, SB, and SC) and traditional resistance strain gauge (TA) during loading. (open access, MDPI).
Figure 8.
Deformation and crack monitoring [143] (a) the positions of the film sensor and resistance strain gauge; (b) four-point loading chart; (c) strains of composite film sensors (SA, SB, and SC) and traditional resistance strain gauge (TA) during loading. (open access, MDPI).

Figure 9.
(a) crack expansion process of concrete square slab, (b) corresponding electrical resistance tomography of sensing skin under for crack detection [147] (Copyright 2014, Elsevier Ltd.).
Figure 9.
(a) crack expansion process of concrete square slab, (b) corresponding electrical resistance tomography of sensing skin under for crack detection [147] (Copyright 2014, Elsevier Ltd.).

Figure 10.
(a) textile-pattern strain sensor; (b) concrete specimens reinforced with carbon fiber epoxy resin composites [158] (open access, MDPI).
Figure 10.
(a) textile-pattern strain sensor; (b) concrete specimens reinforced with carbon fiber epoxy resin composites [158] (open access, MDPI).

Figure 11.
(a) Long CFRP cylinder specimen during flexural test; (b) resistance variation graph under different fracture mode of CFRP cylinders [159] (Copyright 2016, Elsevier Ltd.).
Figure 11.
(a) Long CFRP cylinder specimen during flexural test; (b) resistance variation graph under different fracture mode of CFRP cylinders [159] (Copyright 2016, Elsevier Ltd.).

Figure 12.
(a) Electrode disposition on the CNT/epoxy coating; (b) damages on the slab; (c) two-dimensional electrical resistance mapping of crack detection; (d) normalized resistance variation under tensile strain; (e) gauge factor variation under tensile strain; (f) normalized resistance variation with damage length [53] (Copyright 2017, Elsevier B.V.).
Figure 12.
(a) Electrode disposition on the CNT/epoxy coating; (b) damages on the slab; (c) two-dimensional electrical resistance mapping of crack detection; (d) normalized resistance variation under tensile strain; (e) gauge factor variation under tensile strain; (f) normalized resistance variation with damage length [53] (Copyright 2017, Elsevier B.V.).

Figure 13.
Flexible strain sensor based on pure macro-graphene: (a) fabrication of the GAF [160] (Copyright 2016, Elsevier Ltd.); (b) GAF antenna-based wireless strain sensor for measuring compression and tension [162] (Copyright 2020, American Chemical Society).

Table 1.
Symbols and abbreviations of the materials.
| Abbreviations | Material | Abbreviations | Material |
|---|---|---|---|
| AFM | Atomic Force Microscope | PDMS | Polydimethylsiloxane |
| AgNPs | Silver Nanoparticles | PEDOT: PSS | Polyethylenedioxythiophene: Polystyrene Sulfonate |
| AgNWs | Silver Nanowires | PET | Polyethylene terephthalate |
| AuNWs | Gold Nanowires | PI | Polyimide |
| CB | Carbon Black | PMVS | Polymethylvinylsiloxane |
| CNTs | Carbon Nanotubes | POE | Polyolefin Elastomer |
| CPCs | Conductive Polymer Composites | PP | Polypropylene |
| CSF | Carbonized Silk Fabric | PPy | Polypyrrole |
| CuNWs | Copper Nanowires | PU | Polyurethane |
| DI | Deionized Water | PVA | Polyvinyl Alcohol |
| EG | Ethylene Glycol | PVC | Polyvinyl Chloride |
| FBGs | Fiber Bragg Gratings | PVDF | Polyvinylidene Fluoride |
| FDM | Fused Deposition Modelling | rGO | Reduced Graphene Oxide |
| FGS | Fragmentized Graphene Sponges | SBCs | Styrenic Block Copolymers |
| FSG | Fish-Scale-Like Graphene | SBR | Styrene-Butadiene Rubber |
| GWF | Graphene Woven Fabric | SBS | Polystyrene-Block-Butadiene-Block-Styrene |
| IL | Ionic Liquid | SEBS | Styrene-Ethylene/Butylene-Styrene Triblock Copolymer |
| ILBW | Ionic-Liquid-Based Wavy | SEM | Scanning Electron Microscopy |
| MWCNTs | Multi-Walled Carbon Nanotubes | SPX | Spandex |
| LPG | Laser Patterned Graphene | SWCNTs | Single-Walled Carbon Nanotubes |
| NaCl | Sodium Chloride | TPU | Thermoplastic Polyurethane |
| NR | Natural Rubber | TPV | Thermoplastic Vulcanizate |
| OBC | Olefin Block Copolymer | WEP | Waterborne Epoxy |
| PANI | Polyaniline |
Table 2.
Conductive materials and flexible substrates (‘ε’ is strain).
| No. | Materials Filler + Substrate | Maximum Detectable Range | Gauge Factor/GF (Strain Range) | Linearity (Strain Range) | Cyclic Times for Durability |
|---|---|---|---|---|---|
| [58] | CuNWs + PDMS | 7.5% | Nonlinear | ||
| [65] | CB + Knitted Fabric | 60% | 1~100 | Nonlinear | 100,000 (ε < 60%) |
| [67] | CNT + TPU | 400% | 4~69 | Nonlinear | 1000 |
| [68] | MWCNT + SBC | 45% | 5.39~8.58 × 107 | Nonlinear | 600 |
| [69] | CNT/Graphene + PDMS | 10% | 0.4 | Linear (ε < 10%) | 3000 (ε < 10%) |
| [73] | AuNWs/AgNWs + PDMS | 70% | 236 (ε < 5%) | Nonlinear | 1000 (ε < 10%) |
| [74] | MWCNT + PU | 200% | 5~1.4 × 105 | Nonlinear | |
| [75] | CNT/CB + PMVS | 60% | 1~192 | Nonlinear | 10,000 (ε < 30%) |
| [76] | CNT/CB + PVDF | 10% | 0.6 | Nonlinear | |
| [77] | CNT/Graphene + TPU | 30% | 152 | Nonlinear | |
| [79] | CNT + PDMS | 30% | 3 | Linear (ε < 30%) | 600 |
| [80] | CNT + Ecoflex | 500% | 2.4 | Linear (ε < 100%) | 2000 (ε < 300%) |
| [82] | SWCNT + TPU | 25% | 0.2 | Linear (ε < 25%) | 1000 (ε < 20%) |
| [85] | Graphene + PVA | 55% | 271 (ε < 35%) | Nonlinear | 10,000 (ε < 55%) |
| [87] | CrNP + PET | 3% | 20 (ε < 0.36%) | Nonlinear |
Table 3.
Flexible strain sensor with improved sensing performance (‘ε’ is strain).
| Ref. | Materials Filler + Substrate | Maximum Detectable Range | Gauge Factor (Sensing Range) | Linearity (Strain Range) | Cyclic Times for Durability |
|---|---|---|---|---|---|
| [91] | SWCNT+ PDMS | 150% | 161 (ε < 2%), 9.8 (2% < ε < 15%), 0.58 (ε > 15%) | Multi-stage linear | 100,000 (ε < 60%) |
| [94] | CNT + PI | 1% | 40 | Near linear (ε < 0.8%) | 500 (ε < 0.8%) |
| [95] | Graphene + PVA | 1% | 2.3 (ε < 1%) | Linear | 1800 |
| [96] | CNT + PDMS | 120% | 27.8 (ε < 40%), 1084 (40% < ε < 90%) | Multi-stage linear | |
| [97] | Pt + PDMS | 4% | 0.75 (ε < 4%) | Linear | |
| [99] | Graphene + PDMS | 7.5% | 3.4 (ε < 2.5%), 100 (2.5% < ε < 5%), 400 (5% < ε < 7.5%) | Multi-stage linear | |
| [101] | Graphene + PDMS | 3% | 223 (ε < 3%) | Linear | 1000 |
| [105] | MWCNTs + PDMS | 200% | 10.5 | Linear (ε < 100%) | 180,000 (ε < 30%) |
| [110] | CNTs + PDMS | 11% | 1 (ε < 30%), 2 (30% < ε < 50%) | Multi-stage linear | 1000 (ε < 20%) |
| [114] | Graphene + Ecoflex | 100% | 457 (ε < 35%), 268 (35% < ε < 100%) | Multi-stage linear | 180 |
| [123] | GO/MWCNTs + Kapton HN | 0.6% | 8.5 | Near linear (ε < 0.5%) | |
| [124] | CNT +PDMS | 150% | 2.2 × 103 (ε < 15%), 4.2 × 104 (22% < ε < 150%) | Multi-stage linear | 5000 |
| [125] | MWCNTs + Ecoflex | 300% | 1.5 | Near linear (ε < 300%) | |
| [127] | CNT sheets + Rubber | 600% | 0.5 (ε < 200%), 0.14 (200% < ε < 600%) | Near linear (ε < 1%) | 5000 (ε < 100%) |
| [130] | CNT + SPX | 80% | 0.2~0.3 | Nonlinear | 270,000 (ε < 40%) |
| [132] | CB + paper | 0.22% | 647 (ε < 0.14%), 33 (ε < 0.22%) | Multi-stage linear | 70,000 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Gao, K.; Zhang, Z.; Weng, S.; Zhu, H.; Yu, H.; Peng, T. Review of Flexible Piezoresistive Strain Sensors in Civil Structural Health Monitoring. Appl. Sci. 2022, 12, 9750. https://doi.org/10.3390/app12199750
AMA Style
Gao K, Zhang Z, Weng S, Zhu H, Yu H, Peng T. Review of Flexible Piezoresistive Strain Sensors in Civil Structural Health Monitoring. Applied Sciences. 2022; 12(19):9750. https://doi.org/10.3390/app12199750
Chicago/Turabian StyleGao, Ke, Zhiyue Zhang, Shun Weng, Hongping Zhu, Hong Yu, and Tingjun Peng. 2022. "Review of Flexible Piezoresistive Strain Sensors in Civil Structural Health Monitoring" Applied Sciences 12, no. 19: 9750. https://doi.org/10.3390/app12199750
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.