

A Comparative Study of Control Methods for X3D Quadrotor Feedback Trajectory Control

 , , , ,
, , , ,
Abstract
:1. Introduction
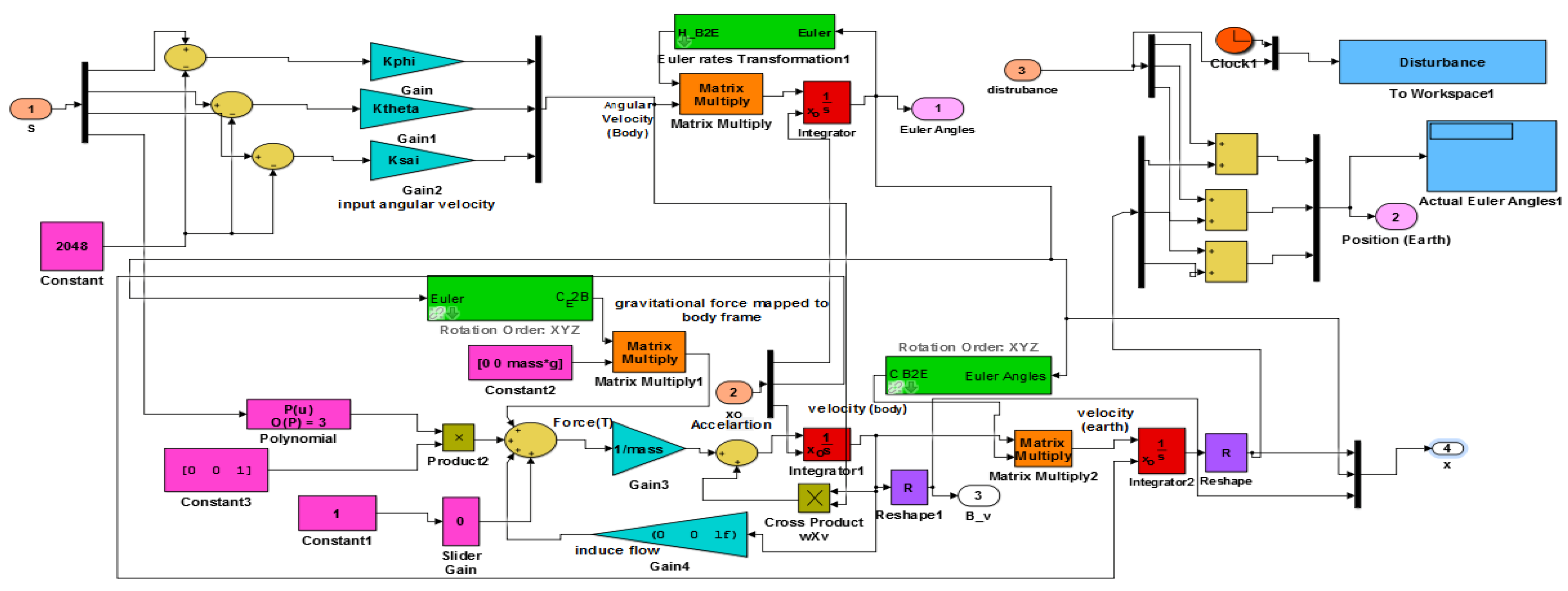
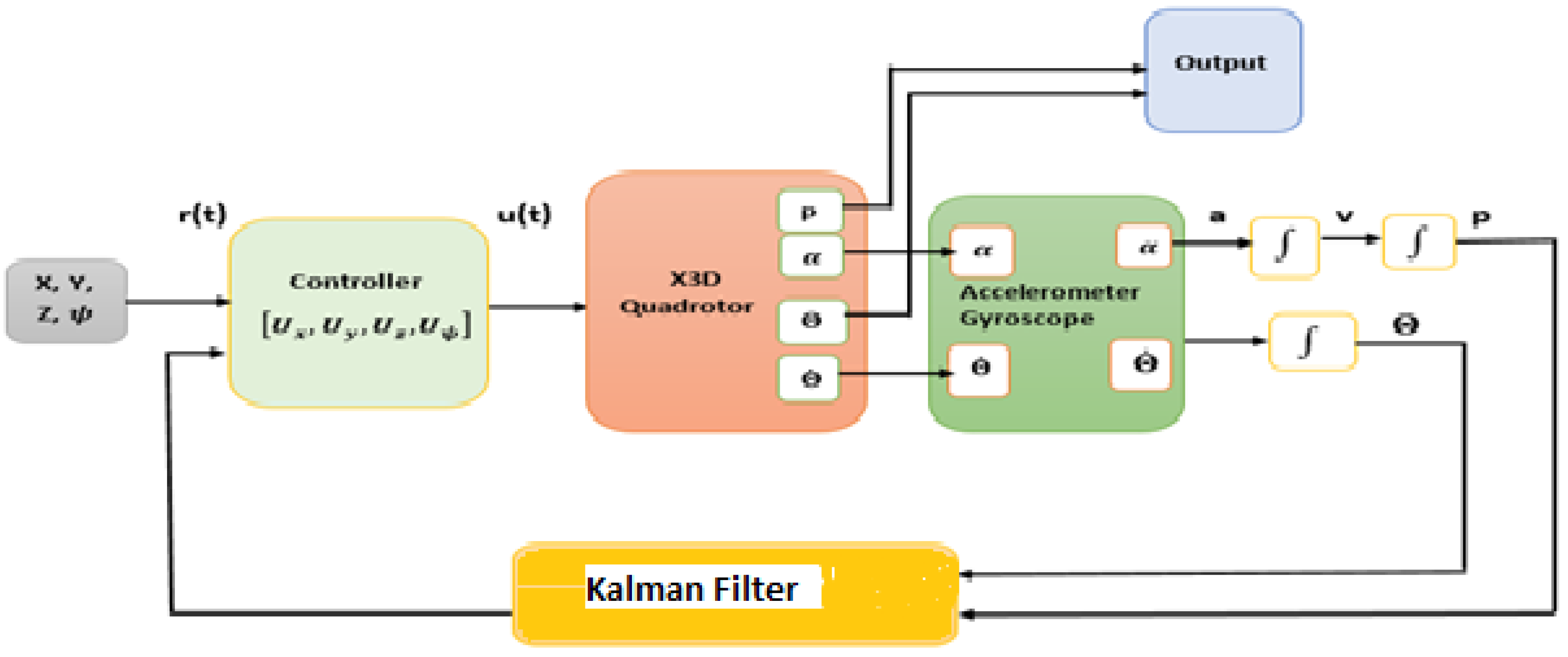
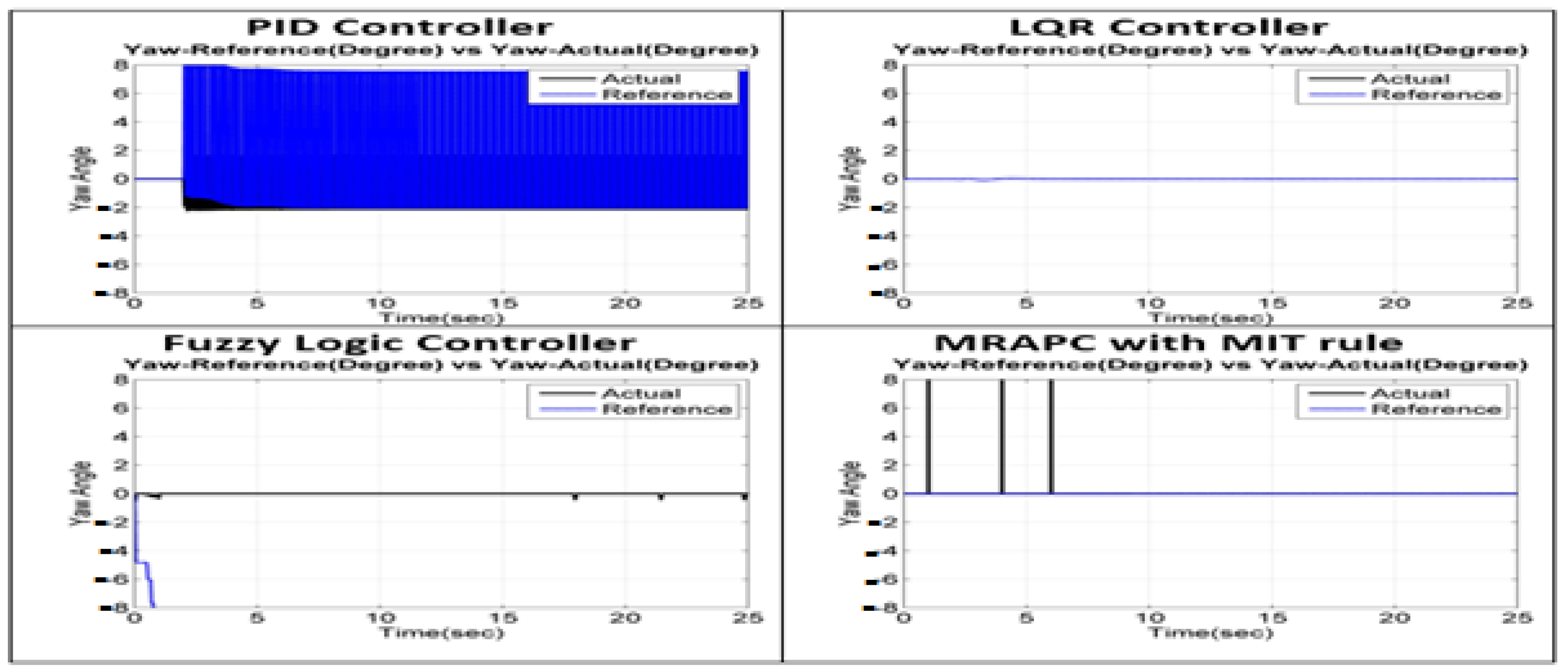
- SIMULINK simulation of nonlinear X3D quadrotor model to validate control approaches.
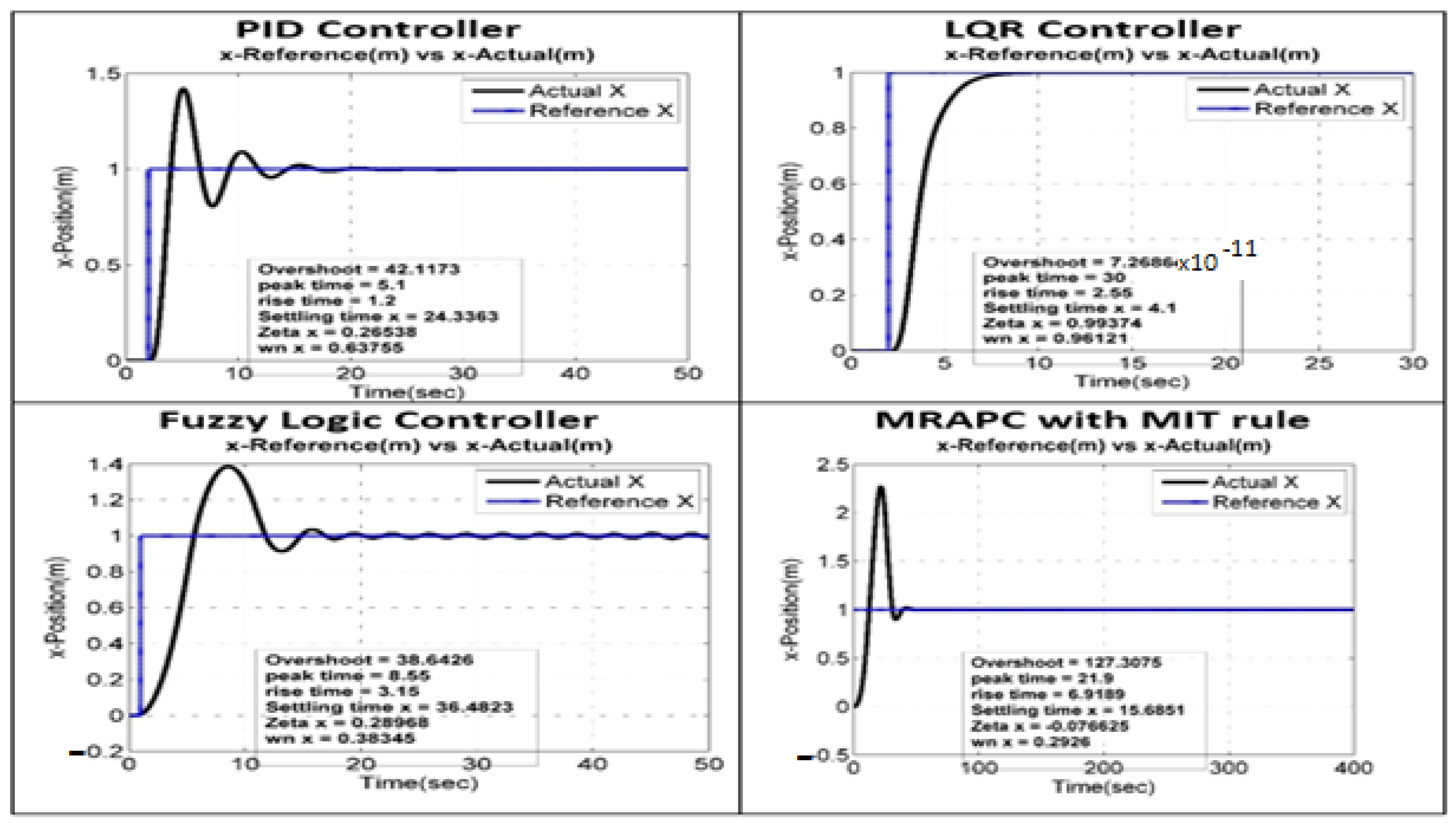
- Two linear control systems are implemented: the conventional PID and the LQR control system.
- Two nonlinear control systems are implemented: fuzzy control and model reference adaptive PID controller (MRAPC) using MIT rules.
- Performance comparison of all controllers for quadrotor trajectory tracking based on transient response. The proposed controllers’ performance is anticipated to be better in the presence of parameter uncertainty and external disturbances.
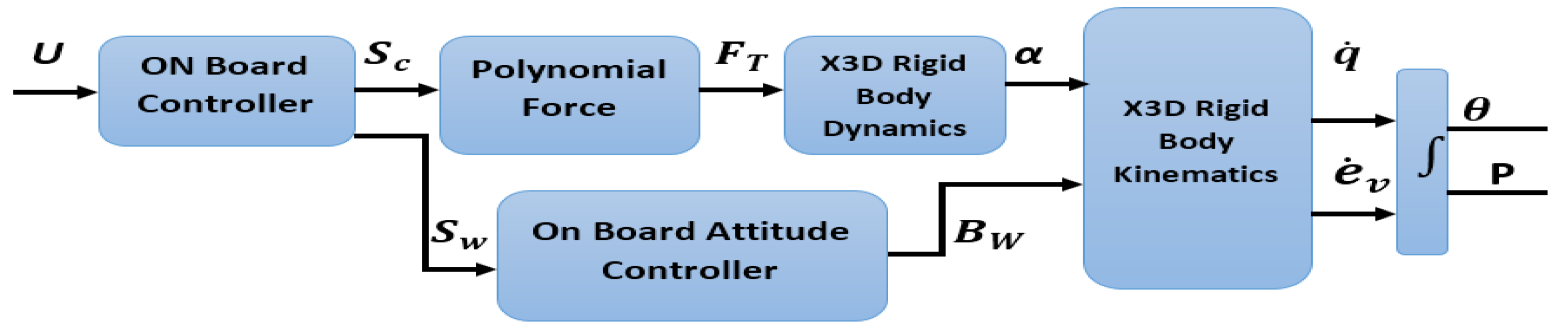
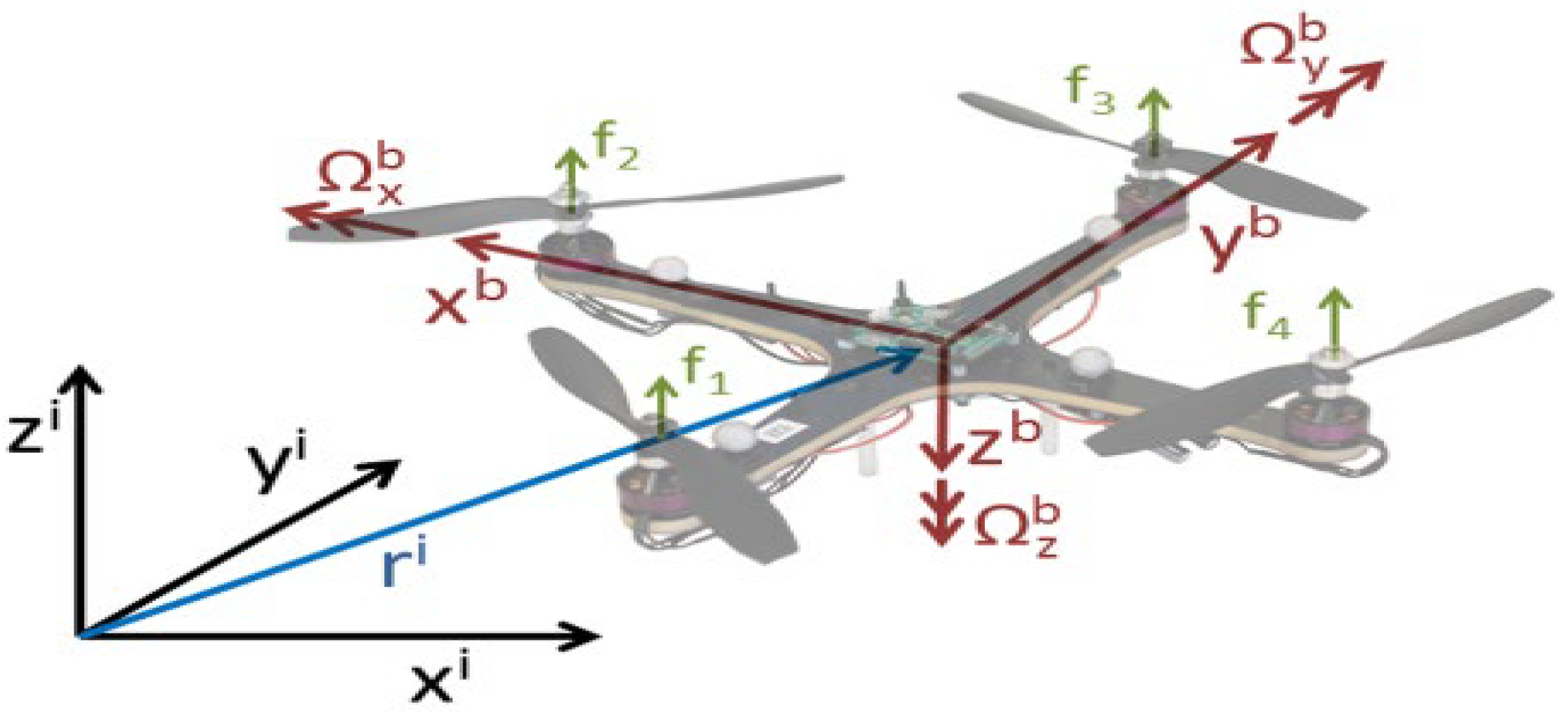
2. Mathematical Modeling of X3d Quadrotor
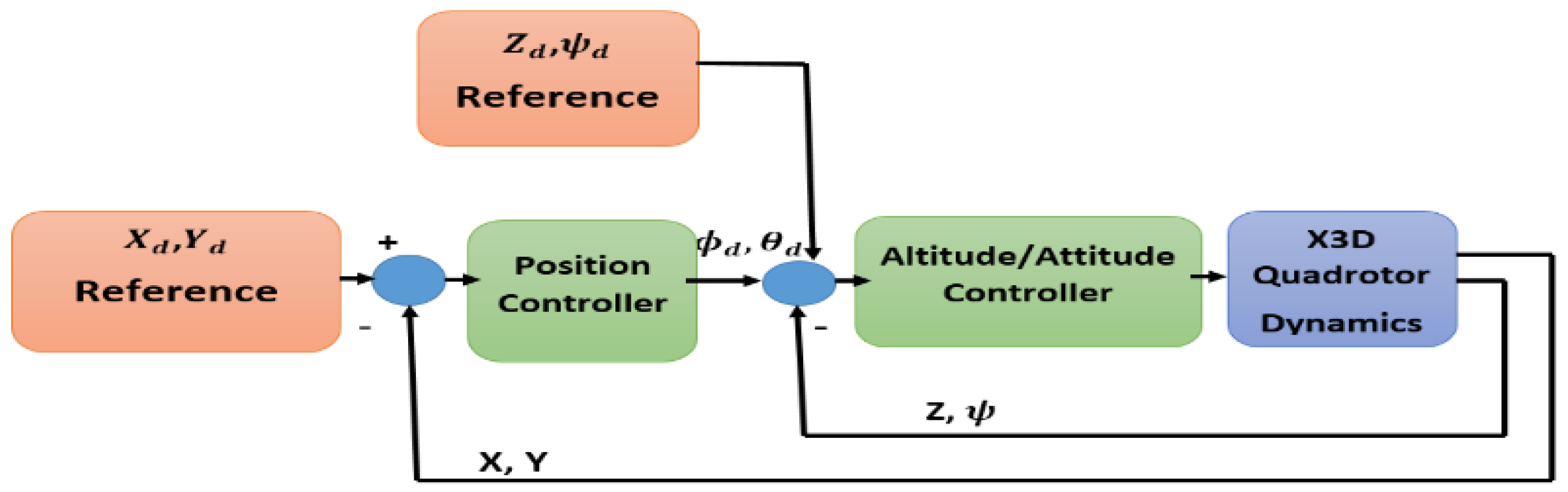
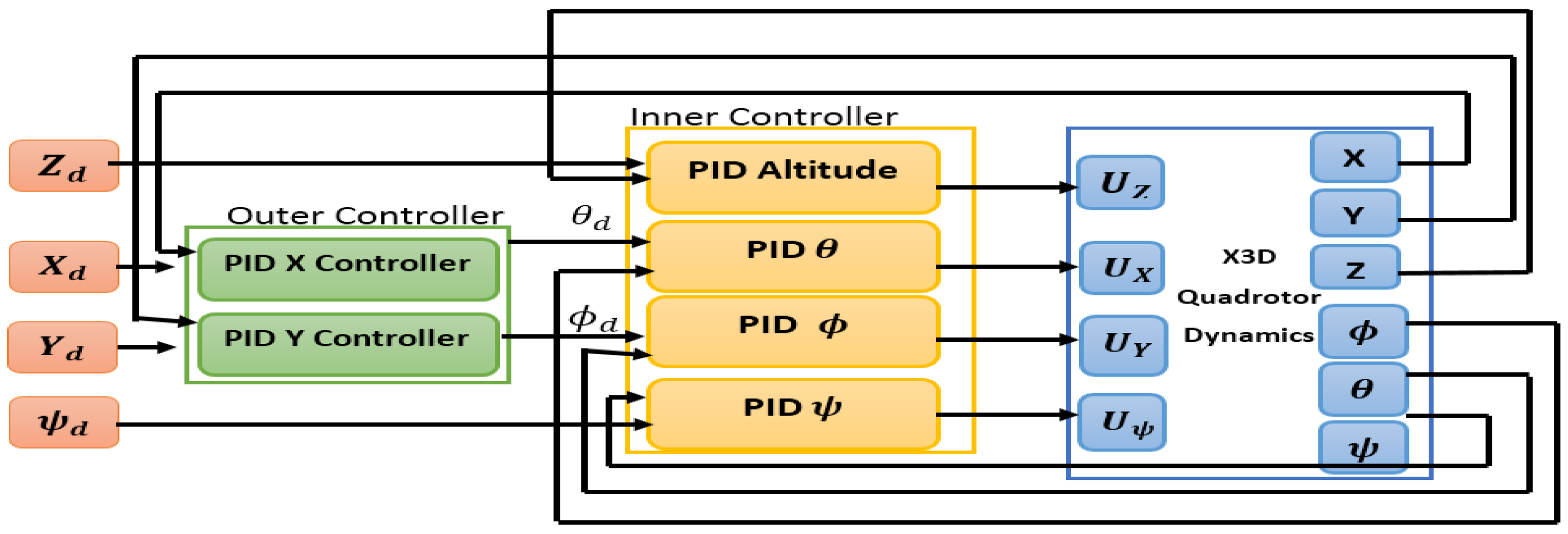
3. X3D Quadrotor Controller Design
3.1. PID Control System
3.2. LQR Control System
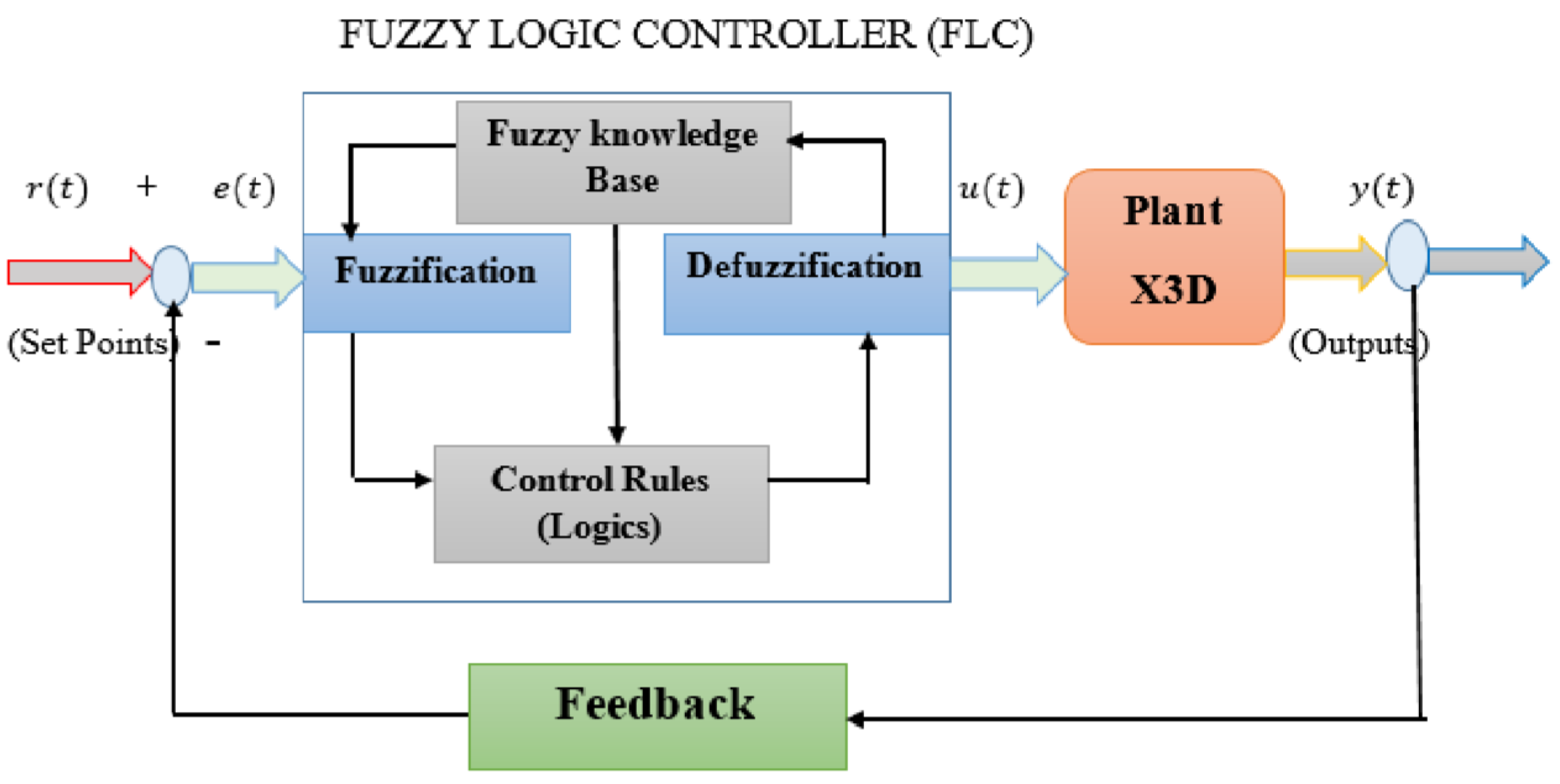
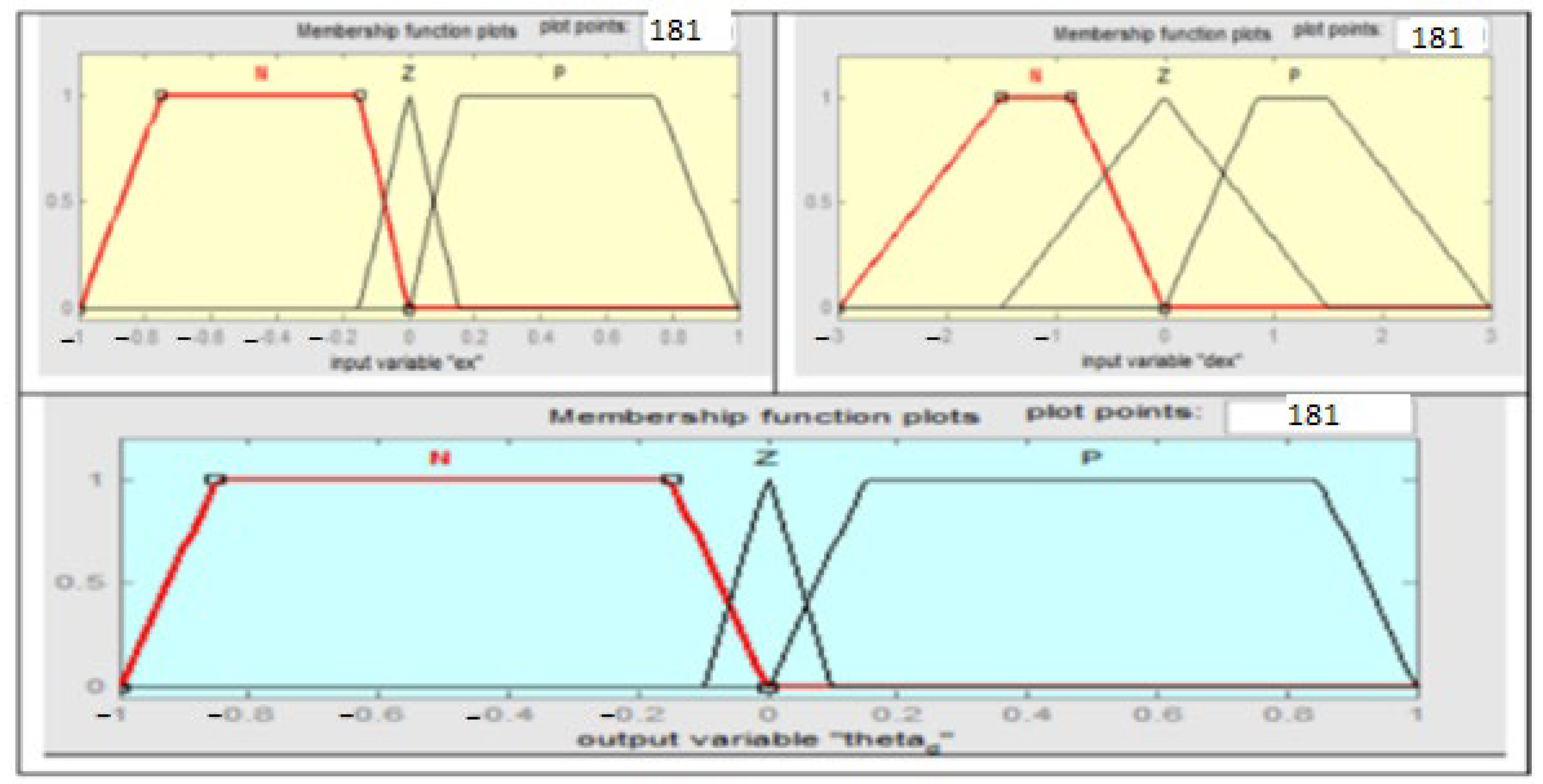
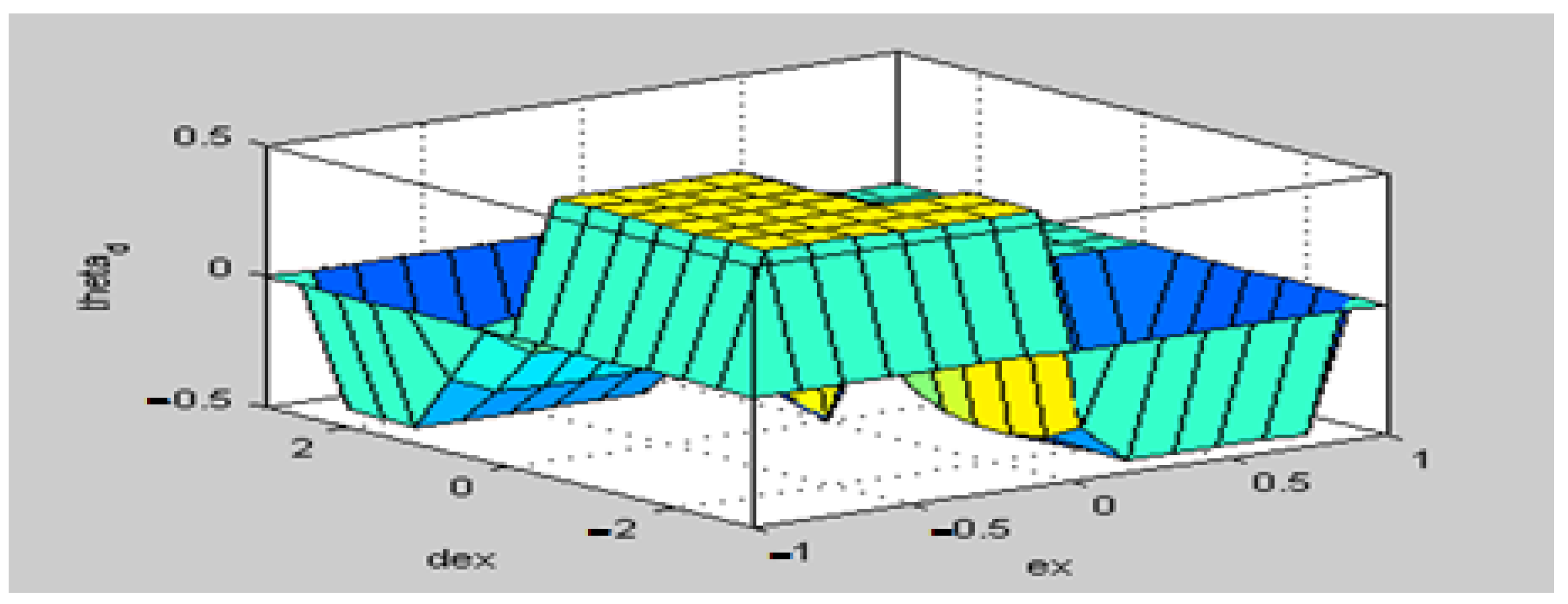
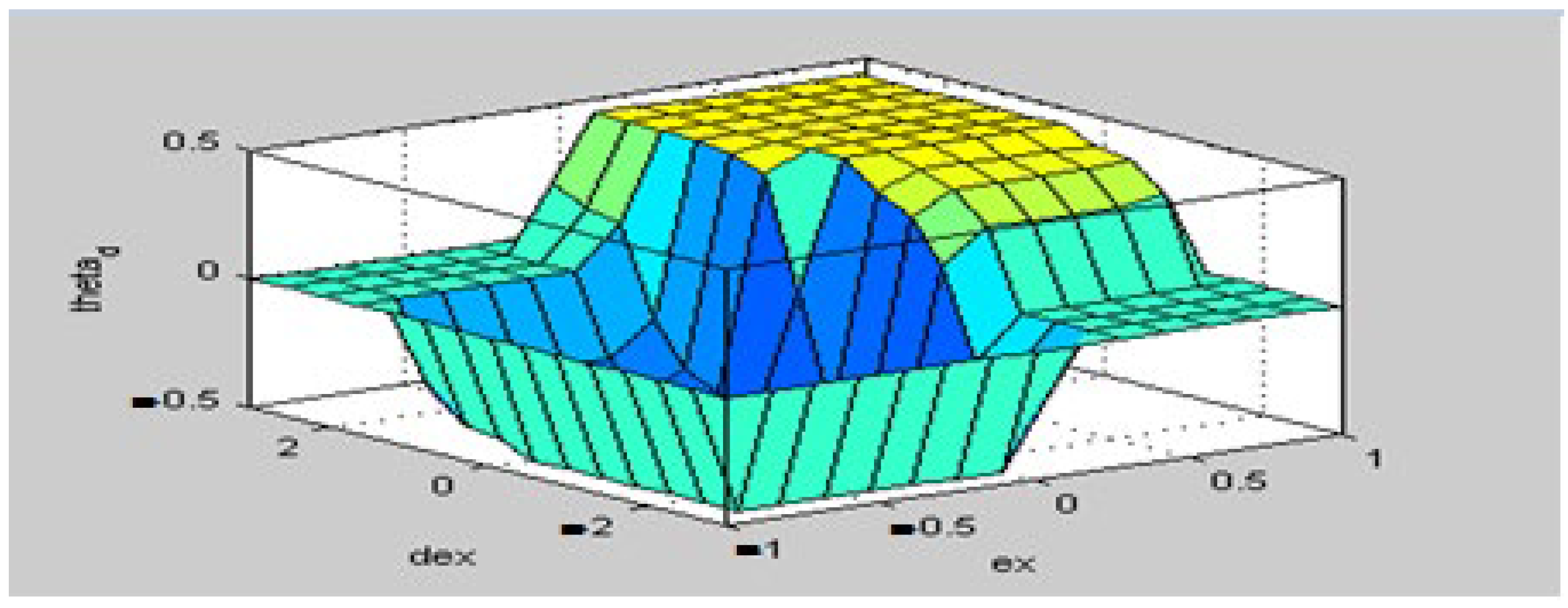
3.3. Fuzzy Logic Control System
- Error denotes the difference between the desired and measured signals.
- Derivative error is the error rate.
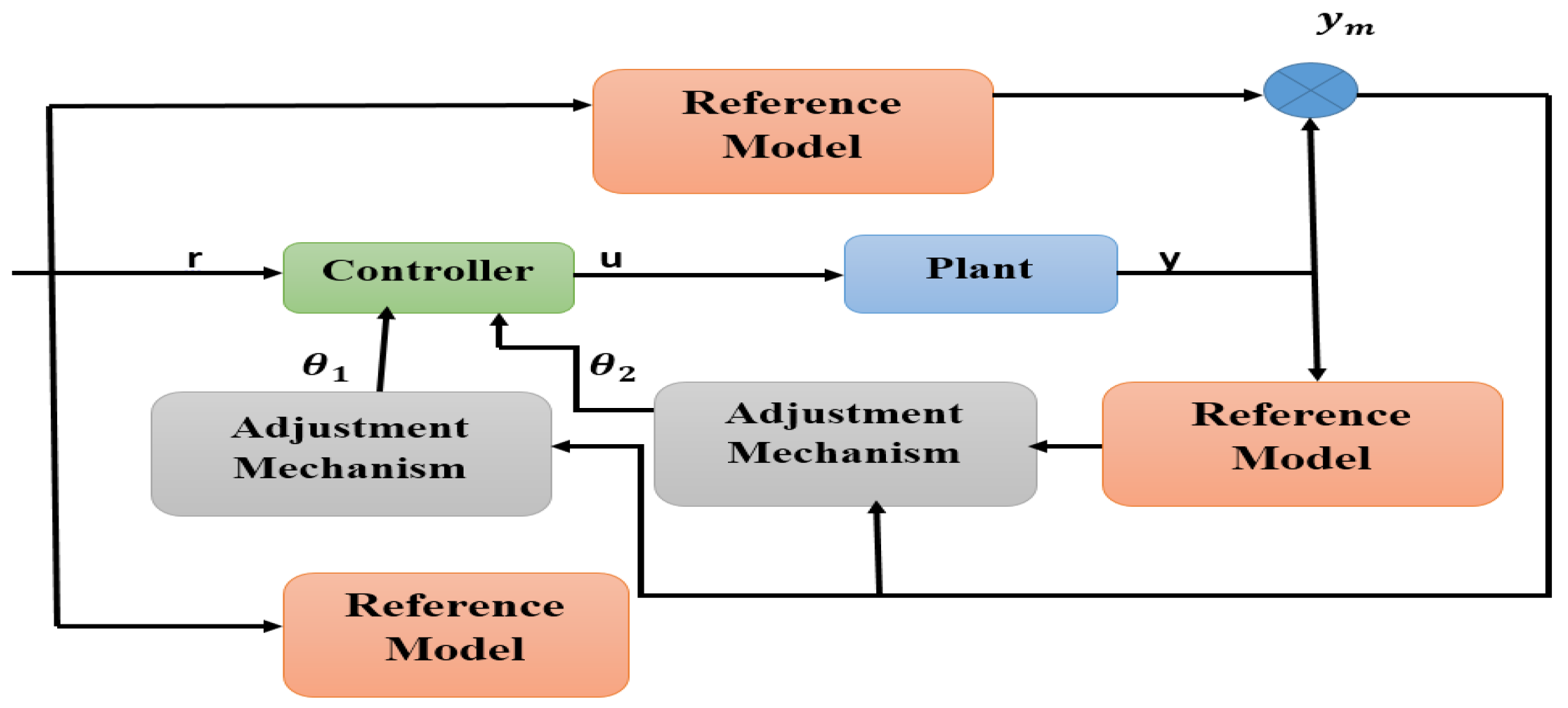
3.4. Model Reference Adaptive PID Control System Based on MIT Rule
- State the adaptive law of MRAC system for PID controller aswhere
- 2.
- State the tracking error e for the system aswhere is the system reference input.
- 3.
- As stated in Equation (34), estimate the adaption error .where denotes the plant output and denotes the reference model output.
- 4.
- As follows, describe the MIT rule, which is described as the temporal rate of change proportional to the cost function’s negative gradient.
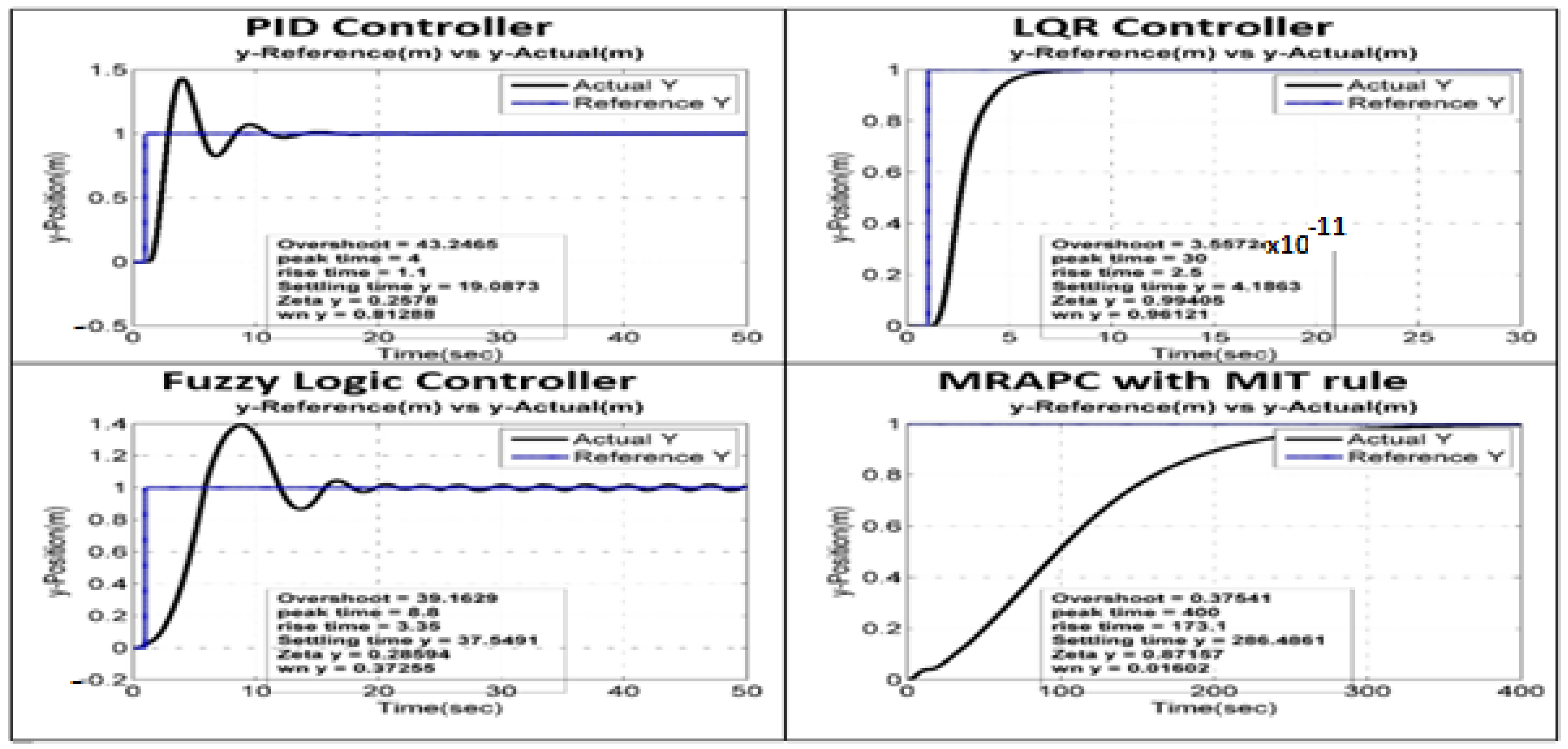
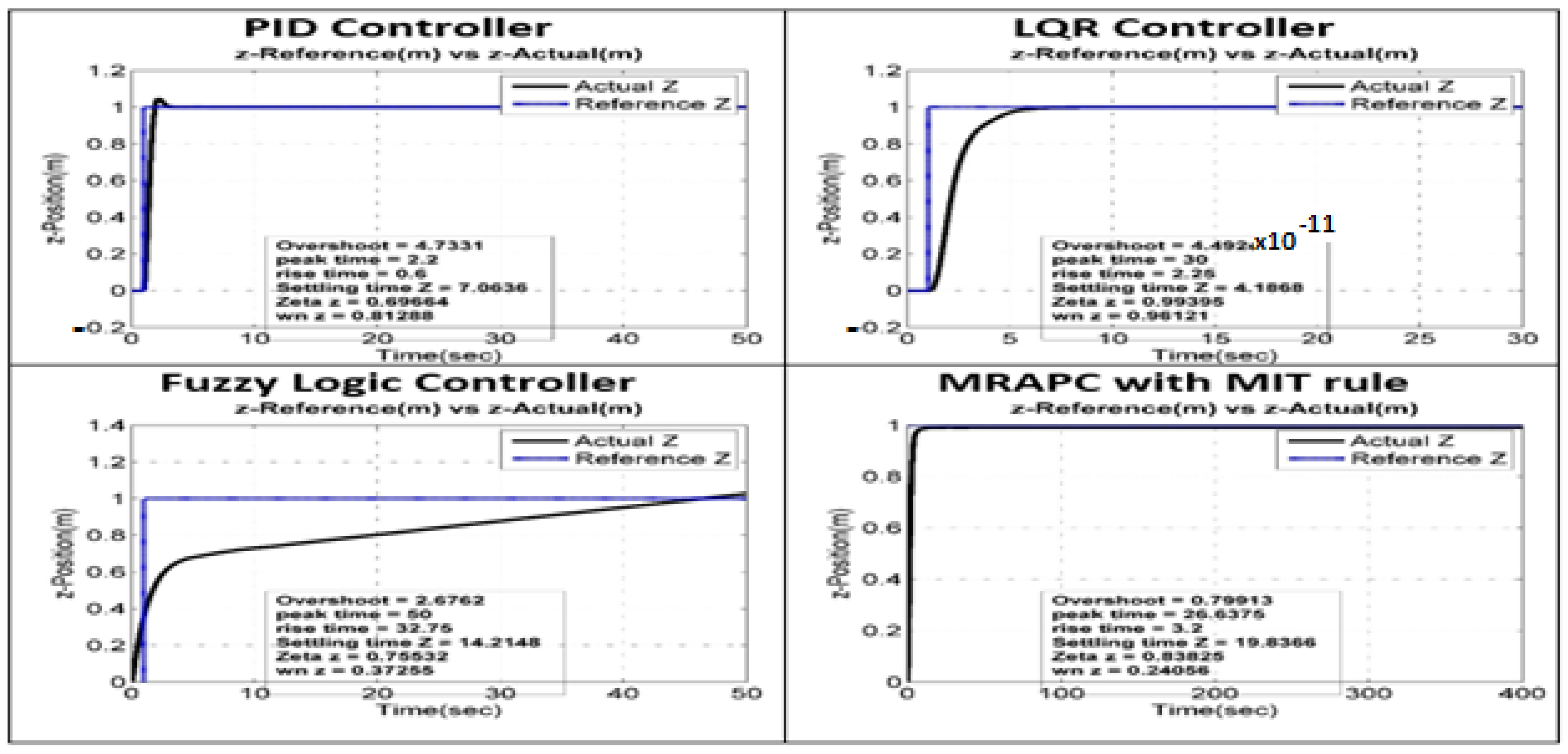
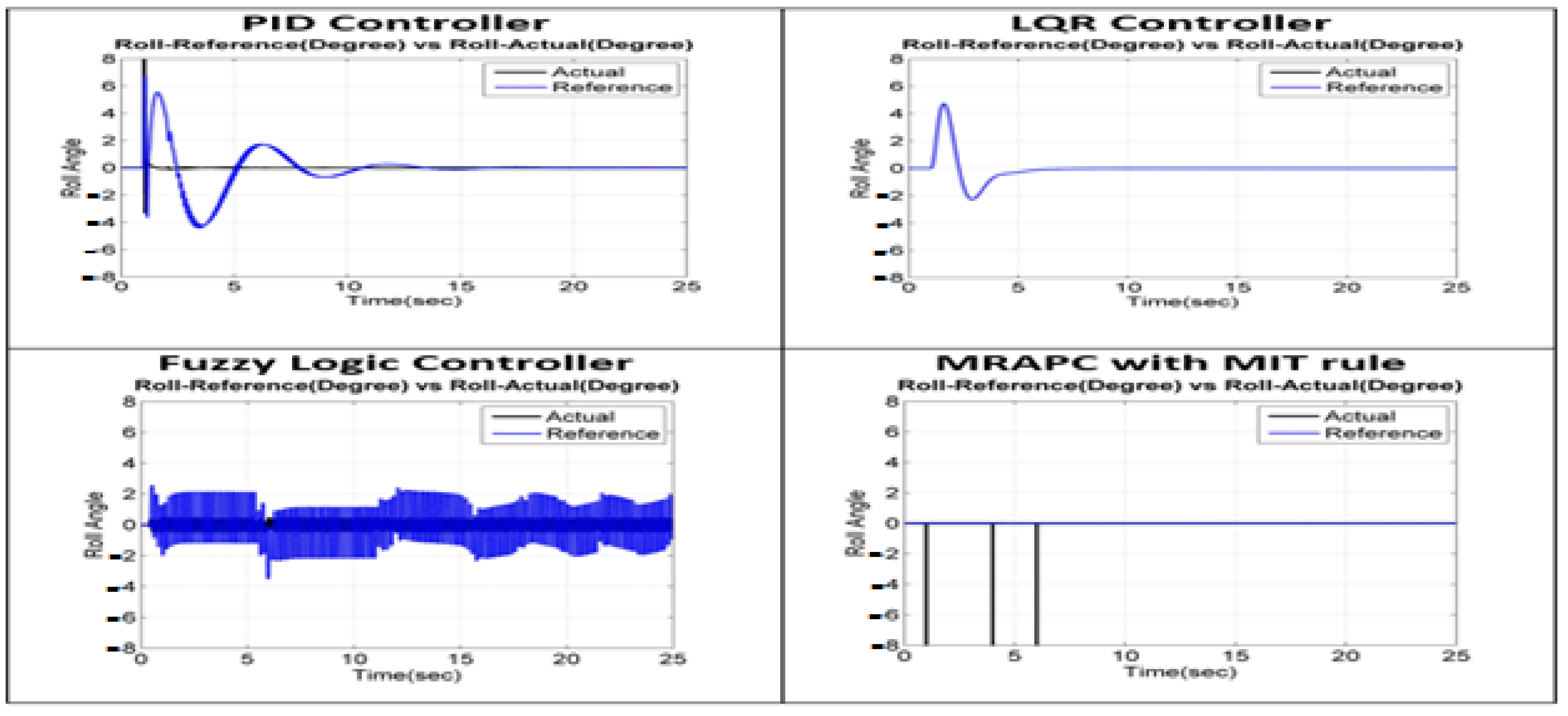
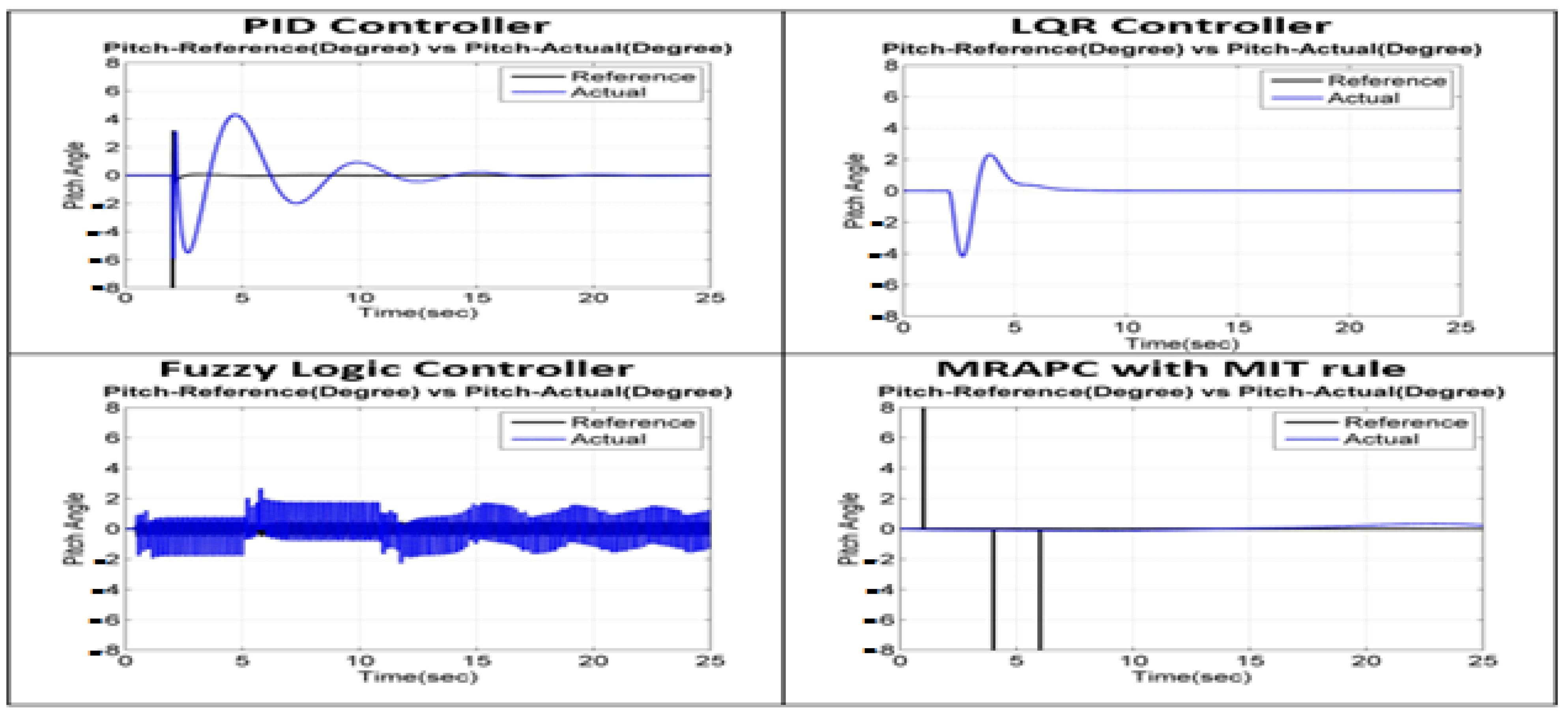
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Shakeel, T. Simulated Closed Loop Trajectory Control System of X3D Quadrotor in Ubiquitous Gesture Controlled Environment; COMSATS Institute of Information Technology: Lahore, Pakistan, 2016. [Google Scholar]
- Shehzad, M.F.; Bilal, A.; Ahmad, H. Position & attitude control of an aerial robot (quadrotor) with intelligent pid and state feedback lqr controller: A comparative approach. In Proceedings of the 16th International Bhurban Conference on Applied Sciences and Technology (IBCAST), Islamabad, Pakistan, 8–12 January 2019; pp. 340–346. [Google Scholar]
- Sain, D.; Mohan, B. Modeling, simulation and experimental realization of a new nonlinear fuzzy PID controller using Center of Gravity defuzzification. ISA Trans. 2021, 110, 319–327. [Google Scholar] [CrossRef] [PubMed]
- Zulu, A.; John, S. A review of control algorithms for autonomous quadrotors. Open J. Appl. Sci. 2014, 4, 547–556. [Google Scholar] [CrossRef]
- Al-Younes, Y.M.; Al-Jarrah, M.A.; Jhemi, A.A. Linear vs. nonlinear control techniques for a quadrotor vehicle. In Proceedings of the 7th International Symposium on Mechatronics and Its Applications, Sharjah, United Arab Emirates, 20–22 April 2010; pp. 1–10. [Google Scholar]
- Argentim, L.M.; Rezende, W.C.; Santos, P.E.; Aguiar, R.A. PID, LQR and LQR-PID on a quadcopter platform. In Proceedings of the 2013 International Conference on Informatics, Electronics and Vision (ICIEV), Dhaka, Bangladesh, 17–18 May 2013; pp. 1–6. [Google Scholar]
- Wang, H.; Gelbal, S.Y.; Guvenc, L. Multi-Objective Digital PID Controller Design in Parameter Space and Its Application to Automated Path Following. IEEE Access 2021, 9, 46874–46885. [Google Scholar] [CrossRef]
- Jiang, J.; Qi, J.; Song, D.; Han, J. Control platform design and experiment of a quadrotor. In Proceedings of the 32nd Chinese Control Conference, Xi’an, China, 26–28 July 2013; pp. 2974–2979. [Google Scholar]
- Khan, A.; Jaffery, M.H.; Javed, Y.; Arshad, J.; Rehman, A.U.; Khan, R.; Bajaj, M.; Kaabar, M.K. Hardware-in-the-Loop Implementation and Performance Evaluation of Three-Phase Hybrid Shunt Active Power Filter for Power Quality Improvement. Math. Probl. Eng. 2021, 2021, 8032793. [Google Scholar] [CrossRef]
- Raffo, G.V.; Ortega, M.G.; Rubio, F.R. An integral predictive/nonlinear H∞ control structure for a quadrotor helicopter. Automatica 2010, 46, 29–39. [Google Scholar] [CrossRef]
- Sarwar, S.; Javed, M.Y.; Jaffery, M.H.; Arshad, J.; Ur Rehman, A.; Shafiq, M.; Choi, J.-G. A novel hybrid MPPT technique to maximize power harvesting from pv system under partial and complex partial shading. Appl. Sci. 2022, 12, 587. [Google Scholar] [CrossRef]
- Menhaj, M.B.; Fakurian, R.S.F. Fuzzy controller design for quadrotor UAVs using minimal control input. Indian J. Sci. Res. 2014, 1, 157–164. [Google Scholar]
- Camboim, M.M.; Villanueva, J.M.M.; de Souza, C.P. Fuzzy Controller Applied to a Remote Energy Harvesting Emulation Platform. Sensors 2020, 20, 5874. [Google Scholar] [CrossRef]
- Ang, K.H.; Chong, G.; Li, Y. PID control system analysis, design, and technology. IEEE Trans. Control. Syst. Technol. 2005, 13, 559–576. [Google Scholar]
- Liu, C.; Pan, J.; Chang, Y. PID and LQR trajectory tracking control for an unmanned quadrotor helicopter: Experimental studies. In Proceedings of the 2016 35th Chinese Control Conference (CCC), Chengdu, China, 27–29 July 2016; pp. 10845–10850. [Google Scholar]
- Shi, L.; Zheng, W.X.; Shao, J.; Cheng, Y. Sub-super-stochastic matrix with applications to bipartite tracking control over signed networks. SIAM J. Control. Optim. 2021, 59, 4563–4589. [Google Scholar] [CrossRef]
- Shi, L.; Cheng, Y.; Shao, J.; Sheng, H.; Liu, Q. Cucker-Smale flocking over cooperation-competition networks. Automatica 2022, 135, 109988. [Google Scholar] [CrossRef]
- Zouaoui, S.; Mohamed, E.; Kouider, B. Easy tracking of UAV using PID controller. Period. Polytech. Transp. Eng. 2019, 47, 171–177. [Google Scholar] [CrossRef]
- Kuantama, E.; Tarca, I.; Tarca, R. Feedback linearization LQR control for quadcopter position tracking. In Proceedings of the 2018 5th International Conference on Control, Decision and Information Technologies (CoDIT), Thessaloniki, Greece, 10–13 April 2018; pp. 204–209. [Google Scholar]
- Chovancová, A.; Fico, T.; Duchoň, F.; Dekan, M.; Chovanec, Ľ.; Dekanova, M. Control methods comparison for the real quadrotor on an innovative test stand. Appl. Sci. 2020, 10, 2064. [Google Scholar] [CrossRef]
- Mahmoud, O.E.; Roman, M.R.; Nasry, J.F. Linear and nonlinear stabilizing control of quadrotor UAV. In Proceedings of the 2014 International Conference on Engineering and Technology (ICET), Cairo, Egypt, 19–20 April 2014; pp. 1–8. [Google Scholar]
- Canbek, K.O.; Oniz, Y. Trajectory Tracking of a Quadcopter Using Fuzzy-PD Controller. In Proceedings of the 2021 13th International Conference on Electrical and Electronics Engineering (ELECO), Bursa, Turkey, 25–27 November 2021; pp. 109–113. [Google Scholar]
- Salih, A.L.; Moghavvemi, M.; Mohamed, H.A.; Gaeid, K.S. Flight PID controller design for a UAV quadrotor. Sci. Res. Essays 2010, 5, 3660–3667. [Google Scholar]
- Aboelhassan, A.; Abdelgeliel, M.; Zakzouk, E.E.; Galea, M. Design and Implementation of Model Predictive Control Based PID Controller for Industrial Applications. Energies 2020, 13, 6594. [Google Scholar] [CrossRef]
- Ali, A.T.; Tayeb, E.B.M. Adaptive PID controller for DC motor speed control. Int. J. Eng. Invent. 2012, 1, 26–30. [Google Scholar]
- Bouabdallah, S. Design and Control of Quadrotors with Application to Autonomous Flying; Epfl: Lausanne, Switzerland, 2007. [Google Scholar]
- Espinoza-Fraire, T.; Saenz, A.; Salas, F.; Juarez, R.; Giernacki, W. Trajectory Tracking with Adaptive Robust Control for Quadrotor. Appl. Sci. 2021, 11, 8571. [Google Scholar] [CrossRef]
- Jaffery, M.H. Precision Landing and Testing of Aerospace Vehicles; University of Surrey: Guildford, UK, 2012. [Google Scholar]
- Yue, M.; An, C.; Sun, J. Zero dynamics stabilisation and adaptive trajectory tracking for WIP vehicles through feedback linearisation and LQR technique. Int. J. Control. 2016, 89, 2533–2542. [Google Scholar] [CrossRef]
- Choudhury, S.; Acharya, S.K.; Khadanga, R.K.; Mohanty, S.; Arshad, J.; Ur Rehman, A.; Shafiq, M.; Choi, J.-G. Harmonic Profile Enhancement of Grid Connected Fuel Cell through Cascaded H-Bridge Multi-Level Inverter and Improved Squirrel Search Optimization Technique. Energies 2021, 14, 7947. [Google Scholar] [CrossRef]
- Sampath, B.; Perera, K.; Wijesuriya, W.; Dassanayake, V. Fuzzy based stabilizer control system for quad-rotor. Int. J. Mech. Aerosp. Ind. Mechatron. Eng. 2014, 8, 455–461. [Google Scholar]
- Bhatkhande, P.; Havens, T.C. Real time fuzzy controller for quadrotor stability control. In Proceedings of the 2014 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE), Beijing, China, 6–11 July 2014; pp. 913–919. [Google Scholar]
- Ghamri, R. Design of an Adaptive Controller for Magnetic Levitation System Based Bacteria Foraging Optimization Algorithm. Master’s Thesis, Islamic University, Islamabad, Pakistan, 2014. [Google Scholar]
- Pankaj, S.; Kumar, J.S.; Nema, R. Comparative analysis of MIT rule and Lyapunov rule in model reference adaptive control scheme. Innov. Syst. Des. Eng. 2011, 2, 154–162. [Google Scholar]
- Korul, H.; Tosun, D.C.; Isik, Y. A Model Reference Adaptive Controller Performance of an Aircraft Roll Altitude Control System. In Recent Advances on Systems, Signals, Control, Communications and Computers; WSEAS: Attica, Greece, 2015; pp. 971–978. [Google Scholar]
- Roy, R.; Islam, M.; Sadman, N.; Mahmud, M.; Gupta, K.D.; Ahsan, M.M. A Review on Comparative Remarks, Performance Evaluation and Improvement Strategies of Quadrotor Controllers. Technologies 2021, 9, 37. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Controllers | Strengths | Limitation |
|---|---|---|
| PID | Gain selection is simple; steady-state error can be avoided. | Cannot deal with disturbance or noise, and cannot handle multiple configurations simultaneously. |
| LQR | It can handle many inputs and outputs. | Not able to overcome steady-state errors. |
| Backstepping | The model must be systematic and recursive; a precise model is not essential. It can control system nonlinearities, overcome inadequate disturbances, and guarantee stability. | Over-parameterization; selecting appropriate parameters is difficult. |
| Fuzzy Logic | It provides a viable solution to a complex and uncertain model and does not demand a precise model. | Control rules and system analysis are difficult to develop. It takes a long time to adjust the parameters. |
| When the system is multivariable and the channels are cross-coupled, it performs well. | A well-designed model is required. | |
| Sliding Mode Controller (SMC) | The performance of high nonlinearity is excellent. Less sensitivity to perturbations and uncertainty in the model. | The chattering problem can lead to system instability. |
| Model Predictive Control (MPC) | Predicts future state behaviors; works with multiple input and output simultaneously; can manage input and output constraints; and noise and disruptions are not a challenge. | Tracking is slow. |
| Adaptive Controller | When parameters are uncertain, the dynamic and disturbance model are always changing; engineering effectiveness is comparably acceptable. | It takes time to adapt to the new parameters. |
| Parameters | Symbol | Value |
|---|---|---|
| Quadrotor Mass | m | 0.54 |
| Gravity Acceleration | g | 9.807 |
| Arm length of Quadrotor | L | 0.225 m |
| Inertia Moment | 0.022 0.022 0.0018 |
| Parametric Gain | Controllers | ||
|---|---|---|---|
| PID Altitude (Z) | PID (X, Y) | ||
| KP | 1.5 | 2 | 1 |
| KI | 0 | 0 | 0 |
| KD | 0.5 | 1 | 0.1 |
| Error (e) | ||||
|---|---|---|---|---|
| Rate of Error (de) | ||||
| P | Z | N | ||
| P | P | P | Z | |
| Z | P | Z | N | |
| N | Z | N | N | |
| P | Z | N | ||
| P | Z | Z | N | |
| Z | Z | N | P | |
| N | N | P | P | |
| Parameters | Values |
|---|---|
| Settling time | 20s |
| Damping ratio | 0.707 |
| Steady-state error | 0% |
| Controllers | Performance Index (x-axis) | |||||
|---|---|---|---|---|---|---|
| Setting Time | Rise Time | Overshoot (%) | Peak Time | RMS Error | NRMS Error | |
| PID | 24.3 | 1.2 | 4.2 | 5.1 | 0.16 | 0.11 |
| LQR | 4.18 | 2.55 | 0.0 | 30 | 0.21 | 0.21 |
| Fuzzy Logic | 36.48 | 3.15 | 38.64 | 8.8 | 0.23 | 0.17 |
| MRAPC with MIT | 17.24 | 7.1 | 119.58 | 22.5 | 0.22 | 0.10 |
| Controllers | Performance Index (y-axis) | |||||
|---|---|---|---|---|---|---|
| Setting Time | Rise Time | Overshoot (%) | Peak Time | RMS Error | NRMS Error | |
| PID | 19.08 | 1.1 | 43.2 | 4 | 0.17 | 0.12 |
| LQR | 4.18 | 2.5 | 0.0 | 30 | 0.21 | 0.21 |
| Fuzzy Logic | 37.54 | 3.35 | 39.162 | 8.8 | 0.24 | 0.18 |
| MRAPC with MIT | 170.74 | 104.7 | 8.8 | 213.1 | 0.425 | 0.426 |
| Controllers | Performance Index (z-axis) | |||||
|---|---|---|---|---|---|---|
| Setting Time | Rise Time | Overshoot (%) | Peak Time | RMS Error | NRMS Error | |
| PID | 7.06 | 0.6 | 4.7 | 2.2 | 0.08 | 0.08 |
| LQR | 4.16 | 2.25 | 0.0 | 30 | 0.18 | 0.18 |
| Fuzzy Logic | 14.21 | 32.75 | 2.67 | 50 | 0.814 | 0.815 |
| MRAPC with MIT | 21.86 | 3.3 | 0.77 | 26.85 | 0.056 | 0.056 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shakeel, T.; Arshad, J.; Jaffery, M.H.; Rehman, A.U.; Eldin, E.T.; Ghamry, N.A.; Shafiq, M. A Comparative Study of Control Methods for X3D Quadrotor Feedback Trajectory Control. Appl. Sci. 2022, 12, 9254. https://doi.org/10.3390/app12189254
Shakeel T, Arshad J, Jaffery MH, Rehman AU, Eldin ET, Ghamry NA, Shafiq M. A Comparative Study of Control Methods for X3D Quadrotor Feedback Trajectory Control. Applied Sciences. 2022; 12(18):9254. https://doi.org/10.3390/app12189254
Chicago/Turabian StyleShakeel, Tanzeela, Jehangir Arshad, Mujtaba Hussain Jaffery, Ateeq Ur Rehman, Elsayed Tag Eldin, Nivin A. Ghamry, and Muhammad Shafiq. 2022. "A Comparative Study of Control Methods for X3D Quadrotor Feedback Trajectory Control" Applied Sciences 12, no. 18: 9254. https://doi.org/10.3390/app12189254