
Simulating 3D Human Postural Stabilization in Vibration and Dynamic Driving
by
 , , , and
, , , and
Mojtaba Mirakhorlo
1, 
Nick Kluft
1,2,
Raj Desai
1,
Marko Cvetković
1,
Tugrul Irmak
1,
Barys Shyrokau
1 and
and
Riender Happee
1,* 1
Faculty of Mechanical, Maritime & Materials Engineering, Cognitive Robotics, Delft University of Technology, 2628 CN Delft, The Netherlands
2
Faculty of Behavioural and Movement Sciences, Vrije Universiteit Amsterdam, 1021 JB Amsterdam, The Netherlands
*
Author to whom correspondence should be addressed.
Appl. Sci. 2022, 12(13), 6657; https://doi.org/10.3390/app12136657
Submission received: 19 May 2022
/
Revised: 26 June 2022
/
Accepted: 28 June 2022
/
Published: 30 June 2022
(This article belongs to the Special Issue Comfort Congress 2021)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:Featured Application
Motion comfort of automated driving and other transportation modes.
Abstract
In future automated vehicles we will often engage in non-driving tasks and will not watch the road. This will affect postural stabilization and may elicit discomfort or even motion sickness in dynamic driving. Future vehicles will accommodate this with properly designed seats and interiors, whereas comfortable vehicle motion will be achieved with smooth driving styles and well-designed (active) suspensions. To support research and development in dynamic comfort, this paper presents the validation of a multi-segment full-body human model, including visuo-vestibular and muscle spindle feedback, for postural stabilization. Dynamic driving is evaluated using a “sickening drive”, including a 0.2 Hz 4 m/s2 slalom. Vibration transmission is evaluated with compliant automotive seats, applying 3D platform motion and evaluating 3D translation and rotation of pelvis, trunk and head. The model matches human motion in dynamic driving and reproduces fore–aft, lateral and vertical oscillations. Visuo-vestibular and muscle spindle feedback are shown to be essential, in particular, for head–neck stabilization. Active leg muscle control at the hips and knees is shown to be essential to stabilize the trunk in the high-amplitude slalom condition but not with low-amplitude horizontal vibrations. However, active leg muscle control can strongly affect 4–6 Hz vertical vibration transmission. Compared to the vibration tests, the dynamic driving tests show enlarged postural control gains to minimize trunk and head roll and pitch and to align head yaw with driving direction. Human modelling can enable the insights required to achieve breakthrough comfort enhancements, while enabling efficient developments for a wide range of driving conditions, body sizes and other factors. Hence, modelling human postural control can accelerate the innovation of seats and vehicle motion-control strategies for (automated) vehicles.
1. Introduction
Automated vehicles provide opportunities for performing non-driving tasks, such as reading books and looking at screens, during the ride. Users will often take their eyes off the road, hampering verticality perception and anticipation of vehicle motion. This will affect postural stabilization and may elicit discomfort and even cause more severe and/or frequent motion sickness [1]. The postural response of the human body to vehicle motion is of great value for studying human motion comfort. Deeper knowledge of postural stabilization and its relationship to motion comfort is particularly relevant for motion planning [2] and active suspension control [3]. Future (automated) vehicles shall accommodate these new requirements with the design of seats [4] and interiors [5]. Biomechanical modelling of the human body can reveal underlying mechanisms, such as postural stabilization, and models predicting human movements and comfort can support vehicle design. Such models can potentially also shed light on the postural instability theory which associates motion sickness with disturbed postural stabilization [6].
Biomechanical models, according to various approaches, have been developed and validated to study seat interaction. Multibody and/or finite element models have been used to study impact conditions in full 3D. Lumped approaches (incorporating mass, spring and damper elements, generally in single-axis motion) have been used to compute the forces on a seat, usually during vertical and less often during fore–aft motions [7,8,9]. Three-dimensional multibody models represent the human body with multiple segments [10,11,12], whereas finite element models capture soft tissue and seat deformation in more detail [13,14]. Due to computational efficiency, multibody models are more commonly used to investigate the effects of factors such as human weight, road class and vehicle speed on human postural response in different motion directions [12]. Previous comfort-oriented full-body models have focused mostly on the vertical [15] and fore–aft [7] directions, but simulation of lateral movements is also essential. A recent multibody model captured combined lateral, vertical and roll vibrations in terms of apparent mass but was not validated in terms of predicted head and trunk motion [16]. Inverse dynamic musculoskeletal models have been used to analyze factors such as joint forces and muscular activity [15,17,18]. However, inverse models have limitations in the context of designing seat and vehicle control strategies as they are not able to predict body motions and body-response forces.
Besides the body’s response to seat vibration, on which many previous studies have focused, head control strategies are essential for motion comfort. The perception of head motion by vestibular organs and vision plays a significant role in (dis)comfort and motion sickness [19]. The head control objectives are suggested to be partly conflicting, as head motion can be controlled relative to trunk or space, dependent on motion conditions and task. Previously, an advanced neck model that included the vestibulocollic reflex (VCR), the cervicocollic reflex (CCR) and neck muscle co-contraction was validated [20,21]. Visuo-vestibular and muscle spindle feedback mechanisms were shown to be essential, in particular, for head–neck stabilization. In order to predict head motions in the presence of seat vibrations and dynamic motions, 3D full-body models that include these mechanisms are required. In the current study, a full-body model has been validated in fore–aft, lateral, and vertical perturbations and slalom dynamic motion and has been used to study the effects of active leg, lumbar and neck stabilization.
2. Materials and Methods
2.1. Human Model
The human active model (version 3.3), as distributed with MADYMO 2022, was adopted using Matlab and Simulink for running simulations and post-processing. The model was developed and validated primarily to simulate high-severity crashes [22,23,24,25] and extended with postural stabilization for low-severity conditions [26,27,28,29]. It represents a mid-size male adult of 75 kg, 1.76 m standing height and 0.92 m erect sitting height. The model includes active controllers to stabilize body segments, with adjustable feedback parameters specified for each body segment. These parameters manipulate the feedback gains of postural controllers. The head orientation can be controlled relative to a global coordinate reference system, resulting in so called “head-in-space” control founded on visual and vestibular motion perception or alternatively relative to a local segment, such as the trunk, resulting in “head-on-trunk” control associated with muscle spindle feedback. Feedback can also be selected to be relative to another body, such as the vehicle, representing head orientation in vehicle control. The suitability of these alternative control strategies to capture head postural control is described in the Results and Discussion sections.
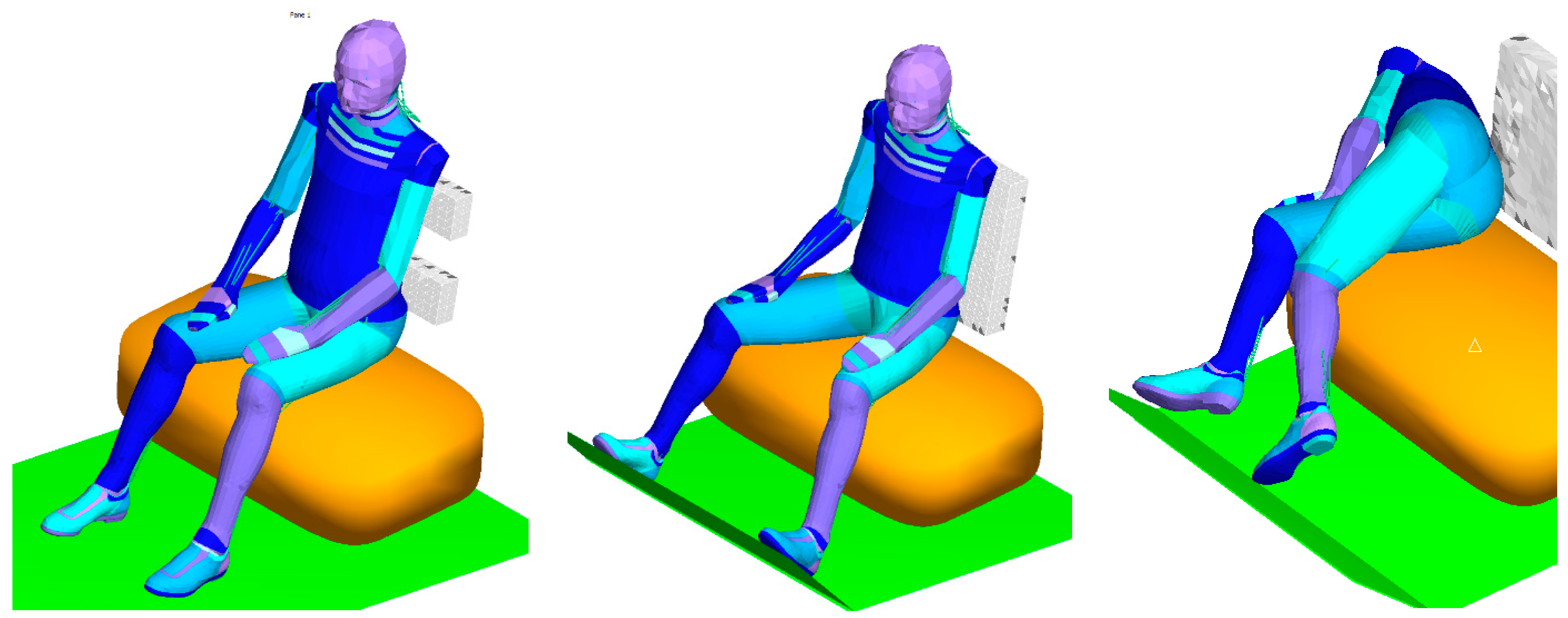
Recorded vehicle or seat motion was applied to the seat and floor, which interact with the body through contact with feet, seat cushion and seat back. The model interacted with the seat cushion and floor using multibody contact surfaces, and gravity was simulated. Details were provided in our previous study [30]. In the current study, finite elements were used to model the compliant seat back (Figure 1). Friction was set at 1.6 for the seat and 1.5 for the seat back in the slalom and at 1.2 for the seat and the seat back in the vibration simulations. In both cases, the results were not overly sensitive to the applied friction. In alignment with the actual experiment, no seat belts were simulated, whereas modern belts would have very limited effects in normal driving.
2.2. Scenarios
The model has been validated in two scenarios:
In both experiments, human 3D full-body motion (translational and rotational) was recorded with an XSENS motion suit. For both experiments, we selected eyes-open conditions with visual perception of the vehicle interior and the world in the slalom (windows not blocked) and the vehicle interior and the lab in the vibration tests. It is to be noted that vision generally has modest effects on postural stabilization [32,33,34] but has very strong effects on motion sickness [35]. In the slalom experiment, external vision strongly reduced motion sickness as compared to internal vision, whereas the effect on head roll was not significant [1]. In the vibration experiment, the eyes-closed condition elicited up to 25% more head rotation between 1–2 Hz, and no sickness was encountered in any condition due to the limited exposure time and amplitude [31].
The slalom experiment was primarily designed to induce motion sickness. Subjects were driven with slaloms of 3.5 m amplitude at a frequency around 0.2 Hz leading to peak lateral accelerations of 4 m/s2 while seated in the middle of the rear seat of a Toyota Prius [1]. Motion was simulated by importing accelerations of the vehicle in lateral (Y) and fore–aft (X) direction as well as the yaw angle of the vehicle in space. Here, we simulated the initial postural response before motion sickness emerged. In the experiment, head roll increased over time, with around 50% over 30 min, whereas the additional effect of sickness was small (9%) and not significant among the 11 participants for whom motion data were available.
The vibration experiment was designed to investigate the effect of sitting posture and backrest height [30]. In this paper, we simulated an erect posture with a high back-rest condition, with 0.3 m/s2 rms platform acceleration. Motion was simulated by applying the measured platform acceleration. The frequency domain transmission from platform to body segment (head, trunk and pelvis) acceleration was determined using a Hanning window with 15 segments (i.e., a window size of 24 s), with 50 percent overlap [31].
The postural control gains for neck, spine and hips were optimized, fitting the experimental data, whereas arm and knee control parameters were adapted accordingly. Control gains were separately fitted for the slalom and for the fore–aft vibration. For lateral and vertical vibration, we present results using parameters fitted for the fore–aft vibration. Hence, we assume postural control strategies to vary with seat motion amplitude but not with seat motion direction.
3. Results
3.1. Slalom Validation
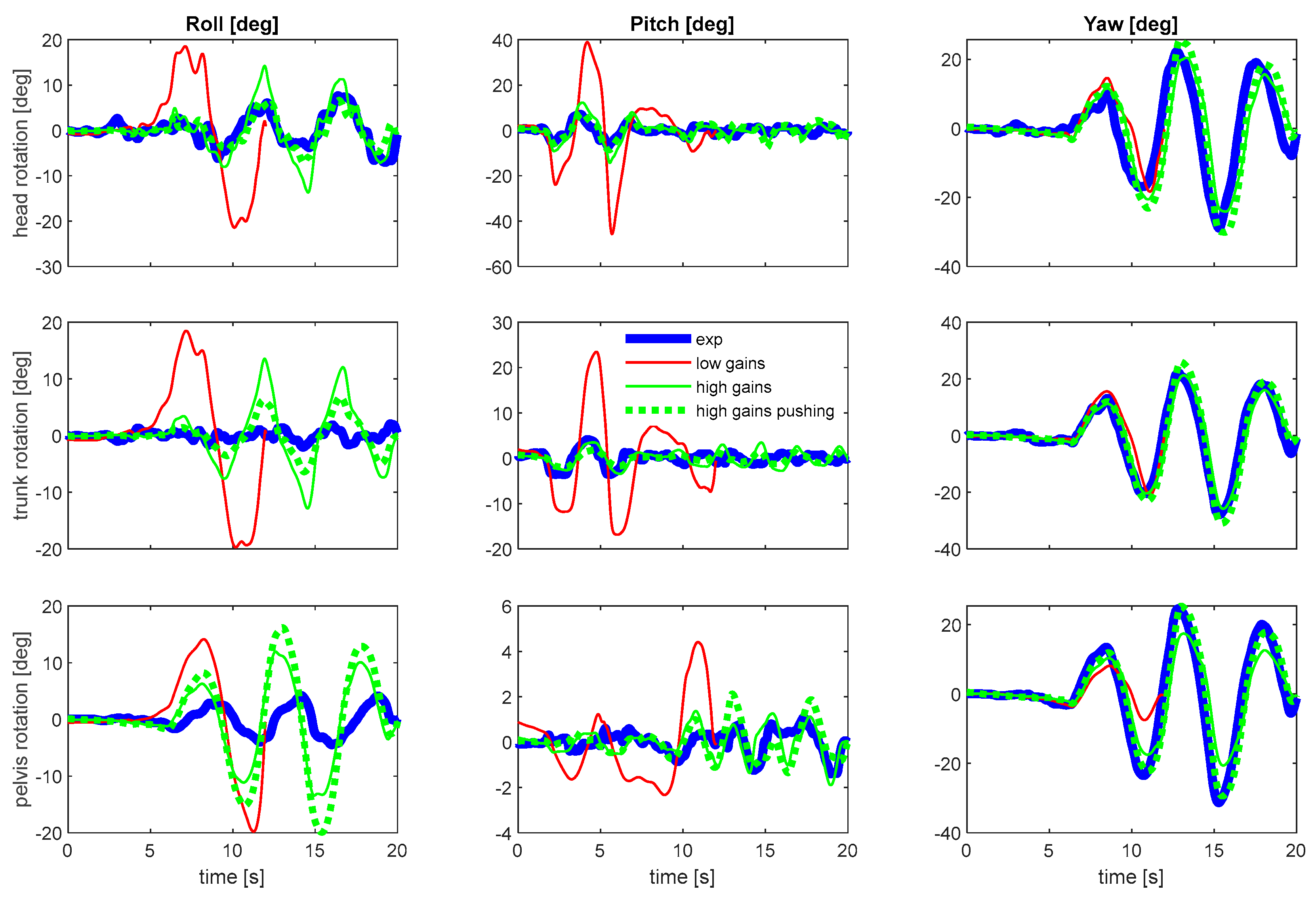
High postural feedback gains were needed to stabilize the trunk and to obtain realistic head motions in the slalom (Figure 2). Lower postural gains resulted in excessive trunk and head rotation, and eventually the body simply rolled and fell (Figure 1—right). Without active leg control, the body rolled and fell even earlier. Hip and knee joint feedback control helped to reduce pelvis roll and pitch, spine control reduced trunk rotation and neck control reduced head rotation. In addition to such a reactive postural stabilization, we implemented a constant hip and knee extension activity, pushing the trunk into the seat back and pushing the thighs into the seat. This pushing activity reduced trunk pitch and strongly reduced trunk roll (Figure 2). The reduced trunk roll can be attributed to the seat back friction being more effective due to pushing. This was confirmed in an additional simulation with pushing of legs but without seat back friction, which again led to excessive trunk rotation and falling.
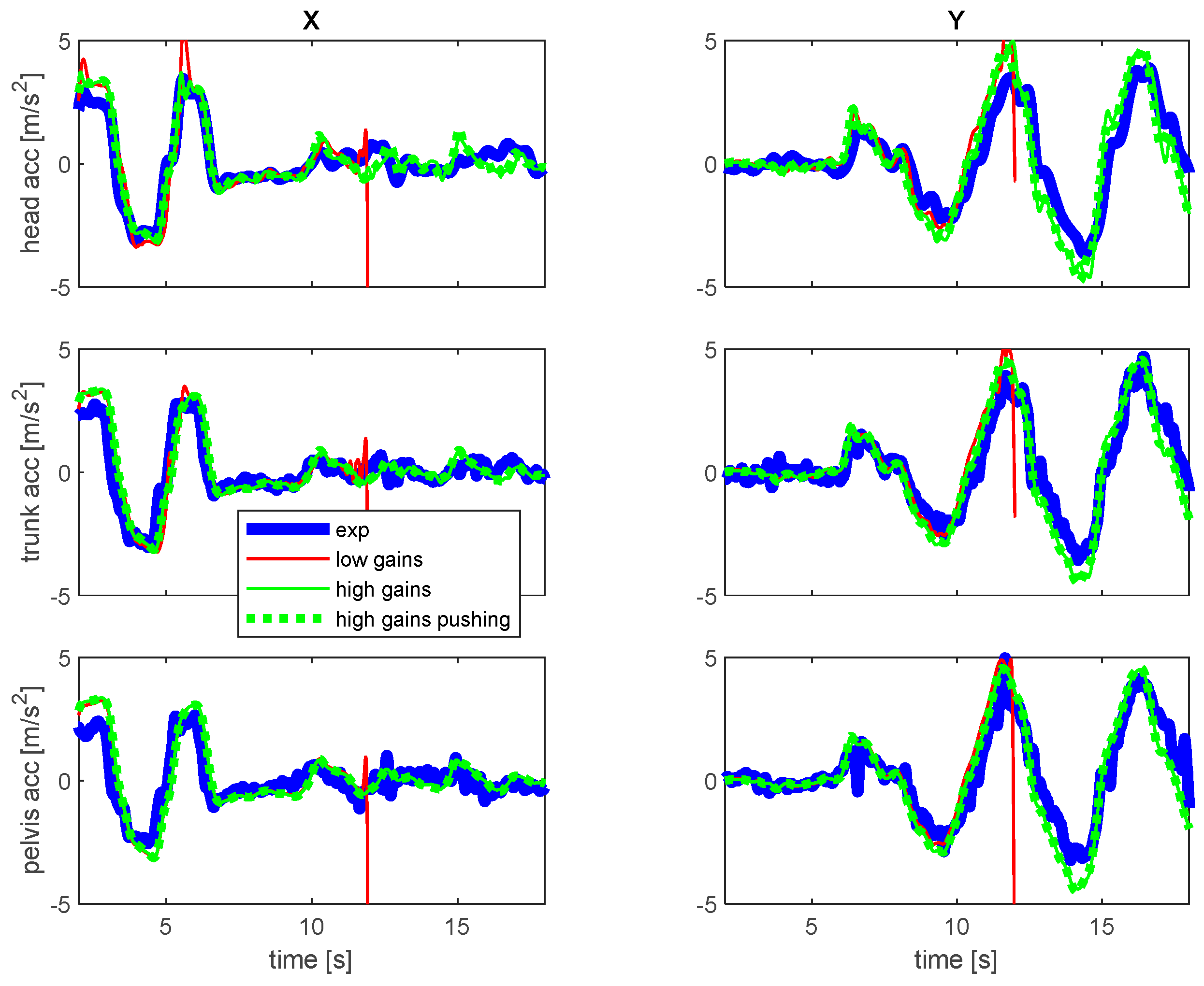
With high postural control gains and pushing of legs, head roll fitted the measured data well, while trunk and pelvis roll were overestimated by the model. Head yaw followed the measured yaw with a short delay. As described in the Introduction, three head–neck control strategies were compared. As expected, head-in-space control yielded an unrealistic low head yaw motion where the controller tried to minimise head yaw while the vehicle was turning. Good results were found with head-on-trunk control (Figure 2), while very similar results were found with head-in-car control. Thus, our current results cannot discriminate the realism of the latter two control strategies. The results for acceleration show a good fit with high postural gains (Figure 3) and are not very sensitive to postural control gains and leg pushing.
3.2. Vibration Validation
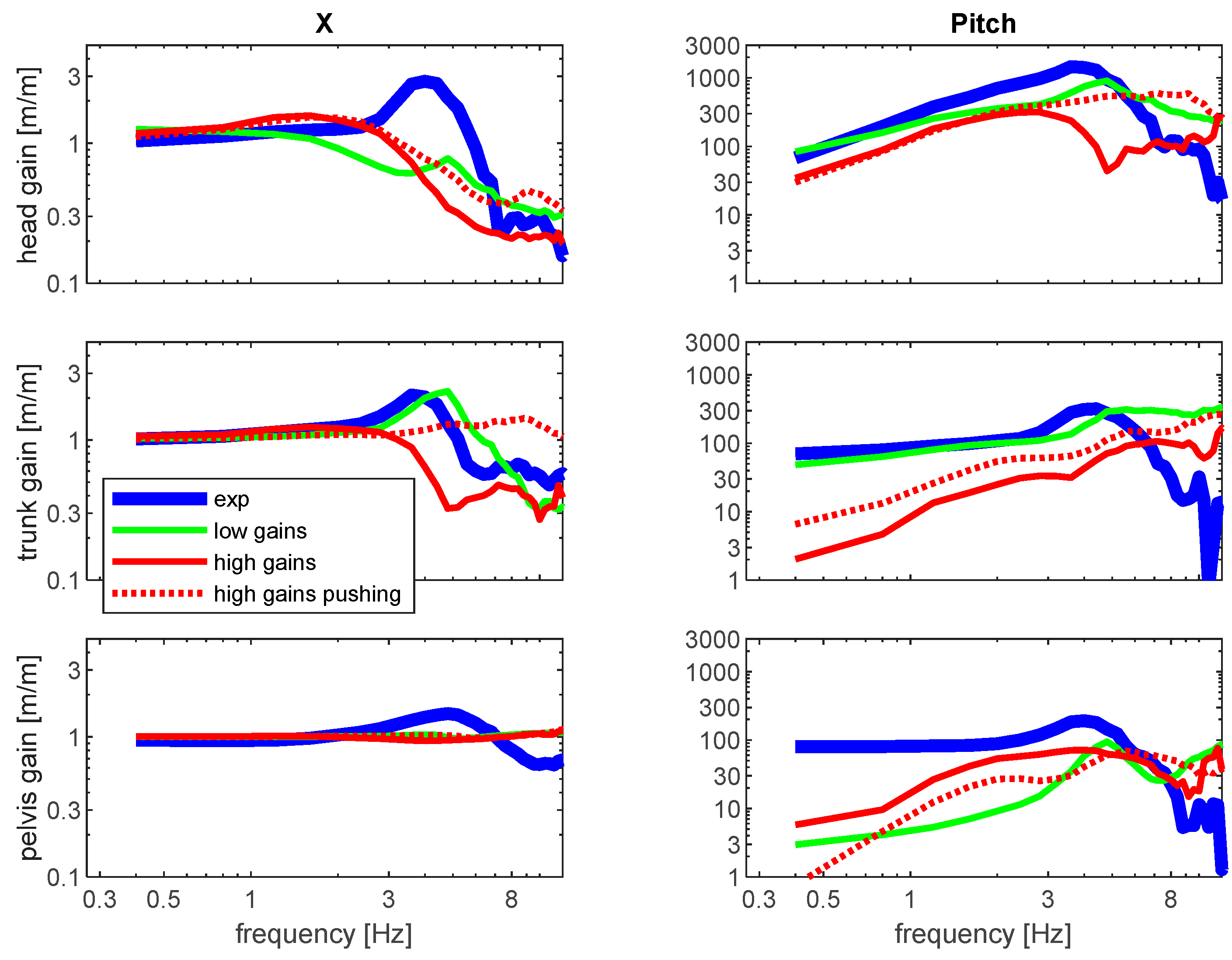
Frequency domain responses of body segments (head, trunk and pelvis) were validated for both translational and rotational body segment motion in fore–aft (Figure 4), lateral (Figure 5) and vertical (Figure 6) vibrations. Reduced neck and spine postural control gains were found to optimally predict head and trunk rotation. Hip and knee control gains were set at minimal levels such that they hardly affected the frequency domain results but prevented lateral drift of the knees. Arm control gains were set at zero level, in line with the applied instruction to relax the arms with hands resting on the thighs.
The best fit parameters with low postural gains (green lines) provided a much better fit as compared to the high gains fitted towards the slalom data (red and red dotted lines). Translational responses closely matched the 5 Hz oscillation in vertical vibration in the pelvis, trunk and head and matched the lateral response well for the head, while underestimating trunk translation. In fore–aft vibration, the 4–5 Hz peak was well-reproduced for the trunk but underestimated for the head. Rotational responses for head and trunk matched the measured kinematics, but pelvis rotation was strongly underestimated.
The high postural control gains fitted towards the slalom provided unrealistic low rotations of head and trunk and increased the peak frequency and amplitude of vertical vibrations. This effect was even stronger with high postural control gains and legs pushing the body into the seat back and the thighs into the seat. This shows that while active leg stabilization is not essential to stabilize body roll and pitch with low motion amplitudes, the legs can strongly affect vertical vibration transmission. Increasing the arm postural control gains from zero to 0.5 notably affected trunk acceleration and rotation in fore–aft and vertical vibrations (not shown). This can be explained by the resulting stiffening of the shoulder complex coupling the arm inertia to the trunk.
These results were obtained using a head orientation-in-space control strategy and were slightly more realistic than when using head-on-trunk control. As the seat and cabin were not rotating in space, the head-in-car control strategy would be equivalent to head-in-space and was therefore not evaluated.
4. Discussion
To our knowledge, this paper presents the first full-body model validation for 3D head, trunk and pelvis motion combining dynamic driving and vibrations in fore–aft, lateral and vertical directions. The results showed that the slalom simulation (4 m/s2 cornering) matched the measured data fairly well. The model also correctly predicted frequency domain responses with 0.3 m/s2 vibrations.
Slalom simulations showed a good prediction of body segment rotations (Figure 2) and accelerations (Figure 3). Trunk and pelvis yaw were well predicted, but the model’s predicted head yaw was delayed compared to the measured head yaw. We attribute this delay to the fact that the subjects looked into the corner during the slalom [36].
In addition to the dynamic driving condition (slalom), the model responses to vibrations were tested in the frequency domain. Gain responses of body segments (head, trunk and pelvis) well matched the 3D measured motion. However, pelvis rotational responses were underestimated by the model.
Modelling the slalom without active leg control resulted in excessive trunk and head roll (Figure 2), and the model eventually fell from the seat after two cycles of slalom (Figure 1—right). These results show the relevance of active leg control in lateral body stabilization in dynamic driving. However, with low amplitude vibrations, active leg control hardly affected responses to fore–aft and lateral motion. This indicates the trunk to be mainly stabilized by the seat and the seat back in low-amplitude loading. However, vertical vibrations revealed a strong effect of leg control with 4–6 Hz oscillations when leg control gains were enlarged and the effect of legs pushing into the seat was simulated. Leg control stiffens the hips and thereby enlarges the contribution of seat-to-thigh contact to vertical vibration transmission. Leg pushing also enlarges the contribution of the seat back in vertical vibration transmission.
The required neck and spine postural control gains for a good fit with experimental data were much higher in the slalom as compared to the vibration scenario. It seems that postural stabilization is more active in intense dynamic maneuvers. With advanced postural control models [18], we will further quantify the contribution of visual, vestibular and muscle spindle feedback in postural stabilization, including adaptation to motion amplitude.
There is room for improving the model responses, in particular, for the hip, pelvis and lower back region. As a next step, we aim to improve the model fit by measuring and implementing seat characteristics. Further experiments with advanced seats, varying posture and perturbation type, will refine seat modelling techniques and improve our understanding of postural stabilization in seated vehicle users.
Author Contributions
Conceptualization, R.H.; Data curation, N.K., M.C. and T.I.; Formal analysis, M.M., R.D. and R.H.; Funding acquisition, R.H.; Investigation, M.M., N.K., T.I., B.S. and R.H.; Methodology, M.M. and R.H.; Software, M.M., R.D. and M.C.; Supervision, R.H.; Writing—original draft, M.M., N.K., B.S. and R.H.; Writing—review & editing, M.M. and R.H. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Toyota Motor Corporation.
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
See [31] for experimental data and www.madymo.com (18 May 2022) for the active human model.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Irmak, T.; Pool, D.M.; Happee, R. Objective and subjective responses to motion sickness: The group and the individual. Exp. Brain Res. 2021, 239, 515–531. [Google Scholar] [CrossRef] [PubMed]
- Zheng, Y.; Shyrokau, B.; Keviczky, T. 3DOP: Comfort-oriented Motion Planning for Automated Vehicles with Active Suspensions. In Proceedings of the IEEE Intelligent Vehicles Symposium (IV), Aachen, Germany, 5–9 June 2022. [Google Scholar]
- Zheng, Y.; Shyrokau, B.; Keviczky, T.; Al Sakka, M.; Dhaens, M. Curve Tilting with Nonlinear Model Predictive Control for Enhancing Motion Comfort. IEEE Trans. Control Syst. Technol. 2021, 30, 1538–1549. [Google Scholar] [CrossRef]
- Papaioannou, G.; Ning, D.; Jerrelind, J.; Drugge, L. A K-Seat-Based PID Controller for Active Seat Suspension to Enhance Motion Comfort. SAE Int. J. Connect. Autom. Veh. 2022, 5, 189–199. [Google Scholar] [CrossRef]
- Papaioannou, G.; Jerrelind, J.; Drugge, L.; Shyrokau, B. Assessment of optimal passive suspensions regarding motion sickness mitigation in different road profiles and sitting conditions. In Proceedings of the 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), Indianapolis, IN, USA, 19–22 September 2021; pp. 3896–3902. [Google Scholar]
- Riccio, G.E.; Stoffregen, T.A. An ecological Theory of Motion Sickness and Postural Instability. Ecol. Psychol. 1991, 3, 195–240. [Google Scholar] [CrossRef]
- Kim, E.; Fard, M.; Kato, K. A seated human model for predicting the coupled human-seat transmissibility exposed to fore-aft whole-body vibration. Appl. Ergon. 2020, 84, 102929. [Google Scholar] [CrossRef] [PubMed]
- Nawayseh, N.; Griffin, M.J. A model of the vertical apparent mass and the fore-and-aft cross-axis apparent mass of the human body during vertical whole-body vibration. J. Sound Vibrat. 2009, 319, 719–730. [Google Scholar] [CrossRef]
- Cho, Y.; Yoon, Y.-S. Biomechanical model of human on seat with backrest for evaluating ride quality. Int. J. Ind. Ergon. 2001, 27, 331–345. [Google Scholar] [CrossRef]
- Teng, T.; Chang, F.; Peng, C. Analysis of human body response to vibration using multi-body dynamics method. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2006, 220, 191–202. [Google Scholar] [CrossRef]
- Desai, R.; Guha, A.; Seshu, P. Multibody biomechanical modelling of human body response to direct and cross axis vibration. Procedia Comput. Sci. 2018, 133, 494–501. [Google Scholar] [CrossRef]
- Mohajer, N.; Abdi, H.; Nahavandi, S.; Nelson, K. Directional and sectional ride comfort estimation using an integrated human biomechanical-seat foam model. J. Sound Vibrat. 2017, 403, 38–58. [Google Scholar] [CrossRef]
- Siefert, A.; Pankoke, S.; Wölfel, H.-P. Virtual optimisation of car passenger seats: Simulation of static and dynamic effects on drivers’ seating comfort. Int. J. Ind. Ergon. 2008, 38, 410–424. [Google Scholar] [CrossRef]
- Tang, C.Y.; Chan, W.; Tsui, C.P. Finite element analysis of contact pressures between seat cushion and human buttock-thigh tissue. COMPEL Int. J. Comput. Math. Electr. Electron. Eng. 2010, 2, 720. [Google Scholar] [CrossRef]
- Verver, M.; van Hoof, J.; Oomens, C.; Van De Wouw, N.; Wismans, J.S. Estimation of spinal loading in vertical vibrations by numerical simulation. Clin. Biomech. 2003, 18, 800–811. [Google Scholar] [CrossRef]
- Wu, J.; Qiu, Y. Modelling of seated human body exposed to combined vertical, lateral and roll vibrations. J. Sound Vibrat. 2020, 485, 115509. [Google Scholar] [CrossRef]
- Notomi, M.; Rasmussen, J. Musculoskeletal computational analysis of the influence of car-seat design/adjustment on fatigue-induced driving. In Proceedings of the 2011 Fourth International Conference on Modeling, Simulation and Applied Optimization, Kuala Lumpur, Malaysia, 19–21 April 2011; pp. 1–6. [Google Scholar]
- Wang, X.; Savonnet, L.; Theodorakos, I.; Beurier, G.; Duprey, S. Biomechanical human models for seating discomfort assessment. In DHM and Posturography; Elsevier: Amsterdam, The Netherlands, 2019; pp. 643–656. [Google Scholar]
- Bertolini, G.; Straumann, D. Moving in a moving world: A review on vestibular motion sickness. Front. Neurol. 2016, 7, 14. [Google Scholar] [CrossRef] [Green Version]
- Happee, R.; de Bruijn, E.; Forbes, P.A.; van Drunen, P.; van Dieën, J.H.; van der Helm, F.C.T. Neck postural stabilization, motion comfort, and impact simulation. In DHM and Posturography; Elsevier: Amsterdam, The Netherlands, 2019; pp. 243–260. [Google Scholar]
- Happee, R.; de Bruijn, E.; Forbes, P.A.; van der Helm, F.C. Dynamic head-neck stabilization and modulation with perturbation bandwidth investigated using a multisegment neuromuscular model. J. Biomech. 2017, 58, 203–211. [Google Scholar] [CrossRef]
- Happee, R.; Hoofman, M.; Van den Kroonenberg, A.; Morsink, P.; Wismans, J. A mathematical human body model for frontal and rearward seated automotive impact loading. In Proceedings of the 42nd Stapp Car Crash Conference, Tempe, AZ, USA, 2–4 November 1998; SAE International: Warrendale, PA, USA, 1998; pp. 2720–2734. [Google Scholar]
- Happee, R.; Ridella, S.; Nayef, A.; Morsink, P.; de Lange, R.; Bours, R.; van Hoof, J. Mathematical human body models representing a mid size male and a small female for frontal, lateral and rearward impact loading. In Proceedings of the International Conference on the Biomechanics of Impact, Montpellier, France, 20–22 September 2000. [Google Scholar]
- Happee, R.; Morsink, P.; Wismans, J. Mathematical human body modelling for impact loading. In Proceedings of the SAE International Digital Human Modeling for Design and Engineering Conference and Exposition, The Hague, The Netherlands, 18–20 May 1999. SAE Technical Papers. [Google Scholar] [CrossRef]
- Rattanagraikanakorn, B.; Schuurman, M.J.; Gransden, D.I.; Happee, R.; De Wagter, C.; Sharpanskykh, A.; Blom, H.A. Modelling Head Injury due to Unmanned Aircraft Systems Collision: Crash Dummy vs Human Body. In Proceedings of the AIAA Aviation 2019 Forum, Dallas, TX, USA, 17–21 June 2019; p. 2835. [Google Scholar]
- Broos, J.; Meijer, R. Simulation method for whiplash injury prediction using an active human model. In Proceedings of the 2016 IRCOBI Conference Proceedings—International Research Council on the Biomechanics of Injury, Malaga, Spain, 14–16 September 2016; pp. 390–408. [Google Scholar]
- Meijer, R.; Broos, J.; Elrofai, H.; De Bruijn, E.; Forbes, P.; Happee, R. Modelling of bracing in a multi-body active human model. In Proceedings of the 2013 IRCOBI Conference Proceedings—International Research Council on the Biomechanics of Injury, Gothenburg, Sweden, 11–13 September 2013; pp. 576–587. [Google Scholar]
- Meijer, R.; Rodarius, C.; Adamec, J.; van Nunen, E.; van Rooij, L. A first step in computer modelling of the active human response in a far-side impact. Int. J. Crashworthiness 2008, 13, 643–652. [Google Scholar] [CrossRef]
- Meijer, R.; Van Hassel, E.; Broos, J.; Elrofai, H.; Van Rooij, L.; Van Hooijdonk, P. Development of a multi-body human model that predicts active and passive human behaviour. In Proceedings of the 2012 IRCOBI Conference Proceedings—International Research Council on the Biomechanics of Injury, Dublin, Ireland, 12–14 September 2012; pp. 622–636. [Google Scholar]
- Mirakhorlo, M.; Irmak, T.; Happee, R. Simulating lateral postural stabilisation in dynamic cornering. In Proceedings of the 8. VDI-Fachtagung Humanschwingungen Vibrations- und Schwingungseinwirkungen auf den Menschen, Würzburg, Germany, 1–2 October 2020. [Google Scholar]
- Mirakhorlo, M.; Kluft, N.; Shyrokau, B.; Happee, R. Effects of seat back height and posture on 3D motion transmission to pelvis, trunk and head. Int. J. Ind. Ergon. 2022. [Google Scholar]
- Forbes, P.A.; de Bruijn, E.; Schouten, A.C.; van der Helm, F.C.; Happee, R. Dependency of human neck reflex responses on the bandwidth of pseudorandom anterior-posterior torso perturbations. Exp. Brain Res. 2013, 226, 1–14. [Google Scholar] [CrossRef]
- van Drunen, P.; van der Helm, F.C.; van Dieen, J.H.; Happee, R. Trunk stabilization during sagittal pelvic tilt: From trunk-on-pelvis to trunk-in-space due to vestibular and visual feedback. J. Neurophysiol. 2016, 115, 1381–1388. [Google Scholar] [CrossRef] [Green Version]
- van Drunen, P.; Koumans, Y.; van der Helm, F.C.; van Dieen, J.H.; Happee, R. Modulation of intrinsic and reflexive contributions to low-back stabilization due to vision, task instruction, and perturbation bandwidth. Exp. Brain Res. 2015, 233, 735–749. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Salter, S.; Diels, C.; Herriotts, P.; Kanarachos, S.; Thake, D. Model to predict motion sickness within autonomous vehicles. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2020, 234, 1330–1345. [Google Scholar] [CrossRef]
- Land, M.F.; Lee, D.N. Where we look when we steer. Nature 1994, 369, 742–744. [Google Scholar] [CrossRef] [PubMed]
Figure 1.
Human model in the vibration test on an experimental seat with a configurable backrest and two foam blocks modelled using finite elements (left) and on the rear bench of a Prius vehicle in the slalom test (middle) and falling without leg control in the slalom (right).
Figure 1.
Human model in the vibration test on an experimental seat with a configurable backrest and two foam blocks modelled using finite elements (left) and on the rear bench of a Prius vehicle in the slalom test (middle) and falling without leg control in the slalom (right).

Figure 2.
Slalom validation for body rotation. Model prediction of head (upper), trunk (middle) and pelvis (lower) orientations. Blue line: experimental; dotted green line: best model fit with high postural gains and with hips and knees pushing the body into the seat back; solid green line: high gains but no pushing; red line: lower postural gains fitted towards the vibration experiment.
Figure 2.
Slalom validation for body rotation. Model prediction of head (upper), trunk (middle) and pelvis (lower) orientations. Blue line: experimental; dotted green line: best model fit with high postural gains and with hips and knees pushing the body into the seat back; solid green line: high gains but no pushing; red line: lower postural gains fitted towards the vibration experiment.

Figure 3.
Slalom validation for body acceleration. Blue line: experimental; dotted green line: best model fit with high postural gains and with hips and knees pushing the body into the seat back; solid green line: high gains but no pushing; red line: lower postural gains fitted towards the vibration experiment.
Figure 3.
Slalom validation for body acceleration. Blue line: experimental; dotted green line: best model fit with high postural gains and with hips and knees pushing the body into the seat back; solid green line: high gains but no pushing; red line: lower postural gains fitted towards the vibration experiment.

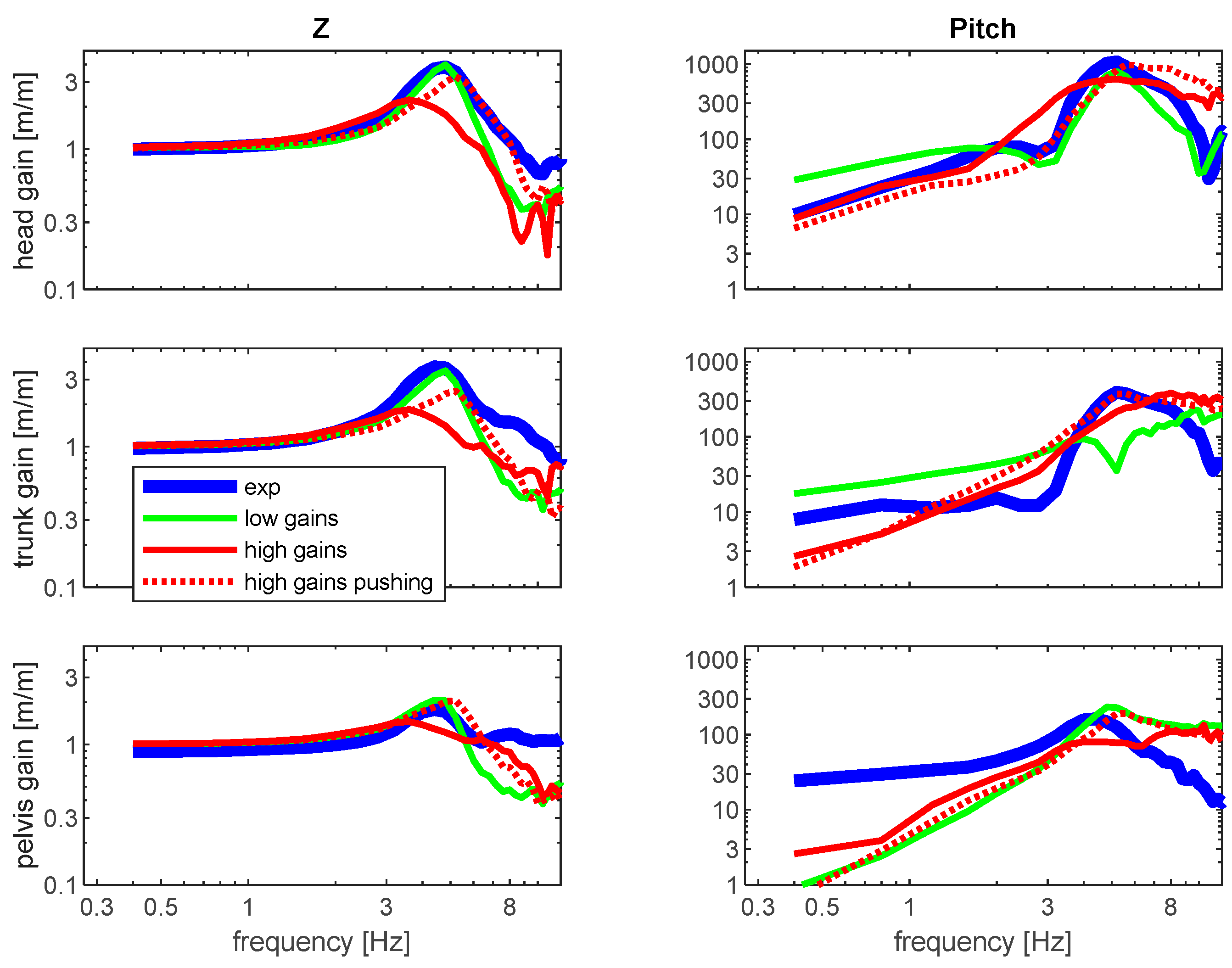
Figure 4.
Fore–aft vibration validation. Model prediction of head (upper), trunk (middle) and pelvis (lower) in translation (left) and pitch rotation (right). Blue line: experimental; solid green line: best model with low postural gains; red solid line: high gains fitted towards the slalom but no pushing; red dotted line: high gains and with hips and knees pushing the body into the seat back.
Figure 4.
Fore–aft vibration validation. Model prediction of head (upper), trunk (middle) and pelvis (lower) in translation (left) and pitch rotation (right). Blue line: experimental; solid green line: best model with low postural gains; red solid line: high gains fitted towards the slalom but no pushing; red dotted line: high gains and with hips and knees pushing the body into the seat back.

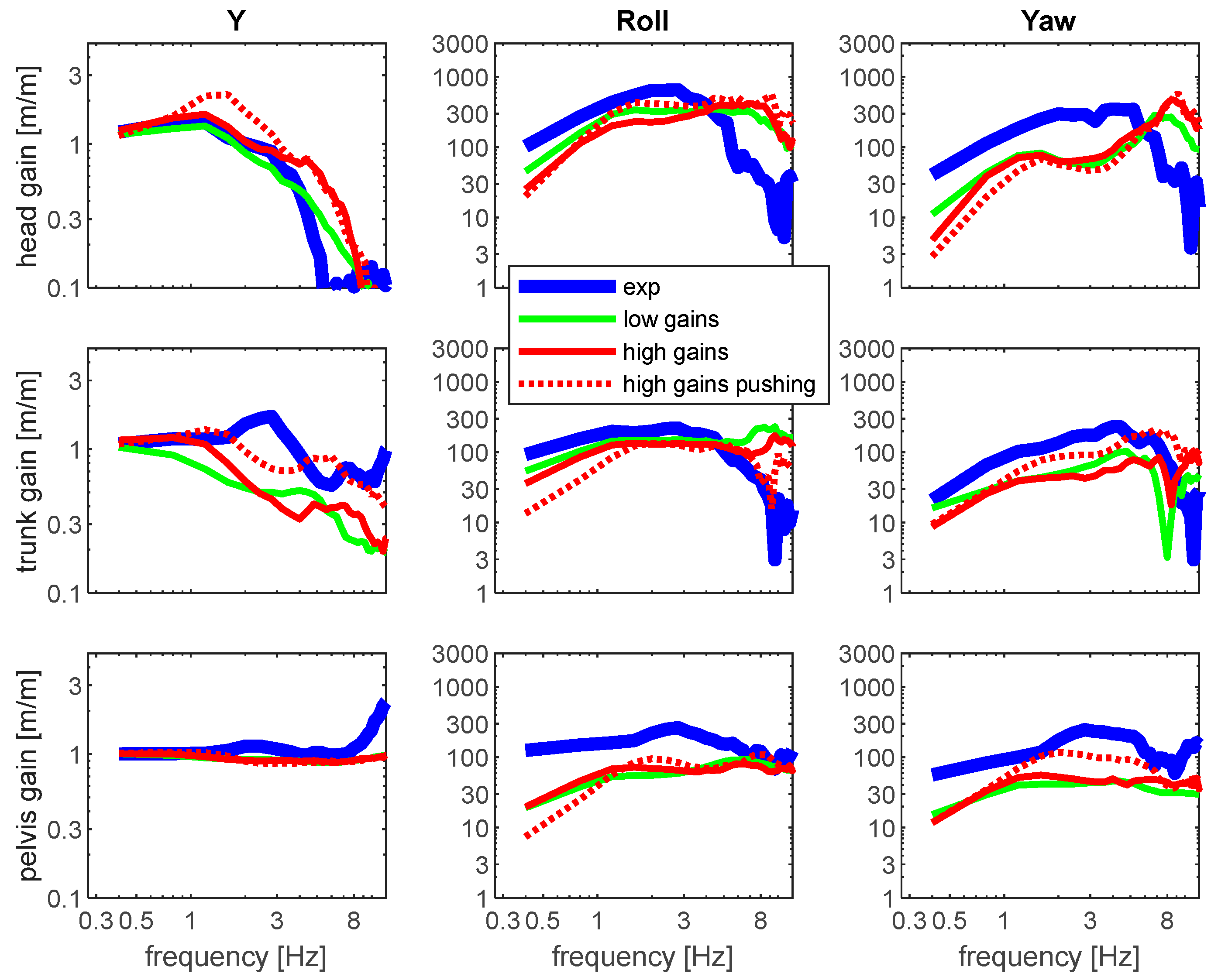
Figure 5.
Lateral vibration validation. Model prediction of head (upper), trunk (middle) and pelvis (lower) in translation (left) and roll and yaw rotation (middle and right). Blue line: experimental; solid green line: best model with low postural gains; red solid line: high gains fitted towards the slalom but no pushing; red dotted line: high gains and with hips and knees pushing the body into the seat back.
Figure 5.
Lateral vibration validation. Model prediction of head (upper), trunk (middle) and pelvis (lower) in translation (left) and roll and yaw rotation (middle and right). Blue line: experimental; solid green line: best model with low postural gains; red solid line: high gains fitted towards the slalom but no pushing; red dotted line: high gains and with hips and knees pushing the body into the seat back.

Figure 6.
Vertical vibration validation. Model prediction of head (upper), trunk (middle) and pelvis (lower) in vertical translation (left) and pitch rotation (right). Blue line: experimental; solid green line: best model with low postural gains; red solid line: high gains fitted towards the slalom but no pushing; red dotted line: high gains and with hips and knees pushing the body into the seat back.
Figure 6.
Vertical vibration validation. Model prediction of head (upper), trunk (middle) and pelvis (lower) in vertical translation (left) and pitch rotation (right). Blue line: experimental; solid green line: best model with low postural gains; red solid line: high gains fitted towards the slalom but no pushing; red dotted line: high gains and with hips and knees pushing the body into the seat back.

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Mirakhorlo, M.; Kluft, N.; Desai, R.; Cvetković, M.; Irmak, T.; Shyrokau, B.; Happee, R. Simulating 3D Human Postural Stabilization in Vibration and Dynamic Driving. Appl. Sci. 2022, 12, 6657. https://doi.org/10.3390/app12136657
AMA Style
Mirakhorlo M, Kluft N, Desai R, Cvetković M, Irmak T, Shyrokau B, Happee R. Simulating 3D Human Postural Stabilization in Vibration and Dynamic Driving. Applied Sciences. 2022; 12(13):6657. https://doi.org/10.3390/app12136657
Chicago/Turabian StyleMirakhorlo, Mojtaba, Nick Kluft, Raj Desai, Marko Cvetković, Tugrul Irmak, Barys Shyrokau, and Riender Happee. 2022. "Simulating 3D Human Postural Stabilization in Vibration and Dynamic Driving" Applied Sciences 12, no. 13: 6657. https://doi.org/10.3390/app12136657
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.