
Development and Testing of Automatic Row Alignment System for Corn Harvesters

Abstract
:1. Introduction
2. Materials and Methods
2.1. The Overall Design Solution of the Automatic Alignment System
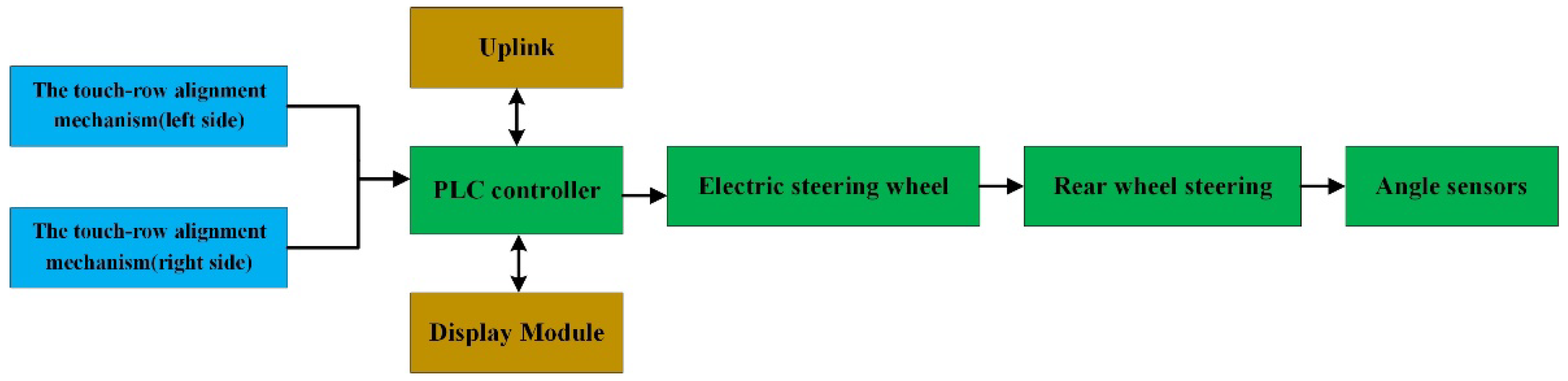
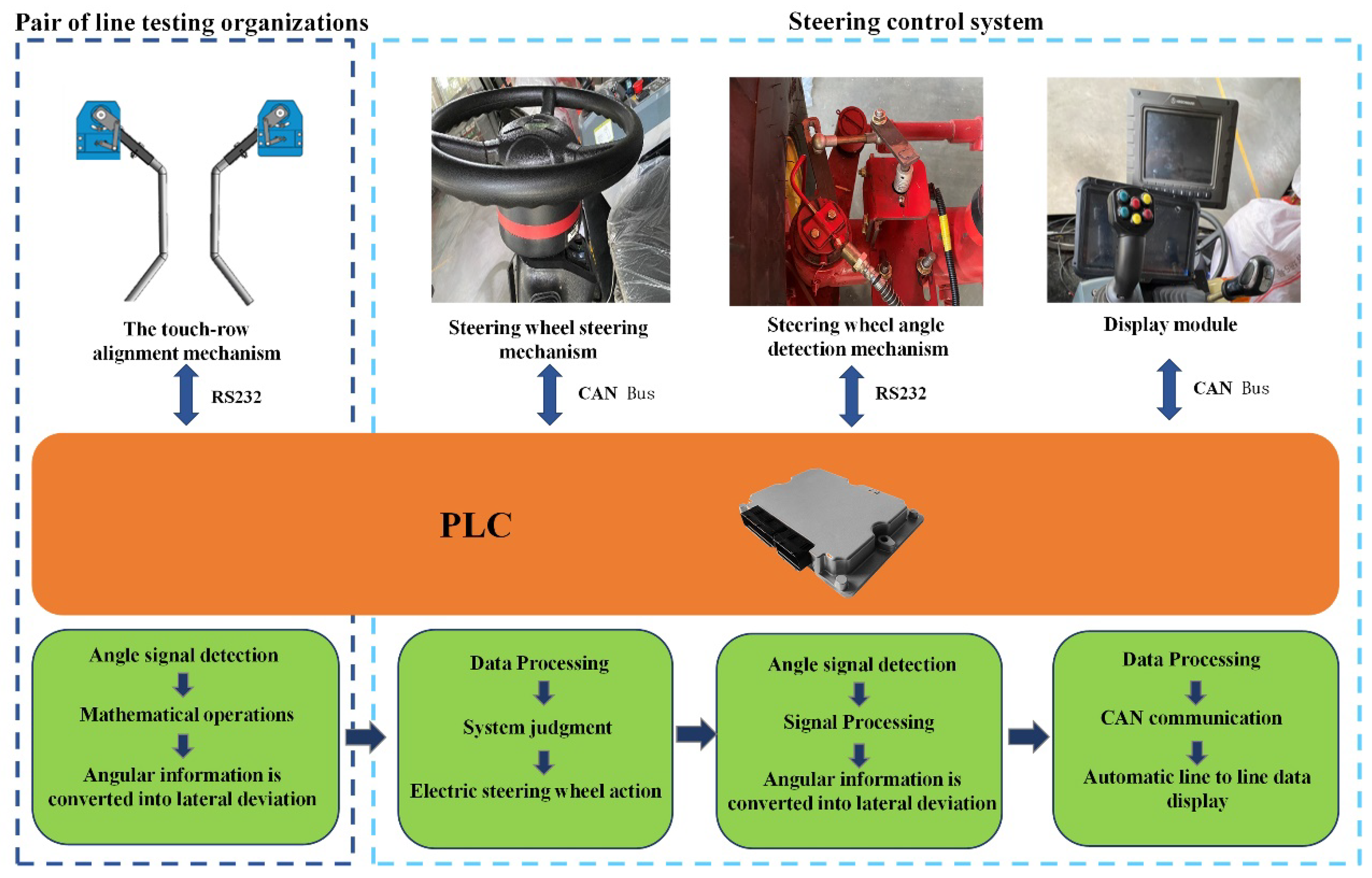
2.1.1. System Composition
2.1.2. Working Principle
2.2. Key Component Design
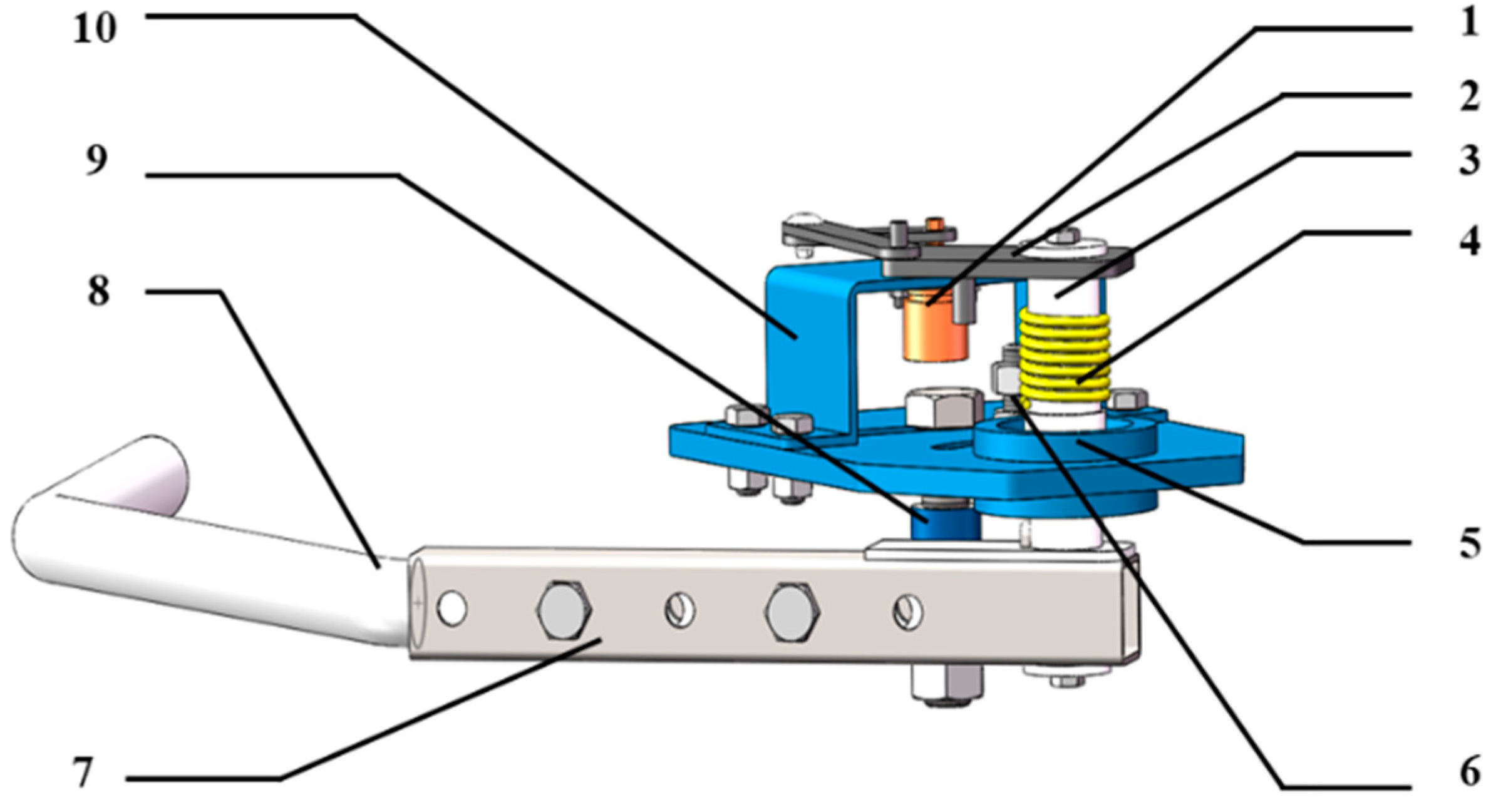
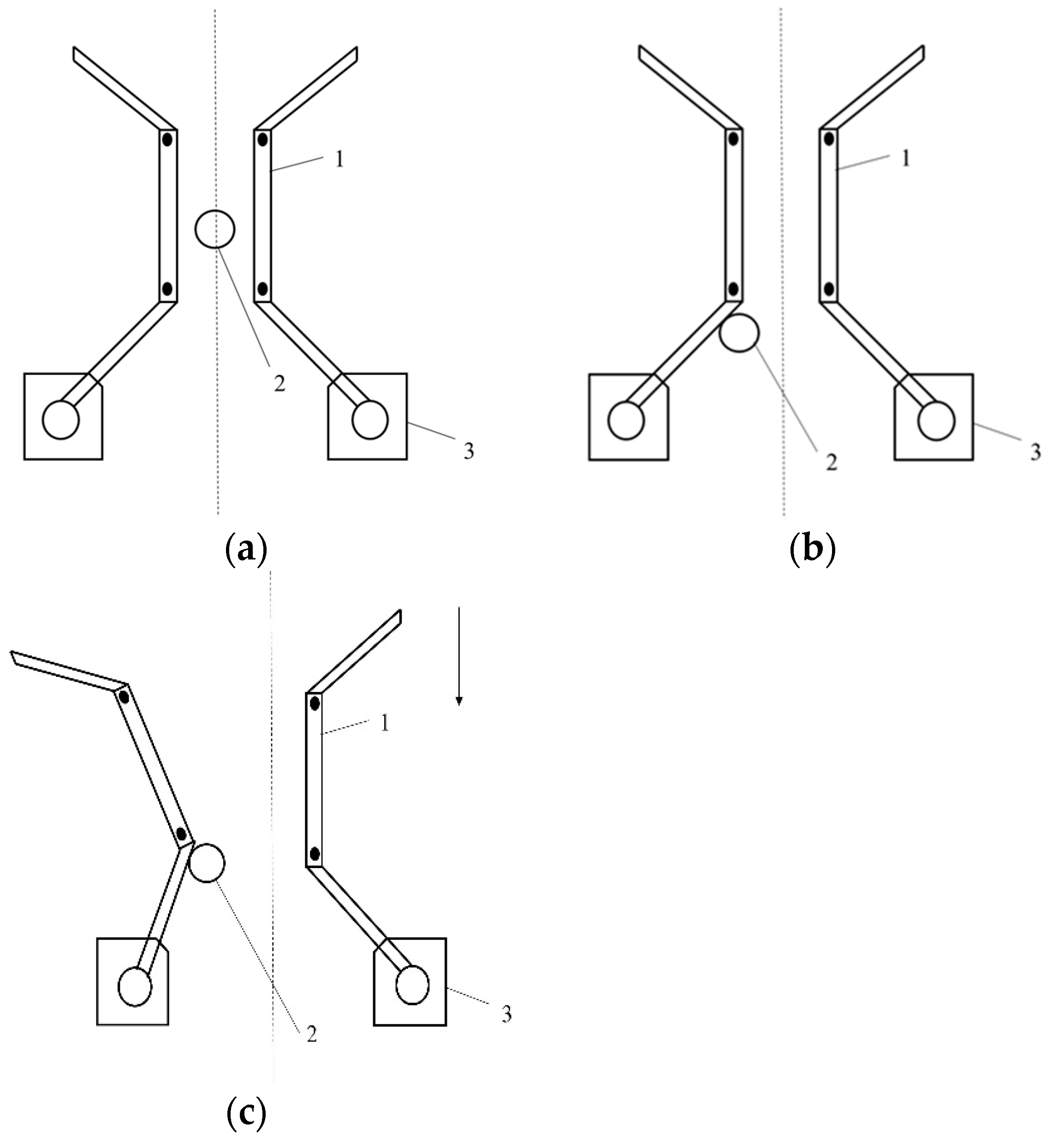
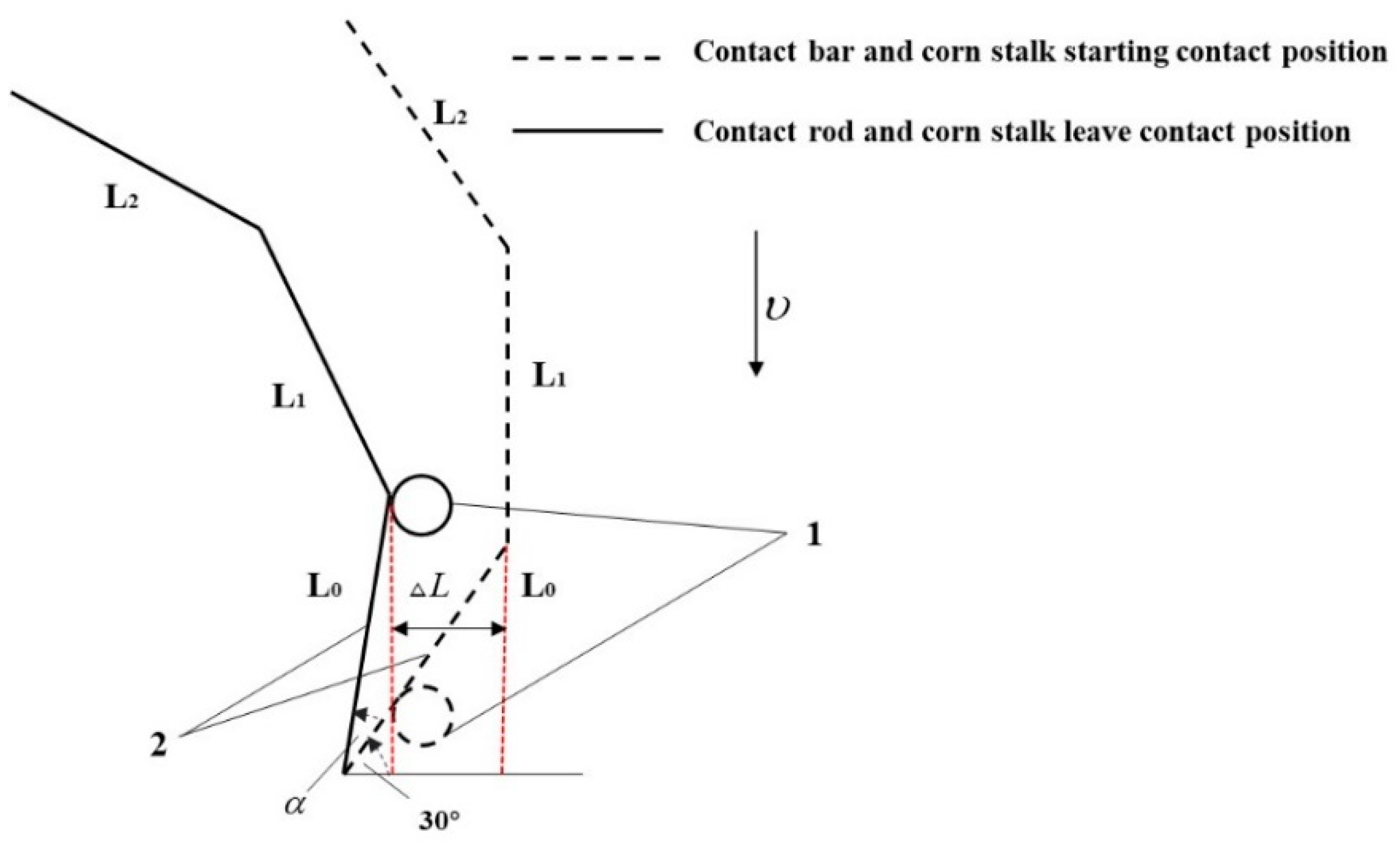
2.2.1. Touch to Line Mechanism Design
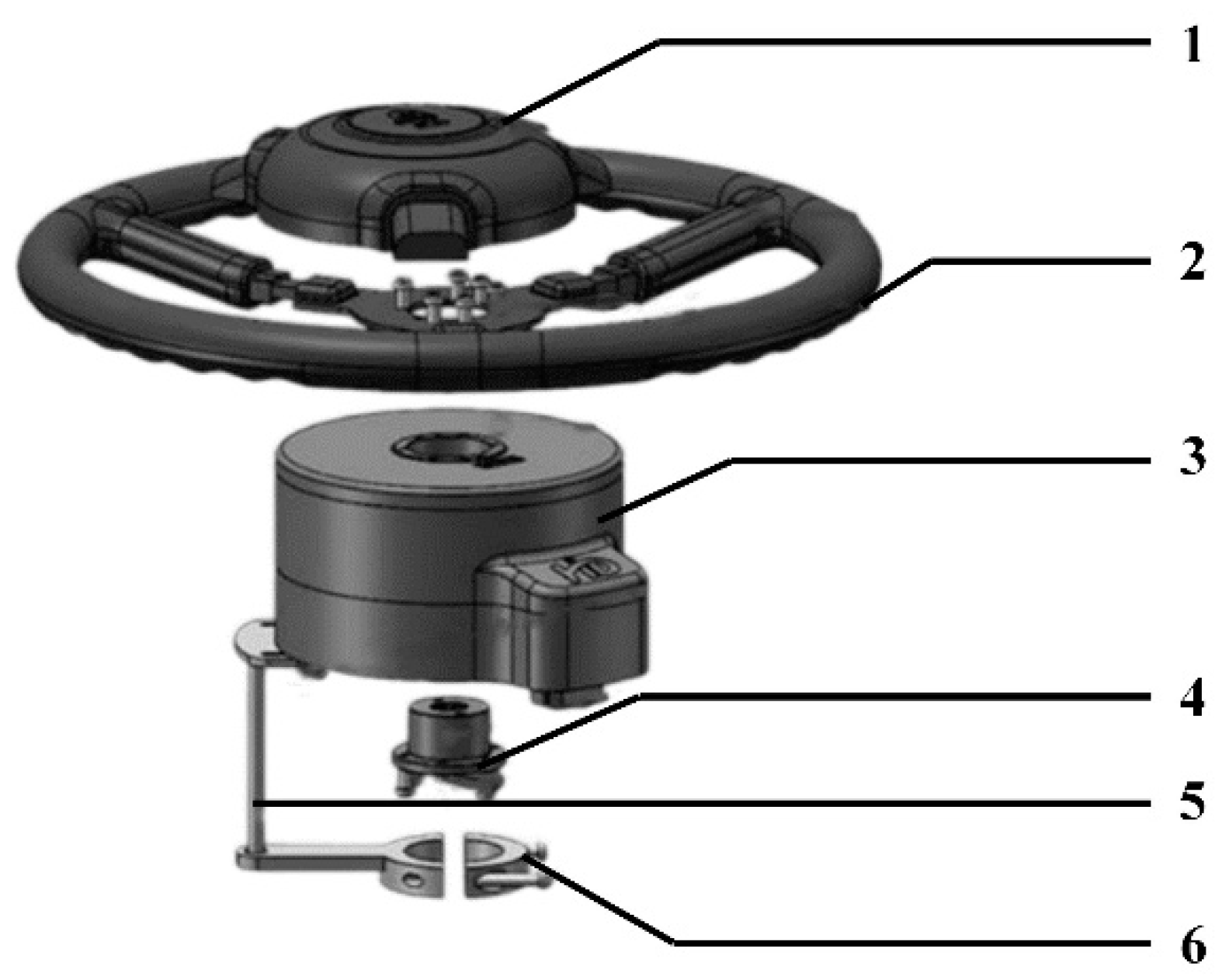
2.2.2. Electric Steering Wheel Steering Mechanism
2.3. Control System Design
2.3.1. Automatic Line Pairing System Program Design
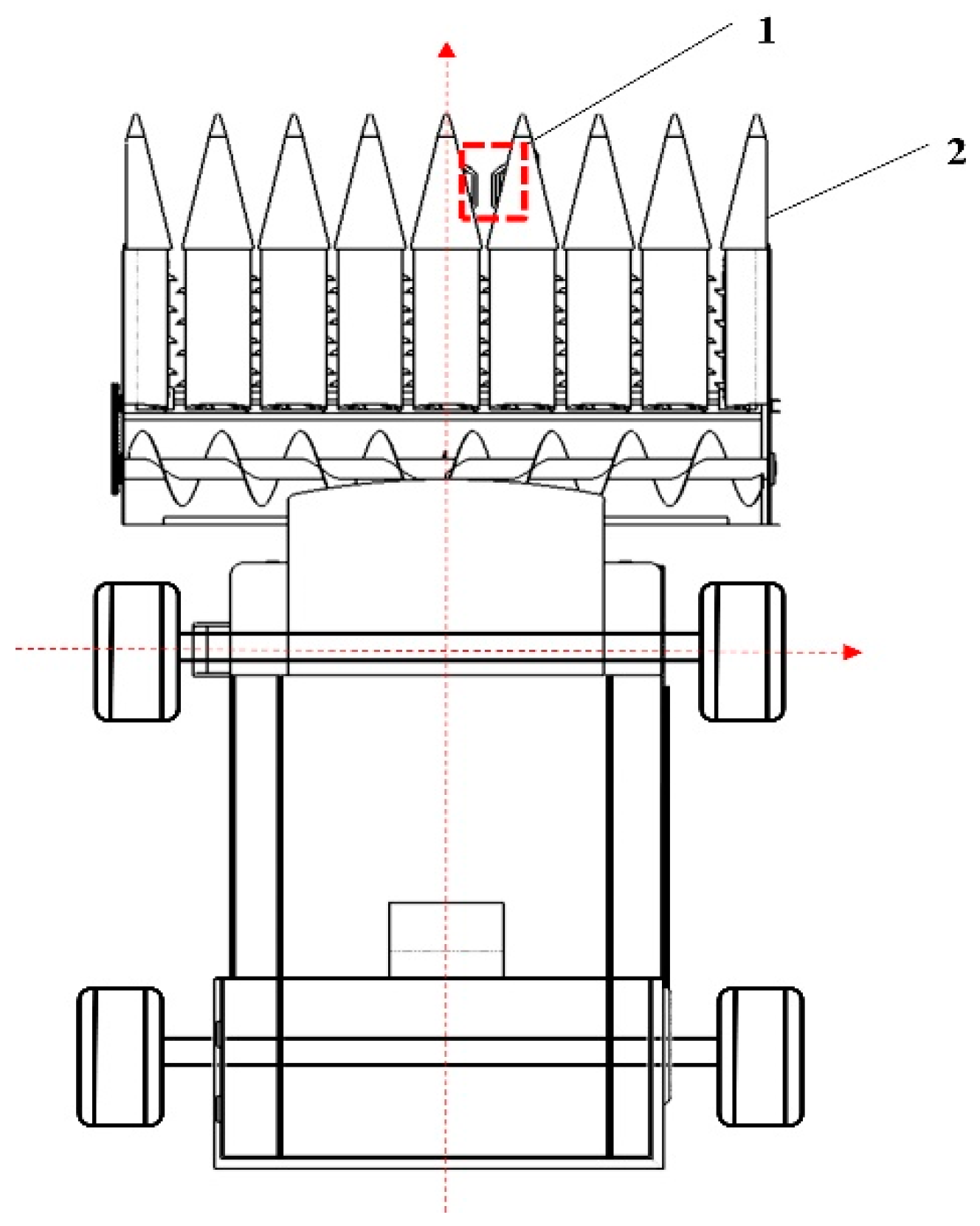
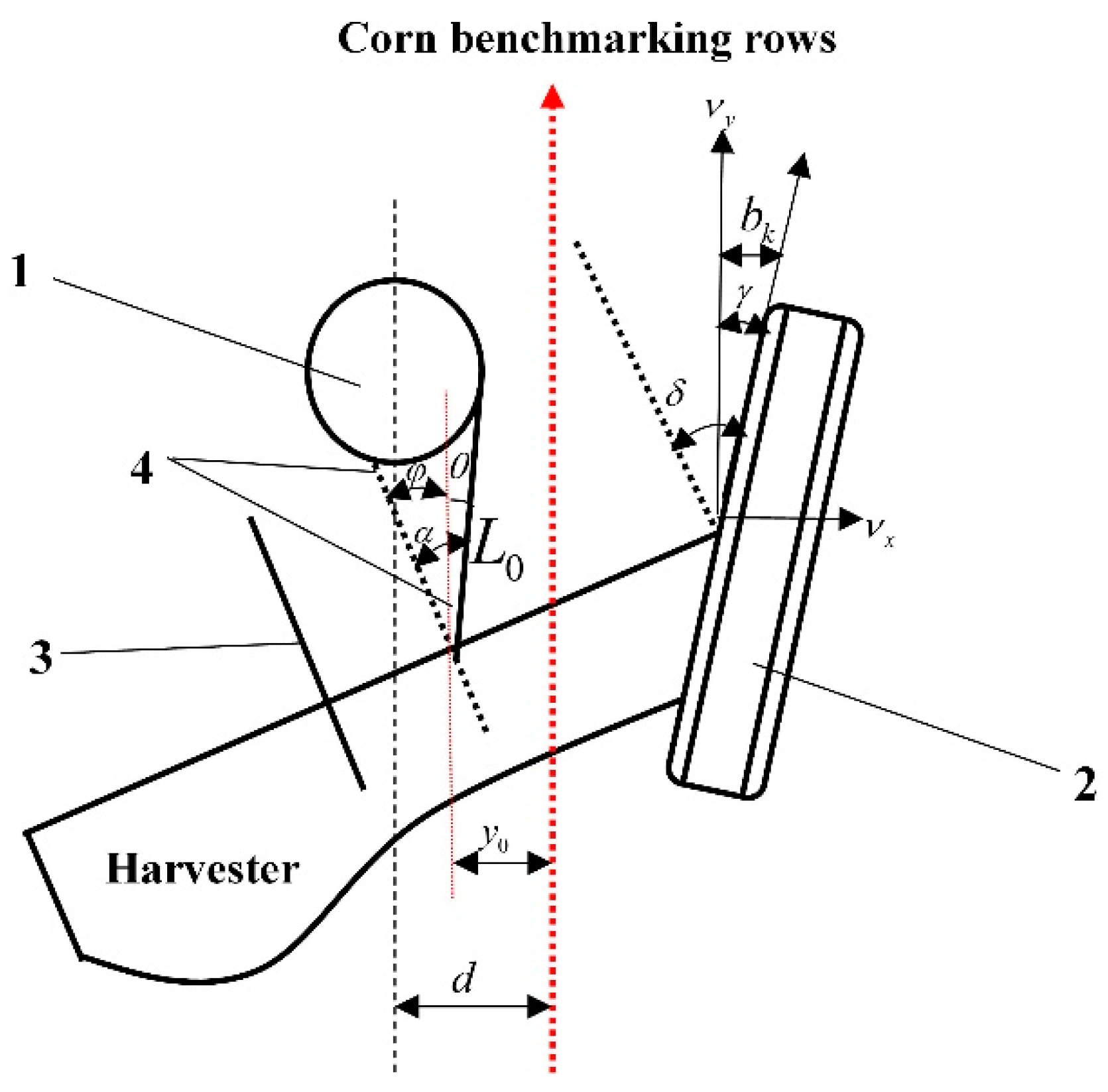
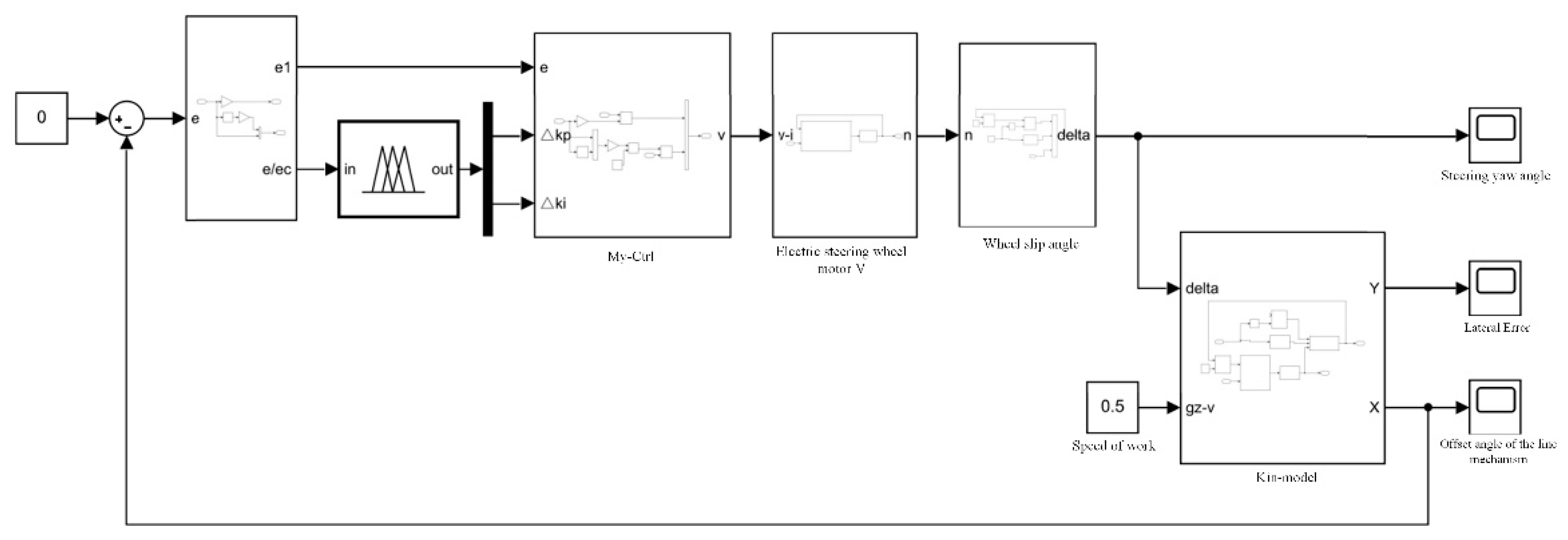
2.3.2. Kinematic Model of Body Steering Control System
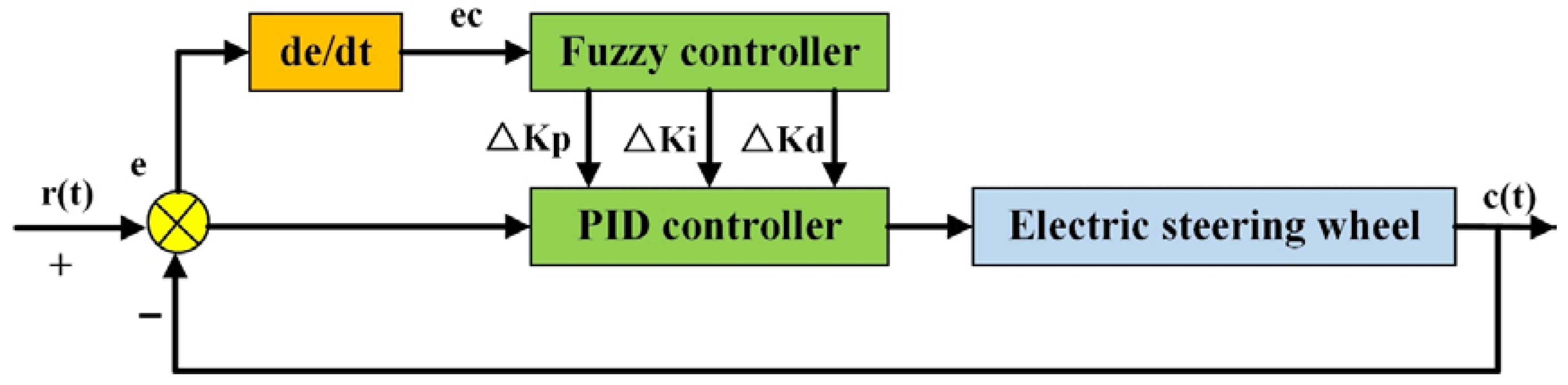
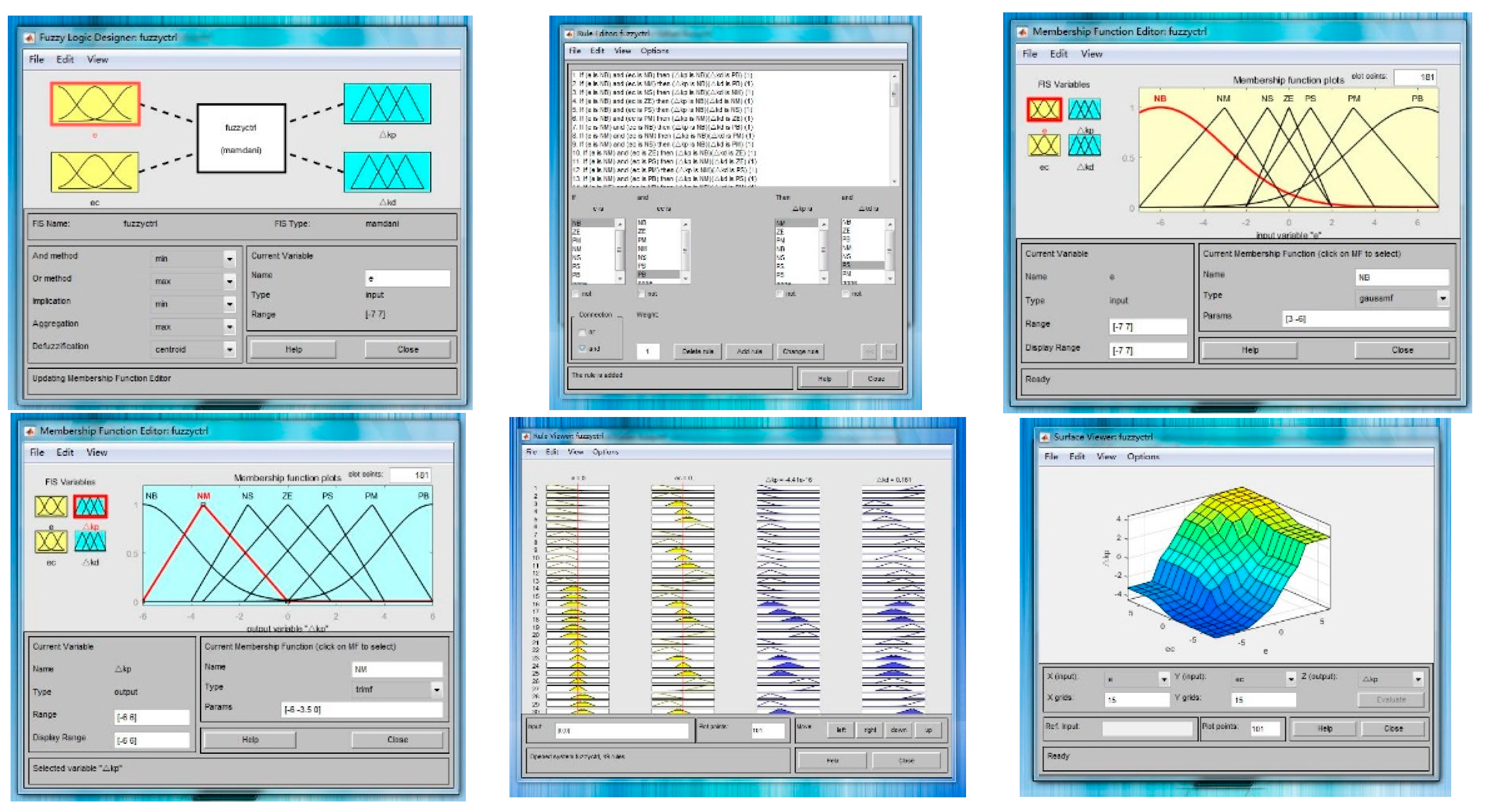
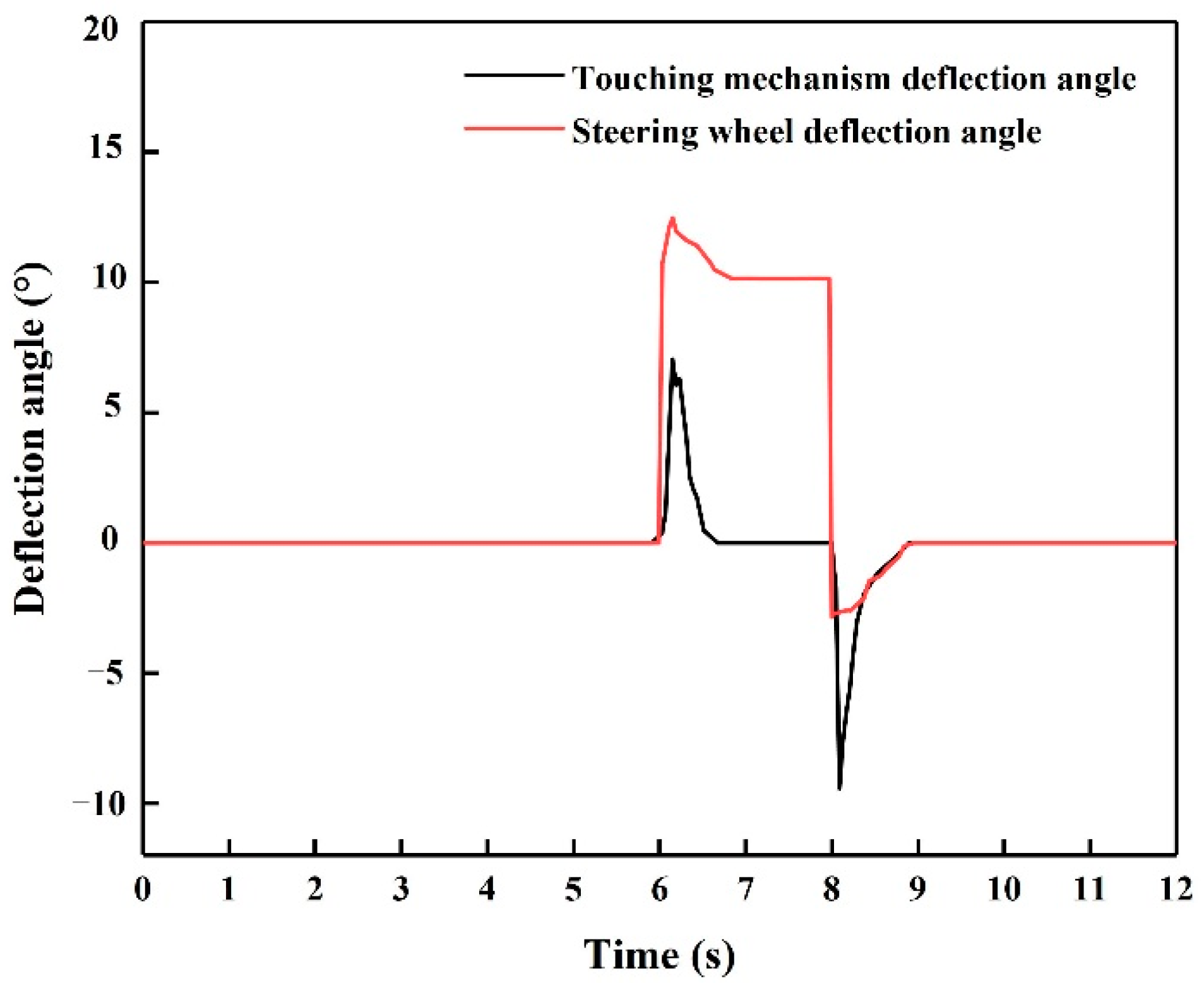
2.3.3. Fuzzy PID Control Algorithm and Matlab/Simulink Simulation
2.4. Test Method
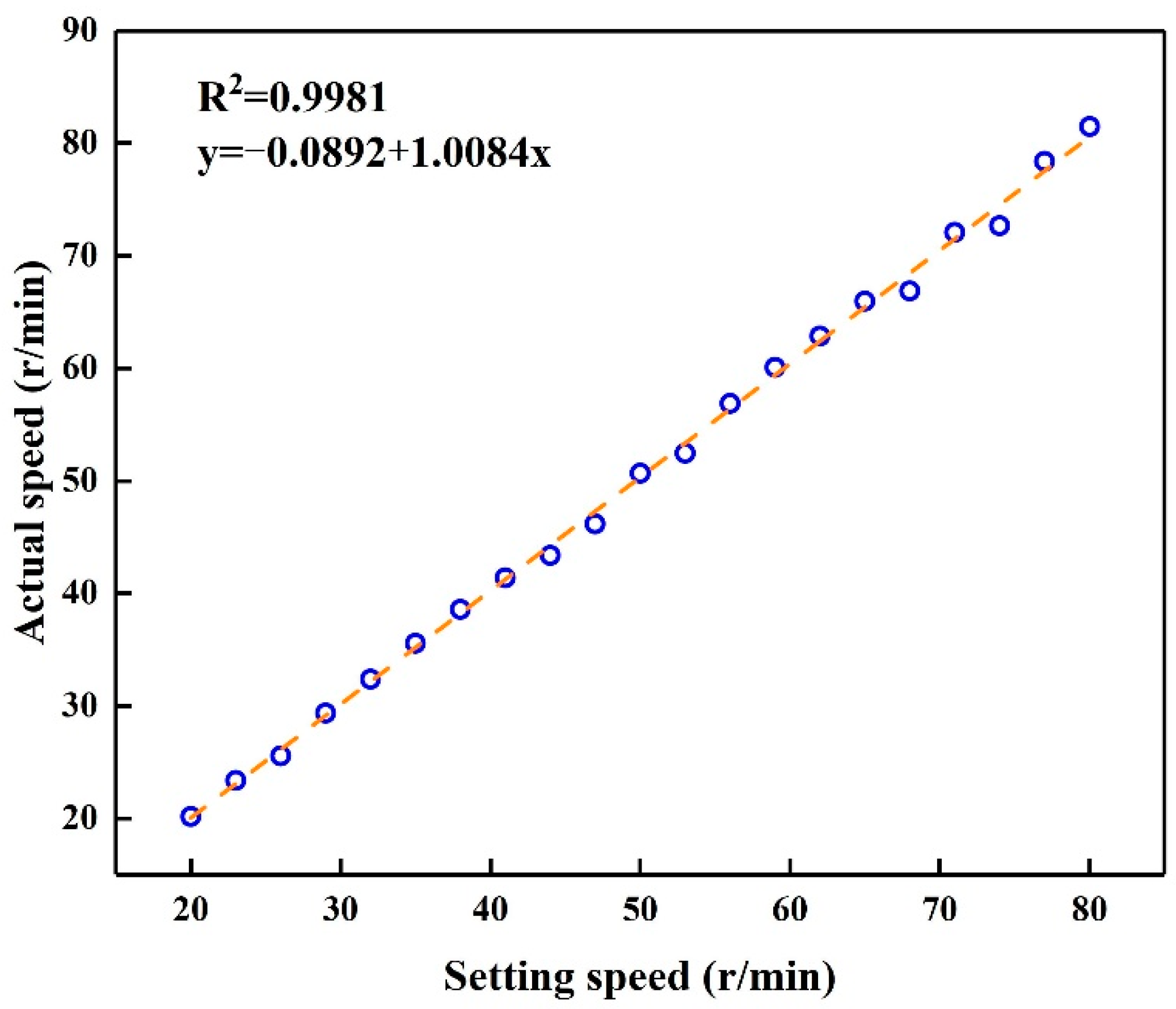
2.4.1. Electric Steering Wheel Motor Speed Test
2.4.2. Field Trial of Automatic Row Alignment System
3. Results and Discussion
3.1. Electric Steering Wheel Motor Test Analysis
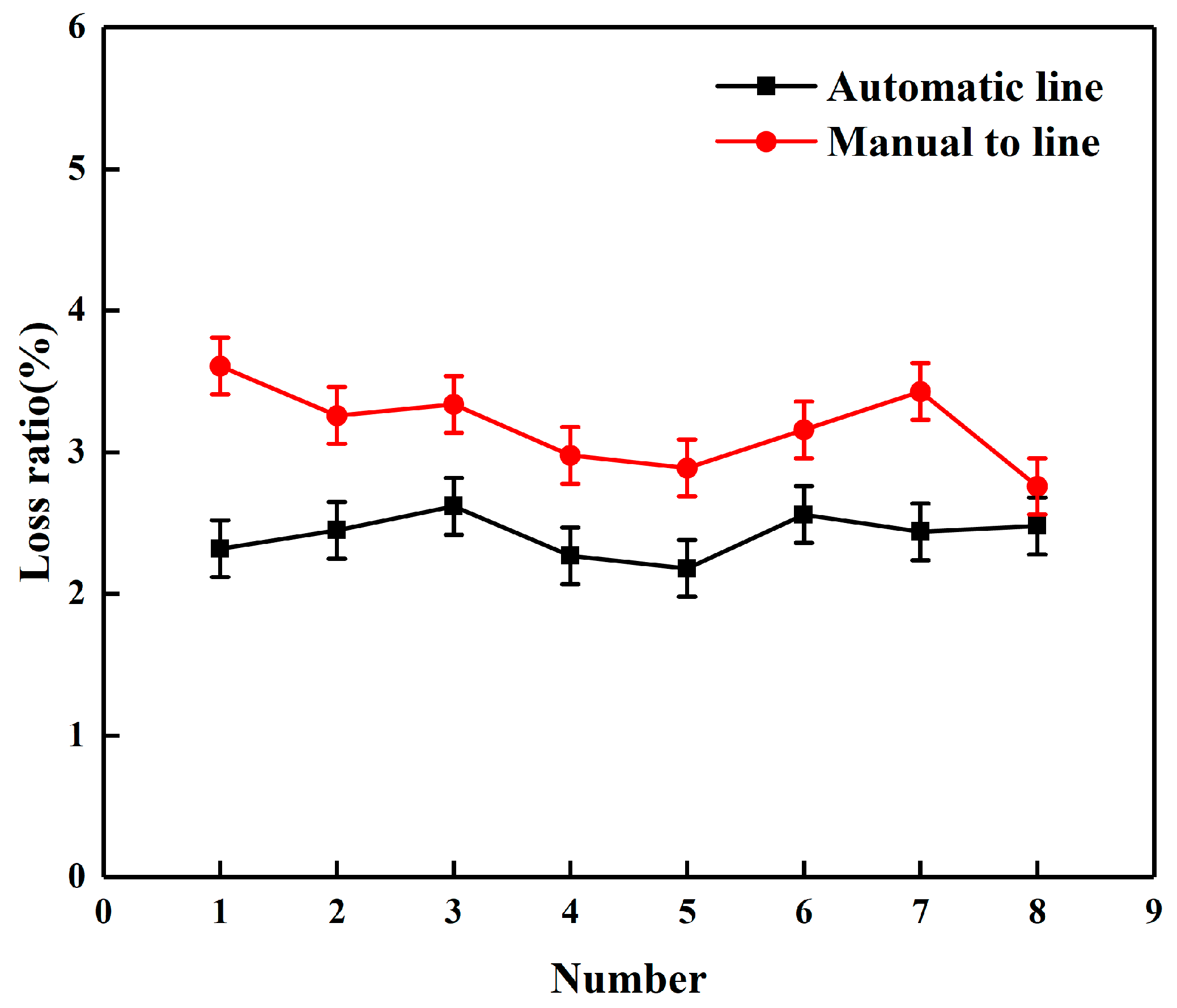
3.2. Analysis of Automatic Row-To-Row Field Trials
3.3. Automatic Alignment System Effect Discussion
4. Conclusions
- In view of the current situation that the existing corn harvesters in China are primarily steered by manual operation to achieve automatic alignment, a corn harvester automatic alignment system based on touch alignment mechanism and electric steering wheel is designed, and the CAN bus is used to realize system control, resulting in a novel concept for the development of corn harvester automatic alignment.
- The kinematic models of touch-to-row mechanism and body steering control system are built, and the automatic alignment control system of corn harvester based on adaptive fuzzy PID control is designed and simulated by Simulink in Matlab.
- The 4LZ-8 self-propelled corn harvester serves as a carrier to achieve automatic row alignment during corn harvester harvesting, and the system is commissioned in the factory and tested in the field, respectively. The test results indicate that the electric steering wheel motor speed adjustment error is within 2%, and the deviation of corn stalk from the center of the cutting lane of the opposite row during the operation of the automatic row alignment system is 0.063 m at the mean value of deviation, which can meet the requirements of automatic row alignment harvesting of corn harvesters and is improved compared with previous reports. The adoption of automatic row alignment system for harvesting reduces the loss rate of corn kernels by 0.76% compared with manual row alignment, which is beneficial for reducing the loss of kernels in corn harvest and enhancing the harvest quality. Moreover, the deviation of automatic row alignment will progressively increase with the increase of harvester speed during the automatic row alignment harvesting process. To eliminate remove the speed limitation, we will continue to investigate innovative control strategies to lessen the deviation of the automatic row alignment system of corn harvester under high-speed operation.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, M.; Geng, A.; Zhang, Z.; Zhang, J. Research status and development trend of intelligent monitoring system for grain harvester. J. China Agric. Chem. News 2018, 39, 85–90. [Google Scholar]
- Zhang, Z.; Chi, R.; Du, Y.; Pan, X.; Dong, N.; Xie, B. Experiments and modeling of mechanism analysis of maize picking loss. Int. J. Agric. Biol. Eng. 2021, 14, 9. [Google Scholar] [CrossRef]
- Zhang, Z.; Geng, A. Development and evaluation of low-damage maize snapping mechanism based on deformation energy conversion. J. Appl. Sci. 2021, 11, 12158. [Google Scholar] [CrossRef]
- Monhollen, N.S.; Shinners, K.J.; Friede, J.C.; Rocha, E.; Luck, B.L. In-field machine vision system for identifying corn kernel losses. J. Comput. Electron. Agric. 2020, 174, 105496. [Google Scholar] [CrossRef]
- Li, J.; Ding, X.; Deng, X. Intra-row Path Extraction and Navigation for Orchards Based on LiDAR. J. Agric. Mech. 2020, 51, 7. [Google Scholar]
- Miao, Z.; Tian, D.; He, C.; Li, N. Research on automatic line-to-line auxiliary driving control technology of intelligent cotton picker. J. Agric. Mech. Res. 2022, 44, 72–76. [Google Scholar]
- Han, K.; Hao, F.; Miao, Z.; Han, Z.; Gan, B.; Li, B.; Yu, B. Design and development of operation status monitoring system for cotton picker based on CAN. J. Farm Mach. 2019, 9, 91–97. [Google Scholar]
- Miao, Z.; Chu, J.; Liu, C.; Han, Z.; Gan, B.; Hao, F. Research on automatic line-to-line auxiliary driving control technology of intelligent cotton picker. J. Agric. Mech. Res. 2012, 43, 180–184. [Google Scholar]
- Ollis, M.; Stentz, A. First results in vision–based crop line tracking. In Proceedings of the IEEE International Conference on Robotics and Automation, Minneapolis, MN, USA, 22–28 April 1996; pp. 951–956. [Google Scholar]
- Keicher, R.; Seufert, H. Automatic guidance for agricultural vehicles in Europe. J. Comput. Electron. Agric. 2000, 25, 169–194. [Google Scholar] [CrossRef]
- Benson, E.R.; Reid, J.F.; Zhang, Q. Machine vision-based guidance system for an agricultural small-grain harvester using cut-edge detection. J. Biosyst. Eng. 2003, 86, 389–398. [Google Scholar] [CrossRef]
- Wang, C. Development of a New Corn Cutting Table with Automatic Row Alignment Based on Image Recognition. Ph.D. Thesis, University of Jinan, Jinan, China, 2017. [Google Scholar]
- Zhang, K.; Hu, Y.; Yang, L.; Zhang, D.; Cui, T.; Fan, L. Design and experiment of auto-follow row system for corn harvester. J. Agric. Mach. 2020, 51, 103–114. [Google Scholar]
- Chen, G.; Li, Q.; Sun, Y.; Sun, Y.; Shen, J.; He, Q. Study on automatic on-line control system of corn harvester. J. China Agric. Chem. News 2016, 37, 191–194 + 280. [Google Scholar]
- Zhang, Z.; Li, W.; Ma, R. Automatic steering control system research on fuzzy PID. J. Agric. Mech. Res. 2016, 38, 162–165 + 176. [Google Scholar]
- Yu, G.R.; Bai, K.Y.; Chen, M.C. Applications of taguchi method to fuzzy control for path tracking of a wheeled mobile robot. In Proceedings of the 2018 IEEE International Conference on Applied System Innovation (ICASI), Chiba, Japan, 13–17 April 2018. [Google Scholar]
- He, J.; Zhu, J.; Luo, X.; Zhang, Z.; Hu, L.; Gao, Y. Design of steering control system for rice transplanter equipped with steering wheel-like motor. J. Agric. Eng. 2019, 35, 10–17. [Google Scholar]
- Gao, F.; Wang, Z.; Bai, X.; Yang, L. Design of automatic row guidance device for self-propelled beet harvester. J. Agric. Mech. Res. 2020, 42, 69–76. [Google Scholar]
- Sharifuddin, M.; Mustaffha, S. Preliminary assessment of grain losses for paddy combine harvester in koperasi felcra seberang perak, Malaysia. IOP Conf. Ser. Earth Environ. Sci. 2021, 757, 012030. [Google Scholar] [CrossRef]
- Hirschmuller, H. Stereo vision in structured environments by consistent semi-global matching. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’06), New York, NY, USA, 17–22 June 2006. [Google Scholar]
- Li, J.; Jie, Z. Analyses of combine harvester grain loss measurement. J. Agric. Mech. Res. 2007, 12, 248–250. [Google Scholar]
- Zhang, X.; Liu, Z. A survey on stereo vision matching algorithms. In Proceedings of the 11th World Congress on Intelligent Control and Automation, Shenyang, China, 29 June–4 July 2014; pp. 2026–2031. [Google Scholar]
- Di, Z.; Cui, Z.; Zhang, H.; Jiang, W.; Zhou, J.; Zheng, Z. Design and experiment of 4YL-4 self- propelled corn grain harvester. J. Agric. Mech. Res. 2020, 42, 116–121. [Google Scholar]
- Dimitrov, V.; Borisova, L. Generalized scheme of fuzzy control of grain harvester in field conditions. IOP Conf. Ser. Earth Environ. Sci. 2021, 723, 032083. [Google Scholar] [CrossRef]
- Munack, A.; Speckmann, H. Communication technology is the backbone of precision agriculture. R. Int. Comm. Agric. Eng. 2001, 3, 1–12. [Google Scholar]
- Singh, M.; Singh, J.; Sharma, A. Development of a batch type yield monitoring system for grain combine harvester. J. Agric. Eng. 2011, 48, 10–16. [Google Scholar]
- Speckmann, H.; Jahns, G. Development and application of an agricultural BUS for data transfer. J. Comput. Electron. Agric. 1999, 23, 219–237. [Google Scholar] [CrossRef]
- Wang, S.; Hu, Z.; Peng, B.; Wu, H.; Gu, F.; Wang, H. Simulation of auto-follow row detection mechanism in beet harvester based on ADAMS. J. Agric. Mach. 2013, 44, 62–67. [Google Scholar]
- Wang, S.; Hu, Z.; Cheng, C.; Gao, X.; Gu, F.; Wu, H. Bench test and analysis on performance of autofollow row for traction sugar beet combine harvester. J. Agric. Mach. 2020, 51, 103–112 + 163. [Google Scholar]
- Han, K.; Zhu, Z.; Mao, E.; Song, Z.; Xie, B.; Li, M. Joint control method of speed and heading of navigation tractor based on optimal control. J. Agric. Mach. 2013, 44, 165–170. [Google Scholar]
- Jiang, J.; Sun, Y.; Jin, X.; Zhou, Q.; Mao, Z. CAN bus architecture design and test of combine harvester. J. Agric. Mach. 2019, 50, 93–99. [Google Scholar]
- Kan, Y.; Su, J.; Ding, X. Research on hydraulic control strategy of engineering vehicle based on fuzzy PID control. J. Lanzhou Coll. Arts Sci. (Nat. Sci. Ed.) 2022, 36, 78–82, 88. [Google Scholar]
- Lu, J.; Yin, J.; Chen, S.; Li, J.; Wang, G. Design and control research of electric steering wheel system for rice transplanter. J. Agric. Mech. Res. 2022, 44, 259–263. [Google Scholar]
- Miao, P.; Zuo, Z.; Mao, H.; Han, L.; Wang, T.; Wei, F.; Shi, X. Research on automatic alignment control system of electric leaf vegetable harvester. J. Agric. Mech. Res. 2022, 44, 84–89. [Google Scholar]
- Mo, C.; Tai, K.; Deng, S.; Duan, L. PID control parameter optimization strategy based on intelligent algorithm. Inf. Technol. Informatiz. J. 2021, 9, 222–223, 227. [Google Scholar]
- Zhou, Y. Research on Self-Tracking Car Based on Fuzzy-PID Control Algorithm. J. Phys. 2022, 2170, 012012. [Google Scholar] [CrossRef]
- Xie, B.; Yin, W.; Zhu, J. Research on intelligent monitoring system of combine harvester working condition based on CAN bus. J. Jiangsu Agric. Sci. 2012, 40, 382–386. [Google Scholar]
- Chen, G.; Sun, Y.; Li, Q.; He, Q.; Yong, J.; Shen, J. Study on direction self-correcting system for corn harvester automatic alignment. J. Agric. Mech. Res. 2019, 41, 191–195. [Google Scholar]
- Chen, G.; Zhou, P.; He, Q.; Sun, Y.; Li, Q.; Sun, Y. The research and experiment of mechanical contact navigation control system. J. Agric. Mech. Res. 2017, 39, 186–190. [Google Scholar]
- Li, X.; Du, Y.; Guo, J.; Mao, E. Design, simulation, and test of a new threshing cylinder for high moisture content corn. J. Appl. Sci. 2020, 10, 4925. [Google Scholar] [CrossRef]
- Wang, H.; Li, Y.; Qing, Y. Current status and prospect of research on combine harvester header for rape. J. IOP Conf. Ser. Earth Environ. Sci. 2021, 742, 012001. [Google Scholar] [CrossRef]
- Feng, H.; Gao, N.; Meng, Z.; Cheng, L.; Li, Y.; Guo, Y. Design and experiment of deep fertilizer applicator based on autonomous navigation for precise row-following. J. Agric. Mach. 2018, 49, 60–67. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parts | Model | Parameters | Value |
|---|---|---|---|
| Angle sensors | KALAMOYI/P3022-V-CW180 | Output voltage | (0~5) v/(0~180)° |
| Touch bar retaining sleeve | Q235 steel | 0.817 | 40 mm |
| Resetting Torsion Springs | Carbon spring steel | Wire diameter | 3 mm/28 mm/6 mm |
| Touch Bar | Aluminum round tube | Length | 150 mm/200 mm/ 180 mm |
| Parameters | Value |
|---|---|
| Operating voltage (V) | 9–16 |
| Max. output torque (N.M) | 16 |
| Max. speed (RPM) | 120 |
| Response delay (s) | <0.2 |
| Steering error with load (°) | <±5 |
| Communication protocol | CAN2.0B |
| NO. | Set Speed v1 (r/min) | Measured Speed v2 (r/min) | Relative Error (%) | NO. | Set Speed v1 (r/min) | Measured Speed v2 (r/min) | Relative Error (%) |
|---|---|---|---|---|---|---|---|
| 1 | 20 | 20.2 | 1.00 | 11 | 50 | 50.7 | 1.40 |
| 2 | 23 | 23.4 | 1.73 | 12 | 53 | 52.5 | 0.94 |
| 3 | 26 | 25.6 | 1.54 | 13 | 56 | 56.9 | 1.61 |
| 4 | 29 | 29.4 | 1.38 | 14 | 59 | 60.1 | 1.52 |
| 5 | 32 | 32.4 | 1.25 | 15 | 62 | 62.9 | 1.45 |
| 6 | 35 | 35.6 | 1.71 | 16 | 65 | 66.0 | 1.54 |
| 7 | 38 | 38.6 | 1.58 | 17 | 68 | 66.9 | 1.62 |
| 8 | 41 | 41.4 | 0.96 | 18 | 71 | 72.1 | 1.55 |
| 9 | 44 | 43.4 | 1.36 | 19 | 74 | 72.7 | 1.76 |
| 10 | 47 | 46.2 | 1.70 | 20 | 77 | 78.4 | 1.82 |
| NO. | Speed of Advance/(km·h−1) | Deviation Values of Maize Plants from Maize Benchmark Rows | Deviation (Absolute Value) of the Automatic Alignment Trajectory from the Fitted Corn Row | |||||
|---|---|---|---|---|---|---|---|---|
| Maximum Values/cm | Minimum Values/cm | Average Values/cm | Average Values/cm | Standard Deviation/cm | The Percentage of Deviation within ±15 cm/% | The Percentage of Deviation within ±30 cm/% | ||
| 1 | 2.20 | 9.40 | −8.33 | 3.32 | 5.15 | 5.84 | 98.8 | 100 |
| 2 | 2.20 | 11.06 | −10.56 | 3.59 | 5.76 | 5.98 | 98.1 | 100 |
| 3 | 3.40 | 8.25 | −9.63 | 4.64 | 6.43 | 6.79 | 94.3 | 100 |
| 4 | 3.40 | 8.04 | −8.32 | 3.21 | 6.25 | 6.47 | 95.2 | 100 |
| 5 | 4.60 | 16.55 | −10.56 | 5.16 | 7.31 | 7.65 | 92.4 | 100 |
| 6 | 4.60 | 14.52 | −12.21 | 4.08 | 7.06 | 7.33 | 93.7 | 100 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Geng, A.; Hu, X.; Liu, J.; Mei, Z.; Zhang, Z.; Yu, W. Development and Testing of Automatic Row Alignment System for Corn Harvesters. Appl. Sci. 2022, 12, 6221. https://doi.org/10.3390/app12126221
Geng A, Hu X, Liu J, Mei Z, Zhang Z, Yu W. Development and Testing of Automatic Row Alignment System for Corn Harvesters. Applied Sciences. 2022; 12(12):6221. https://doi.org/10.3390/app12126221
Chicago/Turabian StyleGeng, Aijun, Xiaolong Hu, Jiazhen Liu, Zhiyong Mei, Zhilong Zhang, and Wenyong Yu. 2022. "Development and Testing of Automatic Row Alignment System for Corn Harvesters" Applied Sciences 12, no. 12: 6221. https://doi.org/10.3390/app12126221
APA StyleGeng, A., Hu, X., Liu, J., Mei, Z., Zhang, Z., & Yu, W. (2022). Development and Testing of Automatic Row Alignment System for Corn Harvesters. Applied Sciences, 12(12), 6221. https://doi.org/10.3390/app12126221