
Automatic Air-to-Ground Recognition of Outdoor Injured Human Targets Based on UAV Bimodal Information: The Explore Study


Abstract
:1. Introduction
2. Bimodal Information Collection System
2.1. The Optimized Multispectral Sensing Module
2.2. Micro-Bio-Radar Module
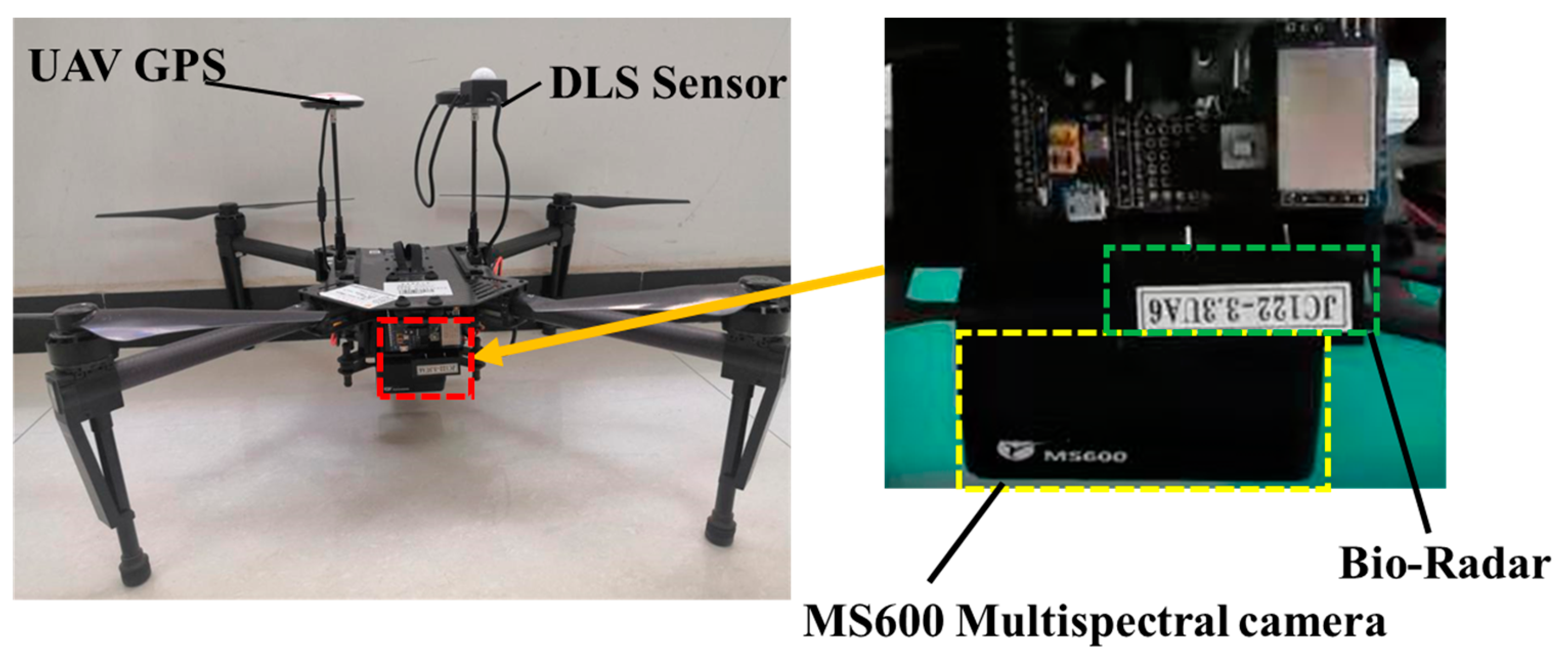
2.3. UAV Carrying System and Ground Workstation
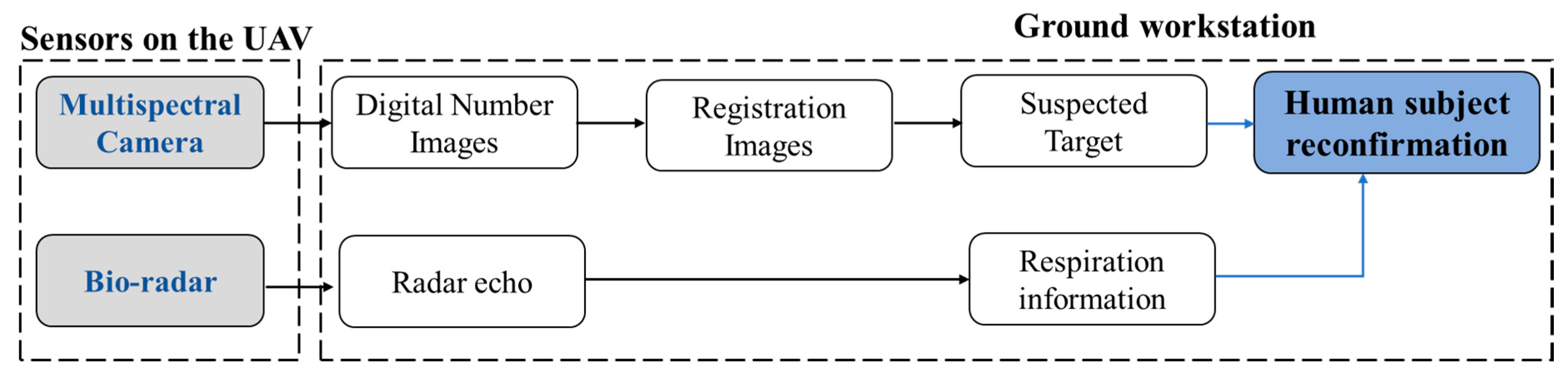
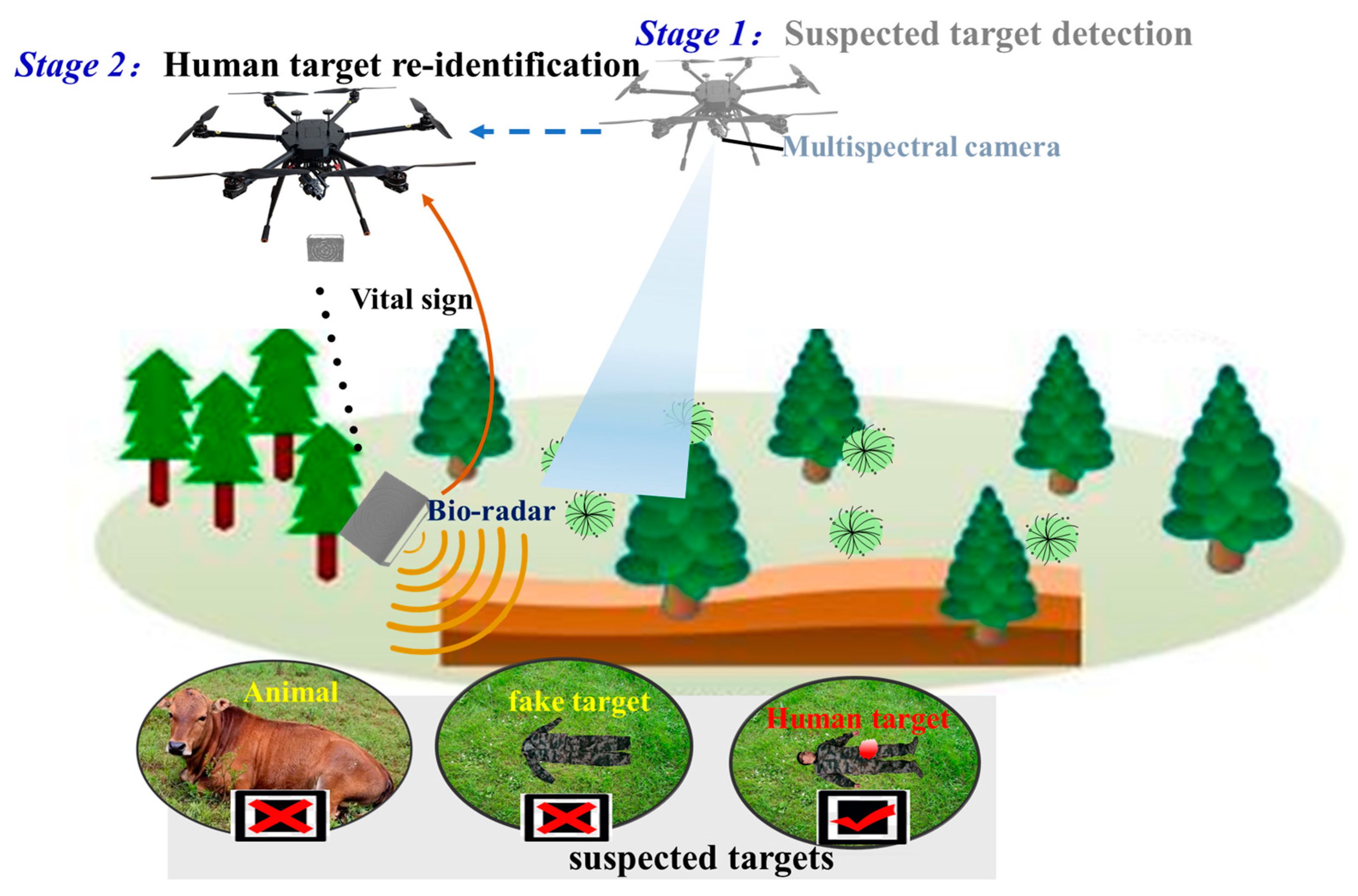
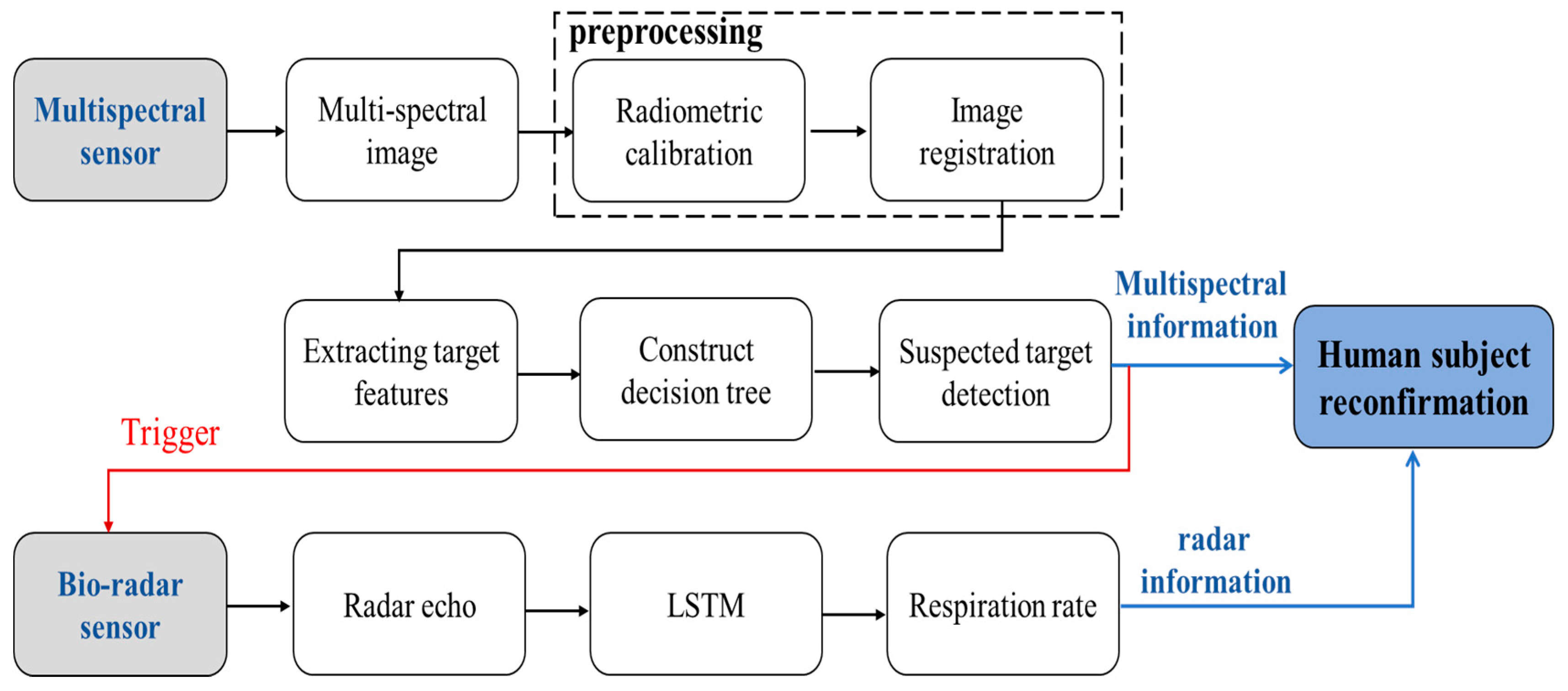
3. Bimodal-Information-Based Human Targets Recognition Method
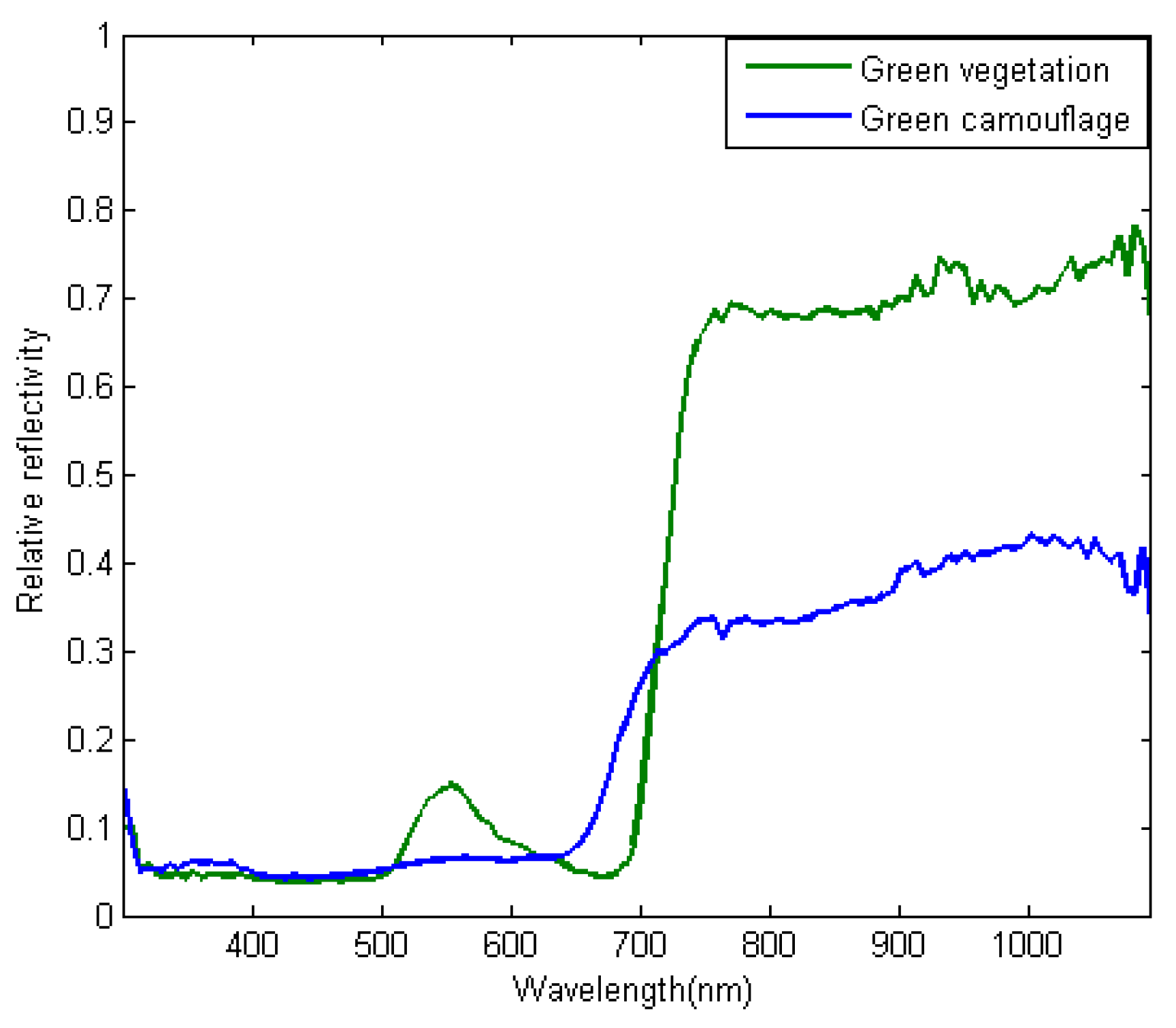
3.1. Suspected Target Detection Based on Multispectral Feature Information
- (1)
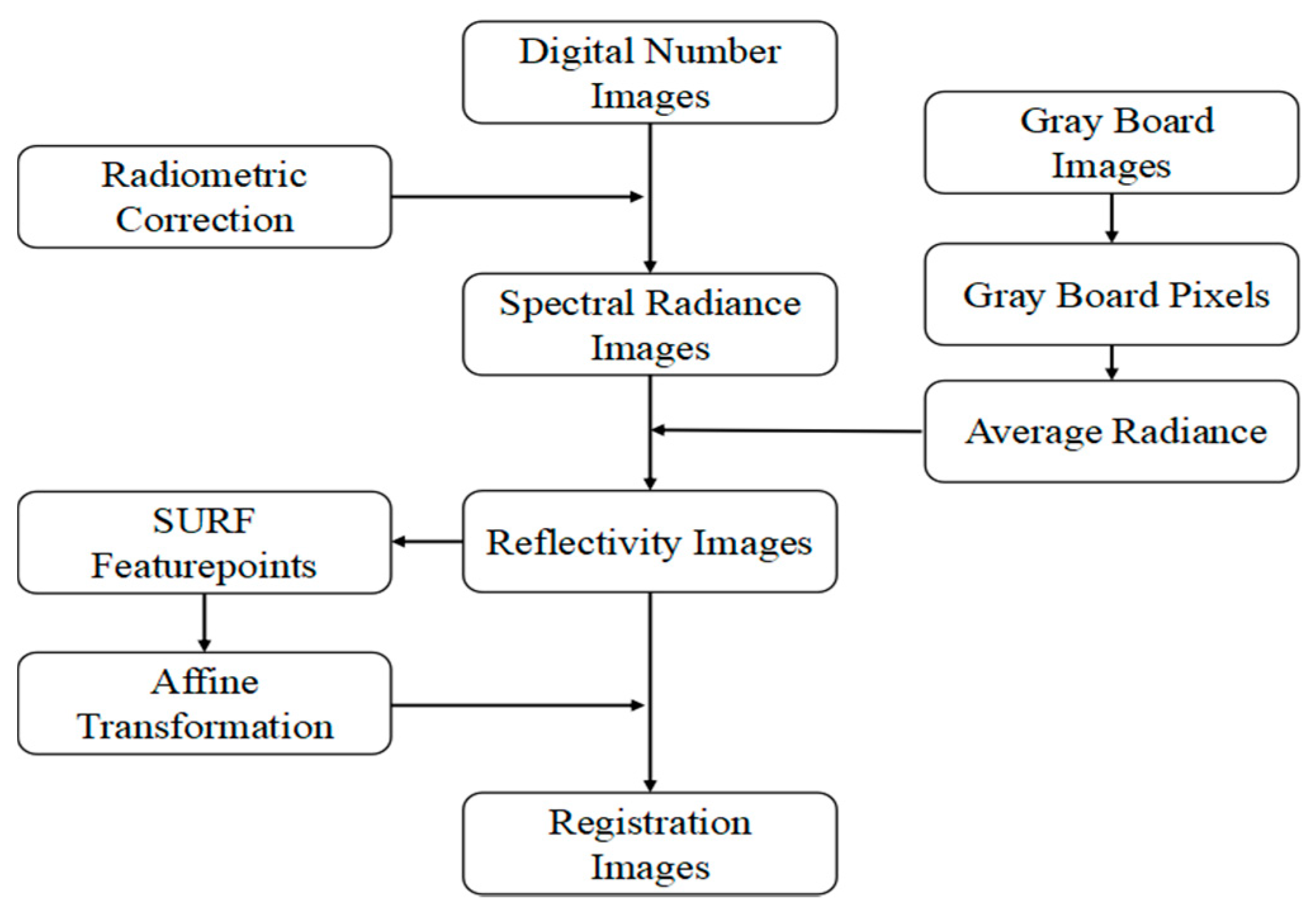
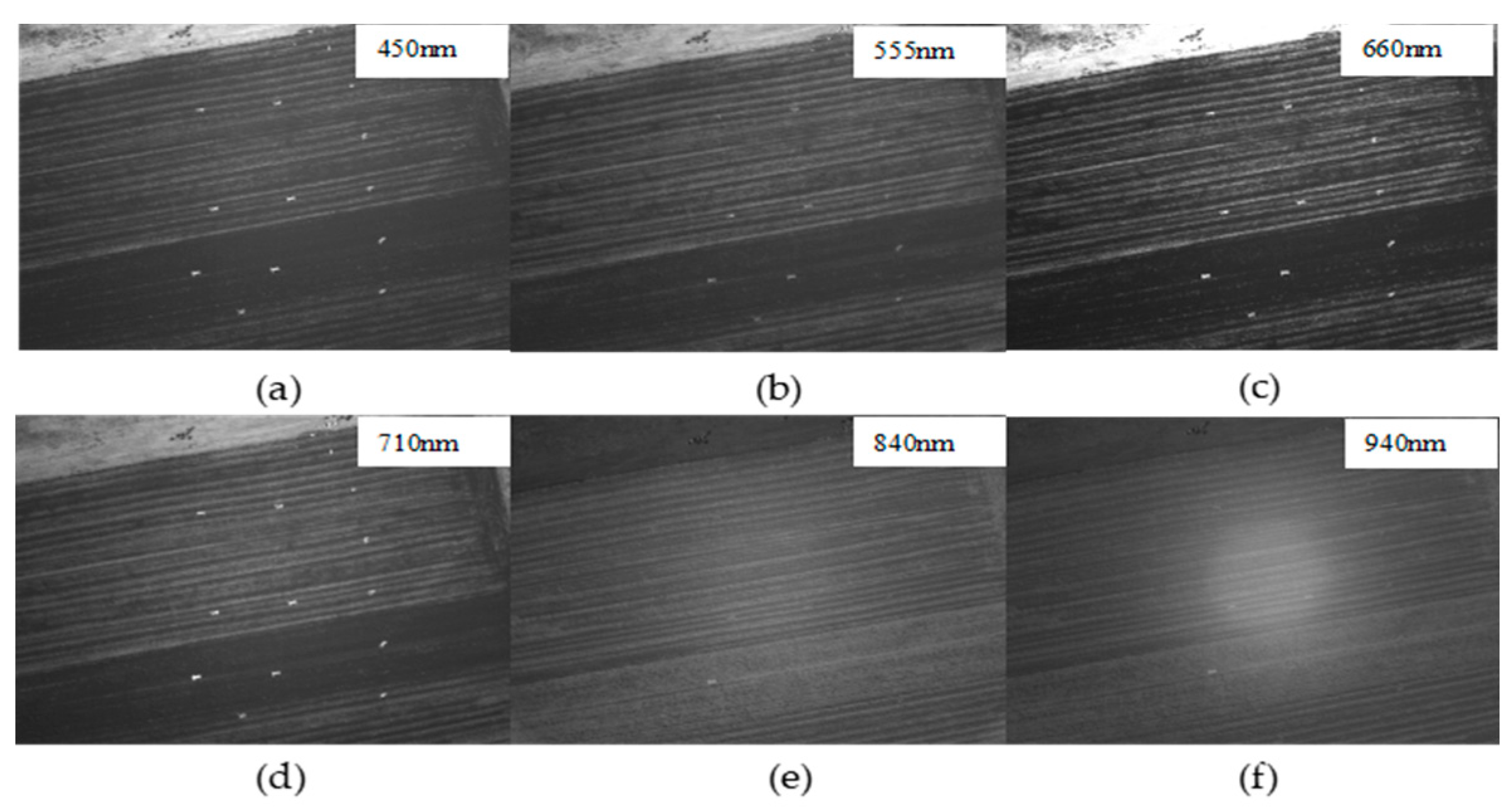
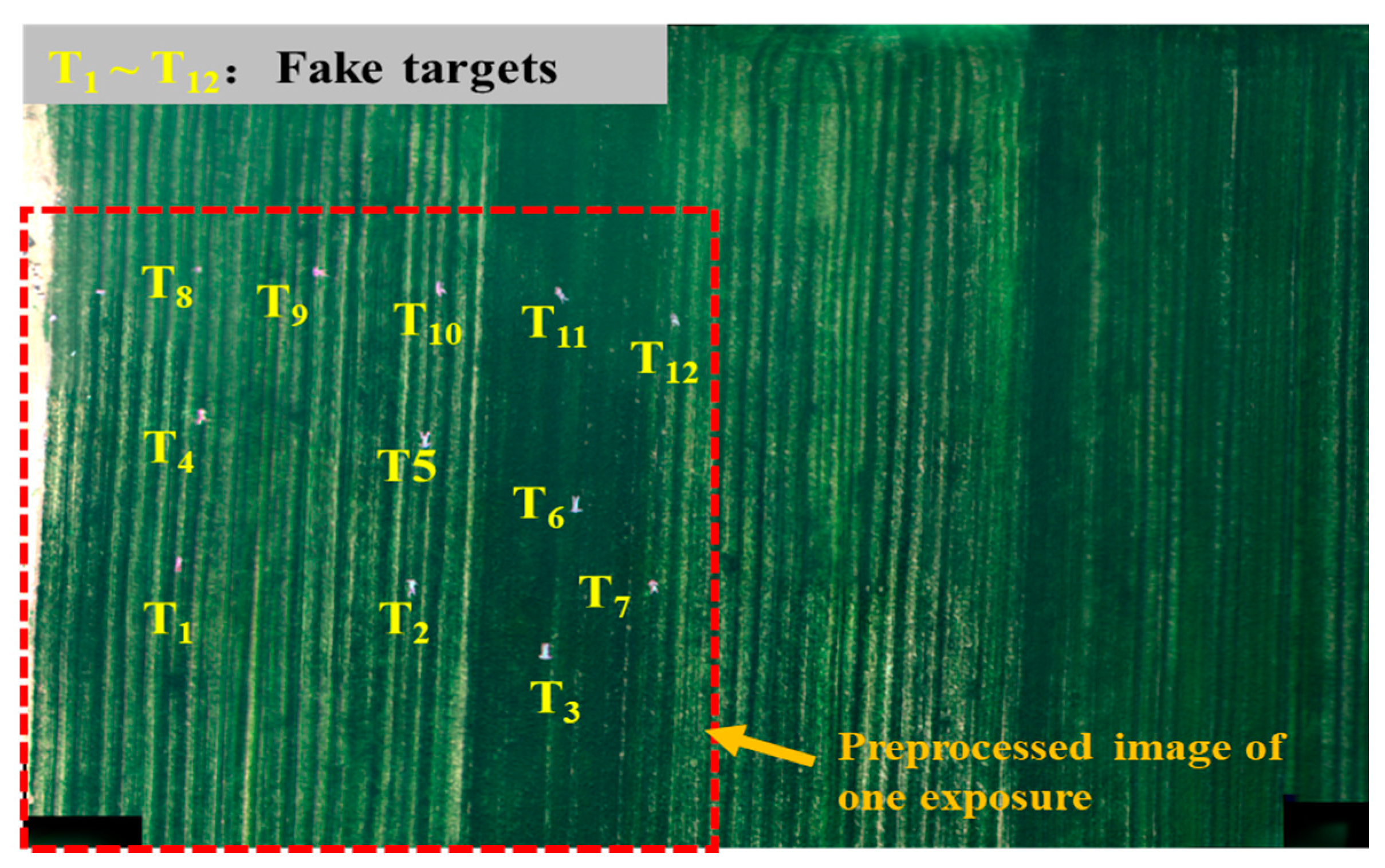
- Multispectral image preprocessing
- (2)
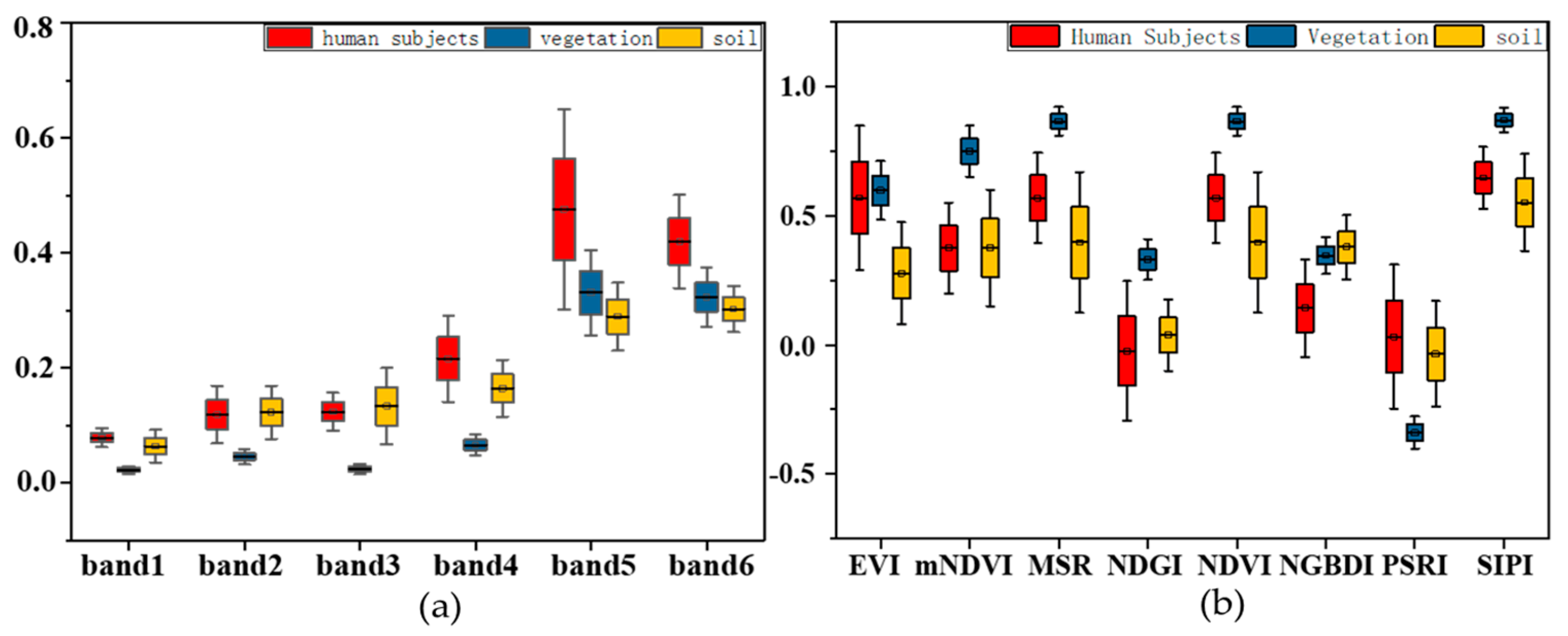
- Multispectral feature extraction
- (3)
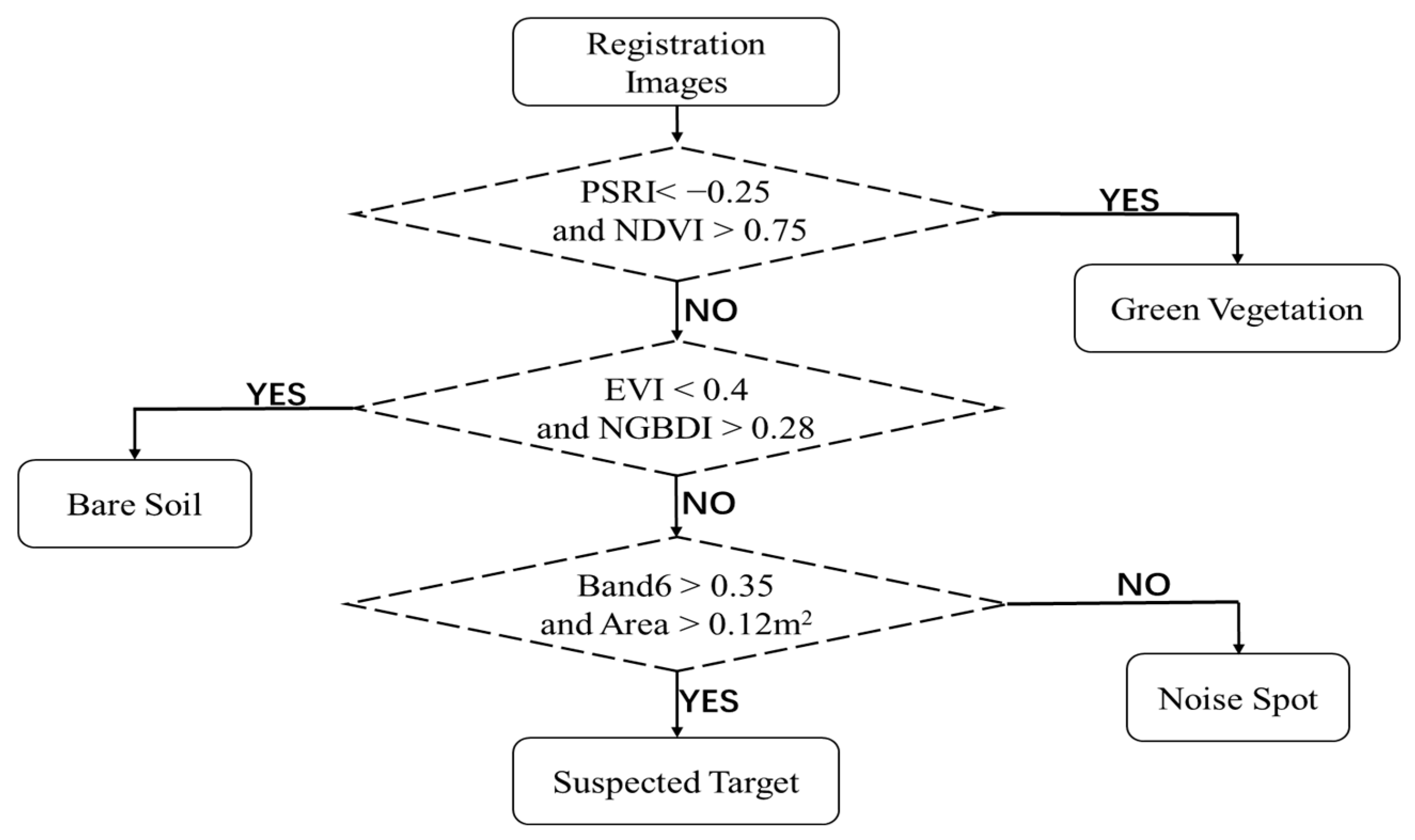
- Decision tree construction for suspected target detection
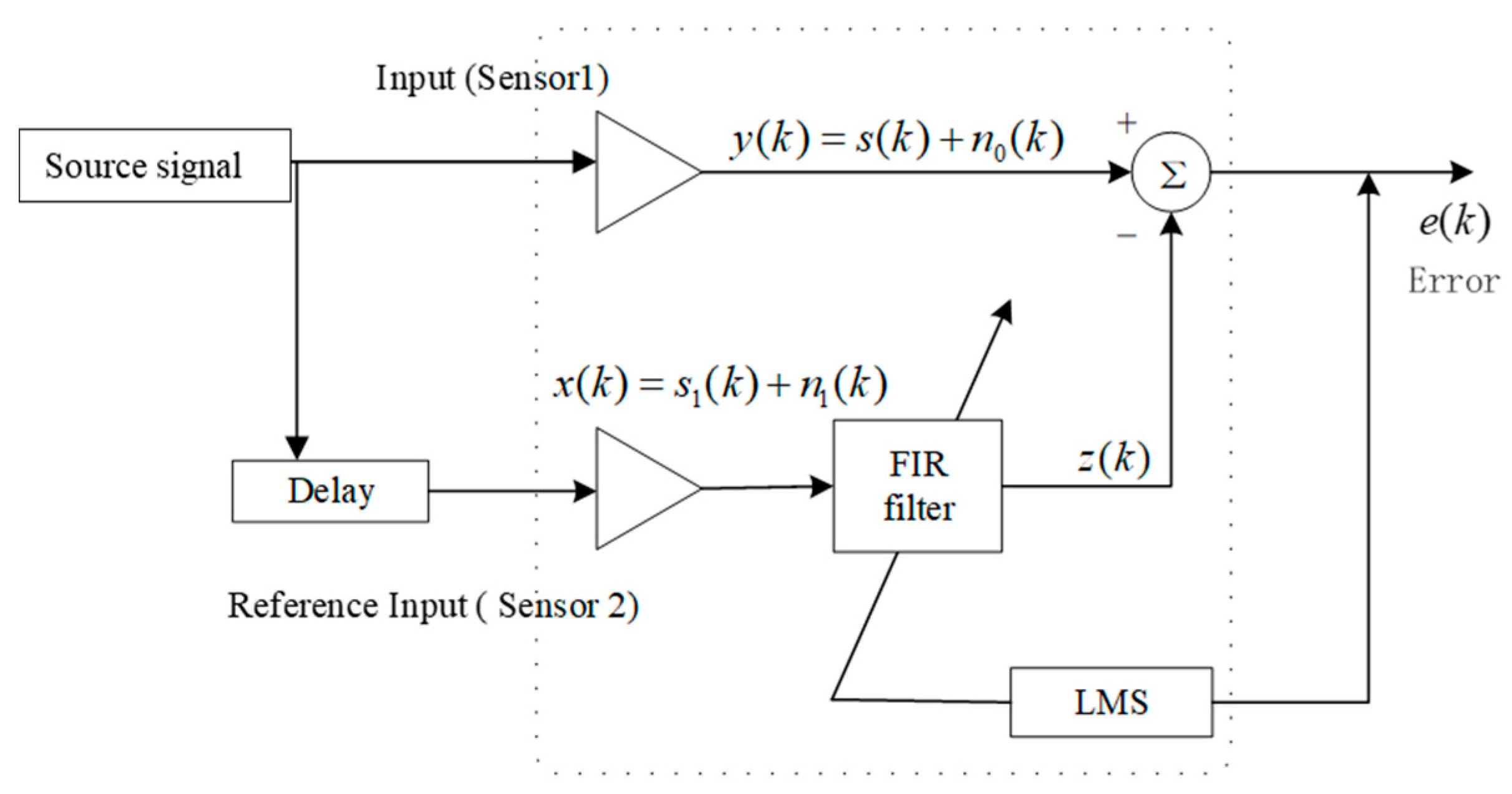
3.2. Human Subject Reconfirmation Based on Respiration Information Detected by Bio-Radar
4. Experiment and Results
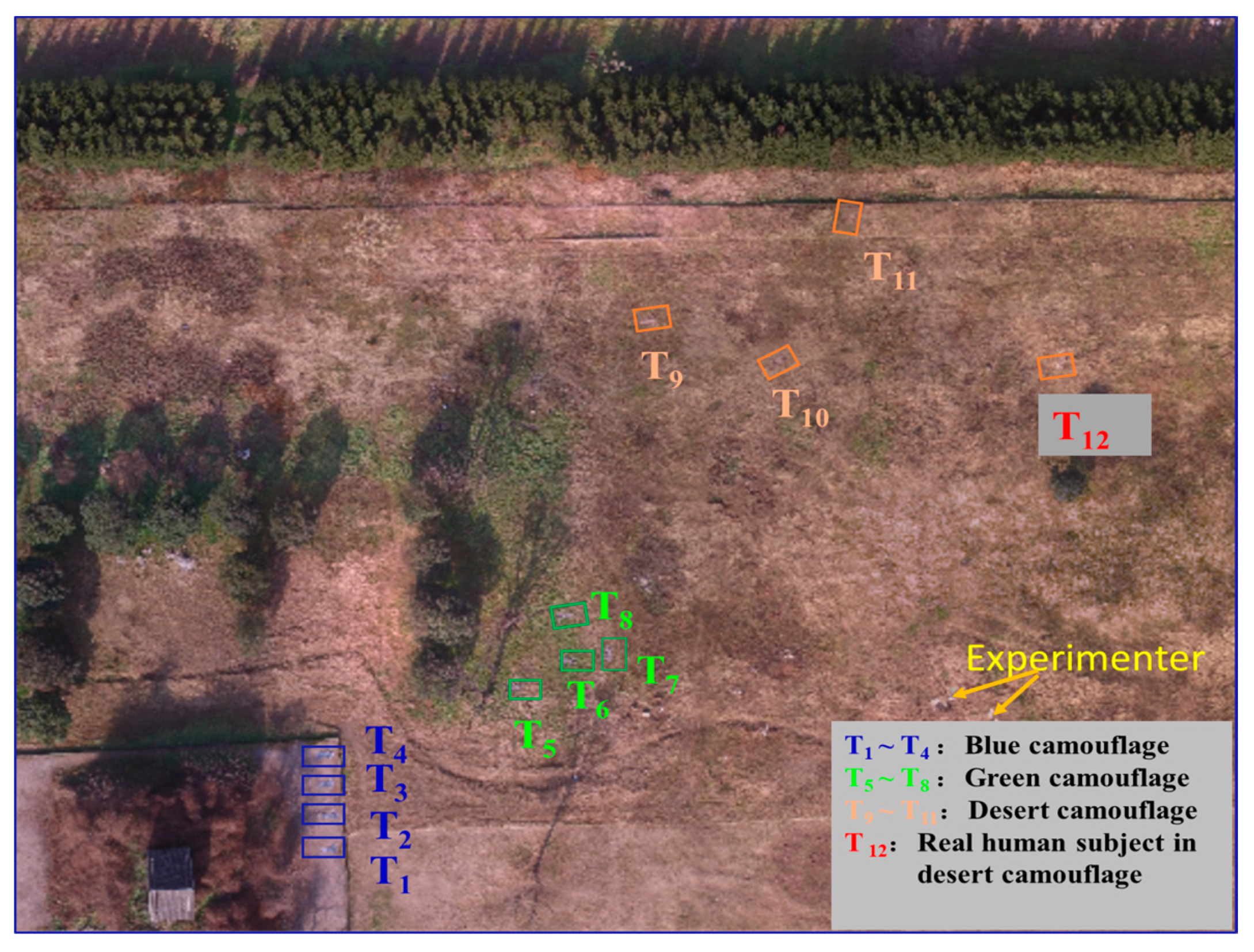
4.1. Experimental Setup
4.2. Preliminary Detection of Suspected Human Targets
- (1)
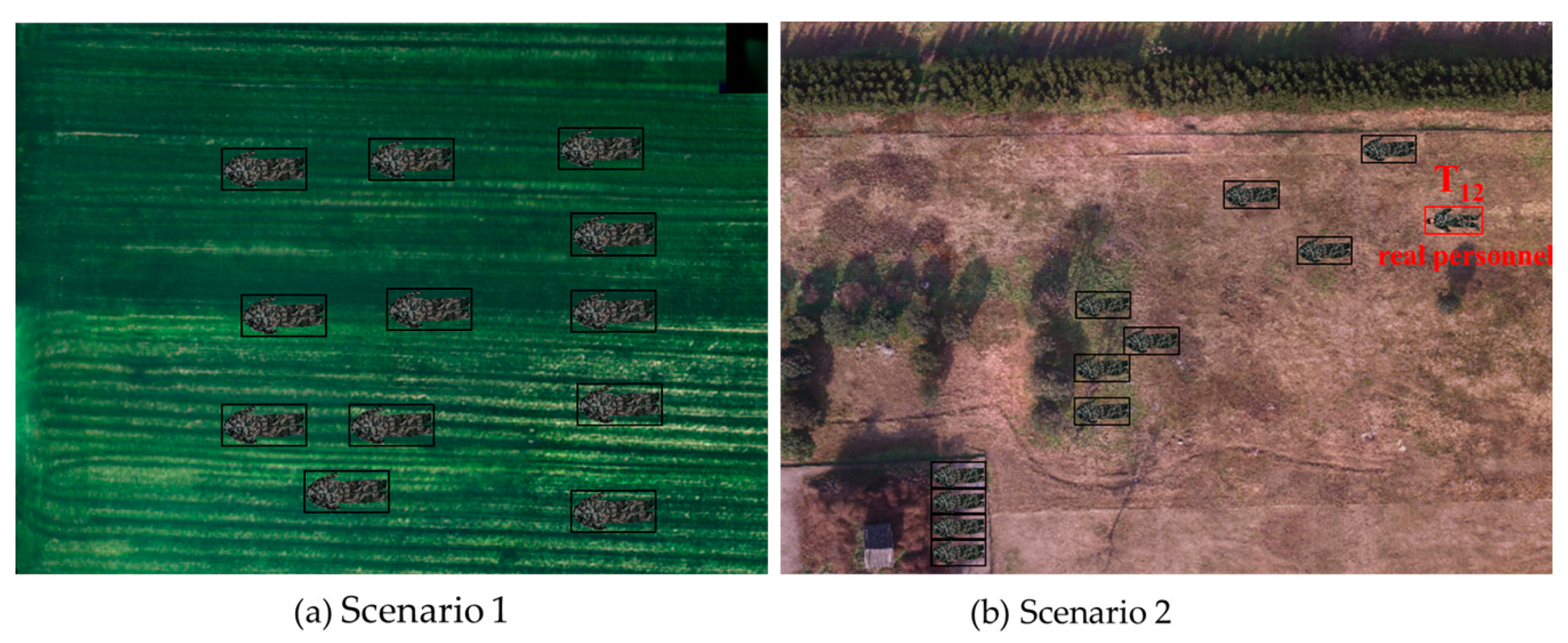
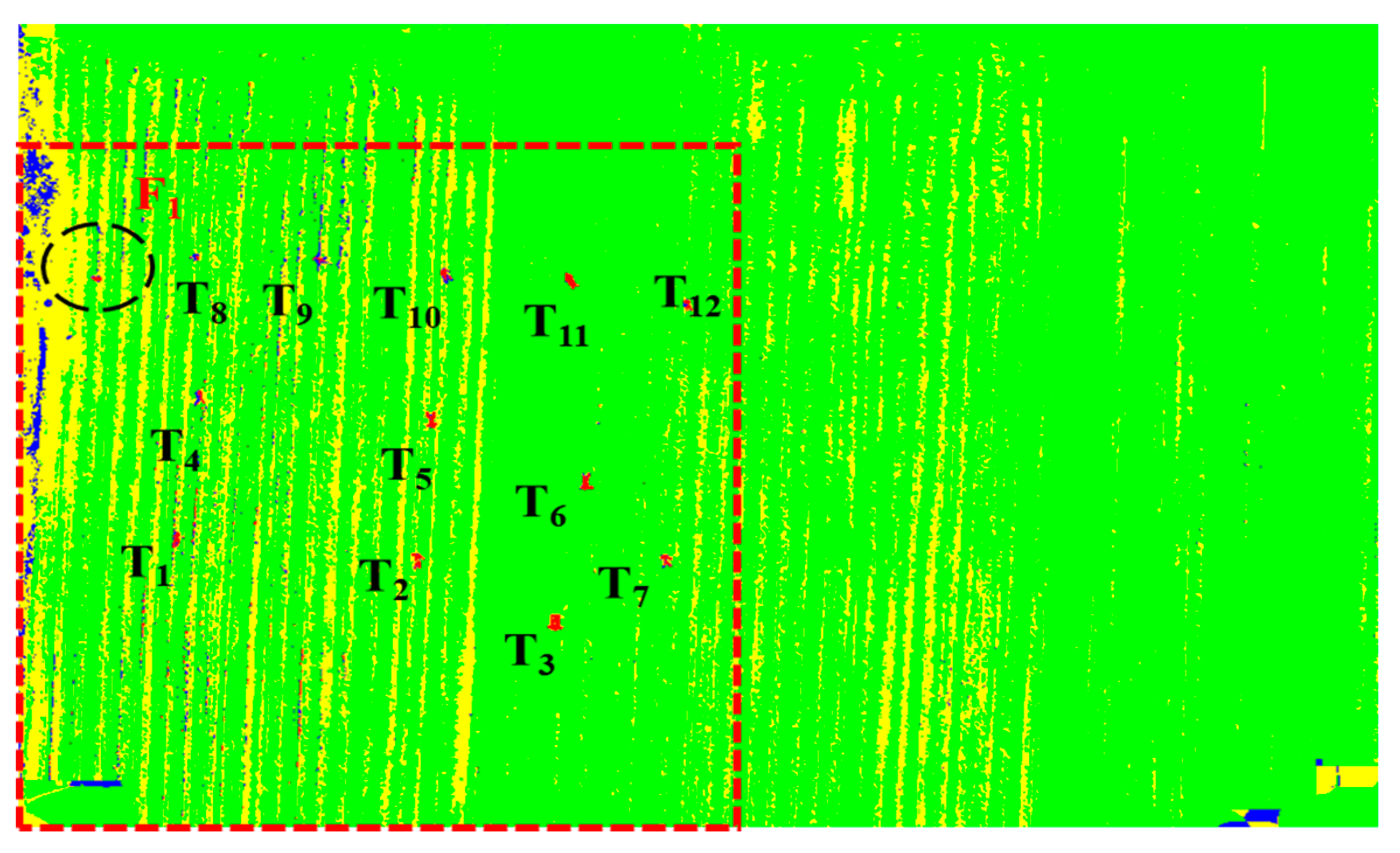
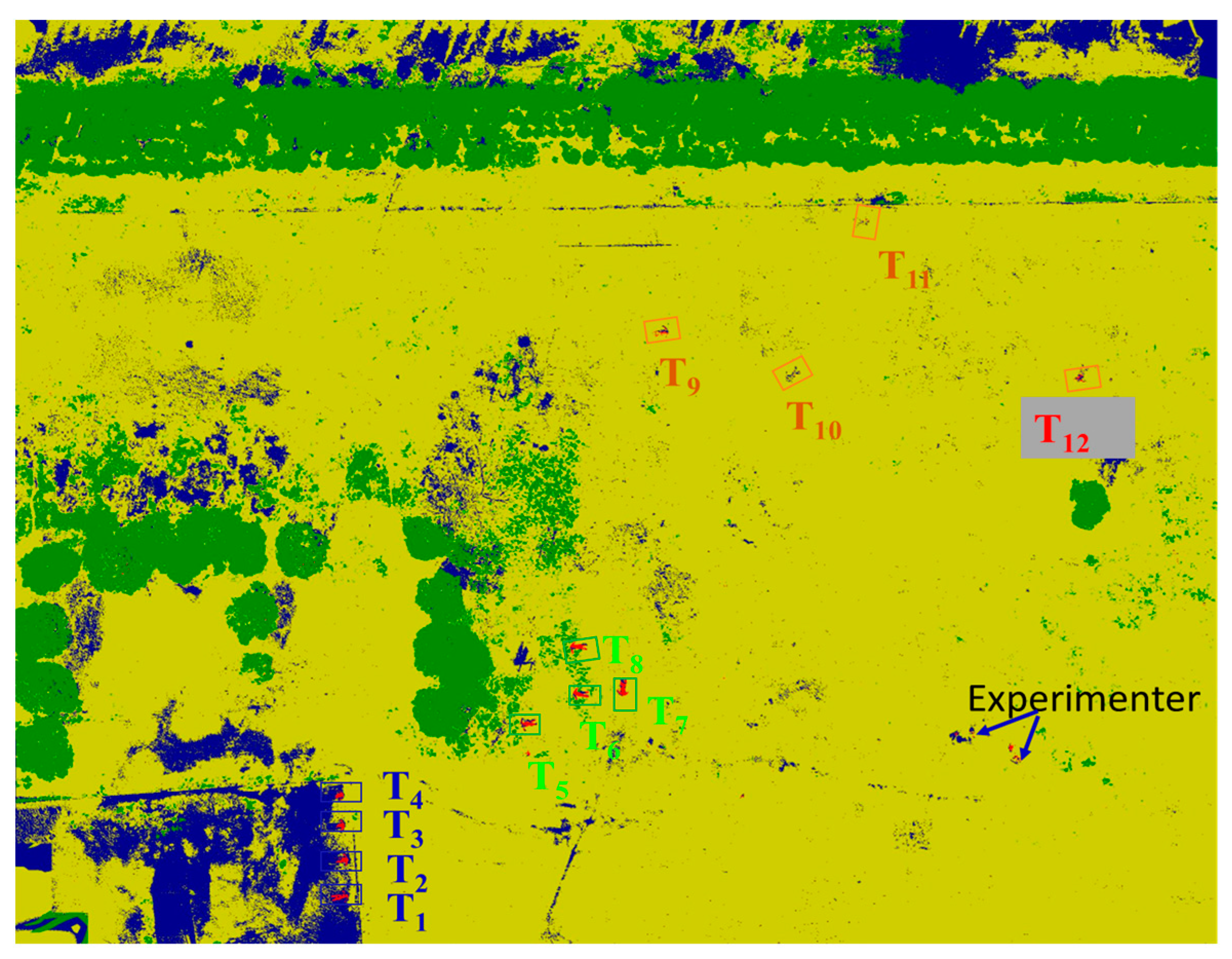
- Suspected human target detection in Scenario 1
- (2)
- Suspected human target detection in Scenario 2
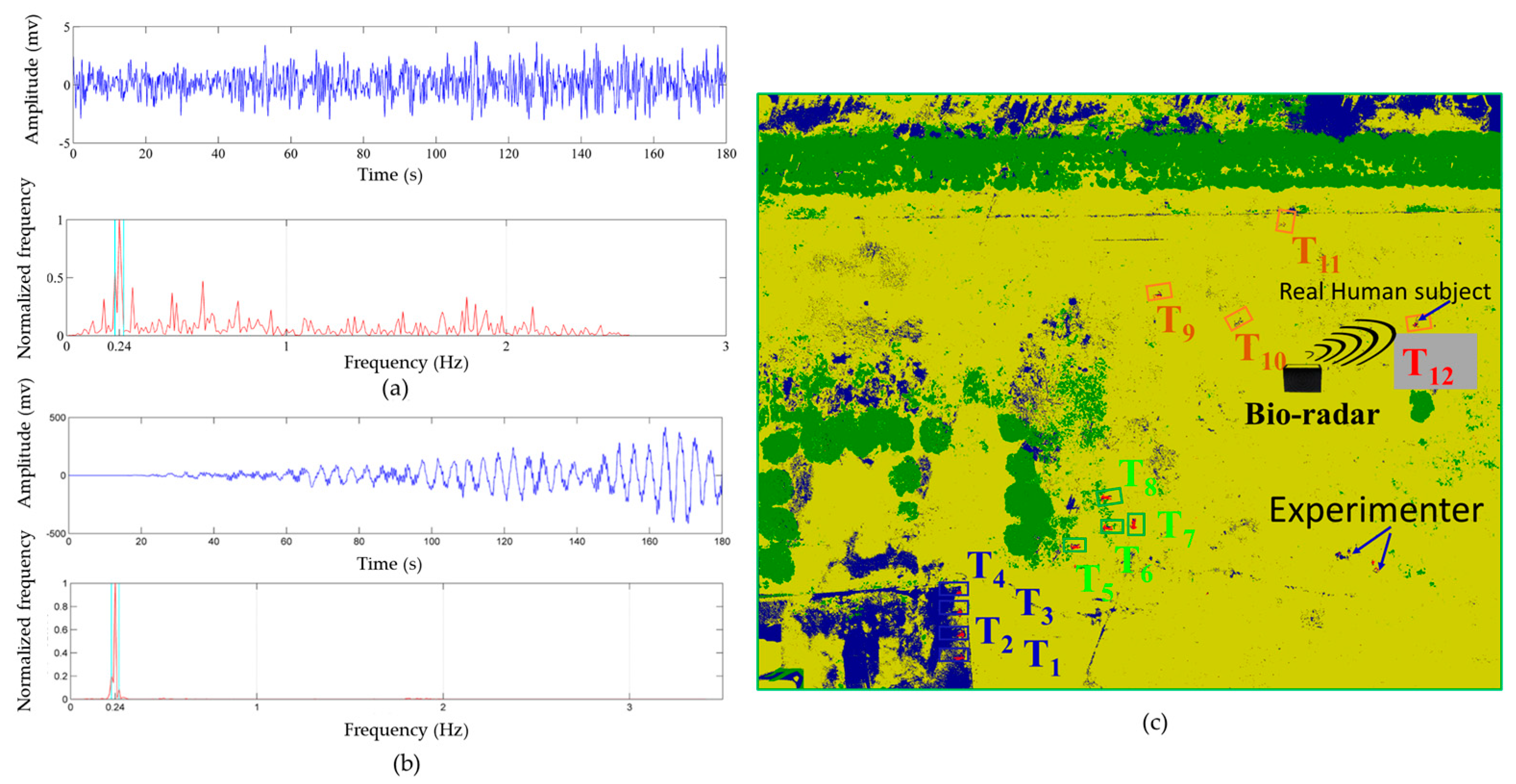
4.3. Accurate Re-Identification of Surviving Human Targets Using Bio-Radar
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Brüggemann, B.; Wildermuth, D.; Schneider, F.E. Search and Retrieval of Human Casualties in Outdoor Environments with Unmanned Ground Systems—System Overview and Lessons Learned from ELROB 2014. In Field and Service Robotics; Springer: Berlin/Heidelberg, Germany, 2016; pp. 533–546. [Google Scholar] [CrossRef]
- Jianqi, W.; Chongxun, Z.; Guohua, L.; Xijing, J. A New Method for Identifying the Life Parameters via Radar. EURASIP J. Adv. Signal Process. 2007, 2007, 031415. [Google Scholar] [CrossRef] [Green Version]
- Guohua, L.; Jianqi, W.; Yu, Y.; Xijing, J. Study of the Ballistocardiogram signal in life detection system based on radar. In Proceedings of the 2007 29th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Lyon, France, 22–26 August 2007; pp. 2191–2194. [Google Scholar]
- Zhang, Y.; Qi, F.; Lv, H.; Liang, F.; Wang, J. Bioradar Technology: Recent Research and Advancements. IEEE Microw. Mag. 2019, 20, 58–73. [Google Scholar] [CrossRef]
- Li, Z.; Li, W.; Lv, H.; Zhang, Y.; Jing, X.; Wang, J. A Novel Method for Respiration-Like Clutter Cancellation in Life Detection by Dual-Frequency IR-UWB Radar. IEEE Trans. Microw. Theory Tech. 2013, 61, 2086–2092. [Google Scholar] [CrossRef]
- Lv, H.; Jiao, T.; Zhang, Y.; An, Q.; Liu, M.; Fulai, L.; Jing, X.; Wang, J. An Adaptive-MSSA-Based Algorithm for Detection of Trapped Victims Using UWB Radar. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1808–1812. [Google Scholar] [CrossRef]
- Lv, H.; Li, W.; Li, Z.; Zhang, Y.; Jiao, T.; Xue, H.; Liu, M.; Jing, X.; Wang, J. Characterization and Identification of IR-UWB Respiratory-Motion Response of Trapped Victims. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7195–7204. [Google Scholar] [CrossRef]
- Ren, W.; Qi, F.; Foroughian, F.; Kvelashvili, T.; Liu, Q.; Kilic, O.; Long, T.; Fathy, A.E. Vital Sign Detection in Any Orientation Using a Distributed Radar Network via Modified Independent Component Analysis. IEEE Trans. Microw. Theory Tech. 2021, 69, 4774–4790. [Google Scholar] [CrossRef]
- Lv, H.; Liu, M.; Jiao, T.; Zhang, Y.; Yu, X.; Li, S.; Jing, X.; Wang, J. Multi-target human sensing via UWB bio-radar based on multiple antennas. In Proceedings of the 2013 IEEE International Conference of IEEE Region 10 (TENCON 2013), Xi’an, China, 22–25 October 2013; pp. 1–4. [Google Scholar] [CrossRef]
- Zhang, Y.; Ma, Y.; Yu, X.; Wang, P.; Lv, H.; Liang, F.; Li, Z.; Wang, J. A coarse-to-fine detection and localization method for multiple human subjects under through-wall condition using a new telescopic SIMO UWB radar. Sens. Actuators A Phys. 2021, 332, 113064. [Google Scholar] [CrossRef]
- Zhao, L.; Yangyang, M.; Yang, Z.; Fulai, L.; Xiao, Y.; Fugui, Q.; Hao, L.; Guohua, L.; Jianqi, W. UWB Radar Features for Distinguishing Humans From Animals in an Actual Post-Disaster Trapped Scenario. IEEE Access 2021, 9, 154347–154354. [Google Scholar] [CrossRef]
- Ma, Y.; Liang, F.; Wang, P.; Lv, H.; Yu, X.; Zhang, Y. An Accurate Method to Distinguish Between Stationary Human and Dog targets Under Through-Wall Condition Using UWB Radar. Remote Sens. 2019, 11, 2571. [Google Scholar] [CrossRef] [Green Version]
- Qi, F.; Li, Z.; Ma, Y.; Liang, F.; Lv, H.; Wang, J.; Fathy, A.E. Generalization of Channel Micro-Doppler Capacity Evaluation for Improved Finer-Grained Human Activity Classification Using MIMO UWB Radar. IEEE Trans. Microw. Theory Tech. 2021, 69, 4748–4761. [Google Scholar] [CrossRef]
- Qi, F.; Lv, H.; Wang, J.; Fathy, A.E. Quantitative Evaluation of Channel Micro-Doppler Capacity for MIMO UWB Radar Human Activity Signals Based on Time–Frequency Signatures. IEEE Trans. Geosci. Remote Sens. 2020, 58, 6138–6151. [Google Scholar] [CrossRef]
- Xia, H. 16 Dead During Mountain Marathon in China’s Gansu. Available online: http://www.xinhuanet.com/english/2021-05/23/c_139963997_2.htm (accessed on 23 May 2021).
- Takagi, Y.; Yamada, K.; Goto, A.; Yamada, M.; Naka, T.; Miyazaki, S. Life Search—A Smartphone Application for Disaster Education and Rescue. In Proceedings of the 2017 Nicograph International (NicoInt), Kyoto, Japan, 2–3 June 2017; p. 94. [Google Scholar] [CrossRef]
- Maciel-Pearson, B.G.; Akcay, S.; Atapour-Abarghouei, A.; Holder, C.; Breckon, T.P. Multi-Task Regression-Based Learning for Autonomous Unmanned Aerial Vehicle Flight Control Within Unstructured Outdoor Environments. IEEE Robot. Autom. Lett. 2019, 4, 4116–4123. [Google Scholar] [CrossRef] [Green Version]
- Hou, X.; Bergmann, J. Pedestrian Dead Reckoning With Wearable Sensors: A Systematic Review. IEEE Sens. J. 2020, 21, 143–152. [Google Scholar] [CrossRef]
- Rosser, J.C.; Vignesh, V.; Terwilliger, B.A.; Parker, B.C. Surgical and Medical Applications of Drones: A Comprehensive Review. J. Soc. Laparoendosc. Surg. 2018, 22, e2018.00018. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sun, J.; Song, J.; Chen, H.; Huang, X.; Liu, Y. Autonomous State Estimation and Mapping in Unknown Environments with Onboard Stereo Camera for MAVs. IEEE Trans. Ind. Inform. 2019, 16, 5746–5756. [Google Scholar] [CrossRef]
- Bency, A.J.; Karthikeyan, S.; De Leo, C.; Sunderrajan, S.; Manjunath, B.S. Search Tracker: Human-Derived Object Tracking in the Wild Through Large-Scale Search and Retrieval. IEEE Trans. Circuits Syst. Video Technol. 2016, 27, 1803–1814. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Song, B.; Du, X.; Guizani, M. Infrared Small Target Detection Through Multiple Feature Analysis Based on Visual Saliency. IEEE Access 2019, 7, 38996–39004. [Google Scholar] [CrossRef]
- Lygouras, E.; Santavas, N.; Taitzoglou, A.; Tarchanidis, K.; Mitropoulos, A.; Gasteratos, A. Unsupervised Human Detection with an Embedded Vision System on a Fully Autonomous UAV for Search and Rescue Operations. Sensors 2019, 19, 3542. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jiang, J.; Zheng, H.; Ji, X.; Cheng, T.; Tian, Y.; Zhu, Y.; Cao, W.; Ehsani, R.; Yao, X. Analysis and Evaluation of the Image Preprocessing Process of a Six-Band Multispectral Camera Mounted on an Unmanned Aerial Vehicle for Winter Wheat Monitoring. Sensors 2019, 19, 747. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jeowicki, Ł.; Sosnowicz, K.; Ostrowski, W.; Osińska-Skotak, K.; Bakuła, K. Evaluation of Rapeseed Winter Crop Damage Using UAV-Based Multispectral Imagery. Remote Sens. 2020, 12, 2618. [Google Scholar] [CrossRef]
- Shi, X.; Han, W.; Zhao, T.; Tang, J. Decision Support System for Variable Rate Irrigation Based on UAV Multispectral Remote Sensing. Sensors 2019, 19, 2880. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nisio, A.D.; Adamo, F.; Acciani, G.; Attivissimo, F. Fast Detection of Olive Trees Affected by Xylella Fastidiosa from UAVs Using Multispectral Imaging. Sensors 2020, 20, 4915. [Google Scholar] [CrossRef] [PubMed]
- OPTOSKY. ATP9100 Portable Object Spectrometer. Available online: https://www.optosky.com/ (accessed on 11 February 2022).
- Li, C.; Chen, F.; Qi, F.; Liu, M.; Li, Z.; Liang, F.; Jing, X.; Lü, G.; Wang, J. Searching for Survivors through Random Human-Body Movement Outdoors by Continuous-Wave Radar Array. PLoS ONE 2016, 11, e0152201. [Google Scholar] [CrossRef] [PubMed]
- DJI. M100 Quad-Rotor UAV System. Available online: https://www.dji.com/cn/matrice100 (accessed on 12 February 2022).
- Imai, M.; Kurihara, J.; Kouyama, T.; Kuwahara, T.; Fujita, S.; Sakamoto, Y.; Sato, Y.; Saitoh, S.-I.; Hirata, T.; Yamamoto, H.; et al. Radiometric Calibration for a Multispectral Sensor Onboard RISESAT Microsatellite Based on Lunar Observations. Sensors 2021, 21, 2429. [Google Scholar] [CrossRef]
- Bansal, M.; Kumar, M.; Kumar, M. 2D object recognition: A comparative analysis of SIFT, SURF and ORB feature descriptors. Multimed. Tools Appl. 2021, 80, 18839–18857. [Google Scholar] [CrossRef]
- Wang, G.; Sun, X.; Shang, Y.; Wang, Z.; Shi, Z.; Yu, Q. Two-View Geometry Estimation Using RANSAC With Locality Preserving Constraint. IEEE Access 2020, 8, 7267–7279. [Google Scholar] [CrossRef]
- Berhane, T.M.; Lane, C.R.; Wu, Q.; Autrey, B.C.; Anenkhonov, O.A.; Chepinoga, V.V.; Liu, H. Decision-Tree, Rule-Based, and Random Forest Classification of High-Resolution Multispectral Imagery for Wetland Mapping and Inventory. Remote Sens. 2018, 10, 580. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Qi, F.; Li, C.; Wang, S.; Zhang, H.; Wang, J.; Lu, G. Contact-Free Detection of Obstructive Sleep Apnea Based on Wavelet Information Entropy Spectrum Using Bio-Radar. Entropy 2016, 18, 306. [Google Scholar] [CrossRef] [Green Version]
- Ma, Y.; Wang, P.; Huang, W.; Qi, F.; Liang, F.; Lv, H.; Yu, X.; Wang, J.; Zhang, Y. A robust multi-feature based method for distinguishing between humans and pets to ensure signal source in vital signs monitoring using UWB radar. EURASIP J. Adv. Signal Process. 2021, 2021, 27. [Google Scholar] [CrossRef]
- Wang, P.; Zhang, Y.; Ma, Y.; Liang, F.; An, Q.; Xue, H.; Yu, X.; Lv, H.; Wang, J. Method for distinguishing humans and animals in vital signs monitoring using IR-UWB radar. Int. J. Environ. Res. Public Health 2019, 16, 4462. [Google Scholar] [CrossRef] [PubMed] [Green Version]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Band Number | Band Name | Centre Wavelength (nm) | Bandwidth (nm) |
|---|---|---|---|
| 1 | blue | 450 ± 3 nm | 22 ± 5 nm |
| 2 | green | 555 ± 3 nm | 22 ± 5 nm |
| 3 | red | 660 ± 3 nm | 22 ± 5 nm |
| 4 | red edge | 710 ± 3 nm | 32 ± 5 nm |
| 5 | near-infrared | 840 ± 3 nm | 32 ± 5 nm |
| 6 | 940 ± 3 nm | 32 ± 5 nm |
| Number | Calculation Formula | Number | Calculation Formula |
|---|---|---|---|
| 1 | 5 | ||
| 2 | 6 | ||
| 3 | 7 | ||
| 4 | 8 |
| ML Algorithms | Accuracy | F1 Score |
|---|---|---|
| DT | 99.76% | 98.08% |
| BP | 99.58% | 99.62% |
| RF | 99.37% | 99.41% |
| SVM | 99.65% | 99.67% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qi, F.; Zhu, M.; Li, Z.; Lei, T.; Xia, J.; Zhang, L.; Yan, Y.; Wang, J.; Lu, G. Automatic Air-to-Ground Recognition of Outdoor Injured Human Targets Based on UAV Bimodal Information: The Explore Study. Appl. Sci. 2022, 12, 3457. https://doi.org/10.3390/app12073457
Qi F, Zhu M, Li Z, Lei T, Xia J, Zhang L, Yan Y, Wang J, Lu G. Automatic Air-to-Ground Recognition of Outdoor Injured Human Targets Based on UAV Bimodal Information: The Explore Study. Applied Sciences. 2022; 12(7):3457. https://doi.org/10.3390/app12073457
Chicago/Turabian StyleQi, Fugui, Mingming Zhu, Zhao Li, Tao Lei, Juanjuan Xia, Linyuan Zhang, Yili Yan, Jianqi Wang, and Guohua Lu. 2022. "Automatic Air-to-Ground Recognition of Outdoor Injured Human Targets Based on UAV Bimodal Information: The Explore Study" Applied Sciences 12, no. 7: 3457. https://doi.org/10.3390/app12073457