1. Introduction
This paper presents an alternative solution to overcome the drawbacks of the boundary element method (BEM). The conventional BEM solves the continuum mechanics problems by using the reciprocal work theorem also known as Betti’s theorem, the Navier–Cauchy equations, and the divergence theorem. The divergence theorem simplifies the continuum mechanics equations solution by modeling only at the boundaries [
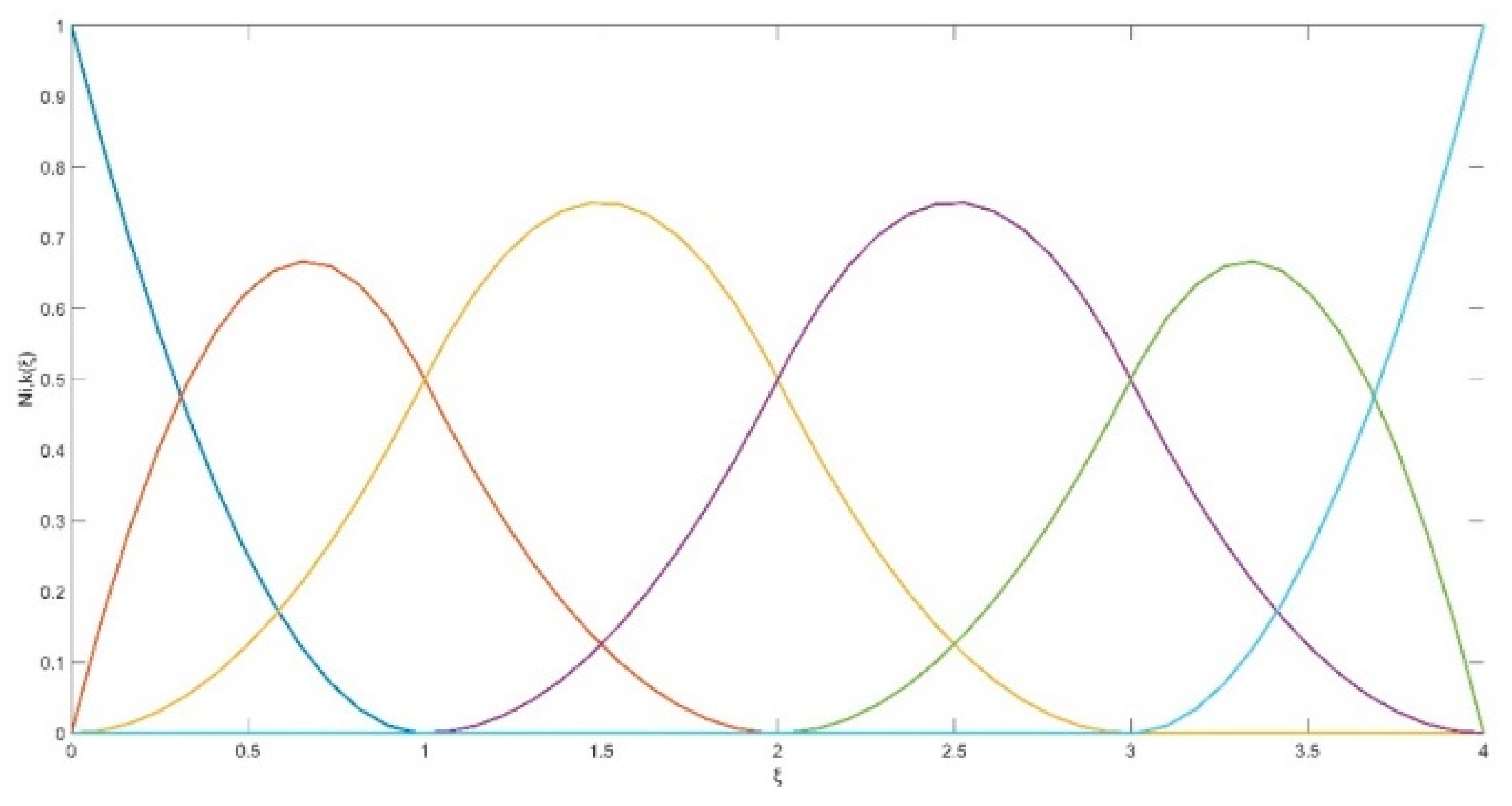
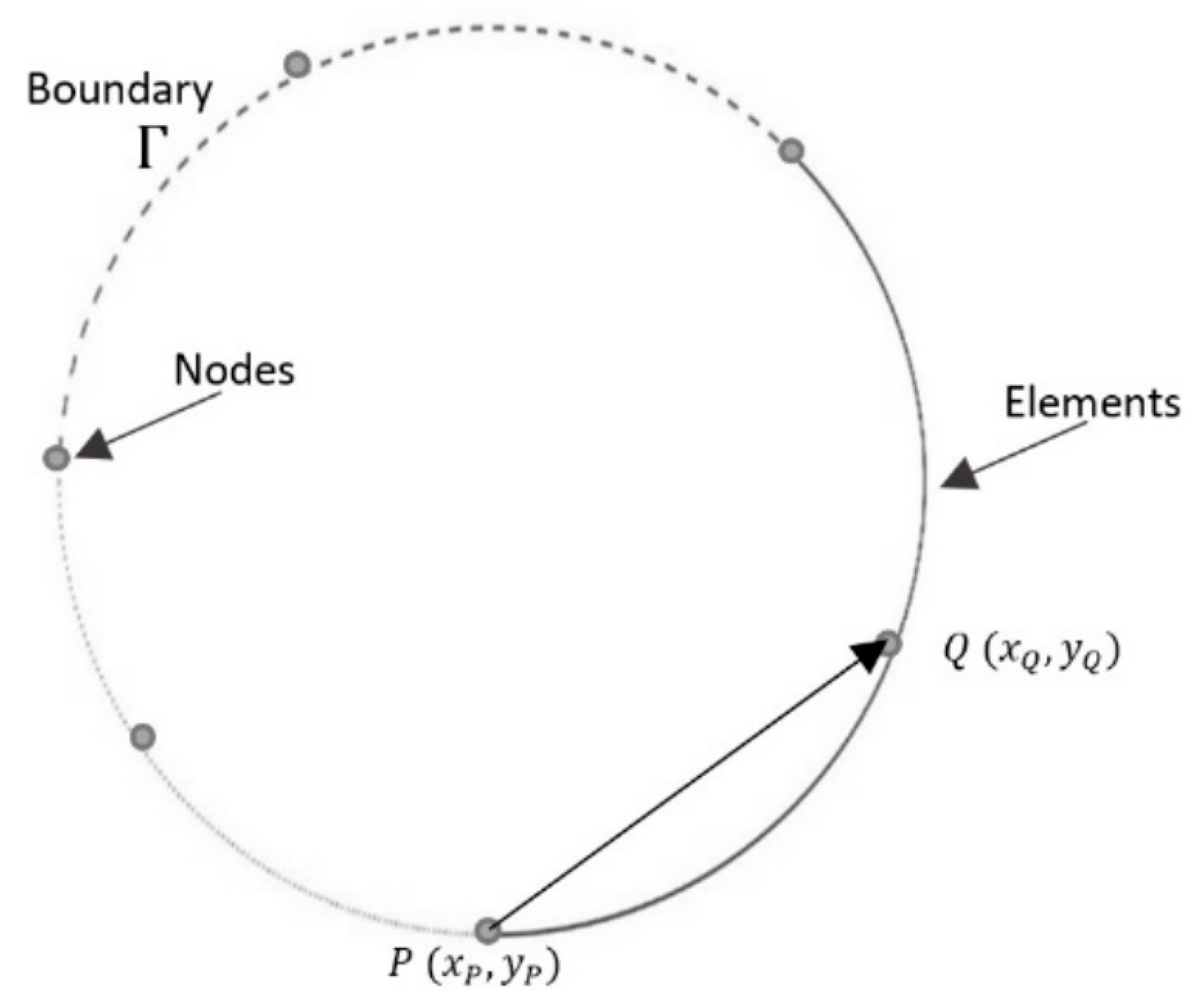
1]. Such modeling consists of dividing the boundary of the body under analysis into a discrete set of functions, denominated “elements” with nodes, and describing the displacements and tractions by polynomial functions. Since BEM is a consequence of the Betti’s theorem, there are two sets of displacements and tractions. One set is known in advance through entities called traction and displacement kernels, which are valid for any equilibrium geometry. The other set belongs to the body under analysis which is the problem to be solved. Naturally, to obtain a unique solution, boundary conditions such as prescribed tractions and displacements must be applied. The calculated traction and displacement kernels depend on the normal of the surface, the geometric variable, and the interpolation points that describe the boundary. However, the discretization process produces a lack of continuity on the boundary.
An alternative to solve this problem is to use the Non-Uniform Rational B-Splines functions (NURBS) from the CAD model instead of using interpolation functions. This concept was called Isogeometric Analysis (IGA), and it was proposed by Hughes et al. [
2] in 2005. Initially, the IGA was used with the FEM framework, but eventually, it was combined with BEM and with the finite cell method (FD).
Simpson et al. [
3,
4] proposed the Isogeometric Boundary Element Method (IGA-BEM) in 2012 and established the guidelines for combining IGA with BEM, e.g., how the elements are generated using the NURBS knot vector and the NURBS basis functions. They also used the Greville abscissae scheme to get the collocation points and the displacement and traction kernels. Finally, they applied the method to solve the L-plate, the hole-within-an-infinite-plate, and the L-shaped wedge problems.
Takahashi and Matsumoto [
5] proposed an IGA-BEM combined with the fast multipole method (FMM), to decrease the control points of the NURBS. They proved that this combination could achieve the same accuracy as the conventional BEM but with fewer degrees of freedom and less computing time. Peake et al. [
6] presented an extended IGA-BEM using a partition-of-unity method on NURBS functions; they applied it to solve a two-dimensional Helmholtz problem. Likewise, Scott et al. [
7] refined the IGA-BEM, using T-Splines instead of NURBS, to solve linear elastostatic problems; they showed the performance of this method with a patch test and a propeller analysis. Moreover, Lian et al. [
8] continued the work of [
3,
4,
7], and they used the T-Splines with IGA-BEM, to optimize the shape of three-dimensional elastic bodies; they chose the control points as design variables to modify the geometry.
The IGA-BEM combination was not only used to reduce the degrees of freedom, changing basis functions, or solving linear problems. For example, Gong and Dong [
9] developed a method to calculate the singular integrals on a 3D potential problem and Heltai et al. [
10] used IGA-BEM to analyze 3D Stock flows. Peng et al. [
11] used a geometric algorithm to propagate fractures, based on the fatigue Paris law, and IGA-BEM to analyze them. Venas and Kvamsdal [
12] used IGA-BEM to solve the acoustic scattering problem of a submarine.
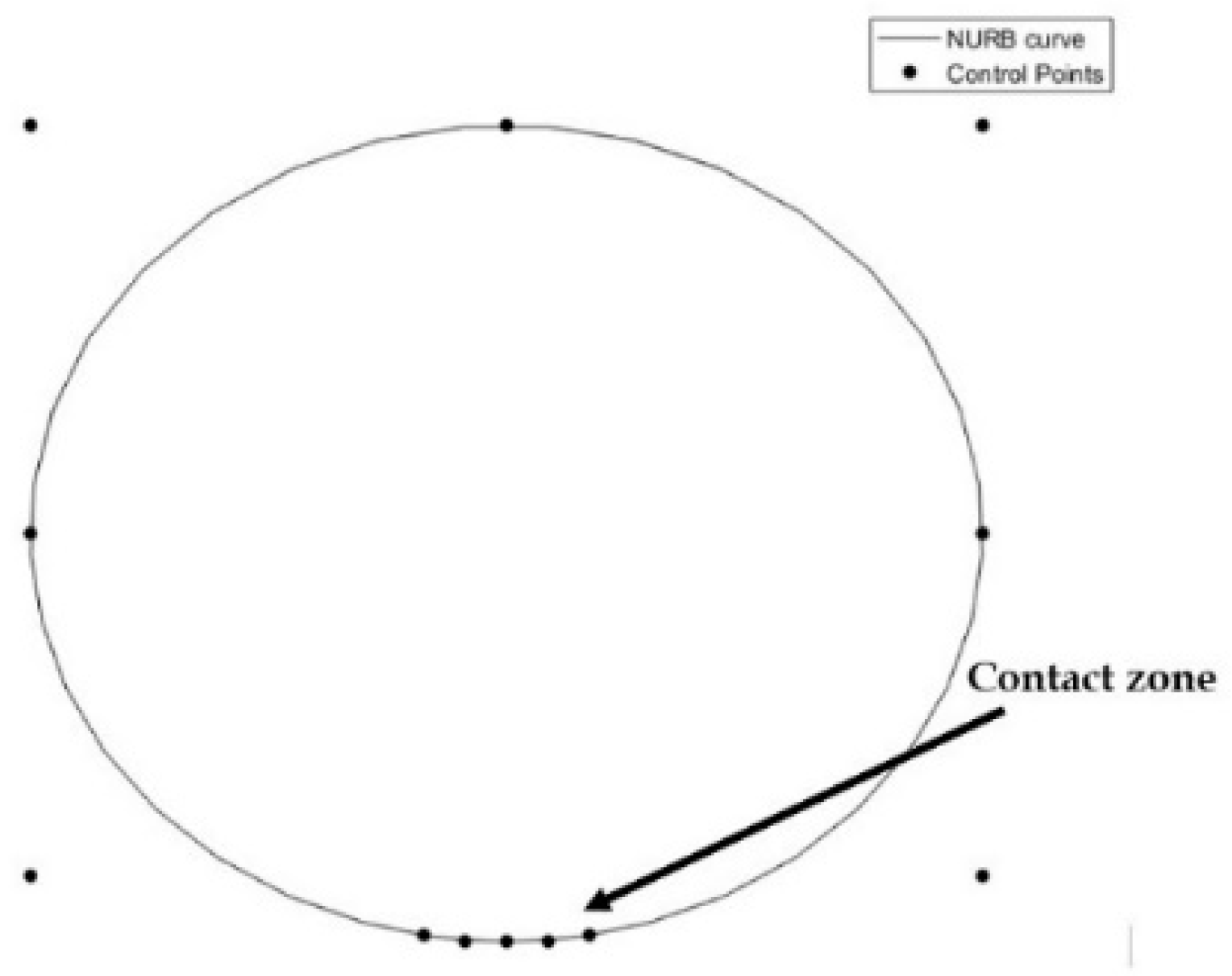
The applications of the IGA-BEM in a wide variety of problems have given good results. Nevertheless, the solution depends on calculating the kernels at the interpolation points, restricting the solution domain to the geometry discretization domain. In this work, a methodology based on IGA-BEM is proposed. The method models the body boundary using a single continuous NURBS function thus makes the geometry discretization independent of the evaluation points and separates the kernels calculation from the interpolation functions. These properties allow us to modify the boundary to solve problems like the contact between two bodies.
The mechanical contact has been extensively studied. Johnson [
13] described the best-known analytical contact models, such as the Hertz model, the JKR model, and the Bradley model, among others. The Hertz model relates the contact area and the material properties; the JKR model uses the same assumption but adds the interfacial interaction strength; and, finally, the Bradley model considers the external Van der Waals interactions that add load to the contact.
In the numerical methods used in continuum mechanics, the most popular algorithm to analyze the contact is the master–slave. This method consists in projecting the nodes of an elastic body (slave) onto a rigid body (master) when a force is applied. If the slave-node penetrates the body of the master, a force is used in the contact area to return the slave-node to the outer surface of the master. Thereby, the deformation of two bodies in contact is found. This algorithm has been widely used with FEM [
14,
15,
16] and has recently been combined with IGA [
17,
18,
19,
20,
21,
22,
23,
24]. Nevertheless, the main disadvantage of this method is that applied contact force is not a real force. Additionally, every time this force is used, the contact zone must be found again and verified for penetration. In case penetration is found, another force must be applied, so the algorithm iterates until there is no penetration.
When using BEM, the problem is solved differently [
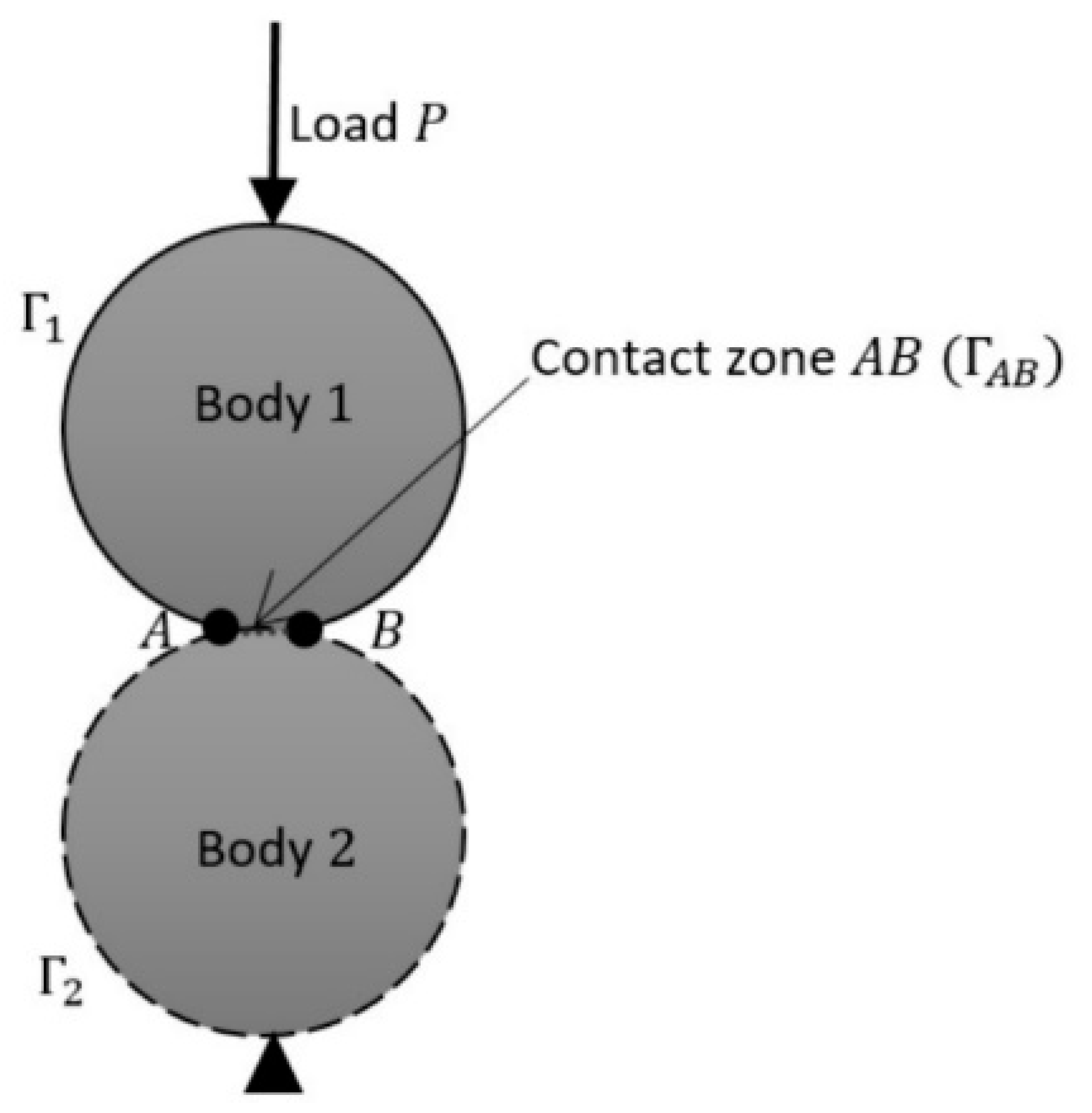
25]. The nodes that are in the contact zone must satisfy two general conditions: there must be continuity between their displacements (not overlapping), and their tractions must be the same but in the opposite direction [
25,
26,
27,
28]. As the contact area is not known in advance, the analysis starts with a first contact zone, which is modified until the nodes satisfy the contact conditions. Although the contact is more easily modeled with BEM than with FEM, the analysis draws the disadvantages of BEM, such as the sensitivity to the analysis-points selection that leads to errors in the numerical calculation of the integrals.
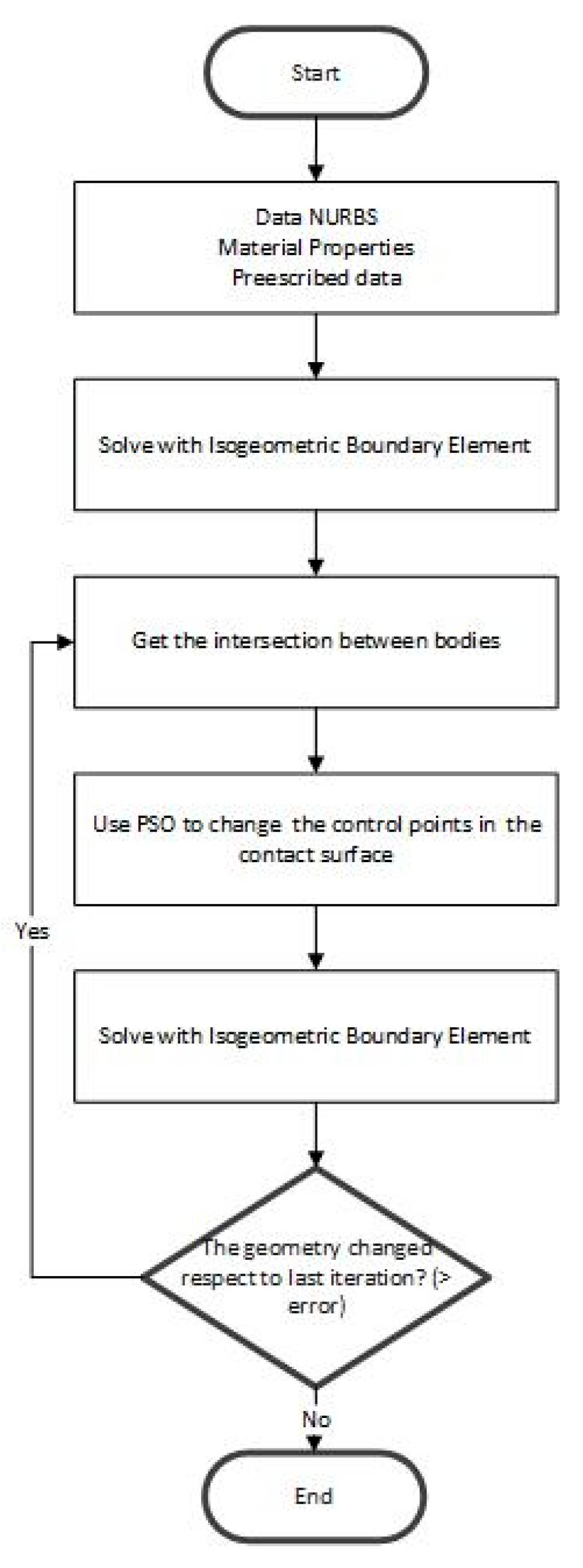
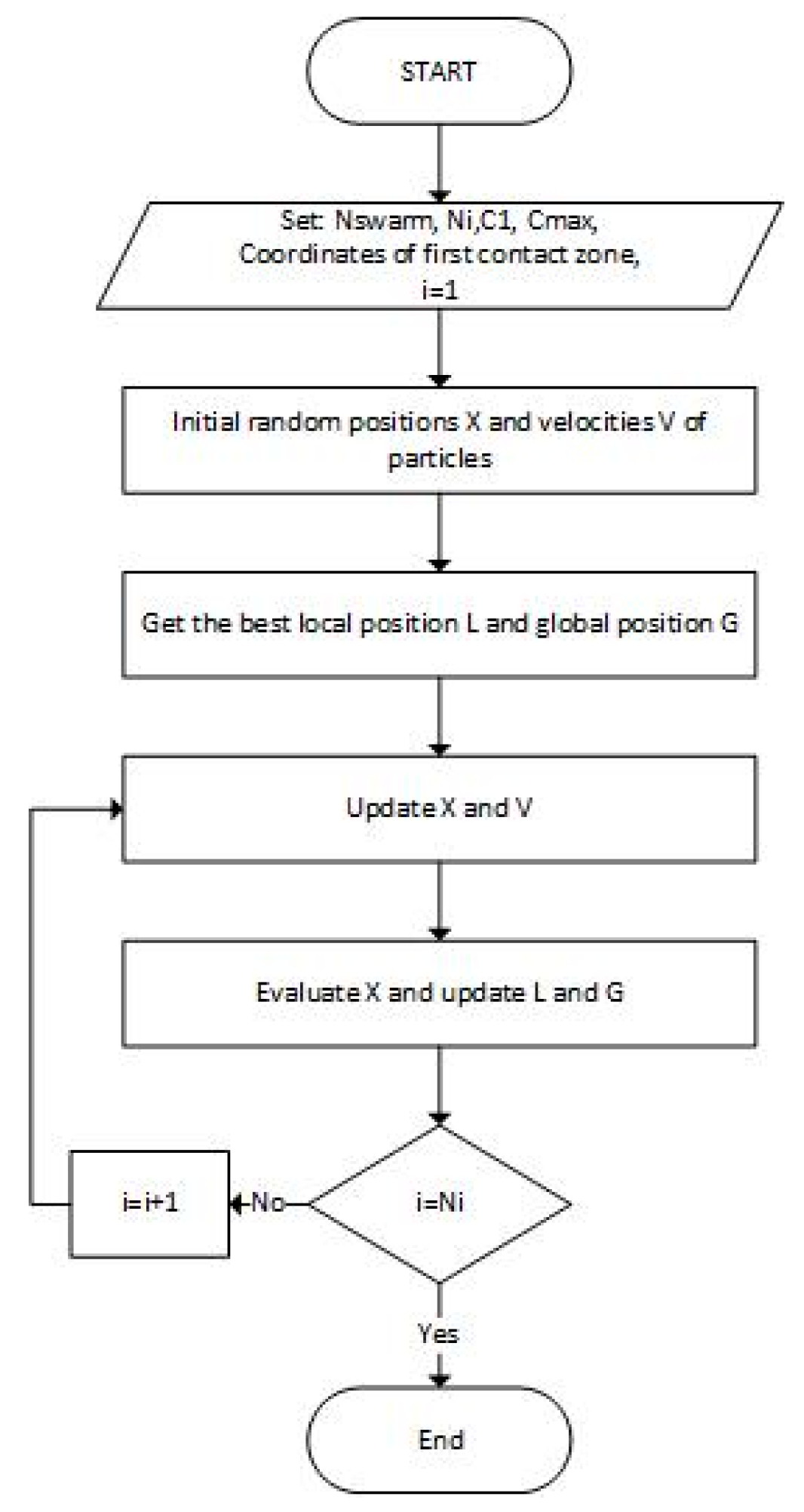
This investigation takes the best features of IGA and BEM to overcome the inconveniences of the conventional BEM. The analysis points of the geometry are separated from the bodies in contact, and the particle swarm optimization (PSO) algorithm is used to find the contact area. In this way, the control points of the NURBS are modified repeatedly, until a correct area is found. With the proposed method, the solution domain is closed (not discrete), by defining the boundary with a single NURBS, and with fewer analysis points in contrast to traditional FEM.
This paper is arranged as follows:
Section 2 presents the basis to understand the isogeometric boundary element method, such as the NURBS functions and conventional BEM.
Section 3 sets the guidelines to implement the modified IGA-BEM, and later, it details the methodology to be implemented in conjunction with the optimization algorithm. The following section presents the results and properties of the analyzed bodies, as well as a comparison with FEM and BEM. Finally,
Section 5 concludes the work and defines future work with the theory presented.
5. Discussion
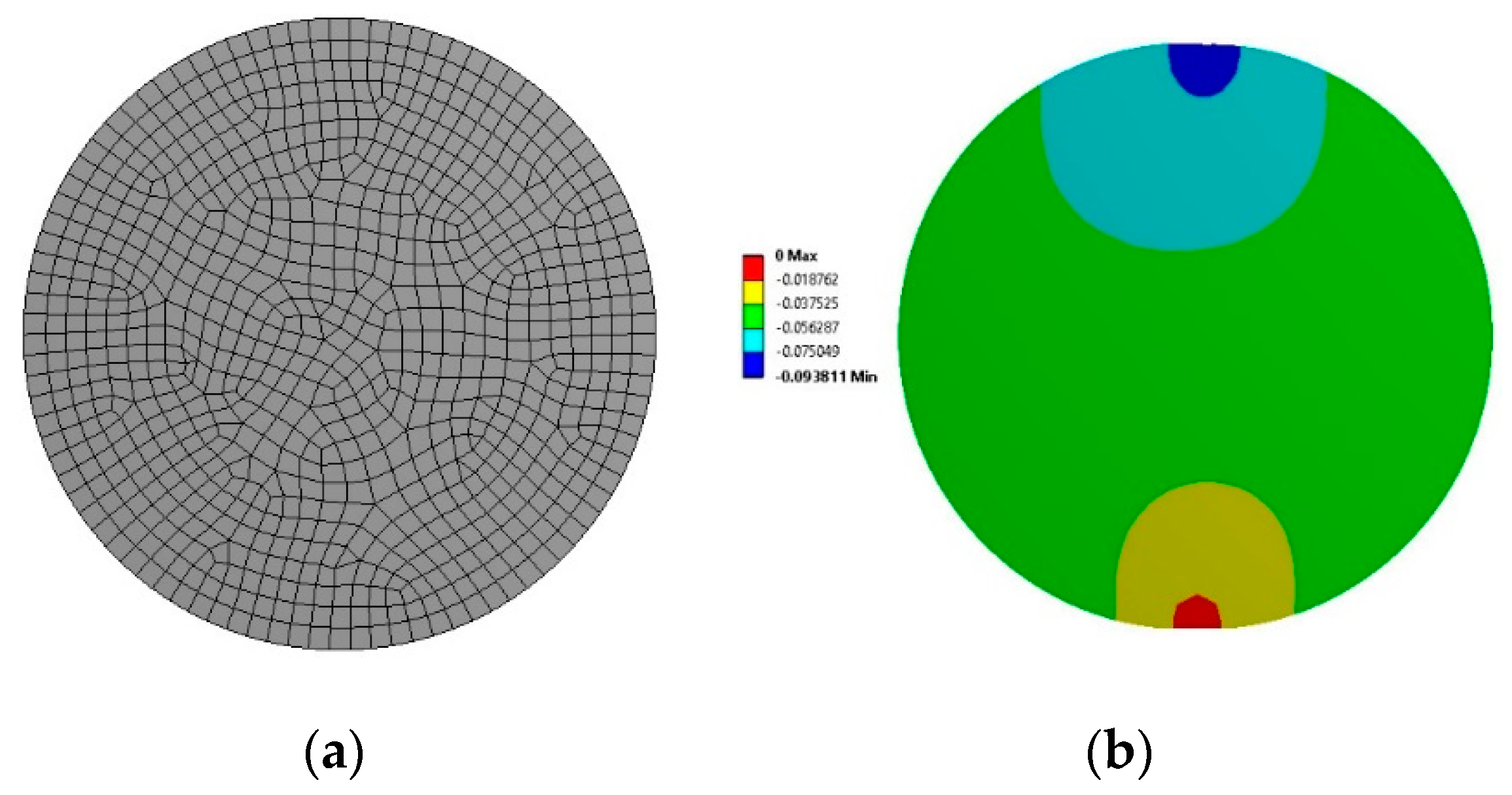
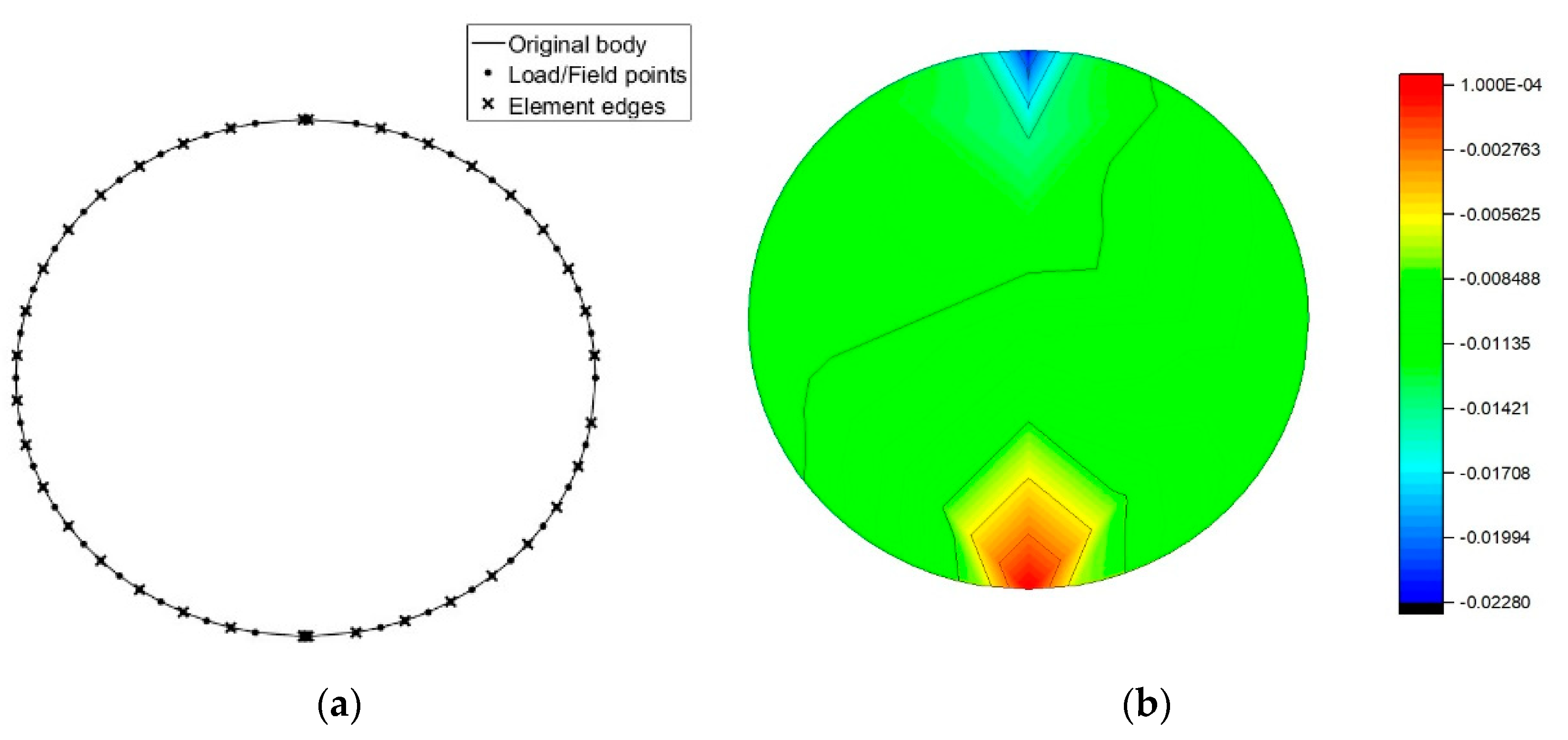
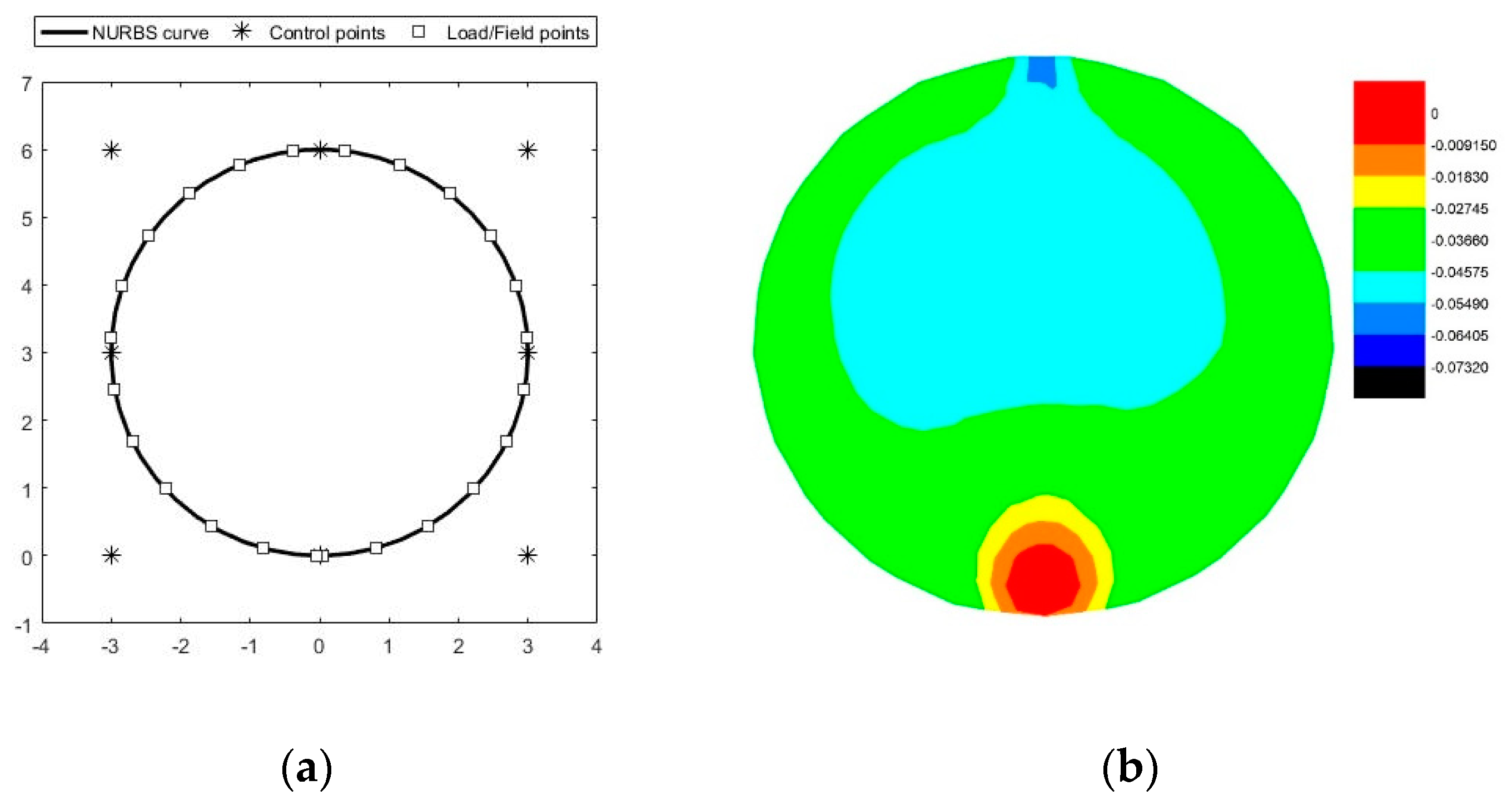
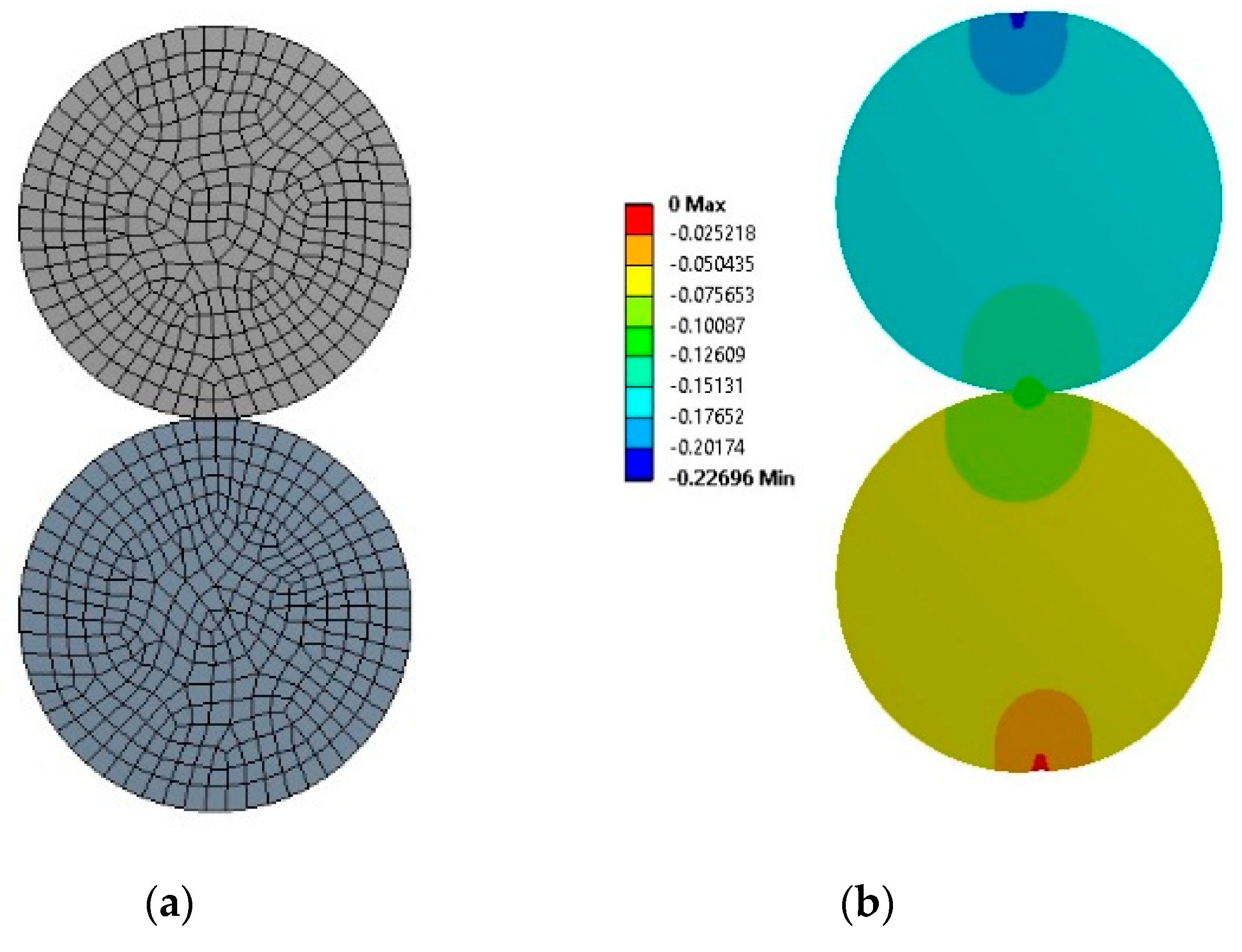
As seen in the previous section, the three methods generated similar deformed bodies when solving the plane strain problem. With a fine mesh, the maximum displacement in the Y-axis with FEM was , while with the conventional BEM, it was , and with the proposed IGA-BEM method, it was . The maximum displacement was seen where the P load was applied. To solve the problem, the FEM software used 2566 nodes or analysis points, while BEM used 71 analysis points, and the proposed IGA-BEM used 24 analysis points. Internal points were added in BEM and proposed IGA-BEM to obtain the internal displacements. In contrast, given the nature of FEM, the analysis did not require adding additional points.
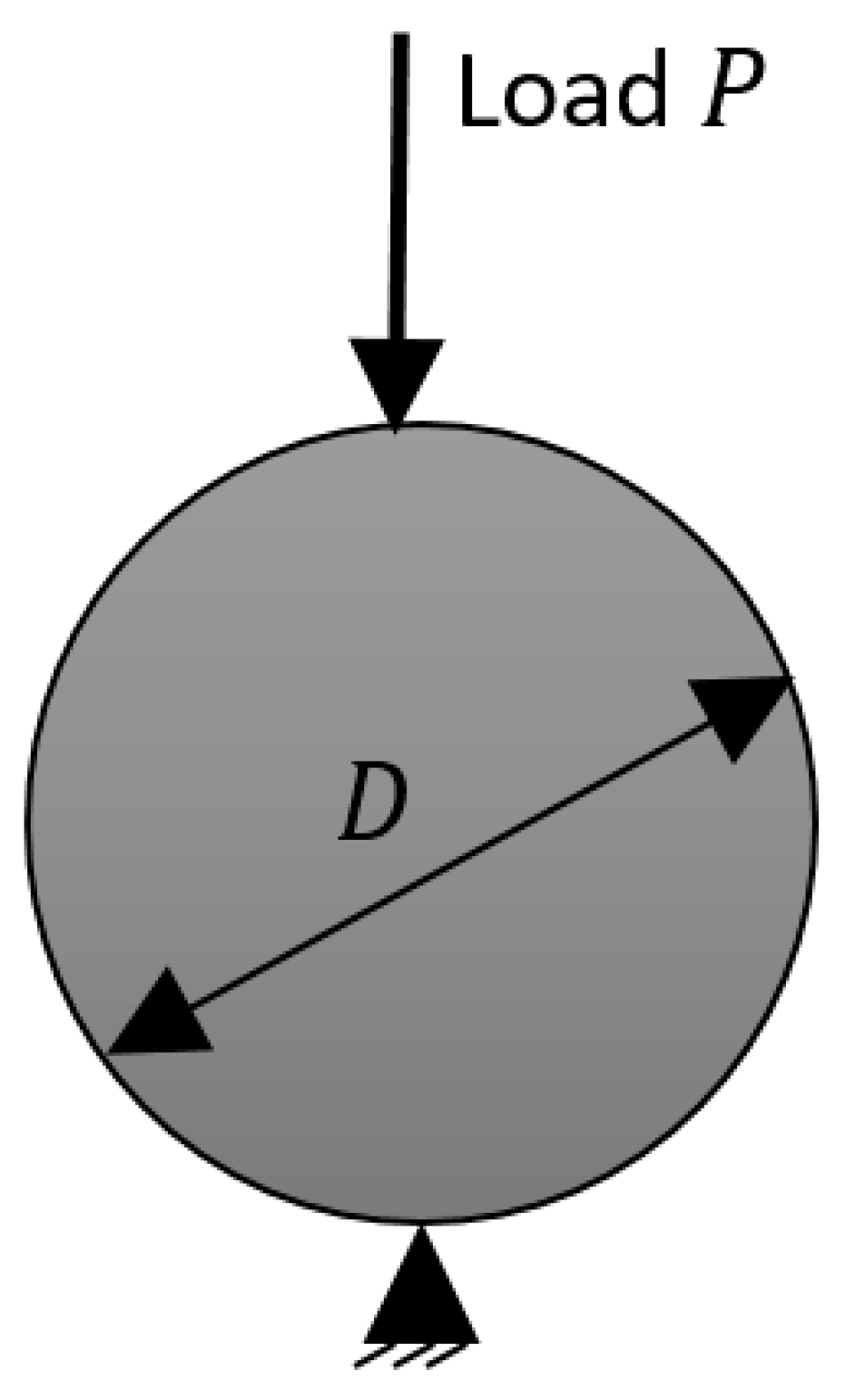
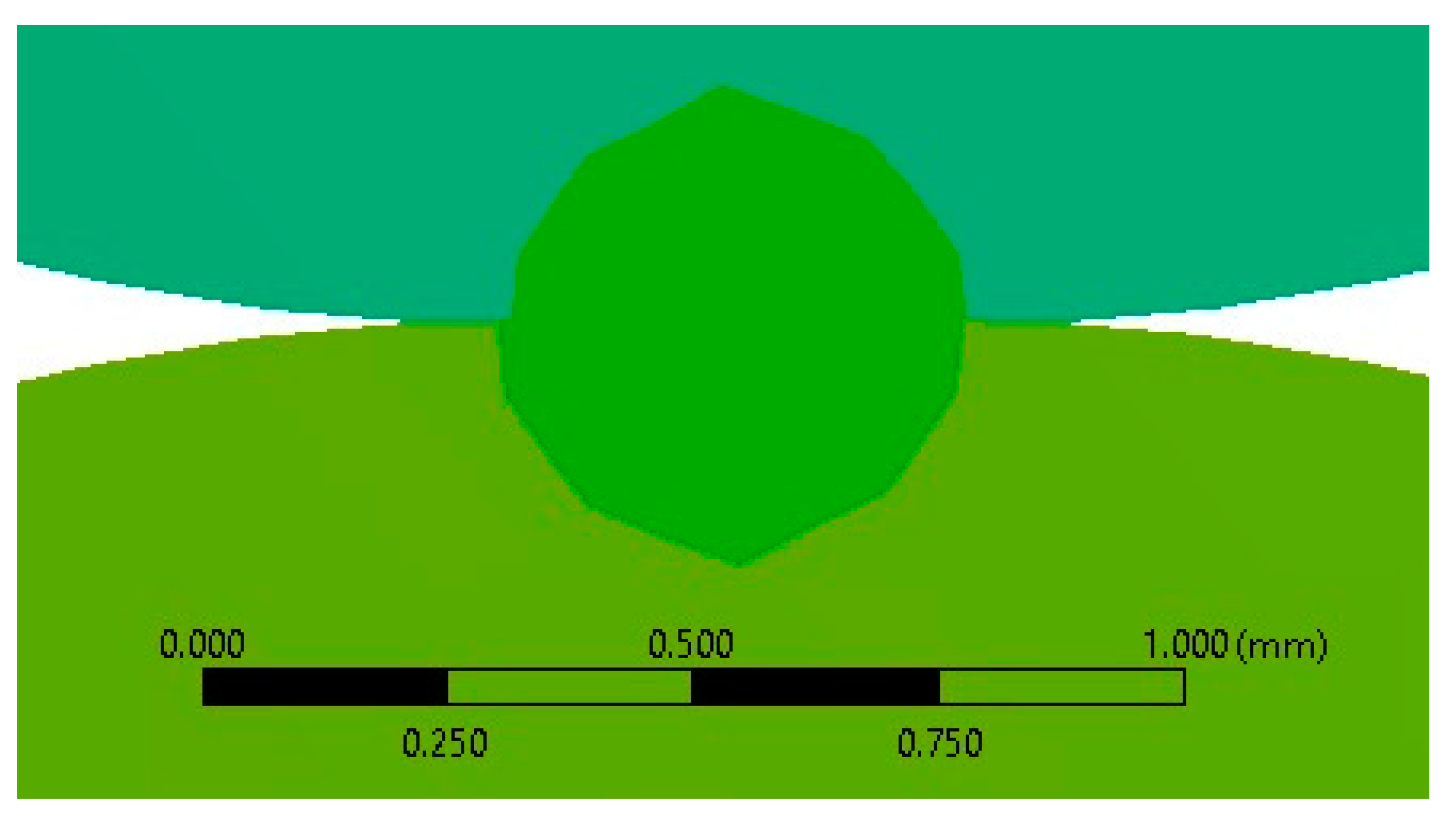
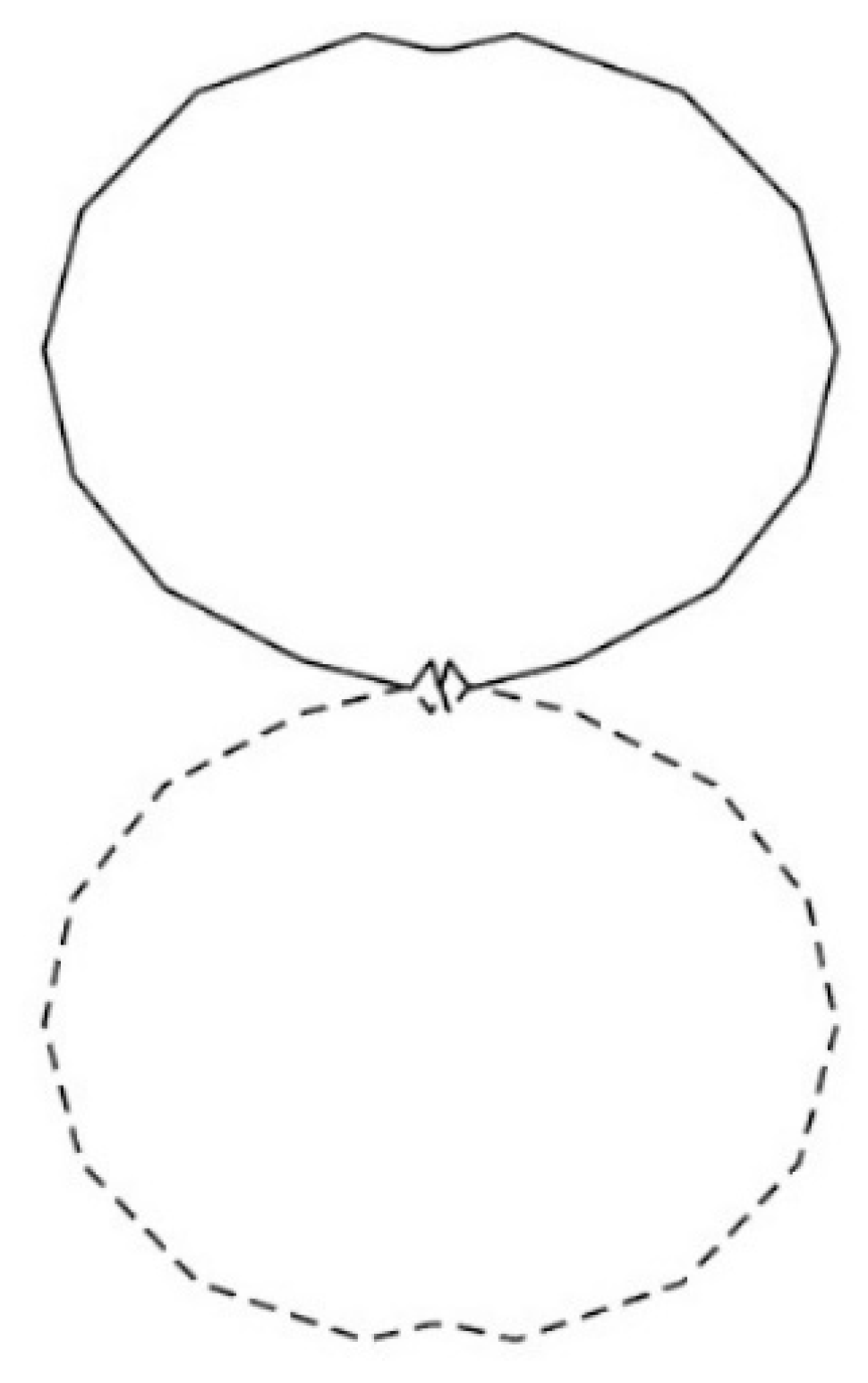
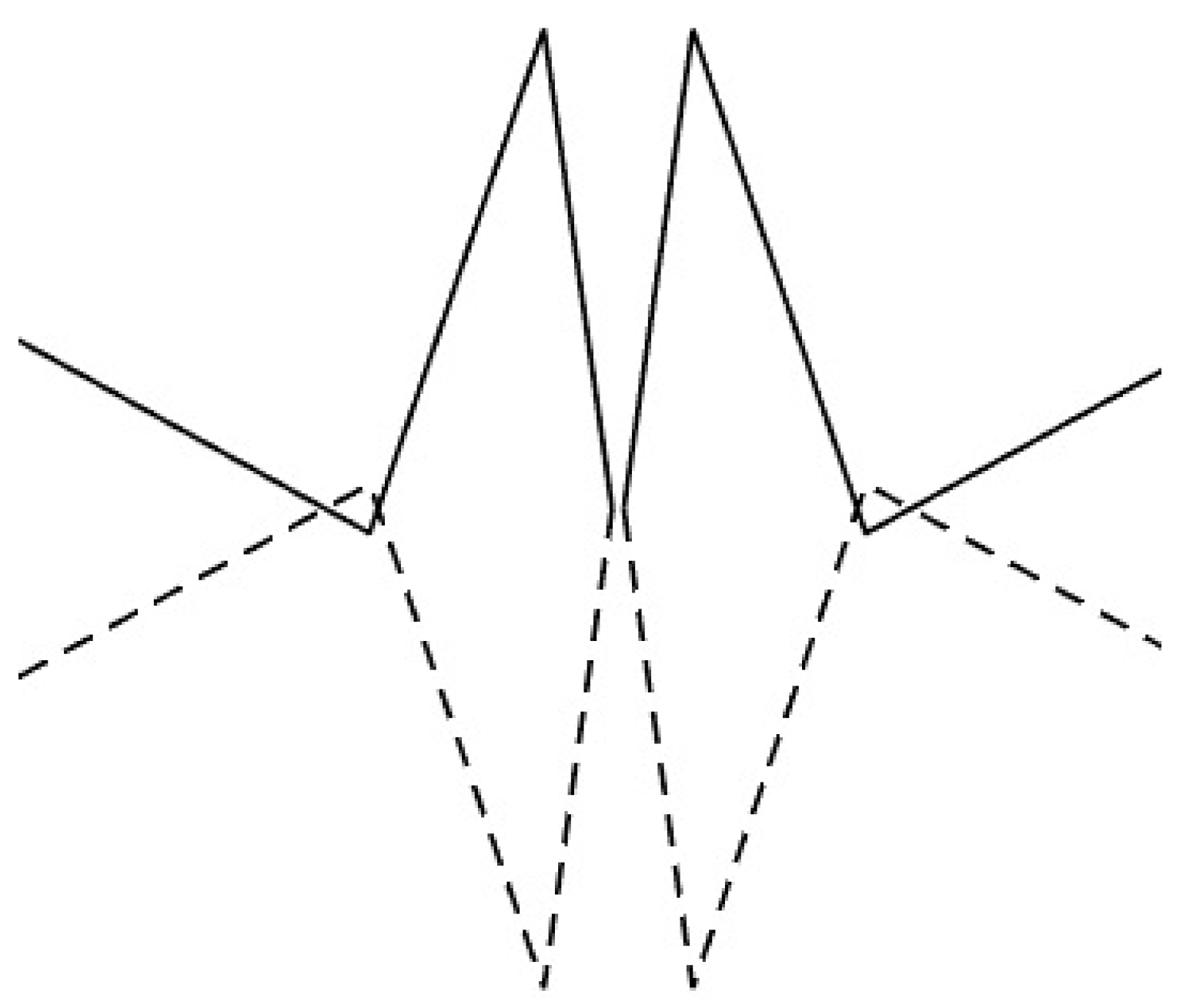
Regarding the contact problem,
Table 9 shows a comparison of the contact area widths obtained with the Hertz model, the FEM software, and the proposed IGA-BEM of contact. Taking the analytical solution as a reference, the error obtained with FEM was 16%, while the proposed method was 10%. In both cases, interference between the bodies was eliminated after applying the load. With FEM, the problem was solved by using a total of 2184 nodes, equivalent to 4368 Degrees of Freedom (DOF). With the proposed IGA-BEM, the problem was solved using 24 analysis points (48 DOF), but the control points that define the bodies’ shape increased 9–13. On the other hand, the deformed figure was obtained after the PSO algorithm converged in a value gap.
Although the proposed method solves the problems with fewer degrees of freedom compared to FEM, it requires more robustness to avoid sensitivity problems in the calculation of and ; The same issue was also observed with the conventional BEM.
6. Conclusions
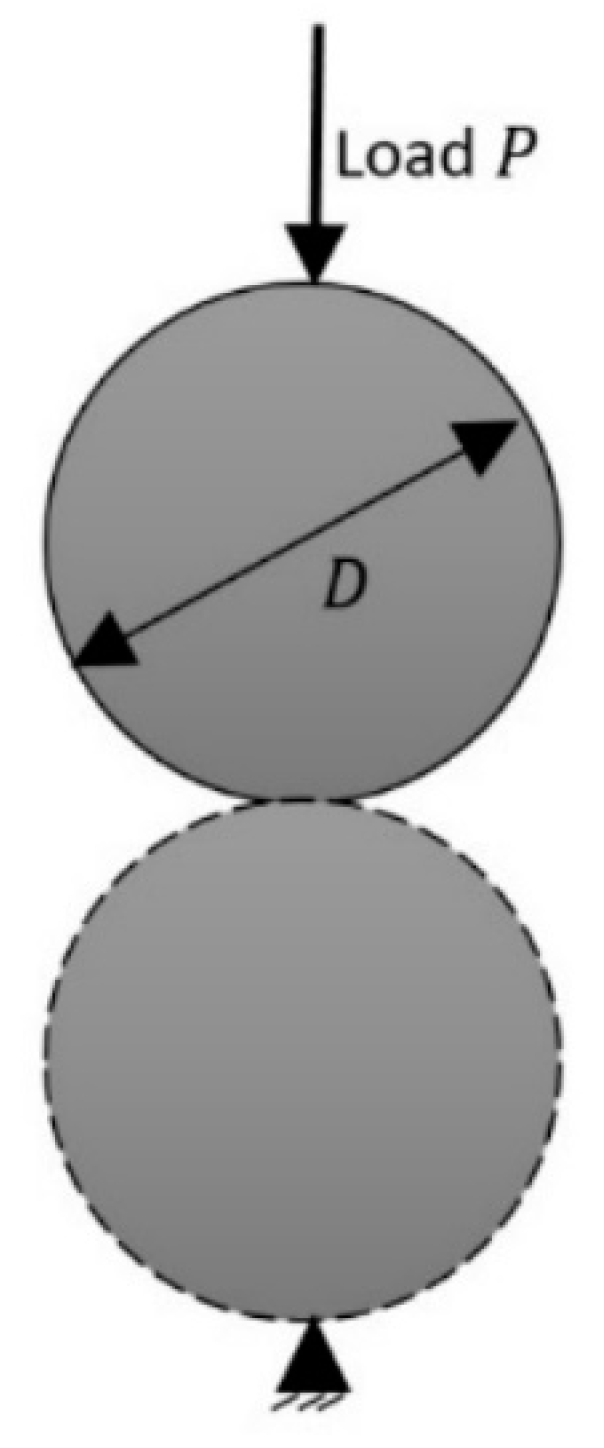
The proposed IGA-BEM got consistent results, while solving the problem of
Figure 8, compared to those obtained from the proven methods FEM and BEM. Although the displacement values were different, the deformation generated was similar in all three methods. However, fewer degrees of freedom were required in proposed IGA-BEM, because a single NURBS was used to model the completed body. Moreover, the load/field points used in the conventional BEM were separated from the points, to represent the geometry.
Regarding the nonlinear contact problem, the contact-zone widths obtained with FEM and with the proposed contact method varied 16% and 10%, respectively, compared to the one obtained analytically, with the Hertz method. Nevertheless, the DOF used by FEM to solve the contact problem were 4368, while the proposed method only used 48 DOF.
Decreasing degrees of freedom is very significant, for example, when solving multiphysics problems, where it is required to invert matrices. Furthermore, as seen in [
32], the propagation error is tied to the size of the matrix: The more elements the matrix has, the higher the error.
Although the results are promising, future work is required to prove that the methodology is valid in other situations where displacements are not symmetrical or additional factors, such as friction, are considered.

 ,
, 


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}