2.1. Spray System
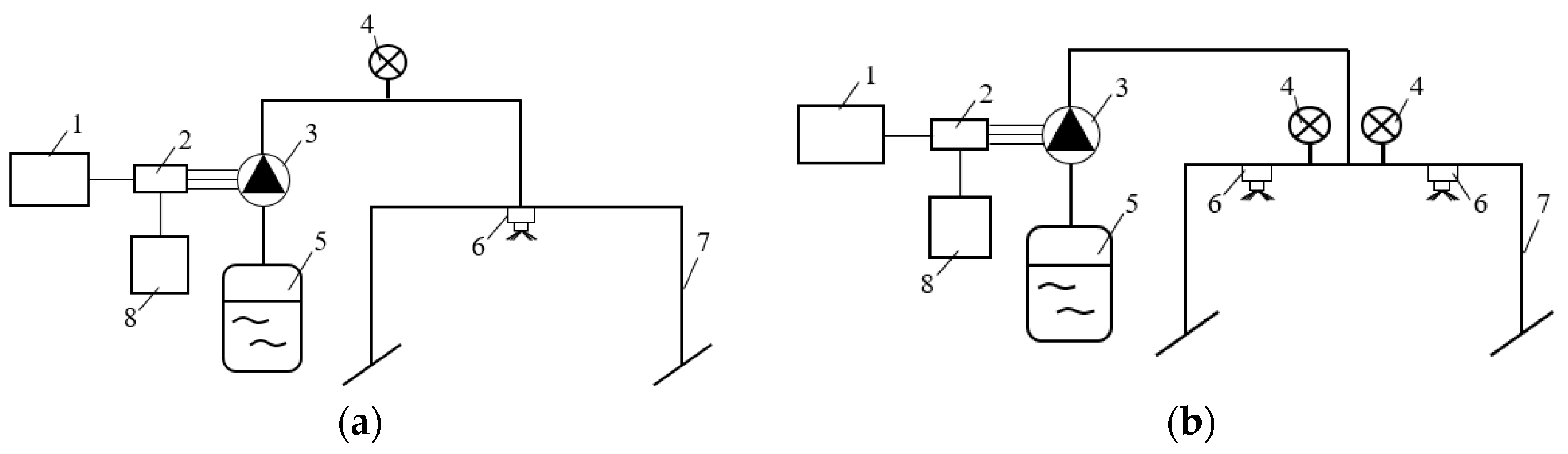
Two spray systems for the experiment were designed as shown in
Figure 1.
Two spraying systems consisted of the spray part and the electronic part. The spray part was made up of a three-phase back-flow diaphragm with brushless water pump (Effort tech, Hefei, China, brushless water pump), extended range pressure flat fan-shaped nozzle (TEEJET, USA, XR110015VS), spray tank (10 L), pressure gauge (Chenyi Instrument, Shanghai, China, Shockproof pressure gauge) and support frame. Arduino (Arduino UNO R3), electronic speed control (15 A, 3 S), and battery (12 V, 3 S) formed the electronic part.
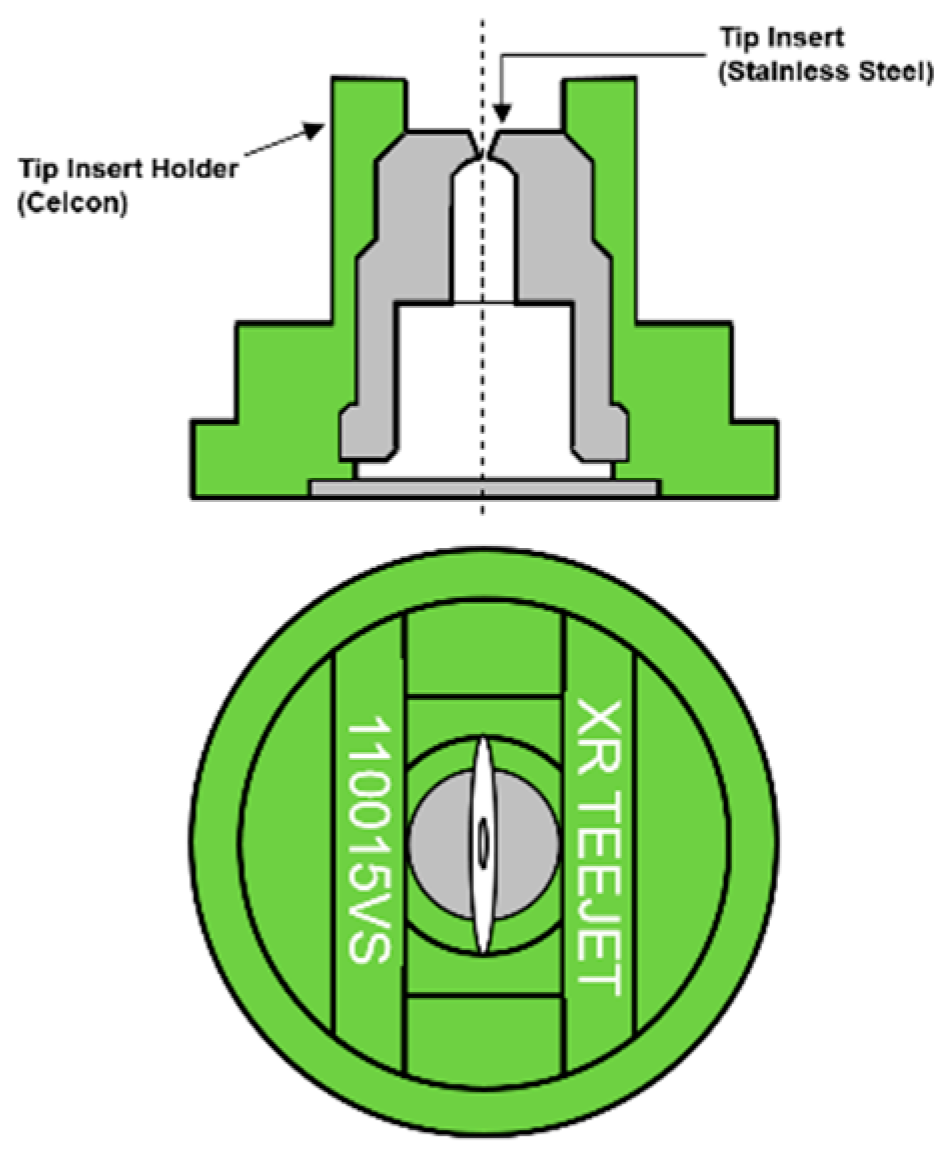
The pressure range of the water pump was 0–0.48 MPa, which can definitely meet the needs of this experiment (0.2 MPa) and easily controlled by the electronic part. The nozzle selected in this experiment (TEEJET XR110015VS) was most commonly used in UAV spraying, it had excellent spray distribution over a wide range of pressures. As shown in
Figure 2, The nozzle was mainly composed of the tip insert and tip insert holder. The nozzle could achieve fan-shaped mist spray with a 110° spray angle; it had well spray coverage in high pressure and could be used to reduce the drift in low pressure. A pressure gauge was used to determine that the pressure of spray system was at the set value (0.2 MPa) through experiment. The function of the support frame was to change the spray height of nozzles from 1 m to 2 m and supporting the whole system.
Arduino can provide pulse width modulation (PWM) signal from Pin3 for the experiment with stable and reliable performance when the experiment was operated in two different settings. The Timer2 function of Arduino was used to set the PWM signal and defined the output pin. Electronic speed control could receive the PWM signal from the Arduino and controlled the voltage of the brushless pump, providing 5 V power for Arduino. Battery supplied the required voltage (12 V) needed for these two systems.
2.2. Equipment and Data Collection Methods
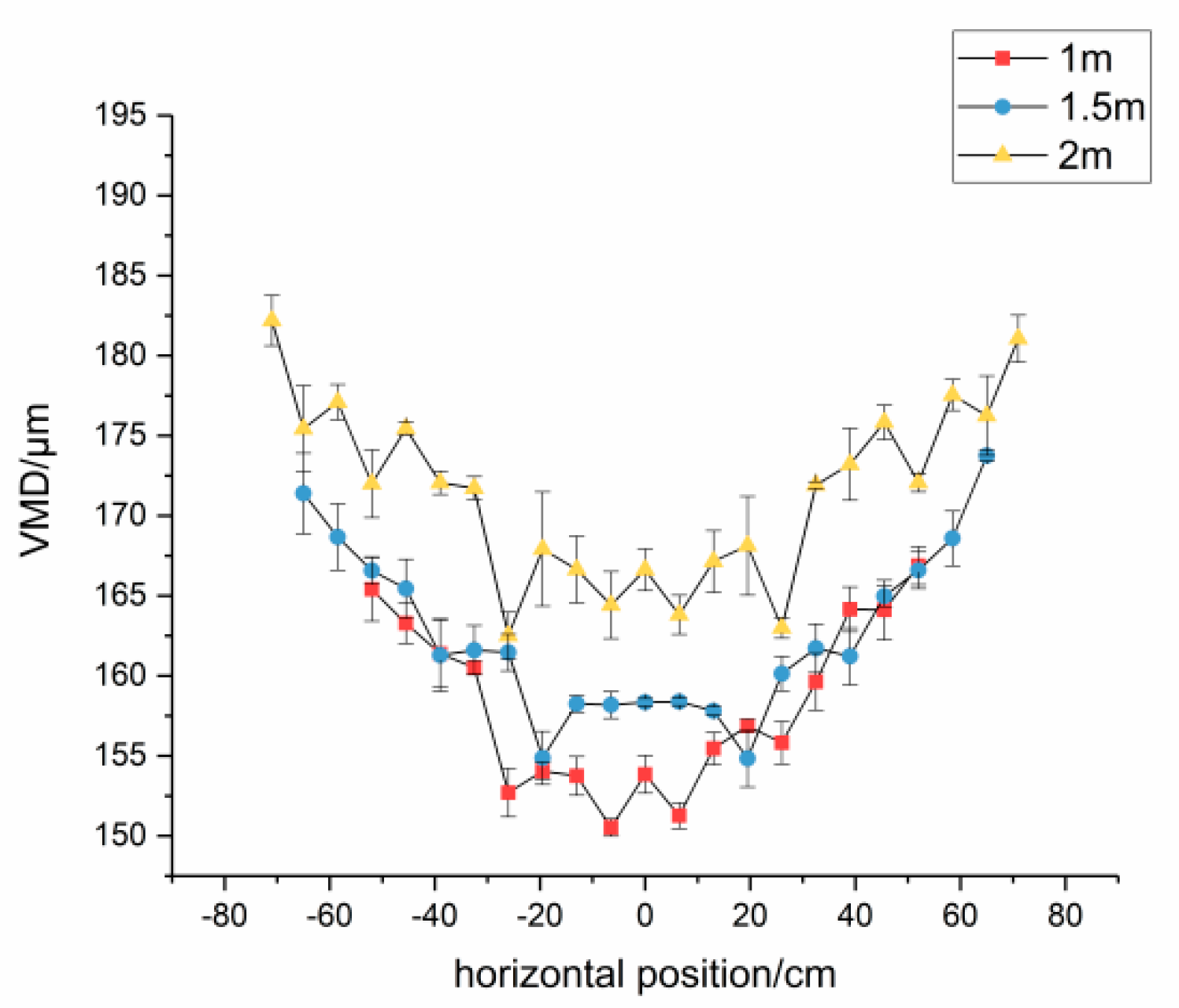
The particle size of the droplets produced by the nozzle and the deposition distribution were two main parameters in this study, the water was used instead of pesticide. The experiment was conducted under the pressure of 0.2 MPa with the environmental temperature at 25 ± 2 °C and the relative humidity of 55 ± 5%. Spray particle size analyzer (NKT Analysis Instrument, Shandong, China, PW180-B) was used to measure the droplet size, the measurement range was 1–1000 µm and the repeatability error was kept within 1%. According to the commonly used UAV spraying flight attitude, spray heights were set to 1 m, 1.5 m, and 2 m.
As shown in
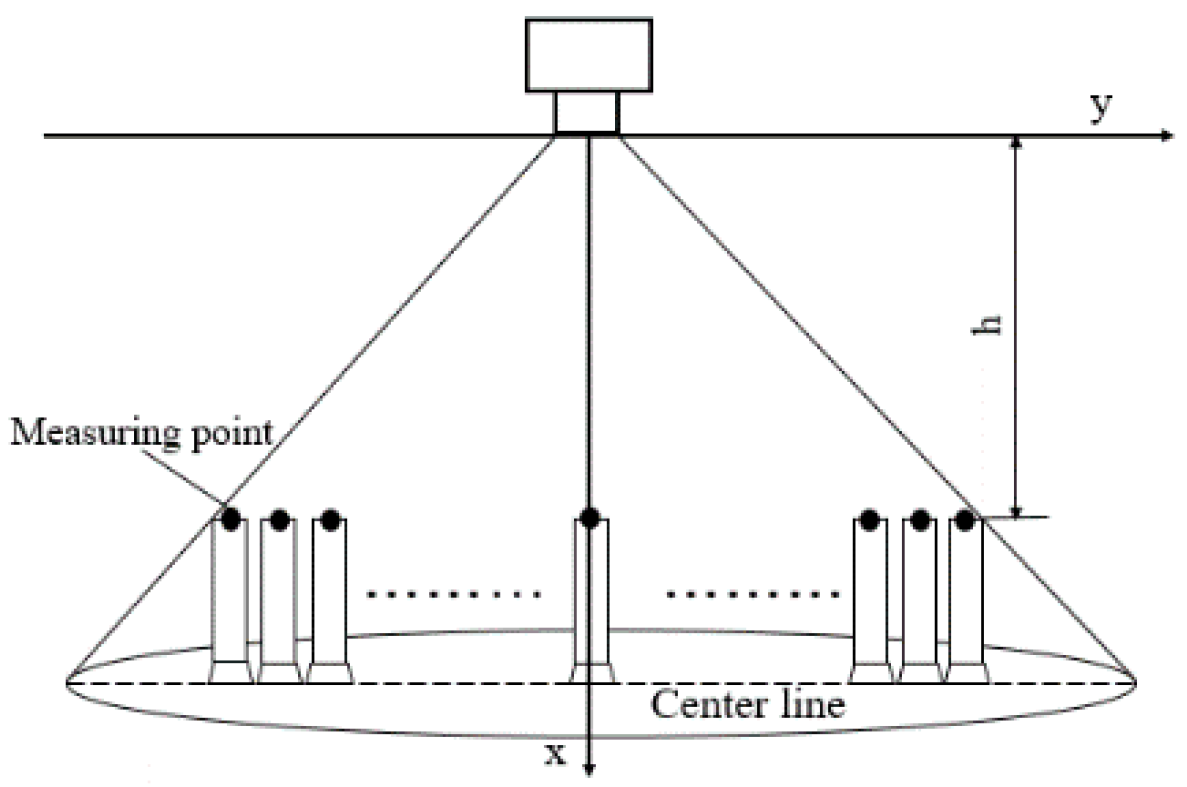
Figure 3, the deposition was measured by several 100mL measuring cylinders, the center of the upper surface of each measuring cylinder was the position of each measuring point. The experiment put measuring cylinders along the centerline, the time for collecting was 5 min, and the collection repeated for three times. Since the external diameter of the100 mL measuring cylinder was 65 mm (the distance between the centers of two adjacent measuring cylinders is the same as the value of external diameter), we set the distance between each measuring point at the same spray height as 65 mm. the inner diameter of measuring cylinder was 27 mm, and we can get the area of spray for each measuring cylinder, the conversion formula of measured volume and deposition was obtained as follows:
where
is the deposition (mL/cm
2),
V is the measured volume (mL),
d is the inner diameter of the measuring cylinder (cm).
The droplet size was measured by passing the laser of particle size analyzer through the measuring point accordingly, and vertically, each experiment collected 60 data of the same measuring point as a group and every test repeated for three times, 60 data were averaged as one measuring value for one measuring point.
The 50% effective deposition determination method was used to determine the spray span of TEEJET XR110015VS nozzle [
32]. According to the ASAE standard S341.3, the two-point distance between half of the maximum deposition on both sides was defined as the effective spray span. The deposition was measured in 29 horizontal positions (14 different measuring point on both sizes and one center point) at each height, the measuring cylinders were placed along the center line just as shown in
Figure 3, every test was repeated for three times. After this experiment, the spray spans were determined for each height, 1040 mm for 1 m, 1300 mm for 1.5 m, and 1430 mm for 2 m accordingly. The spray span showed symmetry along the spray height direction (axis
x).
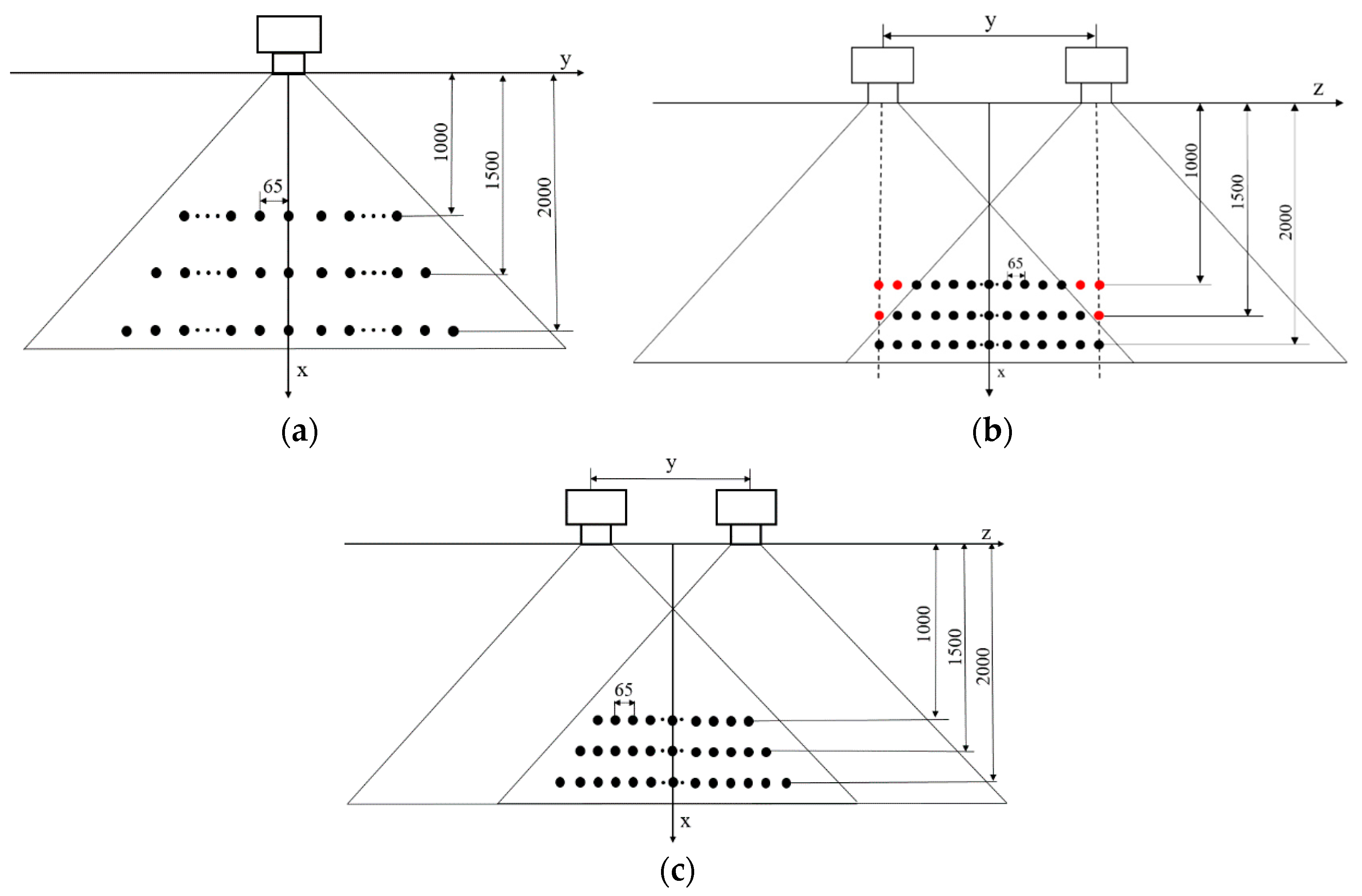
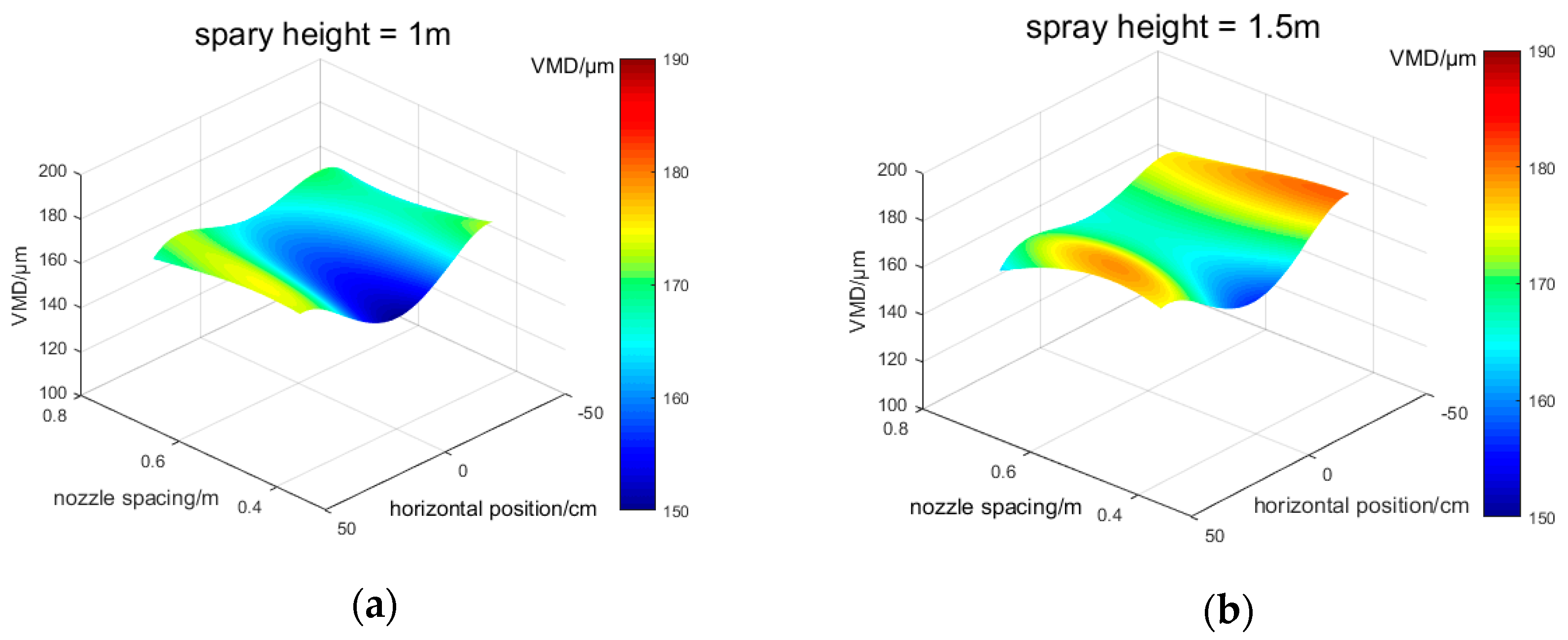
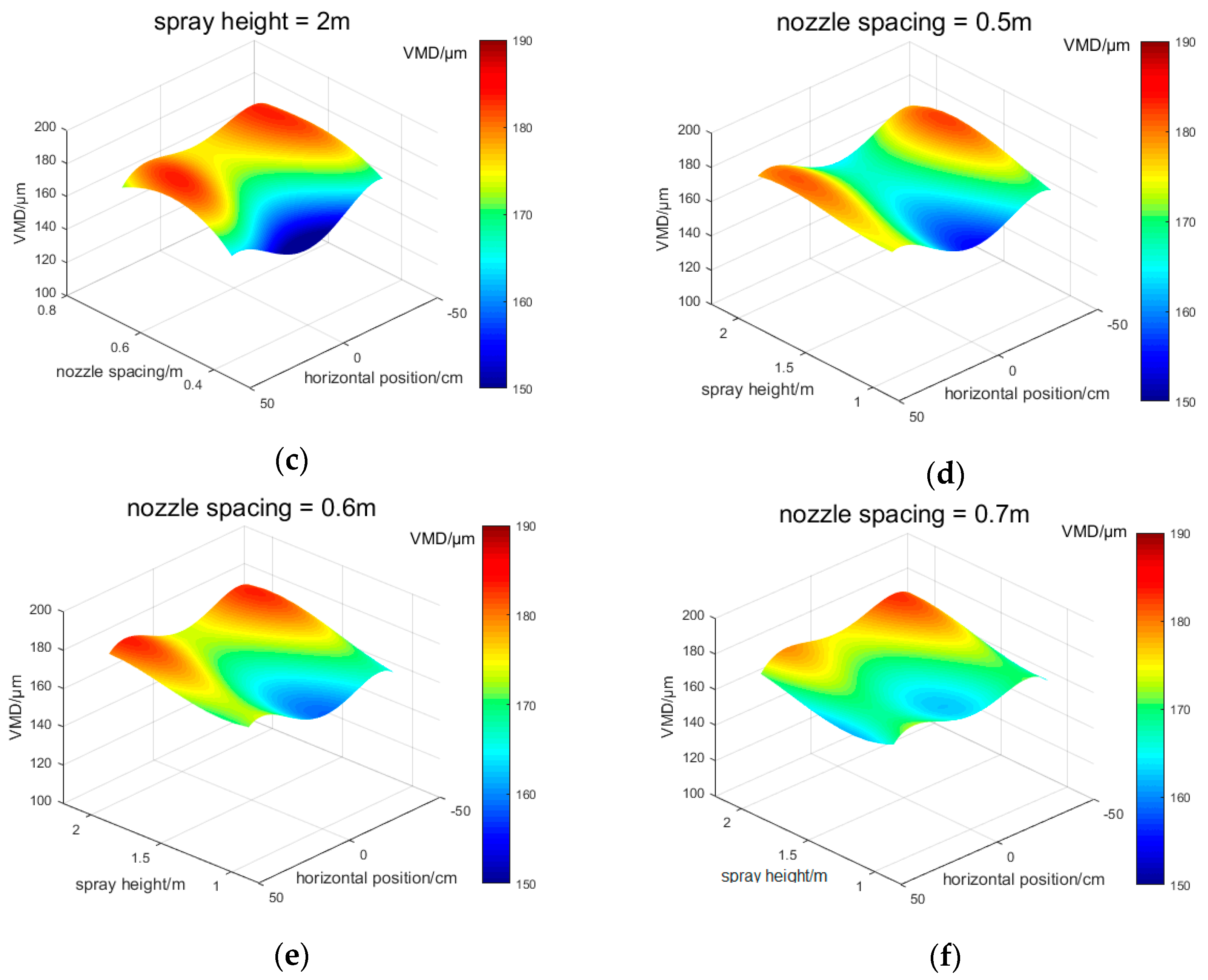
According to preliminary experiment, the spray height remained the sets before (1 m, 1.5 m and 2 m), the measuring points were set along the horizontal line and the interval is 65 mm, the maximum horizontal position were set to ±520 mm, ±650 mm and ±715 mm for each spray height. Additionally, we selected three most commonly used spacing of nozzles in UAV spraying for twin nozzles experiment (0.5 m, 0.6 m, and 0.7 m).
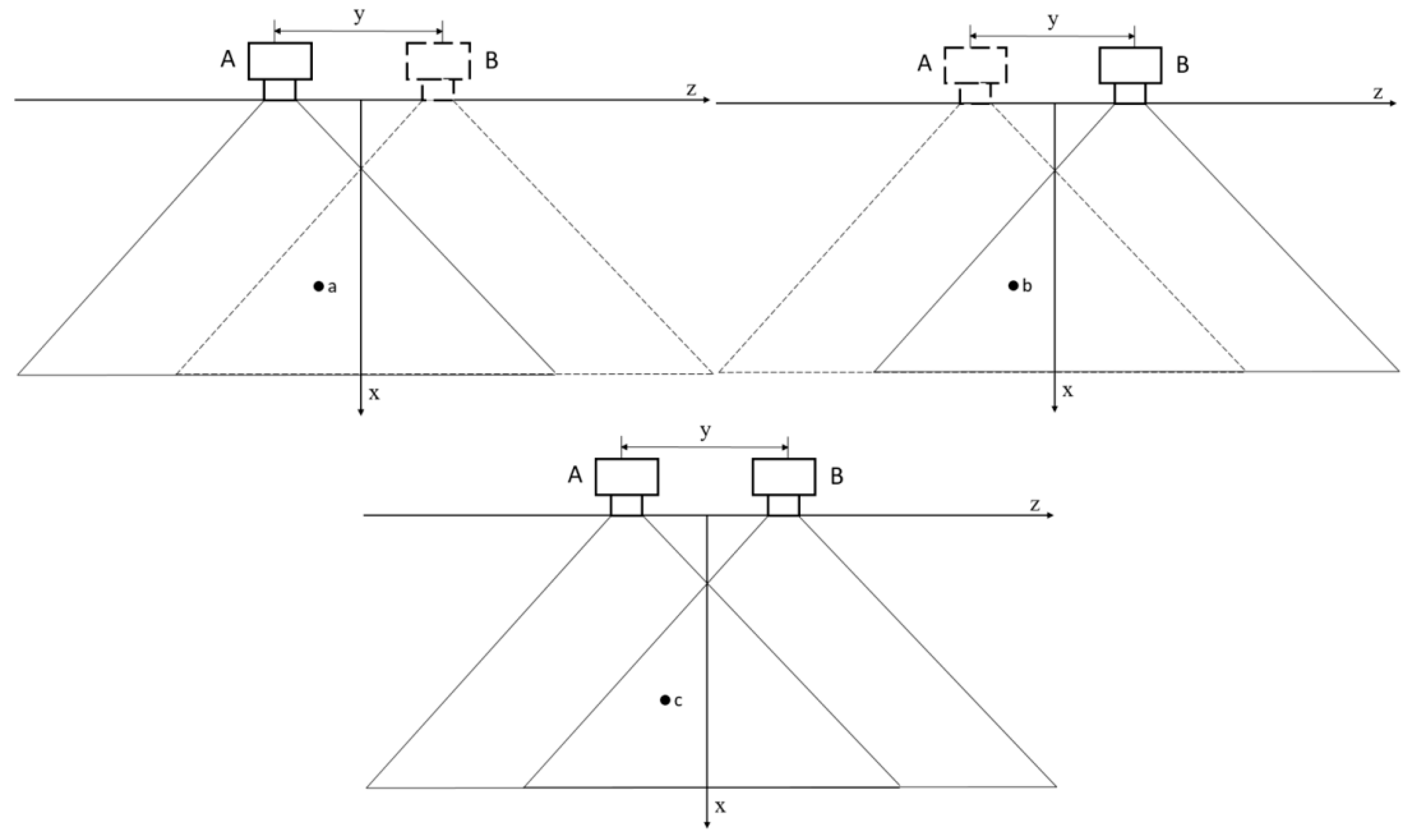
The distribution diagram of measuring points was shown in
Figure 4, the VMD values and deposition values obtained from these measuring points were shown in
Table 1. As shown in
Figure 4a, the first experiment was to measure the droplet size at each measuring point of the single nozzle, the study took the center of the nozzle as the zero point of the
y-axis and collected data of all measuring points within the maximum horizontal position on both sides, group A in
Table 1 represents the VMD values obtained by this experiment. In the second experiment (
Figure 4b), different position and nozzle spacing were tested in the second experiment, and the VMD values and deposition values were obtained, the zero points of
z-axis was at midpoint of the two nozzles, the measuring points were mainly composed of the overlapping area points, points out of the overlapping area and between the vertical lines of two nozzles (red measuring points) were also included, group B and group C in
Table 1 represented the VMD values and deposition values obtained by the second experiment. The measuring points of overlapping area were shown in
Figure 4c, group D in
Table 1 represented the VMD values obtained in this area. Group A, B, C, and D represented the data in
Section 3.1,
Section 3.2,
Section 3.3 and
Section 3.4.
Table 2 shows the result of the mean values, standard deviation, and significant difference for VMD values and deposition values under different spray heights and nozzle spacing. From the saliency analysis, the VMD values in group A showed a significant difference under different spray height. For group B, C and D, the VMD values and deposition values showed significant difference under different nozzle spacing and spray height. On the whole, different experimental conditions in this study can change the droplet size and deposition of the UAV spray nozzle (TEEJET XR110015VS).
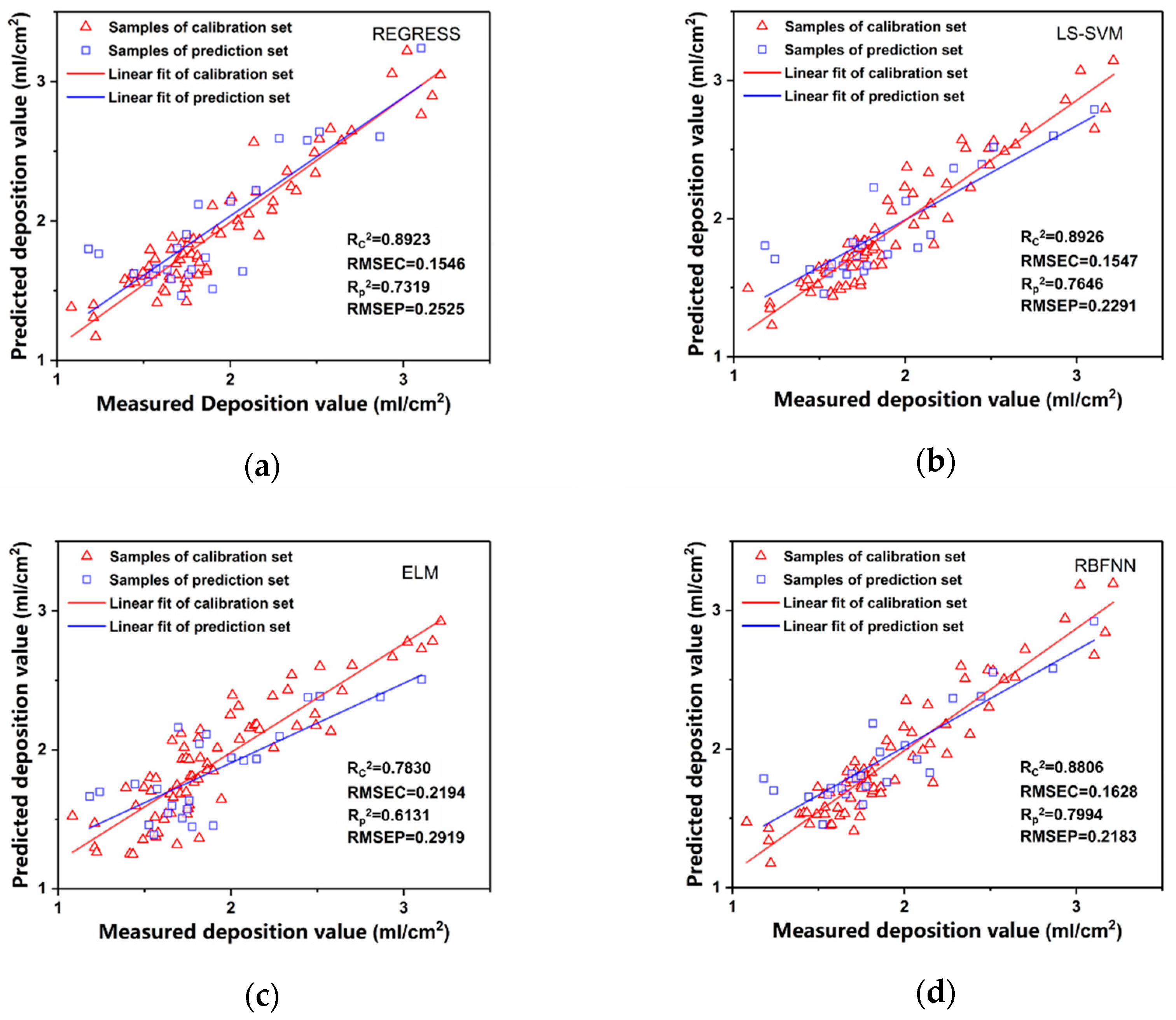
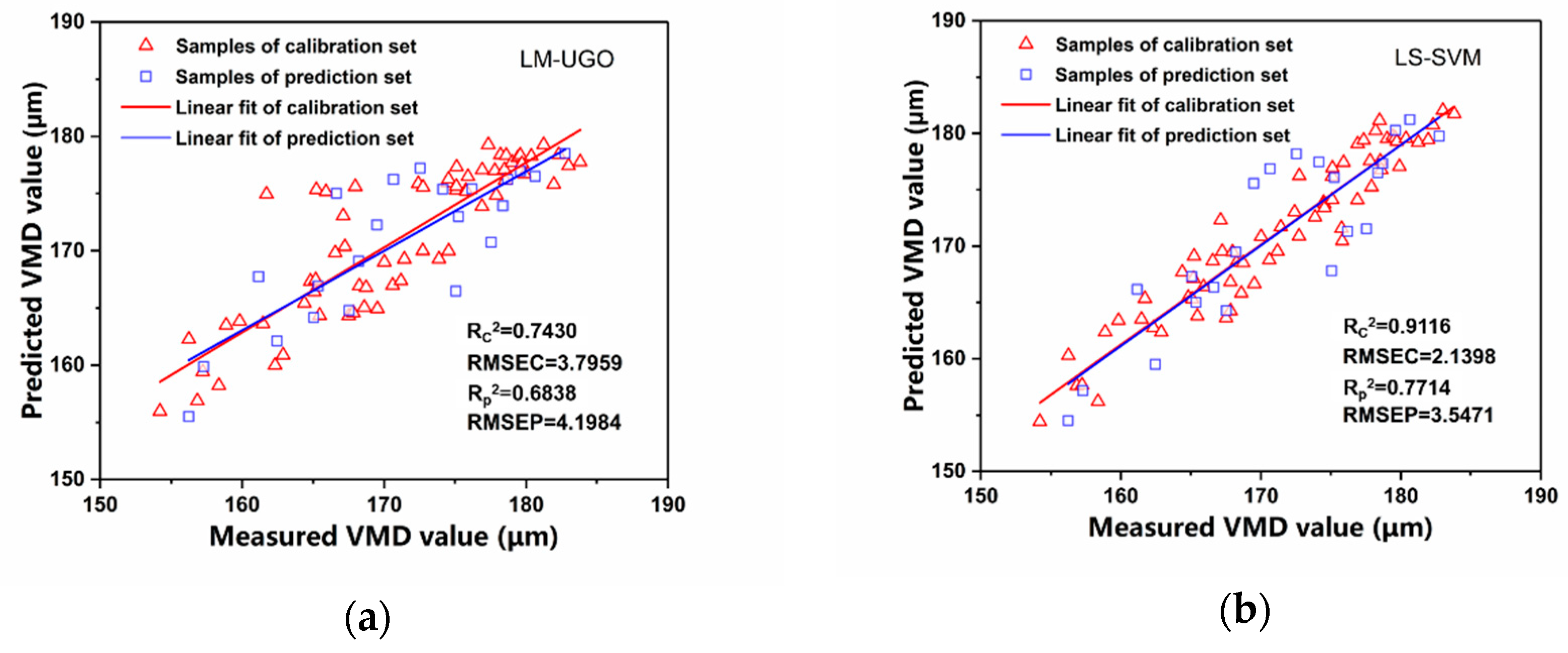
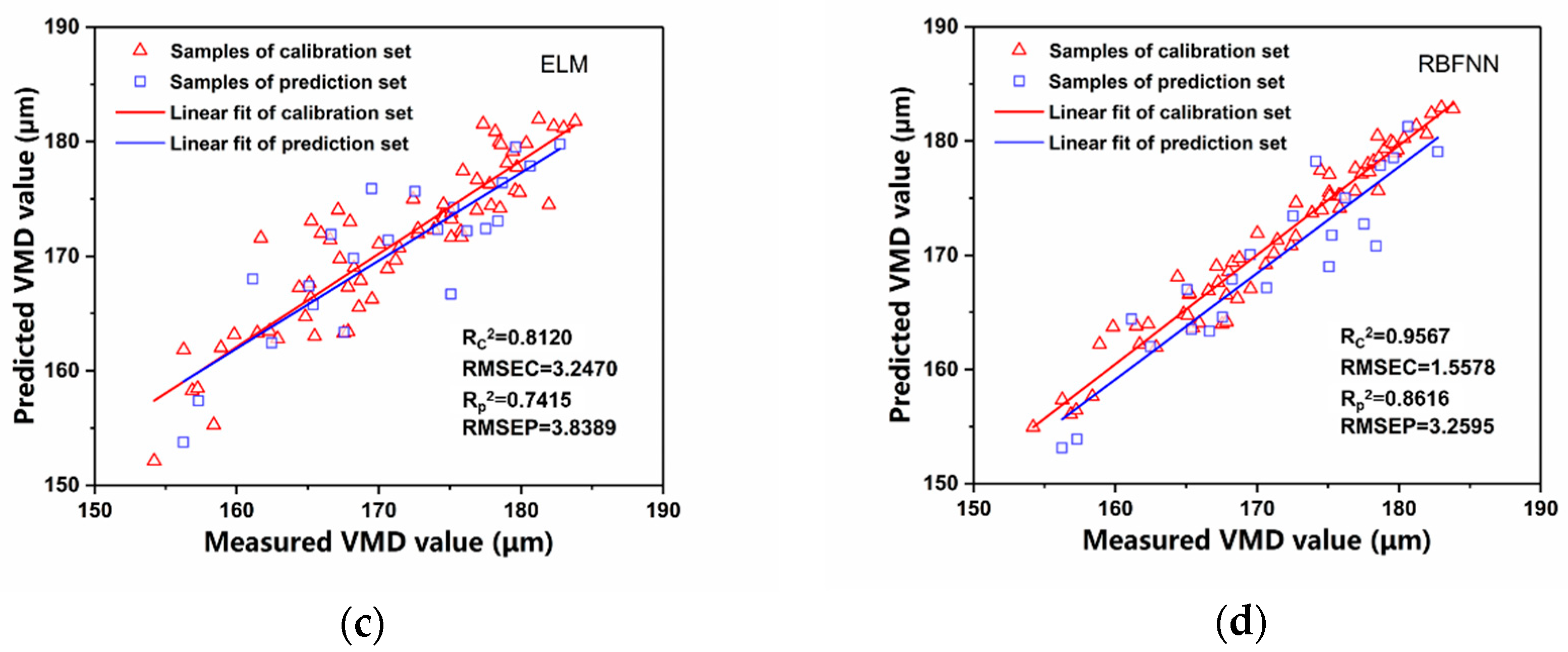
2.3. Machine Learning Methods
Regress function achieved by MATLAB is an orthogonal least squares method for multiple linear regression; it has been applied in the fields of meteorology, economics [
33,
34,
35]. The least-square algorithm is used in the REGRESS function. Furthermore, REGRESS divides the residuals of observed values of y by an estimate of their standard deviation. The obtained values present t-distributions under a certain degree of freedom. The intervals returned in this function are shifts of the confidence intervals of these t-distributions and centered at the residuals [
36]. The F statistic is used to evaluate the significance of the model, the significance level is set to 0.05, and the confidence interval of the coefficient estimation value is set to 95% in this study.
Support vector machine (SVM) is a widely used modeling method, but problems like large workload and long training time occur when this method being used in large size sample. Least squares support vector machines (LS-SVM) can solve these problems with its high efficiency [
37]. It is a support vector machine version that involves equality constraints and works with a least-squares cost function [
38]. LS-SVM regression used in this study is highly related to regularization networks, Gaussian processes, and reproducing kernel Hilbert spaces, emphasizing the primal-dual interpretations of constrained optimization problems [
39]. LS-SVM can solve small-sample, nonlinear, and high-dimensional problems, and the selection of kernel function will affect the final result [
40]. Kernel functions are important in SVM with its ability to transform original data from low dimension space to high dimension space. We used the LS-SVM method and chose the radial basis function (RBF) as the kernel function in this study. The penalty coefficient and bandwidth of the RBF (γ) kernel must be determined for better performance.
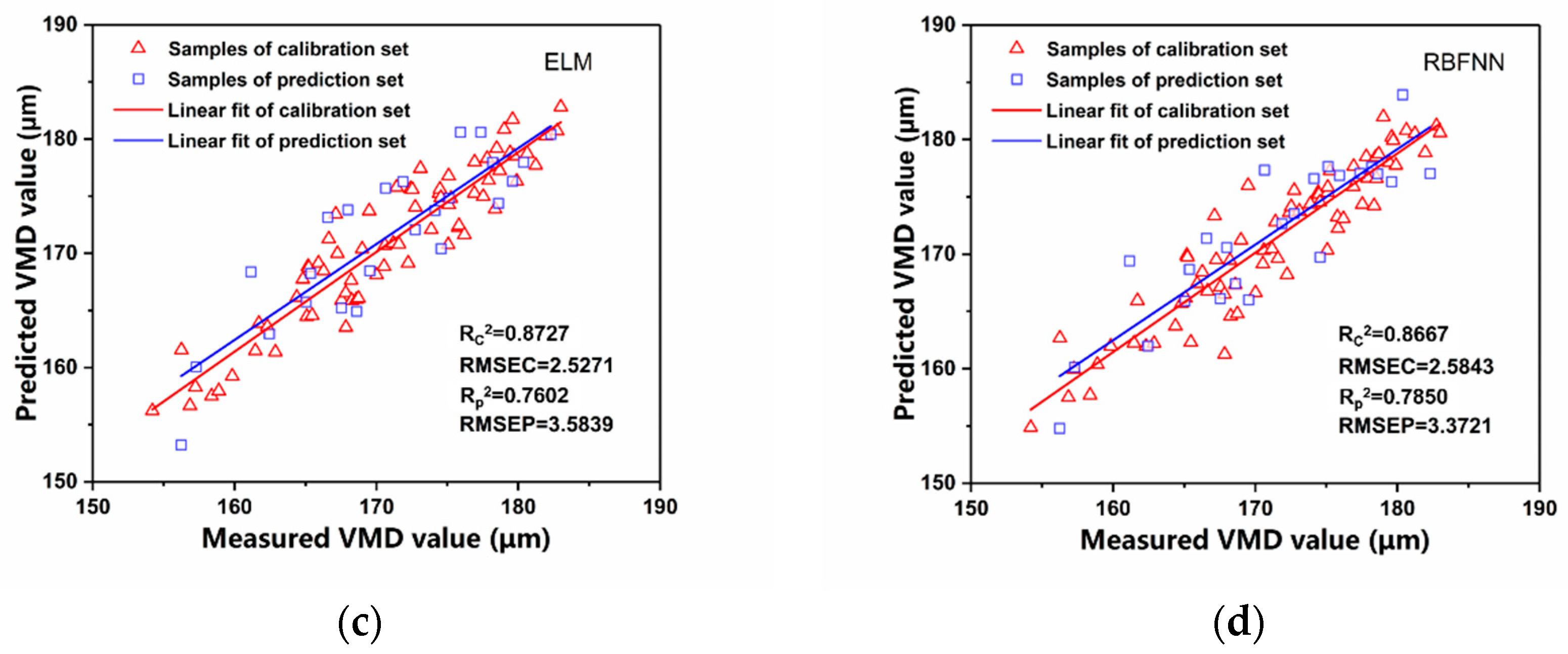
Extreme learning machine (ELM) is a feedforward neural network and has an extremely fast learning speed with a single hidden layer; it can be easily used to many applications by only setting the number of neurons in the hidden layer. It shows the advantage of generalization comparing with most gradient-based learning methods and simpler than neural networks learning algorithms in most cases [
41]. ELM was extended from the SLFNs (single-hidden layer feedforward neural networks) with additive or RBF hidden nodes to SLFNs with a wide variety of hidden nodes [
42]. It includes an input layer, hidden layer, and output layer, input weights link the input layer to the hidden layer, and output weights link the hidden layer to the output layer. Input weights and hidden biases are randomly chosen, Moore-Penrose generalized inverse is used to determine the output weights [
43]. ELM shows faster learning speed than SVM and tends to be more suitable in applications request speed and capability, it also can be applied to nonlinear modeling with its strong nonlinear learning ability.
Radial basis function neural network (RBFNN) is a three-layer feedforward neural network that includes an input layer, a hidden layer and an output layer, taking radial basis function (RBF) as the kernel function. Because of its fast training speed and strong generalization ability, it has been widely used in discrimination and regression analysis [
44]. The input layer connected with the external environment and consists of several perception neurons. Due to the output characteristics, there is only one hidden layer in the RBFNN, the hidden layer comprises some hidden nodes. The output layer comprises of some output nodes and acts as a responder for the input layer [
45]. RBFNN creates complex decision regions by utilizing overlapping localized regions comprise of simple kernel functions [
46]. There are two steps to accomplish the learning procedure of RBFNN, training of the kernel functions centers by using a clustering procedure, and calculating output weights by solving a system of linear equations [
47]. The RBF kernels used in this study directly rely on the computation of the relevant distances and reduce the complexity of training. For operating RBFNN on MATLAB, we must determine the best spread coefficient.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}