
Study on the Method and Mechanism of Seedling Picking for Pepper (Capsicum annuum L.) Plug Seedlings
Abstract
:1. Introduction
2. Materials and Methods
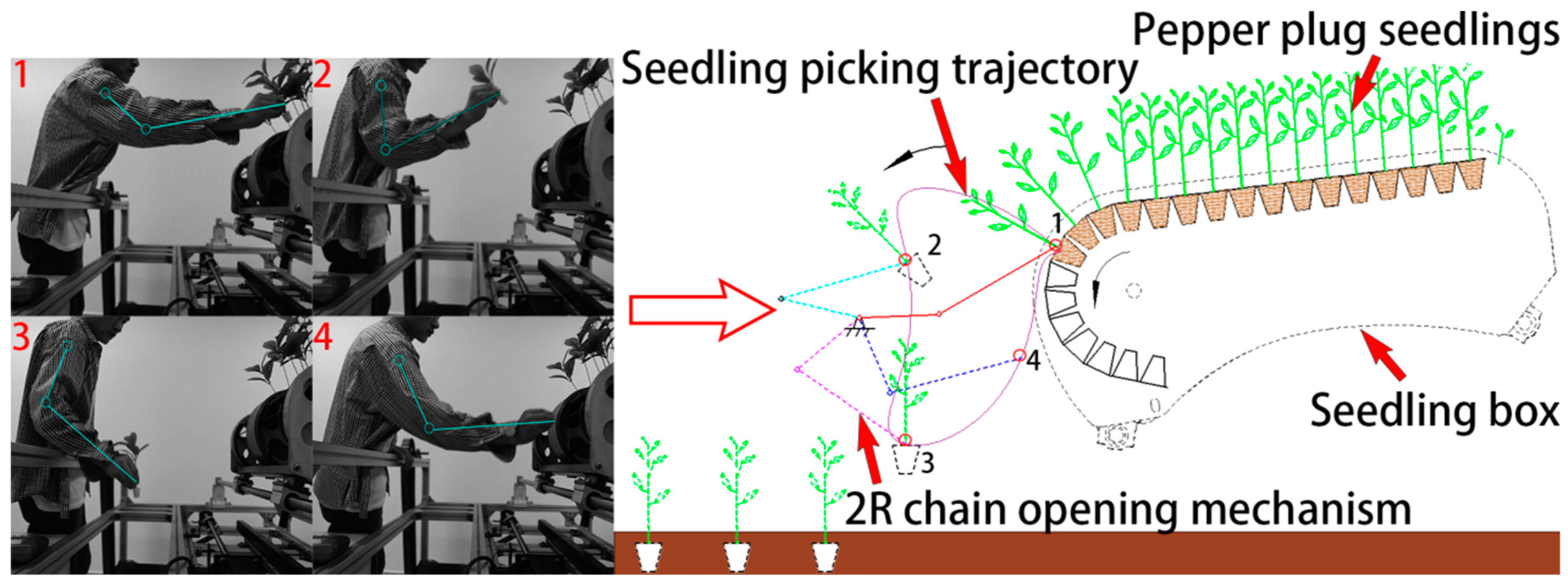
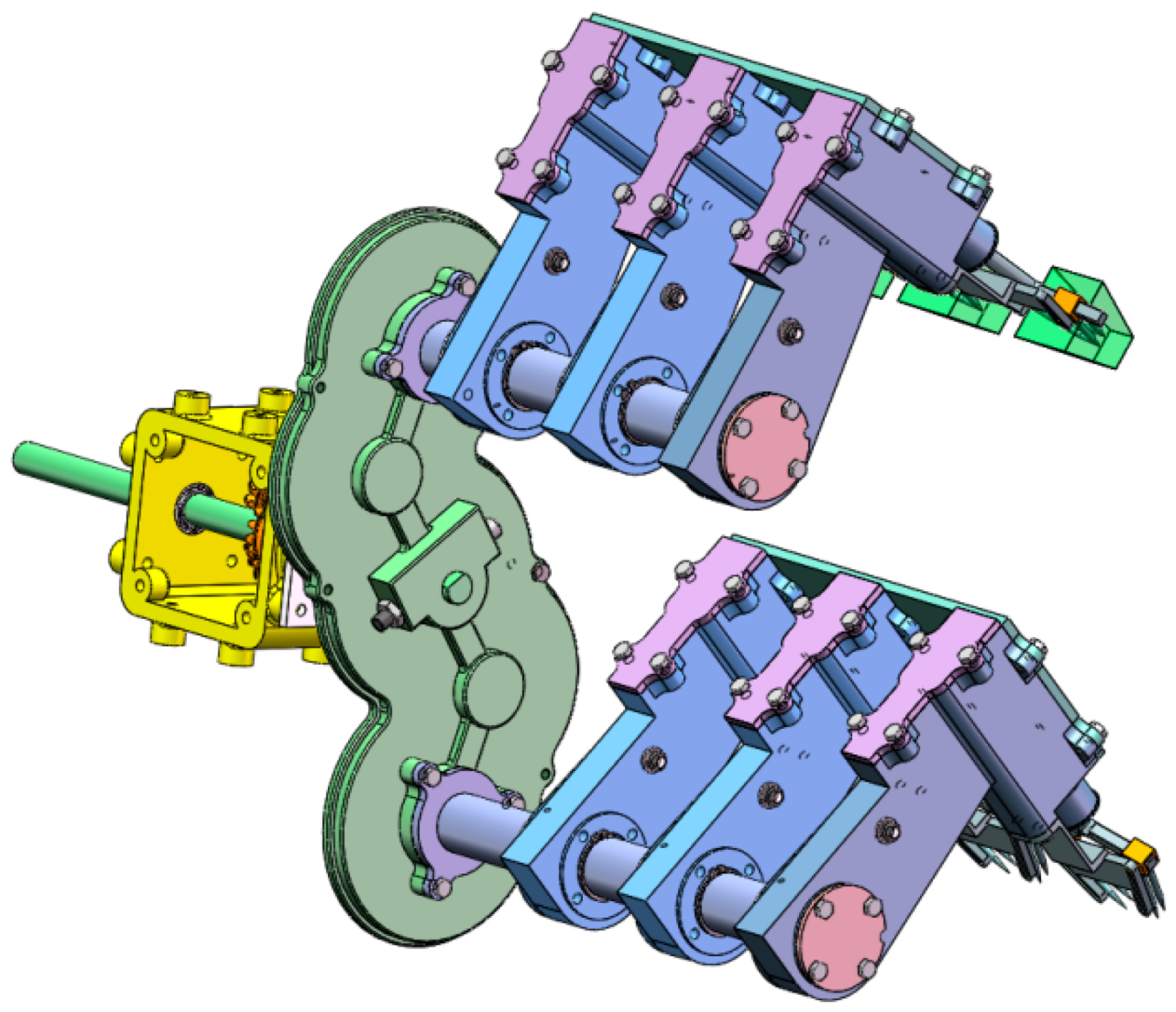
2.1. Design of the Seedling Picking Mechanism
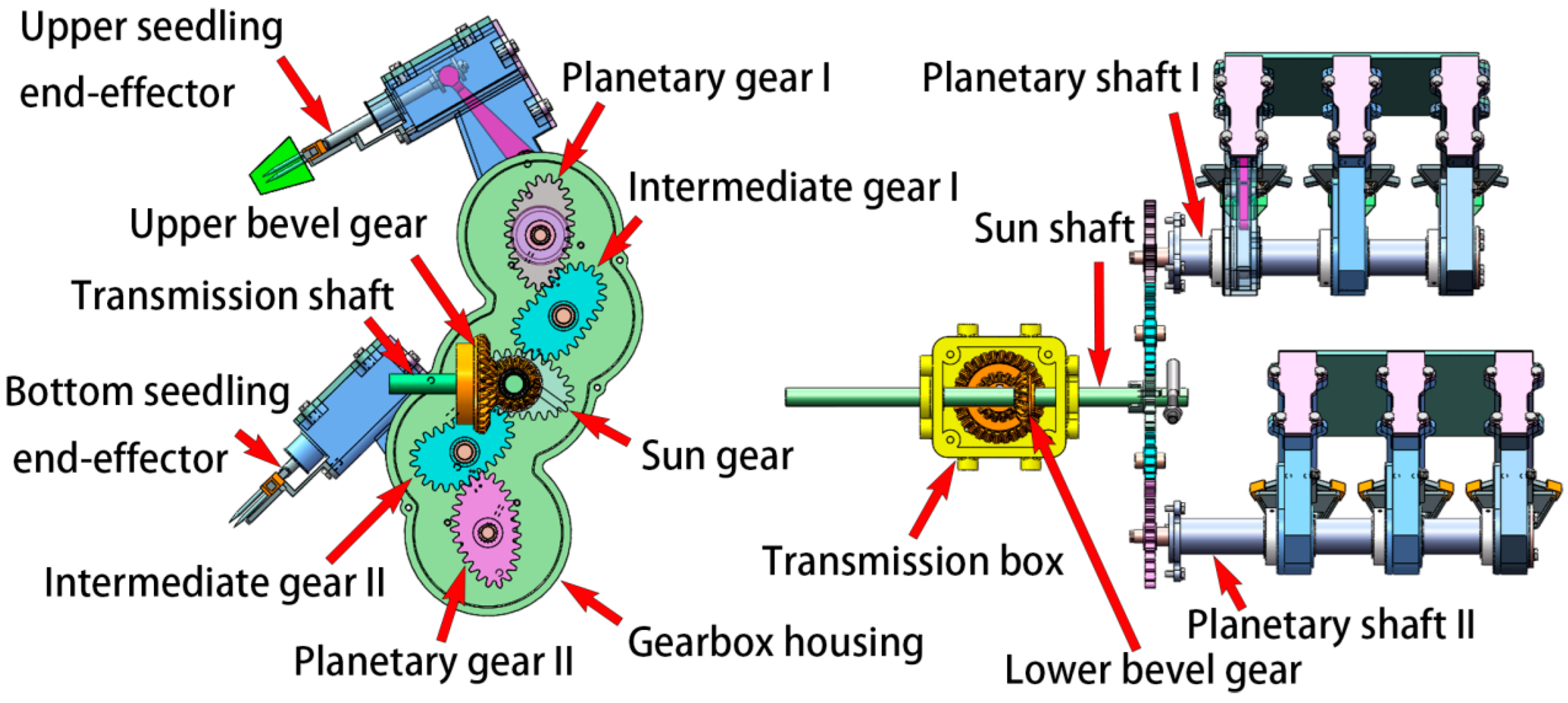
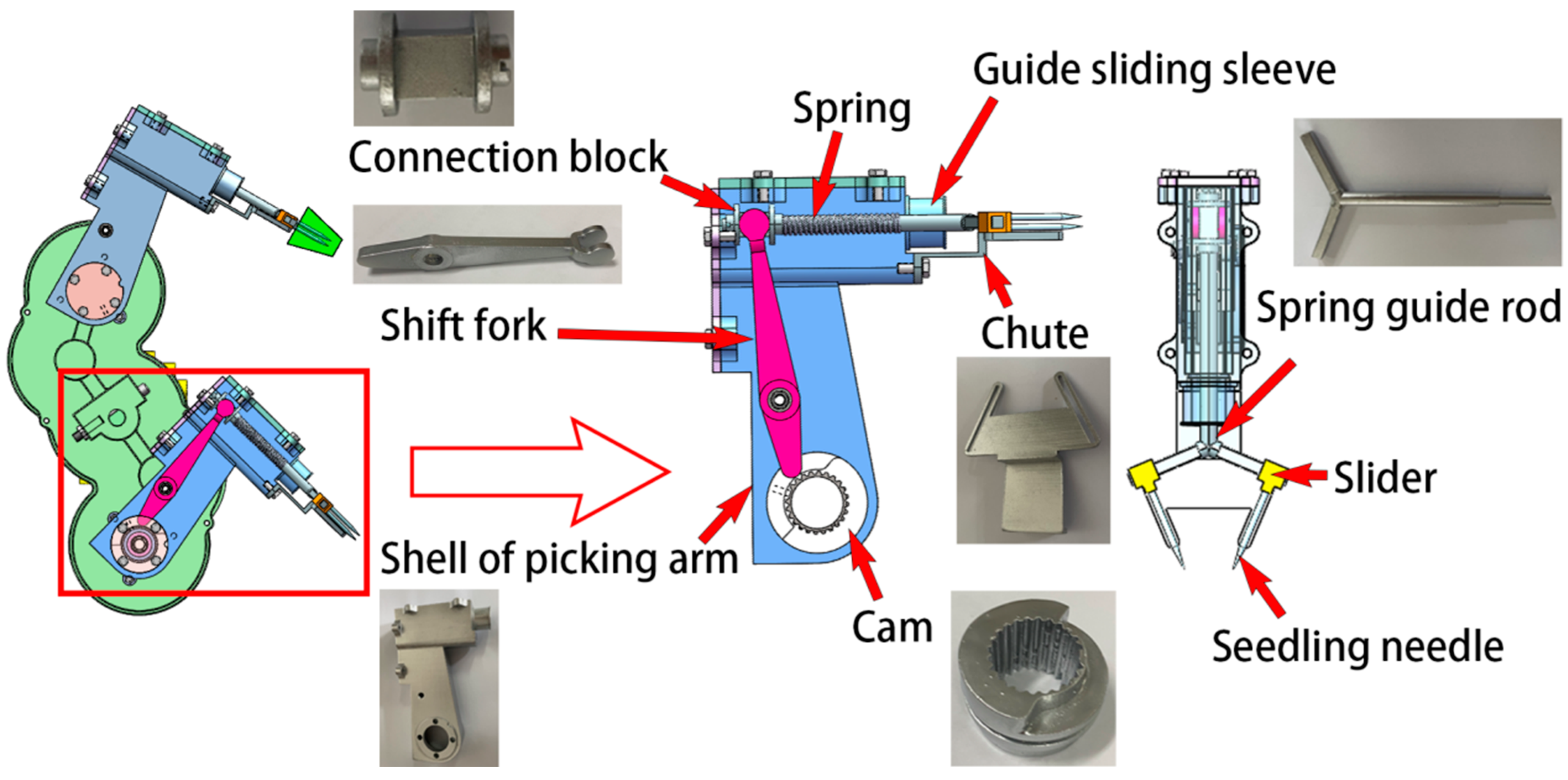
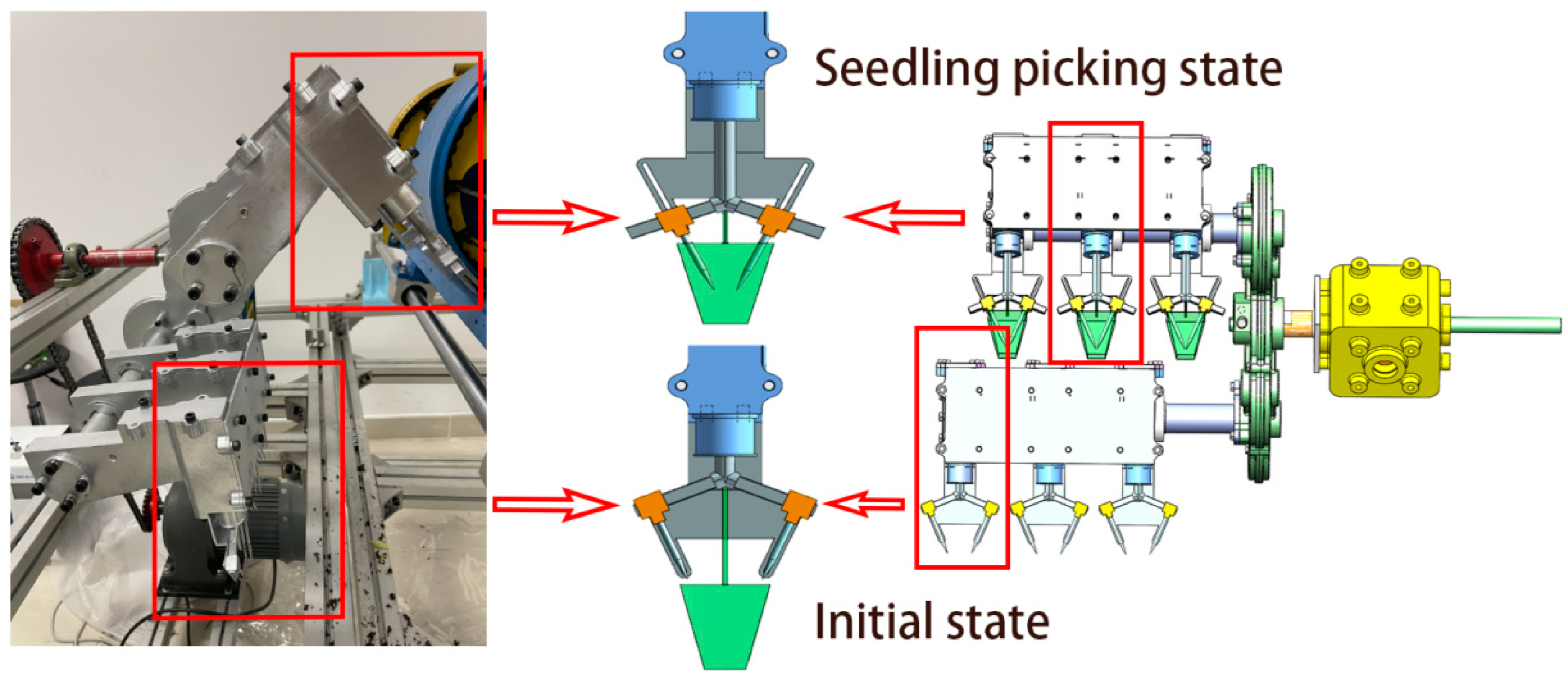
2.2. Composition and Working Principles of the Mechanism
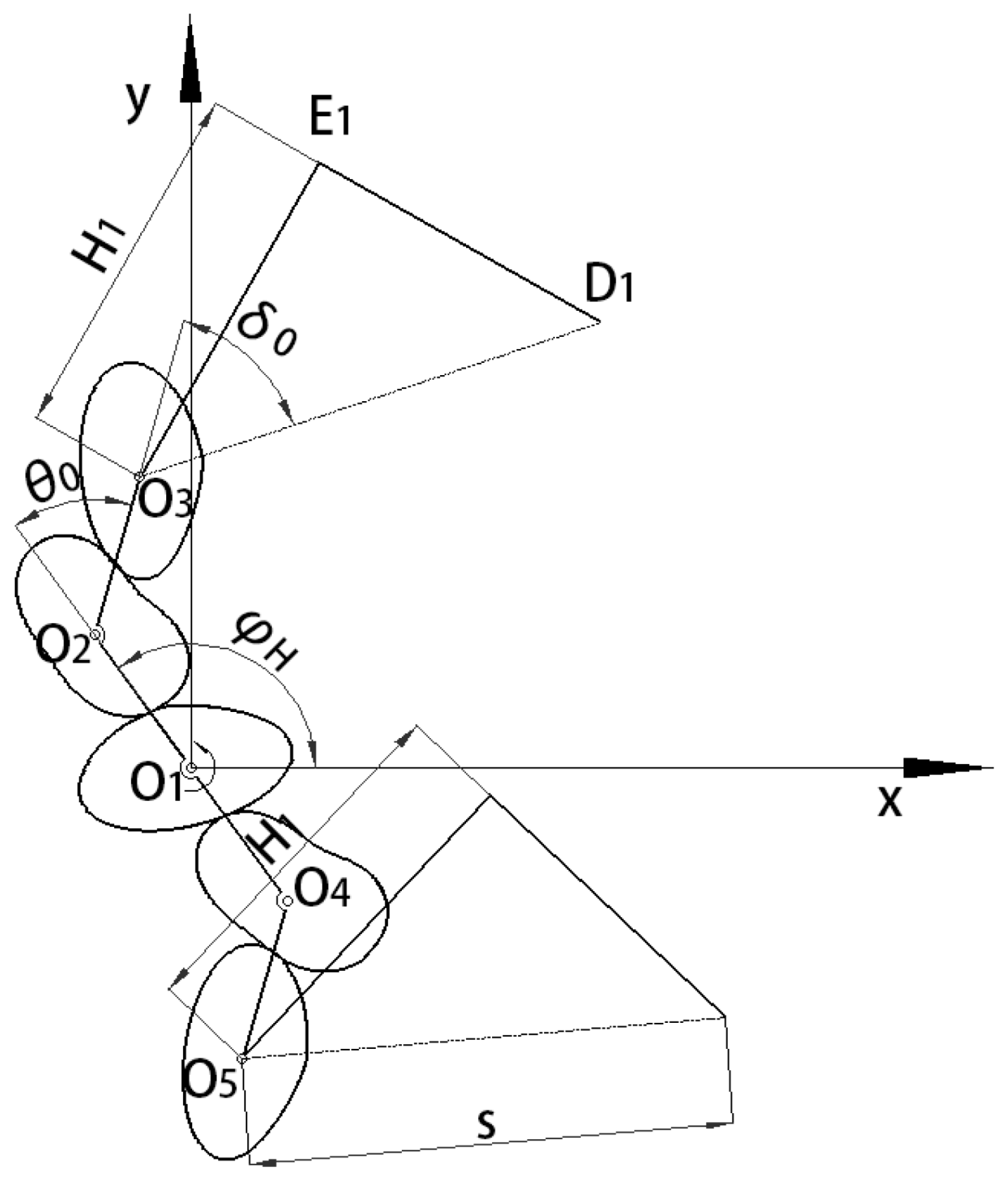
2.3. Kinematic Analysis
2.4. Trajectory and Attitude Analysis
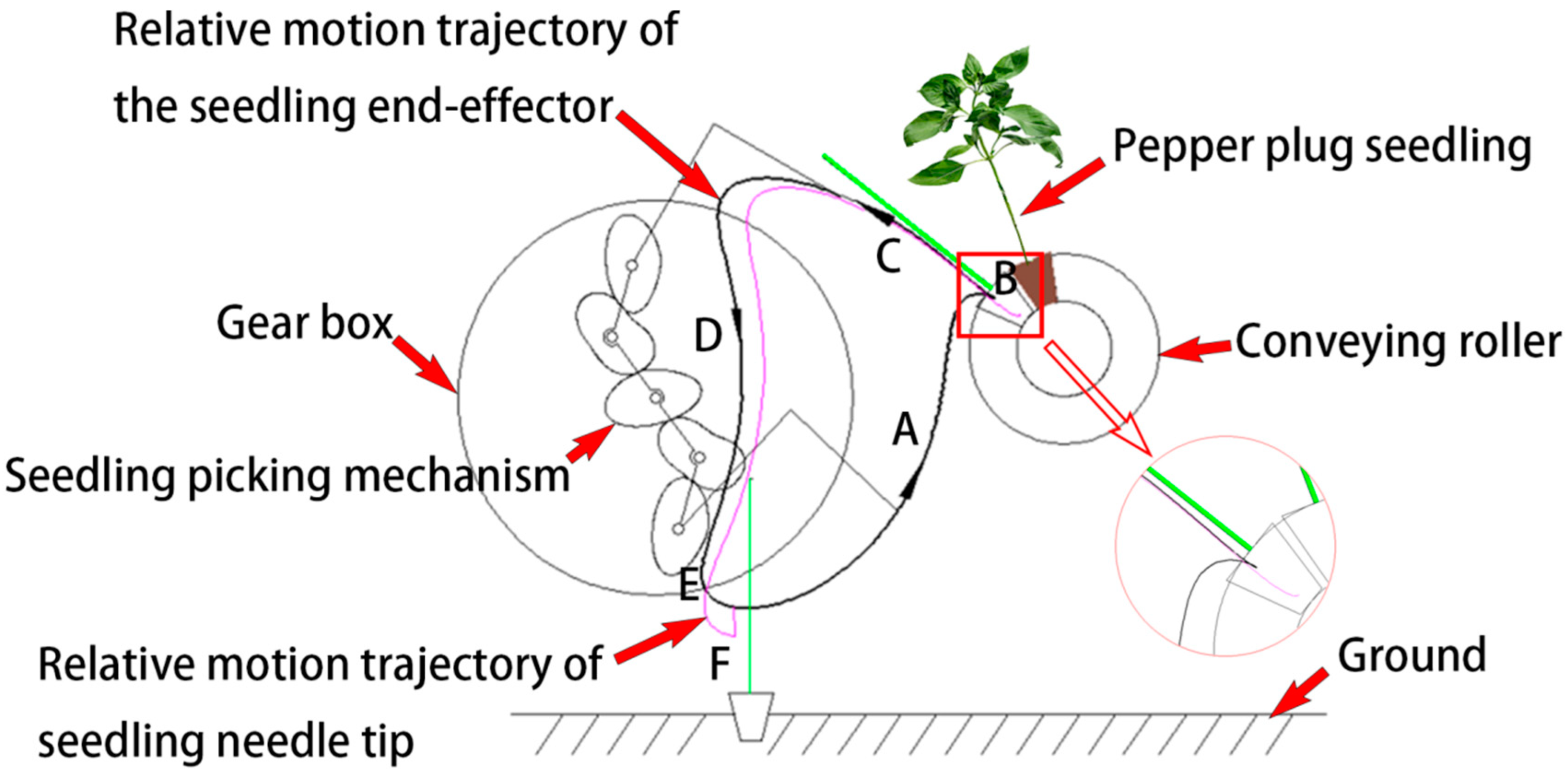
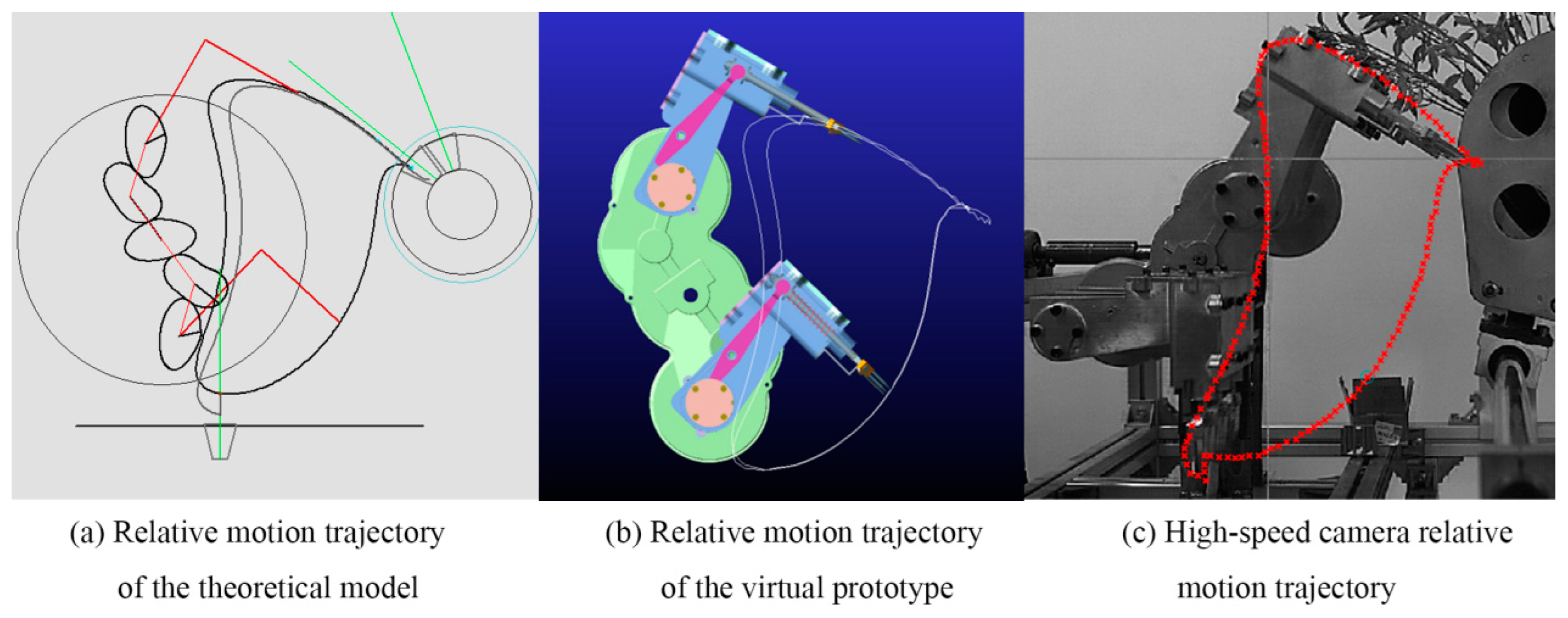
2.4.1. Relative Motion Trajectory Analysis
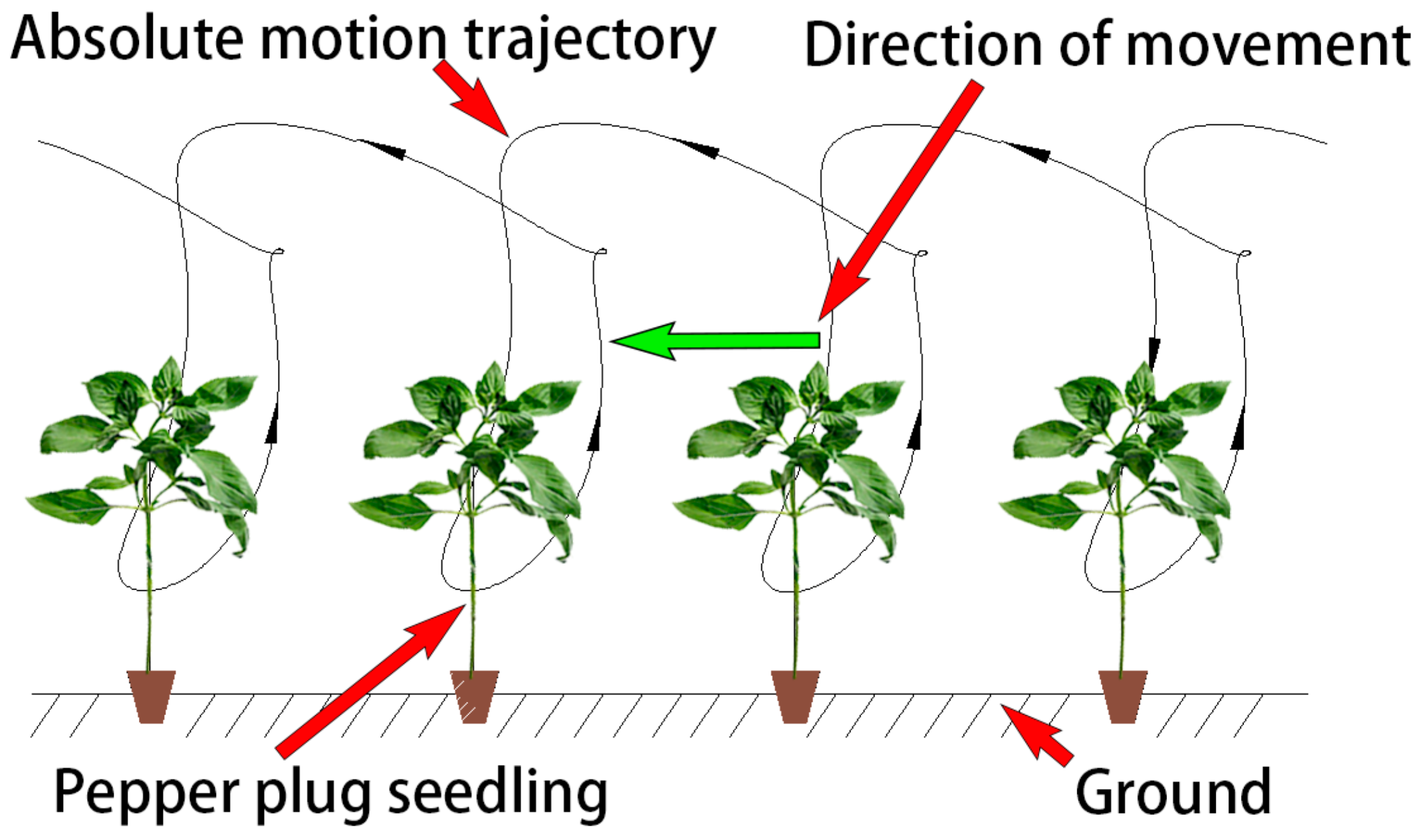
2.4.2. Absolute Motion Trajectory Analysis
2.5. Optimization and Analysis of the Seedling Picking Mechanism
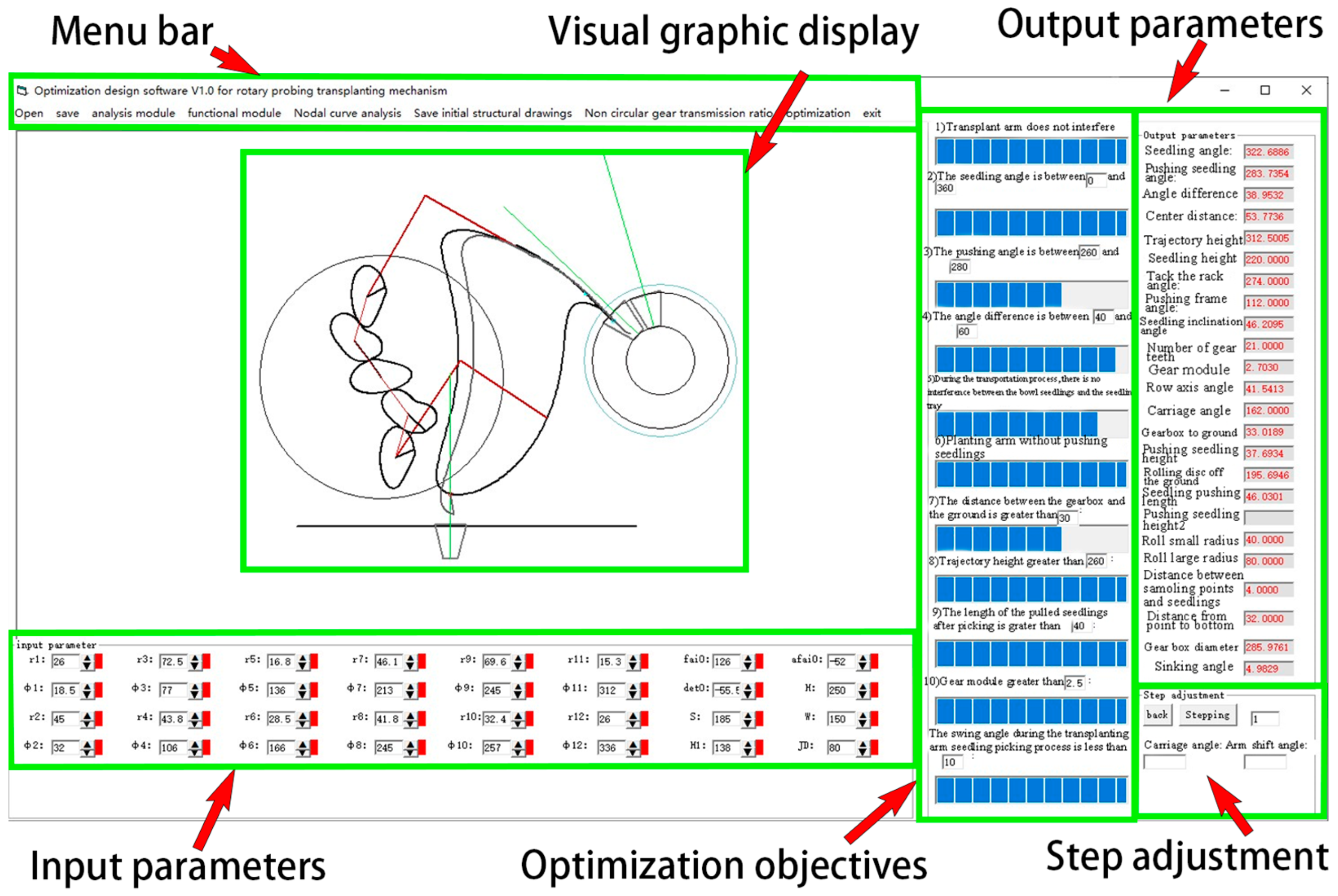
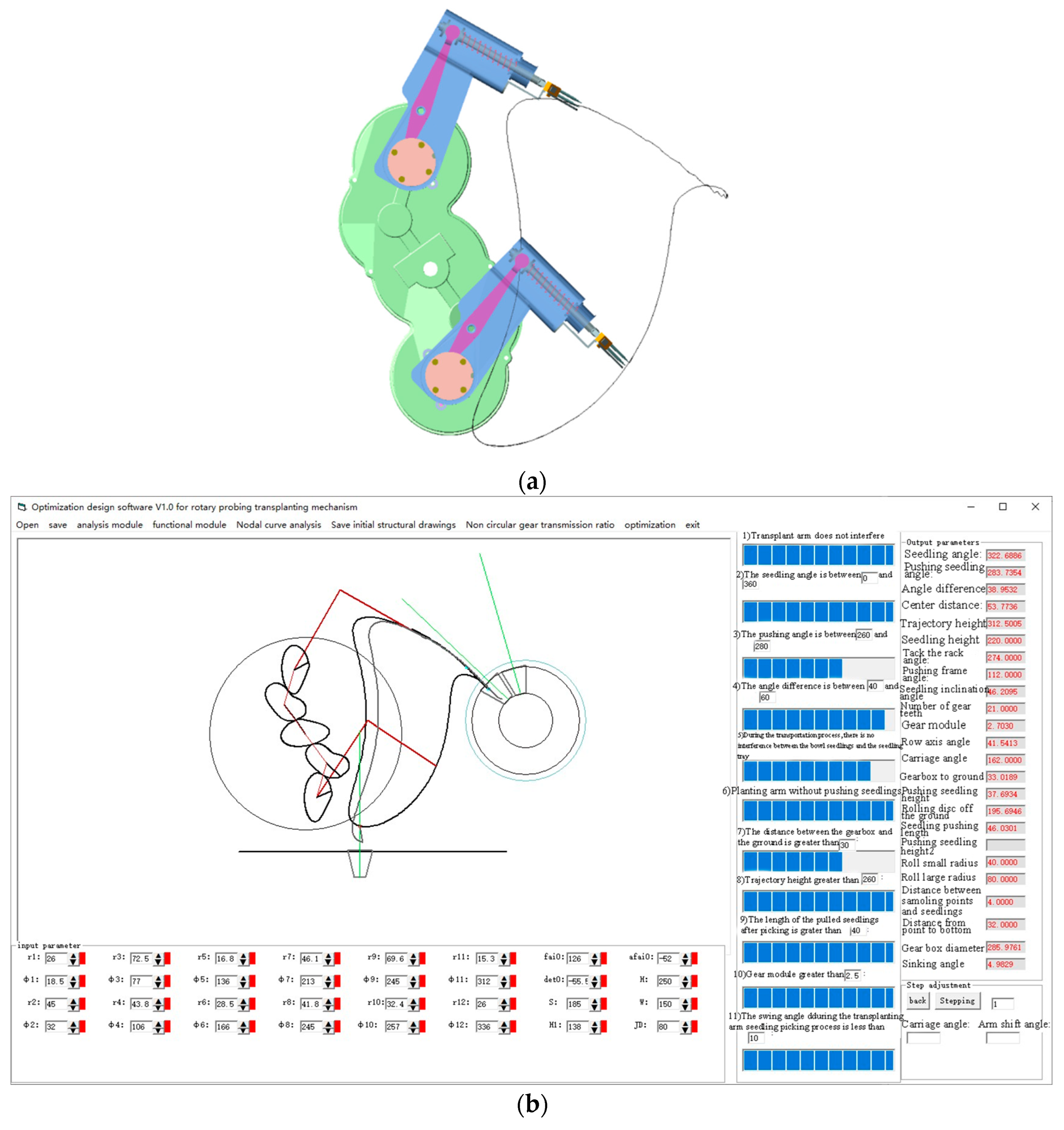
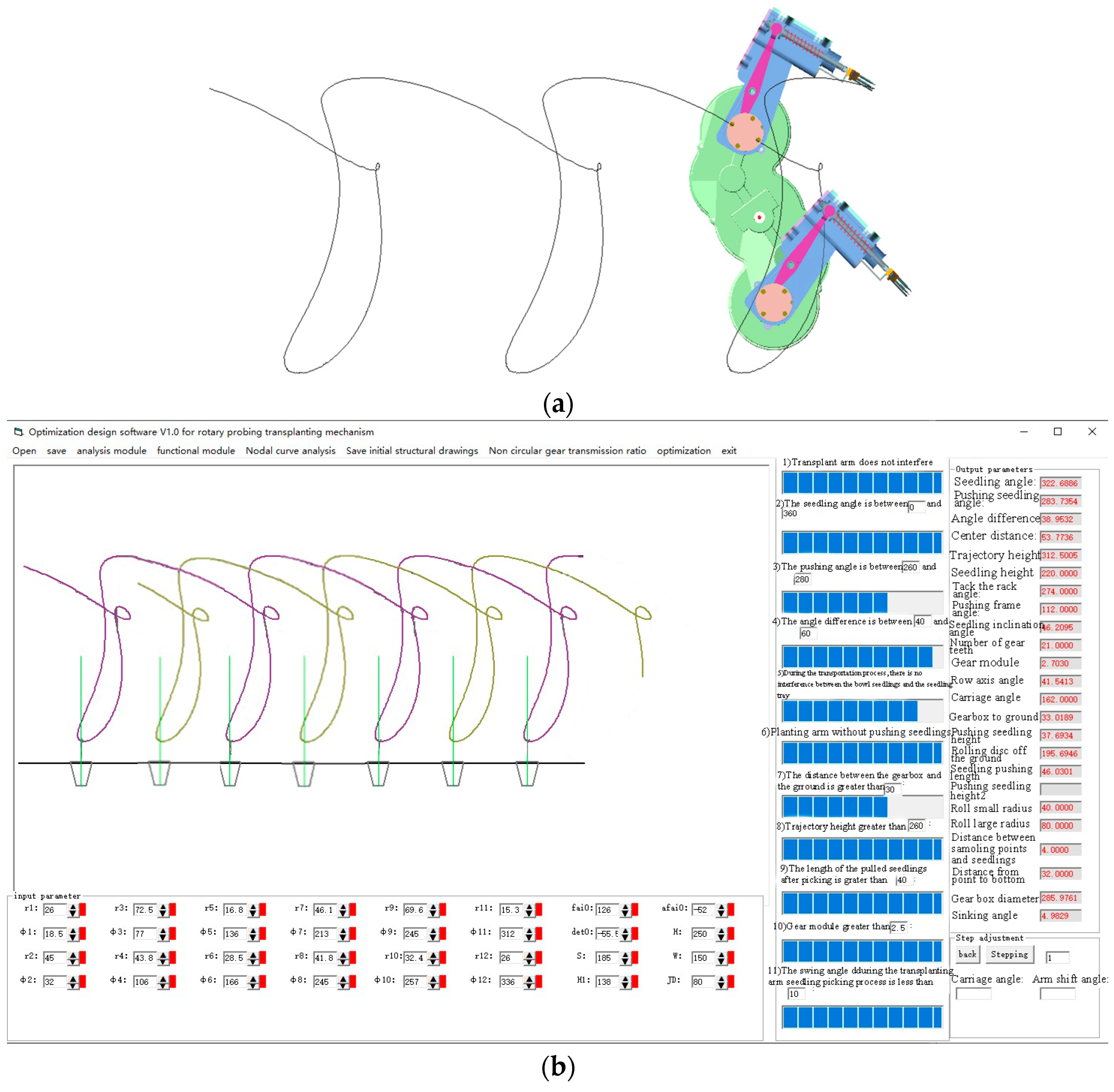
2.5.1. Optimization Design, Software Development, and Parameter Optimization
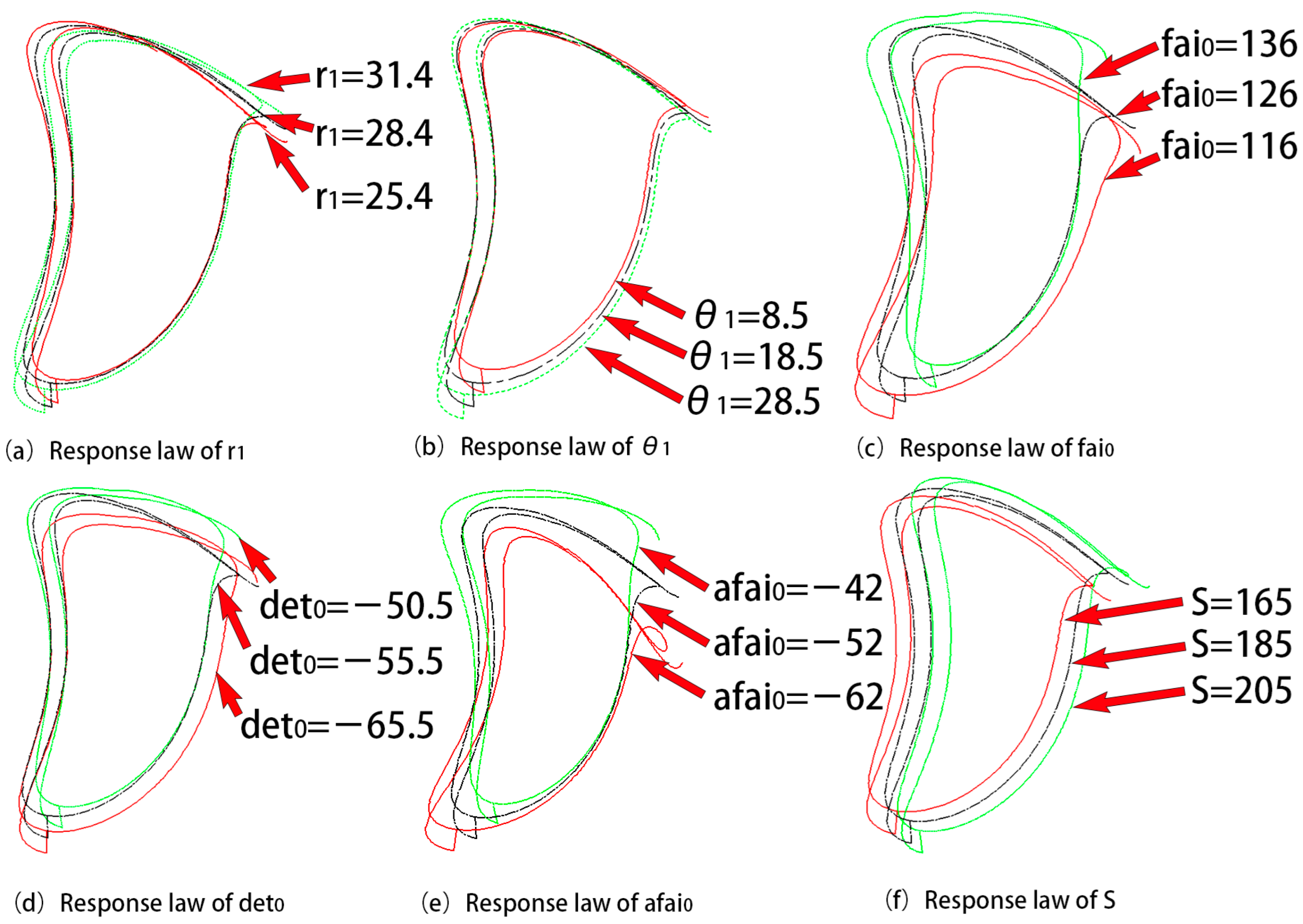
2.5.2. Parameter Response Law Analysis
- (1)
- Response Law of to the Optimization Objective of the Seedling Picking Mechanism
- (2)
- Response Law of to the Optimization Objective of the Seedling Picking Mechanism
- (3)
- Response Law of to the Optimization Objective of the Seedling Picking Mechanism
- (4)
- Response Law of to the Optimization Objective of the Seedling Picking Mechanism
- (5)
- Response Law of to the Optimization Objective of the Seedling Picking Mechanism
- (6)
- Response Law of S to the Optimization Objective of the Seedling Picking Mechanism
3. Test
3.1. Virtual Test
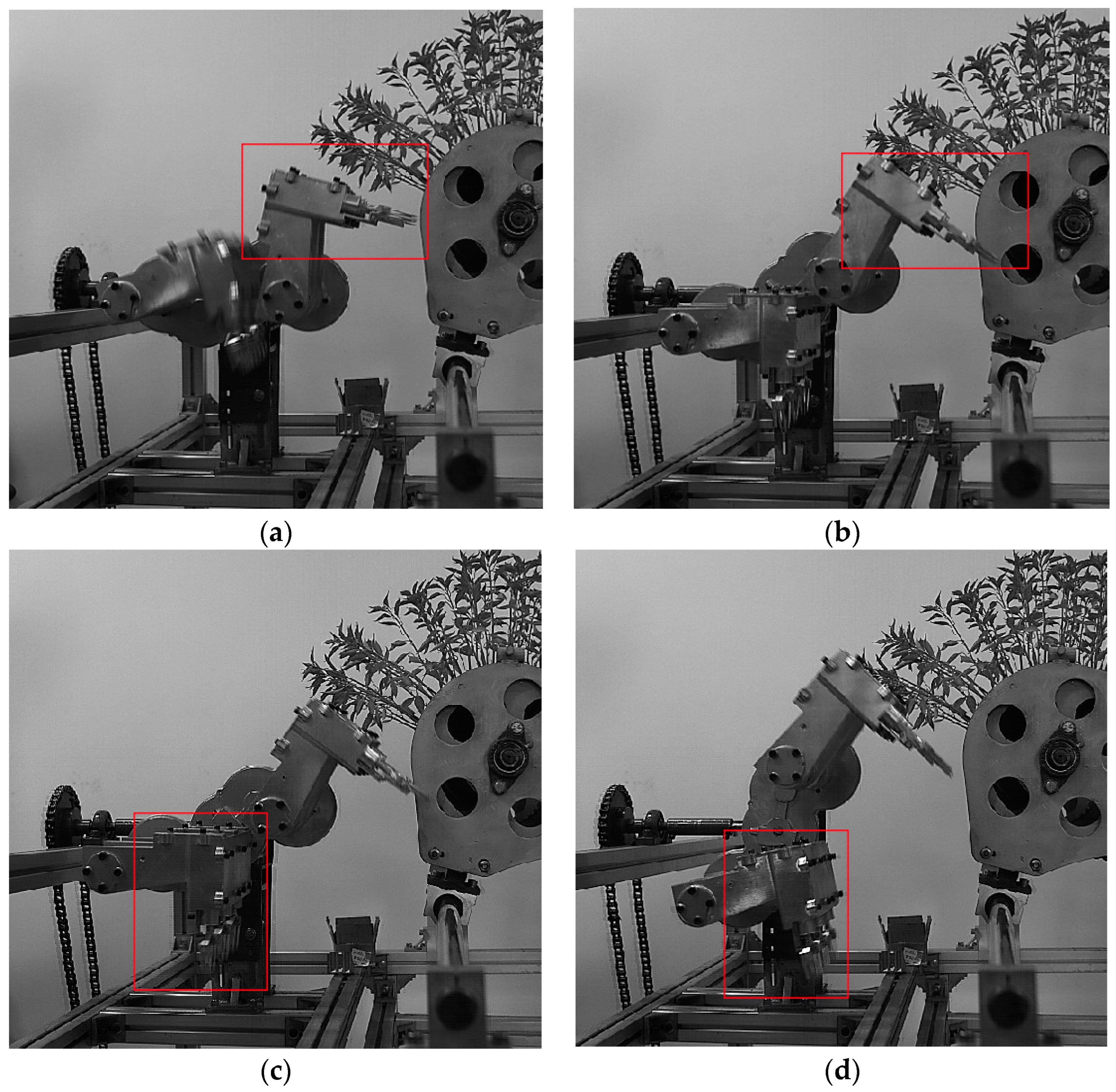
3.2. High-Speed Camera Test
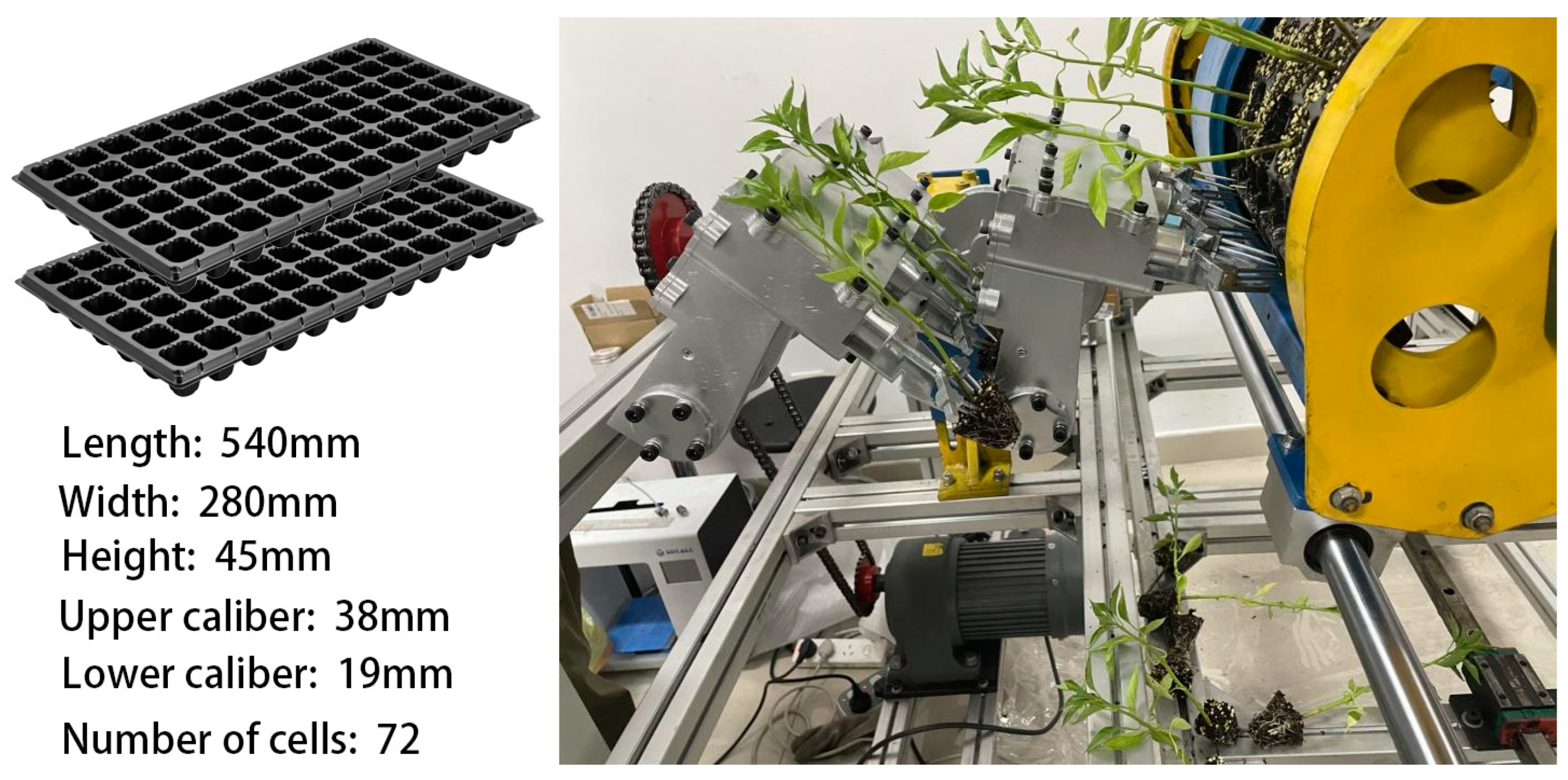
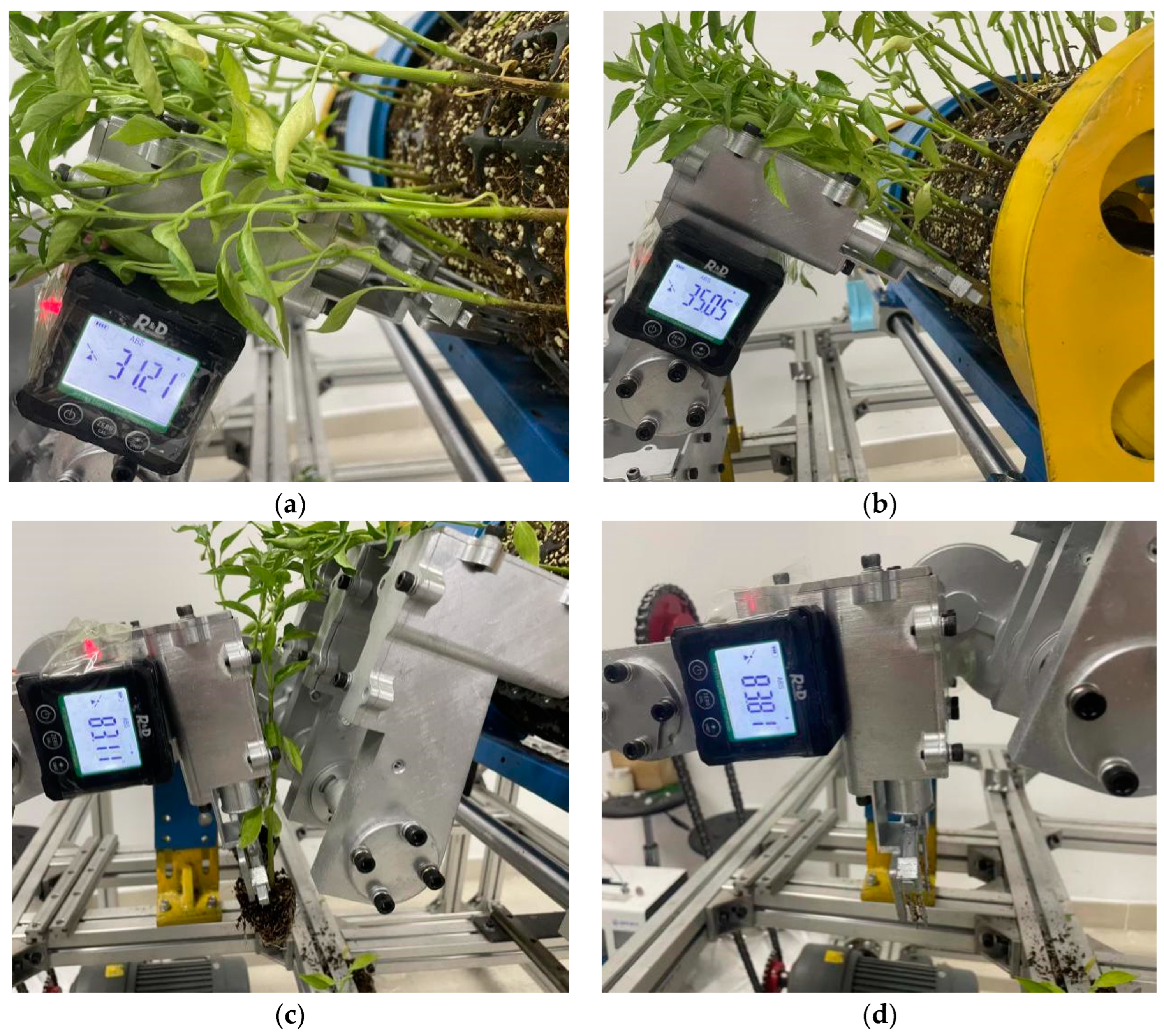
3.3. Seedling Picking Test
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Hu, S.; Hu, M.; Wang, J. Research progress on mechanized transplanting of pepper plug seedlings. J. Chin. Agric. Mech. 2021, 42, 24. [Google Scholar] [CrossRef]
- Wang, W.; He, G.M.; Wang, Y.N.; Wang, P.; Luo, P.S. Design and Experimental Research of Pepper Ridging and Laminating Machine. J. Agric. Mech. Res. 2020, 42, 57–62. [Google Scholar] [CrossRef]
- Failla, S.; Pirchio, M.; Sportelli, M.; Frasconi, C.; Fontanelli, M.; Raffaelli, M.; Peruzzi, A. Evolution of smart strategies and machines used for conservative management of herbaceous and horticultural crops in the mediterranean basin: A review. Agronomy 2021, 11, 106. [Google Scholar] [CrossRef]
- Jin, X.; Cheng, Q.; Zhao, B.; Ji, J.; Li, M. Design and test of 2zym-2 potted vegetable seedlings transplanting machine. Int. J. Agric. Biol. Eng. 2020, 13, 101–110. [Google Scholar] [CrossRef]
- Li, H.; Cao, W.; Li, S.; Fu, W.; Liu, K. Kinematic analysis and test on automatic pick-up mechanism for chili plug seedling. Nongye Gongcheng Xuebao/Trans. Chin. Soc. Agric. Eng. 2015, 31, 20–27. [Google Scholar] [CrossRef]
- Ji, J.; Sun, J.; Jin, X.; Li, M.; Du, X. Development of a PVDF sensor for potted seedling clamping force of vegetable transplanting. Int. J. Agric. Biol. Eng. 2019, 12, 111–118. [Google Scholar] [CrossRef]
- Jin, X.; Li, M.; Li, D.; Ji, J.; Pang, J.; Wang, J.; Peng, L. Development of automatic conveying system for vegetable seedlings. Eurasip J. Wirel. Commun. Netw. 2018, 2018, 178. [Google Scholar] [CrossRef]
- Zhou, M.; Sun, L.; Du, X.; Zhao, Y.; Xin, L. Optimal design and experiment of rice pot seedling transplanting mechanism with planetary Bezier gears. Trans. ASABE 2014, 57, 1537–1548. [Google Scholar] [CrossRef]
- Qingchun, F.; Chunjiang, Z.; Kai, J.; Pengfei, F.; Xiu, W. Design and test of tray-seedling sorting transplanter. Int. J. Agric. Biol. Eng. 2015, 8, 14–20. [Google Scholar] [CrossRef]
- Ye, B.L.; Yi, W.M.; Yu, G.H.; Gao, Y.; Zhao, X. Optimization design and test of rice plug seedling transplanting mechanism of planetary gear train with incomplete eccentric circular gear and non-circular gears. Int. J. Agric. Biol. Eng. 2017, 10, 43–55. [Google Scholar] [CrossRef]
- Liao, Q.; Zhang, Z.; Hu, Q.; Xu, B. Design and Trajectory Analysis of Pneumatic Picking-up Mechanism for Rape Paper Pot Seedling. Nongye Jixie Xuebao/Trans. Chin. Soc. Agric. Mach. 2017, 48, 70–78. [Google Scholar] [CrossRef]
- Han, C.; Xiao, L.; Xu, Y.; Zhang, J.; Li, H. Design and experiment of the automatic transplanter for chili plug seedlings. Nongye Gongcheng Xuebao/Trans. Chin. Soc. Agric. Eng. 2021, 37, 20–29. [Google Scholar] [CrossRef]
- Zhengi, S.; Long, X.; Liang, H.; Muhua, L.; Jing, L.; Jianhong, Z. Design and experiments of automatic taking and throwing device for chili plug seedlings. J. Chin. Agric. Mech. 2023, 44, 48. [Google Scholar] [CrossRef]
- Wang, X.; Liu, M.; Zhai, C.; Han, C.; Yang, S.; Gao, Y. Design and Experiment of Vegetable Transplanting Clip Stem Seedling Device. Trans. Chin. Soc. Agric. Mach. 2023, 54, 122–132. [Google Scholar] [CrossRef]
- Wen, Y.; Zhang, J.; Zhang, Y.; Tian, J.; Yuan, T.; Tan, Y.; Li, W. Development of insertion and ejection type seedling taking device for vegetable plug seedlings. Nongye Gongcheng Xuebao/Trans. Chin. Soc. Agric. Eng. 2020, 36, 96–104. [Google Scholar] [CrossRef]
- Yuan, T.; Wang, D.; Wen, Y.; Zhu, S.; Chen, Y.; Tan, Y. Design and Experiment of Seedlings Unloading Mechanism Based on Methods of Air-blowing and Vibration for Vegetable Transplanter. Nongye Jixie Xuebao/Trans. Chin. Soc. Agric. Mach. 2019, 50, 80–87. [Google Scholar] [CrossRef]
- Yin, D.; Wang, J.; Zhou, M.; Yang, Y.; Wang, J. Optimal Design and Experiment of Vegetable Potted Seedlings Pick-up Mechanism for Exploring and Picking-Pushing Plugs. Nongye Jixie Xuebao/Trans. Chin. Soc. Agric. Mach. 2019, 50, 64–71. [Google Scholar] [CrossRef]
- Wang, M.; Song, J.; Liu, C.; Wang, Y.; Sun, Y. Design and experiment of crank rocker type clamp seedlings mechanism of vegetable transplanter. Nongye Gongcheng Xuebao/Trans. Chin. Soc. Agric. Eng. 2015, 31, 49–57. [Google Scholar] [CrossRef]
- Gao, G.; Feng, T.; Li, F. Working parameters optimization and experimental verification of inclined-inserting transplanting manipulator for plug seedling. Nongye Gongcheng Xuebao/Trans. Chin. Soc. Agric. Eng. 2015, 31, 16–22. [Google Scholar] [CrossRef]
- Zhou, M.; Xue, X.; Qian, M.; Yin, D. Optimal Design and Experiment of Potted Vegetable Seedling Transplanting Mechanism with Punching Hole. Nongye Jixie Xuebao/Trans. Chin. Soc. Agric. Mach. 2020, 51, 77–83. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Serial Number | Optimization Objectives | Parameter Requirements |
|---|---|---|
| 1 | < 340° | |
| 2 | < 280° | |
| 3 | < 60° | |
| 4 | ||
| 5 | ||
| 6 | ||
| 7 | Module m of non-circular gears | 2.5 mm < m |
| 8 | < 10° | |
| 9 | No interference in seedling end-effector | Meet the conditions |
| 10 | No interference between pepper plug seedlings and hole plates during transportation | Meet the conditions |
| 11 | Seedling end actuator does not push seedlings | Meet the conditions |
| Parameter Symbols | Specific Values | Parameter Symbols | Specific Values |
|---|---|---|---|
| 28.4 | 18.5 | ||
| 45 | 32 | ||
| 98 | 77 | ||
| 46 | 106 | ||
| 33 | 136 | ||
| 22.5 | 166 | ||
| 64.1 | 213 | ||
| 32.8 | 245 | ||
| 64.6 | 245 | ||
| 53.4 | 257 | ||
| 25 | 312 | ||
| 26.8 | 336 | ||
| 126 | −55.5 | ||
| 185 | 138 | ||
| −52 | 250 |
| Start Poking Out/° | Fully Protrude/° | Start Retracting/° | Full Recovery/° | |
|---|---|---|---|---|
| Optimize software | 328.4 | 325.2 | 276.8 | 277.3 |
| High-speed test | 328.5 | 325.3 | 278 | 277.5 |
| Seeding picking test | 328.8 | 325 | 276.9 | 276.2 |
| Maximum angle error | +0.4 | −0.2 | +1.2 | −1.1 |
| Speed r/min | Total Number of Plants/Plant | Number of Successful Seedlings Taken/Plant | Success Rate/% |
|---|---|---|---|
| 30 | 140 | 135 | 96.4 |
| 40 | 140 | 132 | 94.3 |
| 50 | 140 | 128 | 91.4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, M.; Sun, H.; Xu, X.; Yang, J.; Wang, G.; Wei, Z.; Xu, T.; Yin, J. Study on the Method and Mechanism of Seedling Picking for Pepper (Capsicum annuum L.) Plug Seedlings. Agriculture 2024, 14, 11. https://doi.org/10.3390/agriculture14010011
Zhou M, Sun H, Xu X, Yang J, Wang G, Wei Z, Xu T, Yin J. Study on the Method and Mechanism of Seedling Picking for Pepper (Capsicum annuum L.) Plug Seedlings. Agriculture. 2024; 14(1):11. https://doi.org/10.3390/agriculture14010011
Chicago/Turabian StyleZhou, Maile, Hao Sun, Xin Xu, Jiajia Yang, Guibin Wang, Zhaoxiang Wei, Tingbo Xu, and Jianjun Yin. 2024. "Study on the Method and Mechanism of Seedling Picking for Pepper (Capsicum annuum L.) Plug Seedlings" Agriculture 14, no. 1: 11. https://doi.org/10.3390/agriculture14010011