
Predicting the Feed Intake of Cattle Based on Jaw Movement Using a Triaxial Accelerometer

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Animals
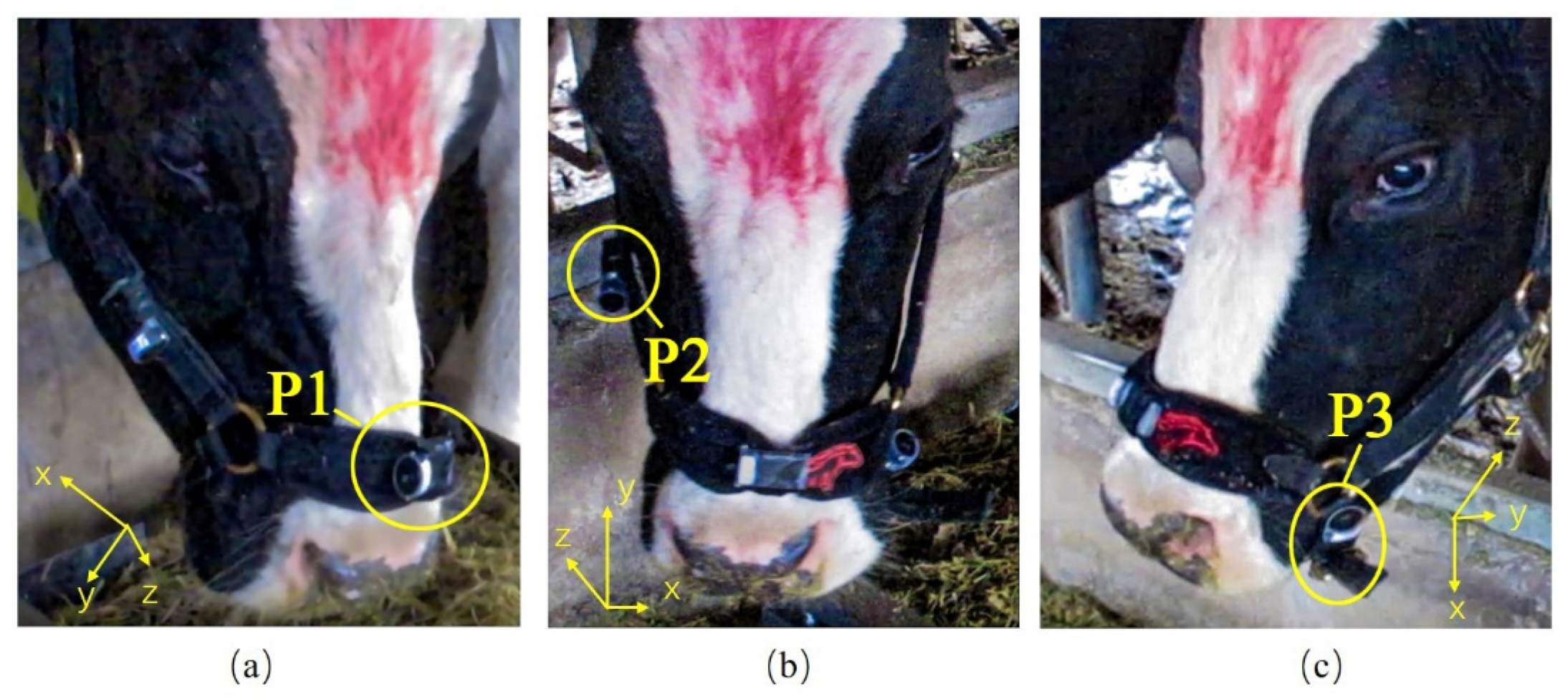
2.2. Data Collection
2.2.1. Accelerometer Signals during Feeding
2.2.2. Visual Observation of Jaw Movements
2.2.3. Feed Intake Rate during Measurement
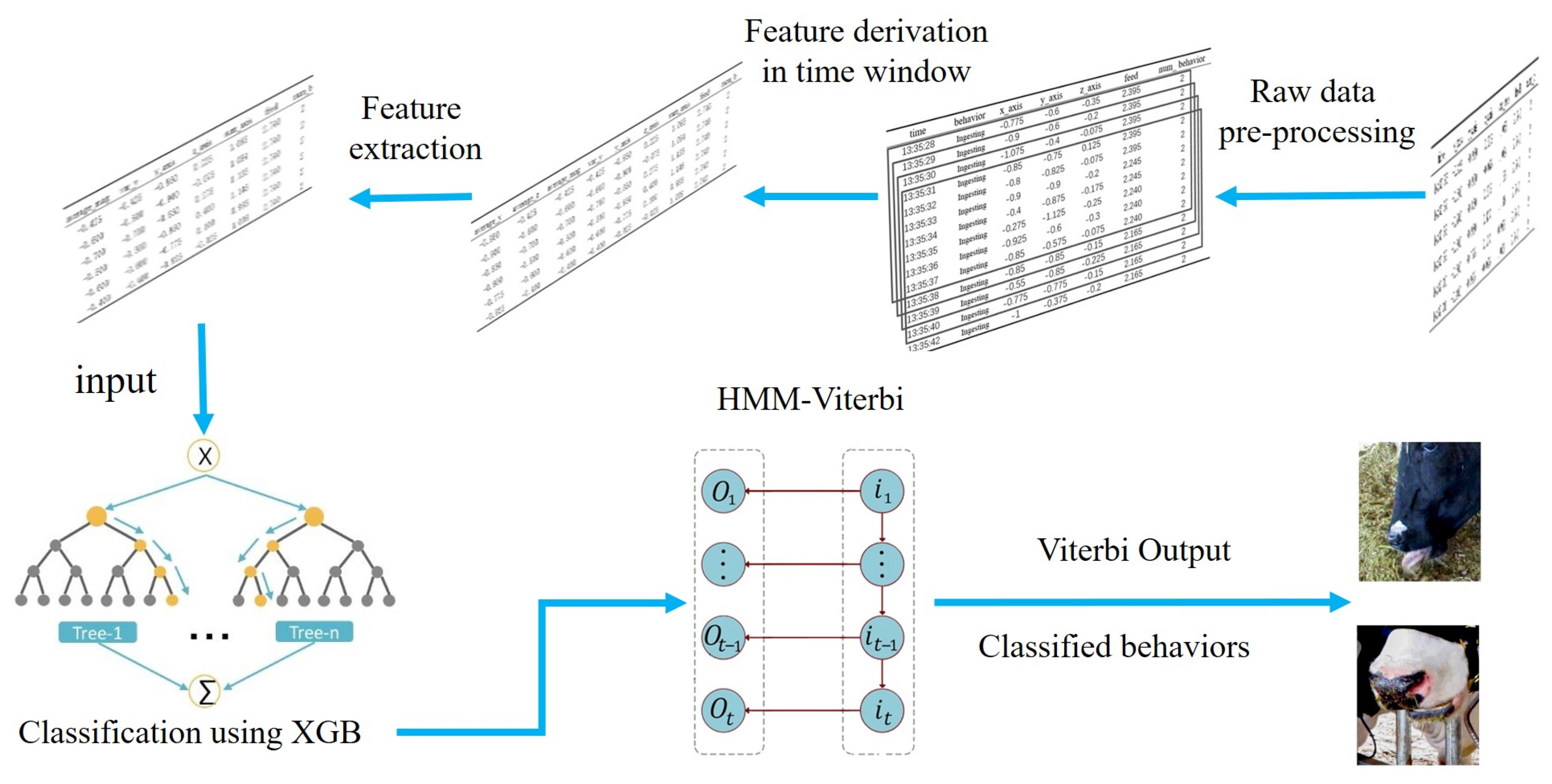
2.3. Data Processing of Raw Accelerometer Signal
2.4. Feature Extraction
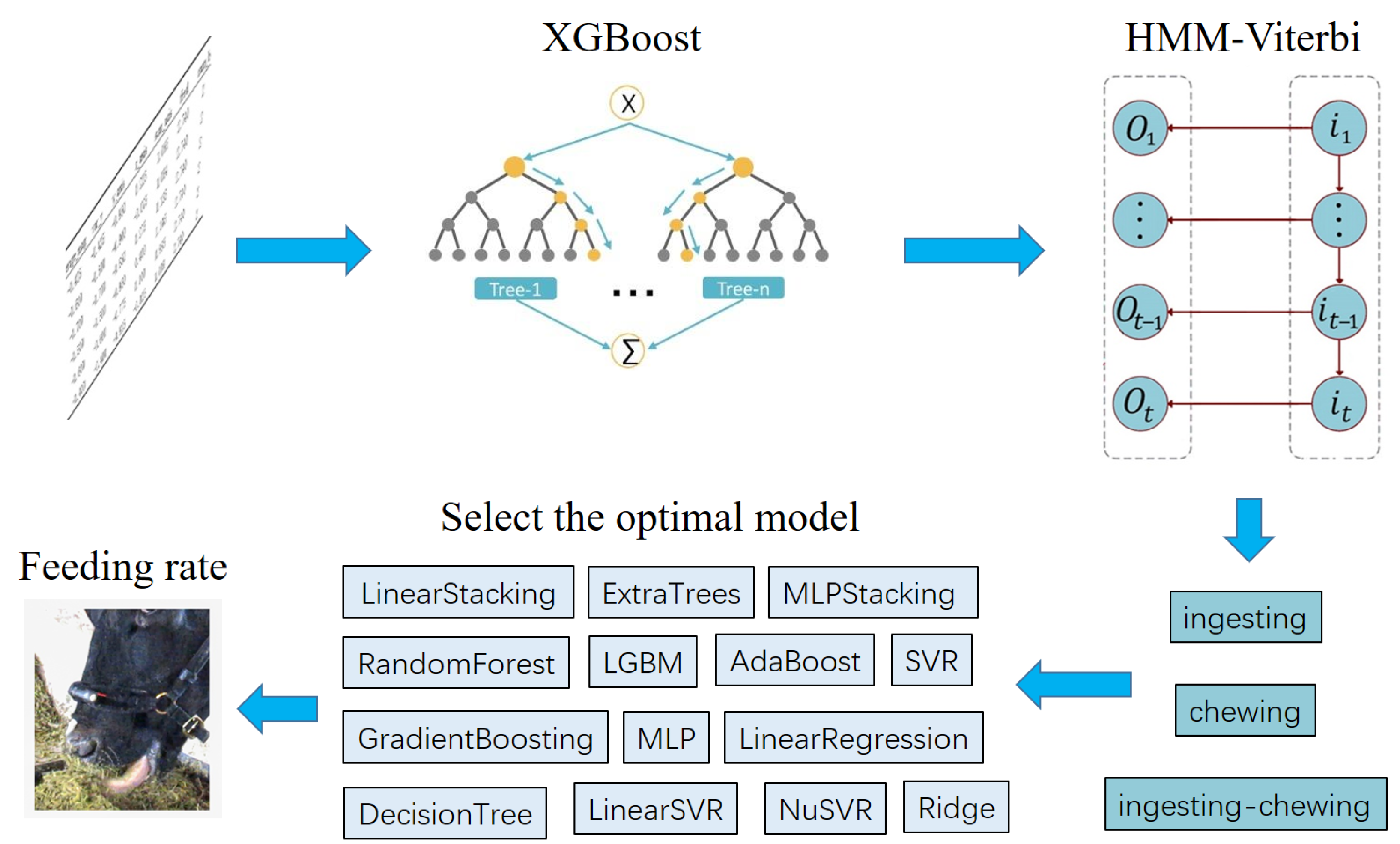
2.5. Activity Classification
2.6. Prediction of Feed Intake Rate
2.7. Evaluation of the Models for Behavior Classification and Feed Intake Prediction
2.7.1. Evaluation of Behavior Classification
2.7.2. Evaluation of Feed Intake Prediction
3. Results and Discussion
3.1. Observed Behavior and Feed Intake Rate
3.2. Jaw Movement Identification
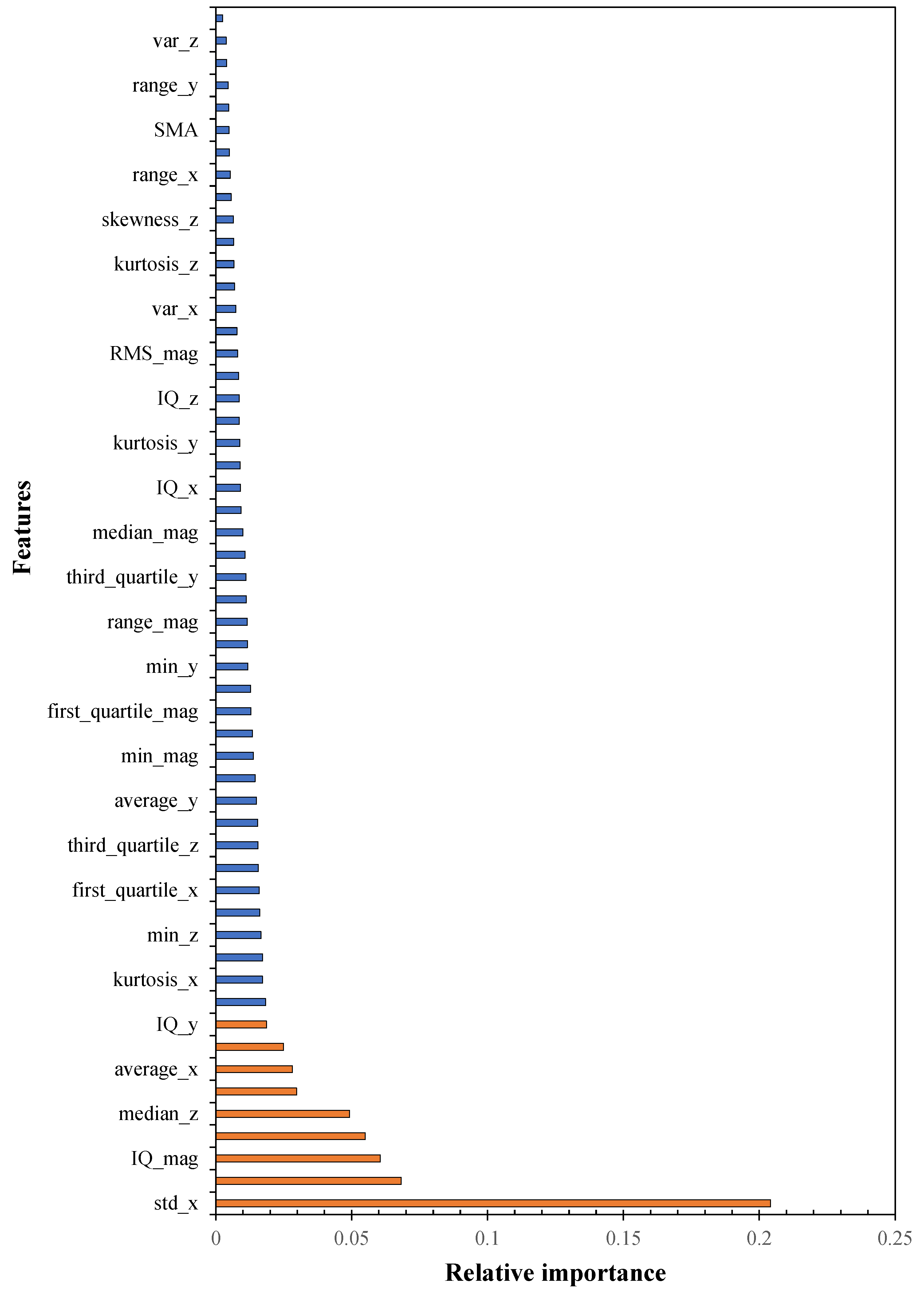
3.2.1. Importance of Features
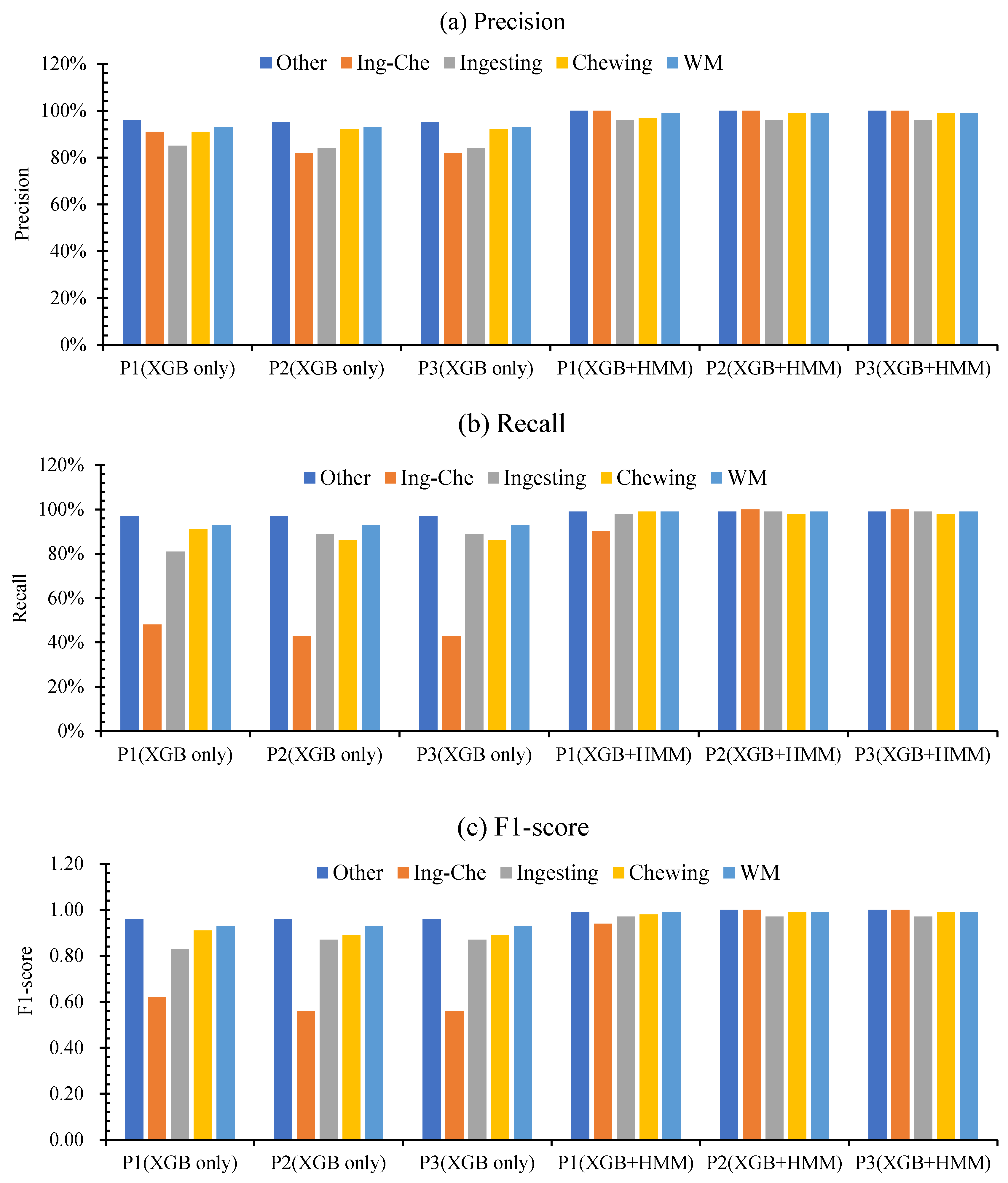
3.2.2. Classification of Jaw Movement Activities
3.2.3. Effect of Window Size on Behavior Classification
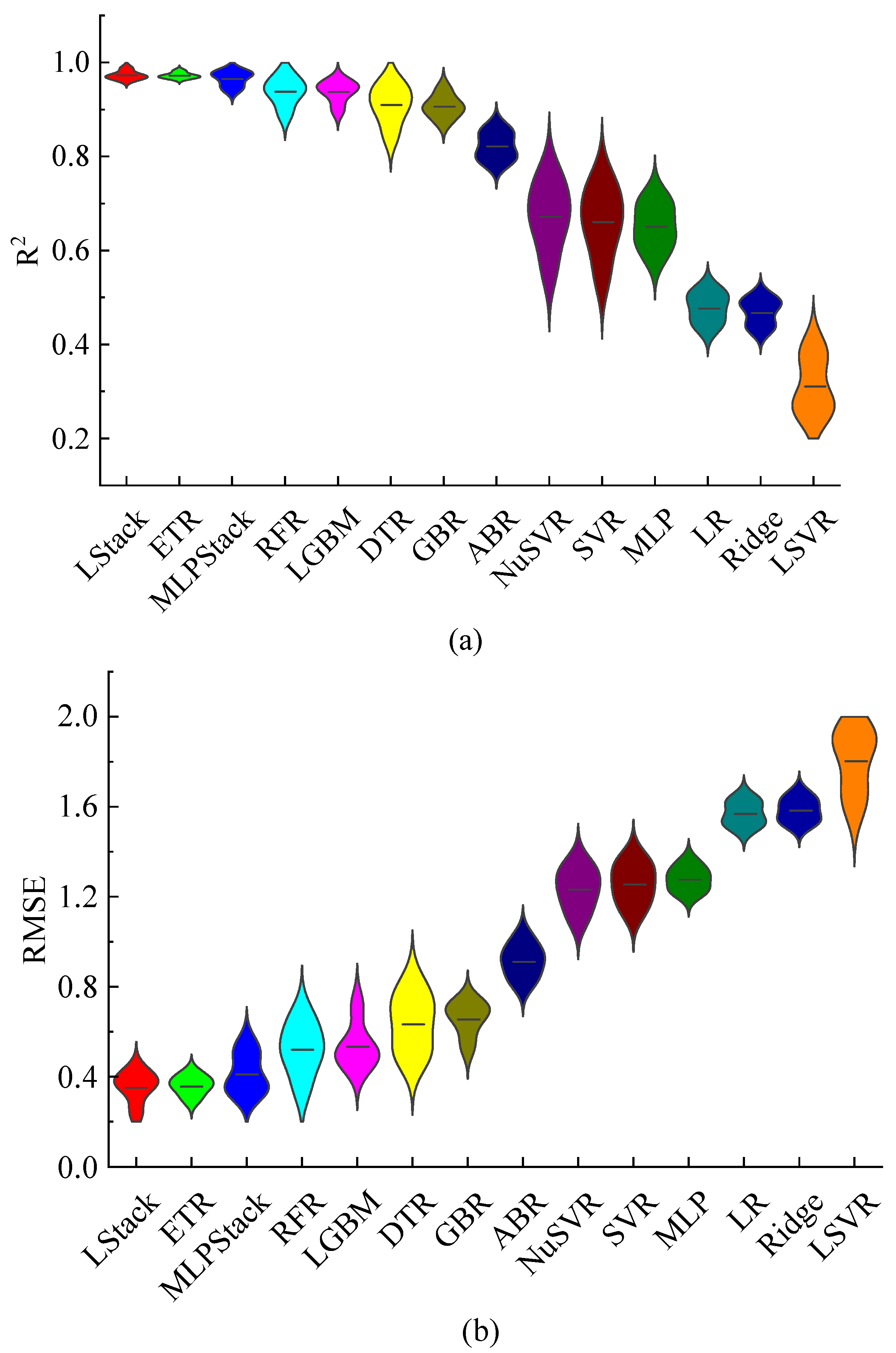
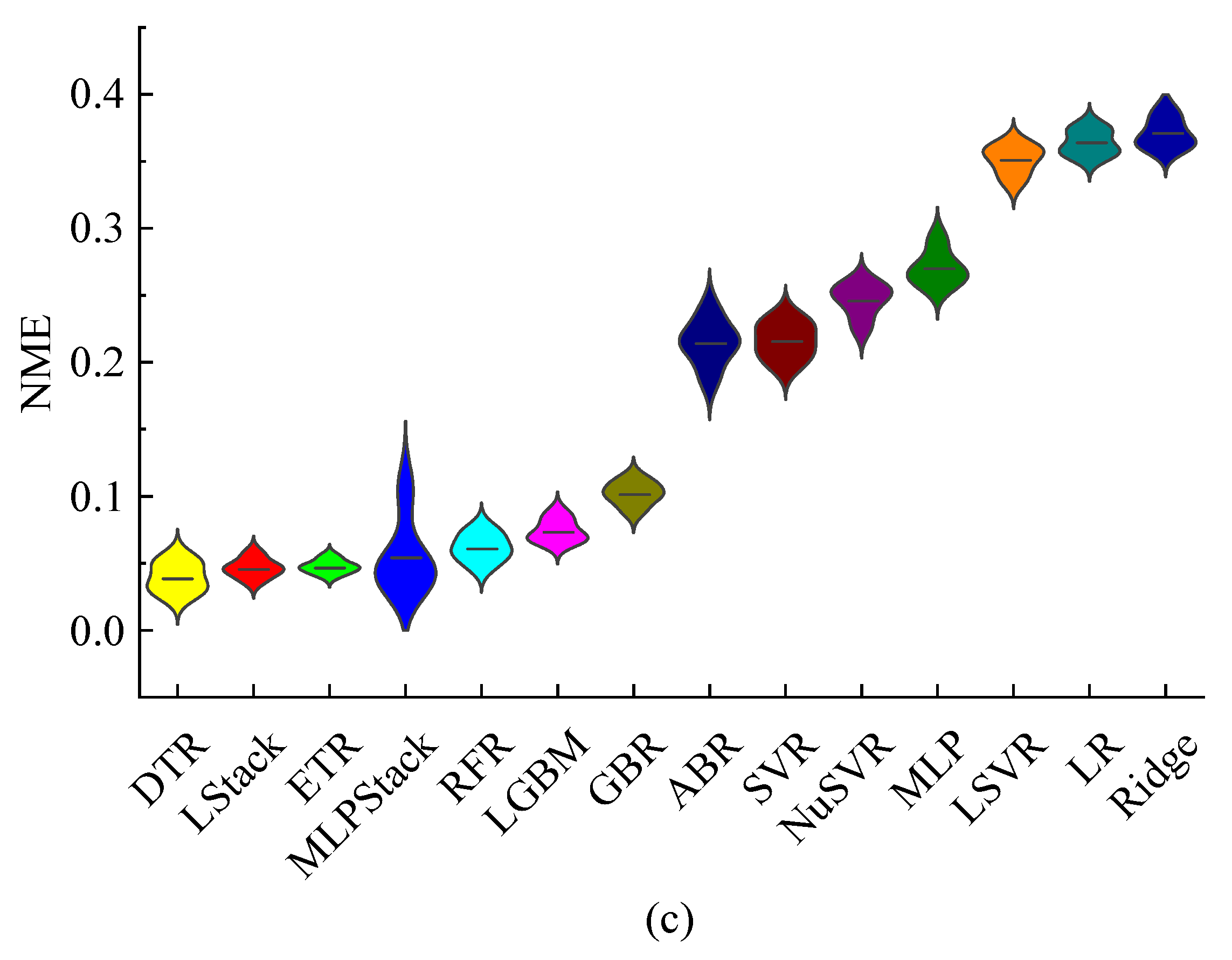
3.3. Prediction of Feed Intake Rate
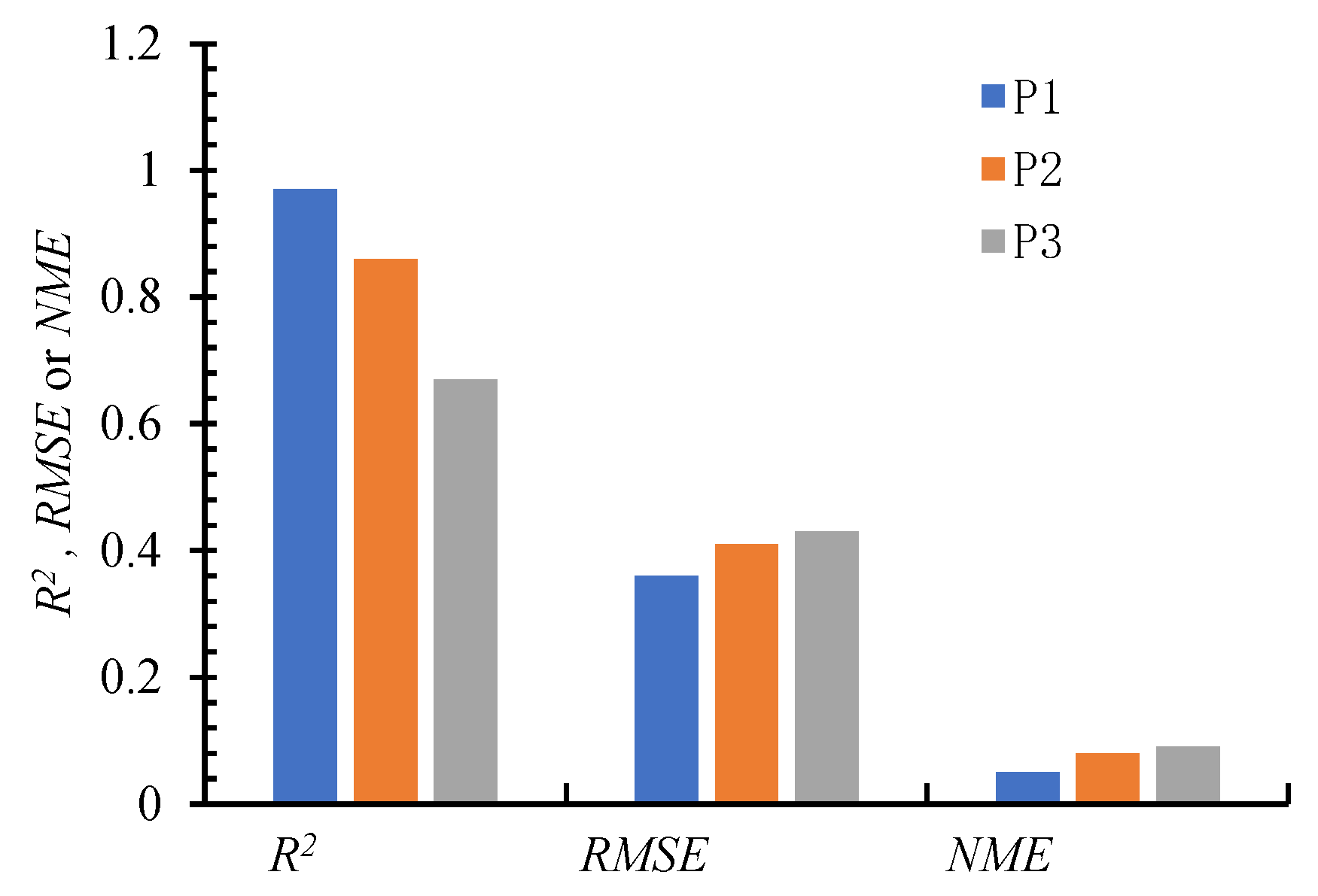
3.4. Effects of Monitoring Sites on Activity Identification and Feed Intake Prediction
3.5. Comparison with Similar Studies
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Green, T.C.; Jago, J.G.; Macdonald, K.A.; Waghorn, G.C. Relationships between residual feed intake, average daily gain, and feeding behavior in grow-ingdairy heifers. J. Dairy Sci. 2013, 96, 3098–3107. [Google Scholar] [CrossRef] [PubMed]
- Giovanetti, V.; Cossu, R.; Molle, G.; Acciaro, M.; Dimauro, C. Prediction of bite number and herbage intake by an accelerometer-based system in dairy sheep exposed to different forages during short-term grazing tests. Comput. Electron. Agric. 2020, 175, 105582. [Google Scholar] [CrossRef]
- Schirmann, K.; Weary, D.M.; Heuwieser, W.; Chapinal, N.; Cerri, R.L.A.; Keyserlingk, M.A.G.V. Short communication: Rumination and feeding behaviors differ between healthy and sick dairy cows during the transition period. J. Dairy Sci. 2016, 99, 9917––9924. [Google Scholar] [CrossRef] [PubMed]
- Hill, D.L.; Wall, E. Weather influences feed intake and feed efficiency in a temperate climate. J. Dairy Sci. 2017, 100, 2240–2257. [Google Scholar] [CrossRef] [PubMed]
- Galli, J.R.; Cangiano, C.A.; Milone, D.H.; Laca, E.A. Acoustic monitoring of short-term ingestive behavior and intake in grazing sheep. Livest. Sci. 2011, 140, 32–41. [Google Scholar] [CrossRef]
- Zehner, N.; UmstäTter, C.; Niederhauser, J.J.; Schick, M. System specification and validation of a noseband pressure sensor for measurement of ruminating and eating behavior in stable-fed cows. Comput. Electron. Agric. 2017, 136, 31–41. [Google Scholar] [CrossRef]
- Shen, W.; Zhang, A.; Zhang, Y.; Wei, X.; Sun, J. Rumination recognition method of dairy cows based on the change of noseband pressure. Inf. Process. Agric. 2020, 7, 479–490. [Google Scholar] [CrossRef]
- Navon, S.; Mizrach, A.; Hetzroni, A.; Ungar, E.D. Automatic recognition of jaw movements in free-ranging cattle, goats and sheep, using acoustic monitoring. Biosyst. Eng. 2013, 114, 474–483. [Google Scholar] [CrossRef]
- Hosseininoorbin, S.; Layeghy, S.; Kusy, B.; Jurdak, R.; Bishop-Hurley, G.J.; Greenwood, P.L.; Portmann, M. Deep Learning-based Cattle Activity Classification Using Joint Time-frequency Data Representation. Comput. Electron. Agric. 2021, 187, 106241. [Google Scholar] [CrossRef]
- Shen, W.; Cheng, F.; Zhang, Y.; Wei, X.; Zhang, Y. Automatic recognition of ingestive-related behaviors of dairy cows based on triaxial acceleration. Inf. Process. Agric. 2020, 7, 427–443. [Google Scholar] [CrossRef]
- Arablouei, R.; Currie, L.; Kusy, B.; Ingham, A.; Bishop-Hurley, G. In-situ classification of cattle behavior using accelerometry data. Comput. Electron. Agric. 2021, 183, 106045. [Google Scholar] [CrossRef]
- Pereira, G.M.; Sharpe, K.T.; Heins, B.J. Evaluation of the RumiWatch system as a benchmark to monitor feeding and locomotion behaviors of grazing dairy cows. J. Dairy Sci. 2021, 104, 3736–3750. [Google Scholar] [CrossRef] [PubMed]
- Oudshoorn, F.W.; Cornou, C.; Hellwing, A.L.F.; Hansen, H.H.; Munksgaard, L.; Lund, P.; Kristensen, T. Estimation of grass intake on pasture for dairy cows using tightly and loosely mounted di- and tri-axial accelerometers combined with bite count. Comput. Electron. Agric. 2013, 99, 227–235. [Google Scholar] [CrossRef]
- Arcidiacono, C.; Porto, S.M.C.; Mancino, M.; Cascone, G. Development of a threshold-based classifier for real-time recognition of cow feeding and standing behavioural activities from accelerometer data. Comput. Electron. Agric. 2017, 134, 124–134. [Google Scholar] [CrossRef]
- Barwick, J.; Lamb, D.W.; Dobos, R.; Welch, M.; Trotter, M. Categorising sheep activity using a tri-axial accelerometer. Comput. Electron. Agric. 2018, 145, 289–297. [Google Scholar] [CrossRef]
- Dutta, R.; Smith, D.; Rawnsley, R.; Bishop-Hurley, G.; Hills, J.; Timms, G.; Henry, D. Dynamic cattle behavioural classification using supervised ensemble classifiers. Comput. Electron. Agric. 2015, 111, 18–28. [Google Scholar] [CrossRef]
- Mansbridge, N.; Mitsch, J.; Bollard, N.; Ellis, K.; Kaler, J. Feature Selection and Comparison of Machine Learning Algorithms in Classification of Grazing and Rumination Behaviour in Sheep. Sensors 2018, 18, 3532. [Google Scholar] [CrossRef] [Green Version]
- Peng, Y.; Kondo, N.; Fujiura, T.; Suzuki, T.; Wulandari; Yoshioka, H. Classification of multiple cattle behavior patterns using a recurrent neural network with long short-term memory and inertial measurement units. Comput. Electron. Agric. 2019, 157, 247–253. [Google Scholar] [CrossRef]
- Martiskainen, P.; Järvinen, M.; SköN, J.P.; Tiirikainen, J.; Kolehmainen, M.; Mononen, J. Cow behaviour pattern recognition using a three-dimensional accelerometer and support vector machines. Appl. Anim. Behav. Sci. 2009, 119, 32–38. [Google Scholar] [CrossRef]
- Alvarenga, F.; Borges, I.; Oddy, V.H.; Dobos, R.C. Discrimination of biting and chewing behaviour in sheep using a tri-axial accelerometer. Comput. Electron. Agric. 2020, 168, 105051. [Google Scholar] [CrossRef]
- Rayas-Amor, A.A.; Morales-Almaráz, E.; Licona-Velázquez, G.; Vieyra-Alberto, R.; Lama, M. Triaxial accelerometers for recording grazing and ruminating time in dairy cows: An alternative to visual observations. J. Vet. Behav. 2017, 20, 102–108. [Google Scholar] [CrossRef]
- Riaboff, L.; Aubin, S.; Bédère, N.; Couvreur, S.; Plantier, G. Evaluation of pre-processing methods for the prediction of cattle behaviour from accelerometer data. Comput. Electron. Agric. 2019, 165, 104961. [Google Scholar] [CrossRef]
- Leiber, F.; Holinger, M.; Zehner, N.; Dorn, K.; Probst, J.K.; Neff, A.S. Intake estimation in dairy cows fed roughage-based diets: An approach based on chewing behaviour measurements. Appl. Anim. Behav. Sci. 2016, 185, 9–14. [Google Scholar] [CrossRef]
- Ungar, E.D.; Rutter, S.M. Classifying cattle jaw movements: Comparing IGER Behaviour Recorder and acoustic techniques. Appl. Anim. Behav. Sci. 2006, 98, 11–27. [Google Scholar] [CrossRef]
- Benson, L.C.; Clermont, C.A.; Osis, S.T.; Kobsar, D.; Ferber, R. Classifying Running Speed Conditions Using a Single Wearable Sensor: Optimal Segmentation and Feature Extraction Methods. J. Biomech. 2018, 71, 94–99. [Google Scholar] [CrossRef]
- Oshima, Y.; Kawaguchi, K.; Tanaka, S.; Ohkawara, K.; Hikihara, Y.; Ishikawa-Takata, K.; Tabata, I. Classifying household and locomotive activities using a triaxial accelerometer. Gait Posture 2010, 31, 370–374. [Google Scholar] [CrossRef] [PubMed]
- Riaboff, L.; Poggi, S.; Madouasse, A.; Couvreur, S.; Plantier, G. Development of a methodological framework for a robust prediction of the main behaviours of dairy cows using a combination of machine learning algorithms on accelerometer data. Comput. Electron. Agric. 2020, 169, 10517. [Google Scholar] [CrossRef]
- Liu, X.Y.; Liang, Y.; Wang, S.; Yang, Z.Y.; Ye, H.S. A Hybrid Genetic Algorithm with Wrapper-Embedded Approaches for Feature Selection. IEEE Access 2018, 6, 22863–22874. [Google Scholar] [CrossRef]
- Chen, C.; Tsai, Y.; Chang, F.; Lin, W. Ensemble feature selection in medical datasets: Combining filter, wrapper, and embedded feature selection results. Expert Syst. 2020, 37, e12553. [Google Scholar] [CrossRef]
- Zheng, H.; Yuan, J.; Chen, L. Short-Term Load Forecasting Using EMD-LSTM Neural Networks with a Xgboost Algorithm for Feature Importance Evaluation. Energies 2017, 10, 1168. [Google Scholar] [CrossRef] [Green Version]
- Torlay, L.; Perrone-Bertolotti, M.; Thomas, E.; Baciu, M. Machine learning–XGBoost analysis of language networks to classify patients with epilepsy. Brain Inform. 2017, 4, 159–169. [Google Scholar] [CrossRef]
- Bielecki, T.R.; Jakubowski, J.; Niewgowski, M. Intricacies of dependence between components of multivariate Markov chains: Weak Markov consistency and weak Markov copulae. Electron. J. Probab. 2013, 18, 1–21. [Google Scholar] [CrossRef]
- Ledezma, A.; Aler, R.; Sanchis, A.; Borrajo, D. GA-stacking: Evolutionary stacked generalization. Intell. Data Anal. 2010, 14, 89–119. [Google Scholar] [CrossRef] [Green Version]
- Yang, P.; Li, Y.; Zang, Y. Detecting DNS Covert Channels Using Stacking Model. China Commun. 2020, 17, 183–194. [Google Scholar] [CrossRef]
- Andriamandroso, L.H.A.; Frédéric, L.; Yves, B.; Eric, F.; Isabelle, D.; Bernard, H.; Pierre, D.; Guillaume, B.; Yannick, B.; Jérôme, B. Development of an open-source algorithm based on inertial measurement units (IMU) of a smartphone to detect cattle grass intake and ruminating behaviors. Comput. Electron. Agric. 2017, 139, 126–137. [Google Scholar] [CrossRef]
- Giovanetti, V.; Decandia, M.; Molle, G.; Acciaro, M.; Mameli, M.; Cabiddu, A.; Cossu, R.; Serra, M.G.; Manca, C.; Rassu, S.P.G.; et al. Automatic classification system for grazing, ruminating and resting behaviour of dairy sheep using a tri-axial accelerometer. Livest. Sci. 2016, 196, 42–48. [Google Scholar] [CrossRef]
- Rombach, M.; Münger, A.; Niederhauser, J.; Südekum, K.-H.; Schori, F. Evaluation and validation of an automatic jaw movement recorder (RumiWatch) for ingestive and rumination behaviors of dairy cows during grazing and supplementation. J. Dairy Sci. 2018, 101, 2463–2475. [Google Scholar] [CrossRef] [PubMed]
- Chelotti, J.O.; Vanrell, S.R.; Galli, J.R.; Giovanini, L.L.; Rufiner, H.L. A pattern recognition approach for detecting and classifying jaw movements in grazing cattle. Comput. Electron. Agric. 2018, 145, 83–91. [Google Scholar] [CrossRef]
- McVey, C.; Hsieh, U.; Manriquez, D.; Pinedo, P.; Horback, K. Livestock Informatics Toolkit: A Case Study in Visually Characterizing Complex Behavioral Patterns across Multiple Sensor Platforms, Using Novel Unsupervised Machine Learning and Information Theoretic Approaches. Sensors 2022, 22, 1. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Abbreviation | Full Name | Description | |
|---|---|---|---|
| 1 | Average | ||
| 2 | Variance (var) | ||
| 3 | Standard deviation (SD) | ||
| 4 | Minimum | The minimum value of data in a certain window size | |
| 5 | Maximum | The maximum value of data in a certain window size | |
| 6 | Range | ||
| 7 | Median | The median value of data in a certain window size | |
| 8 | First quartile | The first quartile of data in a certain window size | |
| 9 | Third quartile | The third quartile of data in a certain window size | |
| 10 | Interquartile range | ||
| 11 | Root mean square | ||
| 12 | Skewness | ||
| 13 | Kurtosis | ||
| 14 | Average intensity | ||
| 15 | Movement variation | ||
| 16 | Signal magnitude area |
| ID of Cows | Measured FIR, g/min |
|---|---|
| 1 | 274 ± 75 |
| 2 | 216 ± 193 |
| 3 | 226 ± 195 |
| 4 | 246 ± 51 |
| 5 | 114 ± 49 |
| 6 | 126 ± 84 |
| 7 | 129 ± 64 |
| 8 | 212 ± 92 |
| 9 | 192 ± 102 |
| 10 | 162 ± 85 |
| 11 | 93 ± 29 |
| 12 | 171 ± 38 |
| 13 | 210 ± 32 |
| Mean | 190 ± 89 |
| Window Size | Evaluation Factors | Only XGB Applied for Classification | XGB + HMM–Viterbi Applied for Classification | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Other | Ing-Che 1 | Ingesting | Chewing | WM | Other | Ing-Che | Ingesting | Chewing | WM | ||
| Precision | 0.95 | 0.82 | 0.84 | 0.92 | 0.93 | 1.00 | 1.00 | 0.96 | 0.99 | 0.99 | |
| 10 s | Recall | 0.97 | 0.43 | 0.89 | 0.86 | 0.93 | 0.99 | 1.00 | 0.99 | 0.98 | 0.99 |
| F1-score | 0.96 | 0.56 | 0.87 | 0.89 | 0.93 | 1.00 | 1.00 | 0.97 | 0.99 | 0.99 | |
| Behaviors | Window Size | ||||
|---|---|---|---|---|---|
| 1 s | 3 s | 5 s | 7 s | 10 s | |
| Ingesting | 5247 | 4824 (8.06%) 1 | 4412 (15.91%) | 4023 (23.33%) | 3495 (33.39%) |
| Chewing | 7682 | 7196 (6.33%) | 6720 (12.52%) | 6280 (18.25%) | 5685 (26.00%) |
| Ingesting–chewing | 1228 | 1194 (2.77%) | 1161 (5.46%) | 1129 (8.06%) | 1081 (11.97%) |
| Other | 11,273 | 11,047 (2.00%) | 10,829 (3.94%) | 10,624 (5.76%) | 10,342 (8.26%) |
| Window Size | Evaluation Factors | XGB + HMM–Viterbi Applied for Classification | ||||
|---|---|---|---|---|---|---|
| Other | Ing-Che 1 | Ingesting | Chewing | WM 2 | ||
| 3 s | Precision | 0.90 | 1.00 | 0.87 | 0.96 | 0.91 |
| Recall | 0.97 | 0.37 | 0.77 | 0.88 | 0.91 | |
| F1-score | 0.93 | 0.54 | 0.82 | 0.92 | 0.91 | |
| 5 s | Precision | 0.93 | 1.00 | 0.90 | 0.97 | 0.94 |
| Recall | 0.98 | 0.75 | 0.83 | 0.93 | 0.94 | |
| F1-score | 0.95 | 0.86 | 0.86 | 0.95 | 0.94 | |
| 7 s | Precision | 0.99 | 1.00 | 0.94 | 0.97 | 0.98 |
| Recall | 0.98 | 0.93 | 0.96 | 0.98 | 0.98 | |
| F1-score | 0.99 | 0.96 | 0.95 | 0.98 | 0.98 | |
| 10 s | Precision | 1.00 | 1.00 | 0.96 | 0.99 | 0.99 |
| Recall | 0.99 | 1.00 | 0.99 | 0.98 | 0.99 | |
| F1-score | 1.00 | 1.00 | 0.97 | 0.99 | 0.99 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ding, L.; Lv, Y.; Jiang, R.; Zhao, W.; Li, Q.; Yang, B.; Yu, L.; Ma, W.; Gao, R.; Yu, Q. Predicting the Feed Intake of Cattle Based on Jaw Movement Using a Triaxial Accelerometer. Agriculture 2022, 12, 899. https://doi.org/10.3390/agriculture12070899
Ding L, Lv Y, Jiang R, Zhao W, Li Q, Yang B, Yu L, Ma W, Gao R, Yu Q. Predicting the Feed Intake of Cattle Based on Jaw Movement Using a Triaxial Accelerometer. Agriculture. 2022; 12(7):899. https://doi.org/10.3390/agriculture12070899
Chicago/Turabian StyleDing, Luyu, Yang Lv, Ruixiang Jiang, Wenjie Zhao, Qifeng Li, Baozhu Yang, Ligen Yu, Weihong Ma, Ronghua Gao, and Qinyang Yu. 2022. "Predicting the Feed Intake of Cattle Based on Jaw Movement Using a Triaxial Accelerometer" Agriculture 12, no. 7: 899. https://doi.org/10.3390/agriculture12070899