
Linear Contrails Detection, Tracking and Matching with Aircraft Using Geostationary Satellite and Air Traffic Data

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Data Acquisition and Processing
2.1. Data Acquisition
2.2. Data Processing
2.2.1. Training a Contrail Detection Algorithm
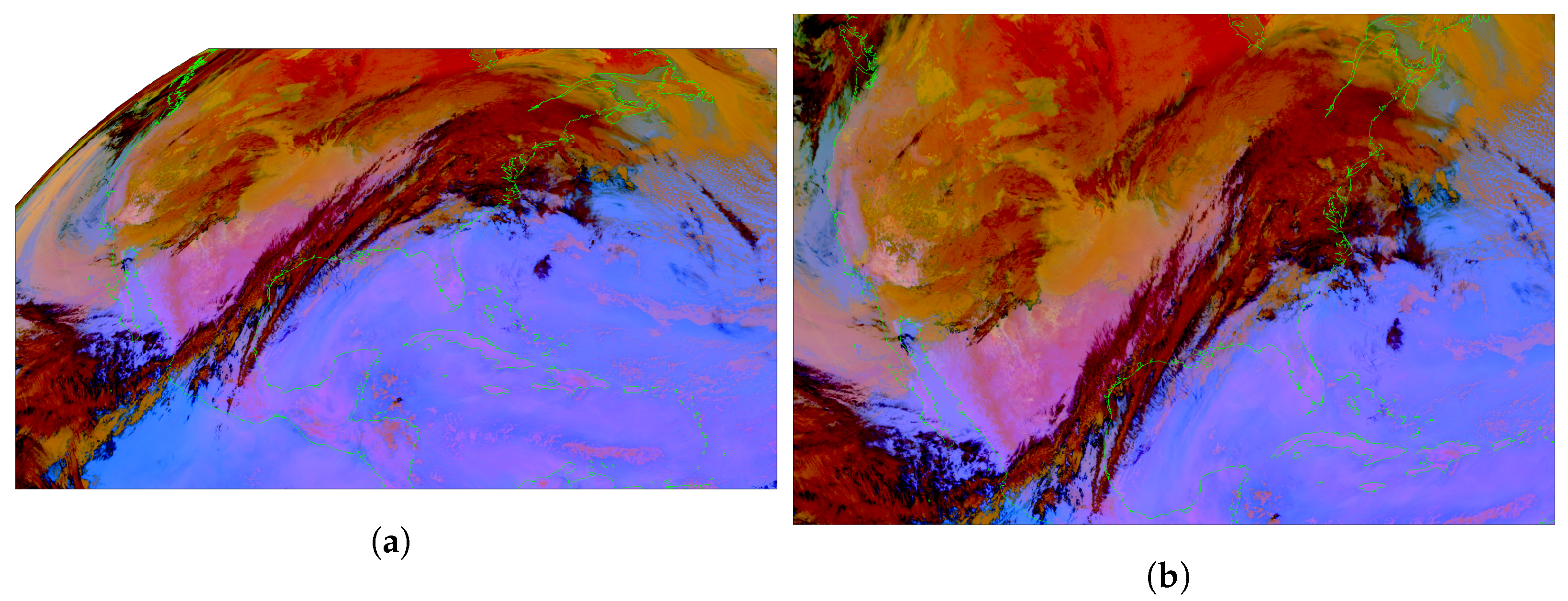
2.2.2. Inference on Real Images, Projection in Geographic Coordinates and Parallax Correction
2.2.3. Preparing the Air Traffic Data
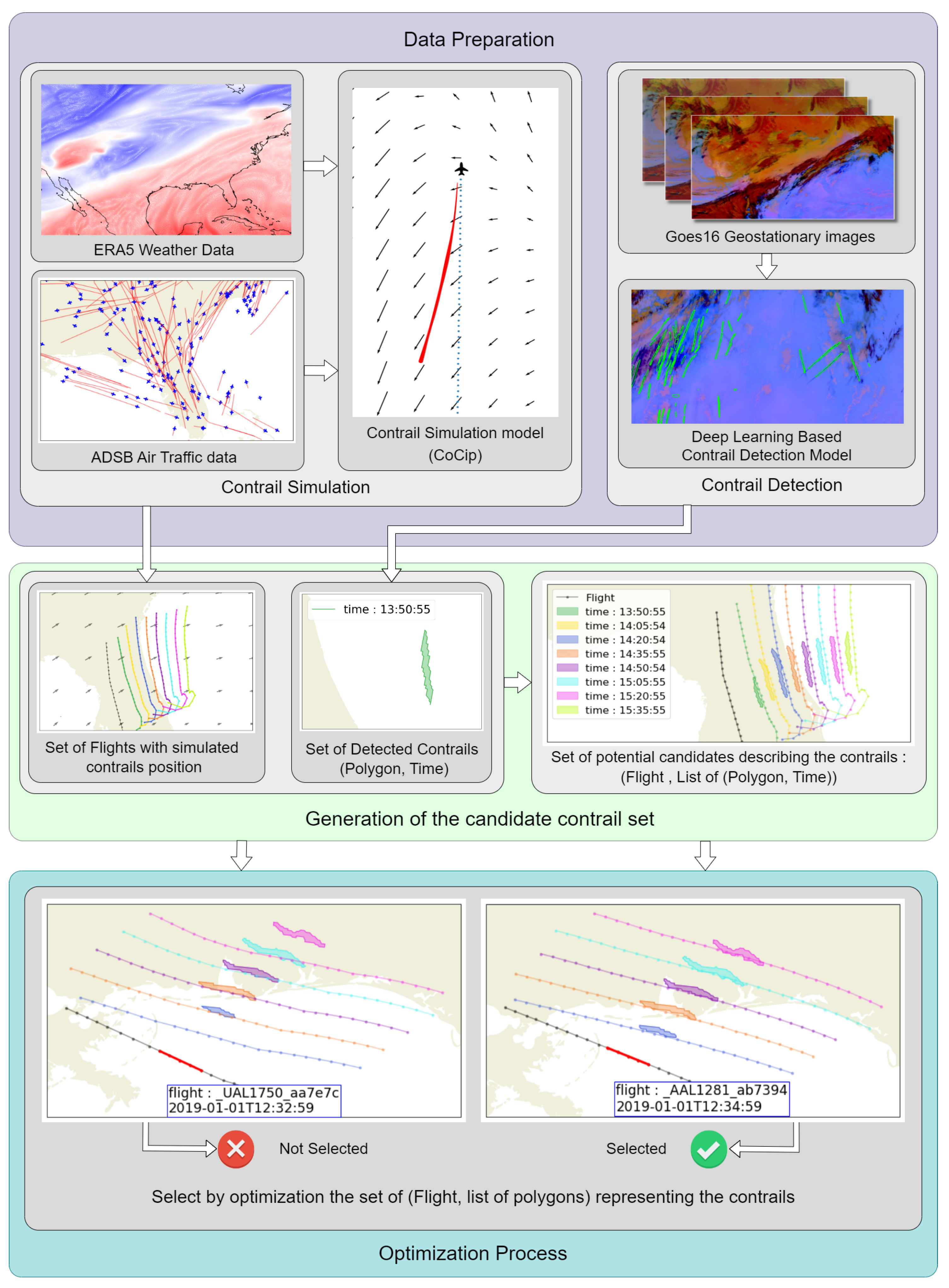
3. Methodology
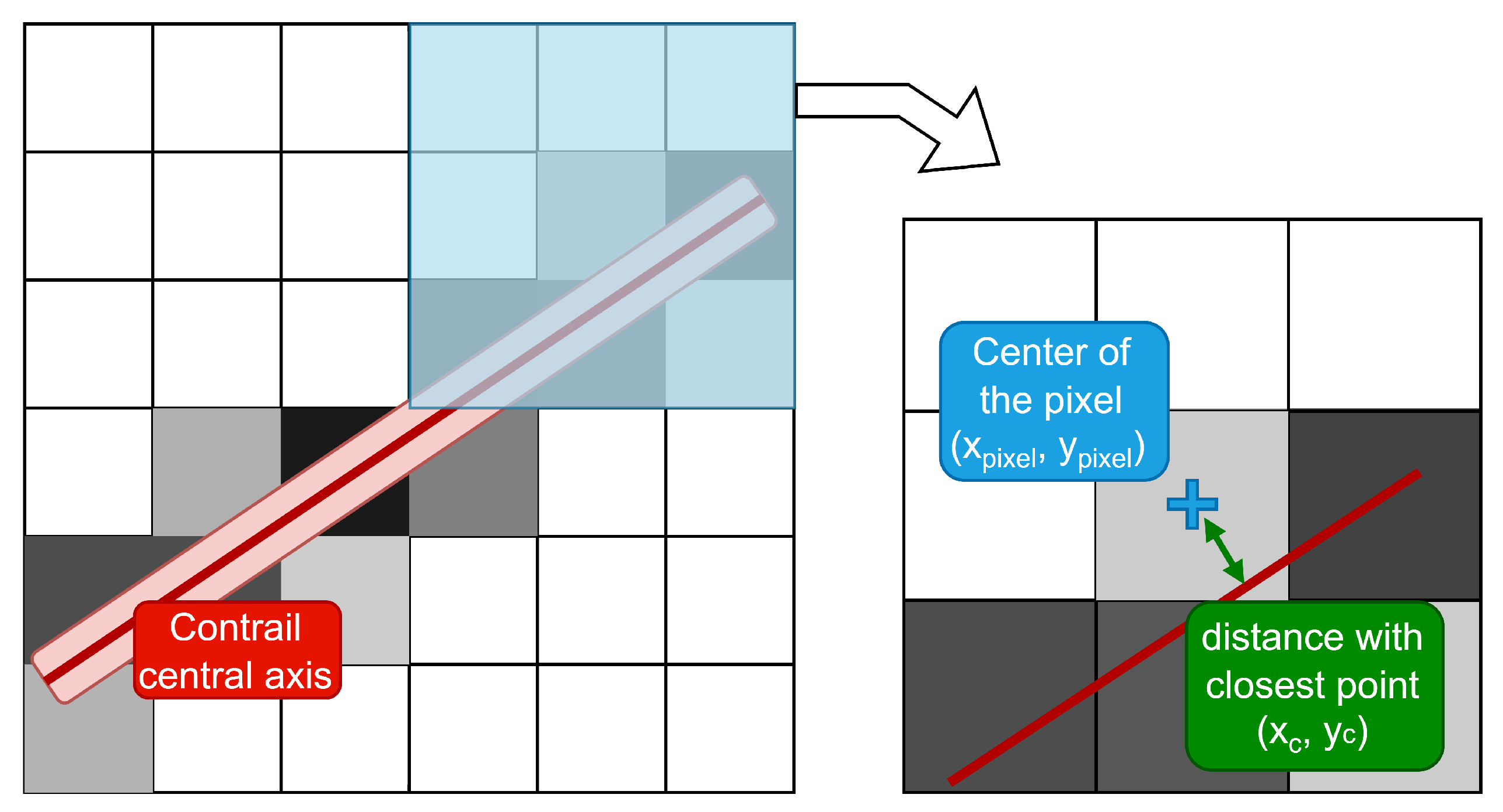
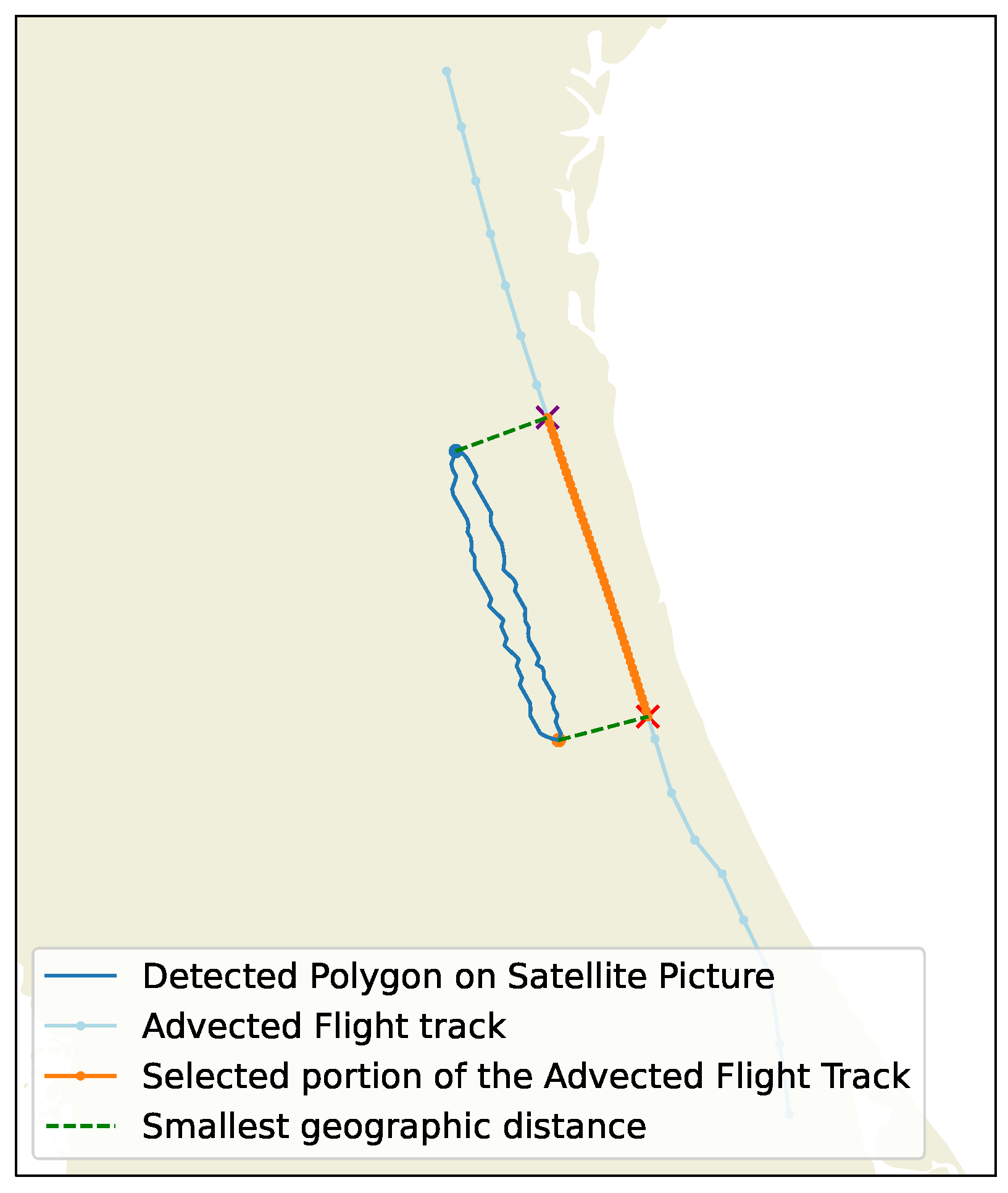
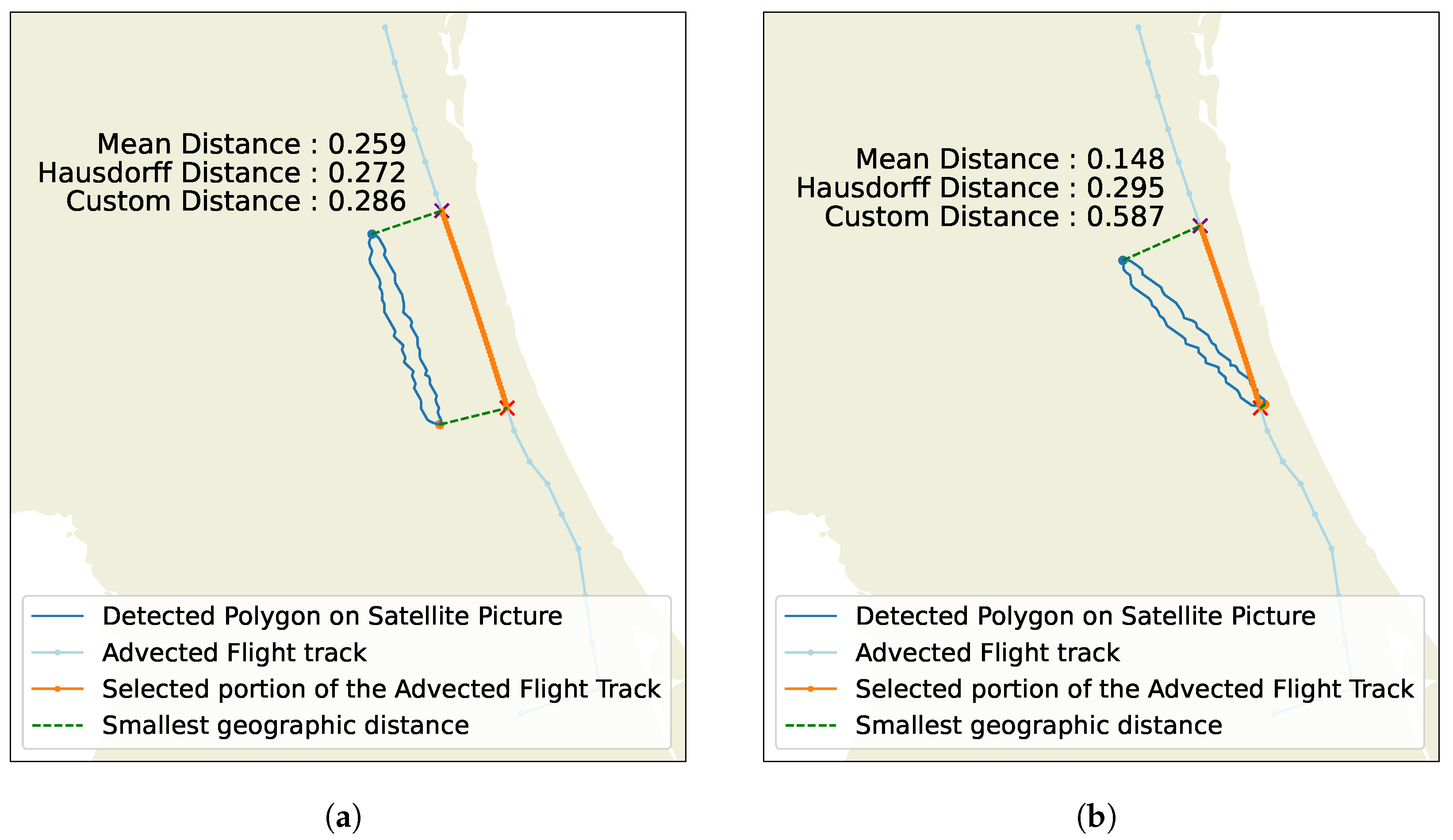
3.1. Single Frame Flights-Contrail Matching
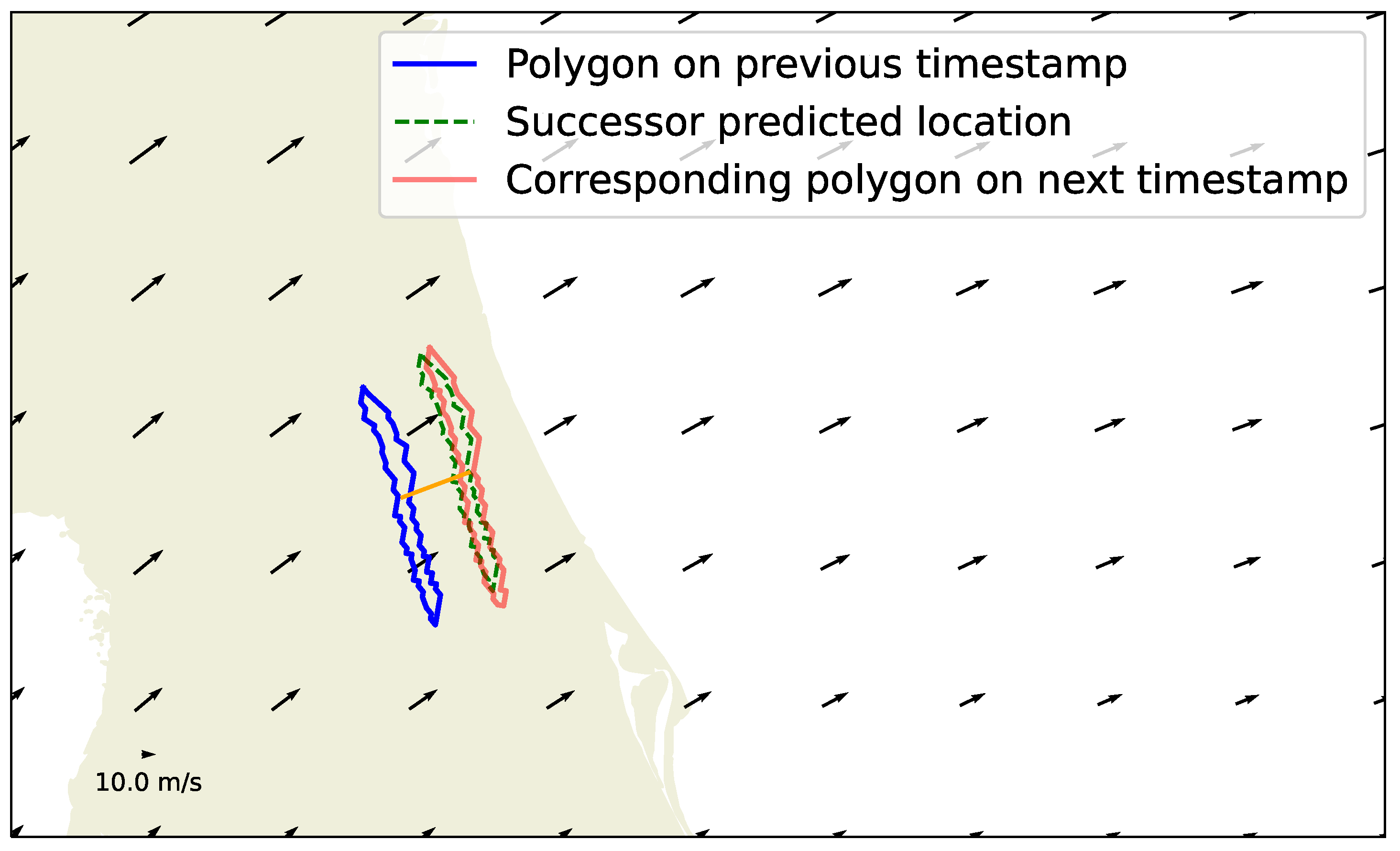
3.2. Tracking of Contrails Using Time Information
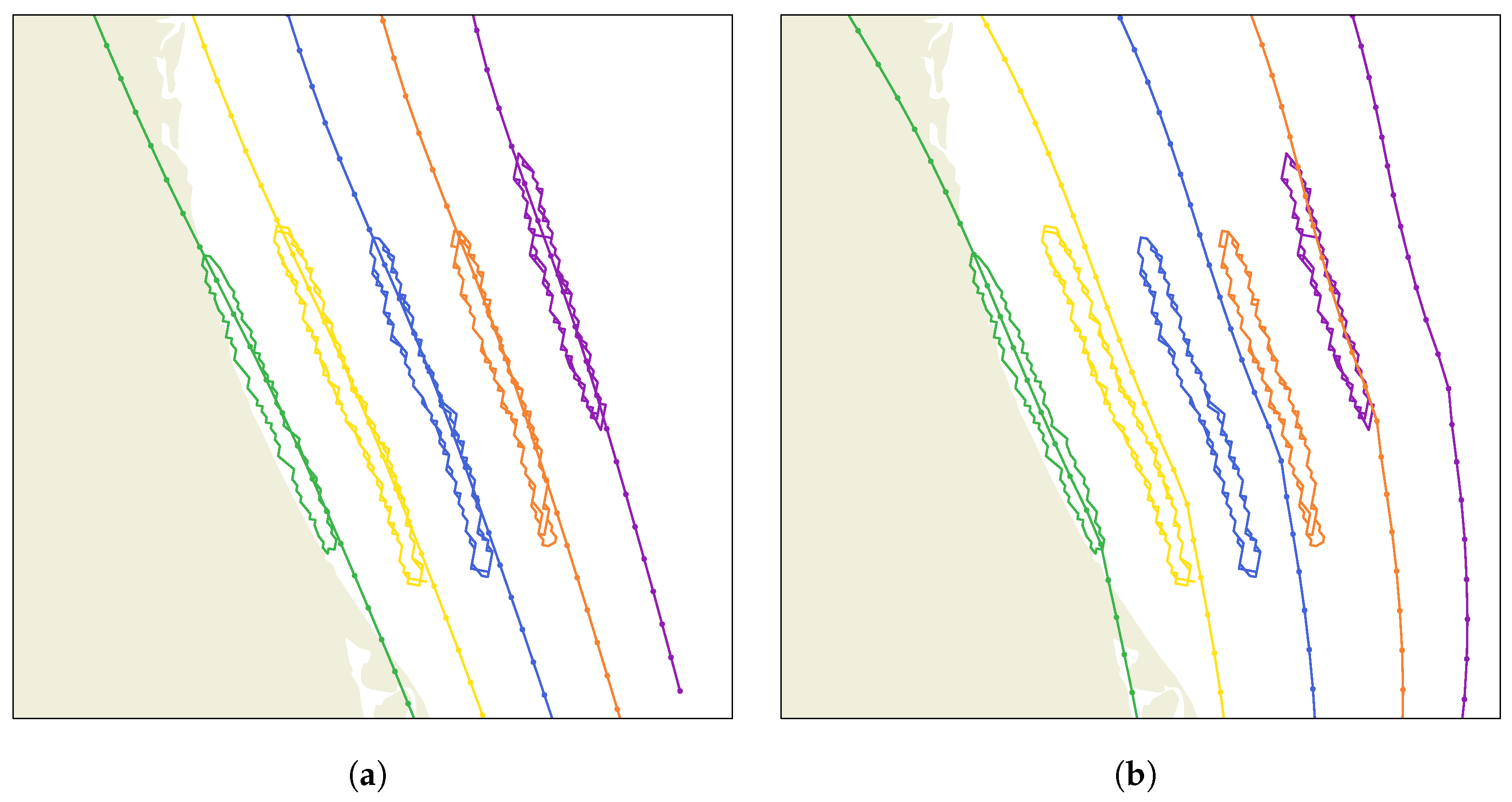
3.3. Combining Both Approaches
| Algorithm 1 Generation of a chain of polygons from a candidate flight and a first polygon. |
|
| Algorithm 2 Generation and Evaluation the list of possible contrails chains. |
|
4. Case Study
4.1. Results on Contrail Tracking
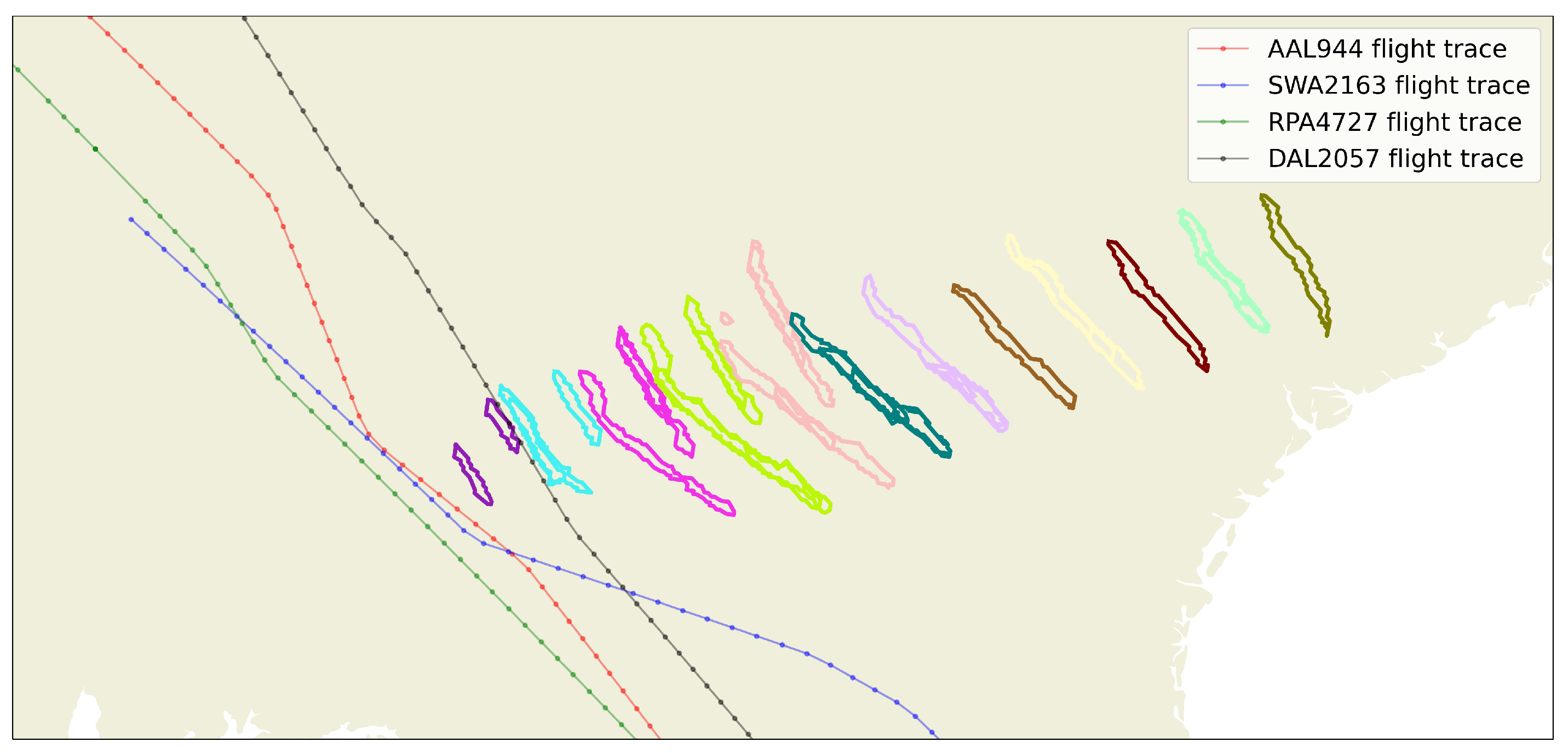
4.1.1. Description of the Case Study
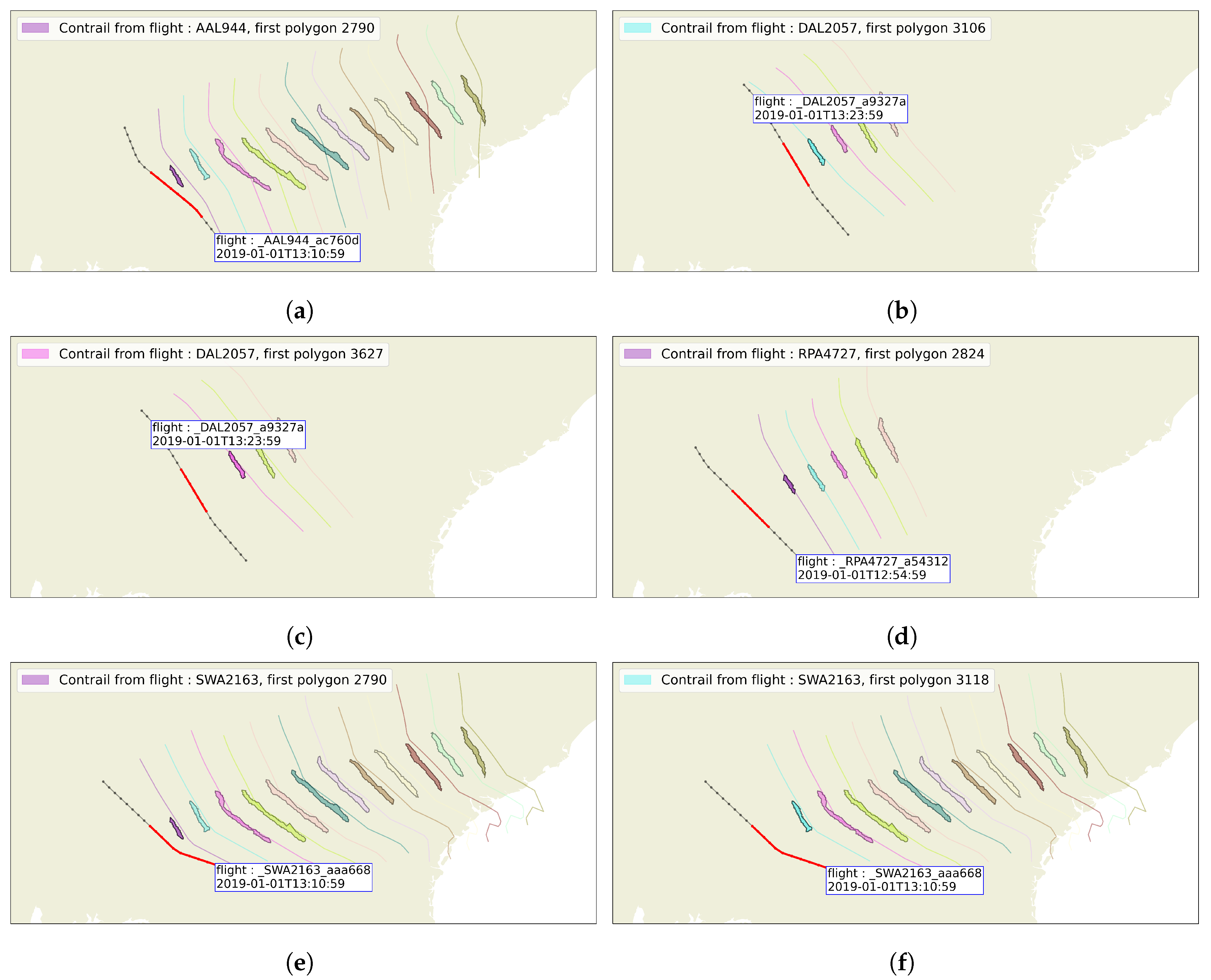
4.1.2. Isolated Contrails: High Confidence on a Small Set of Examples
4.1.3. Contrails Forming in an Empty Area
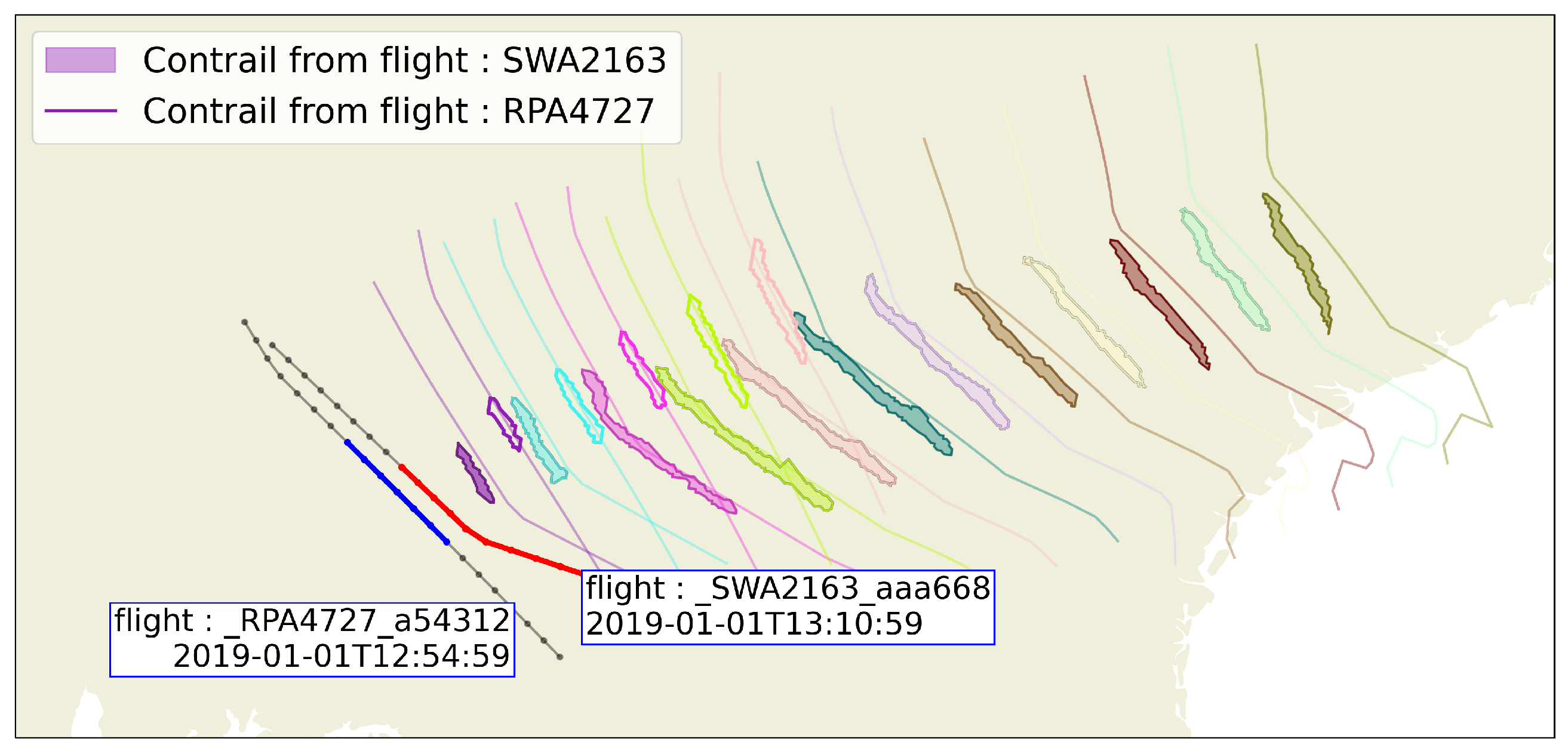
4.1.4. Performance on Difficult Situations
4.2. Limitations
4.2.1. Detection Based Tracking Algorithm
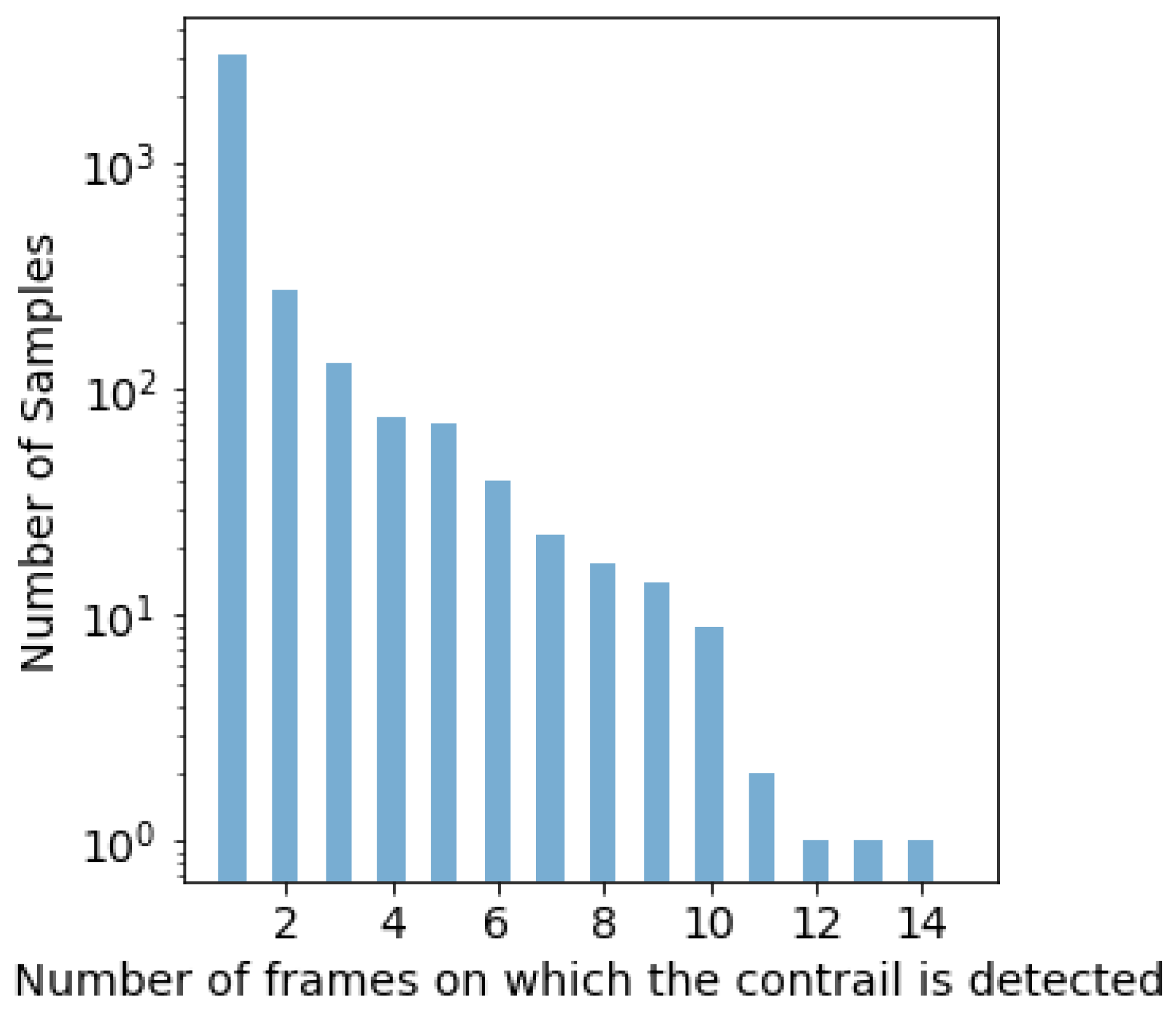
4.2.2. Lack of Confidence for Short Lived Contrails
4.2.3. Wind Uncertainties over Large Periods of Time
4.2.4. Lack of Validation Data
5. Conclusions and Future Work
5.1. Conclusions
5.2. Future Work
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lee, D.S.; Fahey, D.W.; Skowron, A.; Allen, M.R.; Burkhardt, U.; Chen, Q.; Doherty, S.J.; Freeman, S.; Forster, P.M.; Fuglestvedt, J.; et al. The contribution of global aviation to anthropogenic climate forcing for 2000 to 2018. Atmos. Environ. 2021, 244, 117834. [Google Scholar] [CrossRef] [PubMed]
- Schumann, U. A contrail cirrus prediction model. Geosci. Model Dev. 2012, 5, 543–580. [Google Scholar] [CrossRef] [Green Version]
- Burkhardt, U.; Kärcher, B. Global radiative forcing from contrail cirrus. Nat. Clim. Chang. 2011, 1, 54–58. [Google Scholar] [CrossRef] [Green Version]
- Chen, C.C.; Gettelman, A. Simulated radiative forcing from contrails and contrail cirrus. Atmos. Chem. Phys. 2013, 13, 12525–12536. [Google Scholar] [CrossRef] [Green Version]
- Frömming, C.; Volker, G.; Jockel, P.; Brinkop, S.; Dietmüller, S.; Garny, H.; Ponater, M.; Tsati, E.; Matthes, S. Climate cost functions as a basis for climate optimized flight trajectories. In Proceedings of the 10th USA/Europe Air Traffic Management Research and Development Seminar, ATM 2013, Chicago, IL, USA, 10–13 June 2013. [Google Scholar] [CrossRef]
- Yin, F.; Grewe, V.; Castino, F.; Rao, P.; Matthes, S.; Dahlmann, K.; Dietmüller, S.; Frömming, C.; Yamashita, H.; Peter, P.; et al. Predicting the climate impact of aviation for en-route emissions: The algorithmic climate change function submodel ACCF 1.0 of EMAC 2.53. Geosci. Model Dev. Discuss. 2023, 16, 3313–3334. [Google Scholar] [CrossRef]
- Mannstein, H.; Meyer, R.; Wendling, P. Operational detection of contrails from NOAA-AVHRR-data. Int. J. Remote. Sens. 1999, 20, 1641–1660. [Google Scholar] [CrossRef]
- Kulik, L. Satellite-Based Detection of Contrails Using Deep Learning. Master’s Thesis, Massachusetts Institute of Technology, Department of Aeronautics and Astronautics, Cambridge, MA, USA, 2019. [Google Scholar]
- Knapp, K.R.; Wilkins, S.L. Gridded satellite (GridSat) GOES and CONUS data. Earth Syst. Sci. Data 2018, 10, 1417–1425. [Google Scholar] [CrossRef] [Green Version]
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional networks for biomedical image segmentation. In Medical Image Computing and Computer-Assisted Intervention–MICCAI 2015: 18th International Conference, Munich, Germany, 5–9 October 2015, Proceedings, Part III 18; Springer: Berlin/Heidelberg, Germany, 2015; pp. 234–241. [Google Scholar] [CrossRef] [Green Version]
- Meijer, V.R.; Kulik, L.; Eastham, S.D.; Allroggen, F.; Speth, R.L.; Karaman, S.; Barrett, S.R. Contrail coverage over the United States before and during the COVID-19 pandemic. Environ. Res. Lett. 2022, 17, 034039. [Google Scholar] [CrossRef]
- Vazquez-Navarro, M.; Mannstein, H.; Mayer, B. An automatic contrail tracking algorithm. Atmos. Meas. Tech. 2010, 3, 1089–1101. [Google Scholar] [CrossRef] [Green Version]
- Simorgh, A.; Soler, M.; González-Arribas, D.; Matthes, S.; Grewe, V.; Dietmüller, S.; Baumann, S.; Yamashita, H.; Yin, F.; Castino, F.; et al. A Comprehensive Survey on Climate Optimal Aircraft Trajectory Planning. Aerospace 2022, 9, 146. [Google Scholar] [CrossRef]
- Gierens, K.; Matthes, S.; Rohs, S. How well can persistent contrails be predicted? Aerospace 2020, 7, 169. [Google Scholar] [CrossRef]
- Agarwal, A.; Meijer, V.R.; Eastham, S.D.; Speth, R.L.; Barrett, S.R. Reanalysis-driven simulations may overestimate persistent contrail formation by 100%–250%. Environ. Res. Lett. 2022, 17, 014045. [Google Scholar] [CrossRef]
- Wang, Z.; Bugliaro, L.; Jurkat-Witschas, T.; Heller, R.; Burkhardt, U.; Ziereis, H.; Dekoutsidis, G.; Wirth, M.; Groß, S.; Kirschler, S.; et al. Observations of microphysical properties and radiative effects of a contrail cirrus outbreak over the North Atlantic. Atmos. Chem. Phys. 2023, 23, 1941–1961. [Google Scholar] [CrossRef]
- Schmit, T.J.; Griffith, P.; Gunshor, M.M.; Daniels, J.M.; Goodman, S.J.; Lebair, W.J. A Closer Look at the ABI on the GOES-R Series. Bull. Am. Meteorol. Soc. 2017, 98, 681–698. [Google Scholar] [CrossRef]
- Schäfer, M.; Strohmeier, M.; Lenders, V.; Martinovic, I.; Wilhelm, M. Bringing up OpenSky: A large-scale ADS-B sensor network for research. In Proceedings of the IPSN-14 Proceedings of the 13th International Symposium on Information Processing in Sensor Networks, Berlin, Germany, 15–17 April 2014; pp. 83–94. [Google Scholar] [CrossRef]
- Hersbach, H.; Bell, B.; Berrisford, P.; Biavati, G.; Horányi, A.; Sabater, J.M.; Nicolas, J.; Peubey, C.; Radu, R.; Rozum, I.; et al. ERA5 Hourly Data on Pressure Levels from 1959 to Present. Copernicus Climate Change Service (C3S) Climate Data Store (CDS), 2018. Available online: https://doi.org/10.24381/cds.adbb2d47 (accessed on 10 April 2023).
- Teoh, R.; Schumann, U.; Gryspeerdt, E.; Shapiro, M.; Molloy, J.; Koudis, G.; Voigt, C.; Stettler, M.E.J. Aviation contrail climate effects in the North Atlantic from 2016 to 2021. Atmos. Chem. Phys. 2022, 22, 10919–10935. [Google Scholar] [CrossRef]
- Boulanger, D.; Bundke, U.; Gallagher, M.; Gerbig, C.; Hermann, M.; Nédélec, P.; Rohs, S.; Sauvage, B.; Ziereis, H.; Thouret, V.; et al. IAGOS Final Quality Controlled Observational Data L2—Time series, Aeris [Data Set], 2018. Available online: https://doi.org/10.25326/06 (accessed on 10 April 2023).
- McCloskey, K.; Geraedts, S.; Jackman, B. A Human-Labeled Landsat-8 Contrails Dataset. Tackling Climate Change with Machine Learning Workshop at ICML 2021. 2021. Available online: https://www.climatechange.ai/papers/icml2021/2 (accessed on 10 April 2023).
- Sun, J.; Hoekstra, J.M.; Ellerbroek, J. OpenAP: An open-source aircraft performance model for air transportation studies and simulations. Aerospace 2020, 7, 104. [Google Scholar] [CrossRef]
- He, K.; Gkioxari, G.; Dollár, P.; Girshick, R. Mask r-cnn. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2961–2969. [Google Scholar] [CrossRef]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster r-cnn: Towards real-time object detection with region proposal networks. Adv. Neural Inf. Process. Syst. 2015, 28, 1137–1149. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lin, T.Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Dollár, P.; Zitnick, C.L. Microsoft coco: Common objects in context. In Computer Vision–ECCV 2014: 13th European Conference, Zurich, Switzerland, 6–12 September 2014, Proceedings, Part V 13; Springer: Berlin/Heidelberg, Germany, 2014; pp. 740–755. [Google Scholar] [CrossRef] [Green Version]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 580–587. [Google Scholar] [CrossRef] [Green Version]
- Xie, S.; Girshick, R.; Dollar, P.; Tu, Z.; He, K. Aggregated Residual Transformations for Deep Neural Networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 1492–1500. [Google Scholar] [CrossRef] [Green Version]
- Lin, T.Y.; Dollár, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature Pyramid Networks for Object Detection. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 936–944. [Google Scholar] [CrossRef] [Green Version]
- Schumann, U. On conditions for contrail formation from aircraft exhausts. Meteorol. Z. 1996, 5, 4–23. [Google Scholar] [CrossRef]






















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chevallier, R.; Shapiro, M.; Engberg, Z.; Soler, M.; Delahaye, D. Linear Contrails Detection, Tracking and Matching with Aircraft Using Geostationary Satellite and Air Traffic Data. Aerospace 2023, 10, 578. https://doi.org/10.3390/aerospace10070578
Chevallier R, Shapiro M, Engberg Z, Soler M, Delahaye D. Linear Contrails Detection, Tracking and Matching with Aircraft Using Geostationary Satellite and Air Traffic Data. Aerospace. 2023; 10(7):578. https://doi.org/10.3390/aerospace10070578
Chicago/Turabian StyleChevallier, Rémi, Marc Shapiro, Zebediah Engberg, Manuel Soler, and Daniel Delahaye. 2023. "Linear Contrails Detection, Tracking and Matching with Aircraft Using Geostationary Satellite and Air Traffic Data" Aerospace 10, no. 7: 578. https://doi.org/10.3390/aerospace10070578