
Data-Based Security Fault Tolerant Iterative Learning Control under Denial-of-Service Attacks


1
Shandong Key Laboratory of Industrial Control Technology, School of Automation, Qingdao University, Qingdao 266071, China
2
Institute of Advanced Technology, Nanjing University of Posts and Telecommunications, Nanjing 210000, China
3
School of Computer Science and Technology, Qilu University of Technology (Shandong Academy of Sciences), Jinan 250353, China
*
Author to whom correspondence should be addressed.
Actuators 2022, 11(7), 178; https://doi.org/10.3390/act11070178
Submission received: 7 June 2022
/
Revised: 22 June 2022
/
Accepted: 24 June 2022
/
Published: 26 June 2022
(This article belongs to the Special Issue Sensor and Actuator Attacks of Cyber-Physical Systems)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:This paper mainly studies the data-based security fault tolerant iterative learning control (SFTILC) problem of nonlinear networked control systems (NCSs) under sensor failures and denial-of-service (DoS) attacks. Firstly, the radial basis function neural network (RBFNN) is used to approximate the sensor failure function and a DoS attack compensation mechanism is proposed in the iterative domain to lessen the impact of DoS attacks. Then, using the dynamic linearization technology, the nonlinear system considering failures and network attacks is transformed into a linear data model. Further, based on the designed linearization model, a new data-based SFTILC algorithm is designed to ensure the satisfactory tracking performance of the system. This process only uses the input and output data of the system, and the stability of the system is proved by using the compression mapping principle. Finally, a digital simulation is used to demonstrate the effectiveness of the proposed SFTILC algorithm.
1. Introduction
As the network technology develops, traditional local control systems (LCSs) have been gradually replaced by network control systems (NCSs) [1,2,3,4]. NCSs are integrated by controllers, sensors, actuators, and network transmission channels. NCSs receive sensor signals of equipment through networks and send control signals to control the equipment, so that remote control tasks can be completed accordingly. In NCSs, the separation of controllers and equipment is one of the most important characteristics of NCSs, but it requires a large amount of data transmission, and the existence of data also stimulates the research of data-based control (DDC) [5,6,7].
It is more and more difficult to identify the model of systems, and the control problem becomes more difficult and unrealistic by using the traditional model-based control theory. Therefore, DDC theory began to be researched. There have had many DDC methods in the existing literature, such as PID control, model free adaptive control (MFAC) [8], iterative learning control (ILC) [9,10,11,12], iterative feedback tuning (IFT) [13] and so on. MFAC and ILC are proposed to solve the control problem of nonlinear systems by directly applying the I/O data of the controlled systems. The paper [14] proposed a new MFAC method for discrete-time single input single output nonlinear systems combined with radial basis function neural networks. In [15], the bounded input–output stability and tracking performance of full format dynamic linearized MFAC were strictly proved by using the compression mapping principle. In [16], aiming at the problem of driverless vehicle ground heading control, an MFAC method based on the adaptive forgetting factor was proposed. When the control task is repeated, the system shows the same behavior. For the ILC method of the repeated process, when constructing the current algorithm, the information of the last iteration time stored by storage devices is used to correct the current control input, so as to improve the error accuracy of the system cycle process. In [17], the contraction mapping (CM)-based method was suitable for some robust ILCs that are non-competitive with uncertainties, especially for power system models. In order to ensure the robust convergence of iterative learning control designs, the norm condition was proposed, and the learning gain matrix was determined by solving norm conditions. In [18], a class of multi-input and multi-output discrete linear systems was studied. Under the assumption that all iterative uncertainties were bounded, conditions to ensure the boundedness of all system trajectories and to ensure the convergence of tracking errors were given in [18]. In the presence of data quantization and DoS attacks, a quantized data-based iterative learning tracking control algorithm was proposed for a class of repetitive nonlinear systems in [19].
It is well-known that NCSs involve the transmission of data that are required by the control system through the network, while many network failures or network attacks exist in networks. Network attacks can be roughly divided into denial-of-service (DoS) [20,21,22] attacks, false data injection (FDI ) [23] attacks, and replay attacks. The basic goal of a DoS attack is to prevent the target network from providing regular service or resource access, as well as to cause the target system to become unresponsive or crash. In this way, NCSs cannot achieve the expected control objectives. Therefore, there has had much research on solving the impacts of DoS attacks in the existing literature. The consensus problem of linear multi-agent systems (MASs) under DoS attacks was investigated in [24]. The paper [25] studied the output tracking problem of distributed model-free adaptive control systems under DoS attacks. If the sensor in an NCS fails, it will also affect the accuracy of data transmission. Inaccurate data measurement leads to that the controller can not well generate control inputs to control the controlled system, resulting in the system can not achieve the expected control objectives. For a class of continuous-time disturbed systems, the paper [26] provided an adaptive compensation technique against state-dependent and partly bounded actuator failures and disturbances. In [27], the author studied the distributed fault tolerance and resilient consensus of heterogeneous multi-agent systems under equipment failures and DoS attacks. Under DoS attacks, the problem of fault-tolerant MFAC for nonlinear networked control systems was investigated in [28]. The above research on fault tolerance is to design fault-tolerant control methods and prove the stability in the time domain. There are few research findings on ILC fault-tolerant control under the repeated operation NCSs. Therefore, we investigate the nonlinear repetitive NCSs under DoS attacks and fault-tolerant control in the iteration domain, which are prompted by the above descriptions. The contributions of this paper can be listed as:
- •
- The nonlinear system is transformed into a linear data model by using the dynamic linearization technology under failures and DoS attacks. Then, a new data-based security fault tolerant iterative learning control (SFTILC) algorithm is designed to ensure the tracking performance of the system under the DoS attack.
- •
- The radial basis function neural network (RBFNN) is used to approximate the sensor failure function. A DoS attack compensation mechanism is proposed in the iterative domain to lessen the impacts of DoS attacks.
The structure of this document is as follows. The preparation and explanation of the problem are described in Section 2. In Section 3, the design of a fault tolerant controller is presented. Section 4 provides the stability analysis. The simulations and conclusions are presented in Section 5 and Section 6, respectively.
2. Preliminaries and Problem Formulations
2.1. System Description
The nonlinear discrete-time single-input single-output system that repeatedly runs at finite time intervals is given as follows
where is the sampling time, is the number of iterations, and are the output and input signals of the system, respectively, and are two unknown positive integers, and is an unknown nonlinear scalar function.
2.2. Dynamic Linearization
To facilitate the later controller design, the following assumptions are made for the system (1).
Assumption 1.
The partial derivative of to is continuous.
Assumption 2.
System (1) satisfies the generalized Lipschitz condition along the iteration axis, namely, , if , the formula below applies
where , and is a constant.
Remark 1.
Assumptions 1 and 2 are reasonable in many actual situations. In the control system design, Assumption 1 is a typical constraint condition for generic nonlinear systems. Assumption 2 limits the system output change rate produced by the change of the control input along the iteration axis. Namely, a bounded input energy change should result in a finite output energy change.
Lemma 1.
For the nonlinear system (1) that meets both Assumptions 1 and 2, when , there is a time-varying pseudo partial derivative (PPD) so that system (1) can be transformed into the following linear data model
where . The proof of Lemma 1 is the same as that in [29].
3. Design Fault Tolerant Controller
3.1. Model Free Adaptive Iterative Learning Control
Considering the input cost function as follows
where is a weight coefficient and is the time-invariant desired output signal.
The optimal control rate is obtained by minimizing the cost function . In order to make the algorithm more general, the step factor is introduced and the following optimal control algorithm is obtained
Because are difficult to be measured in real systems, we need to estimate them by introducing the following performance function
where is an estimate of , and is a weight factor.
Minimize the performance function to get , similarly, in order to make the algorithm more general the step-size factor is introduced, then one can obtain
The above control algorithm is applied to the nominal system. However, in the practical networked control system, on the one hand, sensor failures will result in some deviations in the measurement data. On the other hand, the emergence of the network may bring cyber attacks. So, the above algorithm may not complete the tracking task well when these problems exist. Therefore, it seems necessary to design the secure fault-tolerant iterative learning control (SFTILC) algorithm under sensor failures and cyber attacks.
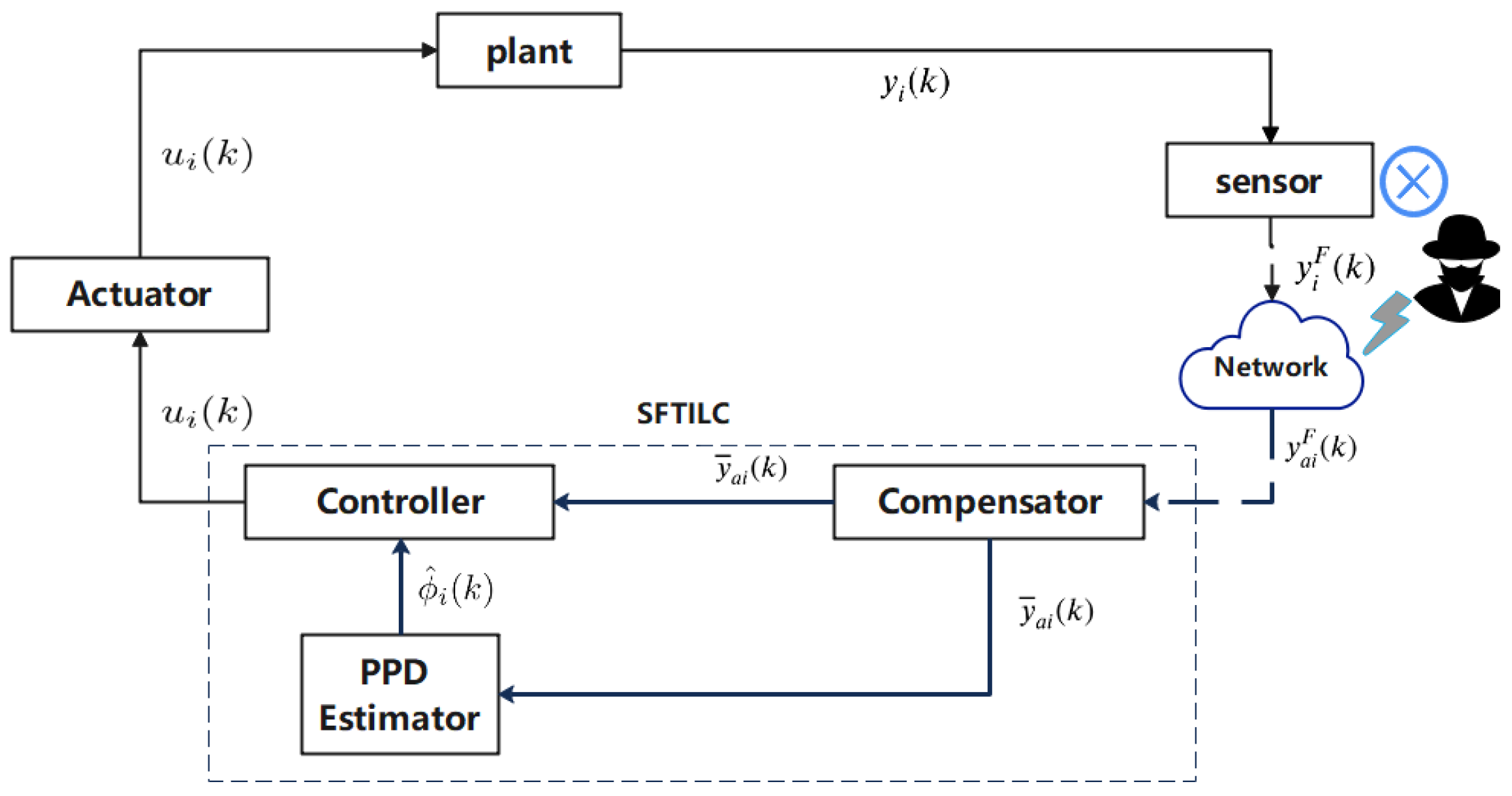
Figure 1 depicts the nonlinear NCS architecture under DoS attacks and sensor failures consideration.
3.2. Sensor Failure
According to Figure 1, when a fault occurs, the sensor measurement signal becomes to the following form
where is a fault function, which can be approximated using the radial basis function neural network (RBFNN), the details are given as
where is the ideal weight vector in the output layer, p is the RBFNN’s node number, and is the hidden layer’s basis function, which is a Gaussian function, and it can be represented as
where denotes the RBFNN’s center, denotes the RBFNN’s breadth for , is the RBFNN input.
In most cases, is not available, therefore, the following learning process is introduced to obtain it.
where stands for the projection operator, can be calculated by (18), can be defined in (17). Then is given as following, which has been employed in [30].
where and are the lower and the upper bounds of , respectively.
In the case of sensor failures, the nonlinear repetitive system is linearized dynamically by
where with p being the node number of RBFNN and is the upper bounds of .
3.3. Attack Compensation
When a network attacker launches DoS attacks, the output signal is expressed as follows
where obeys the Bernoulli distribution, denotes a failed DoS attack, whereas denotes a successful DoS attack. As a result, the probabilities are expressed as
To compensate for the impact of DoS attacks, the mechanism is designed as follows
Consider sensor failure and DoS attacks, the SFTILC algorithm is proposed as follows
For the convenience, the tracking error is defined as follows:
Problem 1.
This study aims to design the SFTILC algorithm to realize the mean-square bounded output tracking task of system (1) under the influence of sensor failures and DoS attacks, namely,
wherebis a constant, wheredenotes the expectation.
4. Stability Analysis
Theorem 1.
Proof.
The proof of Theorem 1 consists of two parts: the bounded PPD parameter estimation and the bounded result of the output tracking error.
Part I: Boundedness of the PPD parameter estimation
(i) When , , so is bounded.
(ii) When , the PPD estimation error is defined as
Taking the absolute value and expectation on both sides of (21), we can get
where , and , so
where and are constants.
By using the compressed mapping principle, we can get
so, converges to the following set
So far, the proof of the boundedness of is completed because is bounded, leading to also being bounded.
Part II: Tracking performance analysis
The boundedness of the PPD parameter estimation proved above can be used as a condition to prove the boundedness of the system tracking error.
Taking the absolute value and expectation on both sides of (29), we can get
In addition, generally because the energy of the equipment cannot be unlimited, the input increment is similarly bounded with . From (31)–(33) and (13), we can reduce (30) to the following inequality
where . Further, by using the principle of the compressed mapping, we can get
so, converges to the following set
Now, the proof of the boundedness of the tracking error is completed. □
5. Simulation Results
The nonlinear repetitive operation system described below is used
The desired output is given as
The control input and control output have their initial values with and , respectively, and the estimated values of the PPD parameters are set to . The controller parameters are selected as and . The successful transmission rate is selected to be .
Consider the actual sensor fault function as
where . In addition, the initial value of the hazard function is set to .
In this paper, the learning rate of the RBFNN is set to , the RBFNN input defined as . The initial value of the Gaussian function is set to and
The input layer weight vector is set to
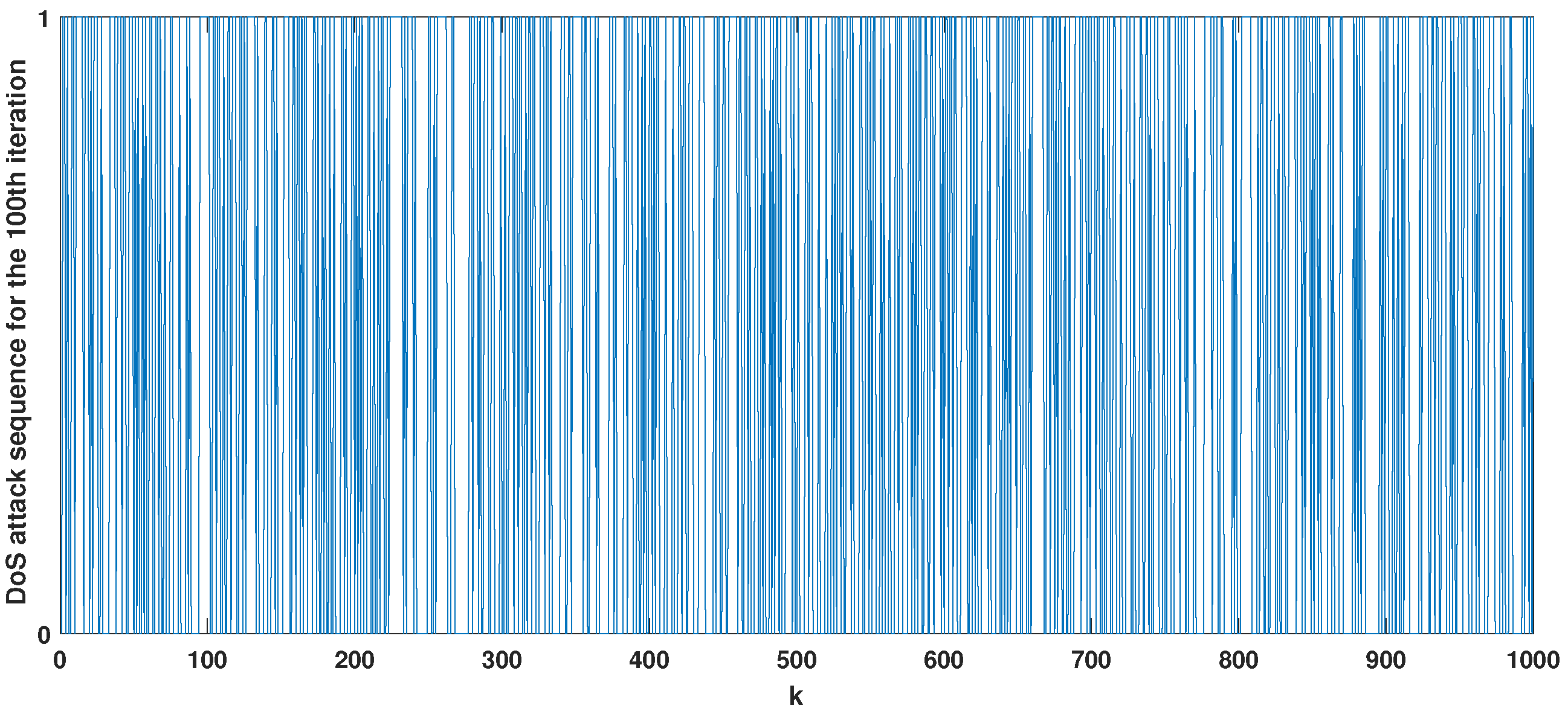
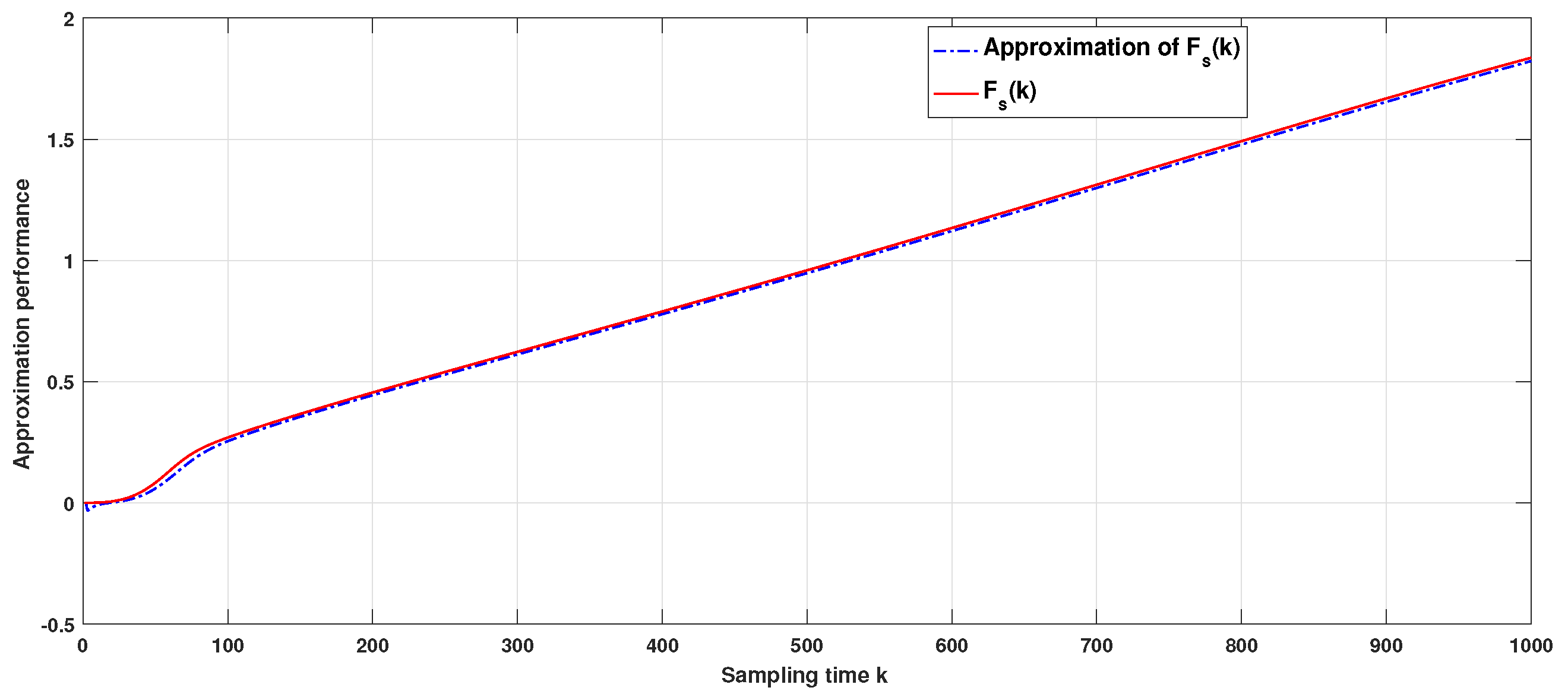
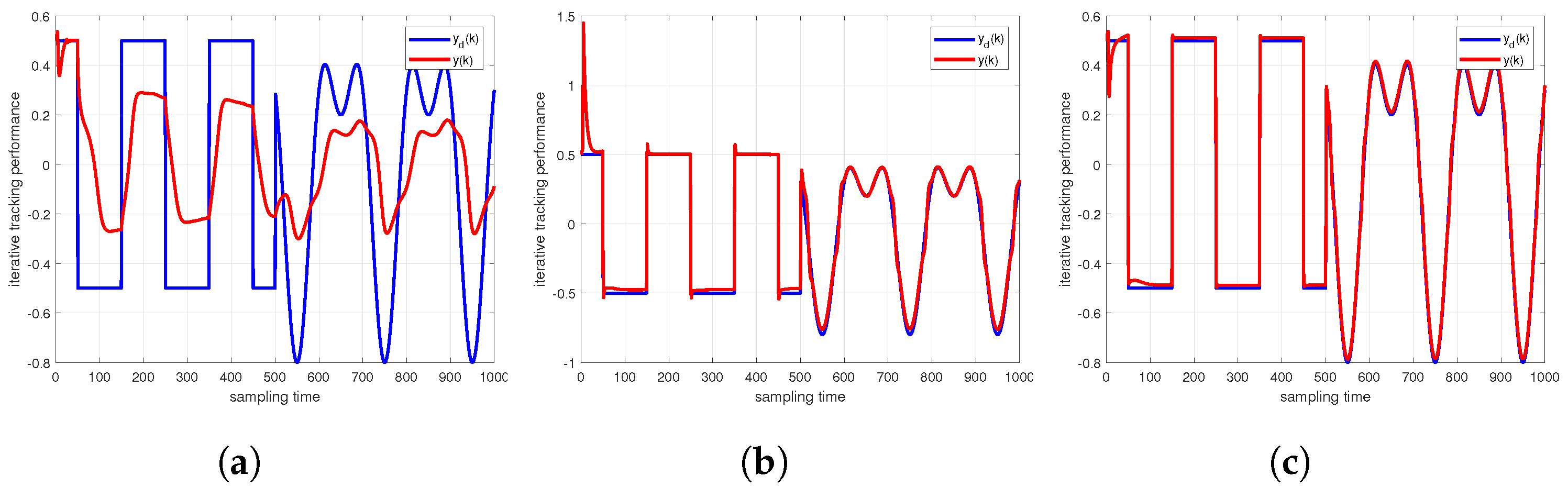
The Bernoulli distribution is shown in Figure 2 for a random sequence of DoS attacks. Figure 3 shows the simulation diagram approaching the sensor fault function by RBFNN. From Figure 3, we can clearly see the superiority of the approximation performance of the RBFNN. In Figure 4a–c, it shows the performance of for different iterations.
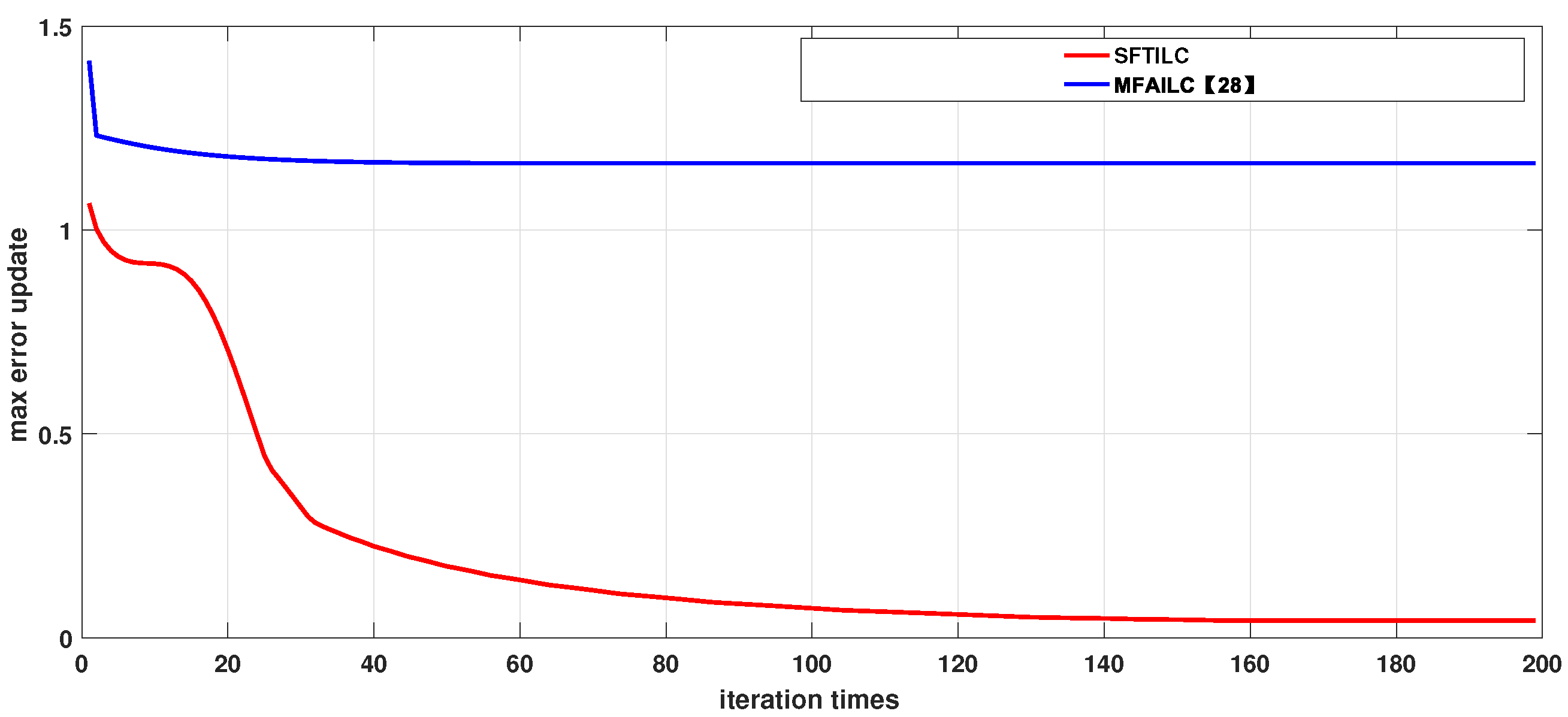
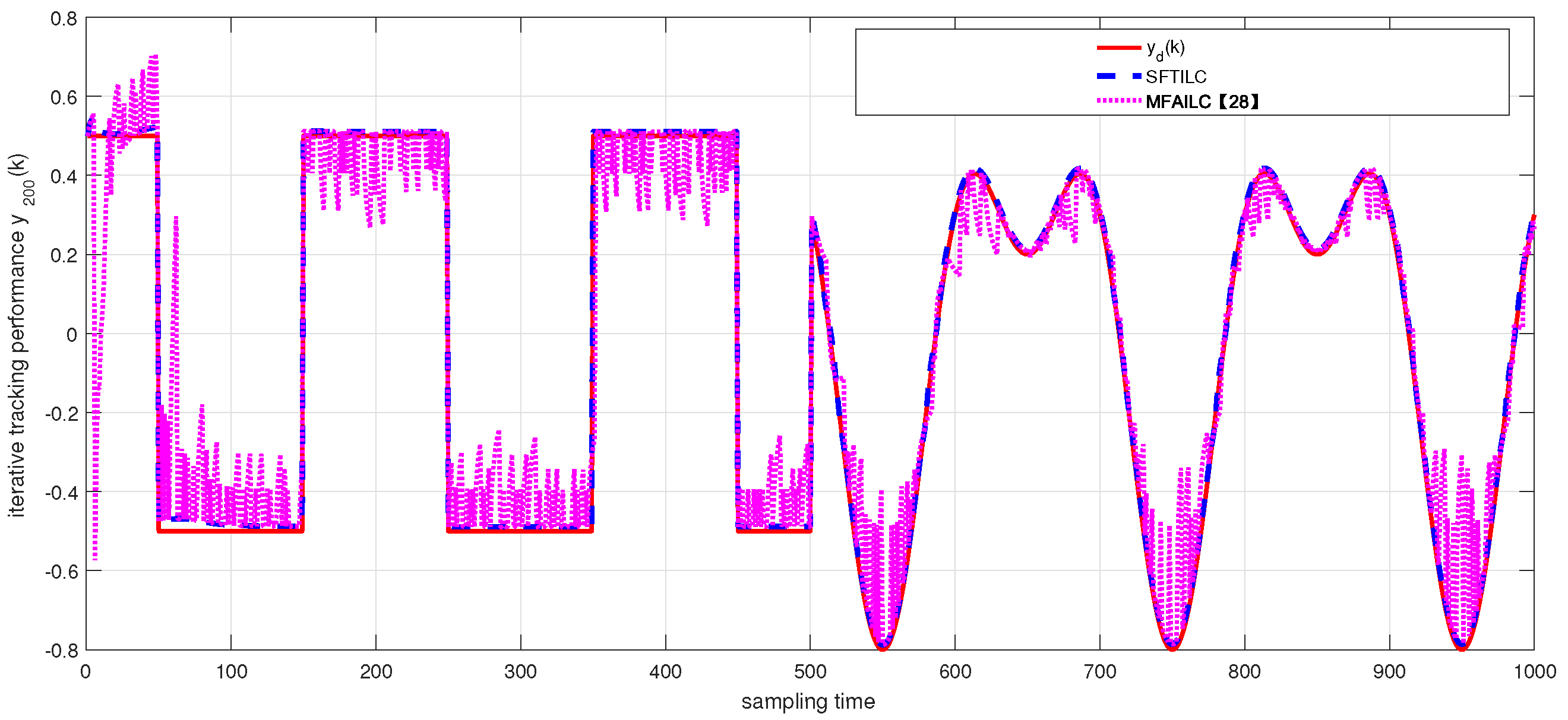
Figure 5 shows the comparison of the maximum tracking error with the number of times of iterations by using the SFTILC algorithm and the traditional MFAILC [28] under DoS attacks. In Figure 5, the SFTILC can make the tracking error converge to a smaller bound. Comparative results of tracking the performance of the system are depicted in Figure 6. From Figure 6, we can see that the tracking of the desired trajectory with the SFTILC algorithm is obviously better than that of the traditional MFAILC.
According to simulation results, the SFTILC algorithm can handle the output tracking tasks well when taking sensor failure and DoS attacks into account.
6. Conclusions
The data-based SFTILC problem of nonlinear networked control systems has been studied in this paper with sensor failures and DoS attacks. Firstly, the radial basis function neural network has been used to approximate the sensor failure function and a DoS attack compensation mechanism has been proposed in iterative domain to lessen the impact of the DoS attack. Then, using the dynamic linearization technology, the nonlinear system considering fault and network attack has been transformed into a linear data model. Further, a new data-based SFTILC algorithm has been designed to ensure the tracking performance of the system. Finally, a digital simulation has been used to demonstrate the effectiveness of the proposed SFTILC algorithm. In the future, we will consider the partial form dynamic linearization-based model-free adaptive algorithm that uses more input information to improve the control performance of the system.
Author Contributions
Writing—original draft preparation and software, Z.L.; writing—review and editing, C.Z.; writing—review and editing, supervision, W.C.; investigation and supervision, C.D.; methodology, validation and software, X.J. All authors have read and agreed to the published version of the manuscript.
Funding
This work is supported by the National Natural Science Foundation of China (Grant No. 61873338), the Taishan Scholars (No. tsqn201812052), and the Natural Science Foundation of Shandong Province (ZR2020KF034).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Gaid, M.; Cela, A.; Hamam, Y. Optimal integrated control and scheduling of networked control systems with communication constraints: Application to a car suspension system. IEEE Trans. Control Syst. Technol. 2006, 14, 776–787. [Google Scholar] [CrossRef] [Green Version]
- Shi, Y.; Yu, B. Output feedback stabilization of networked control systems with random delays modeled by markov chains. IEEE Trans. Autom. Control 2009, 54, 1668–1674. [Google Scholar]
- Xu, H.; Jagannathan, S. Neural network-based finite horizon stochastic optimal control design for nonlinear networked control systems. IEEE Trans. Neural Netw. Learn. Syst. 2015, 26, 472–485. [Google Scholar] [CrossRef] [PubMed]
- Qiu, J.; Gao, H.; Ding, S. Recent advances on fuzzy-model-based nonlinear networked control systems: A survey. IEEE Trans. Ind. Electron. 2016, 63, 1207–1217. [Google Scholar] [CrossRef]
- Guardabassi, G.; Savaresi, S. Virtual reference direct design method: An off-line approach to data-based control system design. IEEE Trans. Autom. Control 2000, 45, 954–959. [Google Scholar] [CrossRef]
- Mahish, P.; Pradhan, A. Mitigating subsynchronous resonance using synchrophasor data based control of wind farms. IEEE Trans. Power Deliv. 2020, 35, 364–376. [Google Scholar] [CrossRef]
- Deng, C.; Wen, C.; Huang, J.; Zhang, X.; Zou, Y. Distributed observer-based cooperative control approach for uncertain nonlinear MASs under event-triggered communication. IEEE Trans. Autom. Control 2021, 67, 2669–2676. [Google Scholar] [CrossRef]
- Bu, X.; Hou, Z.; Zhang, H. Data-driven multiagent systems consensus tracking using model free adaptive control. IEEE Trans. Neural Netw. Learn. Syst. 2017, 29, 1514–1524. [Google Scholar] [CrossRef]
- Meng, D.; Zhang, J. Design and analysis of data-driven learning control: An optimization-bBased approach. systems and control. IEEE Trans. Neural Netw. Learn. Syst. 2021, 1–15. [Google Scholar] [CrossRef]
- Jin, X. Nonrepetitive trajectory tracking for nonlinear autonomous agents with asymmetric output constraints using parametric iterative learning control. Int. J. Robust Nonlinear Control 2019, 29, 1941–1955. [Google Scholar] [CrossRef]
- Radac, M.; Lala, T. Hierarchical Cognitive Control for Unknown Dynamic Systems Tracking. Mathematics 2021, 9, 2752. [Google Scholar] [CrossRef]
- Memon, F.; Shao, C. Data-driven optimal PID type ILC for a class of nonlinear batch process. Int. J. Syst. Sci. 2020, 52, 263–276. [Google Scholar] [CrossRef]
- Hildebrand, R.; Lecchini, A.; Solari, G.; Gevers, M. Optimal prefiltering in iterative feedback tuning. IEEE Trans. Autom. Control 2005, 50, 1196–1200. [Google Scholar] [CrossRef] [Green Version]
- Zhu, Y.; Hou, Z. Data-driven MFAC for a class of discrete-time nonlinear systems with RBFNN. IEEE Trans. Neural Netw. Learn. Syst. 2014, 25, 1013–1020. [Google Scholar] [CrossRef]
- Hou, Z.; Chi, R.; Gao, H. An overview of dynamic-linearization-based data-driven control and applications. IEEE Trans. Ind. Electron. 2017, 64, 4076–4090. [Google Scholar] [CrossRef]
- Liao, Y.; Du, T.; Jiang, Q. Model-free adaptive control method with variable forgetting factor for unmanned surface vehicle control. Appl. Ocean. Res. 2019, 93, 1141–1187. [Google Scholar] [CrossRef]
- Meng, D. Convergence conditions for solving robust iterative learning control problems under nonrepetitive model uncertainties. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 1908–1919. [Google Scholar] [CrossRef]
- Meng, D.; Moore, K. Robust iterative learning control for nonrepetitive uncertain systems. IEEE Trans. Autom. Control 2017, 62, 907–913. [Google Scholar] [CrossRef]
- Zhou, C.; Che, W. Quantized data-based iterative learning control under denial-of-service attacks. Optim. Control. Appl. Methods 2021. [Google Scholar] [CrossRef]
- Zhang, X.; Han, Q.; Ge, X.; Ding, L. Resilient control design based on a sampled-data model for a class of networked control systems under denial-of-service attacks. IEEE Trans. Cybern. 2020, 50, 3616–3626. [Google Scholar] [CrossRef]
- Liu, J.; Suo, W.; Zha, L.; Tian, E.; Xie, X. Security distributed state estimation for nonlinear networked systems against DoS attacks. Int. J. Robust Nonlinear Control 2020, 30, 1156–1180. [Google Scholar] [CrossRef]
- Li, J.; Yang, Z.; Mu, X.; Wu, X. Passivity-based Event-triggered Fault Tolerant Control for Nonlinear Networked Control System with Actuator Failures and DoS Jamming Attacks. J. Frankl. Inst. 2020, 357, 9288–9307. [Google Scholar] [CrossRef]
- Hu, L.; Wang, Z.; Han, Q.; Liu, X. State estimation under false data injection attacks: Security analysis and system protection. Automatica 2018, 87, 176–183. [Google Scholar] [CrossRef] [Green Version]
- Ma, Y.; Che, W.; Deng, C.; Wu, Z. Observer-based event-triggered containment control for MASs under DoS attacks. IEEE Trans. Cybern. 2021, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Ma, Y.; Che, W.; Deng, C.; Wu, Z. Distributed model-free adaptive control for learning nonlinear MASs under DoS attacks. IEEE Trans. Neural Netw. Learn. Syst. 2021, 1–10. [Google Scholar] [CrossRef]
- Jin, X.; Che, W.; Wu, Z.; Wang, H. Analog control circuit designs for a class of continuous-time adaptive fault-tolerant control systems. IEEE Trans. Cybern. 2020, 52, 4209–4220. [Google Scholar] [CrossRef]
- Deng, C.; Jin, X.; Che, W.; Wang, H. Learning-based distributed resilient fault-tolerant control method for heterogeneous MASs under unknown leader dynamic. IEEE Trans. Neural Netw. Learn. Syst. 2021, 1–10. [Google Scholar] [CrossRef]
- Su, M.; Che, W. Fault-Tolerant control for model-free networked control systems under DoS attacks. J. Frankl. Inst. 2021, 358, 9023–9033. [Google Scholar] [CrossRef]
- Xing, J.; Li, N.; Chi, R.; Huang, B.; Hou, Z. Data-driven nonlinear ILC with varying trial lengths. J. Frankl. Inst. 2020, 357, 10262–10287. [Google Scholar] [CrossRef]
- Lian, J.; Hu, J.; Żak, S. Variable Neural Adaptive Robust Control: A Switched System Approach. IEEE Trans. Neural Netw. Learn. Syst. 2015, 26, 903–915. [Google Scholar] [CrossRef]
Figure 1.
System block diagram.

Figure 2.
DoS attack sequence for the 100th iteration.

Figure 3.
Sensor fault estimation.

Figure 4.
Performance for different iterations. (a) The tracking performance for the 10th iteration. (b) The tracking performance for the 50th iteration. (c) The tracking performance for the 100th iteration.
Figure 4.
Performance for different iterations. (a) The tracking performance for the 10th iteration. (b) The tracking performance for the 50th iteration. (c) The tracking performance for the 100th iteration.

Figure 5.
Maximum tracking error.

Figure 6.
Tracking performance.

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Li, Z.; Zhou, C.; Che, W.; Deng, C.; Jin, X. Data-Based Security Fault Tolerant Iterative Learning Control under Denial-of-Service Attacks. Actuators 2022, 11, 178. https://doi.org/10.3390/act11070178
AMA Style
Li Z, Zhou C, Che W, Deng C, Jin X. Data-Based Security Fault Tolerant Iterative Learning Control under Denial-of-Service Attacks. Actuators. 2022; 11(7):178. https://doi.org/10.3390/act11070178
Chicago/Turabian StyleLi, Zengwei, Changren Zhou, Weiwei Che, Chao Deng, and Xiaozheng Jin. 2022. "Data-Based Security Fault Tolerant Iterative Learning Control under Denial-of-Service Attacks" Actuators 11, no. 7: 178. https://doi.org/10.3390/act11070178
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.