 Zihao Zhao1,2
Zihao Zhao1,2 Yanhong Wang1,2
Yanhong Wang1,2 Qiaosha Zou1
Qiaosha Zou1 Tie Xu3Fangbo Tao3Jiansong Zhang3
Tie Xu3Fangbo Tao3Jiansong Zhang3 Xiaoan Wang4C.-J. Richard Shi5
Xiaoan Wang4C.-J. Richard Shi5 Junwen Luo2,4*Yuan Xie2
Junwen Luo2,4*Yuan Xie2- 1School of Microelectronics, Fudan University, Shanghai, China
- 2Alibaba DAMO Academy, Shanghai, China
- 3Alibaba Group, Hangzhou, China
- 4BrainUp Research Laboratory, Shanghai, China
- 5Department of Electrical and Computer Engineering, University of Washington, Seattle, WA, United States
Action recognition is an exciting research avenue for artificial intelligence since it may be a game changer in emerging industrial fields such as robotic visions and automobiles. However, current deep learning (DL) faces major challenges for such applications because of the huge computational cost and inefficient learning. Hence, we developed a novel brain-inspired spiking neural network (SNN) based system titled spiking gating flow (SGF) for online action learning. The developed system consists of multiple SGF units which are assembled in a hierarchical manner. A single SGF unit contains three layers: a feature extraction layer, an event-driven layer, and a histogram-based training layer. To demonstrate the capability of the developed system, we employed a standard dynamic vision sensor (DVS) gesture classification as a benchmark. The results indicated that we can achieve 87.5% of accuracy which is comparable with DL, but at a smaller training/inference data number ratio of 1.5:1. Only a single training epoch is required during the learning process. Meanwhile, to the best of our knowledge, this is the highest accuracy among the non-backpropagation based SNNs. Finally, we conclude the few-shot learning (FSL) paradigm of the developed network: 1) a hierarchical structure-based network design involves prior human knowledge; 2) SNNs for content-based global dynamic feature detection.
1. Introduction
Deep learning (DL) nowadays exerts a substantial impact on a wide range of computer vision tasks such as face recognition (Hu et al., 2015) and image classifications (Krizhevsky et al., 2012). But, it is still facing major challenges when processing information with high dimensional spatiotemporal dynamics such as video action recognition. This is because of two reasons: 1) the huge computational cost: the deep neural networks have to capture dynamic information across timing dimensions, which requires significant computational resources for the training stage (He et al., 2016) and 2) inefficient learning: events contain significant global dynamic features that are seldom captured by the DL, but these can be easily recognized by biological systems (Purves et al., 2014). One promising technology of sparsity (Liu et al., 2015, 2021; Wen et al., 2016) can relieve the first issue of the intensive computation to some extent, but the training cost is still enormous. Recently, few-shot learning (FSL) is proposed to tackle this problem. With prior knowledge, FSL can quickly generalize to new tasks with only a few labeled training samples (Sung et al., 2018; Wang et al., 2020; Chen et al., 2022).
Fortunately, spiking neural networks (SNNs) are an alternative candidate to perform spatiotemporal related tasks (Lobo et al., 2020) with FSL capability. By taking the natural characters of computing with time and in an event-driven manner, real-world event information will be encoded into spike trains as inputs along with timing frames. With a brain-inspired hierarchical network processing, the output spike patterns are interpreted as inference results via neural decoding methods (e.g., spike timing coding, rank coding, and spike count coding). Therefore, this could be an efficient technique for such applications, and another potential path toward the next generation AI (Furber and Temple, 2008).
However, employing SNNs for action recognition remains challenging since it lacks an efficient learning algorithm. Recently, SNN-based learning systems can be classified into three levels: a micro-level, a middle-level, and a macro-level system. A micro-level system emphasis place on utilizing low-level spiking neuron computing characters such as the temporal process and in an integration-and-fire manner (Caporale and Dan, 2008; Lee et al., 2016; Amir et al., 2017; Wu et al., 2018; Zhang and Li, 2019). For instance, Wu et al. (2018) proposed an SNN-based spatiotemporal back-propagation (BP) for a dynamic N-MINST event classification, the developed algorithm successfully combined spatial and temporal domain kernels and achieved inference accuracy of 98.78%. Also, Amir et al. (2017) illustrated a convolution neural network (CNN)-based SNN for gesture classification. By employing an event-driven sensor and the TrueNorth neuromorphic chip, the system shows 178.8 mW power consumption and 96.49% of accuracy. Meanwhile, a reservoir layer-based SNN utilizes the spike-timing dependent plasticity (STDP) rule to update weights. Such a novel network can achieve top-3 accuracy of 95% on IBM DVS gesture task (Amir et al., 2017). However, the higher-level computing entities in SNN such as attractor dynamics are missing in the system, which results in inefficient learning.
A middle-level system indicates that SNNs apply global dynamic behaviors in the learning process (Eliasmith, 2005; Sussillo and Abbott, 2009; Bekolay et al., 2014; Voelker et al., 2019; Luo and Chen, 2020; Chilkuri et al., 2021). A FORCE learning method (Sussillo and Abbott, 2009) is able to convert network chaos patterns into a desired one by modifying synaptic weights. Also, a neural engine framework (NEF) develops a method to build dynamic systems based on spiking neurons (Bekolay et al., 2014). Such an approach leverages neural non-linearity and weighted synaptic filters as computational resources. Compared to the first SNN type, a middle-level based SNNs place emphasis on global network dynamics rather than individual spiking neurons characters. Therefore, such systems demonstrate much better learning behaviors regarding scalability (Voelker et al., 2019) and model sizes (Chilkuri et al., 2021) in some particular scenarios.
A macro-level system includes advantages of both micro-level and middle-level systems (Sussillo and Abbott, 2009; Imam and Cleland, 2019). It combines detailed spiking neuron characters and network dynamics together to form a unique learning system. For instance, an olfactory SNN is largely based on the mammalian bulb network architecture, and with a line attractor-based neural plasticity rule for online learning odorants (Imam and Cleland, 2019). The developed system shows great one-shot learning behavior compared to the DL. Meanwhile, Wu et al. (2022) proposed a spike-based hybrid plasticity model for solving FSL, continual learning, and fault-tolerance learning problems, and it combines both local plasticity and global supervise information for multi-task learning.
In this work, we developed a novel macro-level system titled spike gating flow (SGF) for action recognition as shown in Figure 1. The system consists of multiple SGF units that are connected in a hierarchical manner. An SGF unit consists of three layers: 1) a feature extraction layer for global dynamic feature detection; 2) an event-driven layer for generating event global feature vectors; 3) a supervise-based histogram training layer for online learning (redlines in Figure 1). By employing a dynamic vision sensor (DVS) (Posch et al., 2011)-based gesture dataset (Amir et al., 2017) as a benchmark, the results demonstrated that the developed SGF had great learning performance: 1) the system can achieve the same level of accuracy of 87.5% as the DL but with a training/inference sample ratio of 1.5:1. More importantly, only one epoch is required during the training; 2) to our best knowledge, this is the highest accuracy among the non-BP based SNNs; 3) the system consumes only 9 mW and 99 KB memory resources on an FPGA board at the inference stage. In summary, the contributions are as follows:
• Algorithm aspect: we developed an efficient FSL system for gesture recognition, which behaves like biological intelligence: FSL, energy efficient, and explainable.
• Application aspect: the SGF-based hardware showed reasonable memory size (99 KB) and power consumption (9 mW), which was suitable for the edge/end-device scenarios.
• Learning theory aspect: we concluded one FSL paradigm: 1) a hierarchical structure-based network design involves prior human knowledge; 2) SNNs for global dynamic feature detection.
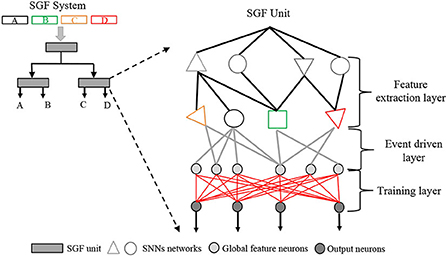
Figure 1. The spike gating flow (SGF) system concept. It consists of multiple SGF units. Each SGF unit involves three layers: 1) a feature extraction layer, 2) an event-driven layer, and 3) a training layer. On the top left, there is an example of a four-event classification SGF system: A, B, C, and D are four event types.
2. The spike gating flow
The Spike Gating Flow (SGF) is a new learning theory to achieve online few-shot training, which is inspired from the neural engineering framework (NEF) (Paulin, 2004) and brain assemble theories (Papadimitriou et al., 2020). In brief, the FSL capabilities rely on the prior knowledge embedded in the hierarchical architecture and global feature computing. The online computing benefits from using dynamic spike patterns to encode both data and control flow. Therefore, different level nodes in the network are served as gates to pass or stop input data information, and spikes are served as gate control signals. We have concluded the key principles of SGF as below:
• Global feature representations: Network representations are defined by the combination of different global movement features rather than local pixel features.
• Tailor designed hierarchical network structure: A hierarchical structure-based network for conditional data-path execution. Depending on inputs, SGF unit spike patterns are served as gate commands to manipulate data-paths.
• Histogram based training algorithms: A global feature-based histogram training adjusts output layer weights based on historical information.
Based on such principles, we designed three SGF units and carefully connected them into a two-level network, particularly for online gesture recognition. Such an architecture could be considered as a pre-designed learning rule, and each SGF unit was designed based on the cell assemble theories (Müller et al., 2020), and it responded to unique content-based global dynamic features. These units could be assembled into hierarchical levels according to prior human knowledge, which facilitated the learning efficiency of the system. As shown in Figure 2, the top area of the developed network was a spatial SGF unit A, and the bottom areas were temporal SGF units B and C. We designed the SGF network by breaking the complex gesture features into spatial and temporal domains in sequence. For example, the SGF unit A captured spatial features, such as action ranges and intensities, and generated a coarse-grained classification. The SGF units B and C are in charge of refining them into final results by detecting the temporal information. Typically, an SGF unit consisted of three layers: a feature extraction layer, an event-driven layer, and a histogram-based training layer. Also, there can be some structural variations of SGF units. For instance, the SGF unit B has a feature extraction layer only.
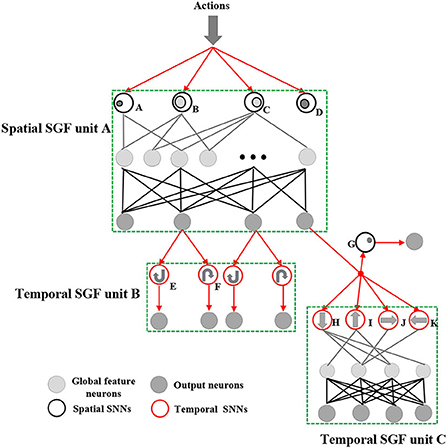
Figure 2. The spiking gating flow (SGF) network architecture. It mainly consists of three SGF units: a spatial SGF unit A and temporal SGF units B and C. A spatial SGF unit A has four SNNs with feature ID index A-D (A: intensive activities at constrained left areas; B: mild activities at plateau left areas; C: mild activities at plateau right areas; D: intensive activities at constrained right areas). A temporal SGF unit B has two SNNs with feature ID E,F (E: clockwise movement; F: counter-clockwise movement). A temporal unit C has four SNNs with feature ID index H-K (H: top-down; I: bottom-up; J: left-right; K: right-left). Also, the developed network has 10 output neurons corresponding to 10 action types.
For an SGF unit computing process, at first, a feature extraction layer is used to detect global dynamic features of events. Each SGF unit has several corresponding spatial SNNs and temporal SNNs, which target in detecting different global features (features with index A-I are shown in Figure 2). An SGF unit A has four spatial SNN networks, which respond to spatial feature detection as below: A) intensive activities at a constrained left area; B) mild activities at a large left area; C) mild activities at a large right area; D) intensive activities at constrained right areas. An SGF unit B has two temporal SNN networks for E) clockwise movements and F) counter-clockwise movements. Particularly, a prior human knowledge of event sequences is introduced here for designing E and F. An SGF unit C has four temporal SNNs and one spatial SNN for detecting as follows: G) intensive activities at a specific constrained area. H) up-down movements; I) bottom-up movements; J) left-right movements, and K) right-left movements. The detailed computing mechanisms of SNNs are described in Section 3 of SNN design.
Next, there is an event-driven layer that connects SNNs outputs to the global feature neurons. This layer is responsible for generating event feature vectors for the next training layer. Typically, an event class will have several feature vectors types due to the spatiotemporal variations. A feature vector can be defined as a combination of feature indexes of all active SNNs, which are represented by connecting active SNNs to one global neuron. Therefore, for each action type, global feature neuron number is equal to the feature vector type number.
At last, an SGF unit has a fully connected histogram-based training layer, in which each output neuron connects to its all global feature neurons. After each training trail, feature vector histogram will be updated and converted into corresponding weights. In addition, the conversion is a normalization process. This result of the higher the histogram number is, the bigger the weights are. At the inference stage, the feature vector generated from a test sample will be sent into all output neurons for final scores, which follows the equation as below:
Where Sm∈[0, 1] is a testing sample score at mth output neuron (mthclassification); is the weight of jth feature vector for the mth output neuron; is the jth feature vector of the mth output neuron; and V is the feature vector of the testing samples. Both the and V consist of 1-bit values which belong to {0, 1}. The symbol ⊙ is a bit-wise NXOR operation, and Lv is the length of the feature vector. Then, the final decision is the classification with the highest score. The key advances of such a learning algorithm are that each data sample only requires one training time and tiny computational resources for updating weights, which enables rapid online learning behaviors.
A detailed example is illustrated in Figure 3. SNNs with feature index A and D are active at the first training trail, which forms a feature vector[A−D]. Hence, a corresponding global feature neuron is generated that connects to SNNs with feature indexes A and D (connected with red lines). A feature vector histogram is also displayed in Figure 3A left. After that, the feature vector[A−D] histogram values will be converted into output neuron weights of event type A. It is clearly seen that the weight is one since there is only one feature vector type (Figure 3A). Meanwhile, a knowledge graph of event type A is produced through quantitative analysis of feature vectors distributions (Figure 3A right). At a 10th training trail, there are three more feature vectors generated [A−C, A, C] (Figure 3B left red lines). This indicates that there are in total four types of feature vector in the event type A. Identically, corresponding feature vectors histogram numbers [3, 1, 5, 1] will be transformed into event A neuron outputs weights via a training layer. The feature vector's distribution is also updated in the knowledge graph: a vector with green lines indicates that histogram values are decreased, while a vector with red lines indicates that histogram values are raised. At the end of a 100th training trail, there is no new feature vector appeared, which results in the same global feature neuron number as the 10th training trail. The event A output neuron weights are updated based on the current histogram numbers as a final result. Similarly, the event types B and C follow the same training procedures.
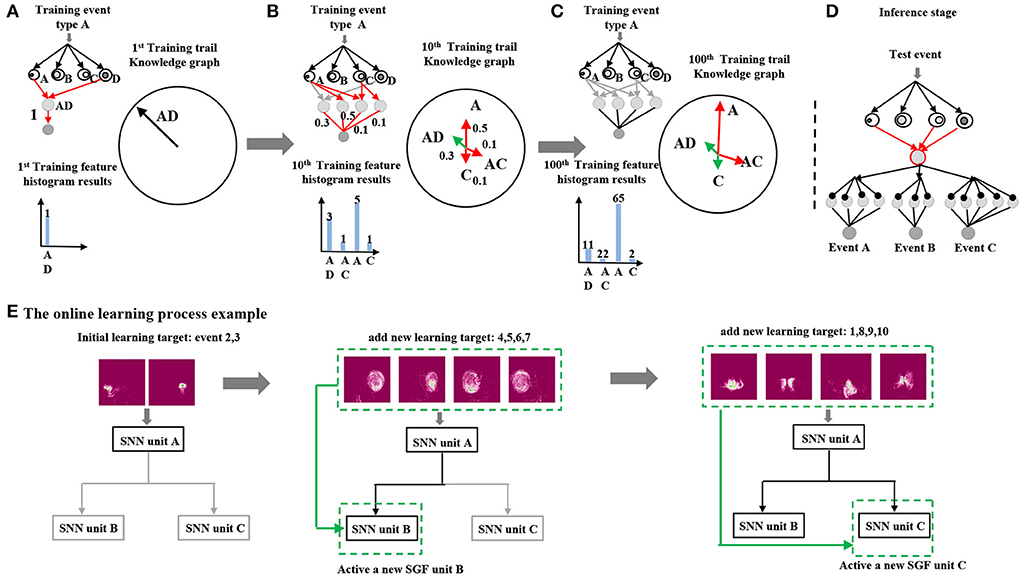
Figure 3. (A–D) The histogram-based training example of an event type A. (E) An example of the system online learning process.
At the inference stage, a test sample was given into the trained network, which would generate a corresponding test feature vector. It would go through all the output neurons to calculate the final scores. As shown in Figure 3D, there is a trained network which contains three output neurons, whose inference classification result is the maximum one among these output neuron scores.
The online learning process example is shown in Figure 3E. At an initial stage, event group A [3: right-hand wave; 2: left-hand wave] was sent into the network for training. Since event group A contained significant spatial features, only a spatial SGF unit A was active and responsible for generating feature vectors. After finishing learning event group A, event group B [4: right arm clockwise, 5: right arm counter clockwise, 6: left arm clockwise, and 7: left arm counter clockwise] was sent into the network for sequential online learning. Identically, a temporal SGF unit B was active for recognizing clockwise/counter clockwise movements. At last, event group C [1: hand clap, 2: left-hand wave, 8: arm rolls, 9: air drum, and 10: air guitar] was sent into the network that contained complex combinations of vertical and horizontal movements. The SGF unit C was active for learning such features. As it can be seen, the final network architecture varied depending on the learning targets.
3. Design of SNNs
We have developed two types of SNNs, spatial SNN and temporal SNN, and a preprocessing module, spatiotemporal (ST) cores. An ST core aims to reduce the background noise of the DVS camera and enhance the key ST information. Spatial SNNs respond to capturing event's spatial features. Temporal SNNs are expert in distinguishing object movement directions. By combining these SNNs, a system can have rich representations of various ST features for action classifications.
3.1. ST core
Since a DVS camera has a unique output format, a ST core is designed for DVS output preprocessing: 1) to reduce the DVS output noise and 2) to enhance the key spatiotemporal information. An ST core involves two-stage computations: spatial and temporal processing. The mathematical model is as below:
Where is the output of the mth ST core at frame t; is the output of the mth DVS sensor pixel at frame t, which equals to –1 or +1; ΔSTs is the detection range of an ST core. The function equals 1 if S is over spatial thresholds θs. Regarding the temporal computations, ΔSTt is an integration window, and θt is a temporal threshold. The function equals 1 if T is over spatial thresholds θt. As a result of this, by adjusting the above four parameters [ΔSTs, θs, ΔSTt, and θt], we can configure the ST core filtering behaviors properly. In general, each SNN will require an ST core for feature extraction. More details of preprocessing the DVS gesture dataset are illustrated in the Result Section 4.3.
3.2. Spatial SNNs
A spatial SNN is designed for extracting spatial features based on the ST core outputs. The computing mechanism is quite similar to an ST core. However, the major differences rely on the following: 1) the outputs of a spatial SNN are a feature vector; 2) a spatial SNN does not require temporal information, and it accumulates all the frames of [0, T] together first and performs spatial computing. The spatial SNN equations are as below:
Where T is the total frame number of an event. ΔSPs is the detection size and SPm is the mth spatial SNN outputs. The outputs can be a single bit or multiple bits. θi is the gate neuron threshold for intensity, and θa is the gate neuron threshold for the area. As Figure 4A depicts, an event consisting of T frames is processed by intensity gate neurons first. After that, intensity gate neuron spikes are employed as inputs for area gate neurons.
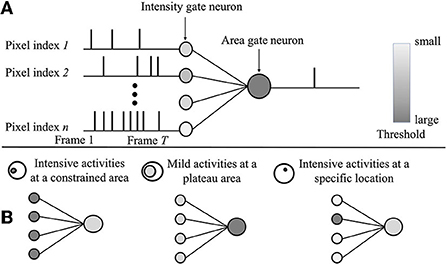
Figure 4. (A) The spatial spiking neural network (SNN) computing mechanism. The event consists of T frames in total. (B) Examples of three spatial SNNs focus on different global feature detection.
By adjusting two thresholds' values, three different spatial SNNs can be reconstructed in Figure 4B: 1) spatial SNNs with feature index [A, D]: intensive activities as a constrained area [θ1>θ2]; 2) spatial SNNs with feature index [B, C]: mild activities at a large area [θ1 < θ2]; and 3) spatial SNNs with feature index [G]: intensive activities at a specific location.
3.3. Temporal SNNs
Temporal SNNs are designed for detecting the movement directions of an event (e.g., up-down, left-right). The key principle is to encode the object's temporal location into temporal neuron spiking patterns. The equation is shown below:
Where is the output of the mth temporal neuron at frame t; is the location of the ith temporal active neuron at frame t, the location can be either vertical or horizontal information depending on the temporal SNN type. ΔTEt is the comparison frame window; θl is the location index threshold, is the active neuron number at frame t−ΔTEt. θte is the temporal neuron spiking threshold. For each frame, the object location is calculated by selecting the maximum location index of fired neurons. Therefore, objects' temporal movement patterns can be obtained by a combination of the generated object location at each frame, which serves as event temporal feature vectors.
For instance, Figure 5 shows a temporal SNN with feature index H for detecting top-down movements. At a frame n, an object is vertically located at areas from [4, 1] to [4, 5]. Since this is the first frame, a temporal SNN does not generate activities because there is no reference for comparison. At a frame n+1, an object is moving down to a new location as the gray color indicates. Each active neuron (neuron that receives non-zero ST core outputs) compares its location to all the active neurons at the previous compared frame. If the current neuron location is lower than that of the previous frame, the current neuron receives an input value from the compared neuron. In this top-down case, the location index is defined as the vertical information (Y-axis). The temporal SNN outputs are shown in Figure 5B, neurons with dark colors indicate large input values, while neurons with light colors indicate limited input values. Neurons then generate a spike where values are above a threshold θte. After calculating all the frames, the object's temporal movements are represented by the generated temporal feature vectors. A temporal SNN with feature index H will be active if an object movement temporal feature vector is consistent with its reference feature vector which is shown in Figure 5D bottom (top-down feature vector). Identically, temporal SNNs with feature index [I, J, K] follow the same computing mechanisms. Corresponding reference feature vectors are also shown in Figure 5D bottom. Reference feature vectors that can be pre-defined or learned depend on the task. Particularly, SNNs with feature index [E, F] clockwise and counter clockwise require temporal feature vector timing information that is based on a prior human knowledge. The clockwise counter event temporal pattern sequence is defined as [top-down, left-right, bottom-up, and right-left], and the clockwise event temporal pattern sequence is defined as [top-down, right-left, bottom-up, and left-right].
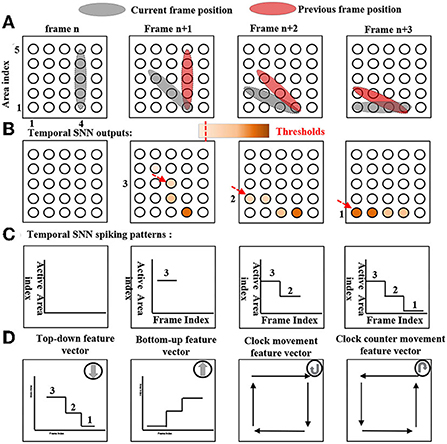
Figure 5. The temporal SNN with feature index H top-down computing mechanism. Also, reference patterns of temporal SNNs with feature indexes E, F, and I are shown at bottom as well. (A) The object movement. (B) Temporal SNN outputs. (C) Detected temporal SNN spiking patterns. (D) Reference pattern.
4. Results
DVS Dataset: A dynamic vision sensor gesture dataset (Amir et al., 2017) (10 classes of gesture actions of which each contains 98 training sequences and 24 test sequences) is employed to verify the system's performance. The event-driven sensor data is different from the traditional video since the DVS records the change in each pixel on a 128*128 canvas independently. Specifically, a spike will be recorded into sequences if the brightness is changed in the pixel (with the column and row address).
Experiment Setting: We preprocessed the event-driven sensor data with a standard method (Rebecq et al., 2019). A frame is defined to be 1,000 continuous spikes, and each sequence in the dataset is divided into 50–80 frames. For each class, we used 36 sequences for training and 24 sequences for testing.
4.1. Network architecture
The network details and statistical results are shown in Table 1. The number of input and output neurons of our designed SNNs can be flexibly configured. The SNNs in unit B have the largest number of input (16,384) and output (160) neurons because of the more complex task. As a result, unit B has more operations (2.1 M) than unit A/C (7–63 K). However, they have the similar model size since the unit B does not have the event layer and the histogram-based layer. The details of parameter calculation are described in Appendix A.
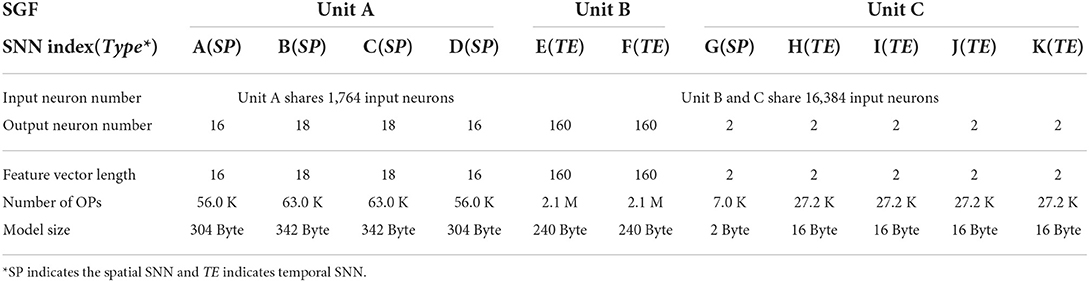
Table 1. The developed network architecture information.
4.2. System accuracy
In Table 2, we first compared the developed network with two typical SNN-based gesture recognition networks, an STDP-based SNN (George et al., 2020) and an SGD-based SNN (Perez-Nieves et al., 2021). To the best of our knowledge, our system achieved the highest accuracy of 87.5% among state-of-the-art non-BP-based SNNs. Regarding ANN/DNN converted SNN, the developed network can reach the same level of accuracy as SLAYER (Shrestha and Orchard, 2018), but slightly lower than ConvNet (Amir et al., 2017) at 96.5%, SCRNN (Xing et al., 2020) at 96.59%, Converted SNN (Kugele et al., 2020) at 96.97%, and PointNet++ (Qi et al., 2017) at 97.08%. However, the network model size can be reduced by 456 times compared to the ConvNet (Amir et al., 2017), and the number of operations can be reduced by 53 times compared to the PointNet++ (Qi et al., 2017).
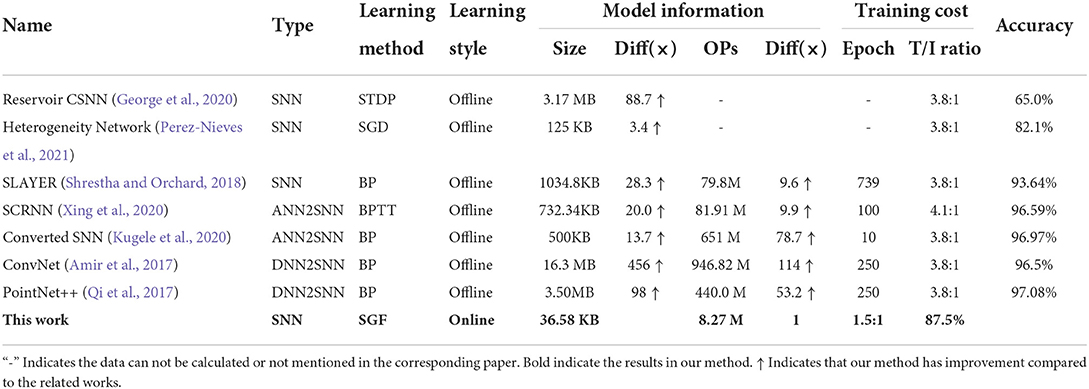
Table 2. The comparison between state-of-the-art methods and the proposed spiking gating flow (SGF) network.
Finally, the developed SGF only requires 1 training epoch at a condition of training/inference ratio of 1.5:1, while DL networks typically require hundreds of training epochs at a condition of 3.8:1. This indicates that the system training cost is significantly lower than the DL-based networks.
4.3. SNNs behaviors
The spiking neural networks can be tuned by adjusting the thresholds. For a particular dataset, we employed a grid search method to find an optimal threshold based on the training dataset and required functionalities.
The spatiotemporal core noise cancellation performance is shown in Figure 6. At the left side of the figure, there are original event pictures of a hand clap and an air drum. Event pictures are obtained via an ST core model process. A color bar on the right displayed spike intensities at each pixel. In the middle, there are the results of an ST core with weak noise cancellation (parameters are 1, 1, 2, 2), it is clearly seen that most of the sparse noise are disappeared. A right, there are results of an ST core with strong noise cancellation (parameters are 1, 1, 6, and 5), only most significant features are kept at this case.
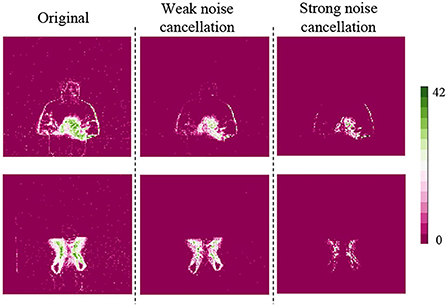
Figure 6. The spatiotemporal (ST) core weak and strong noise cancellation results.
Spatial SNNs computing performance is shown in Figure 7, events of the right-hand wave and the right-hand clock-wise movement are employed as examples. The results indicate that SNN with feature index A generates a spike for an event of the right-hand wave, since it is only sensitive to intensive activities in a constrained area. Furthermore, the SNN with feature index B generates a spike for an event of the right-hand clockwise, which results from the interest of mild activities on a large area.

Figure 7. The spatial SNN with feature indexes A and B results on events of the right-hand wave and right-hand clockwise.
Temporal SNNs computing performance is shown in Figure 8. Here, we employed an event of clockwise counter as an example. Four original frame information is shown in the top of Figure 8 top. Corresponding temporal SNNs with feature indexes H (top-down) and J (left-right) outputs are shown in the middle of Figure 8. It was clearly observed that there was a top-down movement pattern followed by a left-right movement pattern, which were identical to the pattern sequence of clockwise counter event.
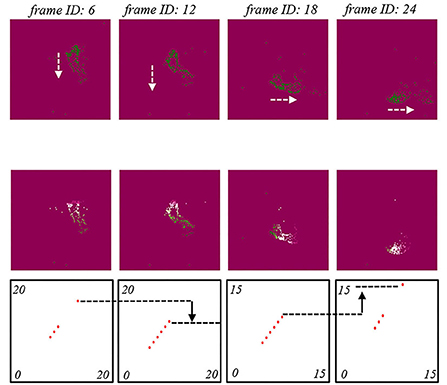
Figure 8. The temporal SNN with the performances of feature index E performances. The origin frames of a counter-clockwise counter event. The temporal SNN outputs and spiking patterns. The temporal SNN with feature index H. The temporal SNN with feature index J. The arrow indicates moving trajectory of the generated spikes.
4.4. FSL performance
We also investigated the system's FSL performance. By varying the data ratio between the training and inference stage, results are shown in Figure 9. Compared to a typical action recognition deep learning model C3D (Tran et al., 2015) (red line), the developed SGF illustrated excellent FSL performances. At a training/inference data number ratio 1.5:1 condition, the SGF reached the highest accuracy of 87.5%, while the C3D network only has 70% accuracy. However, there is a cross-point at a training/inference data number ratio of 3.8:1. The C3D network reached above 90% accuracy and surpassed the SGF network. In summary, we concluded the key design principles of the developed FSL paradigm: 1) a hierarchical structure-based network design involves prior human knowledge; 2) SNNs for global dynamic feature detection.
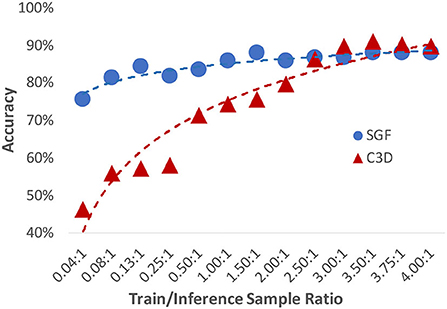
Figure 9. A comparison of the few-shot learning (FSL) performances on both SGF and C3D networks.
4.5. Design quality of SNNs
We evaluated our SGF unit design by visualizing the convergence speed. The faster the convergence speed, the higher the design qualities. In each trail, a training sequence was used to update the feature vectors. For an effective design, the number of feature vectors should be converged as the number of training trails increases. Thus, we visualized the number of generated feature vectors in Figure 10. From the experiment, we can draw several conclusions: a) Our SGF units A and C are feasible because the number of feature vectors is gradually convergent as we expected. For comparison, in the non-ideal case, the number of feature vectors increased linearly with the number of training trails so that cannot converge. b) Our SGF units A and C have good FSL potential. The results indicate that after 40 trails, the SGF units A and C already converged.
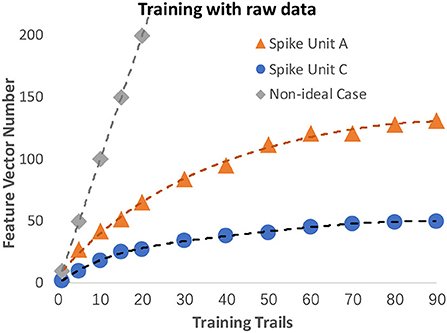
Figure 10. The SNNs design qualities performances. The SGF units A and C are shown in orange and blue color, while a non-ideal design case is shown in gray color.
4.6. Hardware implementations
A spiking gating flow inference model is implemented on an FPGA ZedBoard XC7Z020-CLG484-1 for testing the performance of a system hardware performance. As a proof of the concept, the hardware implemented SGF has the capability to classify five events. The developed hardware architecture is largely based on Luo et al. (2016) with modifications. The system configuration is shown in Figure 11A, a DVS camera DAVIS346 (Inivation) is directly connected to a laptop HP Pro Book 430 G6 via a custom designed UART communication protocol. Three event types classification results are shown in Figure 11B: left wave, right wave, and air drum. The power consumption is 9 mW and memory size is 99 KB, which means our SGF can serve as an ideal candidate for edge/end-device applications.The detailed hardware implementations are shown in Appendix B.
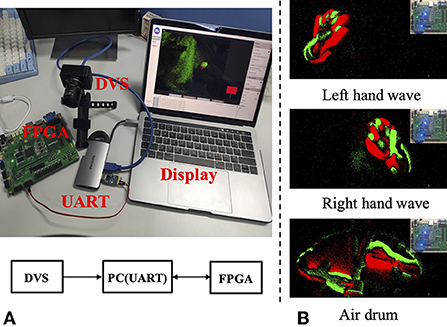
Figure 11. (A,B) The experimental setup: an SGF inference model is implemented on an FPGA ZedBoard XC7Z020-CLG484-1 for testing system hardware performances.
5. Discussion
This work presents a novel system titled SGF which has a strong dispersity with the current mainstream DL networks. First, we employed a standard DVS gesture classification as a proof of concept. Regarding the training performances, the developed network can achieve the same level of accuracy with the DL under a condition of the training/inference data ratio 1.5:1. More importantly, only one training epoch is required during the learning periods, which significantly reduced the system training cost. Also, in terms of the model complexity, the SGF model size is approximately 379 times smaller than a standard CNN network, and 2.8 times smaller than an SNN. Then we implemented a developed SGF inference model on a tailor designed hardware resulting limited power consummations (9 mW) and memory resources (99KB). At last we draw conclusions of essential factors for achieving few-shot learning paradigms: 1) a hierarchical architecture design encoded with human prior knowledge; 2) SNNs for global feature detections. At last, although the system capability has a considerable distance compared to the current DL network, the system shows the essential biological intelligence (e.g., few-shot learning, energy efficient, explainable) at a particular scenario. This may inspire us to design the next generation DL algorithms, and also raise a wider discussion among groups of computer hardware architecture, neuroscience and algorithms.
One of the major future works is that the network does not have strong generalization capabilities, which may not be suitable for processing a large-scale dataset (Soomro et al., 2012) (e.g., UCF101). This is due to the network architecture being tailor-designed for the gesture recognition task. Such a design principle of fusing prior human knowledge with SNNs global feature detection introduces a biological intelligence-based system but with limited flexibility. In the future, we will focus on solving the generalization issue in various technology paths: 1) designing an SNN based network architecture search (NAS) mechanism which is similar to the Auto ML (He et al., 2021); 2) introducing a reinforcement-learning based agent to generate learning rules that equal to the prior human knowledge (Williams, 1992); 3) utilizing biological brain assembling theories to build a learning logic-based architecture (Papadimitriou et al., 2020; Wu et al., 2022).
Data availability statement
Publicly available datasets were analyzed in this study. This data can be found at: https://research.ibm.com/interactive/dvsgesture.
Author contributions
ZZ and JL finish the main part of this work software, hardware, methodology, and writing. All other authors finish the remain work experiment, reviewing, and editing.
Funding
This work was supported by the project of National Key Research and Development Plan under Grants No. 2018YFB2202604 and the Science and Technology Commission of Shanghai Municipality under Grants 2018SHZDZX01.
Acknowledgments
The authors would like to acknowledge the partial support from Alibaba Innovative Research Project.
Conflict of interest
Authors TX, FT, and JZ are employed by Alibaba Group. Authors YX and JL are employed by Alibaba DAMO Academy.
The remaining authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher's note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Supplementary material
The Supplementary Material for this article can be found online at: https://www.frontiersin.org/articles/10.3389/fnins.2022.923587/full#supplementary-material
References
Amir, A., Taba, B., Berg, D. J., Melano, T., McKinstry, J. L., di Nolfo, C., et al. (2017). “A low power, fully event-based gesture recognition system,” in 2017 IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2017 (Honolulu, HI: IEEE Computer Society), 7388–7397.
Bekolay, T., Bergstra, J., Hunsberger, E., DeWolf, T., Stewart, T., Rasmussen, D., et al. (2014). Nengo: a python tool for building large-scale functional brain models. Front. Neuroinform. 7, 48. doi: 10.3389/fninf.2013.00048
Caporale, N., and Dan, Y. (2008). Spike timing-dependent plasticity: a hebbian learning rule. Ann. Rev. Neurosci. 31, 25–46. doi: 10.1146/annurev.neuro.31.060407.125639
Chen, C., Li, K., Wei, W., Zhou, J. T., and Zeng, Z. (2022). Hierarchical graph neural networks for few-shot learning. IEEE Trans. Circ. Syst. Video Technol. 32, 240–252. doi: 10.1109/TCSVT.2021.3058098
Chilkuri, N., Hunsberger, E., Voelker, A., Malik, G., and Eliasmith, C. (2021). Language modeling using lmus: 10x better data efficiency or improved scaling compared to transformers. CoRR, abs/2110.02402. doi: 10.48550/arXiv.2110.02402
Eliasmith, C. (2005). A unified approach to building and controlling spiking attractor networks. Neural Comput. 17, 1276–1314. doi: 10.1162/0899766053630332
Furber, S. B., and Temple, S. (2008). “Neural systems engineering,” in Computational Intelligence: A Compendium, volume 115 of Studies in Computational Intelligence, eds J. Fulcher and L. C. Jain (Springer), 763–796. doi: 10.1007/978-3-540-78293-3_18
George, A. M., Banerjee, D., Dey, S., Mukherjee, A., and Balamurali, P. (2020). “A reservoir-based convolutional spiking neural network for gesture recognition from DVS input,” in 2020 International Joint Conference on Neural Networks, IJCNN 2020 (Glasgow: IEEE), 1–9.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). “Deep residual learning for image recognition,” in 2016 IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2016 (Las Vegas, NV: IEEE Computer Society), 770–778.
He, X., Zhao, K., and Chu, X. (2021). Automl: a survey of the state-of-the-art. Knowl. Based Syst. 212, 106622. doi: 10.1016/j.knosys.2020.106622
Hu, G., Yang, Y., Yi, D., Kittler, J., Christmas, W. J., Li, S. Z., et al. (2015). “When face recognition meets with deep learning: an evaluation of convolutional neural networks for face recognition,” in 2015 IEEE International Conference on Computer Vision Workshop, ICCV Workshops 2015 (Santiago: IEEE Computer Society), 384–392.
Imam, N., and Cleland, T. A. (2019). Rapid online learning and robust recall in a neuromorphic olfactory circuit. Nat. Mach. Intell. 2, 181–191. doi: 10.1038/s42256-020-0159-4
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012). “Imagenet classification with deep convolutional neural networks,” in Advances in Neural Information Processing Systems 25: 26th Annual Conference on Neural Information Processing Systems 2012. Proceedings of a meeting held December 3-6, 2012, eds P. L. Bartlett, F. C. N. Pereira, C. J. C. Burges, L. Bottou, and K. Q. Weinberger (Lake Tahoe, NV), 1106–1114.
Kugele, A., Pfeil, T., Pfeiffer, M., and Chicca, E. (2020). Efficient processing of spatio-temporal data streams with spiking neural networks. Front. Neurosci. 14, 439. doi: 10.3389/fnins.2020.00439
Lee, J. H., Delbruck, T., and Pfeiffer, M. (2016). Training deep spiking neural networks using backpropagation. Front. Neurosci. 10, 508. doi: 10.3389/fnins.2016.00508
Liu, B., Wang, M., Foroosh, H., Tappen, M. F., and Pensky, M. (2015). “Sparse convolutional neural networks,” in IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2015 (Boston, MA: IEEE Computer Society), 806–814.
Liu, S., Zhao, Z., Wang, Y., Zou, Q., Zhang, Y., and Shi, C. R. (2021). “Systolic-array deep-learning acceleration exploring pattern-indexed coordinate-assisted sparsity for real-time on-device speech processing,” in GLSVLSI '21: Great Lakes Symposium on VLSI 2021, Virtual Event, USA, June 22-25, 2021, eds Y. Chen, V. V. Zhirnov, A. Sasan, and I. Savidis (ACM), 353–358. doi: 10.1145/3453688.3461530
Lobo, J. L., Ser, J. D., Bifet, A., and Kasabov, N. K. (2020). Spiking neural networks and online learning: an overview and perspectives. Neural Netw. 121, 88–100. doi: 10.1016/j.neunet.2019.09.004
Luo, J., and Chen, J. (2020). An internal clock based space-time neural network for motion speed recognition. CoRR, abs/2001.10159. doi: 10.48550/arXiv.2001.10159
Luo, J., Coapes, G., Mak, T., Yamazaki, T., Tin, C., and Degenaar, P. (2016). Real-time simulation of passage-of-time encoding in cerebellum using a scalable fpga-based system. IEEE Trans. Biomed. Circ. Syst. 10, 742–753. doi: 10.1109/TBCAS.2015.2460232
Müller, M. G., Papadimitriou, C. H., Maass, W., and Legenstein, R. (2020). A model for structured information representation in neural networks of the brain. eNeuro 7, ENEURO.0533-19.2020. doi: 10.1523/ENEURO.0533-19.2020
Papadimitriou, C. H., Vempala, S. S., Mitropolsky, D., Collins, M., and Maass, W. (2020). Brain computation by assemblies of neurons. Proc. Natl. Acad. Sci. U.S.A. 117, 14464–14472. doi: 10.1073/pnas.2001893117
Paulin, M. G. (2004). Neural engineering: computation, representation and dynamics in neurobiological systems: chris eliasmith, charles anderson; MIT press (december 2003), ISBN: 0262050714. Neural Netw. 17, 461–463. doi: 10.1016/j.neunet.2004.01.002
Perez-Nieves, N., Leung, V. C. H., Dragotti, P. L., and Goodman, D. F. M. (2021). Neural heterogeneity promotes robust learning. Nat. Commun. 12, 5791. doi: 10.1038/s41467-021-26022-3
Posch, C., Matolin, D., and Wohlgenannt, R. (2011). A QVGA 143 db dynamic range frame-free PWM image sensor with lossless pixel-level video compression and time-domain CDS. IEEE J. Solid State Circ. 46, 259–275. doi: 10.1109/JSSC.2010.2085952
Purves, D., Monson, B. B., Sundararajan, J., and Wojtach, W. T. (2014). How biological vision succeeds in the physical world. Proc. Natl. Acad. Sci. U.S.A. 111, 4750–4755. doi: 10.1073/pnas.1311309111
Qi, C. R., Su, H., Mo, K., and Guibas, L. J. (2017). “Pointnet: deep learning on point sets for 3d classification and segmentation,” in 2017 IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2017 (Honolulu, HI: IEEE Computer Society), 77–85.
Rebecq, H., Ranftl, R., Koltun, V., and Scaramuzza, D. (2019). “Events-to-video: Bringing modern computer vision to event cameras,” in IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2019 (Long Beach, CA: Computer Vision Foundation; IEEE), 3857–3866.
Shrestha, S. B., and Orchard, G. (2018). “Slayer: Spike layer error reassignment in time,” in Advances in Neural Information Processing Systems, eds S. Bengio, H. Wallach, H. Larochelle, K. Grauman, N. Cesa-Bianchi, and R. Garnett (Curran Associates, Inc.). Available online at: https://proceedings.neurips.cc/paper/2018/hash/82f2b308c3b01637c607ce05f52a2fed-Abstract.html
Soomro, K., Zamir, A. R., and Shah, M. (2012). Ucf101: A dataset of 101 human actions classes from videos in the wild. ArXiv, abs/1212.0402. doi: 10.48550/arXiv.1212.0402
Sung, F., Yang, Y., Zhang, L., Xiang, T., Torr, P. H., and Hospedales, T. M. (2018). “Learning to compare: relation network for few-shot learning,” in Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (Salt Lake City, UT: IEEE), 1199–1208.
Sussillo, D., and Abbott, L. (2009). Generating coherent patterns of activity from chaotic neural networks. Neuron 63, 544–557. doi: 10.1016/j.neuron.2009.07.018
Tran, D., Bourdev, L. D., Fergus, R., Torresani, L., and Paluri, M. (2015). “Learning spatiotemporal features with 3d convolutional networks,” in 2015 IEEE International Conference on Computer Vision, ICCV 2015 (Santiago: IEEE Computer Society), 4489–4497.
Voelker, A., Kajic, I., and Eliasmith, C. (2019). “Legendre memory units: Continuous-time representation in recurrent neural networks,” in Advances in Neural Information Processing Systems 32: Annual Conference on Neural Information Processing Systems 2019, NeurIPS 2019, December 8-14, 2019, eds H. M. Wallach, H. Larochelle, A. Beygelzimer, F. d'Alché-Buc, E. B. Fox, and R. Garnett (Vancouver, BC), 15544–15553.
Wang, Y., Yao, Q., Kwok, J. T., and Ni, L. M. (2020). Generalizing from a few examples: a survey on few-shot learning. ACM Comput. Surv. 53, 1–34. doi: 10.1145/3386252
Wen, W., Wu, C., Wang, Y., Chen, Y., and Li, H. (2016). “Learning structured sparsity in deep neural networks,” in Advances in Neural Information Processing Systems 29: Annual Conference on Neural Information Processing Systems 2016, December 5-10, 2016, eds D. D. Lee, M. Sugiyama, U. von Luxburg, I. Guyon, and R. Garnett (Barcelona), 2074–2082.
Williams, R. J. (1992). Simple statistical gradient-following algorithms for connectionist reinforcement learning. Mach. Learn. 8, 229–256. doi: 10.1007/BF00992696
Wu, Y., Deng, L., Li, G., Zhu, J., and Shi, L. (2018). Spatio-temporal backpropagation for training high-performance spiking neural networks. Front. Neurosci. 12, 331. doi: 10.3389/fnins.2018.00331
Wu, Y., Zhao, R., Zhu, J., Chen, F., Xu, M., Li, G., et al. (2022). Brain-inspired global-local learning incorporated with neuromorphic computing. Nat. Commun. 13, 1–14. doi: 10.1038/s41467-021-27653-2
Xing, Y., Caterina, G. D., and Soraghan, J. (2020). A new spiking convolutional recurrent neural network (scrnn) with applications to event-based hand gesture recognition. Front. Neurosci. 14, 590164. doi: 10.3389/fnins.2020.590164
Zhang, W., and Li, P. (2019). “Spike-train level backpropagation for training deep recurrent spiking neural networks,” in Advances in Neural Information Processing Systems 32: Annual Conference on Neural Information Processing Systems 2019, NeurIPS 2019, December 8-14, 2019, eds H. M. Wallach, H. Larochelle, A. Beygelzimer, F. d'Alché-Buc, E. B. Fox, and R. Garnett (Vancouver, BC), 7800–7811.
Keywords: spiking network, few-shot learning, online learning, gesture recognition, brain-inspired computation
Citation: Zhao Z, Wang Y, Zou Q, Xu T, Tao F, Zhang J, Wang X, Shi C-JR, Luo J and Xie Y (2022) The spike gating flow: A hierarchical structure-based spiking neural network for online gesture recognition. Front. Neurosci. 16:923587. doi: 10.3389/fnins.2022.923587
Received: 19 April 2022; Accepted: 03 October 2022;
Published: 02 November 2022.
Edited by:
Abhronil Sengupta, The Pennsylvania State University (PSU), United StatesReviewed by:
Simon Davidson, The University of Manchester, United KingdomS. G. Hu, University of Electronic Science and Technology of China, China
Gina Adam, George Washington University, United States
Copyright © 2022 Zhao, Wang, Zou, Xu, Tao, Zhang, Wang, Shi, Luo and Xie. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Junwen Luo, luojunwen@naolubrain.com