1. 引言
我国是制造业大国,缝制设备出口量居世界第一。中国纺织服装业进入“新时代”,正加速成为创新驱动的科技产业,第四次工业革命的到来,也使各国在智能化、自动化等方面展开激烈的竞争 [1] 。我国在缝纫机行业已取得较大成就,但自动化缝纫机方面的研究和发展未达到世界前列,与众多发达国家存在一定的差距 [2] 。锁眼机用于加工各类服饰的钮孔,分为平头锁眼机(直眼机)和圆头锁眼机(凤眼车),又分收尾和不收尾两种,是服装机械中非常重要的一种专用设备 [3] 。钉扣机是服装工业钉制各种钮扣的专用机器,是一种由针杆挑线、旋转钩线、单线链锁线迹的工业用缝纫机。机器的类型随着服装工业生产的发展和制造技术不断地改进,各种自动化装置和电子技术也广泛地应用于钉扣机上 [4] ,现在还有了自动送扣、钉扣于一体的钉扣机。
杨晓峰对中捷的圆头锁眼机进行三维建模并对运动机构进行分析,用ANSYS软件进行模态分析并提出了关键部位的调整方法 [5] 。高盼对Delta机器人的轨迹进行处理,三维建模并进行运动学仿真,搭建平台并设计人机交互界面验证了机器人缝制扣眼的可行性 [6] 。韦洪兰对圆头锁眼机的功能特征、系统结构、人机操作界面和伺服控制系统软硬件进行研究分析,经过验证基本满足了系统要求 [7] 。卢家富对平缝机的电气控制系统进行了设计与研究,通过实验测试得出了控制系统可靠、稳定等性能,满足缝纫要求 [8] 。华南牌钉扣机是我国最早生产的一种钉扣机。这种钉扣机的性能基本上近似于德国“杜尔克普”566型钉扣机,是旋转钩线、针杆挑线的单线链式线迹机器。现在市场上所用的钉扣机都具有机电一体化的功能,杰克的T1900B系列钉扣机,汇宝的1903系列钉扣机,并且还可以实现自动送扣功能。邢欣等人对钉扣机钩进行了拓扑布局的优化和结构参数优化,并且验证了设计方法在工程实际应用中的可行性 [9] 。李海涛等人研发了具有图案识别功能的自动钉扣机,解决了普通机器劳动强度大,生产效率低,线头长度超标等问题 [10] 。随着生产技术的提高,我国的钉扣机、锁眼机的发展也达到一个新高度,从人工脚踏式到电脑自动化控制,无论是钉扣机还是锁眼机无一不体现着科技的快速发展,正是这样各企业之间的竞争也愈加激烈,钉扣机、锁眼机要不断的更新迭代适应时代的发展 [11] 。
在实际生产过程中,每一台自动化的钉扣机、锁眼机都各需一个工人去操作,也要人工进行上、下料,需要人工对衣物放置、定位。有的钉扣机不带自动送扣装置,还要人工喂扣。虽然较之前来说效率已经提升了很多倍,但钉扣锁眼时,人工进行衣物的定位还是需要耗费一定的时间,尤其在给衬衫的袖口钉扣锁眼时,这种耗费人力、浪费时间且效率低的缺点更能体现出来。本文就围绕这些缺点与不足,提出钉扣锁眼一体机的想法,专门针对衬衫的袖襟同时实现钉扣、锁眼,此钉扣锁眼一体机具有自动化、快速、高效等优点。自动化程度高,对人员技术要求低,一个工作人员可同时操作多台机器,这对于解决人工上、下料问题,提高产量,降低工艺成本,减少时间成本都具有较高的实际意义,同时也可以提升企业的竞争能力,促进发展。
2. 钉扣锁眼一体机的结构设计
钉扣锁眼一体机由钉扣机、锁眼机、自动送扣振动盘、自动给料装置、自动送料装置、自动定位装置、自动上料装置、自动下料装置和自动收料装置组成,通过各部件的相互配合实现同时钉扣、锁眼动作。
2.1. 一体机的工作流程
设计各运动装置前需把工作流程定下来,方便运动装置后续的定位和安装,工作流程是否合理决定着完成一个布料的效率与成本,具体工作流程如图1所示。
2.2. 钉扣锁眼一体机的集成
钉扣锁眼一体机包括钉扣机、锁眼机、自动送扣振动盘及自动上下料、送料装置等组成,把这些单个装置全部集成到一台机架上面,形成钉扣锁眼一体机。
在设计中,自动给料装置的动力源为气动,气缸通过推杆带动托盘进行给料动作,自动给料装置通过螺栓固定在机架上。自动收料装置的设计原理与自动给料装置相似,不同点在于自动收料装置由两个气缸控制,第一个气缸的目的是通过气缸推杆带动收料箱体的运动,实现物料箱可以高于工作台面的运动。第二个气缸带动收料装置中的托盘运动,使钉制好的产品方便从收料箱中取出。自动收料装置的固定是要低于工作台面,也是通过螺栓将其固定在机架的梁上,这种设计的优点在于不会占用其他装置在机架上面的空间位置,可有效节约一体机的整体体积。
对于自动上料装置的设计是由导轨气缸、带刺针的气缸及其他板件组成,此结构的设计能够实现布料的抓取、放下与移送动作,通气后,导轨气缸带动板件实现水平方向上的运动,再对刺布气缸控制,实现产品的送料。
通过设计机械结构实现产品在传送过程中的横向与纵向定位,确保在上料时产品能够较为准确的到达指定位置,在工作台面最右端固定一个挡板实现横向定位,可作上下移动的L型板固定产品纵向位置,选用传送带为产品提供两个方向上的力,电机作为传送带的动力源,传送带与工作台面呈45˚夹角,使横纵两方向上的力尽可能相等。在设计自动定位装置时,还有一个重点考虑的问题是需要实现运送过来的产品可以在定位时旋转180˚,以便钉制的左右袖口布料产品数量相同,这就需要考虑用到旋转气缸,把旋转气缸固定在底板上,当产品到达指定位置,在电机的控制下旋转气缸的旋转。
关于自动上料装置的结构设计,在组成上主要有导轨、带传动、机械爪。选择带传动的原因是带传动具有运行平稳、能缓和冲击和振动等优点,在上料过程中需要保证产品较为准确的定位,故在移动中就需要平稳的条件,带传动恰好满足此要求。机械爪的张合由气缸来控制,导轨是机械爪进行前后运动的路径,通过螺栓接连固定机械爪与传送带,实现机械爪的前后运动并且还能保证机械爪在运送产品时的效率与准确度。自动下料装置与自动上料装置有一定的相似性,主要是由导轨气缸与机械爪组成,通过各气缸的前后、左右、上下带动机械爪的运动,进而实现自动下料的目的。
为了更好的看清各装置的机械结构,在建模时省略了运送产品的工作面,整体运动流程是:自动给料装置给料后,由带刺针的自动送料装置抓取输送到自动定位装置处,横纵方向定位之后由自动上料装置夹取布料放在钉扣机、锁眼机针眼下方,实现同时钉扣、锁眼动作,再由自动下料装置抓取布料移送至自动收料装置,从而完成整个运动流程,实现同时完成钉扣、锁眼。一体机建模如图2所示。
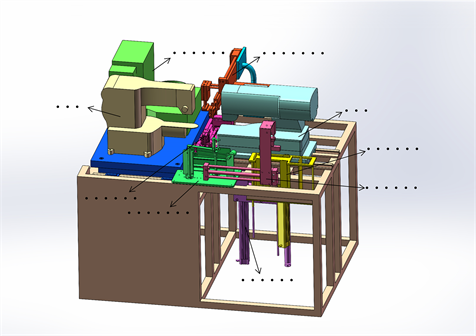
Figure 2. Model of the all-in-one machine
图2. 一体机模型图
3. 对整机机架的静力学分析
结构的静力学分析是研究力学性能最普遍的方法,是结构设计的基础,分析各运动装置对机架静力学影响特性,对研究钉扣锁眼一体机具有重要意义 [12] 。
3.1. 添加材料属性
一体机的机架及其他运动机构所选的材料基本为Q235钢,Q235是一种低碳钢,具有较好的可塑性、焊性和耐腐蚀性,因此在工业上应用很广泛 [13] 。部件的材料属性如表1所示。

Table 1. Material property of Q235 steel
表1. Q235钢的材料属性
3.2. 网格划分
网格划分的粗细程度直接影响计算机求解速度和计算结果的准确度,为了使计算结果尽可能的准确,先对各部件使用不同的网格划分方式进行划分,再将划分好的各部件进行整合,得到整机的网格划分。整机所选用的网格单元均选用六面体(Hex Dominant)网格,为保证整机网格划分的质量与计算机计算的速度,全局大小尺寸定为5,用ABAQUS软件自带的Display Mesh Quality模块检查整机网格质量,错误率为0,网格划分质量满足仿真要求。
3.3. 边界条件的设置
根据实际情况,钉扣锁眼一体机是放在地面上进行工作的,故设定一体机的四个底座与地面固定,与地面相接处的节点为全约束。
3.4. 静力学分析结果
在SolidWorks中设定各运动机构的材料属性,得到各机构的质量,转化为载荷施加在机架上,通过ABAQUS的静力学计算得到机架的应力云图和位移云图。应力云图如图3所示,位移云图如图4所示。

 (a) 机架整体应力云图 (b) A的区域放大图
(a) 机架整体应力云图 (b) A的区域放大图
Figure 3. Stress nephogram of the frame
图3. 机架的应力云图
 (a) 机架整体位移云图 (b) 机架的U3方向位移云图
(a) 机架整体位移云图 (b) 机架的U3方向位移云图
Figure 4. Displacement cloud image of the frame
图4. 机架的位移云图
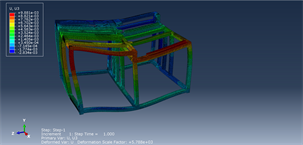
1) 通过整体机架的应力云图3(a)和局部放大应力云图3(b)可以看出,大部分均处于应力值较小的蓝色区域,但也有局部较大的应力值红色区域出现,绿色区域应力值相对大一些,主要出现在梁与梁的连接处,说明此处的静刚度较弱,若连接处后面需要结构优化,则需多加注意。
2) 由应力云图可知,最大应力值为6.832 MPa,根据Q235钢的材料许用应力公式(1)可知,机架的最大应力应小于235 MPa才可满足安全要求
(1)
已知最大应力完全小于Q235钢的屈服极限,因此,机架满足强度设计要求。
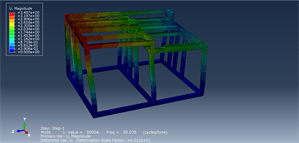
3) 通过机架的整体位移云图(图4(a))可以看出,最大位移变量值为26.71 μm,最大位移变形量主要集中在最外面的中间纵梁与其连接四个横梁的连接处,这是由于最上面的连接处受到上面下料装置、左面收料气缸、右面振动盘、前面上料装置四个方位所施加的载荷,进而力向下传递,中间量的变形量也较大,位移云图所表现出的整体位移变量情况是与实际施加载荷情况相符合的。
4) 由于对机架所施加的载荷主要集中在Y方向(竖直向下)上,受力面主要是Z方向,其他方向上受载荷的位移量变化较小,故只查看U3方向的位移云图(即图4(b)所示)。从U3方向的位移云图可以看出,最大位移变量是9.881 μm,最大位移变化量红色区域主要集中在最前面两根横梁,这是由于除了受到各自施加的载荷外,还受到中间纵梁上的载荷所传递的压力,位移变化量也与实际符合。
4. 对一体机的模态分析
对一体机的设计除了要分析机架的设计是否满足刚度、强度要求,其动力学分析也是需要考虑的部分,因此文章对无机头机架、有机头机架、有机头有垫片机架三种不同类型的结构进行模态分析,为后续优化设计一体机提供较好的理论依据。由于一体机结构复杂含有很多倒角与螺栓孔会降低计算结果的精度与准确性,故对结构进行了一些简化处理,因高阶模态误差较大,本文提取前6阶固有频率与振型进行分析。
4.1. 模态分析理论
模态分析是研究结构振动特性的一种近代方法,是结构动态设计的基础,模态是机械结构固有的振动特性,每个模态都有其特定的固有频率、振型和阻尼比 [14] ,分为自由模态与约束模态,最终目的是识别出系统的模态参数,为结构的振动特性分析、结构动力特性的优化提供理论依据。
对于实际工作中的一体机来说,求解其结构的动力学微分方程为:
(2)
式(2)中:[M]–系统的质量矩阵、[C]–系统的阻尼矩阵、[K]–系统的刚度矩阵;
–振动加速度矢量、
–振动速度矢量、
–振动位移矢量。质量矩阵、阻尼矩阵和刚度矩阵完全决定了系统的振动特性 [15] 。
模态与是否受外界载荷无关,是由其材料属性、自身结构与设置的边界条件所决定的,在进行模态分析时,因为结构的阻尼比很小,所以通常不考虑结构的阻尼比和外部载荷,式(2)可简化为:
(3)
式(3)中:[M]–系统的质量矩阵、[K]–系统的刚度矩阵,并且都为正定矩阵。
根据式(3)可以求解出无阻尼状态下的特征频率方程,其形式为:
(4)
式(4)中:i表示结构的第i个特征值,
(I = 1, 2, 3, … , n)表示各阶的固有频率。
当固有频率为式(4)的重根时,代入下列方程:
(5)
即可求得各阶振型,其中
表示结构第i阶的振型。
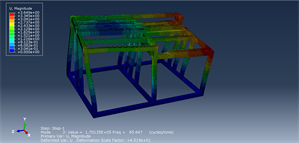
4.2. 无机头机架模态分析
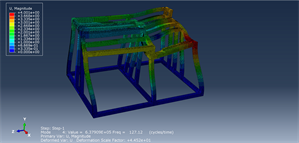
通过设置前处理及边界条件等,无机头机架的前6阶振型如图5所示。根据振型图可以看到,第一阶模态频率为50.078 Hz,第二阶模态频率为50.972 Hz,表现为上部梁整体有向左弯曲趋势;第三阶频率为65.647 Hz,主要表现为左边梁向左弯曲,右边梁向右弯曲;第四阶频率为127.12 Hz,左右两边梁绕中间纵梁发生弯曲,中间最前面竖梁有扭转趋势;第五阶频率为158.17 Hz,从图中可以明显看出中间横梁与纵梁的交点处发生弯曲、扭转变形,第六阶频率为223.43 Hz,向上弯曲变形主要发生在左边第一根、第二根横梁中间。

(a) 1阶 (b) 2阶
 (c) 3阶 (d) 4阶
(c) 3阶 (d) 4阶
 (e) 5阶 (f) 6阶
(e) 5阶 (f) 6阶
Figure 5. Mode shapes of the no head rack from 1st to 6th order
图5. 无机头机架的前六阶振型图
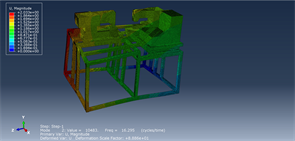
4.3. 有机头机架模态分析
因为钉扣机、锁眼机、振动盘是现有的机器,不需要对此进行分析,故在进行机架的模态分析时可以把此三部分看作机架的一部分,有机头机架的振型图如图6所示。第一阶频率为31.966 Hz,整体向右弯曲变形;第二阶频率为33.274 Hz,整体有轻微变形量;第三阶频率为41.649 Hz,整体有向左弯曲变形表现;第四阶频率为111.21 Hz,上部中间纵梁发生扭转变形,中间竖梁有向右弯曲与扭转变形;第五阶频率为139.35 Hz,弯曲变形主要发生在前面的几根梁上;第六阶频率为167.96 Hz,最大位移变形量主要集中在中间纵梁与其他横梁的连接处,中间纵梁和其他横梁发生扭转弯曲变形。


(a) 1阶 (b) 2阶;

 (c) 3阶 (d) 4阶
(c) 3阶 (d) 4阶
 (e) 5阶 (f) 6阶
(e) 5阶 (f) 6阶
Figure 6. Mode shapes of the have head rack from 1st to 6th order
图6. 有机头机架的前六阶振型图
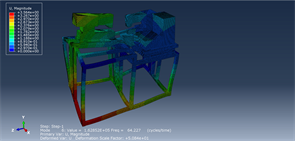
4.4. 有机头有垫片机架模态分析
在有机头机架的下面四个支撑点处添加2 mm厚的垫片,约束条件施加在垫片上,得到的模态振型图如图7所示。第一阶频率为4.2108 Hz,第二阶频率为16.295 Hz,第三节频率为27.095 Hz,机架在前三阶主要为竖梁的轻微弯曲变形,位移变化量最大的地方主要发生在左边竖梁;第四阶频率为34.586 Hz,能够看出左右两边以中间为中心发生向里对折和交错扭转变形;第五阶频率为47.145 Hz,以中间纵梁为中心向外对折弯曲变形;第六阶频率为64.227 Hz,左边最里最外的两根竖梁以纵梁中间为中心,向两侧发生弯曲变形,最下面纵梁向上弯曲变形并且位移变化量也最大。

(a) 1阶 (b) 2阶

 (c) 3阶 (d) 4阶
(c) 3阶 (d) 4阶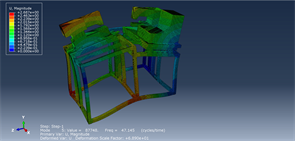
 (e) 5阶 (f) 6阶
(e) 5阶 (f) 6阶
Figure 7. Mode shapes of the have head rack and shim from 1st to 6th order
图7. 有机头有垫片机架的前六阶振型图
4.5. 三种机架仿真结果对比分析
将三种不同类型的机架前六阶固有频率仿真结果整合,如表2所示。
Table 2. Three different types of rack simulation results
表2. 三种不同类型的机架仿真结果
通过对三种不同类型的机架进行约束模态分析可得知,随着模态阶数的增加,机架的固有频率呈递增趋势,但根据有无机头与垫片的因素,三种机架的固有频率在每一阶都呈递减趋势。
观察有机头与无机头机架的固有频率,随着阶数的增加,固有频率差值越大,这是因为机架在加上机头时,整体质量增加,振型幅度变小,并且机头不是规则的形状,具有弯曲与曲线部分且挠度比较大,这种复杂的形状会使振动模态呈现较低的频率。而无机头的机架相对来说质量较轻,并且由形状规则的梁组成,材料弹性模量较大,故会产生较高的频率。
通过表格可以看出有机头并且机架下面四端支撑点有垫片的机架模态固有频率比有机头的固有频率更小,尤其是第一阶差了7倍多,这是因为无垫片机架是把四端全约束,约束都施加在梁的底部,机架较难产生弯曲变形,并且没有可以缓冲冲击的其他结构,故产生较大的频率。有垫片的机架因为约束都施加在垫片上,垫片能够缓冲内部激励带来的冲击,使其他梁都能够较小的发生弯曲变形,并且机头在机架上,总质量变重,这些都有助于结构产生较低的模态频率。
5. 结论
本文根据市面上现有的自动喂扣钉扣机、锁眼机,通过设计自动给料装置、自动送料装置、自动定位装置、自动上料装置、自动下料装置和自动收料装置集成一台钉扣锁眼一体机,能够实现同时完成钉扣、锁眼动作,满足企业要求。用ABAQUS有限元仿真软件对机架进行静力学分析,判断机架的设计是否满足设计要求,通过应力云图与位移云图显示,机架的最大应力远小于材料的许用应力值,故符合实际设计要求。最后又对三种不同类型的机架进行模态仿真分析,通过对比分析发现,第三种有机头有垫片的机架前六阶固有频率相对于前两种机架来说更小,变形更小,这对后续评估一体机结构的振动特性、发现结构中的薄弱环节、以及是否会发生共振问题等提供理论依据;根据三种不同类型的机架计算结果,无论是对一体机的结构优化,还是对其他纺织机器的结构设计,在材料的选择、结构调整、机架及组件设计能够提供参考。
基金项目
浙江省2023年度“尖兵”“领雁”研发攻关计划(2022C01SA111123),国家自然科学基金资助项目(51475434)。