1. 引言
铁路或公路边坡的滑坡灾害,严重影响道路安全,由于其具有强烈的突发性、高度隐蔽性等特点,传统的人工巡检方法难以实现对滑坡灾害的及时感知与预警 [1] ,因此寻求更有效的监测手段成为了地质灾害防控工作的一个重要方向。
目前的室外位移监测多使用GPS技术,但利用GPS对滑坡进行组网监控面临费用高、功耗大等问题。超宽带(UWB)技术的进步为高精度区域定位提供了一种创新性的替代方案 [2] [3] ,该方案可作为GPS的补充或替代,UWB通过短暂的脉冲信号传输数据,这些脉冲具有低功耗、高安全性和低干扰等特性,可以方便地组成无线传感网络,进行位置测量和信息传输。
基于UWB传感器的位移测量系统通常需要3个以上的固定UWB测量基站配合,方可测定被测的移动UWB模块位置,这些移动UWB模块被称为标签。在坡面形变监测领域,在坡面四周布置UWB基站,在坡面上部署多个标签点位,可较为方便的直接结算指出各个标签的绝对位移数据,进而分析出形变情况,但考虑到边坡监测存在地形限制的问题,有时难以实现在基站分布于标签四周,只能架设于坡面一侧的情况,造成测量不准,为了能更好地适应各类测试环境,本文提出基于多个UWB标签模块的分布式坡面形变监测方法,不采用在架设基站测量标签绝对位置的方式,改为依靠多标签模块之前的通信获取模块儿之间的相对位移变化,配合后期数据处理,分析是否产生了严重坡面形变。
2. 基于UWB的滑坡位移测距算法
2.1. 多标签分布式测距系统设计
在一般的UWB测距系统中,可以利用在被测物体四招部署多个固定UWB基站,测量移动的UWB标签的绝对位置 [4] [5] ,如图1所示。基于上述方法,在被测坡面四周部署多个UWB基站,再在坡面上布置多个UWB标签,通过测量UWB标签的绝对坐标判断坡面位移情况是一种较为直接的测量方式,但考虑到部分边坡只有一侧相对安全,无法实现在坡面的四周搭建固定基站,本文设计一个利用多个UWB标签组合位移测距的方法来实现对这类坡面形变的有效监测。
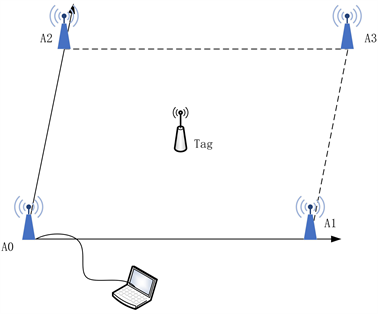
Figure 1. Schematic diagram of UWB fixed base station positioning tags
图1. UWB固定基站对标签进行定位示意图
本文提出的基于多个UWB标签模块分布式算法,不采用在边坡一侧设置基站的方式,依靠多标签模块之前的相对位移变化来做数据处理模型,分析是否产生滑坡;在相对位移的处理算法上,考虑到坡面上的UWB标签设备在产生滑坡的瞬间变化形态均具有异构性,因此各标签之间在产生滑坡的瞬间位移变化曲线关系并不相同 [6] [7] ,本文在此基础上提出在此算法之下的三种位移监测方法,即树状测距、环状测距、网状测距,示意图如图2所示。
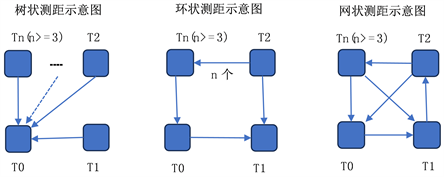
Figure 2. Displacement ranging schematic
图2. 多标签位移测距示意图
2.1.1. 树状测距算法
在多标签中,设置其中一个标签T0作为坡面位移监测的标志点,分别计算处理其他各个标签T1-Tn到该标志点T0之间的位移变化数据,在实验模拟产生滑坡时,实时监测各个标签到标志点T0位移的变化值,并对其监测得到的滑坡位移数据同样进行降噪和数据融合处理分析,得到此算法下的位移滑坡模型;结合示意图可知,此算法在产生滑坡时,作为标志点T0水平面或十分接近水平面的同一直线上的各个标签,变化位移值会趋于平缓,而作为斜对角方向上或十分接近斜对角上的各个标签,位移趋于缓慢下降,且逐步趋于水平方向的标签到标志点T0的位移变化值,作为最明显的标签点,是与标志点T0在同一垂直方向或接近垂直方向上,滑坡过程中,与标志点T0的位移距离值是逐步减少且趋于0。
2.1.2. 环状位移测距算法
将标签T0作为起点,找到下一个临近的标签T1,测距得到两者之间的位移变化值,然后依次连接下一个标签T2,测距得到该T1-T2两标签之间的位移变化值,以此类推,最后得到Tn到起点T0之间的位移变化值,得到环状一圈中依次两个标签之间的滑坡位移变化值,然后分别对滑坡的位移数据进行收集处理,对其监测得到的滑坡位移数据同样进行降噪和数据融合处理分析,得到滑坡数据模型;例如上图示意图展示,分别测得T0-T1、T1-T2、T2-T3以及T3-T4…Tn-T1之间的位移变化;此算法在产生滑坡,作为趋于水平面同一直线上的UWB标签之间的位移变化值趋于平缓,而作为接近竖直方向的UWB标签之间的相对位移距离值是趋于下降状态且逐渐趋于0。
2.1.3. 网状位移测距算法
分别计算所有UWB标签之间的所有滑坡位移变化数据,在滑坡时,实时监测各个标签到各个标签的位移的变化值,并对其监测得到的滑坡位移数据同样进行降噪和数据融合处理分析,得到滑坡位移变化数据模型曲线。结合示意图可知,此算法在产生滑坡时,作为位置为接近水平面同一直线上的两个标签,位移变化值趋于平缓,作为位置为接近竖直方向的两个标签,两者的相对位移距离值是趋于下降状态且趋0,作为斜对角方向的标签之间的位移变化较为平缓略微下降。
同时,在保证硬件条件、使用环境和参数设置不变的前提下,三种位移测距方式在监测得到的滑坡变化数据模型曲线相差并不大。可以看出,第三种网状位移测距,是在前两种树状、环状位移测距基础上,对其他没有进行位移测距得到变化数据的标签,依次进行这些UWB标签两者之间的位移测距,得到所有的滑坡变化数据,以此确保所有标签两两之间都进行了滑坡数据的处理,所有标签都有参与。这种基于多个UWB标签模块分布式滑坡位移测距方法可以有效快速并直接地监测滑坡位移变化,同时也没有忽略各个标签直接位移变化关系。
2.2. 测量数据处理方法
2.2.1. 位移数据平滑去噪
对UWB采集的数据进行处理,是提高数据融合与异常检测效率和精度的关键步骤,本文首先采用了小波去噪方法对滑坡位移数据进行预处理。
UWB采集的位移数据的平滑去噪过程涉及将位移变化视为趋势项和噪声项的组合过程,并通过去噪处理移除信号中的噪声成分以提取真实的变化值,从而优化数据处理与分析的效果。具体来说,通过平滑去噪与变换将原始信号分解为高频和低频两部分,通常噪声成分存在于高频部分中,通过设定特定的门限阈值来移除高频成分中的噪声,然后使用逆变换方法重构去除噪声后的高频和低频部分,以得到最终的平滑去噪信号,这一过程在提高滑坡监测数据分析精度方面起到了关键作用。
因此本文釆用了Daubechies小波进行平滑去噪 [8] ,本文选择分解层数为3,阶数为10,阶数越大数据处理越平滑,并采用Matlab实现数据预处理。
2.2.2. 集中式卡尔曼数据融合
通过运用卡尔曼滤波对坡面部署的多个UWB标签收集到的位移信息进行数据融合,可以构建出滑坡整体的位移变化模型,从而得到边坡整体形态变化 [9] [10] 。标准化衰减记忆卡尔曼滤波算法在面对复杂的滑坡地形结构时,其应用效果有所不足,因此本文采用一种集中式自适应卡尔曼滤波数据融合算法进行数据处理。
本文算法在第k个时刻的采样产生的残差序列由卡尔曼滤波算法计算得出,记作
,如式(1)所示,代表了实际值与测量值之间的误差,是评估滤波效果的关键指标。
(1)
在该公式中,
代表测量值向量,而
是与之相关的测量矩阵。
是通过卡尔曼增益矩阵
计算得出的后验估计值。
由此可推其协方差满足:
(2)
公式中的
指的是误差协方差矩阵,而
表示观测噪声矩阵。
依据发散判断原则:
(3)
得出当γ = 1时有严格收敛判据,则使用下式:
(4)
公式中的
代表状态转移矩阵,
是自适应衰减记忆因子,
则表示过程噪声矩阵,这些组成部分共同构成了卡尔曼滤波算法的数学框架,用于处理和分析监测数据。
替代式(2)中的
可得到:
(5)
最后可得自适应衰减记忆因子
表达式为:
(6)
3. 实验结果与分析
3.1. 实验系统
为验证多个UWB标签模块的分布式滑坡形变监测算法的可行性进行仿真实验,在坡面设置4个标签来进行实验验证,利用通信数据得到标签之间的位移值,模拟滑坡采用将标签固定在坡面上,将其进行推动,使其在坡面进行滑行,模拟产生滑坡时标签滑落的过程。使用带有基站的测量系统中测量到的各个标签的位移变化作为真值,用于与本文算法对比。在仿真验证实验中,对其滑坡时间段前后的串口标签所直接采集的大量位移数据集进行收集,然后以文件txt格式存储到Matlab里,方便下一步进行数据模型建立分析。室外实验场景如图3所示。
对标签采集的单项位移数据集进行建模处理,分别对此做出树状、环状、网状监测算法标签位移变化值模型曲线,在此模型上分析此算法在滑坡监测上的可行性。
3.2. 实验结果与分析
3.2.1. 集中式卡尔曼滤波数据融合实验
对此首先对本文使用的集中式卡尔曼滤波数据融合处理方式进行测试。
以坡面的UWB标签模块进行位移数据模拟融合测试实验,分别测距得到标签1和2到目标标签的位移变化值,如表1所示。融合得到的数据对比结果展示如图4所示。
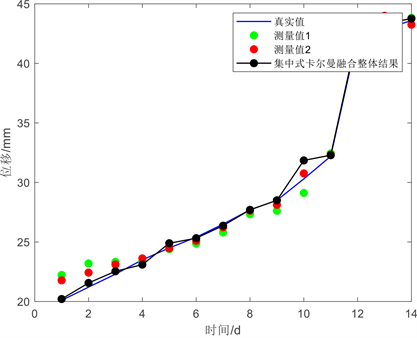
Figure 4. Comparison plot of Kalman fusion results
图4. 卡尔曼融合结果对比图
由测试结果可以看出,应用改进的自适应集中式卡尔曼滤波数据融合算法后,融合数据与真实数据的一致性显著提升,同时保留了大量原始数据信息,有效减少了传感器噪声。
3.2.2. 多UWB标签分布式位移测量实验
本实验分别对树状、网状、树状算法下UWB标签采集的之间滑坡位移数据集进行去噪处理,对各类算法下坡面的所有标签之间的位移数据进行小波去噪处理,得到原始位移数据图与去噪对比结果图;然后在位移数据去噪基础上,对各类算法下的UWB标签之间的位移数据进行卡尔曼滤波融合。最后结合实验结果分析三种算法的优缺点。
1) 树状算法:对数据集进行建模处理,得到树状监测算法标位移值变化,对其数据进行去噪、数据融合,实验结果如图5和图6所示。
实验结果说明在产生较大位移时,标签位移变化与本算法结果有比较的共同性,并且在数据融合算法之后的总体结果数据图中更能看出,在产生滑坡时,此算法较好地反映到滑坡数据变化总体形势,对数据进行处理之后说明此算法在仿真滑坡测试实验中比较有可行性,但只有一个相对标签位移变化明显,有局限性,不能单独仅依靠此算法判断滑坡,需要进一步进行算法比较。
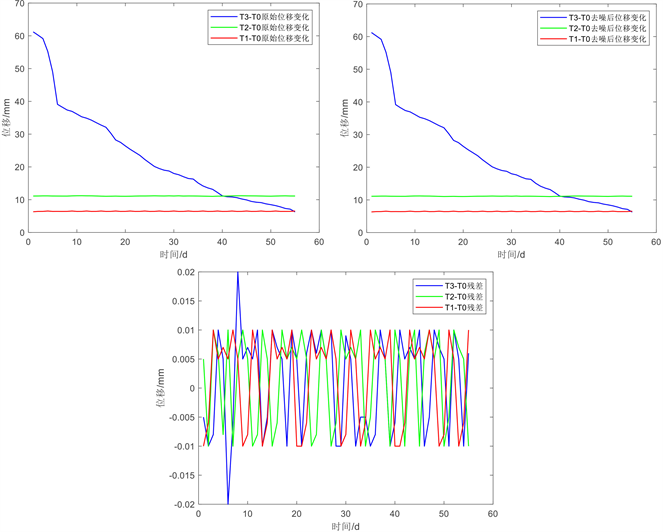
Figure 5. Comparison of wavelet denoising for tree monitoring displacement
图5. 树状监测位移小波去噪对比图
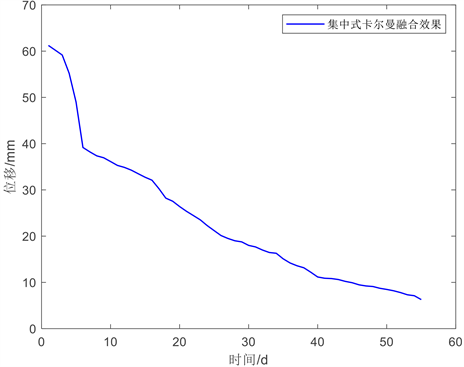
Figure 6. Centralized Kalman filter fusion results
图6. 集中式卡尔曼滤波融合后的树状位移测试结果
2) 环状算法:对数据集进行建模处理,得到环状监测算法标位移值变化,实验结果如图7和图8所示。
实验结果表明,作为水平面同一直线上的两个标签及例
、
,位移变化值趋于平缓,作为竖直方向的两个标签及示例标签
、
,两者的相对位移距离值是趋于下降状态,环状算法依靠统一竖直面的标签变化,相比较于树状算法,在产生较大位移时,在竖直方向的标签感知变化较多,不局限于单个标签变化,此算法比树状具有说明性。
3) 网状算法:对数据集进行建模处理,得到网状监测算法标位移值变化,对其数据进行去噪、数据融合,实验结果如图9和图10所示。
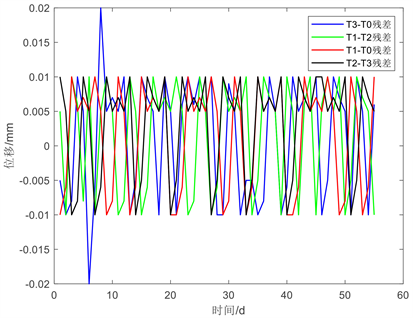
Figure 7. Comparison of wavelet denoising for ring monitoring displacement
图7. 环状监测位移小波去噪对比图

Figure 8. Centralized Kalman filter fusion results
图8. 集中式卡尔曼滤波融合后的环状位移测试结果
实验结果表明,在监测面产生较大形变时,此算法可以很好实时地反映到位移数据变化总体形势,由此验证此算法在滑坡时所采集的数据较为准确,对数据进行处理之后说明此算法在仿真滑坡测试实验中比较有可行性。
通过对三种算法模型的监测效果分析,三种方法相辅相成,其中各自都可以单独来判别滑坡,也可互相作为加成判定条件,可以相互作为验证算法,加强滑坡监测的准确性。

Figure 9. Comparison of wavelet denoising for mesh monitoring displacement
图9. 网状监测位移小波去噪对比图

Figure 10. Centralized Kalman filter fusion results
图10. 集中式卡尔曼滤波融合的位移测试结果
4. 结论
本文提出基于多个UWB测量单元分布式测量的形变监测算法,可在不需要布置UWB基站的情况下,仅根据各个标签之间地相对位置关系,解算并得到形变信息。实验表明,综合利用本文提出的三种解算算法组合分析监测滑坡形变数据变化,能够在无UWB基站的情况下,更准确的监测坡面形变。
基金项目
辽宁省教育厅青年项目JYTQN2023058;辽宁省科技厅计划项目2022JH1/10800085;沈阳理工大学科研启动支持项目1010147001003。
NOTES
*通讯作者。