1. 前言
目前,高等院校开设的机械类课程(比如机械原理、机械设计、机械设计课程设计等课程)教学过程中运用的设备主要是以实物教具以及多媒体电教设备为主 [1]。现在随着新工科理念的推出,不仅对学生理论要求更高了,而且对学生的动手能力也提出了更高的要求,因此,需要采取新型的教学方法。慧鱼组合模型主要是利用工业标准的基本构件(机械元件/电气元件/气动元件),辅以传感器、控制器、执行器和软件的配合,实现各类机器的模拟。由于能够将虚拟模型过渡到实物模型,因而可以有效地服务于实践教学,提高学生的应用动手能力 [2]。
本文以“机械设计课程设计”中的一项设计任务为例,介绍慧鱼模型在教学实践中是如何应用的。设计任务是以智能停车装置为主题,学生可根据功能要求,自己进行方案设计,并将设计方案通过慧鱼组合模型完成实物装置的搭接,并能够结合模型中的控制系统完成功能的实现,通过模型的真实工作过程,验证并改进设计方案。
2. 整体设计
2.1. 整体设计效果
随着人类社会的进步和科学技术的发展,人们的生产、生活方式趋于集中,城市的规模越来越大,人们在城市里的生存空间却越来越小,于是出现了要合理利用空间的理念,所以城市开始建设立体建筑、立体交通和立体停车。车库和停车楼组合的实施,是解决城市立体建筑和立体交通作为现代大都市的标志,它们都有了显著发展 [3]。然而,汽车泊位与汽车数量的比例严重失调,这带来了停车难、违章停车、停车管理困难等一系列问题。为解决这些问题,发展立体停车库已成为人们的共识。
图1为学生通过慧鱼组合模型搭接的一种停车装置——无避让智能立体车库。无避让智能立体车库整体由四连杆上升机构、载车台旋转机构、齿轮齿条平移装置、链传动机构、人车误入装置、光电报警装等组成。本设备是一款成本低、适应性强、方便快捷的简易停车装置。它是利用平行四边形机构中四个杆处于一条直线位置时动件的运动不确定性来完成的,其特点是相对杆始终保持平行,且两连杆的角位移、角速度和角加速度也始终相等;当多个平行四边形机构叠加在一起使用时,能起放大位移的作用。

Figure 1. Overall drawing of intelligent three-dimensional garage without avoidance
图1. 无避让智能立体车库整体图
2.2. 机构分析
1) 升降机构:当车主将车辆开上载车台后,由卷扬机装置提供动力带动四连杆机构将车辆缓慢提升到指定位置,见图2。
2) 载车台旋转平移机构:载车台先由齿轮齿条构成的平移机构平移到指定位置,再由旋转装置的电机带动旋转台旋转,将横向的汽车转向变为纵向,见图3。节省了停车空间,使得停车装置既可以单独使用又可以集成使用,极大的提高了停车装置的适用范围。
3) 断链防坠机构
任何零件和装置都有使用寿命,停车装置在任何工作期间都会有发生安全事故的可能,因此必须做好防护措施。升降机构配套安装的防止链条断裂后车板和其负荷的车坠落的装置。采用了断链后内置弹簧加压楔块使摩擦块向外膨胀,与立柱接触产生了极大的摩擦,减缓和阻止载车板的下坠运动,结构精巧,借力使力,反应敏捷,利用摩擦自锁原理迫使载车板下坠运动停止,配套在停车设备中使用时更安全可靠,结构简洁适用 [4]。在电控系统完全失电和断丝、断链的情况下启动防断链保护装置,防止载车台突然坠落造成财产损失。
4) 人车误入装置
为了避免在存取车的过程中道路上的行人和车辆突然闯入停车装置的工作区,我们专门为停车装置配备了人车误入装置,在存取车期间,声光提示装置工作,提醒行人和过往车辆注意安全,当行人和车辆闯入工作区时,停车装置立即停止工作,从而保障行人和过往车辆的安全 [5]。
2.3. 存取车工作过程
停泊上层车辆→车主按下存车按钮→人车误入装置检测→声光提示系统打开→载车台平移(齿轮齿条)→载车台旋转→载车台下降(四连杆机构)→驾车入载车台→车主下车按下启动按钮→载车台上升(四连杆机构)→载车台旋转→载车台移动(齿轮齿条)复位→停车完毕
取上层车辆→车主按下取车按钮→人车误入装置检测→声光提示系统打开→载车台平移(齿轮齿条)→载车台旋转→载车台下降→驾车驶出载车台→载车台上升(四连杆机构)→载车台旋转→载车台移动复位(齿轮齿条)→取车完毕
存取车实际工作过程如图4所示。
3. 程序设计
3.1. 控制流程图
采用逻辑控制的方式,当按下存车启动键后,存车程序启动,人车误入装置传感器和光电警示指示灯启动,如无报警,则进行下一步动作,载车板横移出库,旋转90˚;如果此时有报警,设备停止动作,等待报警解除后,载车板继续下降,下降到位后,驾驶员将车辆开到载车板上,离开车辆到安全位置后,再次按下存车启动键,载车板进行回收。上层车辆存车控制流程图见图5。
取上层车辆控制流程图与上层车辆存车控制流程图类似,见图6,在此不再重复解释。
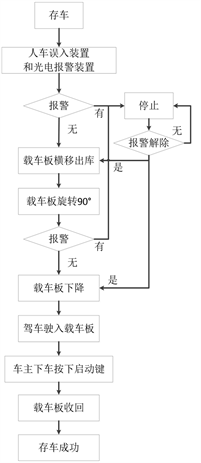
Figure 5. Flow chart of vehicle storage control
图5. 存车控制流程图
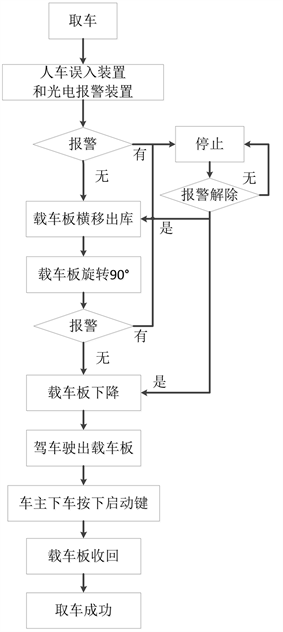
Figure 6. Vehicle pickup control flow chart
图6. 取车控制流程图
3.2. 控制程序设计
见图7,停泊上层车辆控制程序流程:车主按下存车按钮1,若载车台正在运行或载车台上有车,原运动不会受到干扰继续原来的操作。按下按钮1时,若载车台静止不动且载车台内无车,人车误入装置检测(I5和I6)和声光提示系统(I1和I2)打开,延时0.5秒后载车台平移出库,载车台左转90˚,延时0.2秒,载车台下降,车主驾车驶入载车台,车主下车按下启动键2,延时0.3秒,此时程序对人车误入装置检测和声光提示系统传感器进行检测,若符合载车台上升条件,延时0.5秒后,载车台上升,上升到位后延时0.2秒,载车台右转90˚,载车台复位,停车完毕 [6]。
取上层车辆控制程序流程与停泊上层车辆控制程序相反,大体程序类似,在此不再重复解释。
由图8可知,声光警示控制程序流程:若按钮M1、M2、M3被按下,声光警示灯以1秒(0.5秒亮、0.5秒灭)为一周期进行循环。
由图9可见,人车误入控制程序流程:若检测到在存取车的过程中道路上的行人和车辆突然闯入停车装置的工作区内的传感器(O7和O8)有信号产生,声光提示装置立即停止工作;在存取车期间,声光提示装置正常工作,提醒行人和过往车辆注意安全 [7]。

Figure 8. Audible and visual warning procedure
图8. 声光警示程序
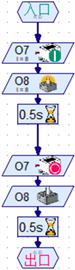
Figure 9. Procedures for people and vehicles entering by mistake
图9. 人车误入程序
综上所述,该设备具备的创新点有:停泊上层车辆时,无需下层停泊车辆避让,极大的减少了车辆停泊的时间,停车方便快捷;产品安装简单快捷,可任意迁移,搬迁安装容易,可根据实际地面情况,安置一台或多台停车设备 [8];配备有防坠装置,保障安全;不仅可以通过手机APP停取车,还可以通过扫描二维码的形式停取车 [9]。
4. 结语
采用慧鱼模块化构件搭建的无避让智能立体车库,在实践中验证了方案的可行性,可用于实验教学和企业示范展示,其设计方案和理念对实际无避让智能立体车库的设计制造具有一定的借鉴指导意义。在教学中引入慧鱼模型后,为学生创造了良好的教学实验环境,激发了学生的学习兴趣,提高了学生的实际动手能力,不少学生利用慧鱼模型参加各类学科竞赛并取得了优异成绩,也为学生提供一个创新平台,培养了学生自主创新意识和解决问题的工程能力。同时,为普通院校“机械设计课程设计”的教学提供了一种可行性的借鉴方案。
基金项目
重庆市教育委员会教改项目“实验室开放实践教学模式探究——以木制拼装玩具模型设计项目为例(项目编号:213310)”。