1. 引言
三维激光扫描技术是近年来兴起的新技术,它是利用激光测距的原理,通过记录被测物体表面大量密集点的三维坐标、反射率和纹理等信息,可快速复建出被测目标的三维模型及线、面、体等各种图件数据。由于三维激光扫描系统可以密集地大量获取目标对象的数据点,因此相对于传统的单点测量,三维激光扫描技术也被称为从单点测量进化到面测量的革命性技术突破。近年来,随着三维激光扫描技术应用的不断发展和探索,该测绘技术已经在各个领域得到广泛应用 [1] ,并在一些重大工程项目中起到关键性作用。
三维激光扫描技术应用扩展的同时,也浮现出一些典型问题,如在项目汇报中成果的精度往往会被提及,但实际可能连技术人员本身都无法给出一个合理的确切数值,软件中存在的误差分析环节仅仅是对拼接站之间的误差评定,因此如何对点云成果的精度进行准确评定显得尤为突出和必要。
在建设工程领域,按照测量任务所要求的精度,测定一系列控制点的平面位置和高程,建立起工程测量控制网,控制网具有控制全局、限制测量误差累积的作用。本文将以实际项目为例,详细阐述将三维激光扫描与控制测量技术结合,作为评定三维激光扫描成果精度的方法,同时提出一种简化的精度控制方法,为后续的技术应用及研究提供参考和借鉴。
2. 三维激光扫描精度评定现状
三维激光扫描仪单测站精度评定时,主要考虑的是仪器的标称参数,表现为测距精度和测角精度。在不考虑偶然误差的前提下,扫描精度与目标距离、角度息息相关,而点位精度是测距精度及测角精度的综合反映。由于点位精度的真值难以进行复核确认,因此目前计量院方面主要对三维激光扫描仪的测距精度进行试验校准。
三维激光扫描的测距精度标识和传统全站仪等测量仪器进行了统一,即测距精度表达式为(A + Bppm × D) mm,其中A代表仪器的固定误差,代表不管测量的实际距离多远,测量仪器都将存在不大于该值的固定误差;Bppm × D公里代表比例误差,其中B是比例误差系数,随着实际测量距离的变化,仪器的比例误差部分也按比例发生变化。需要注意的是,标称测距精度并不是实际测距精度,而是中误差极限的概念,可以理解为仪器的测距误差不会超过这个标称测距精度值。
将几种主流的Lecia三维激光扫描仪和全站仪的标称精度参数进行汇总,见表1所示,可以看出,目前三维激光扫描仪的测距精度在数百米范围内基本可以达到全站仪的水平,但在测角精度上有较大的差距。

Table 1. Nominal accuracy of scanner and total station
表1. 扫描仪及全站仪的标称精度
三维激光扫描的多测站精度评定时,目前没有一个可靠的方法,基于软件的误差报告仅仅表达测站间的拼接误差,无法反映整体数据模型真实的测量精度。
3. 三维激光扫描与控制测量结合
针对多测站点云成果精度无可靠评定的空白,利用控制测量可以合理分配误差并评定精度的技术特点,将三维激光扫描与控制测量结合,使三维扫描成果能够有一个准确、合理的精度评定。在建筑测绘项目中,通过全站仪根据场地地形及既定目标制作适配的导线,同时采用水准仪进行高程控制测量,形成高精度平面、高程控制网;将导线控制点布设在每一个扫描测站之中,导入控制点坐标对点云数据进行纠偏和调整,继而以导线的精度来评估三维扫描成果的精度。三维激光扫描与控制测量结合的主要流程如图1所示。
3.1. 案例概况
水泥库(八连筒)位于浦东水泥厂厂区东北侧,设计于1983年,东西向总长约为51 m,南北向总宽约为21 m,总建筑面积约为1250 m2,主体由筒仓和提升机房两部分组成,设有变形缝,目前提升机房已被拆除。水泥库采用钢筋混凝土筒仓结构,由2排4列,共8个内径为10 m的标准单仓组成,壁厚为200 mm,仓下高度为4.5 m,仓体高度为25 m。建筑原作为水泥存储及运输用房使用,近期业主拟对其进行改造 [2] 。水泥库外景如图2所示。
本次改造设计采用清水混凝土内墙面,因此涉及清水混凝土的模板施工问题,由于水泥库整体墙面为弧形,对模板的精度有了更高的要求,考虑到建筑物筒仓壁本身存在分段式的倾斜偏差,专家认为需要在施工前对筒仓各部位的倾斜现状有一个准确的评估,进行适当的先期处理,以此避免施工后由于偏差导致的模板返工及工期延误;设计方则提出希望得到一个精度可以达到10 mm以内的整体数据模型供方案调整使用。根据上述要求,采用Lecia RTC360型三维激光扫描对水泥库进行整体三维数据采集,规划闭合导线并布置相应控制点,采用Lecia TS16型全站仪和Trimble DiNi03型水准仪分别对平面及高程进行控制测量,将控制点导入点云数据中进行整体纠偏,最终实行对水泥库点云成果的精度控制和评定。

Figure 2. Exterior of the cement warehouse
图2. 水泥库外景
3.2. 现场作业
1) 现场踏勘
由于水泥库周边场地较为开阔,因此确定采用闭合导线。现场已知A、B 2个绝对坐标,设计一个连续折线的大致走向,基于两点间通视良好,点位分布均匀的原则,结合三维激光扫描测站范围和针对水泥库上部数据采集的仰角需要,选择出合适的控制点位,控制点采用三维激光扫描软件可以自动识别的黑白标靶进行地面固定。控制点布置方案如图3所示。
2) 导线测量及水准测量
导线测量采用全站仪按测回法进行转折角和导线边长的观测,导线与绝对坐标(已知点)连接时,需要测出各连接角,本次观测主要采用三联脚架法;水准测量与导线测量共用控制点,采用电子水准仪和条码式铟钢尺,从绝对坐标(已知点)出发,沿路线对控制点进行水准测量,最后回到原来的已知水准点上,形成闭合环线。
3) 三维激光扫描数据采集
三维激光扫描现场扫描前,首先要确定后续拼接的方式,由于最后的数据都要通过控制点进行纠偏,因此拟定采用现场作业较为方便的视图拼接方式,即两测站之间有足够的重合率即可。根据已知点和控制点的个数在现场架设6个测站,保证每一个测站都需要扫描到一个控制点,为确保软件后续对标靶有足够的识别度,因此把每一个测站均布置在控制点的附近,按照导线的路径结合控制点的位置将所有的数据采集完成。扫描测站位置如图4所示。
3.3. 数据处理
将导线测量数据导入平差软件中进行计算 [3] ,导线路径为:A-B-5-4-3-2-1-B-A,总边长为169.591 m,平均边长为28.265 m,全长相对闭合差k = 1/105,008,限差 = 1/55,000,因此导线测量结果满足要求。由计算结果可知:控制点的最大点位中误差为3.8 mm,最小点位中误差为2.3 mm,平均点位中误差为3.1 mm。将水准测量数据导入平差软件中进行计算,水准路径为2-1-B-5-4-3,总长度为140 m,高差闭合差为−0.19 mm,限差为1.28 mm,因此水准测量结果满足要求。由计算结果可知:控制点的最大高程中误差为0.09 mm,最小高程中误差为0.07 mm,平均高程中误差为0.082 mm。控制点成果汇总详见表2。
Table 2. Control point results summary
表2. 控制点成果汇总
将三维扫描数据导入cyclone软件后,在单测站内对控制点标靶进行自动识别及命名 [4] ,随后进行视图拼接,去噪后得到整体三维点云模型,如图5所示。将平面及高程控制点坐标进行整理汇总,编写入txt文件,将坐标名称与标靶控制点名称进行统一,将坐标文本和点云数据同时导入,其中以坐标文本为基站,进行数据融合,得到由控制点纠偏后的点云数据模型,点云成果经复核后确认与控制点坐标一致,因此以导线和水准测量的精度对三维扫描数据进行评定,即平面上的平均点位中误差为3.1 mm,高程上的平均点位中误差为0.082 mm。
4. 一种简化的精度控制方法
在既有建筑测绘项目中,由于主要的目标对象是建筑物而不是地形,且不涉及新建的项目大都没有完整的图纸资料 [5] ,往往无法获得绝对坐标,同时由于场地和环境条件的限制,使得导线的布设工作难以实施,在上述没有条件进行控制测量的情况下,三维激光扫描的成果精度难以得到有效的控制和保障。
全站仪是目前工程领域应用最广泛的测量仪器,它是集水平角、垂直角、距离、高差测量功能于一体的测绘系统,随着科学技术的不断发展,目前的全站仪已经可以达到极高的角度和距离测量精度,例如徕卡TS60,其测角精度达到了0.5'',测距精度达到了0.6 mm + 1 ppm,可使用在精密工程测量、变形监测以及几乎无容许限差的机械引导控制等应用领域。因此,可以确定的是,采用高精度全站仪在单测站测量的点位坐标具有较高的点位精度。
基于上述理论,提出一种三维激光扫描简化的精度控制方法,主要思路是通过高精度全站仪单测站采集的标靶坐标数据与三维激光扫描的点云模型进行拼接,来对三维扫描的整体点云模型进行纠偏控制。如图6所示,根据目标建筑物拟布置4个三维扫描测站,首先将测站的位置确定下来,在每一个测站周边放置配对的标靶点,综合考虑四个标靶的位置选择一个全站仪单测站可以同时采集到上述标靶的位置,继而进行坐标采集。随后在三维扫描测站扫描时,分别在各测站采用高分辨率扫描配对的标靶点。在数据后处理中,类似三维扫描与控制测量结合的数据处理方法,将单测站采集的标靶点位坐标导入三维扫描点云模型的标靶进行纠偏,以此达到精度控制的作用。
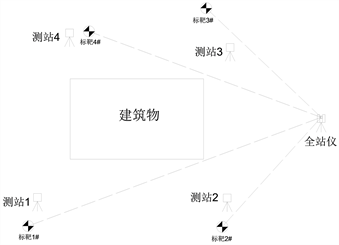
Figure 6. Accuracy control method diagram
图6. 精度控制方法示意图
以水泥库项目为例进行测试,在现场测量时增加测试标靶点cs-1~6,使用Lecia TS16型全站仪(2 mm + 2 ppm, 1''),从已知点B点引出,在建筑物西侧布置测站,如图7所示,采集标靶kz-1~3作为单测站控制点,将扫描测站中包含上述三个点位数据的测站进行拼接,得到整体点云数据模型,把场景中的其余标靶坐标摘取出来,与上述控制测量结合的点云成果中的坐标对应进行比对,详见表3所示,由比对结果可知:六个测试点位的X向偏差在2~5 mm,Y向偏差均为0 mm,H向偏差在2~7 mm,整体偏差较小,因此认为具有一定的精度控制作用。需要注意的是,由于全站仪单测站的测量范围有限,该方法只适用于小区域的三维测绘项目,且无法对扫描成果进行精度评定。
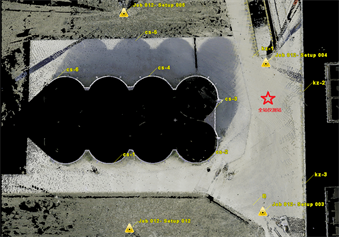
Figure 7. Location of station and target
图7. 测站及标靶布置位置
Table 3. Single station control measurement point comparison
表3. 单测站控制测点比对
5. 结论
1) 提出了控制测量与三维激光扫描技术结合的方法,以水泥库实际项目为例,对主要作业流程进行详细介绍,最终将点云成果的精度评定为平面上的平均点位中误差为3.1 mm,高程上的平均点位中误差为0.082 mm,方法同时兼顾了精度评定和控制的双重作用。
2) 提出了一种简化的精度控制方法,基于高精度全站仪单测站测量的坐标具有较高的点位精度,以单测站扫描的标靶点位坐标对三维点云模型进行纠偏,以此来控制三维扫描点云整体模型的成果精度,同样以水泥库项目为例进行与控制测量结果的测试比对,结果显示,六个测试点位的X向偏差在2~5 mm,Y向偏差均为0 mm,H向偏差在2~7 mm,整体偏差较小,表明该方法具有一定的精度控制作用,但受限于全站的单测站场景测量范围,因此具有局限性。