
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2023, Vol. 44 ›› Issue (10): 3137-3145.doi: 10.12382/bgxb.2022.0557
朱建良*( ), 王立雅, 薄煜明
), 王立雅, 薄煜明
收稿日期:2022-06-22
上线日期:2023-10-30
通讯作者:
ZHU Jianliang*(), WANG Liya, BO Yuming
Received:2022-06-22
Online:2023-10-30
摘要:
基于全球卫星导航系统(GNSS)和行人航位推算(PDR)的组合导航系统是行人导航广泛采用的方案之一。为进一步提高GNSS/PDR组合导航系统的定位精度,提出一种基于图优化的GNSS/PDR组合导航方法。通过构建因子图表示状态和量测信息之间的概率依存关系,过去的所有状态都作为未知量在每一步进行迭代估计,通过最小化整体代价函数获取状态的最优估计。实际场景测试结果表明:与卡尔曼滤波算法相比,新方法能够进一步降低定位的平均误差,提高定位精度;两组实际场景测试的平均水平定位误差都降低了40%以上。实验结果证明了图优化算法可以有效地提高定位精度。
中图分类号:
朱建良, 王立雅, 薄煜明. 行人GNSS/PDR组合导航优化估计方法[J]. 兵工学报, 2023, 44(10): 3137-3145.
ZHU Jianliang, WANG Liya, BO Yuming. Pedestrian GNSS/PDR Integrated Navigation System with Graph Optimization[J]. Acta Armamentarii, 2023, 44(10): 3137-3145.
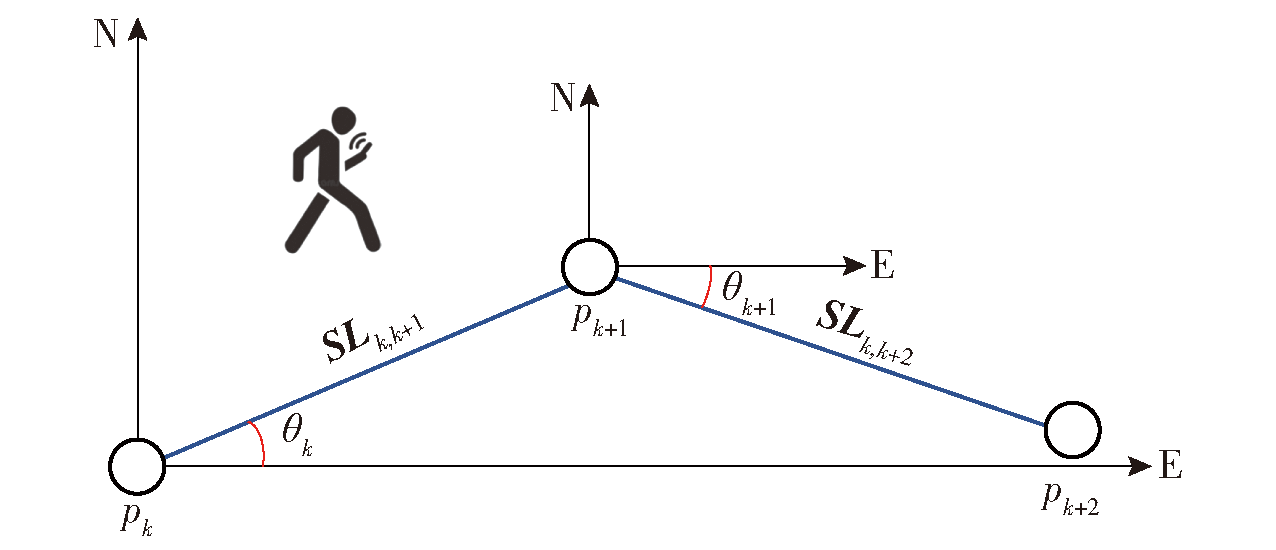
图1 航位推算位置更新原理
Fig.1 Principle diagram of position updating
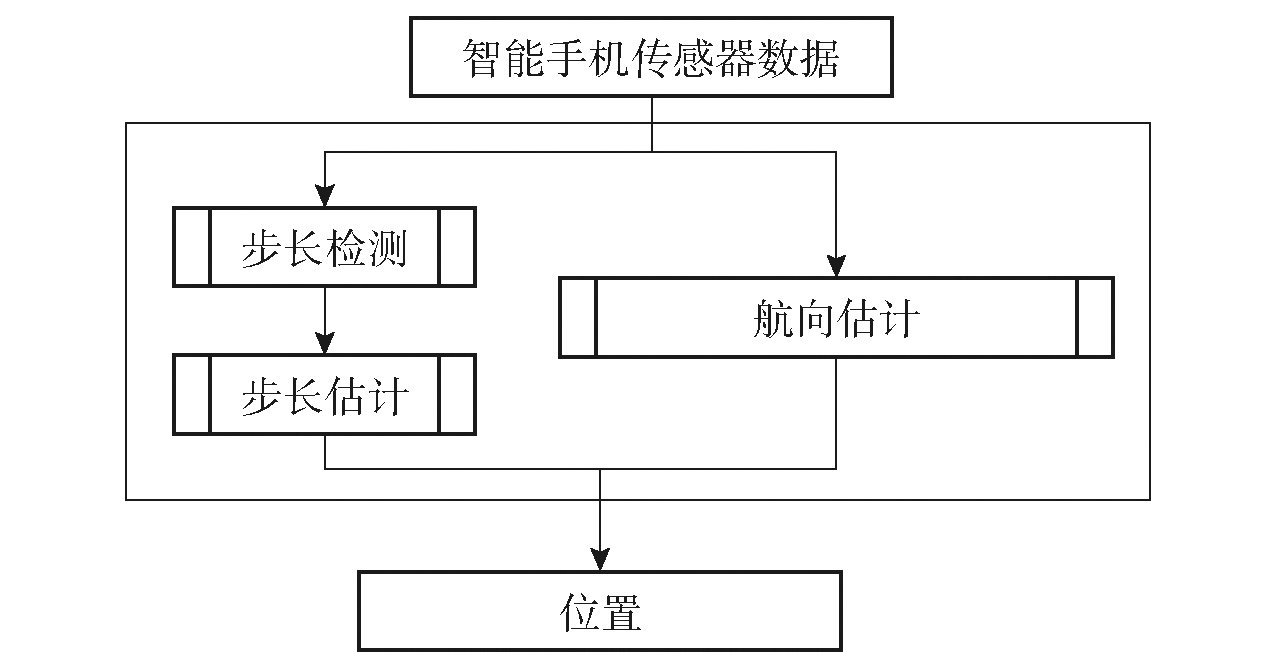
图2 智能手机航位推算原理图
Fig.2 Principle diagram of pedestrian positioning based on smartphone function
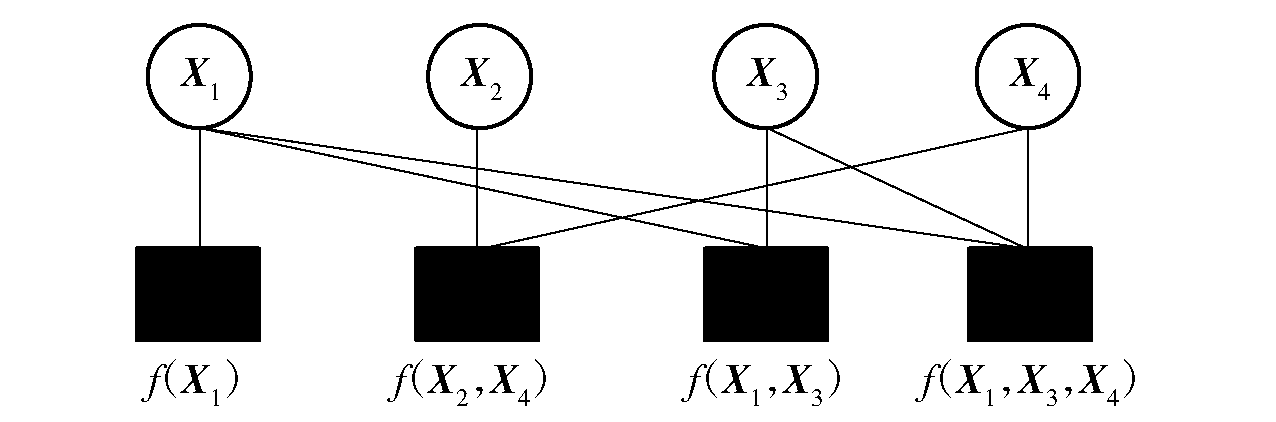
图3 局部函数分解因子图
Fig.3 Factor graph of local function decomposition
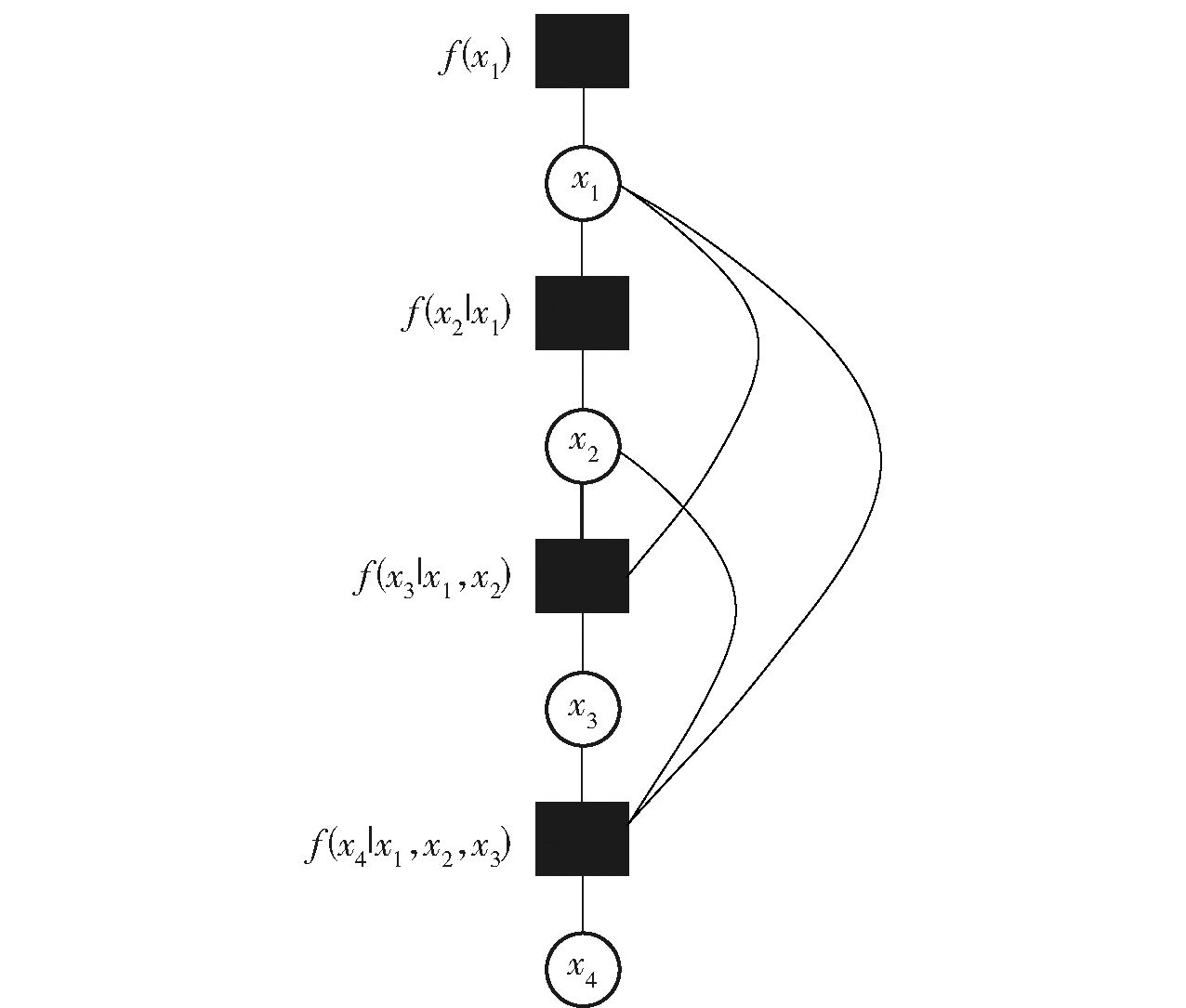
图4 变量依存关系因子图
Fig.4 Factor graph of variable dependency relation
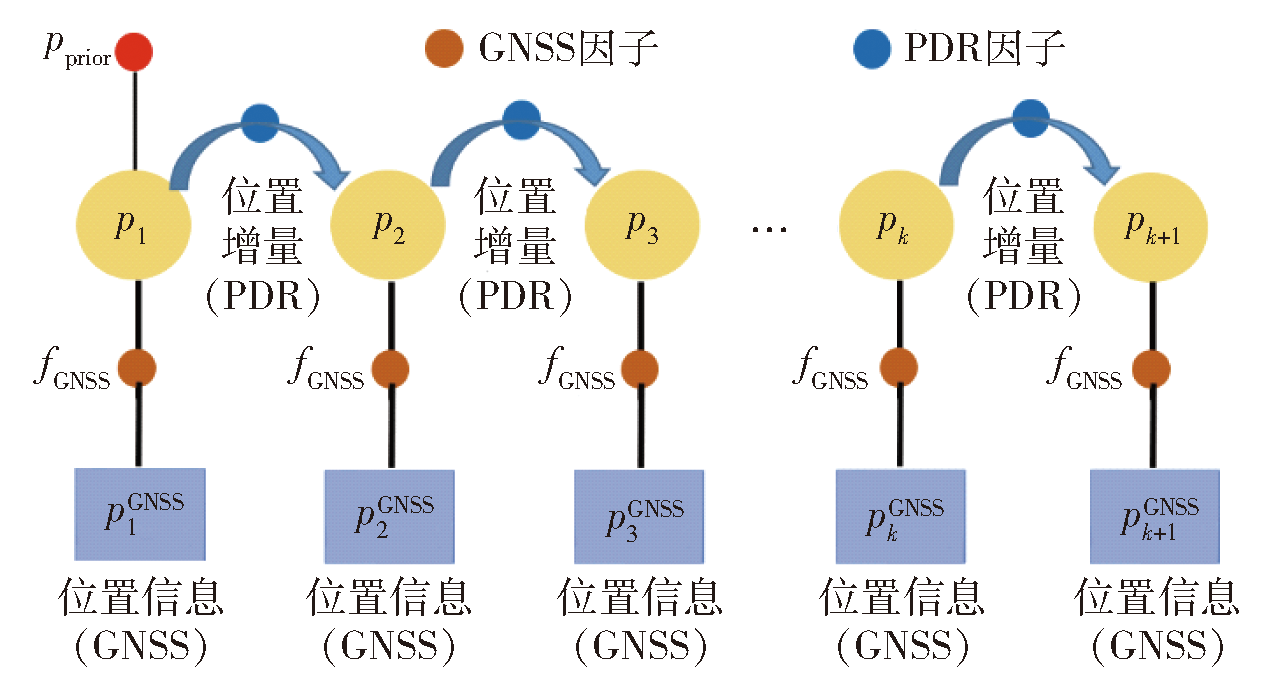
图5 FGO-GNSS/PDR组合导航方法
Fig.5 FGO-GNSS/PDR integrated navigation method
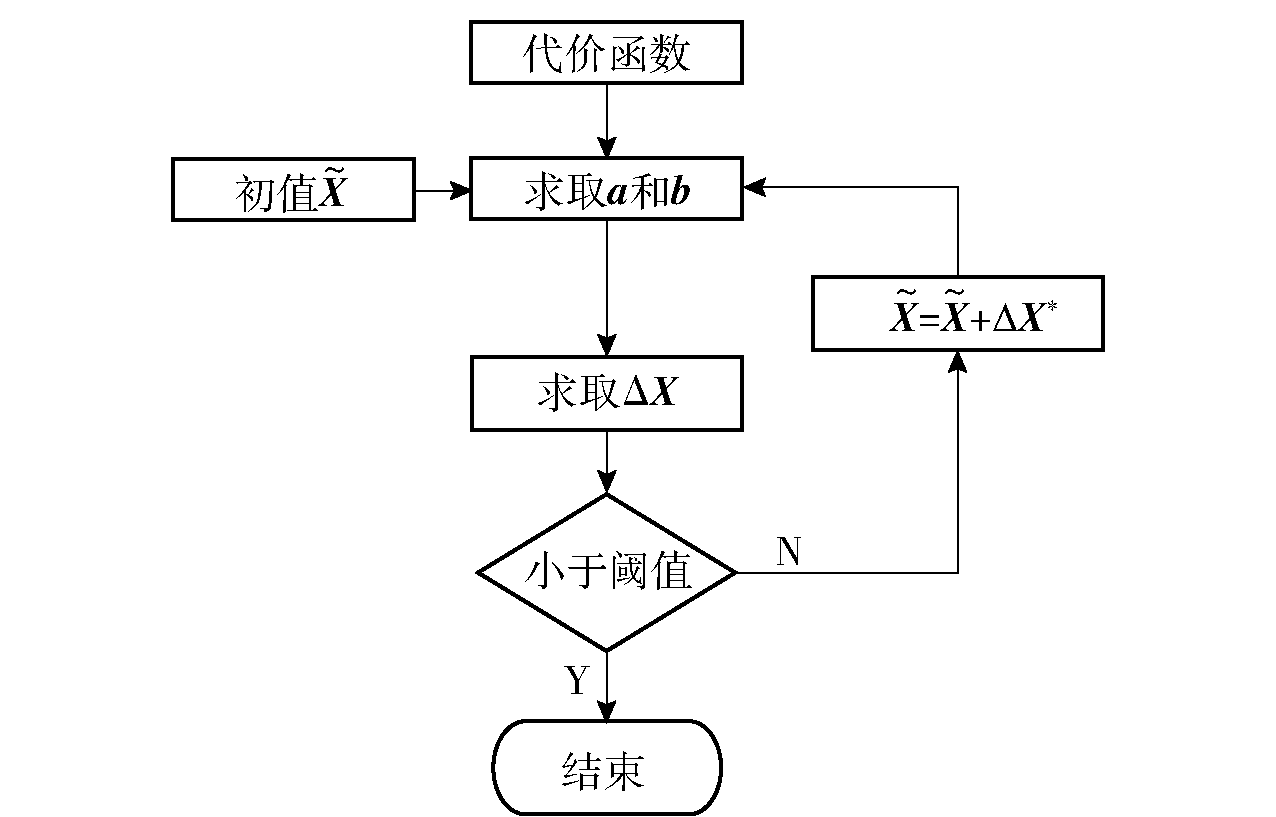
图6 求解过程流程图
Fig.6 Flow chart of the solving process
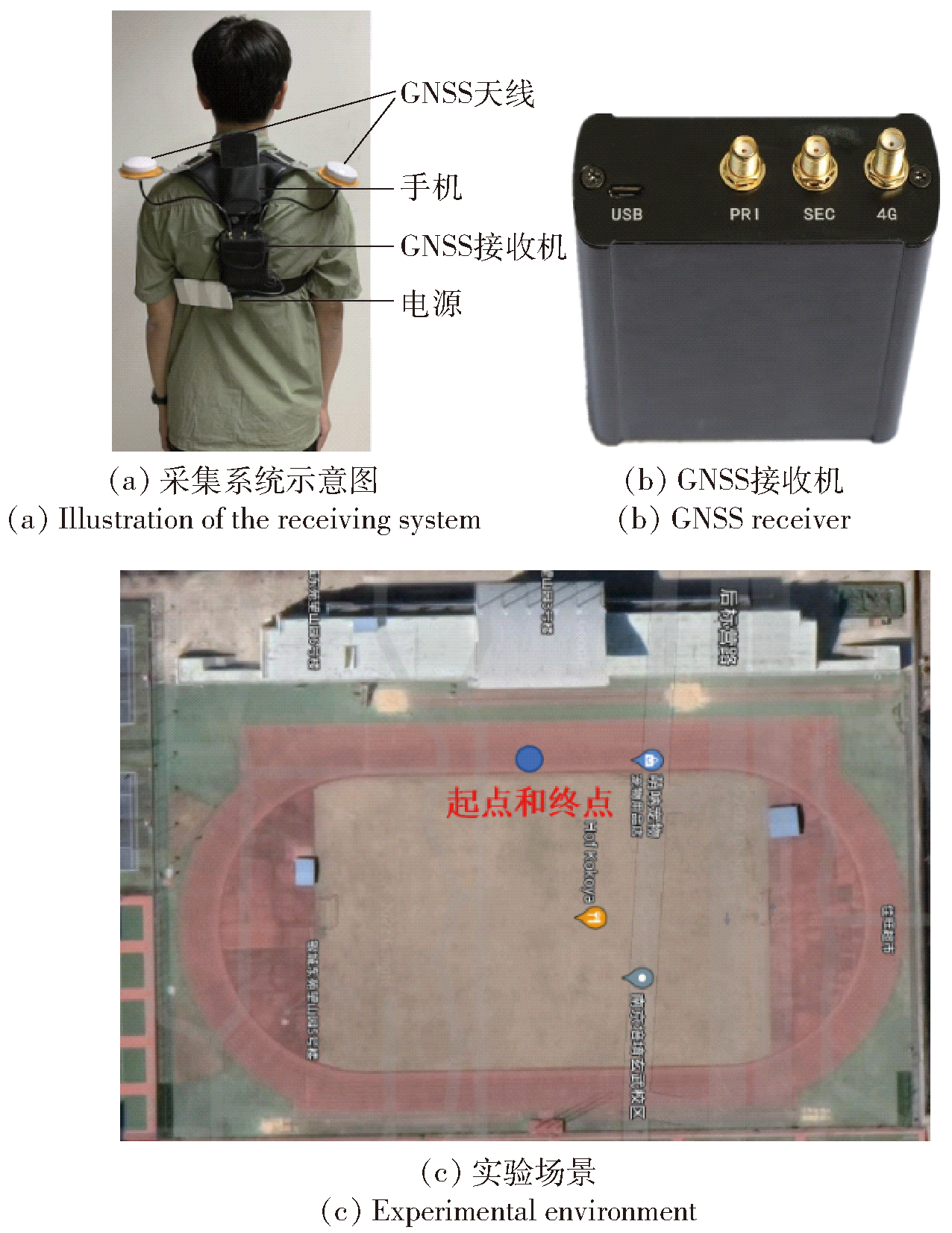
图7 数据采集装置
Fig.7 Dataset collecting equipment
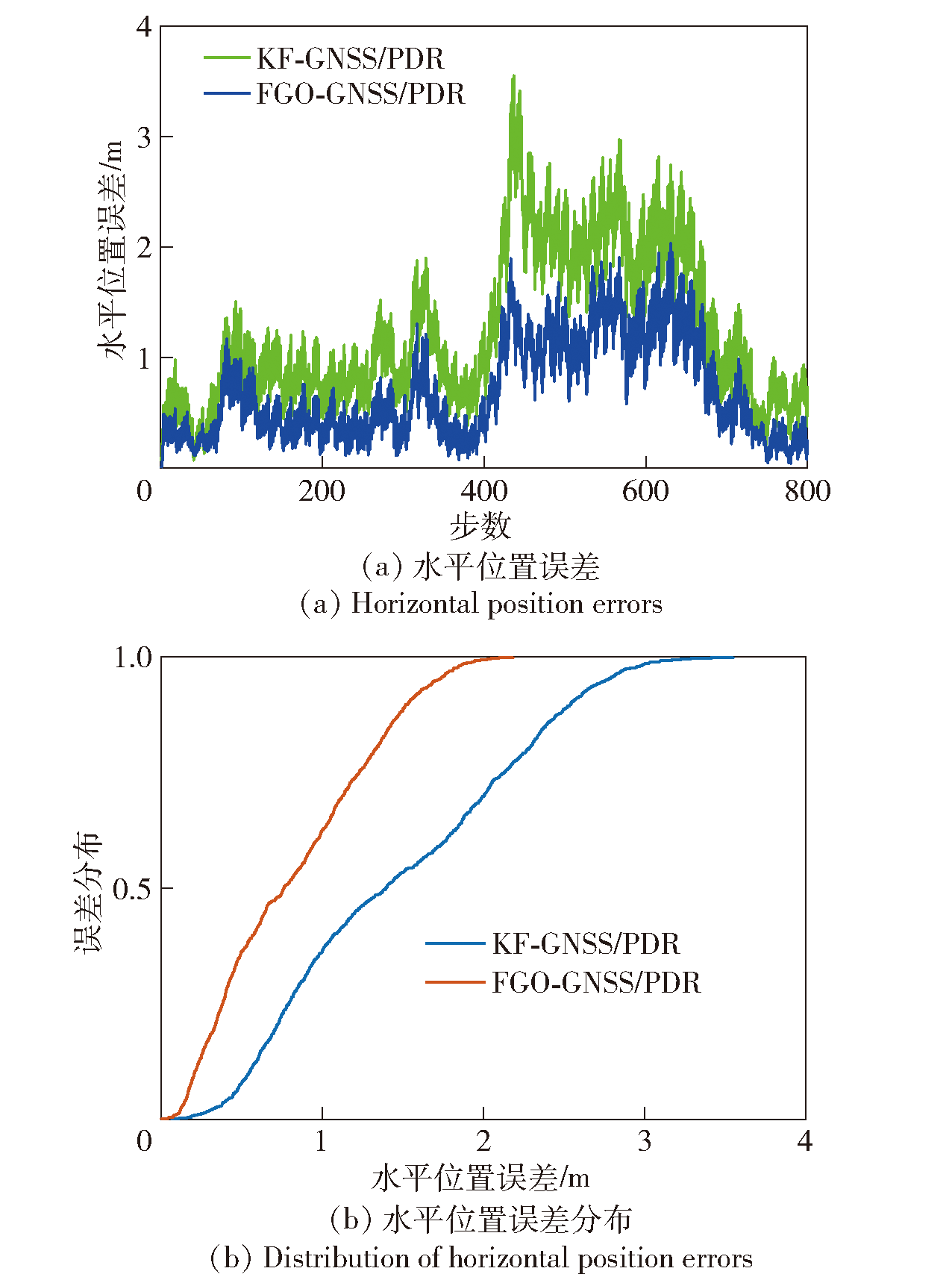
图8 手持实验1水平位置误差和分布
Fig.8 Hand-held experimental 1 horizontal position errors and distribution
| 方法 | 误差均值/m | 误差均方根/m |
|---|---|---|
| KF-GNSS/PDR | 1.48 | 0.77 |
| FGO-GNSS/PDR | 0.83 | 0.50 |
表1 手持实验1水平位置误差统计结果
Table 1 Hand-held experiment 1 statistical results of horizontal position errors
| 方法 | 误差均值/m | 误差均方根/m |
|---|---|---|
| KF-GNSS/PDR | 1.48 | 0.77 |
| FGO-GNSS/PDR | 0.83 | 0.50 |
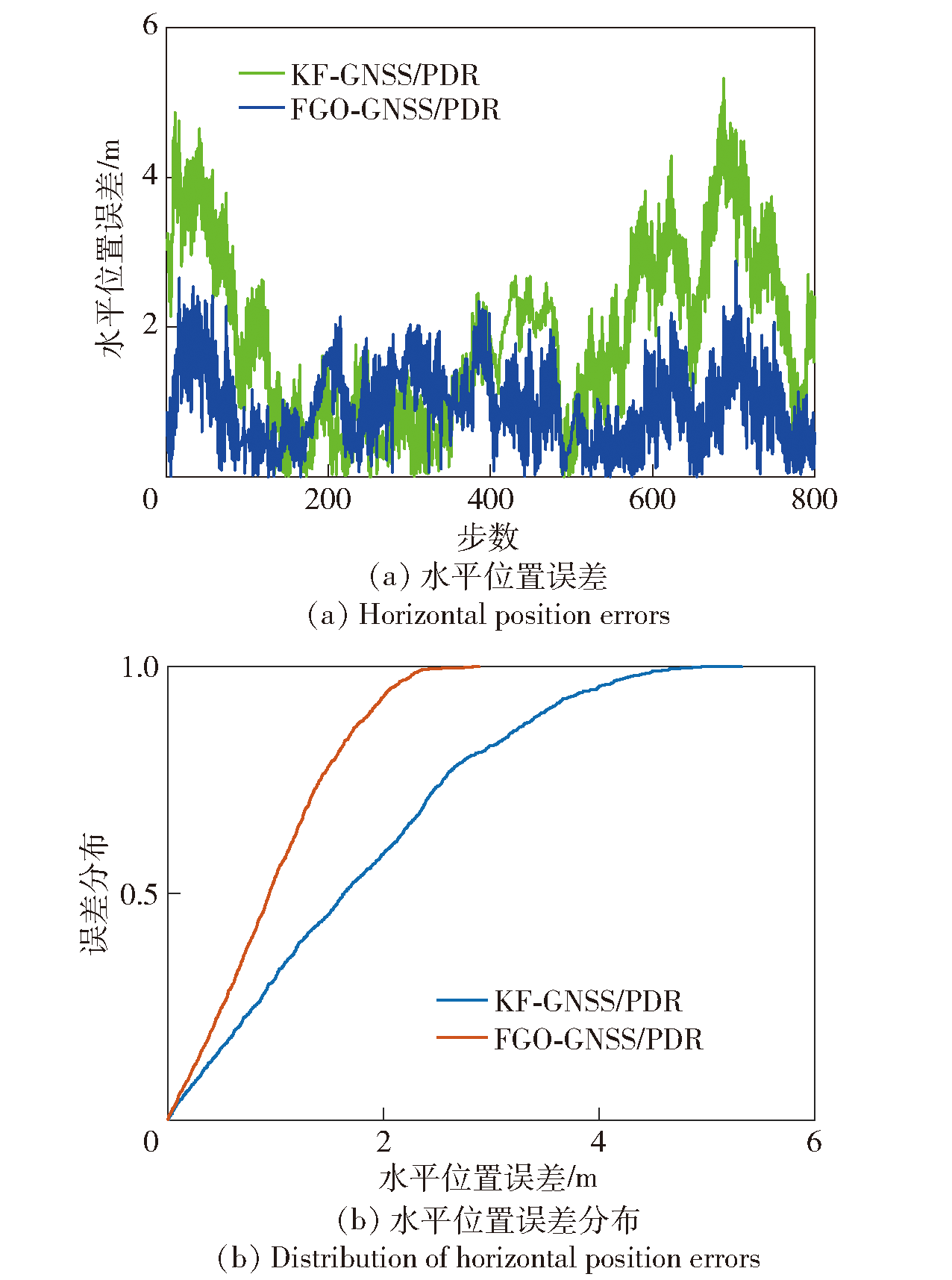
图9 手持实验2水平位置误差和分布
Fig.9 Hand-held experiment 2 horizontal position errors and distribution
| 方法 | 误差均值/m | 误差均方根/m |
|---|---|---|
| KF-GNSS/PDR | 1.78 | 1.18 |
| FGO-GNSS/PDR | 1.00 | 0.61 |
表2 手持实验2水平位置误差统计结果
Table 2 Hand-held experiment 2 statistical results of horizontal position errors
| 方法 | 误差均值/m | 误差均方根/m |
|---|---|---|
| KF-GNSS/PDR | 1.78 | 1.18 |
| FGO-GNSS/PDR | 1.00 | 0.61 |
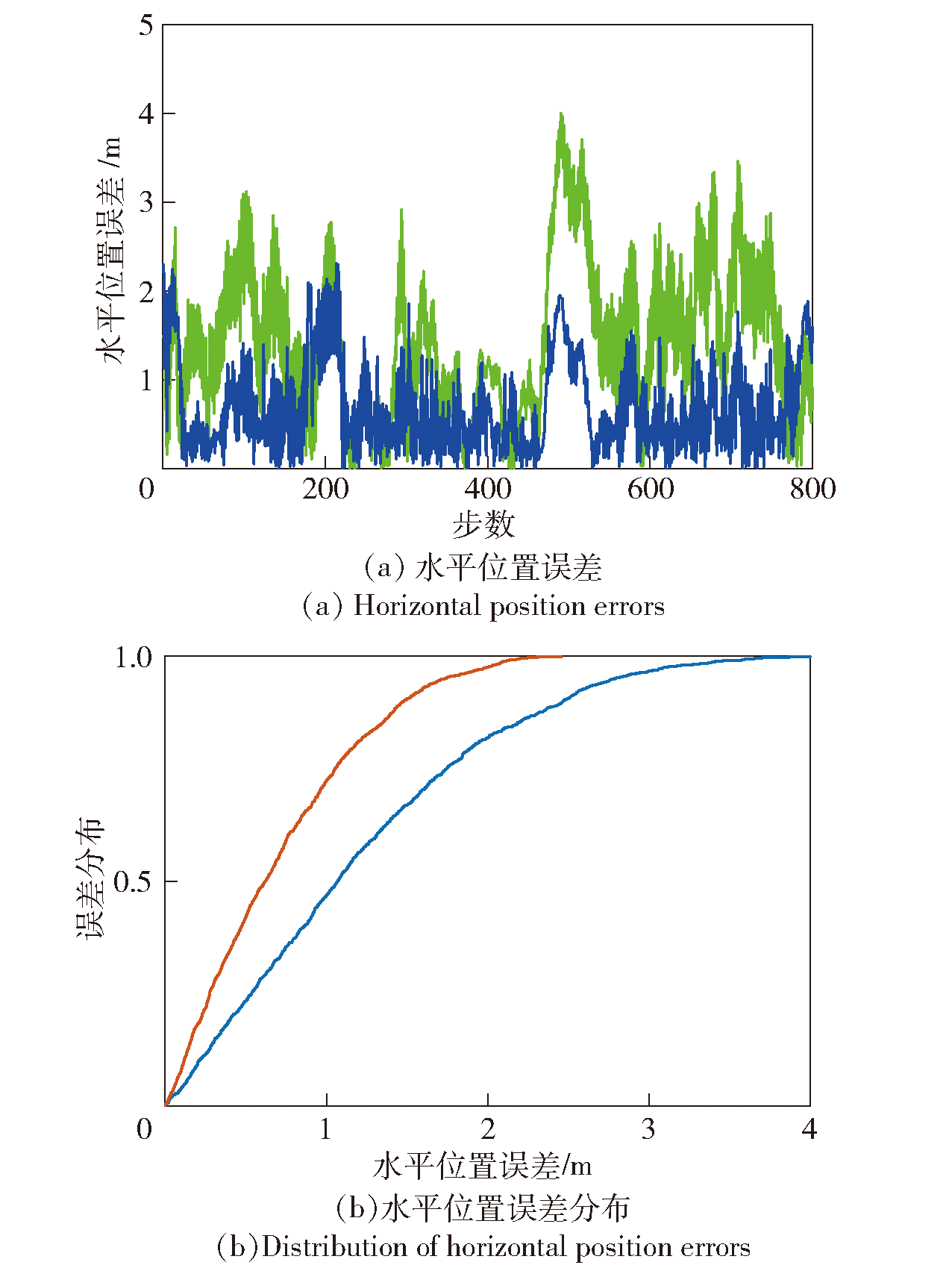
图10 背包实验1水平位置误差和分布
Fig.10 Knapsack experiment 1 horizontal position errors and distribution
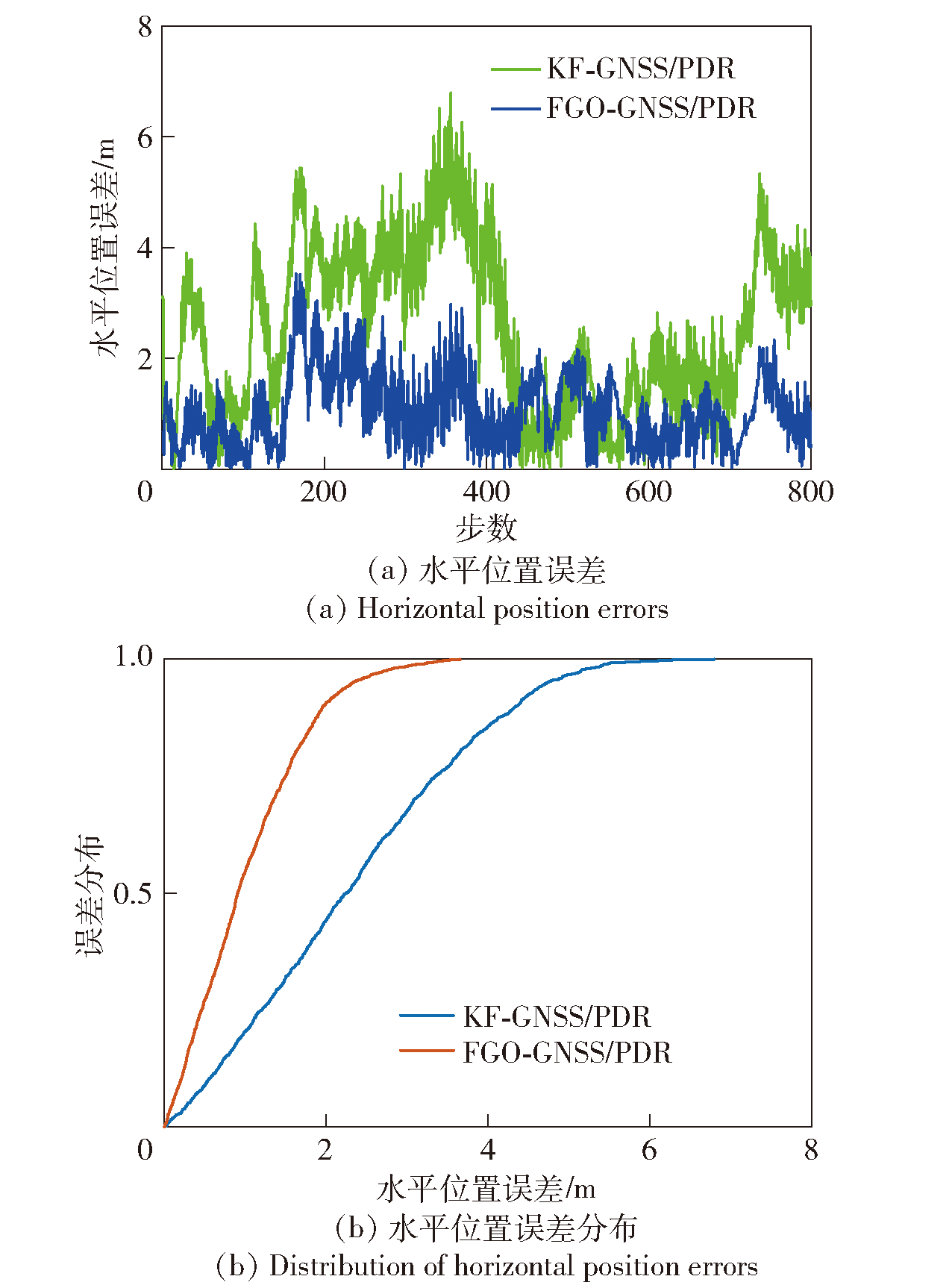
图11 背包实验2水平位置误差和分布
Fig.11 Knapsack experiment 2 horizontal position errors and distribution
| 方法 | 误差均值/m | 误差均方根/m |
|---|---|---|
| KF-GNSS/PDR | 1.21 | 0.84 |
| FGO-GNSS/PDR | 0.72 | 0.53 |
表3 背包实验1水平位置误差统计结果
Table 3 Knapsack experiment 1 statistical results of horizontal position errors
| 方法 | 误差均值/m | 误差均方根/m |
|---|---|---|
| KF-GNSS/PDR | 1.21 | 0.84 |
| FGO-GNSS/PDR | 0.72 | 0.53 |
| 方法 | 误差均值/m | 误差均方根/m |
|---|---|---|
| KF-GNSS/PDR | 2.34 | 1.39 |
| FGO-GNSS/PDR | 1.03 | 0.71 |
表4 背包实验2水平位置误差统计结果
Table 4 Knapsack experiment 2 statistical results of horizontal position errors
| 方法 | 误差均值/m | 误差均方根/m |
|---|---|---|
| KF-GNSS/PDR | 2.34 | 1.39 |
| FGO-GNSS/PDR | 1.03 | 0.71 |
| [1] |
郑学理, 付敬奇. 基于PDR和RSSI的室内定位算法研究[J]. 仪器仪表学报, 2015, 36(5): 1177-1185.
|
|
|
|
| [2] |
doi: 10.3390/s150924595 pmid: 26404314 |
| [3] |
沈世斌, 谢非, 赵静, 等. 基于相位控制的惯性与卫星超紧组合导航系统信号解调方法[J]. 兵工学报, 2020, 41(3): 495-506.
doi: 10.3969/j.issn.1000-1093.2020.03.010 |
|
doi: 10.3969/j.issn.1000-1093.2020.03.010 |
|
| [4] |
doi: 10.1109/JIOT.2021.3055794 URL |
| [5] |
doi: 10.1109/JIOT.2022.3150764 URL |
| [6] |
周瑞, 罗磊, 李志强, 等. 一种基于智能手机传感器的行人室内定位算法[J]. 计算机工程, 2016, 42(11): 22-26.
doi: 10.3969/j.issn.1000-3428.2016.11.004 |
|
doi: 10.3969/j.issn.1000-3428.2016.11.004 |
|
| [7] |
肖烜, 王清哲, 程远, 等. 捷联惯导系统/里程计高精度紧组合导航算法[J]. 兵工学报, 2012, 33(4): 395-400.
|
|
|
|
| [8] |
刘明雍, 胡俊伟, 李闻白. 一种基于改进无迹卡尔曼滤波的自主水下航行器组合导航方法研究[J]. 兵工学报, 2011, 32(2): 252-256.
|
|
|
|
| [9] |
徐昊玮, 廉保旺, 刘尚波. 基于滑动窗迭代最大后验估计的多源组合导航因子图融合算法[J]. 兵工学报, 2019, 40(4): 807-819.
doi: 10.3969/j.issn.1000-1093.2019.04.016 |
|
doi: 10.3969/j.issn.1000-1093.2019.04.016 |
|
| [10] |
doi: 10.1007/s10291-021-01184-1 |
| [11] |
吴有龙, 王晓鸣, 曹鹏. 抗差估计及Allan方差在车载组合导航系统中的应用研究[J]. 兵工学报, 2013, 34(7): 889-895.
doi: 10. 3969/ j. issn. 1000-1093. 2013. 07. 015 |
|
|
|
| [12] |
黄欣, 熊智, 许建新, 等. 基于零速/航向自观测/地磁匹配的行人导航算法研究[J]. 兵工学报, 2017, 38(10): 2031-2040.
doi: 10.3969/j.issn.1000-1093.2017.10.020 |
|
doi: 10.3969/j.issn.1000-1093.2017.10.020 |
|
| [13] |
doi: 10.3390/s18051391 URL |
| [14] |
doi: 10.1016/j.asr.2016.09.010 URL |
| [15] |
doi: 10.3390/rs11182174 URL |
| [16] |
|
| [17] |
|
| [18] |
doi: 10.1109/JSEN.7361 URL |
| [19] |
doi: 10.1007/s10291-022-01260-0 |
| [20] |
|
| [21] |
doi: 10.1109/COML.4234 URL |
| [1] | 夏琳琳, 张晶晶, 初妍, 张道畅, 宋梓维, 崔家硕, 刘瑞敏. 融合天空偏振光的视觉SLAM研究进展与展望[J]. 兵工学报, 2023, 44(6): 1588-1601. |
| [2] | 张福斌, 林家昀. 深度相机与微机电惯性测量单元松组合导航算法[J]. 兵工学报, 2021, 42(1): 159-166. |
| [3] | 沈世斌, 谢非, 赵静, 钱伟行, 康国华, 刘锡祥. 基于相位控制的惯性与卫星超紧组合导航系统信号解调方法[J]. 兵工学报, 2020, 41(3): 495-506. |
| [4] | 胡杰, 严勇杰, 王子卉. 基于速度约束与模糊自适应滤波的车载组合导航[J]. 兵工学报, 2020, 41(2): 231-238. |
| [5] | 张梦得, 李开龙, 胡柏青, 吕旭. 辅助信息源短时失效下的捷联惯性基组合导航算法[J]. 兵工学报, 2020, 41(10): 2008-2015. |
| [6] | 宋炜琳, 杨道宁. 基于星间链路的卫星导航系统星地业务信息传输规划调度方法研究[J]. 兵工学报, 2019, 40(8): 1627-1633. |
| [7] | 徐昊玮, 廉保旺, 刘尚波. 基于滑动窗迭代最大后验估计的多源组合导航因子图融合算法[J]. 兵工学报, 2019, 40(4): 807-819. |
| [8] | 李群生, 赵剡, 王进达. 一种适用于高动态强干扰环境的视觉辅助微机械捷联惯性导航系统/全球定位系统超紧组合导航系统[J]. 兵工学报, 2019, 40(11): 2241-2249. |
| [9] | 闵艳玲, 熊智, 邢丽, 刘建业, 殷德全. 基于对偶四元数的惯性/卫星/天文组合导航系统改进联邦滤波方法[J]. 兵工学报, 2018, 39(2): 315-324. |
| [10] | 肖泽龙, 王华, 周鹏, 韩璐霞, 王元恺, 李潇, 逯暄. 基于机会辐射源的弹载探测卫星优选方法[J]. 兵工学报, 2017, 38(8): 1555-1562. |
| [11] | 黄欣, 熊智, 许建新, 徐丽敏. 基于零速/航向自观测/地磁匹配的行人导航算法研究[J]. 兵工学报, 2017, 38(10): 2031-2040. |
| [12] | 张福斌, 马朋, 王智辉. 基于横坐标系的捷联惯性导航系统/多普勒速度仪极区组合导航算法[J]. 兵工学报, 2016, 37(7): 1229-1235. |
| [13] | 王丹青, 李萍, 朱永忠. 北斗导航/超短波通信双模三频一体化终端天线的研究与设计[J]. 兵工学报, 2016, 37(12): 2284-2292. |
| [14] | 潘加亮, 熊智, 王丽娜, 郁丰, 赵慧, 林爱军. 一种简化的发射系下SINS/GPS/CNS组合导航系统无迹卡尔曼滤波算法[J]. 兵工学报, 2015, 36(3): 484-491. |
| [15] | 吴有龙, 王晓鸣, 曹鹏. 抗差估计及 Allan 方差在车载组合导航系统中的应用研究[J]. 兵工学报, 2013, 34(7): 889-895. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4