
 E-mail Alert
E-mail Alert RSS
RSS
-
摘要:
硅基光电倍增管(SiPM)是由数百乃至数千单光子雪崩二极管(SPAD)组成的阵列,它具有增益高、易于集成到阵列以及抗干扰等优点,在激光雷达测距方面具有广泛的应用前景。本文分析了激光雷达测距中的信号和噪声模型,仿真计算了阳光下的SiPM模拟输出,通过高斯拟合得到相应的均值,并在SPAD接收光子受激发概率服从泊松分布的基础上,给出了背景光电子数在0.001个/ns~0.01个/ns,探测器死时间在5 ns~50 ns范围内受背景光影响的SiPM模拟输出计算公式,推导了目标探测概率表达式。在室外环境光下进行的激光测距探测概率实验结果与理论计算值相吻合。
 Abstract:
Abstract:Silicon photomultiplier (SiPM) is an array composed of hundreds or even thousands of single photon avalanche diode (SPAD). It has the advantages of high gain, easy integration into the array and anti-interference, and has a wide range of application prospects in LiDAR ranging. We analyzed the laser radar ranging signal and noise model, simulated the output of SiPM under sunlight, and obtained the corresponding mean value through Gaussian fitting. On the basis that the probability of being excited after SPAD received photons obeys the Poisson distribution, the calculation formula of SiPM analog output affected by background light when the background photoelectron is 0.001 /ns~0.01 /ns and the detector dead time is 5 ns~50 ns was given. Finally, we derived the expression of target detection probability. The experimental results of laser ranging detection probability under outdoor ambient light are consistent with theoretical calculations.
-
Key words:
- SiPM /
- background light /
- dead time /
- laser ranging /
- probability of detection
-

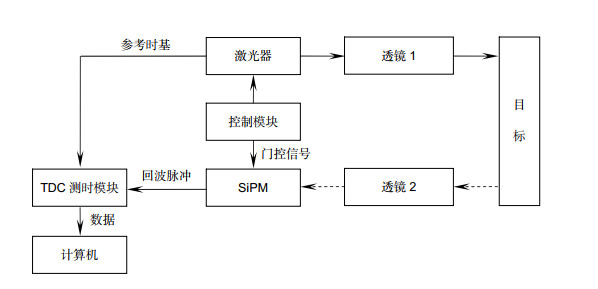
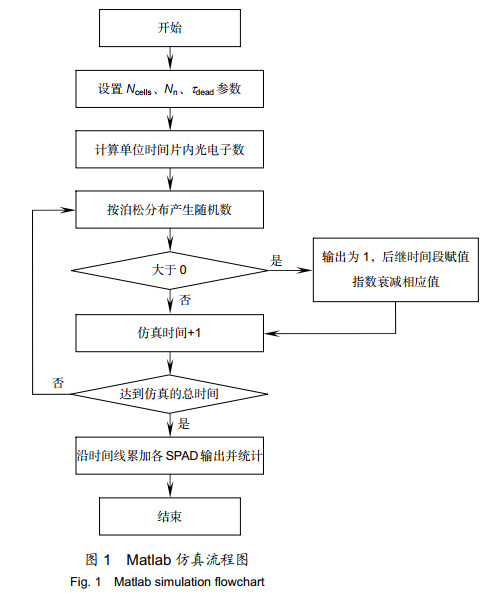
Overview: LiDAR ranging technology has the advantages of high accuracy, long range, low background interference, and the ability to obtain target distance information in a short time. In recent years, it has been more and more widely used in fields such as autonomous driving and depth imaging. Silicon photomultiplier (SiPM) is an array composed of hundreds or even thousands of single photon avalanche diode (SPADs). It has the advantages of high gain, easy integration into the array, and anti-interference, thus has a wide range of application prospects in LiDAR ranging. In many scenarios, LiDAR ranging will be interfered by background light. In the presence of background light, some SPAD units respond to background photons and remain "quenched" due to the dead time effect. However, other SPAD units are still in a "ready" state, so the detector can still respond to the laser echo signal. At present, part of the analysis of SiPM affected by ambient light is only a qualitative description, and some other part involves formula derivation, but the output amplitude of SPAD in SiPM is regarded as binary, which is different from the real situation of SiPM. For passively quenched SiPM devices, considering the actual situation that the simulation output amplitude of SPAD decays exponentially after excitation, the SiPM simulation output amplitude distribution affected by the background light under the dead time effect is simulated through programming firstly. Then the mean value of SiPM simulation output amplitude is calculated by Gaussian fitting. By analyzing the signal and noise models, the range of photoelectrons excited per nanosecond for each SPAD is estimated to be 0.001/ns~ 0.01/ns. On the basis that the probability of excitation of the SPAD received photons obeys the Poisson distribution, the calculation formula of SiPM analog output amplitude affected by background light is given when the background photoelectron is 0.001/ns~0.01/ns and the detector dead time is 5 ns~ 50 ns. Finally, the expression of target detection probability at different distances under the influence of ambient light is deduced. In addition, a radar ranging system is built by using KETEK's PM1125-WB-B0 series SiPM. The threshold was adjusted to set the corresponding false alarm probability within 400 ns of the gating time, and the time when the photons arrived at the detector was recorded through the TI's TDC7200EVM timing module. The experimental results of laser ranging detection probability under outdoor ambient light show that the experimental detection probability results are in good agreement with the theoretical calculation values under various experimental conditions, when the laser power is 1.5 W or 3 W, several parameters of false alarm rate change from 1% to 10%, and several parameters of light intensity change from 10 klux to 70 klux.
-

-
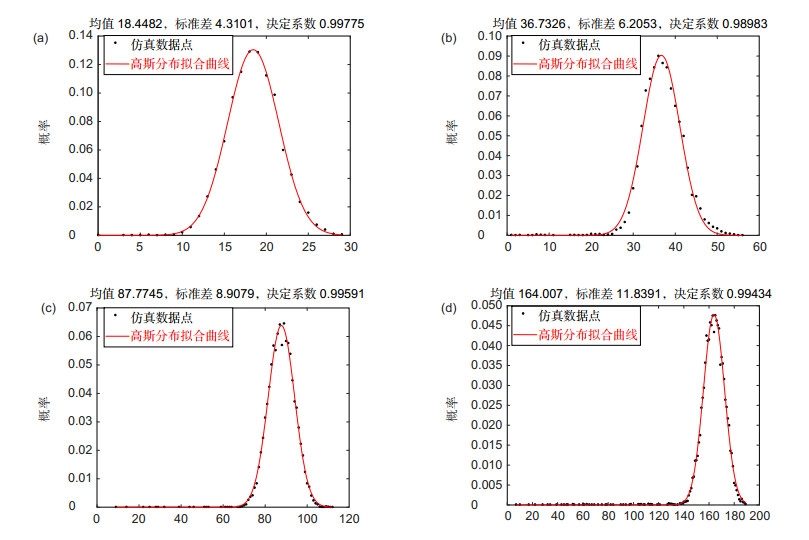
图 2 SPAD单元总数为1000时,SiPM模拟输出分布及高斯分布拟合。
Figure 2. SiPM simulation output distribution and Gaussian distribution fitting with unit total of SPAD for 1000.

图 3 SiPM中SPAD平均输出幅度与死时间内光电子数关系及拟合曲线
Figure 3. The relationship between the average output amplitude of SPAD in SiPM and the number of photoelectrons in the dead time and the fitting curve

图 5 不同背景光下系统理论测距探测概率
Figure 5. System theoretical ranging detection probability under different background light
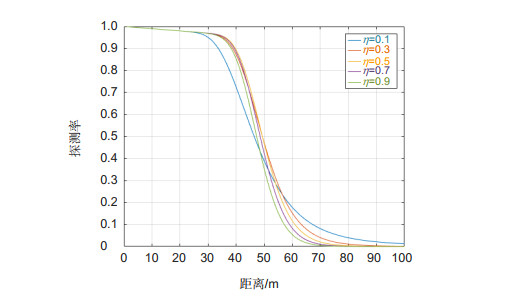
图 6 不同目标反射率下系统理论测距探测概率
Figure 6. System theoretical ranging detection probability under different target reflectivity

图 7 不同激光功率条件下实验结果与理论分析对比。
Figure 7. Comparison of experimental results and theoretical analysis under different laser power conditions.

图 8 不同背景光强度条件下实验结果与理论分析对比。
Figure 8. The experimental results are compared with theoretical analysis under different background light intensities.
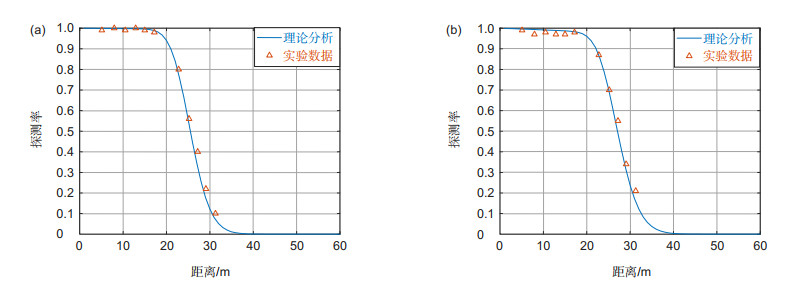
图 9 不同虚警概率条件下实验结果与理论分析对比。
Figure 9. The experimental results are compared with the theoretical analysis under different false alarm rates.
表 1 不同背景光电子数及死时间下平均每个SPAD输出幅度
Table 1. Average output amplitude of each SPAD under different background photoelectron numbers and dead time
Nn/(个/ns) τdead/ns Nn·τdead PSPAD 0.001 30 0.03 0.028 0.002 15 0.03 0.029 0.001 45 0.045 0.042 0.003 15 0.045 0.041 0.002 45 0.09 0.080 0.006 15 0.09 0.079 0.003 30 0.09 0.080 0.002 30 0.06 0.055 0.004 15 0.06 0.054  下载: 导出CSV
下载: 导出CSV
-
[1] Zhang Z J, Zhao Y, Zhang Y, et al. A real-time noise filtering strategy for photon counting 3D imaging lidar[J]. Opt Express, 2013, 21(8): 9247–9254. doi: 10.1364/OE.21.009247
[2] 刘博, 于洋, 姜朔. 激光雷达探测及三维成像研究进展[J]. 光电工程, 2019, 46(7): 190167. doi: 10.12086/oee.2019.190167
Liu B, Yu Y, Jiang S. Review of advances in LiDAR detection and 3D imaging[J]. Opto-Electron Eng, 2019, 46(7): 190167. doi: 10.12086/oee.2019.190167
[3] 陈晓冬, 张佳琛, 庞伟凇, 等. 智能驾驶车载激光雷达关键技术与应用算法[J]. 光电工程, 2019, 46(7): 190182. doi: 10.12086/oee.2019.190182
Chen X D, Zhang J C, Pang W S, et al. Key technology and application algorithm of intelligent driving vehicle LiDAR[J]. Opto-Electron Eng, 2019, 46(7): 190182. doi: 10.12086/oee.2019.190182
[4] 陈敬业, 时尧成. 固态激光雷达研究进展[J]. 光电工程, 2019, 46(7): 190218. doi: 10.12086/oee.2019.190218
Chen J Y, Shi Y C. Research progress in solid-state LiDAR[J]. Opto-Electron Eng, 2019, 46(7): 190218. doi: 10.12086/oee.2019.190218
[5] 汪佳佳. 基于SiPM的高精度激光测距技术研究[D]. 上海: 中国科学院大学(中国科学院上海技术物理研究所), 2018.
Wang J J. Research on high precision laser range finder based on SiPM[D]. Shanghai: University of Chinese Academy of Sciences (Shanghai Institute of Technical Physics of the Chinese Academy of Sciences), 2018.
[6] 侯利冰, 黄庚华, 况耀武, 等. 光子计数激光测距技术研究[J]. 科学技术与工程, 2013, 13(18): 5186–5190. doi: 10.3969/j.issn.1671-1815.2013.18.020
Hou L B, Huang G H, Kuang Y W, et al. Research of photon counting laser ranging technology[J]. Sci Technol Eng, 2013, 13(18): 5186–5190. doi: 10.3969/j.issn.1671-1815.2013.18.020
[7] Vinogradov S L. Evaluation of performance of silicon photomultipliers in lidar applications[J]. Proc SPIE, 2017, 10229: 102290L. http://proceedings.spiedigitallibrary.org/proceeding.aspx?articleid=2628269
[8] Son K T, Lee C C. Multiple-target laser rangefinding receiver using a silicon photomultiplier array[J]. IEEE Trans Instrum Meas, 2010, 59(11): 3005–3011. doi: 10.1109/TIM.2010.2047127
[9] 张国青, 刘丽娜, 朱长军. 采用多像素光子计数器的探测率与虚警率[J]. 红外与激光工程, 2013, 42(7): 1819–1824. doi: 10.3969/j.issn.1007-2276.2013.07.031
Zhang G Q, Liu L N, Zhu C J. Detection and false-alarm probabilities based on multi-pixel photon counter[J]. Infrared Laser Eng, 2013, 42(7): 1819–1824. doi: 10.3969/j.issn.1007-2276.2013.07.031
[10] Agishev R, Comerón A, Bach J, et al. Lidar with SiPM: some capabilities and limitations in real environment[J]. Opt Laser Technol, 2013, 49: 86–90. doi: 10.1016/j.optlastec.2012.12.024
[11] Mizuno T, Ikeda H, Nagano T, et al. Three-dimensional Image Sensor with MPPC for Flash LIDAR[J]. Trans Japan Soc Aeronaut Space Sci, 2020, 63(2): 42–49. doi: 10.2322/tjsass.63.42
[12] 刘鸿彬, 李铭, 舒嵘, 等. 少光子灵敏度精密激光测距方法及验证[J]. 红外与激光工程, 2019, 48(1): 0106001. https://www.cnki.com.cn/Article/CJFDTOTAL-HWYJ201901015.htm
Liu H B, Li M, Shu R, et al. Estimation and verification of high-accuracy laser ranging on several photons[J]. Infrared Laser Eng, 2019, 48(1): 0106001. https://www.cnki.com.cn/Article/CJFDTOTAL-HWYJ201901015.htm
[13] Acerbi F, Gundacker S. Understanding and simulating SiPMs[J]. Nucl Instrum Methods Phys Res Sect A: Accel, Spectrom, Detect Assoc Equip, 2019, 926: 16–35. doi: 10.1016/j.nima.2018.11.118
[14] Grodzicka M, Moszyński M, Szczęśniak T, et al. Effective dead time of APD cells of SiPM[C]//2011 IEEE Nuclear Science Symposium Conference Record. 2011: 553–562.
[15] 司马博羽, 陈钱, 何伟基. 单光子雪崩二极管的死时间效应分析[J]. 光学技术, 2012, 38(5): 515–519. https://www.cnki.com.cn/Article/CJFDTOTAL-GXJS201205002.htm
Sima B Y, Chen Q, He W J. Analysis on the deadtime effect of an SPAD[J]. Opt Tech, 2012, 38(5): 515–519. https://www.cnki.com.cn/Article/CJFDTOTAL-GXJS201205002.htm
-
 点击扫一扫
点击扫一扫
图(9)
表(1)
计量
- 文章访问数: 4884
- PDF下载数: 3087
- 施引文献: 0


