


《计算机应用》唯一官方网站 ›› 2023, Vol. 43 ›› Issue (12): 3840-3847.DOI: 10.11772/j.issn.1001-9081.2022121847
收稿日期:2022-12-13
修回日期:2023-03-03
接受日期:2023-03-06
发布日期:2023-03-27
出版日期:2023-12-10
通讯作者:
符强
作者简介:黄霖(1997—),男,江西赣州人,硕士研究生,主要研究方向:群智能算法、机器学习基金资助:
Lin HUANG1, Qiang FU1,2( ), Nan TONG2
), Nan TONG2
Received:2022-12-13
Revised:2023-03-03
Accepted:2023-03-06
Online:2023-03-27
Published:2023-12-10
Contact:
Qiang FU
About author:HUANG Lin, born in 1997, M.S. candidate. His research interests include swarm intelligence algorithm, machine learning.Supported by:摘要:
针对启发式算法在机器人路径规划过程中存在路径长度不稳定和易陷入局部极小点的问题,提出一种基于自适应调整哈里斯鹰优化(AAHHO)算法。首先,利用收敛因子调整策略,调节全局搜索阶段和局部搜索阶段的平衡,同时利用自然常数为底数,提高搜索效率和收敛精度;其次,在全局搜索阶段,采用精英合作引导搜索策略,通过3个精英哈里斯鹰合作引导其他个体更新位置以提高搜索性能,通过3个最优位置加强种群间的信息交流;最后,通过模拟种内竞争策略增强哈里斯鹰跳出局部最优的能力。函数测试和机器人路径规划对比实验结果表明,所提算法无论是函数测试还是机器人路径规划都优于IHHO(Improve Harris Hawk Optimization)和CHHO(Chaotic Harris Hawk Optimization)等对比算法,对于求解机器人的路径规划具有较好的有效性、可行性和稳定性。
中图分类号:
黄霖, 符强, 童楠. 基于自适应调整哈里斯鹰优化算法求解机器人路径规划问题[J]. 计算机应用, 2023, 43(12): 3840-3847.
Lin HUANG, Qiang FU, Nan TONG. Solving robot path planning problem by adaptively adjusted Harris hawk optimization algorithm[J]. Journal of Computer Applications, 2023, 43(12): 3840-3847.
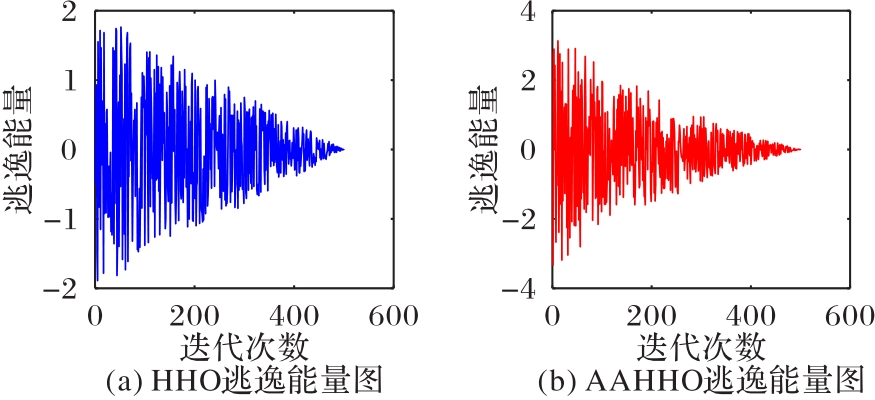
图1 逃逸能量对比
Fig. 1 Escape energy contrast
| 函数类型 | 函数公式 | 维度 | 取值范围 | 最优值 |
|---|---|---|---|---|
| 单峰函数 | 30 | [-100,100] | 0 | |
| 30 | [-10,10] | 0 | ||
| 30 | [-100,100] | 0 | ||
| 30 | [-30,30] | 0 | ||
| 30 | [-100,100] | 0 | ||
| 30 | [-128,128] | 0 | ||
| 多峰函数 | 30 | [-500,500] | -418.982 9×n | |
| 30 | [-32,32] | 0 | ||
| 30 | [-600,600] | 0 | ||
| 30 | [-50,50] | 0 | ||
| 30 | [-50,50] | 0 | ||
| 2 | [-65,65] | 1 | ||
| 4 | [-5,5] | 0.000 3 | ||
| 2 | [-5,5] | -1.031 6 | ||
| 4 | [0,10] | -10.536 3 |
表1 测试函数
Tab. 1 Test functions
| 函数类型 | 函数公式 | 维度 | 取值范围 | 最优值 |
|---|---|---|---|---|
| 单峰函数 | 30 | [-100,100] | 0 | |
| 30 | [-10,10] | 0 | ||
| 30 | [-100,100] | 0 | ||
| 30 | [-30,30] | 0 | ||
| 30 | [-100,100] | 0 | ||
| 30 | [-128,128] | 0 | ||
| 多峰函数 | 30 | [-500,500] | -418.982 9×n | |
| 30 | [-32,32] | 0 | ||
| 30 | [-600,600] | 0 | ||
| 30 | [-50,50] | 0 | ||
| 30 | [-50,50] | 0 | ||
| 2 | [-65,65] | 1 | ||
| 4 | [-5,5] | 0.000 3 | ||
| 2 | [-5,5] | -1.031 6 | ||
| 4 | [0,10] | -10.536 3 |
| 测试函数 | 指标 | HSCA | TGWO | HHO | IHHO | CHHO | AAHHO |
|---|---|---|---|---|---|---|---|
| AVG | 8.84E-07 | 2.56E-299 | 2.44E-95 | 4.76E-99 | 9.52E-128 | 0 | |
| STD | 4.60E-06 | 9.89E-299 | 9.05E-95 | 2.16E-98 | 4.59E-127 | 0 | |
| AVG | 1.78E-06 | 1.68E-164 | 6.77E-49 | 9.75E-48 | 8.32E-68 | 0 | |
| STD | 4.76E-06 | 2.69E-164 | 1.41E-49 | 2.05E-48 | 1.75E-68 | 0 | |
| AVG | 4.13E-07 | 4.16E-150 | 3.67E-49 | 6.10E-48 | 1.70E-63 | 3.30E-175 | |
| STD | 1.06E-06 | 2.26E-150 | 1.17E-49 | 2.14E-47 | 9.15E-63 | 4.31E-184 | |
| AVG | 8.75E+00 | 2.83E+01 | 1.02E-02 | 1.35E+00 | 1.22E-02 | 8.01E-04 | |
| STD | 9.27E-02 | 3.34E-01 | 1.24E-02 | 7.42E-01 | 1.77E-02 | 1.27E-03 | |
| AVG | 6.07E-04 | 5.40E+00 | 3.12E-04 | 1.04E-02 | 3.09E-04 | 2.84E-05 | |
| STD | 2.95E-04 | 1.87E-01 | 3.14E-04 | 5.81E-03 | 2.27E-04 | 2.92E-05 | |
| AVG | 2.64E-04 | 8.98E-05 | 1.22E-04 | 3.86E-04 | 9.64E-05 | 4.75E-05 | |
| STD | 6.32E-04 | 8.57E-05 | 1.41E-04 | 4.70E-04 | 7.15E-05 | 3.33E-05 | |
| AVG | -2.54E+03 | -2.36E+03 | -1.24E+04 | -1.12E+04 | -8.57E+03 | -1.26E+04 | |
| STD | 4.23E+02 | 2.96E+02 | 8.52E+02 | 1.75E+03 | 2.14E+03 | 1.41E-02 | |
| AVG | 1.07E-05 | 8.88E-16 | 8.88E-16 | 8.88E-16 | 8.88E-16 | 8.88E-16 | |
| STD | 4.45E-05 | 0 | 0 | 0 | 0 | 0 | |
| AVG | 4.70E-02 | 0 | 0 | 0 | 0 | 0 | |
| STD | 1.57E-01 | 0 | 0 | 0 | 0 | 0 | |
| AVG | 1.31E-04 | 7.47E-01 | 1.14E-05 | 4.98E-04 | 7.03E-05 | 2.11E-06 | |
| STD | 1.55E-04 | 5.74E-02 | 2.10E-05 | 3.60E-04 | 8.73E-05 | 2.41E-06 | |
| AVG | 1.23E-02 | 2.65E+00 | 1.34E-04 | 7.20E-03 | 6.24E-04 | 2.14E-05 | |
| STD | 6.33E-02 | 5.79E-02 | 1.73E-04 | 7.98E-03 | 1.58E-03 | 2.11E-05 | |
| AVG | 1.88E+00 | 3.85E+00 | 1.22E+00 | 2.74E+00 | 2.43E+00 | 9.98E-01 | |
| STD | 1.05E+00 | 2.59E+00 | 4.38E-01 | 3.42E+00 | 1.65E+00 | 2.70E-04 | |
| AVG | 4.56E-04 | 5.54E-04 | 3.57E-04 | 3.97E-04 | 4.99E-04 | 3.38E-04 | |
| STD | 3.92E-04 | 1.29E-04 | 4.94E-05 | 1.23E-04 | 2.95E-04 | 3.70E-05 | |
| AVG | -1.0316 | -1.0316 | -1.0316 | -1.0316 | -1.0316 | -1.0316 | |
| STD | 0 | 0 | 0 | 0 | 0 | 0 | |
| STD | 0 | 4.97E-04 | 0 | 0 | 0 | 0 | |
| AVG | -7.17E+00 | -3.88E+00 | -5.21E+00 | -7.74E+00 | -5.30E+00 | -1.05E+01 | |
| STD | 2.49E+00 | 6.11E-01 | 1.13E+00 | 2.75E+00 | 1.96E+00 | 1.39E-02 |
表2 6种算法在固定迭代次数下寻优结果比较
Tab. 2 Comparison of optimization results of six algorithms under fixed number of iterations
| 测试函数 | 指标 | HSCA | TGWO | HHO | IHHO | CHHO | AAHHO |
|---|---|---|---|---|---|---|---|
| AVG | 8.84E-07 | 2.56E-299 | 2.44E-95 | 4.76E-99 | 9.52E-128 | 0 | |
| STD | 4.60E-06 | 9.89E-299 | 9.05E-95 | 2.16E-98 | 4.59E-127 | 0 | |
| AVG | 1.78E-06 | 1.68E-164 | 6.77E-49 | 9.75E-48 | 8.32E-68 | 0 | |
| STD | 4.76E-06 | 2.69E-164 | 1.41E-49 | 2.05E-48 | 1.75E-68 | 0 | |
| AVG | 4.13E-07 | 4.16E-150 | 3.67E-49 | 6.10E-48 | 1.70E-63 | 3.30E-175 | |
| STD | 1.06E-06 | 2.26E-150 | 1.17E-49 | 2.14E-47 | 9.15E-63 | 4.31E-184 | |
| AVG | 8.75E+00 | 2.83E+01 | 1.02E-02 | 1.35E+00 | 1.22E-02 | 8.01E-04 | |
| STD | 9.27E-02 | 3.34E-01 | 1.24E-02 | 7.42E-01 | 1.77E-02 | 1.27E-03 | |
| AVG | 6.07E-04 | 5.40E+00 | 3.12E-04 | 1.04E-02 | 3.09E-04 | 2.84E-05 | |
| STD | 2.95E-04 | 1.87E-01 | 3.14E-04 | 5.81E-03 | 2.27E-04 | 2.92E-05 | |
| AVG | 2.64E-04 | 8.98E-05 | 1.22E-04 | 3.86E-04 | 9.64E-05 | 4.75E-05 | |
| STD | 6.32E-04 | 8.57E-05 | 1.41E-04 | 4.70E-04 | 7.15E-05 | 3.33E-05 | |
| AVG | -2.54E+03 | -2.36E+03 | -1.24E+04 | -1.12E+04 | -8.57E+03 | -1.26E+04 | |
| STD | 4.23E+02 | 2.96E+02 | 8.52E+02 | 1.75E+03 | 2.14E+03 | 1.41E-02 | |
| AVG | 1.07E-05 | 8.88E-16 | 8.88E-16 | 8.88E-16 | 8.88E-16 | 8.88E-16 | |
| STD | 4.45E-05 | 0 | 0 | 0 | 0 | 0 | |
| AVG | 4.70E-02 | 0 | 0 | 0 | 0 | 0 | |
| STD | 1.57E-01 | 0 | 0 | 0 | 0 | 0 | |
| AVG | 1.31E-04 | 7.47E-01 | 1.14E-05 | 4.98E-04 | 7.03E-05 | 2.11E-06 | |
| STD | 1.55E-04 | 5.74E-02 | 2.10E-05 | 3.60E-04 | 8.73E-05 | 2.41E-06 | |
| AVG | 1.23E-02 | 2.65E+00 | 1.34E-04 | 7.20E-03 | 6.24E-04 | 2.14E-05 | |
| STD | 6.33E-02 | 5.79E-02 | 1.73E-04 | 7.98E-03 | 1.58E-03 | 2.11E-05 | |
| AVG | 1.88E+00 | 3.85E+00 | 1.22E+00 | 2.74E+00 | 2.43E+00 | 9.98E-01 | |
| STD | 1.05E+00 | 2.59E+00 | 4.38E-01 | 3.42E+00 | 1.65E+00 | 2.70E-04 | |
| AVG | 4.56E-04 | 5.54E-04 | 3.57E-04 | 3.97E-04 | 4.99E-04 | 3.38E-04 | |
| STD | 3.92E-04 | 1.29E-04 | 4.94E-05 | 1.23E-04 | 2.95E-04 | 3.70E-05 | |
| AVG | -1.0316 | -1.0316 | -1.0316 | -1.0316 | -1.0316 | -1.0316 | |
| STD | 0 | 0 | 0 | 0 | 0 | 0 | |
| STD | 0 | 4.97E-04 | 0 | 0 | 0 | 0 | |
| AVG | -7.17E+00 | -3.88E+00 | -5.21E+00 | -7.74E+00 | -5.30E+00 | -1.05E+01 | |
| STD | 2.49E+00 | 6.11E-01 | 1.13E+00 | 2.75E+00 | 1.96E+00 | 1.39E-02 |

图2 15个基准函数收敛曲线
Fig. 2 Convergence curves of 15 benchmark functions

图3 不同场景的路径规划和收敛曲线对比
Fig.3 Comparison of path plannings and convergence curves for different scenes
| 场景 | 算法 | 最优值 | 最差值 | 平均值 | 方差 |
|---|---|---|---|---|---|
场景 一 | HSCA | 5.727 2 | 7.281 9 | 6.170 7 | 0.395 6 |
| TGWO | 5.704 6 | 5.916 8 | 5.809 4 | 0.005 7 | |
| HHO | 5.671 6 | 6.531 9 | 5.849 0 | 0.101 5 | |
| IHHO | 5.669 6 | 6.428 3 | 5.817 7 | 0.069 1 | |
| CHHO | 5.669 6 | 6.368 8 | 5.760 0 | 0.045 1 | |
| AAHHO | 5.671 0 | 5.678 2 | 5.673 2 | 5.27E-06 | |
场景 二 | HSCA | 9.142 1 | 10.939 9 | 9.869 7 | 0.783 5 |
| TGWO | 8.868 9 | 11.152 3 | 9.560 8 | 1.139 4 | |
| HHO | 8.721 0 | 10.933 0 | 9.869 6 | 1.501 6 | |
| IHHO | 8.727 5 | 9.273 6 | 8.967 0 | 0.062 6 | |
| CHHO | 8.630 2 | 10.779 3 | 9.429 8 | 0.884 0 | |
| AAHHO | 8.639 7 | 8.872 9 | 8.756 5 | 0.010 5 |
表3 6种算法在不同场景下的路径比较
Tab.3 Path comparison of six algorithms in different scenarios
| 场景 | 算法 | 最优值 | 最差值 | 平均值 | 方差 |
|---|---|---|---|---|---|
场景 一 | HSCA | 5.727 2 | 7.281 9 | 6.170 7 | 0.395 6 |
| TGWO | 5.704 6 | 5.916 8 | 5.809 4 | 0.005 7 | |
| HHO | 5.671 6 | 6.531 9 | 5.849 0 | 0.101 5 | |
| IHHO | 5.669 6 | 6.428 3 | 5.817 7 | 0.069 1 | |
| CHHO | 5.669 6 | 6.368 8 | 5.760 0 | 0.045 1 | |
| AAHHO | 5.671 0 | 5.678 2 | 5.673 2 | 5.27E-06 | |
场景 二 | HSCA | 9.142 1 | 10.939 9 | 9.869 7 | 0.783 5 |
| TGWO | 8.868 9 | 11.152 3 | 9.560 8 | 1.139 4 | |
| HHO | 8.721 0 | 10.933 0 | 9.869 6 | 1.501 6 | |
| IHHO | 8.727 5 | 9.273 6 | 8.967 0 | 0.062 6 | |
| CHHO | 8.630 2 | 10.779 3 | 9.429 8 | 0.884 0 | |
| AAHHO | 8.639 7 | 8.872 9 | 8.756 5 | 0.010 5 |
| 1 | DENG X, LI R, ZHAO L, et al. Multi-obstacle path planning and optimization for mobile robot[J]. Expert Systems with Applications, 2021, 183: 115445. 10.1016/j.eswa.2021.115445 |
| 2 | 徐小强,王明勇,冒燕.基于改进人工势场法的移动机器人路径规划 [J].计算机应用,2020,40(12):3508-3512. 10.11772/j.issn.1001-9081.2020050640 |
| XU X Q, WANG M Y, MAO Y.Path planning of mobile robot based on improved artificial potential field method [J]. Journal of Computer Applications, 2020,40 (12): 3508-3512. 10.11772/j.issn.1001-9081.2020050640 | |
| 3 | HUANG H, LI Y, BAI Q. An improved A star algorithm for wheeled robots path planning with jump points search and pruning method [J]. Complex Engineering Systems, 2022, 2(3): 11. 10.20517/ces.2022.12 |
| 4 | 李伟,金世俊.基于人工势场法和启发式采样的最优路径收敛方法[J].计算机应用,2021,41(10):2912-2918. 10.11772/j.issn.1001-9081.2020122021 |
| LI W, JIN S J. Optimal path convergence method based on artificial potential field method and informed sampling [J]. Journal of Computer Applications, 2021,41(10): 2912-2918. 10.11772/j.issn.1001-9081.2020122021 | |
| 5 | 刘志强,何丽,袁亮,等.采用改进灰狼算法的移动机器人路径规划[J].西安交通大学学报,2022,56(10):49-60. 10.7652/xjtuxb202210005 |
| LIU Z Q, HE L, YUAN L, et al. Path planning of mobile robot based on TGWO algorithm [J]. Journal of Xi’an Jiaotong University, 2022,56(10): 49-60. 10.7652/xjtuxb202210005 | |
| 6 | WANG J, LIU J, CHEN W, et al. Robot path planning via neural-network-driven prediction[J]. IEEE Transactions on Artificial Intelligence, 2021, 3(3): 451-460. 10.1109/tai.2021.3119890 |
| 7 | WU P, CAO Y, HE Y, et al. Vision-based robot path planning with deep learning[C]// Proceedings of the 11th International Conference on Computer Vision Systems. Cham: Springer, 2017: 101-111. 10.1007/978-3-319-68345-4_9 |
| 8 | ABDI A, ADHIKARI D, PARK J H. A novel hybrid path planning method based on Q-learning and neural network for robot arm [J]. Applied Sciences, 2021, 11(15): 6770. 10.3390/app11156770 |
| 9 | 马莹莹,杜暖男.基于改进正余弦算法的机器人路径规划[J].重庆交通大学学报(自然科学版),2021,40(9):17-23. 10.3969/j.issn.1674-0696.2021.09.03 |
| MA Y Y, DU N N. Robot path planning based on the improved sine cosine algorithm [J]. Journal of Chongqing Jiaotong University (Natural Sciences), 2021,40 (9): 17-23. 10.3969/j.issn.1674-0696.2021.09.03 | |
| 10 | 刘景森,吉宏远,李煜.基于改进蝙蝠算法和三次样条插值的机器人路径规划[J].自动化学报,2021,47(7):1710-1719. |
| LIU J S, JI H Y, LI Y. Robotic path planning based on improved bat algorithm and cubic spline interpolation [J]. Acta Automatica Sinica, 2021,47 (7): 1710-1719. | |
| 11 | HEIDARI A A, MIRJALILI S, FARIS H, et al. Harris hawks optimization: algorithm and applications [J]. Future Generation Computer Systems, 2019, 97: 849-872. 10.1016/j.future.2019.02.028 |
| 12 | LIU C. An improved Harris hawks optimizer for job-shop scheduling problem[J]. The Journal of Supercomputing, 2021, 77: 14090-14129. 10.1007/s11227-021-03834-0 |
| 13 | JIA H, LANG C, OLIVA D, et al. Dynamic Harris hawks optimization with mutation mechanism for satellite image segmentation [J]. Remote Sensing, 2019, 11(12): 1421. 10.3390/rs11121421 |
| 14 | GOLILARZ N A, MIRMOZAFFARI M, GASHTEROODKHANI T A, et al. Optimized wavelet-based satellite image de-noising with multi-population differential evolution-assisted Harris hawks optimization algorithm[J]. IEEE Access, 2020, 8: 133076-133085. 10.1109/access.2020.3010127 |
| 15 | JIA H, PENG X, KANG L, et al. Pulse coupled neural network based on Harris hawks optimization algorithm for image segmentation [J]. Multimedia Tools and Applications, 2020, 79: 28369-28392. 10.1007/s11042-020-09228-3 |
| 16 | BANDYOPADHYAY R, KUNDU R, OLIVA D, et al. Segmentation of brain MRI using an altruistic Harris hawks’ optimization algorithm[J]. Knowledge-Based Systems, 2021, 232: 107468. 10.1016/j.knosys.2021.107468 |
| 17 | CAMPBELL M O N. The Great Eagles: Their Evolution, Ecology and Conservation [M]. Boca Raton: CRC Press, 2022:347-363. 10.1201/b21921-8 |
| 18 | TURABIEH H, AZWARI S A, ROKAYA M, et al. Enhanced Harris hawks optimization as a feature selection for the prediction of student performance [J]. Computing, 2021, 103: 1417-1438. 10.1007/s00607-020-00894-7 |
| 19 | ABDEL-BASSET M, DING W, EL-SHAHAT D. A hybrid Harris hawks optimization algorithm with simulated annealing for feature selection [J]. Artificial Intelligence Review, 2021, 54: 593-637. 10.1007/s10462-020-09860-3 |
| 20 | SIHWAIL R, OMAR K, ARIFFIN K A Z, et al. Improved Harris hawks optimization using elite opposition-based learning and novel search mechanism for feature selection [J]. IEEE Access, 2020, 8: 121127-121145. 10.1109/access.2020.3006473 |
| 21 | AL-SAFI H, MUNILLA J, RAHEBI J. Patient privacy in smart cities by blockchain technology and feature selection with Harris Hawks Optimization (HHO) algorithm and machine learning [J]. Multimedia Tools and Applications, 2022, 81: 8719-8743. 10.1007/s11042-022-12164-z |
| 22 | ZHANG Y, LIU R, WANG X, et al. Boosted binary Harris hawks optimizer and feature selection [J]. Engineering with Computers, 2021, 37: 3741-3770. 10.1007/s00366-020-01028-5 |
| 23 | CHAKRABORTY A, KAR A K. Swarm intelligence: a review of algorithms [M]// Nature-Inspired Computing and Optimization 10. Cham: Springer, 2017: 475-494. 10.1007/978-3-319-50920-4_19 |
| 24 | BARTHELEMY P, BERTOLOTTI J, WIERSMA D S. A Lévy flight for light [J]. Nature, 2008, 453: 495-498. 10.1038/nature06948 |
| 25 | GEZICI H, LIVATYALI H. Chaotic Harris hawks optimization algorithm [J]. Journal of Computational Design and Engineering, 2022, 9(1): 216-245. 10.1093/jcde/qwab082 |
| 26 | 刘景森,袁蒙蒙,李煜.基于改进的樽海鞘群算法求解机器人路径规划问题[J].计算机研究与发展,2022,59(6):1297-1314. 10.7544/issn1000-1239.20201016 |
| LIU J S, YUAN M M, LI Y. Robot path planning based on improved salp swarm algorithm [J]. Journal of Computer Research and Development, 2022,59(6): 1297-1314. 10.7544/issn1000-1239.20201016 |
| [1] | 李淦, 牛洺第, 陈路, 杨静, 闫涛, 陈斌. 融合视觉特征增强机制的机器人弱光环境抓取检测[J]. 《计算机应用》唯一官方网站, 2023, 43(8): 2564-2571. |
| [2] | 朱东莹, 钟勇, 杨观赐, 李杨. 动态环境下视觉定位与建图的运动分割研究进展[J]. 《计算机应用》唯一官方网站, 2023, 43(8): 2537-2545. |
| [3] | 王一, 谢杰, 程佳, 豆立伟. 基于深度学习的RGB图像目标位姿估计综述[J]. 《计算机应用》唯一官方网站, 2023, 43(8): 2546-2555. |
| [4] | 李永迪, 李彩虹, 张耀玉, 张国胜. 基于改进SAC算法的移动机器人路径规划[J]. 《计算机应用》唯一官方网站, 2023, 43(2): 654-660. |
| [5] | 王龙宝, 栾茵琪, 徐亮, 曾昕, 张帅, 徐淑芳. 基于动态簇粒子群优化的无人机集群路径规划方法[J]. 《计算机应用》唯一官方网站, 2023, 43(12): 3816-3823. |
| [6] | 邓辅秦, 黄焕钊, 谭朝恩, 付兰慧, 张建民, 林天麟. 结合遗传算法和滚动调度的多机器人任务分配算法[J]. 《计算机应用》唯一官方网站, 2023, 43(12): 3833-3839. |
| [7] | 刘晨, 陈洋, 符浩. 基于值函数迭代的持续监测无人机路径规划[J]. 《计算机应用》唯一官方网站, 2023, 43(10): 3290-3296. |
| [8] | 赵云涛, 谢万琪, 李维刚, 胡佳明. 基于协方差矩阵自适应进化策略的机器人手眼标定算法[J]. 《计算机应用》唯一官方网站, 2023, 43(10): 3225-3229. |
| [9] | 廖发康, 周亚丽, 张奇志. 变长度柔性双足机器人行走控制及稳定性分析[J]. 《计算机应用》唯一官方网站, 2023, 43(1): 312-320. |
| [10] | 范厚明, 牟爽, 岳丽君. 考虑冲突和拥堵的自动导引车调度与路径规划协同优化[J]. 《计算机应用》唯一官方网站, 2022, 42(7): 2281-2291. |
| [11] | 陈昇, 周隽, 胡小兵, 马霁. 基于混合模拟退火算法的机场进场程序优化[J]. 《计算机应用》唯一官方网站, 2022, 42(2): 606-615. |
| [12] | 张孟健, 王德光, 汪敏, 杨靖. 求解工程约束问题的新型智能优化算法及展望[J]. 《计算机应用》唯一官方网站, 2022, 42(2): 534-541. |
| [13] | 申炳琦, 张志明, 舒少龙. 移动机器人超宽带与视觉惯性里程计组合的室内定位算法[J]. 《计算机应用》唯一官方网站, 2022, 42(12): 3924-3930. |
| [14] | 张瑞, 张奇志, 周亚丽. 变长度弹性伸缩腿双足机器人半被动起步行走仿人控制[J]. 《计算机应用》唯一官方网站, 2022, 42(1): 252-257. |
| [15] | 李开荣, 刘爽, 胡倩倩, 唐亦媛. 基于转角约束的改进蚁群优化算法路径规划[J]. 计算机应用, 2021, 41(9): 2560-2568. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||