1. Introduction
The problem of parking difficulty limits the sustainable development of the Central Business District (CBD) of most cities. Due to the disequilibrium of high parking demand and low supply, vehicles are compelled to search for a vacated parking space until one car departs. These vehicles cruising for parking usually drive at low speeds, change lanes frequently and swerve hurriedly. They assemble a moving and invisible queue to deteriorate traffic congestion and pollution in the CBD of the city. From Donald Shoup’s observation in Los Angeles [
1], the cruising vehicles mixing in the normal traffic flow accounted for 30% and spent an average of 8 min to find a curbside lot. Nearly 1.61 million vehicle miles traveled (VMT) per year were wasted by cruising for parking, which consumed extra 47,000 gallons of gasoline, and emitted 730 tons of carbon dioxide (CO
2). Obviously, cruising for parking worsens traffic congestion and exacerbates air pollution.
Moreover, with the emergence of autonomous vehicles (AVs), the self-parking capability is likely to choose the lowest cost parking space around the trip destinations or not park at all. The extra floating trips of cruising for parking are also generated, while AVs search the cheaper peripheral parking space; or find the free on-street parking; or only cruise around the road to wait for the next trip. Consequently, any improvements in efficiency, energy consumption and parking requirements might be compensated by the increase in VMT that AVs cruising for the free parking and waiting for the next passenger would bring. Whether the future age of AVs or the current era of human-driven vehicles, the quantitative influence of cruising for parking must first be evaluated reliably.
Because the cruisers are usually hidden behind the normal traffic flow, it is difficult and costly to observe their influences directly. Previous parking studies mainly focused on alternative methods to measure and identify cruising behaviors without empirical data. And the cruising behaviors of AVs are also difficult to be verified in real-world traffic situations. Therefore, the quantitative effects of cruising for parking have been rarely modeled and studied, particularly with experimental data. In order to mitigate the influence of cruising parking on traffic congestions and emissions, the floating car experiment in park and visit tests of GPS trajectories were designed to collect the cruising behavior and calibrate the parameters of the cruising car-following model, and the videotape of traffic flows was used to identify the volume of cruising cars and the traffic status of normal traffic flow, simultaneously. Then the microscopic modeling of cruising for parking under the actual road network environment was constructed to estimate the quantitative impacts on traffic efficiency and emission. The sensitivity analysis was adopted for the different proportions of cruising traffic flow. Finally, the choices of parking locations and the changing positions of parking entrance-exit gates were discussed to optimize and minimize the negative effect of cruising for parking. The findings could explain how cruising cars add to the normal traffic that is already congested, and quantifies the worse situation of their influence.
The contributions of the study were as follows: (1) We quantified how cruising affects traffic efficiency. (2) We measured how cruising aggravates traffic emissions. (3) We showed how the locations and gates of parking lots affect traffic efficiency and emissions.
2. Literature Review
Cruising has aroused the extensive concern of scholars. For example, Shoup [
1] found that the average cruising time of vehicles was about 8 min, and about 30% of vehicles in the traffic flow were cruising vehicles. The On-Street Parking Management [
2] mentioned that when the parking was close to saturation (the occupancy rate is more than 85%), it was difficult for drivers to find parking spaces and cruise for parking. At the same time, the cruising traffic in the saturated parking congestion area usually accounts for more than 30% of the traffic flow. Arnott et al. [
3,
4,
5] and Van Ommeren [
6] both proved that cruising behavior aggravated traffic congestion. Zhu et al. [
7] found that between 9 and 56 percent of the traffic was cruising for parking, and the average search time was about 6.03 min. The low-speed, volume, high acceleration frequency and lane-change times of cruising cars had a negative effect on shortening on the travel time of the normal traffic flow.
Some scholars have used different methods to study the effect of cruising. Mannini et al. [
8] used floating car data (FCD) of the test vehicle to identify the cruising vehicles and model their cruising time. Geroliminis [
9] proposed a model of cruising. This model considered the dynamics of different types of vehicles when driving or cruising to the destination. The results showed that cruising for parking affected all vehicles in the road network. Levin et al. [
10] developed algorithms to provide optimal guidance to individual drivers on where to search for or reserve parking and how to navigate the traffic while searching for parking to alleviate the congestion caused by searching for parking. Dowling et al. [
11] introduced methods for analyzing a special class of networks of finite capacity queues. They applied this model to estimate the proportion of drivers cruising in the neighborhood of Belltown, Seattle, WA, USA. Using occupancy approximated by parking transaction data, the percentage of cruising for curbside parking was estimated by comparing the rate of drivers unable to find parking to bulk through traffic measurement data. Du et al. [
12] presented a method of mathematical programs with equilibrium constraints to determine the optimal sites of street parking facilities in a working area where drivers travel through or cruise for parking spaces in the morning commute. The optimal sites of street parking facilities incur the shortest queuing delay in the capacitated network. The results showed that the appropriate allocation should avoid parking spaces at the curbs of arterials where travelers drive for traversing the area and the streets intersecting the arterial. Van Ommeren et al. [
13] introduced a novel methodology to estimate the marginal external cruising time (and thus cost) across time and space: the marginal external cost of parking. This methodology makes it easy for cities to evaluate the optimality of their current parking fees and parking supply from a welfare perspective. Ding et al. [
14] built a parking-cruising behavior model on the road be considered the influence of time value, the results showed that the search time of non-work trips was longer than that of work trips. Arnott [
4] analyzed the change in parking search time from namely walking distance and parking space supply and demand and established a model with parking space occupancy rate as the optimal target. According to the research, activities in a specific period would aggravate the generation of parking cruising behavior. Lee et al. [
15] argued that perceived costs are one of the major drivers of the cruising behavior and drivers were not well informed on parking costs, even when they claim to be familiar with these costs.
Some scholars have explored the factors affecting cruising for parking and the mutual relations among these factors. Liu & Geroliminis [
16] used the Macroscopic Fundamental Diagram to find that commuters’ cruising distance and time for parking are higher with decreasing curbside parking vacancies during the morning peak. Qin et al. [
17] explored car drivers’ cruising behavior and location choice for curb parking in areas with insufficient parking space. Moreover, the results showed that the closer to the destination car drivers are, the more likely they choose to park on the curb. The results provided a better understanding of cruising behavior for parking and recommendations for reducing cruising for parking. Van Ommeren & Russo [
18] found that the average cruising time for parking is about 36 s when the price of curb parking is the same as off-street parking. Meanwhile, the cruising time for parking increases with travel time and parking duration.
Some scholars have also studied the optimization scheme to reduce AVs’ cruising for parking. Zhao et al. [
19] presented a centralized parking dispatch approach to optimize the distribution of floating AVs and provided regional route guidance. Moreover, the results proved that parking dispatch and regional route guidance of AVs were effective in reducing intense cruising for parking traffic. Shafiei et al. [
20] investigated the dynamics of travelers shifting to private-owned AVs from other transport modes and their negative impacts on road traffic congestion. The results indicated that the distance-based pricing scheme could effectively limit the usage of private AVs and reduce traffic congestion, especially in the city center and peripheral suburbs. Yet another study suggested that time-based congestion pricing was the key factor to hinder AVs from cruising that exacerbating congestion [
21].
Some scholars have studied the impact of cruising for parking on emissions. Based on a group of studies mentioned in Shoup [
1], the cruising time to find a vacant parking space was between 3.5 and 14 min. Searching for empty parking spaces leads to cruising and frequent stops which increases CO
2 emissions. Paidi et al. [
22] found that excess CO
2 emissions and non-optimal were mainly observed during visitor peak hours when there were limited or no empty parking spaces in the region of interest, which also leads to excess cruising. A facility location and allocation scheme was engaged to determine the optimal number and locations of public parking lots in Aydin’s study. Additionally, three objectives were considered: minimizing total facility establishment and operational cost, minimizing the average distance traveled, and minimizing CO
2 emissions within the system [
23]. Shen et al. [
24] proposed an optimal parking site selection scheme to alleviate CO
2 emissions of the traffic flows for green urban road networks. Through the creative dynamic traffic zone programming, a constrained model was set up to assess the impact of potential public parking locations on road traffic emissions. Čuljković [
25] found an adequate parking price can eliminate cruising for parking and provide significant effects on fuel savings and pollutant emissions. Ye et al. [
26] found that the traffic emission have an impact on the parking choice behavior of shared autonomous vehicles, and it is more significant in short-term parking than long-term parking, which means that travelers pay more attention to traffic emission in short-term parking than in long-term parking. Previous parking studies have mainly focused on the substitute methods to measure and identify cruising behaviors without empirical data. Moreover, the cruising behaviors of AVs were evaluated by the simulation framework and could not be verified in real-world traffic situations. In this paper, the experimental data were collected for modeling the impact of cruising for parking on traffic congestion and emissions.
3. Data Collection
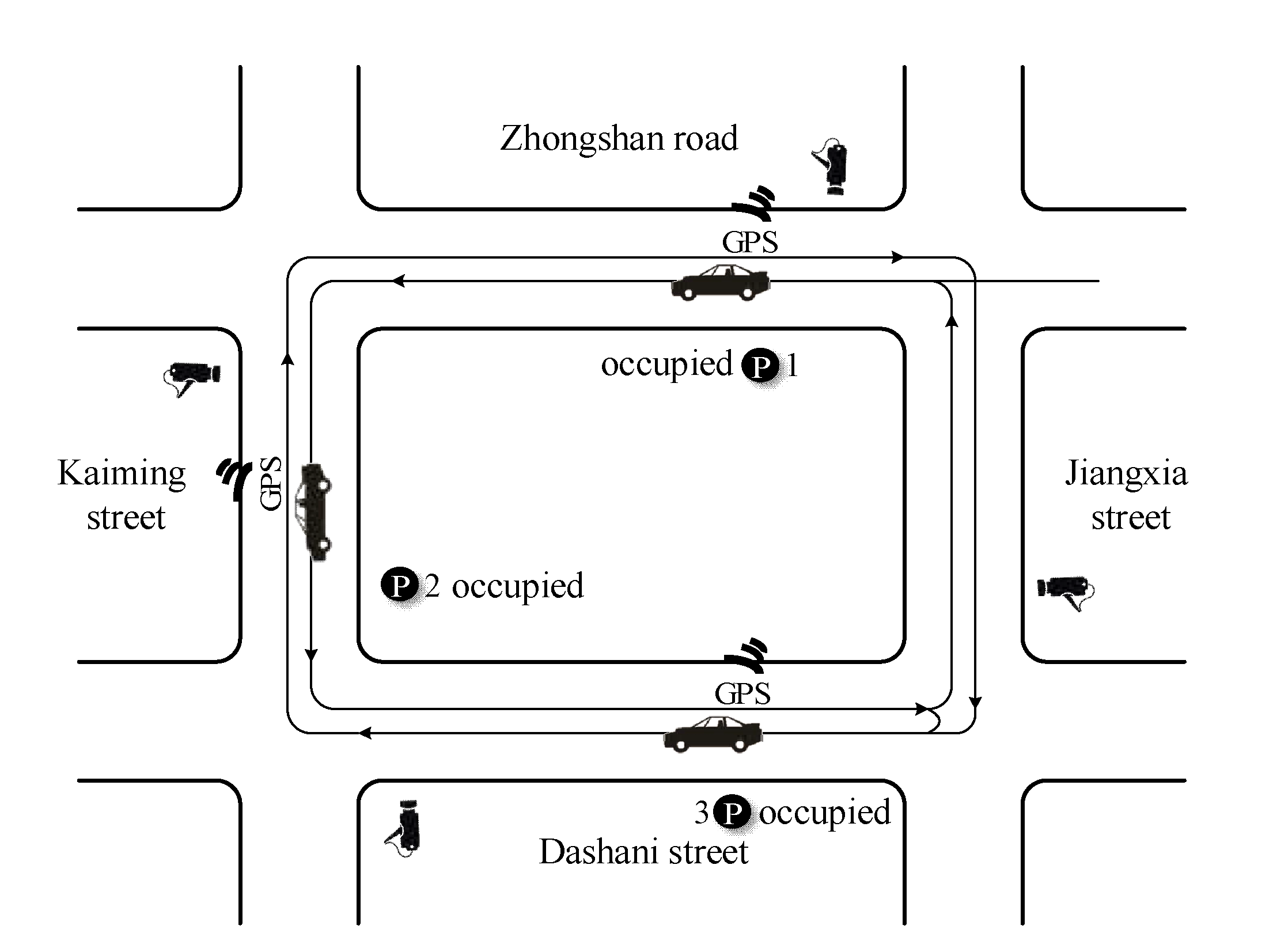
Park-and-visit tests with GPS and cameras were applied to capture the data of cruising for parking. GPS equipment was used to record the cruiser’s driving trajectory (latitude and longitude), velocity, acceleration and deceleration, lane-changes, number form stops and other data in the statistical intervals of 5 s. The cruising time of the experimental car for every park-and-visit test was also calculated by GPS data. As an analogy to the floating car experiment, two inside cameras were equipped in the cruising vehicle for recording the number of vehicles in the forward and reverse direction flow. As shown in
Figure 1, other cameras were set up at the observation points to measure the volume of cruising cars and the traffic status of normal cars. The cruising process is as follows: a moderate distance is chosen for experimental testing to ensure that the plan is feasible [
27]. Then the driver independently selects a destination and first choice parking lot within the survey area and informs the investigator to record the whole trip from the starting point to the destination without interference. If the first choice parking is occupied, the experimental vehicle starts to cruise for a vacated parking space around the study area. Until the cruiser finds an available parking space, the park and visit test could be finished once and drive out of the study area to start a new test.
Because high parking demand in the Tianyi Square CBD of Ningbo city creates a high probability of parking cruising behavior, the data collection was conducted in this area during the peak and off-peak hours (16:00–19:00). The 456 experiments were recorded in 14 days. The average cruising time of vehicles was 6.03 min, the average velocity of cruising cars was 13.53 km/h, the average acceleration was 0.25 m/s
2, the average acceleration times was 27.41, and the average lane-change times was 4.79. The speed-changes and lane-changes of cruising vehicles are significantly higher than normal traffic flow. More characteristic parameters of cruising vehicles were also obtained in
Table 1.
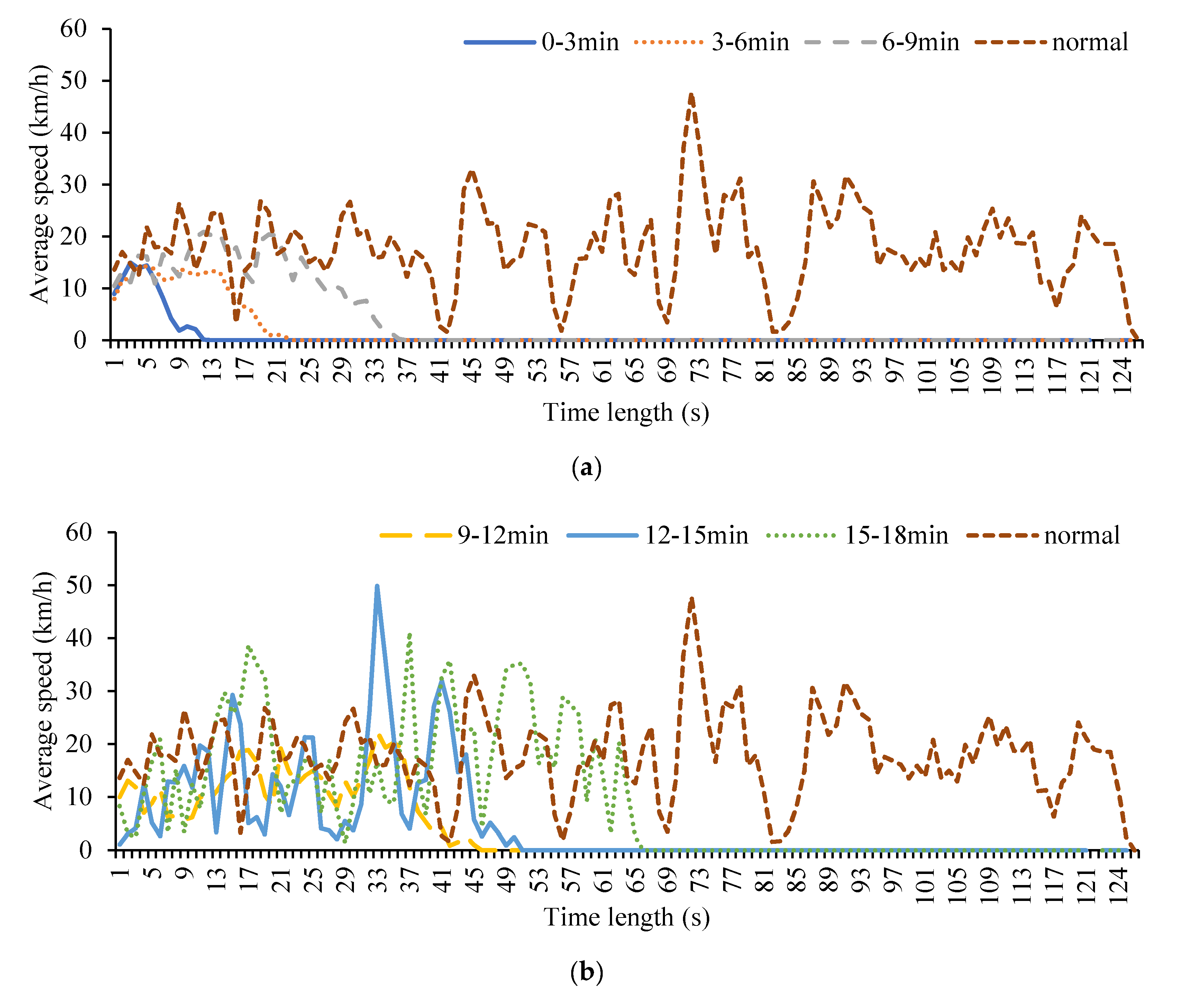
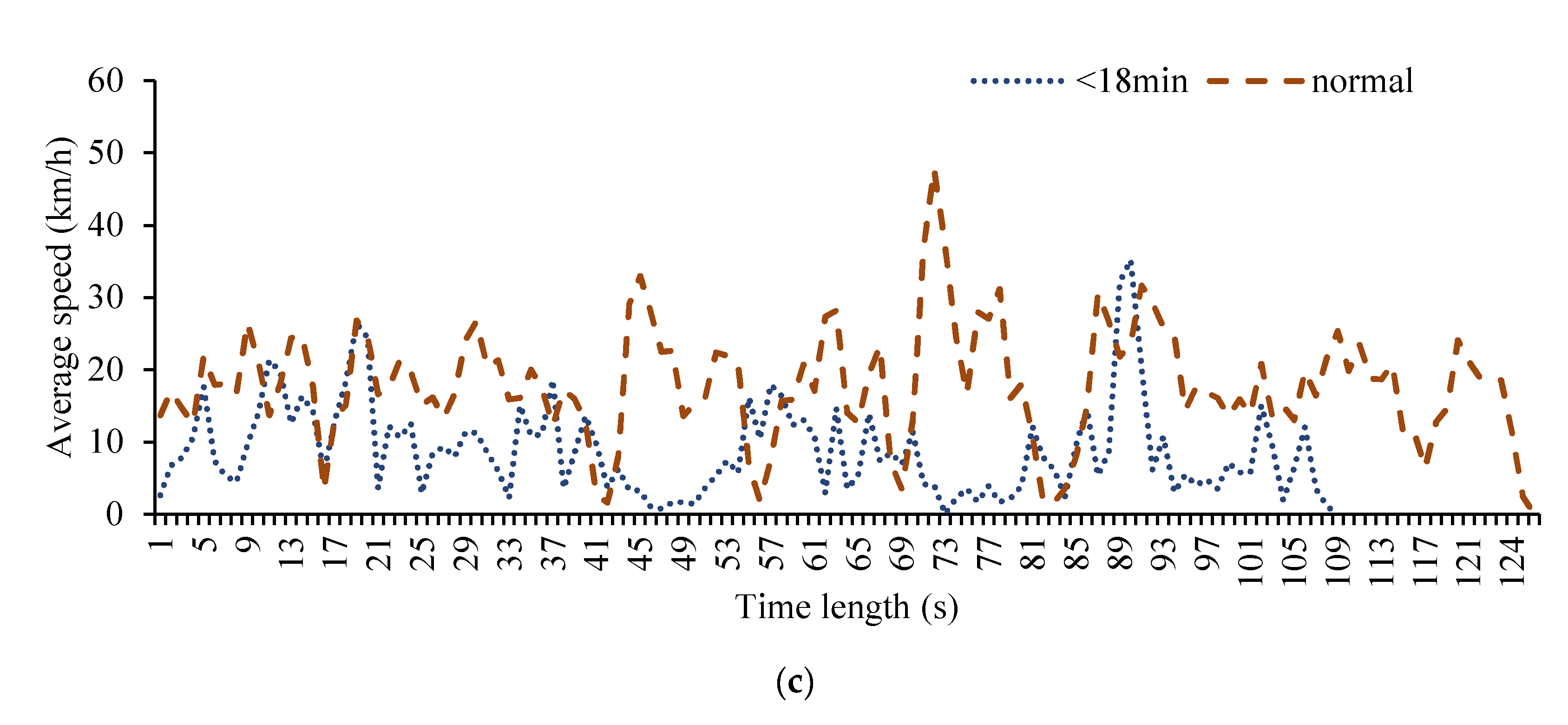
From the camera datasets, the average velocity of normal traffic flow is obviously higher than the cruisers, which is 22.13 km/h. The traffic flow of cruising for parking accounts for 9 and 56 percent. As shown in
Figure 2, the shorter the searching time by a cruising car, the more frequent speed changes were. After it was more than 12 min, the speed change presented periodic oscillations. Cruising for parking would result in a remarkable drop in the overall speed.
6. Layout Optimization of Parking Lots Based on Minimizing Cruising Distance
It can be concluded from the influential analysis of
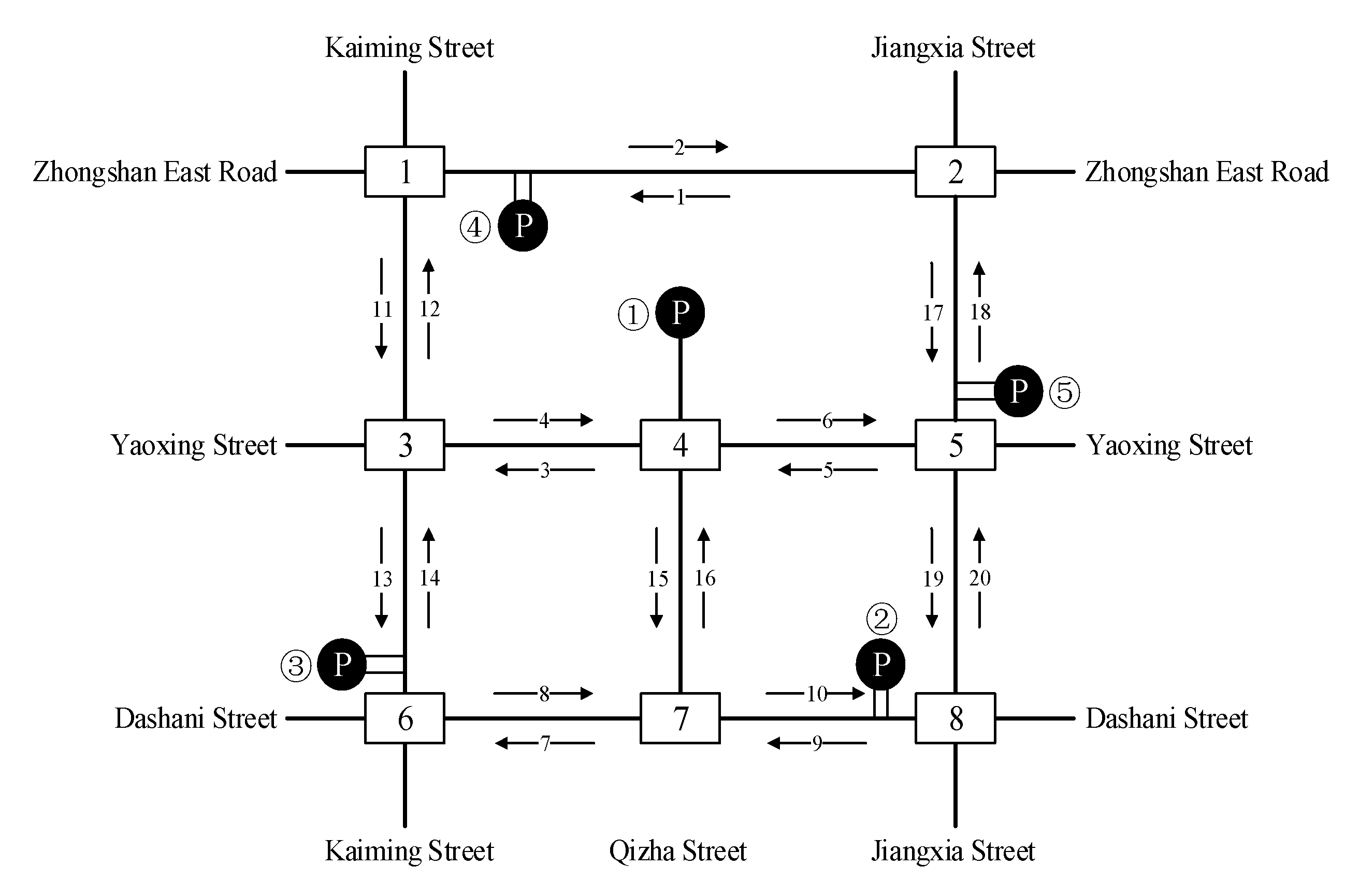
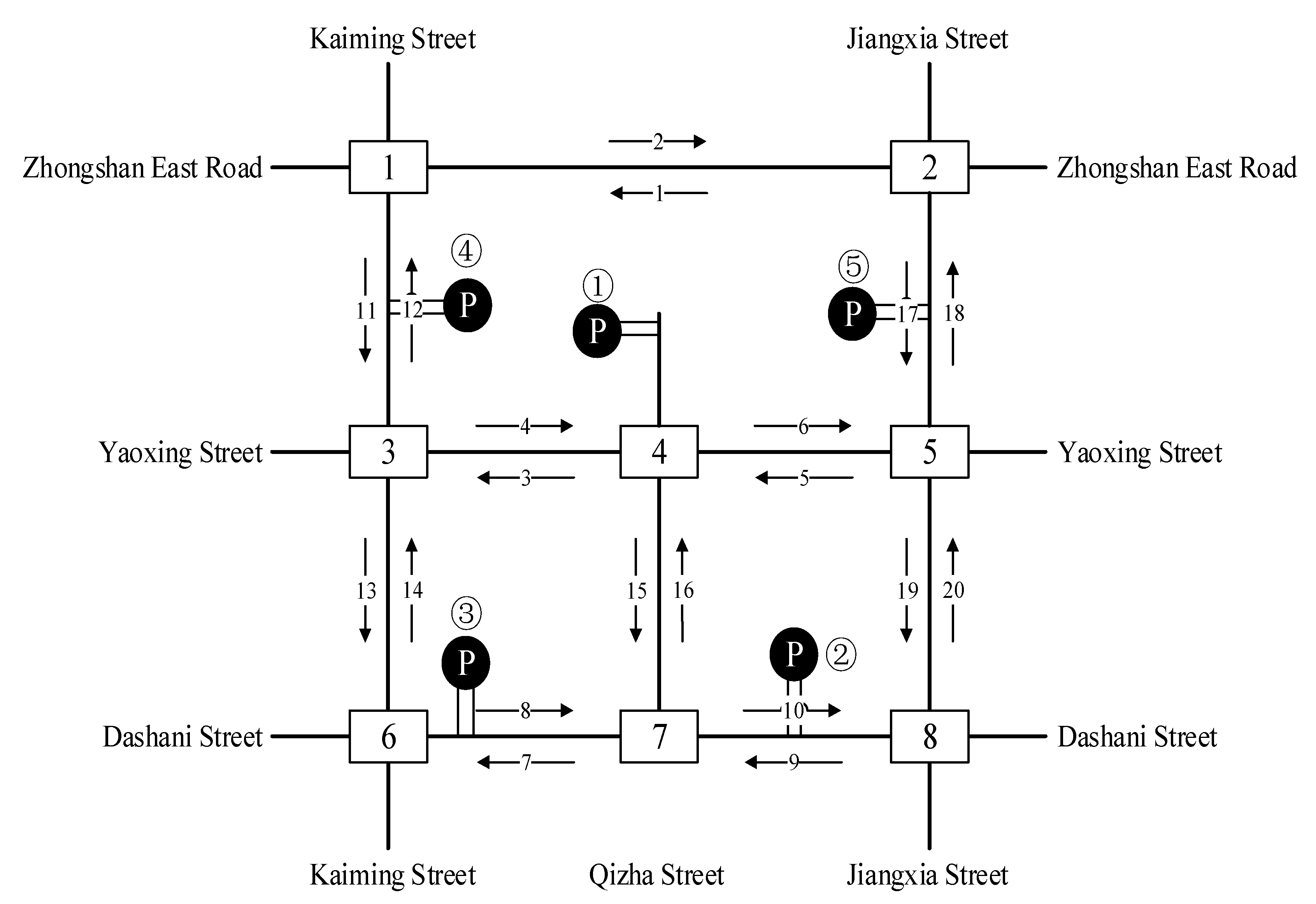
Section 5, the closer distances the intersections and sections are to the parking lot, the greater the impact is. Therefore, the cruising distance is reduced by changing the location and access road of the parking lot to minimize the influential effects. The current parking lots’ location and road access are shown in
Figure 24. Taking parking lot no. ① as an example, it is surrounded by large commercial and recreational buildings and has the highest parking demand in the CBD. Its access roads are located on the approaches to the Qizha and Yaoxing intersection. The main problems of current parking lot locations include: (a). Too close to the intersections; (b). Direct links among the five parking lots are much fewer to increase the cruising distances; (c). Access roads are set up near the approaches with a high level of traffic flow.
For details of negative impacts, parking lots no. ② and ③ are too close to the adjacent intersections and obstruct the diversion of the entrance and exit lanes at the intersections. So do parking lots no. ① and ④, they are also stuck the arterial roads of Yaoxing Streets. The access to parking lot no. ③ is located on the sidewalk and sorely threatens pedestrians’ safety. Overall, the connectivity of five parking lots is isolated on the road network. So it is difficult for cruising vehicles to search a vacant parking lot and increase detour distance. Sensitivity analysis under different locations and access roads of parking lots is applied for the optimization scheme while the simulation framework keeps other variables at the same level. The optimal scheme is shown in
Figure 24. The cruising vehicles could successively reach the remaining parking lots without repeated routes, to achieve path optimization, and effectively improve the accessibility and utilization of each parking lot.
Comparison of the optimal scheme with the current locations of parking lots, the queue length, vehicle delay, and traffic emissions (CO, NO
X, VOC, and Fuel consumption) significantly decreased in
Table 5. In order to further analyze the optimization degree of access roads, a representative parking lot no. ⑤ was selected and its corresponding intersection is no. 5. As shown in
Figure 25, the west approach at intersection no. 5 is significantly improved with average queue length shortened by 58.7%, traffic flow increased by 14.9%, average vehicle delay reduced by 40.1%, number form stops reduced by 18.5%, total emissions and fuel consumption reduced by 5.3%, 1.7%, 0.05% and 4.6%, respectively. Originally, the left-turn lane of west approach and the through-lane of south approach are the main routes for cruising vehicles to enter parking lot no. ⑤. After the parking location optimization, the cruising flow decreases. At the same time, fewer cruising vehicles make U-turns to enter the parking lot from the north approach, which reduces the obstruction of normal traffic flow and increases the traffic capacity of the north approach leading drivers to choose the shortest route for cruising for parking.
Similarly, the traffic efficiency and emissions for the road sections are improved dramatically by the optimal scheme in
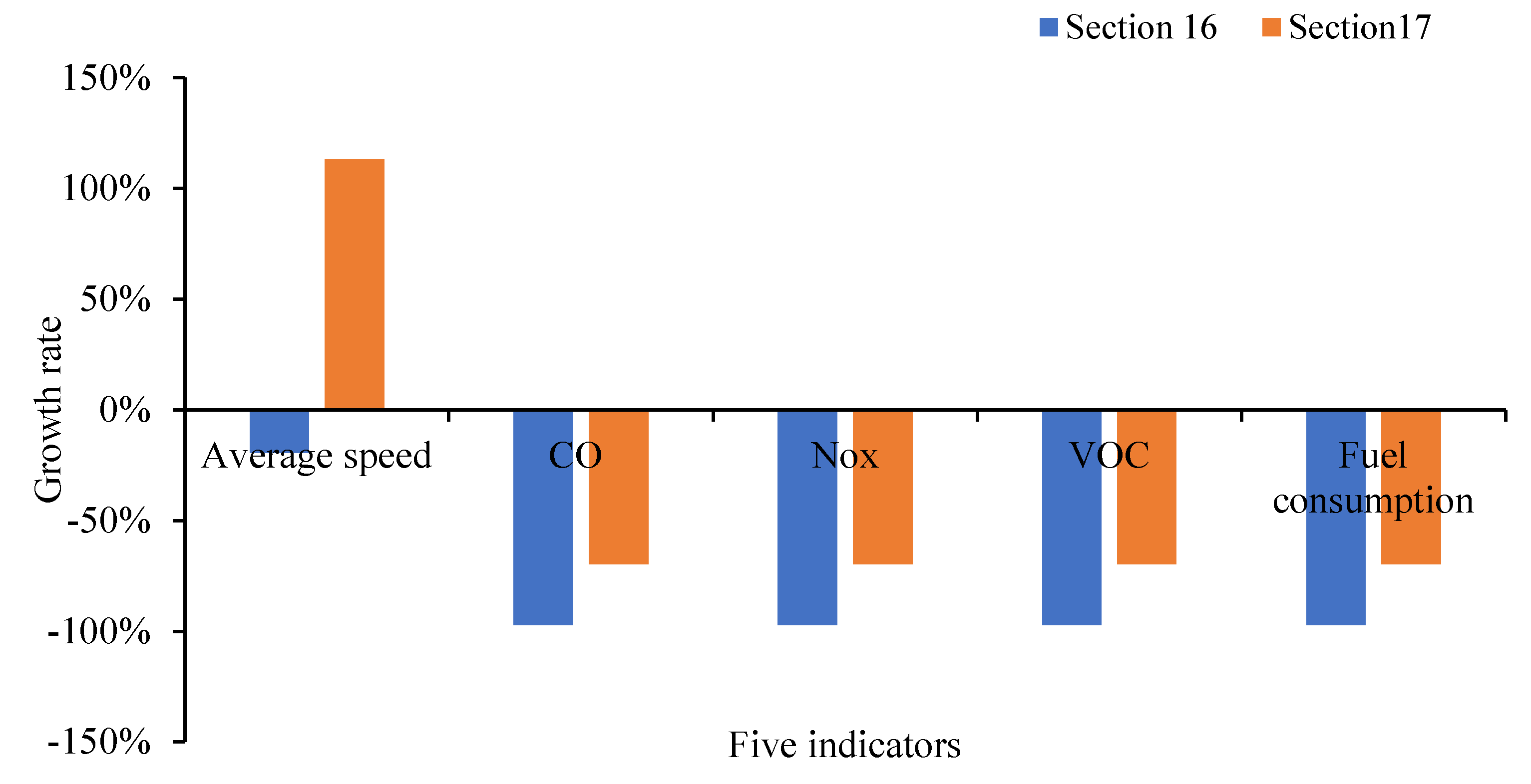
Table 6. The results before and after optimization of corresponding sections 16 and 17 relating to parking lot no. ⑤ are compared in
Figure 26. The speed of Section 16 is reduced by 19.4%, and CO, NO
x, VOC and fuel consumption were all reduced by 97.4%. Because the entrance and exit of the parking lot no. ⑤ relocated to Section 16, the overall speed of the section is reduced by the increase in cruising vehicles, while the total emissions were still reduced. The average speed of Section 17 increased by 113.4%, and CO, NO
X, VOC and fuel consumption all decreased by 69.7%. The overall influence of Section 17 is weakened. Combined with the influence of Section 16, the overall traffic condition is improved, indicating that the optimal location was feasible.
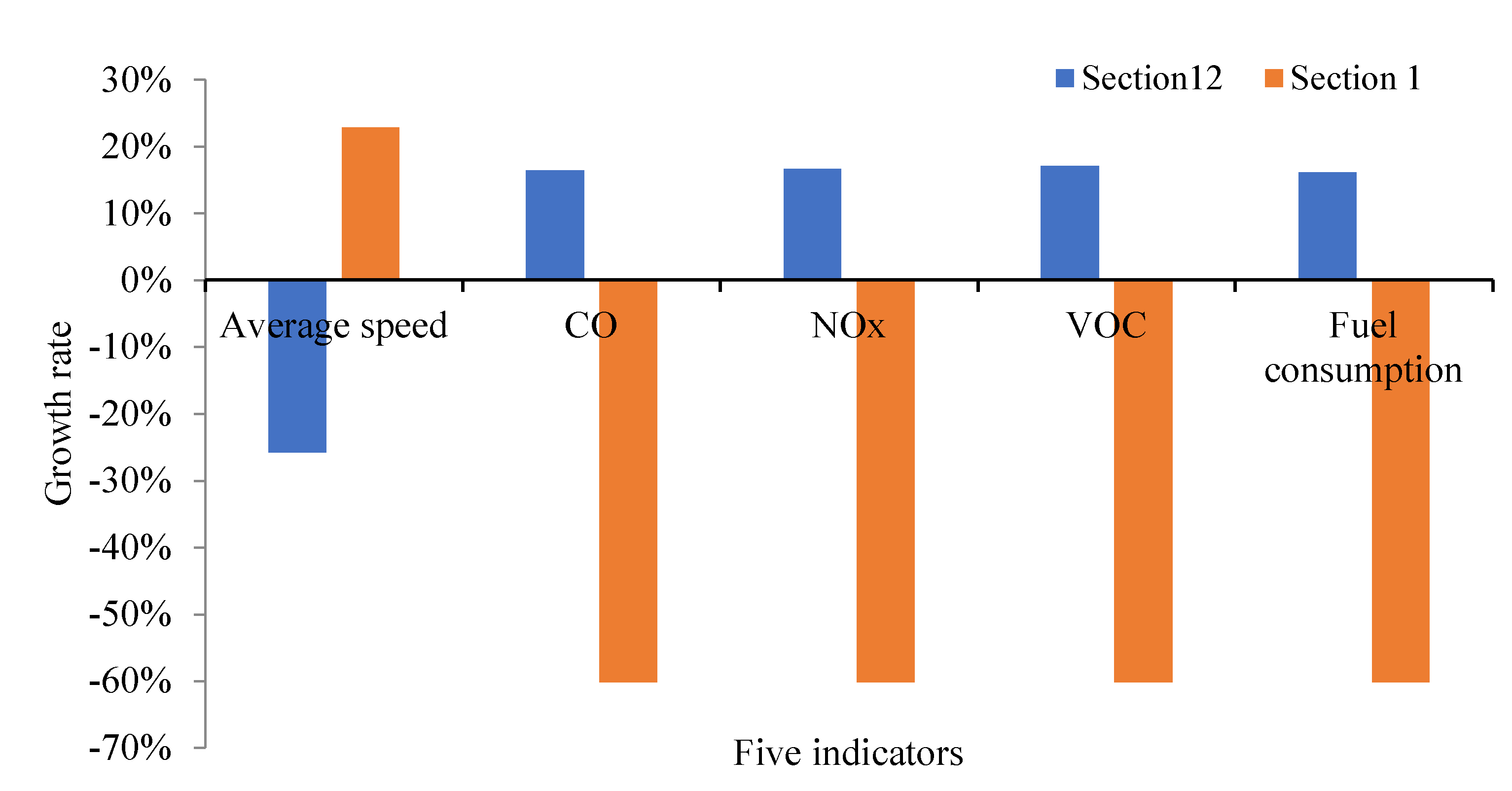
Furthermore, the results at sections 1 and 12 before and after optimization of parking lot no. ④ also significantly reduce the negative impact of cruising for parking behavior on the road network in
Figure 27.
It can be seen that average queue length, maximum queue length, average traffic volume, average vehicle delay, average number form stops, average speed and total emission at the sections and intersections are significantly improved compared with the current situation. Therefore, it can be concluded that the improved scheme has a significant effect on reducing the negative impact of cruising behavior.
7. Discussion and Conclusions
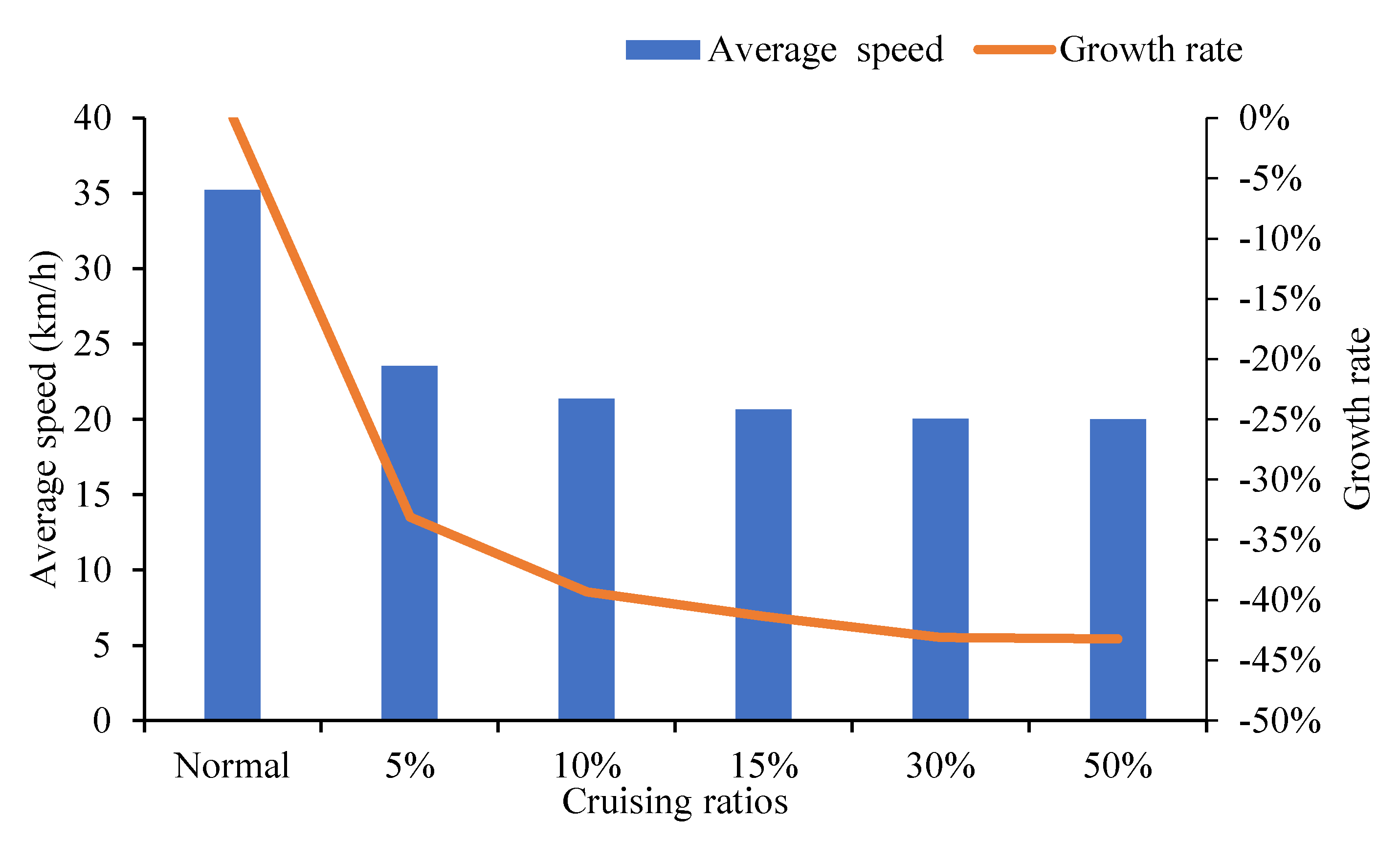
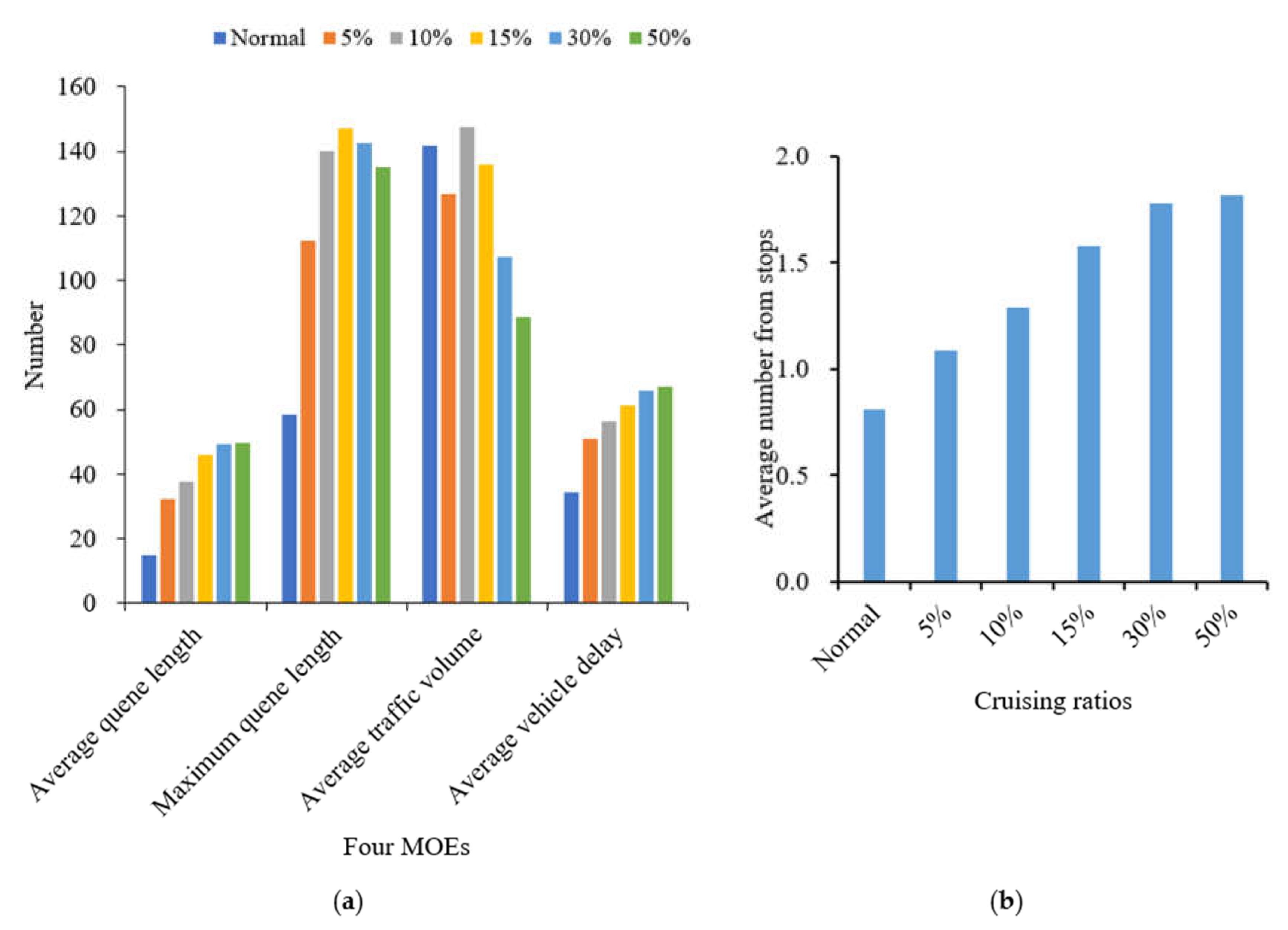
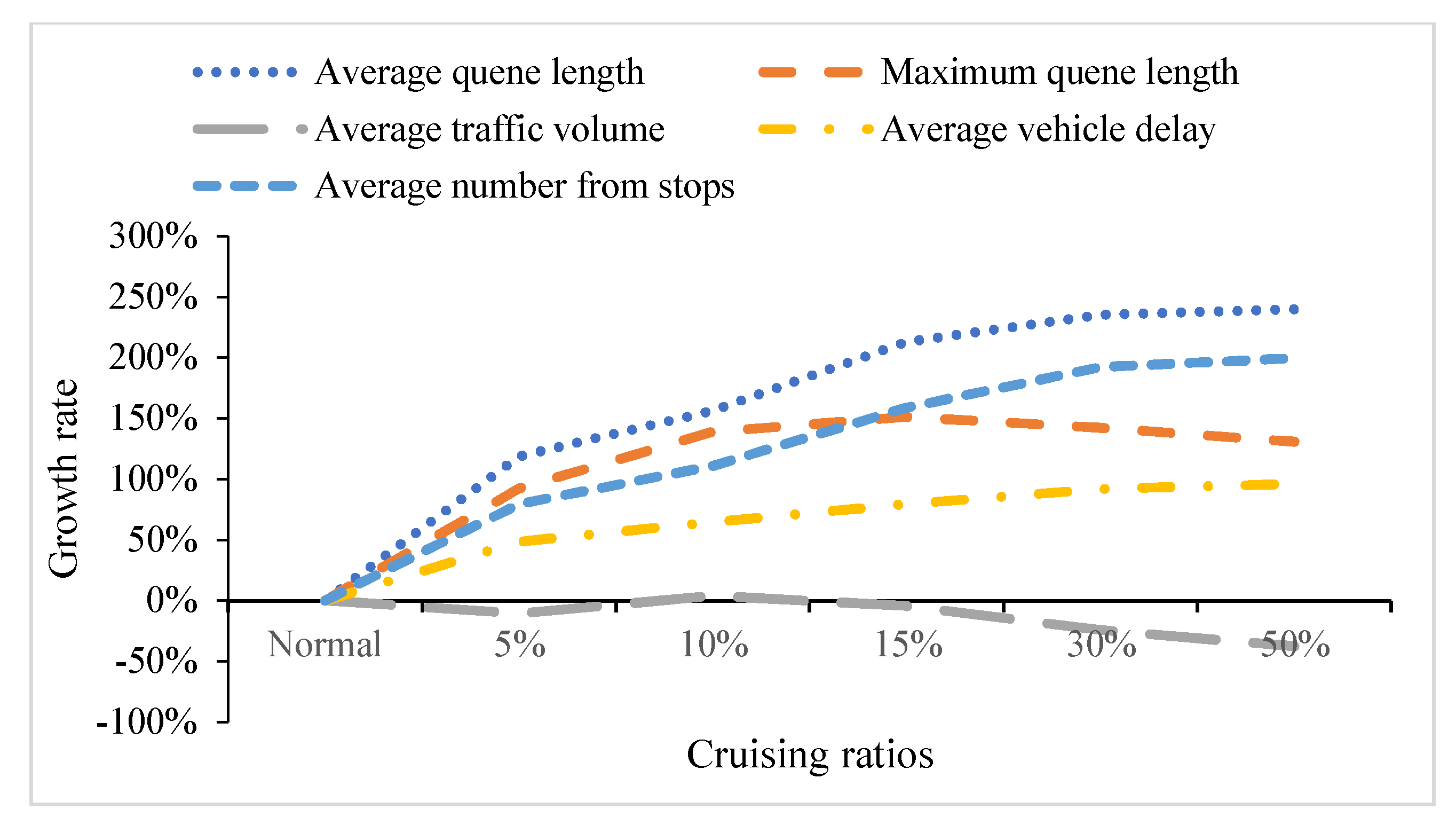
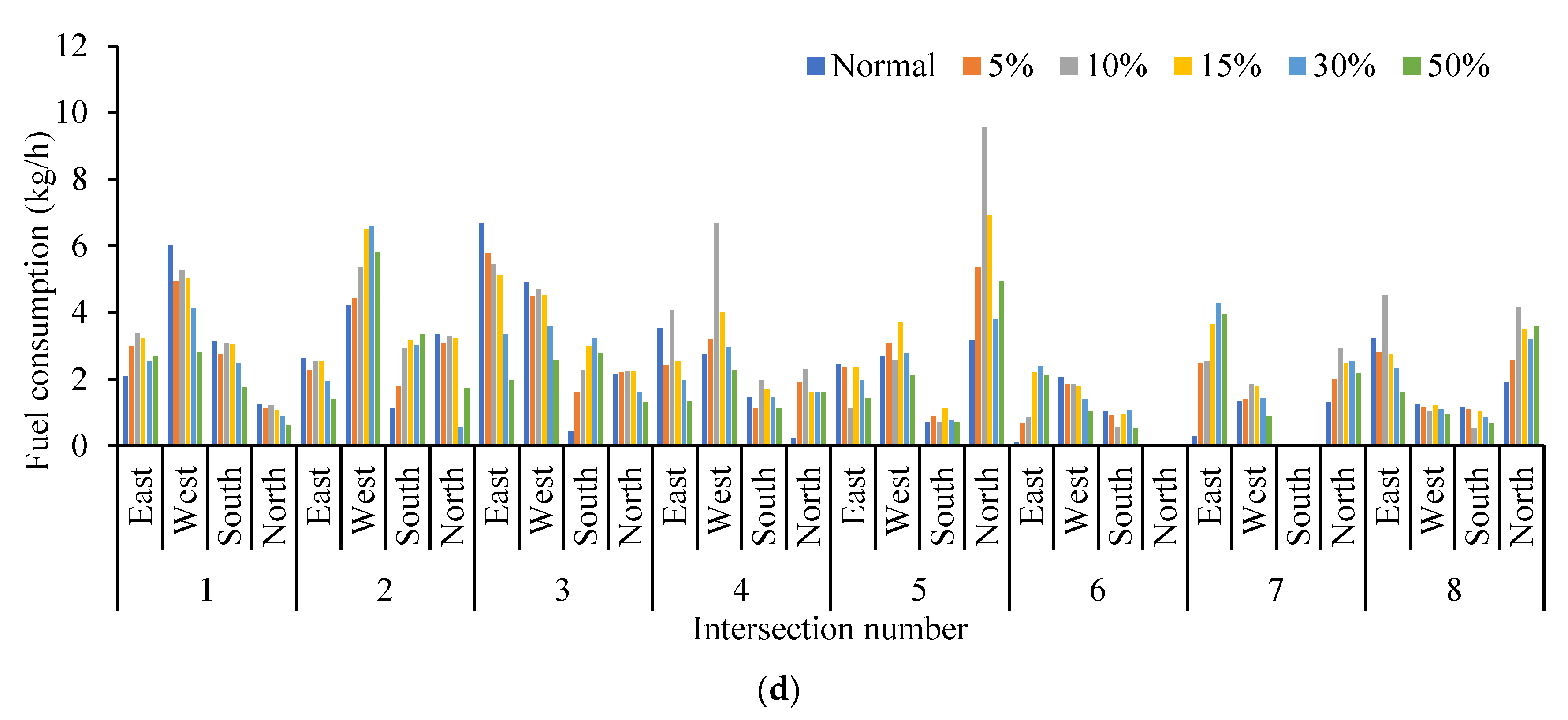
In this study, the parking-and-visit cruising tests with GPS and cameras were applied to collect the behavior of the cruisers, and the videotapes of traffic flows were used to measure the volume of cruising cars and the traffic status of normal cars, simultaneously. The simulation framework based on the microscopic VISSIM was proposed for reproducing the cruising vehicles and normal traffic flows. The car-following model of cruising vehicles was calibrated by GPS and video data. The scenarios under different cruising vehicle ratios were analyzed to quantitatively evaluate the influence of cruising for parking on the traffic efficiency and emission on the road section, intersection and network, respectively. Finally, the layout optimization changing the parking locations and positions of entrance-exit gates were discussed for minimizing the cruising distance and mitigating the negative effect. The results show that: (1) With the increase in the proportion of cruising vehicles, the average queue length, maximum queue length, average vehicle delay, average number from stops and total emissions all increase, showing a positive correlation, while the average speed and traffic volume are on the contrary. (2) The negative impact on the intersections is related to the connectivity degree with parking lot. The closer the distance is to the parking lot, the greater the negative effect is to the corresponding approach of the intersection. Similarly, the road sections accessing with entrance and exit of parking lots are significantly affected more than others. (3) The average speed of road network decreases with the increase in the proportion of cruising vehicles, and the average queue length, maximum queue length, vehicle delay, average number from stops and average total emissions all increase. The impact of cruising for parking behavior begins to slow down after the ratio is 15%. When the ratio reaches 30%, traffic efficiency on the road network reaches the carrying capacity. Traffic congestion is too serious, so the new vehicles can no longer enter the road network, and the hourly volume of the road network begins to decrease. The impact of cruising for parking deteriorates the LOS of traffic performance on the road network. (4) The cruising distance is reduced through changing the location and access road of the parking lot to minimize the influential effects. Sensitivity analysis results indicated that the entrance and exit accessing road network are set on the branch road for improving the connectivity of the network and allocating traffic pressure, which effectively mitigates the negative impact. The results provide a quantitative method for the hidden contribution of cruising for parking to traffic congestion and emission, and provide a new perspective for the improvement of traffic operation efficiency and traffic emission control. The quantitative influence of cruising for parking will be reliably evaluated for the age of AVs.
Additionally, the proposed microscopic perspective is beneficial to develop the optimal strategies to eliminate the influence of cruising for parking on traffic performance. The specific parking policies such as dynamic parking pricing, parking space reservation and intelligent parking guidance can be discussed and assembled into the proposed model. This work will be extended in future studies to evaluate the cruising for parking behavior of AVs.





































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}