
Abstract
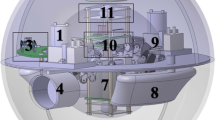
The ability of amphibious movement is found widely among small animals such as frogs, tortoises, snakes, and crabs. They can move on land, in water, and even on the water bottom. Inspired by the animals’ moving capability, an amphibious spherical robot with flywheel, pendulum, and propeller has been developed. In this paper, the mechanical structure, motion performance, control architecture, and experimentation of the amphibious spherical robot are presented. The robot can show three outstanding advantages for underwater observation, which distinguish it from the other existing observing robots. First, it can resist great water pressure to protect the internal components that is based on the spherical shell. Second, the robot only requires a single propeller to achieve the flexible movement and control posture in water. Third, the robot can roll on land or on water bottom only through an internal motor that can reduce the energy consumption during the observation process. The robot has a wide range of applications such as underwater observation, search and rescue, sensor networks.
Similar content being viewed by others


References
Storkersen, N., Kristensen, J., Indreeide, A.: Hugin-UUV for seabed surveying. Sea Technol. 39(2), 99–104 (1998)
U.S. Department of the Navy: The navy unmanned undersea vehicle(UUV) master plan (2004)
Bachmayer, R., Leonard, N.E., Graver, J.: Underwater gliders: recent developments and future applications Proceedings of the 2004 International Symposium on Underwater Technology, Taipei, Taiwan, pp 195–200 (2004)
Shu-xin, W., Xiu-jun, S., Yan-hui, W.: Dynamic modeling and motion simulation for a winged hybrid-driven underwater glider. China Ocean Engineering 1(25), 97–112 (2011)
Wang, C., Zhang, F., Schaefer, D.: Dynamic modeling of an autonomous underwater vehicle. J. Mar. Sci. Technol. 20(2), 199–212 (2015)
Alam, K., Ray, T., Anavatti, S.G.: Design and construction of an autonomous underwater vehicle. Neurocomputing 142(1), 16–29 (2014)
Choi, H.T., Hanai, A., Choi, S.K.: Development of an underwater robot, ODIN-III IEEE International Conference on Intelligent Robots and Systems, pp 836–841 (2003)
Do, K.D., Jiang, Z.P., Pan, J.: Global output feedback universal controller for stabilization and tracking of underactuated ODIN-an underwater vehicle Proceedings of the IEEE Conference on Decision and Control, pp 504–509 (2002)
Antonelli, G., Chiaverini, S., Sarkar, N., West, M.: Adaptive control of an autonomous underwater vehicle: experimental results on ODIN. IEEE Trans. Control Syst. Technol. 9(5), 756–765 (2001)
Watson, S.A., Crutchley, D.J. P., Green, P.N.: The design and technical challenges of a micro-autonomous underwater vehicle (μAUV) ∗ Proceedings of the 2011 IEEE International Conference on Mechatronics and Automation, Beijing, China, August 7–10, pp 567–572 (2011)
Watson, S.A., Green, P.N.: A de-coupled vertical controller for micro-autonomous underwater vehicles (μAUV) ∗ Proceedings of the 2011 IEEE International Conference on Mechatronics and Automation, Beijing, China, August 7–10, pp 561–566 (2011)
Guo, S., Lin, X., Tanaka, K., Hata, S.: Modeling of water-jet propeller for underwater vehicles Proceedings of the 2010 IEEE International Conference on Automation and Logistics, pp 92–97 (2010)
Guo, S., Lin, X., Tanaka, K., Hata, S.: Development and control of a vectored water-jet based spherical underwater vehicle Proceedings of the 2010 IEEE International Conference on Information and Automation, pp 1341–1346 (2010)
Xichuan, L, Shuxiang, G.: Development of a spherical underwater robot equipped with multiple vectored water-jet-based thrusters. J. Intell. Robot. Syst. 67(3), 307–321 (2012)
Xiaojuan, L., Hanxu, S., Qingxuan, J.: The hydrodynamic analysis for the underwater robot with a spherical hull Proceedings of SPIE - the International Society for Optical Engineering, Space Exploration Technologies II, Orlando, USA, pp 73310E-1–73310E-8 (2009)
Li, Y., Sun, H., Chu, M., Zhang, Y., Qingxuan, J., Xiaojuan, L.: Experiment, simulation and analysis on coupling hydrodynamic forces under key parameters for a spherical underwater exploration robot. Journal of Vibroengineering 16(6), 3014–3025 (2014)
Li, Y., Sun, H., Zhang, Y., Chu, M., Qingxuan, J., Xiaojuan, L.: Characteristic analysis and fluctuation control for a underactuated spherical underwater robot. Journal of Vibroengineering 16 (1), 42–56 (2014)
Liu, D., Sun, H., Jia, Q.: Stabilization and path following of a spherical robot IEEE Conference on IEEE Robotics, Automation and Mechatronics, 2008, pp 676–682 (2008)
Yoon, J.C., Ahn, S.S., Lee, Y.J.: Spherical robot with new type of two-pendulum driving mechanism 2011 15th IEEE International Conference on IEEE, pp 275–279 (2011)
Qingxuan, J., et al.: Motion control of a novel spherical robot equipped with a flywheel International Conference on Information and Automation IEEE, pp 893–898 (2009)
Kaznov, V., Seeman, M.: Outdoor navigation with a spherical amphibious robot IEEE/RSJ International Conference on Intelligent Robots & Systems, pp 5113–5118 (2010)
Kaznov, V., Seeman, M.: Rotundus groundbot is climbing slopes. Rotundus AB, Stockholm, Sweden, videorecording. [Online]. Available: http://www.youtube.com/watch?v=ZcSb9F2Xn10 (2009)
Kaznov, V., Seeman, M.: Rotundus groundbot water tests. Rotundus AB, stockholm, Sweden, videorecording. [Online]. Available: http://www.youtube.com/watch?v=tUIJ3d8XNI (2009)
Yue, C, Guo, S, Shi, L.: Hydrodynamic analysis of the spherical underwater robot SUR-II. Int. J. Adv. Robot. Syst. 10(3), 119–134 (2013)
Li, M., Guo, S., Hirata, H., et al.: Design and performance evaluation of an amphibious spherical robot. Robot. Auton. Syst. 64, 21–34 (2015)
Lin, B., et al.: Kinematic analysis on land of an amphibious spherical robot system IEEE International Conference on Mechatronics and Automation IEEE, pp 280–96 (2015)
Yanlin, H., et al.: Numerical simulation and hydrodynamic analysis of an amphibious spherical robot IEEE International Conference on Mechatronics and Automation IEEE (2015)
Lin, B., Guo, J., Guo, S.: Virtual prototyping technology-based dynamics analysis for an amphibious spherical robot IEEE International Conference on Information and Automation IEEE (2015)
Pan, S., Shi, L., Guo, S.: A Kinect-based real-time compressive tracking prototype system for amphibious spherical robots. Sensors 15(4), 8232–8252 (2015)
He, Y., Shi, L., Guo, S., et al.: Preliminary mechanical analysis of an improved amphibious spherical father robot. Microsyst. Technol. 99(6), 1–16 (2015)
Author information
Authors and Affiliations
Corresponding author
Additional information
This study was supported by the Science and Technology Research Program of Chongqing Municipal Education Commission (GrantNo.KJ1704107), the National Science Foundation of China (Grant No. 51175048) and the Chongqing Science and Technology Commission (Grant No. CSTC2015jcyjBX0066).
Rights and permissions
About this article

Cite this article
Li, Y., Yang, M., Sun, H. et al. A Novel Amphibious Spherical Robot Equipped with Flywheel, Pendulum, and Propeller. J Intell Robot Syst 89, 485–501 (2018). https://doi.org/10.1007/s10846-017-0558-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10846-017-0558-x