
Abstract
Unsupervised machine learning using an unsupervised vector quantization neural network (UVQ-NN) integrated with meta-geometrical attributes as a novel computation process as opposed to traditional methodologies is currently used effectively in the 3D seismic structural interpretation for high-resolution detection of fault patterns, fracture network zones, and small-scale faults (SSFs). This technology has a crucial role in locating prospective well sites and building a 3D structural model while saving time and cost. The innovation of the current workflow involves combining geostatistical and structural filtering, optimal geometrical seismic attributes, UVQ-NN for automatic major faults, fracture network zones, and SSFs volumes extraction due to the unavailability of well logs and cores. To sharpen the fault edges and discontinuities, a steered volume was first extracted. Structural filters were then applied to the 3D volume, first with a dip-steered median filter (DSMF), followed by a dip-steered diffusion filter (DSDF), and finally, both DSMF and DSDF were combined to generate the fault enhancement filter (FEF). After that, optimal geometrical attributes were computed and extracted, such as similarity, FEF on similarity, maximum curvature, polar dip, fracture density, and thinned fault likelihood (TFL) attributes. Finally, selected attributes were inserted as the input layer to the UVQ-NN to generate segmentation and matching volumes. On the other hand, the TFL was used with the voxel connectivity filter (VCF) for 3D automatic fault patches extraction. The results from the UVQ-NN and VCF identified the locations, orientations, and extensions of the main faults, SSFs, and fracture networks. The implemented approach is innovative and can be employed in the future for the identification, extraction, and classification of geological faults and fracture networks in any region of the world.
Article highlights
-
(1)
Using an unsupervised vector quantization neural network (UVQ-NN) integrated with meta-geometrical attributes used effectively in the 3D-seismic structural interpretation for high-resolution detection of fault patterns, fracture network zones, and small-scale faults (SSFs).
-
(2)
Seismic conditioning includes geostatistical and geometrical filters help to improve and polish the seismic data's structural features.
-
(3)
The role of voxel connectivity filter and unsupervised machine learning combined with geometrical attributes in hydrocarbon exploration.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Accurate extraction of fault patterns is crucial for both structural interpretation and modeling, thereby enhancing the understanding of different geological structures and structural and combined hydrocarbon traps (Zeng 2010; Ashraf et al. 2020; Zhou et al. 2022; El Dally et al. 2023). In general, small-scale faults (SSFs) are accountable for a minimal percentage of seismic activities. These have an offset of around 25–50 m (Clausen and Korstgåd, 1993), and may reach approximately 2–4 km; however, they only have minor throws in the range of forty meters (Jia 2013). The throw is mainly influenced by tiny variations in fault trace geometry because of the irregularity of the exposure (Camanni et al. 2023). Moreover, as the throw on a fault surface increases, the relevance of throw segmentation caused by a bend diminishes (Roche et al. 2021). The exploration through evaluation of the SSFs in varied reservoir rocks is a challenging step that affects the interpretation accuracy in basin analysis, tectonic analysis, and reservoir exploration (Yin et al. 2018). Furthermore, since SSFs include all types of faults and may have various complex characteristics, it can be challenging to classify them effectively (Boro et al 2014; Wennberg et al. 2016). SSFs give critical information relating to tectonics, the flow, and the trapping of hydrocarbon (Zeng 2010).
SSFs have a tendency to cause highly complex hydrocarbon reservoirs, mainly in those fields that demonstrate a high degree of variability and poor uniformity of lateral facies distributions (Zhang et al. 2011). In addition, SSFs frequently make reservoirs extremely challenging to extract. Limits and directions may be obtained by the analysis of SSFs, which is essential for the prospect characterization and development of reservoirs (Ameen and Hailwood 2008). It is standard procedure for interpreters to manually identify faults on seismic data to complete thorough fault interpretation, a process that may be challenging and time-consuming. Whenever faults and fractures are manually interpreted, there is a very significant level of uncertainty (Peace et al. 2018), and this is certainly relevant in basins where there is a lack of seismic data. Several publications recently presented examples that highlight the significance of fault classification using a wide range of methods in CCS, EGS, and hydrocarbon exploration. Because of this, an approach that is both efficient and accurate is required to identify these SSFs (Basir et al. 2013; Riaz et al. 2019).
Generally, various ML methods have been used for automatic horizon picking (Yang and Sun 2020), facies interpretation (Bressan et al. 2020; Alzubaidi et al. 2021; Hou et al. 2023), automatic channel detection (Pham et al. 2019; Ismail et al. 2022), salt dome detection (Waldeland et al. 2018), signal enhancement and seismic image denoising (Liu et al. 2022), and gas chimney detection (Ramya et al. 2020; Ramu et al. 2021; Ismail et al. 2022; Eid et al. 2023). To improve fault interpretation, many approaches for calculating fault parameters have been developed. One of the most often utilized methodologies is coherence attributes, which are described by fault likelihood (FL) and thinned fault likelihood (TFL) characteristics and evaluate 3D structural and stratigraphic features and geobodies (Hale 2013; Ashraf et al. 2020; Zhou et al. 2022).
In addition, there is a significant amount of scientific interest in employing artificial intelligence approaches for automatic fault detection, such as the Convolutional NNs (CNNs) (Lou et al. 2022a), supervised with a synthetic dataset (Wu et al. 2019; Li et al. 2022; Lou et al. 2022b), 3D-FaultSeg-UNet (Van-Ha and Thanh-An 2022), seismic fault attribute estimation using a local fault model (Lou et al. 2019), unsupervised learning method (Ashraf et al. 2020; Liu et al. 2022), and deep neural networks are presented for pixel-by-pixel segmentation (Kadlec et al. 2008; Schultz et al. 2009; Di et al. 2018; Guo et al. 2018; Hale 2013; Zhou et al. 2022). Furthermore, deep learning is used for fault interpretation to minimize the gap between synthetic and real data (Zhou et al. 2021).
2 Geologic setting
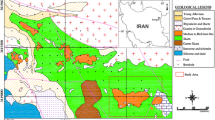
The Taranaki Basin in the western part of the New Zealand subcontinent represents an enormous Late Cretaceous-Cenozoic depositional system (Fig. 1). The basin is subdivided into two main structural provinces: a stable platform in the west and the eastern mobile belt (King 2000; Uruski et al. 2003; Stagpoole and Nicol 2008; Radwan et al. 2021; Radwan and Nabawy 2022). The Western province constitutes a 150 km wide platform stretching below the continental shelf. This region comprises a broad basement province covered with a thick sedimentary pile (~ 6000 m). The eastern belt is 80 km wide mobile province consisting of a series of rift basins. The Taranaki Basin was developed related to a rifting phase in the Late Cretaceous. During this period, the separation between the New Zealand plate and the Australian plate developed. Therefore, a series of half-grabens were formed and the syn-rift deposition took place until the latest Paleocene. This sequence was dominated by clastic facies that rapidly-filled the half-grabens (Forder and Sissons 1992; King 2000). In the Early Eocene, the basin became a passive margin, and widespread shallow marine sand, and coal were precipitated due to a marine transgression period. Thermal subsidence prevailed throughout the Eocene due to the effects of sag-related thermal decay.

a Regional geological and structural map of New Zealand, b base map of the Kerry 3D seismic cube showing inline and crossline ranges
The change from extensional to compressional tectonism occurred after the end of the Eocene. Oligocene compressive phase resulted in development of a rapid subsiding fore-deep in the eastern part of Taranaki Basin (Abdelmaksoud and Radwan 2022; Leila et al. 2022). Moreover, a foreland basin was formed at that time, several pronounced compressional structures were developed during the early Miocene. An uplift occurred in the southern part of New Zealand offering an enormous source of terrigenous materials that entered the deep water settings as turbidities (King 2000; Ainsworth and van der Pal 2004).
An extensional-wrenching phase occurred during the latest Miocene, this event was associated with a back-arc spreading. It is formed by a voluminous subsidence in the mobile eastern belt and a rapid accumulation of thick, deep marine clastics. The western boundary fault- the Cape Egmont fault system- of the eastern mobile belt was created at this time. In the west, the western platform remained unaffected by these structural regimes where a passive sag continued virtually uninterrupted throughout the Paleogene-Neogene.
The Cape Egmont Fault, bordering the Maui field from the east, was a major reverse fault in the Miocene (Thrasher 1990, 1991), but has been downthrown since that time. The hanging wall basement block of Taranaki Fault overthrust Taranaki Basin sedimentary sequence, with up to 6 km of vertical basement offset. The Tarata Fault Zone consists of a set of echelon thrusts, mainly east-dipping, and associated anticlines, as well as backthrusts at some localities. The vertical offset is generally in the order of 700–1000 m, reaching around 1500 m in the Waihapa structure to the south (Bulte 1989, Palmer and Bulte 1991). The Waimea-Flaxmore Fault System (WFFS) represents one of the largest, active reverse fault system situated along the western side of the plate boundary in the northern South Island. WFFS dissects the Alpine Fault at its southern termination. To the northeast, this system joins the Manaia Fault in the offshore areas (Bull et al. 2019; Ghisetti et al. 2020; King and Thrasher 1996; Langridge et al. 2016; Rattenbury et al. 2016). The Manaia Fault is the most important reverse fault in the area south of the Kupe South field, as the reverse offset of the nearby Taranaki Fault decreases rapidly to the south. Near the southern end of the Taranaki Fault, basement is offset by up to 3.5 km on the Manaia Fault (McDougall and Thrasher 1991).
Taranaki Basin hosts a complex and heterogeneous sedimentary succession (Fig. 2). From Cretaceous to Eocene, a thick sequence of continental sandstones and swamp coal interbeds was accumulated in the southern sector of the mobile belt (North Cape Formation, Farewell Formation) (Pilaar and Wakefield 1978; Palmer and Bulte 1991). This sequence changes laterally northwestward todeltaic/parallic sediments, barrier bars and offshore turbidites and mudstones (Turi Formation). In the Late Eocene, the eastern part of the basin was dominated by fine-grained clastic sediments, due to the rapid subsidence of a fore-deep (Higgs et al. 2012; Strogen et al. 2017; Leila et al. 2022; Radwan et al. 2022). The Turi Formation is followed by the Tikorangi carbonates that were accumulated in both the western and eastern parts of the basin (King and Thrasher 1996; Elmahdy et al. 2023). During the Miocene, a rapid subsidence of the basinal fore-deep prevailed resulting in the deposition of the deep-water bathyal mudstones of the Manganui Formation. Moreover, synchronous deposition of the Moki and Mount Messenger formations took place in palaeobathymetric lows of the eastern belt (Radwan et al. 2021, 2022). Additionally, the Giant Foresets represents a southeast prograding wedge of deposits that were accumulated during a period of increased detritus supply. Another phase of rapid subsidence took place during the Early Pliocene which produced a local deep-water conditions, however, in the Late Pliocene the basin became fully-filled with prograding shelf/slope siliciclastics (Knox 1982; Kamp et al. 2004). The study area (Kerry Field) locates in southern edge of Manaia Anticline. The region is highly-fractured with a NW–SE trending normal fault pattern (Schmidt and Robinson 1990) (Fig. 1). The reservoir section in the Kupe–Momoho area is a +400 m thick sequence of Paleocene lithic sandstones and shales overlain by Oligocene mudstones of the Otaraoa Formation. The Paleocene interval has been divided into two units: the Puponga and Farewell formations. On seismic, the boundary between these units is represented by a prominent seismic marker (“Near Top Puponga” seismic marker) that can be mapped over a large part of the Kerry 3D seismic survey area (Alotaby 2015; Kozak 2018).

3 Material and method
The Kerry 3D marine dataset was acquired by GECO-PRAKLA on board the MV Geco Resolution vessel. Reprocessing of the KS96 Kerry 3D marine seismic volume performed in 1996. The approximate survey and processing volume is 410 km2. The processing is for the period March 2004 to November 2004 and is registered under CGG’s (Compagnie Générale de Géophysique). Processing was carried out according to a sequenced framework agreed upon between Origin Energy and CGG. Extensive testing was performed for each processing step, with results documented and presented in the form of technical notes. Origin Energy reviewed and approved all test parameters before production. The processing was done with a processing record length of 5000 ms, a processing sample rate of 2 ms that was resampled to 4 ms, and a grid size of 12.5 m × 25 m.
3.1 Workflow
In this study’s workflow, data conditioning, estimation, and collection of seismic attributes, as well as UVQ calculations, were used (Fig. 3). The study’s methodology included the examination of data conditioning, analysis, and selection of appropriate seismic attributes, automatic fault extraction, and the UVQ-NN process. The data were prepared in the first phase, which included data conditioning. The data conditioning involved geostatistical and geometrical filters to improve and polish the seismic data's structural features. In the second stage of the selection process, several geometrical attributes were evaluated and tested. The seismic attributes that extracted the best results from discontinuities were prioritized. After that, the TFL is inserted as input to compute the VCF and generate the fault patches automatically. The final phase involved testing and training the prioritized seismic attributes for neural network analysis.

The detailed workflow chart shows the building of the SSF model through three main steps: data conditioning, optimum seismic attribute selection and extraction, VCF, automatic fault extraction, and finally, UVQ analysis
3.2 Seismic conditioning
Noise disturbances can distort the visibility of geologic features and faults in the seismic data. Additionally, this causes the quality of the data to decrease, making it extremely challenging to precisely map features (Alves et al. 2015). Hence, to address these challenges, improve signal quality, and decrease undesirable (noisy) signals, the data should be effectively conditioned. To effectively eliminate undesired noise from the 3D seismic volume, we have employed median and diffusion filters in a systematic manner (Höcker and Fehmers 2002). First, the 3D seismic data was examined for noise and distortions that might not have been eliminated (or may have been added) during the processing process, such as acquisition footprints and processing artifacts. In order to exclude these later distortions from the 3D seismic dataset, a semi-automated geostatistical filtration was used (Magneron and Petit 2008; Piazza et al. 2015).
A dip-steering (DS) volume was then calculated as the next stage of the data conditioning process. First, we build the DS seismic volume by getting the dip and azimuth parameters along the events we want to find (Tingdahl and de Rooij 2005). This procedure produced two separate steering cubes: (1) the detailed steering cube, which stores small seismic signal variations in the 3D volume (filter step-out in the present work: crossline/inline/sample: 1/1/3); and (2) the extracted 3D background steering volume, which stores the overall pattern of all these variations (filter step-out in the present work: crossline/inline/sample: 5/5/5) in order to follow the target of data conditioning (Kumar 2016). Moreover, the background steering (BS) volume is provided through the conditioning of seismic data.
The FFT of the BS volume was used to create a steering cube after a geostatistical filter was applied initially. Utilizing the dip and azimuth measurements, the DS volume was constructed (Tingdahl and de Rooij 2005). Multiple filters were included in the BS volume. After that, the BS volume was used to examine faults that are linked with the dip. The seismic volume’s stratigraphic and structural data were therefore extracted using FFT. Each seismic window sample was bordered by a cube of 3 × 3 × 3 samples, within which the dip was calculated.
The DSMF was employed in order to reduce noise and enhance the azimuth and dip data of the DS volume that was created. The flattening effect on the faults was then eliminated by applying a diffusion filter to the DSMF. The surrounding faults in the noisy seismic data were improved by the DSDF. To create an FEF, both DSMF and DSDF were combined. The results were adjusted to the DSMF apart from irregularities and sharpened DSDF at SSFs locations, and a predefined level of similarity was used to compute the FEF. The FEF improved the visualization of the SSFs, minimized the noise, and improved reflector smoothness.
At inline 653, the output gives a comparison between the original seismic data (Fig. 4a), DSMF output (Fig. 4b), DSDF output (Fig. 4c), and FEF output (Fig. 4d). Based on the displayed data conditioning and quality enhancement output, the FEF achieved a remarkable performance in identifying the SSF faults that were denoted by the black arrows.

Seismic sections at inline 653 from the 3D seismic volume: a the original seismic section; b DSMF output; c DSDF output; and d FEF output. The black arrows mark the major faults by showing the effect of each filter in the discontinuity detection. The FEF shows signal-to-noise enhancement, improvement of the reflectors’ lateral continuities, and clear visualization of discontinuities
3.3 Seismic attributes
The subsurface’s heterogeneity frequently makes it challenging to represent a desired geological feature, such as SSF and fractures, most practically. Whenever seismic discontinuities are detected using several attributes and the appropriate filters, they may indeed be described more precisely (De Groot et al. 2001; Kuznetsov et al. 2016, 2017; Naseer 2020, 2021a, 2021b; Tayyab et al. 2017; Ismail et al. 2020, 2021; Gammaldi et al. 2022; Nasser 2023). Throughout this study, various complex and geometrical attributes were tested after extraction. The similarity, polar dip, and maximum curvature attributes combined with the FEF, DSMF, DSDF, VCF, and TFL were the most helpful in defining the structural configuration of the 3D seismic volume.
Evaluating various attribute values and employing multiple attributes may yield the best results. The optimal attributes gather valuable information and are combined into one optimized fault volume. Coherent noise was attenuated using the DSMF, and discontinuities were then detected and improved via seismic TFL attribute extraction.
To determine the greatest variety of structural changes, geometrical attributes were used. Initially, we choose the attributes that provided the most detail on structural discontinuities. This part includes a summary of the geometric attributes that were selected. A significant amount of effort has been invested in developing geometrical attributes for seismic object visualization and identification (Gersztenkorn et al. 1999; Tingdahl et al. 2001; Tingdahl 2003). Geometrical attributes are best determined by finding the direction of maximum similarity at each point. Dip can find the best similarities between every two traces. Similarity may be calculated using hyperspace distance and the trace samples as vectors. By integrating similarities and other attributes, users may potentially get better results in a short time. Consider trace segments as hyperspace vectors.
3.3.1 Similarity attribute
The coherence attribute is an advanced method that is widely utilized in the process of defining seismic discontinuities. It might be challenging to extract the coherence characteristic in an efficient manner from field data (Lou et al. 2021). Different coherence algorithms can distinguish between all different types of discontinuities and have found widespread use in the process of extracting geological faults (Lou et al. 2019; Li et al. 2021). We utilized the similarity attribute, a class of coherence attributes that represents the degree to which two or more trace segment appearances are similar (De Rooij and Tingdahl 2002; Tingdahl and De Rooij 2005; Ismail et al. 2021). The concept of similarity originated in elementary mathematical concepts: the points on the trace are interpreted as the distinct elements of a vector, and the similarity itself is considered in terms of the distance between points in hyperspace. The similarity attribute describes how closely two or even more trace segments match each other where it belongs to a sort of “coherency” attribute. A similarity ranged from 0 to 1, where a similarity of 1 represents perfect waveform matching between the trace segments, whereas a similarity of 0 represents total dissimilarity. According to this attribute, small faults may be more clearly detected. The major faults and SSFs that were not visible in the seismic volume (Fig. 5a) are clearly identifiable in Fig. 5b, which displays the similarity attribute at time slice 1500 ms. Moreover, the similarity attribute was extracted from the FEF seismic cube to evaluate the effect of the FEF on the SSFs and discontinuities in the seismic volume in Fig. 6.

a The original amplitude seismic time slice at 1500 ms; b after extracting the similarity attribute, which shows that low similarity values near zero represent faults, discontinuities, and fracture zones (marked by white arrows)

The extracted similarity attribute from the FEF seismic volume: a the original 3D seismic volume; b seismic time slice at 1500 ms. a and b show enhancement of the SSFs' detection, where low similarity values near zero represent faults, discontinuities, and fracture zones (marked by white arrows)
3.3.2 Curvature attribute
A surface’s curvature in a particular position is described as having curvature. It may be described as the reversal radius of the osculating circle at a certain position on a curvature in two dimensions (Roberts 2001). Using characteristics of curvature to detect the extent of faults and fractures (Roberts 2001; Chopra and Marfurt 2007). Generally, curvature absolute values show the faults’ and fractures’ intensity (Samson and Mallet 1997; Sigismondi and Soldo 2003). The extensions of the faults that were not identified in the original seismic volume (Fig. 7a) are readily identifiable in Fig. 7b, which displays the maximum curvature attribute at a time slice of 1500 ms.

a The original amplitude seismic time slice of 1500 ms; and b after extraction of the maximum curvature attribute, which shows the high curvature values represent faults, discontinuities, and fracture zones
3.3.3 Polar dip attribute
The horizontally calculated polar dip (true dip) was calculated, with a range that was always positive. The faults of the study area, indicated by a white arrow, were distinguished by the polar-dip attribute on the time slice at 1500 ms (Fig. 8b). In terms of detecting faults and discontinuities, the polar dip outperformed most other dip attributes (Ashraf et al. 2020).

a The original amplitude seismic time slice of 1500 ms; and b after computing the polar-dip attribute, which shows the extensions of the faults and fracture zones (marked by white arrows)
3.3.4 Thinned fault likelihood (TFL)
The sample location fault probability is indicated by the FL and TFL attributes. 3D structure-oriented semblance volume scanning is fault probability (FL), where mathematically, FL resembles semblance. To improve fault likelihood, it searches for semblance in numerous fault orientations. The fault plane has the lowest semblance and highest probability (maximum FL). The scanning ends with visualizations of maximal fault probability (FL) and fault strikes and dips (Hale 2012; Ashraf et al. 2020; Imran et al. 2021). The TFL attribute was created with razor-sharp faults for further fine-tuning. This automated technique uses Hale’s fault-oriented semblance algorithms to clearly indicate fault planes. The derived attributes demonstrate a detailed structural framework. It contributed to the seismic fault modeling and recorded various minor features that were challenging to recognize in the original seismic volume. Figure 9 shows the computed TFL attribute from the DSMF seismic volume.

The computed TFL from the FL volume shows all the razor-sharp discontinuities across the seismic volume, which include the major faults, SSFs, and fractures. White pointers indicate 6 faults of large-scale faults
3.3.5 Fracture density
This attribute refers to the volume of faults and fractures that might indeed be detected within a user-defined radius for scanning and calculating the number of fractures within the given radius. In this instance, this attribute demonstrated an improvement in the visibility of possible fracture zones. The FEF was utilized to generate the fracture density volume. The fracture network zones are shown in Fig. 10b, where the highest fracture zones appear in black.

a The original amplitude seismic data; and b after computing the fracture density attribute, which shows where the highest fracture zones appear in black
3.4 Artificial neural networks
ANN methodologies have been effectively used throughout recent years in seismic data analysis and petroleum exploration (Rebai et al. 2019; Shalaby et al. 2019; Farfour and Mesbah 2020; Yang and Sun 2020; Ismail et al. 2022). NN processing (Sheng et al. 2019; Ashraf et al. 2020) can be used to get detailed results by using several seismic attributes to analyze a huge dataset efficiently and precisely. This improves the extraction and understanding of various features obtained from seismic data. In general, ANN algorithms operate as a multi-channel computational unit, with a number of processors with defined inputs and entirely optional defined outputs for SSFs and fracture detections.
3.4.1 Unsupervised neural network
The UVQ works in the same way as the K-means clustering algorithms by organizing data in groups with similar structures in different clusters and then defining all targets (clusters). UVQ-NN is a computer-based neural network model that works in a sequence of parallel layers where each one receives a number of nodes interconnected with different weights based on the contribution of each node to the network. The input weight values are critical parameters in the error and misclassification calculations through iteration and output extraction. The UVQ-NN trains through a non-linear filtering process. The filtering process includes the initialization and evaluation of the input nodes (6 nodes) which consist of meta-seismic attributes tested and chosen from tens of attributes, these attributes classes are associated with the abrupt change in the amplitude of the faults, discontinuities, reflection terminations, and the dip variation where each of them works to improve the faults visualization and auto-detection. Subsequently, each neuron inside the hidden layer, consisting of three nodes, establishes connections with the neurons residing in the following layer. The synaptic connections between neurons are referred to as weights, which undergo updates during the learning phase. After that, the iteration process is performed to compute the UVQ-NN average matching. To follow the UVQ-NN performance through the iteration process, the average match of the input nodes (clusters) is tracked along the process which increases in a step-function by finding a new cluster in each step. The size of the dataset used, the software, and the parameter settings for the UVQ-NN model are shown in Table 1.
The UVQ-NN is trained using a back-propagation NN by the following equations:
where A is the input sample vector, \(x\): weighting function, w: weighting vector, n: number of input vectors, P: output.
Unsupervised NN classifies the input information into various classes depending on their attributes. It operates as a self-organized network. In 3D space, the UVQ strategy is typically focused on identifying and categorizing the data from inserted input samples into clusters. UVQ analysis is crucial in petroleum exploration and structural analysis in developing concessions because it allows the seismic volume to be restructured and divided into various classes, each with unique features or parameters, entirely depending on the details obtained from the 3D seismic volume and without the need for supplementary information collected from logs or cores (Saggaf et al. 2003; Ismail et al. 2022). Meta-attributes, such as the TFL, FEF on similarity, fracture density, steered similarity, polar dip, and maximum curvature attributes, are considered to visualize and allow discrimination of the faults and fracture zones that are distinguished by extremely low amplitudes from seismic volume. Before selecting the optimal attributes package to serve as input for the UVQ network procedure to image SSFs and fractured zones, each of these attributes is put through a set of tests.
The UVQ analysis organizes the input vectors defined by the tested and chosen attributes package and identifies cluster centers in the seismic volume that provides various colors for various classes (faults and fractures in class 1 and seismic reflectors without discontinuities in class 2) (Fig. 11). The average matching between both the selected and tested meta-seismic attributes package and the number of training vectors demonstrates how the output vector has a high matching percentage of around 89% (Fig. 12). Table 2 shows training attribute weights.

The UVQ-NN with the input layer contains six nodes, the hidden layer has three nodes, and the output layer has one node. The colored legend shows the weight and contribution of every single attribute

The average matching percentage shows increasing match rates, which reached 89% after 410,000 training vectors
4 Results
At inline 653, data conditioning and quality enhancement generate three outputs represented by the (Fig. 4b), DSDF output (Fig. 4c), and FEF output (Fig. 4d) where the FEF contributed effectively to identify the SSF highlighted by the black arrows. The similarity attribute is generated to extract small faults that may be more clearly identifiable in Fig. 5b, which displays the similarity attribute at a time slice of 1500 ms. In addition, the similarity attribute was derived from the FEF seismic cube to assess the effect of the FEF on the SSFs and discontinuities in Fig. 6. Another geometrical attribute that assists to detect the extensions of the faults that were not identified in the original seismic volume is the curvature attribute (Fig. 7b), which displays the maximum curvature attribute at a time slice of 1500 ms. Moreover, the polar dip, TFL, and fracture density attribute results allow discrimination of the faults and fracture zones that are distinguished by extremely low amplitudes from seismic volume (Figs. 8, 9, and 10).
3D matching and segmentation volumes yield the best UVQ-NN results (Fig. 13). The segment and corresponding 3D seismic volumes (Fig. 13a) match major faults, SSFs, and fracture zones at an average of 89% matching. The 3D segment volume uses two-color classes to segment clearly (Fig. 13b). Class 1 shows major faults, SSFs, and fracture zones in black, whereas class 2 shows no faulted or fractured zones. 3D segment and match volumes produce effective segmentation and matching images. A new volume was computed and ranked based on discontinuity body size, and the VCF was utilized to provide the outputs of the connected fracture bodies, as illustrated in Fig. 14. After that, a completely automated fault extraction approach was applied to the TFL volume for fault auto-tracking and fault patching. Figure 15a demonstrates that both major and SSF patches were detected, whereas Fig. 15b shows just the filtering and extraction of the SSF patches, which are more obvious in the deeper part of the model.

a The matching 3D volume distinguishes the background (zones that are neither faulted nor fractured) from the main faults, SSFs, and fracture zones. b The 3D segment volume shows a clear and exact segmentation, where class 1 shows major faults, SSFs, and fracture zones in black and class 2 shows areas that are not faulted or fractured

The VCF derived from the TFL depicts all major and SSF faults as well as minor discontinuities. The white elliptical shape shows a high fracture zone, while the major faults are marked with white arrows

a A 3D visualization of all major faults and SSFs’ surfaces. b The 3D view shows the surfaces of filtered SSFs
The fracture bodies were primarily oriented northeast-southwest, and major fault patches were generated in the seismic volume’s shallower zone, while SSF bodies were discovered at greater depth. The Rose diagrams (Fig. 16a, b) depict all TFL samples over a threshold. The Stereonet showed around 350 fault patches in various orientations from the calculated faults (Fig. 16c). The results demonstrated that the majority of patches were concentrated in the northeast-southwest direction.

Rose diagrams (dip) in (a) and (strike) in (b), respectively. c Stereonet automatically displays the orientation, dip, and azimuth of all major faults and SSFs surfaces
5 Discussion
The recording and processing of seismic data could create noise in the data. Extracting structural-based attributes before data conditioning may generate geometrical errors linked to disconformities and faults. Conditioning seismic data is a solution for reducing noise and enhancing the smoothness of reflectors, geobodies, features, and fault sharpness. The data conditioning procedure is able to enhance the quality of the real signal generated by the presence of stratigraphic and structural feature variations. Therefore, the primary purpose is to increase the signal-to-noise ratio while keeping important features such as main faults, SSFs, and amplitude variation linked to different other geological features.
Therefore, significant seismic volume enhancements can be achieved by designing effective filters such as DSMF, DSDF, and FEF (Fig. 4) that enhance different types of faults before using the generated output cube as input to extract various geometrical attributes.
Understanding the structural framework of the subsurface is essential for constructing an accurate and reliable geological model. This has typically been performed by manually identifying the faults detected on the 3D seismic cube. This is extremely significant for low-quality seismic volume. Using advanced methods helps the interpreter identify all discontinuities in the 3D seismic cube. The interpreter can construct a preliminary fault network from a 3D seismic volume using automatic fault segmentation with very minimal operator interaction. The detected faults can be efficiently adjusted afterward in a considerably shorter period.
Automated fault recognition and extraction developments have increased dramatically during the previous two decades. Several seismic attributes, like similarity, TFL, polar dip, fracture density, and curvature attributes, have been developed and used to find fault positions and extensions (Figs. 5, 6, 7, 8, 9, and 10).
Unsupervised learning includes several major learning algorithms such as clustering algorithms (K-means, DBBSCAN, agglomerative, mean shift, and fuzzy c-means), associate rule learning algorithms (Fb growth, euclat, apriori), and dimensionality reduction algorithms (t-SNE, PCA, LSA, SVD, and LDA). All these algorithms have the advantage of working without direct supervision, but the disadvantage is that the accuracy of the final output model depends on the quality of the original dataset and the weight values of the attributes inserted into the input layer. Therefore, if the dataset contains a high noise ratio or the inserted attributes are not tested, the final output model will have a high error percentage. Therefore, the UVQ-NN is chosen because it is considered one of the simplest algorithms for computing the optimal centroids of all clusters using optimal and tested attributes, which helps discriminate between fault and non-fault zones in the output model.
The present method does not include displacement analysis and maybe this is one of the limitations of the present work but the selected meta-attributes, such as the TFL, FEF on similarity, fracture density, steered similarity, polar dip, and maximum curvature attributes gather valuable information and are combined into one optimized fault volume and considered to visualize and allow discrimination of the faults, cross-faults, and fracture zones.
5.1 UVQ models
Prototype vectors are updated until they fall in cluster centers. Cluster centers are sorted in the training and iteration processes of the input nodes (seismic attributes). The output layer of the network extracts two 3D volumes (outputs), the first shows the winning clusters of the network target (segmentation) and the second output is the match (confidence), which is a matching value between 0 and 1 computing and displaying how the input vector is close to the winning cluster vectors. Generally, the step function boosts the average match. Every step represents the identification of an additional cluster by the network. Once the average match (confidence) has attained an acceptable level of stability, training can end.
The 3D matching volume indicates the confidence level between the input data (multi-attributes) on a scale ranging from 0 to 1, where 0 means vectors that become dissimilar and 1 means similar (winning) vectors. The optimal and most acceptable scale range is 0.5–1 (Fig. 13a). The matching process effectively produces a new 3D volume that distinguishes the background (zones that are neither faulted nor fractured) from the main faults, SSFs, and fracture zones. The 3D segment volume categorizes seismic events linked to derived attributes into two classes with different colors (Fig. 13b).
The highest quality result of the UVQ-NN is given by 3D matching and segmentation volumes (Fig. 13). These two new 3D seismic volumes are the segment and matching 3D seismic volumes, whereas the 3D matching volume (Fig. 13a) identifies the major faults, SSFs, and fracture zones with an average of 89% matching. The 3D segment volume displays a clear and exact segmentation utilizing basically two-color classes (Fig. 13b). Class 1 depicts major faults, SSFs, and fracture zones in black, whereas class 2 represents zones that are not faulted or fractured. In the presentation of the main faults, SSFs, and fracture zones, both 3D segment and match volumes produce segmentation and matching images.
5.2 Automatic fault and fracture network extraction
However, the attribute values can be affected by seismic signal inhomogeneities near the faults (Fehmers and Hocker 2003; Philit et al. 2019; Ashraf et al. 2020). This makes it hard to see where the faults are. For the aforementioned reasons, the VCF, supported by geometrical attributes and filters, is utilized to generate a 3D structural model that displays SSFs and key faults with a color bar that ranks these faults depending on size. The resulting TFL volume (Fig. 9) was used as input for the VCF to estimate the fracture zones.
The VCF was performed employing the envelope of amplitudes greater than 0.6 which is redefined to generate the fracture bodies. Propagation was accomplished in all directions (26) by making use of all volume sides and corners. The extracted volume was computed and ranked based on discontinuity body size, and the VCF was used to present the outputs of the linked fracture bodies that were created, as shown in Fig. 14.
After choosing the appropriate parameters, a fully automated fault extraction technique was performed on the TFL volume for fault auto-tracking to create fault patches. Figure 15a shows that both major and SSF patches were found, while Fig. 15b shows only the filtration and extraction of the SSF patches, which are more visible in the deeper part of the model.
The SSFs and fracture patch orientations were shown in the results. The fracture bodies were primarily oriented northeast-southwest, and major fault patches were generated in the seismic volume's shallower zone, while SSF bodies were discovered at greater depth.
After the fault surfaces have been automatically produced, we extracted both stereonet and Rose diagrams (dip and strike) (Fig. 16); the Rose diagrams (Fig. 16a, b) gather and display all TFL samples over a predetermined threshold. On the Stereonet, the outputs of the derived faults were demonstrated (Fig. 16c), and they revealed more than 350 fault patches dispersed in a variety of orientations. The results demonstrated that the majority of patches were concentrated in the northeast-southwest direction.
The rose diagram (Figs. 16a, b) and final UVQ-N, VCF, and automated fault extraction from the TFL models (Figs. 13, 14, 15, and 16) show high matching for most of the fault trends and orientation with recent studies derived by using conventional interpretation and modeling in the Taranaki basin (Haque et al. 2016; Kenyon 2016; Qadri et al. 2017; Thota et al. 2021) and compatible with the tectonic stress pattern (Rajabi et al. 2016).
In summary, this work developed an innovative methodology that detected and automatically extracted both SSFs and larger faults. It is fast and may be accomplished in a relatively short amount of time compared to manual interpretation.
6 Conclusion
This study introduces an improved workflow for automating the recognition and extraction of large-scale faults, FFSs, and fracture network zones in a 3D seismic volume. It is based on both UVQ-NN and automatic fault extraction combined with geometrical and unconventional attributes that deal with 3D fault-oriented semblance and therefore able to recognize SSFs and fracture networks even when reflectors are relatively uninterrupted through fracture networks and faults. Its application to reservoirs with various faults extracted the major and minor faults. Providing precise structural modeling, the outputs are encouraging and could play a significant role in prospect discovery. Combined with both the dip and azimuth considerations, this new workflow innovation shows high accuracy and effectiveness in evaluating and developing mature reservoirs. The ANN–UVQ and automated fault extraction analyses indicated a fault with a minimal heave and throw orientation (NNE–SSW). The strategies utilized in the work for the modeling of major faults, SSFs, and fracture networks are automated, adaptable, time and cost-efficient, accurate, and innovative. The implemented approach is innovative and can be employed in the future for the identification, extraction, and classification of different-scale discontinuities in any region of the world.
Availability of data and materials
The data generated in the present study are available from the corresponding author upon reasonable request.
References
Abdelmaksoud A, Radwan AA (2022) Integrating 3D seismic interpretation, well log analysis and static modelling for characterizing the Late Miocene reservoir, Ngatoro area, New Zealand. Geomech Geophys Geo-Energy Geo-Resour 8(2):1–31. https://doi.org/10.1007/s40948-022-00364-8
Ainsworth B, Van der Pal R (2004) Pohokura full field reservoir modelling (cycle 3) part 1: static modelling. Ministry of Economic Development New Zealand Unpublished Openfile Petroleum Report PR (pp 2982)
Alotaby WD (2015) Fault interpretation and reservoir characterization of the farewell formation within Kerry field, Taranaki Basin, New Zealand. Missouri University of Science and Technology, Missouri
Alves TM, Omosanya KD, Gowling P (2015) Volume rendering of enigmatic high-amplitude anomalies in southeast Brazil: a workflow to distinguish lithologic features from fluid accumulations. Interpretation 3(2):A1–A4
Alzubaidi F, Mostaghimi P, Swietojanski P, Clark SR, Armstrong RT (2021) Automated lithology classification from drill core images using convolutional neural networks. J Petrol Sci Eng 197:107933
Ameen MS, Hailwood EA (2008) A new technology for the characterization of microfractured reservoirs (test case: Unayzah reservoir, Wudayhi field, Saudi Arabia). AAPG Bull 92(1):31–52
Ashraf U, Zhang H, Anees A, Nasir Mangi H, Ali M, Ullah Z, Zhang X (2020) Application of unconventional seismic attributes and unsupervised machine learning for the identification of fault and fracture network. Appl Sci 10(11):3864
Basir HM, Javaherian A, Yaraki MT (2013) Multi-attribute ant-tracking and neural network for fault detection: a case study of an Iranian oilfield. J Geophys Eng 10(1):015009
Boro H, Rosero E, Bertotti G (2014) Fracture-network analysis of the Latemar Platform (northern Italy): integrating outcrop studies to constrain the hydraulic properties of fractures in reservoir models. Pet Geosci 20(1):79–92
Bressan TS, de Souza MK, Girelli TJ, Junior FC (2020) Evaluation of machine learning methods for lithology classification using geophysical data. Comput Geosci 139:104475
Bull S, Nicol A, Strogen D, Kroeger KF, Seebeck HS (2019) Tectonic controls on Miocene sedimentation in the Southern Taranaki Basin and implications for New Zealand plate boundary deformation. Basin Res 31(2):253–273
Bulte G (1989) Styles of compressional wrench faulting Taranaki basin, New Zealand
Camanni G, Childs C, Delogkos E, Roche V, Manzocchi T, Walsh J (2023) The role of antithetic faults in transferring displacement across contractional relay zones on normal faults. J Struct Geol 168:104827
Chopra S, Marfurt KJ (2007) Volumetric curvature attributes for fault/fracture characterization. First Break 25(7)
Clausen OR, Korstgåd JA (1993) Small-scale faulting as an indicator of deformation mechanism in the Tertiary sediments of the northern Danish Central Trough. J Struct Geol 15(11):1343–1357
De Groot PF, Ligtenberg HE, Meldahl PA, Heggland RO (2001) Selecting and combining attributes to enhance detection of seismic objects. In: 63rd EAGE conference & exhibition (pp cp-15). European Association of Geoscientists & Engineers, Egypt
De Rooij M, Tingdahl K (2002) Meta-attributes—the key to multivolume, multiattribute interpretation. Lead Edge 21(10):1050–1053
Di H, Shafiq M, AlRegib G (2018) Patch-level MLP classification for improved fault detection. In: SEG Technical Program Expanded Abstracts (pp 2211–2215). Society of Exploration Geophysicists.
Eid R, El-Anbaawy M, El-Tehiwy A (2023) Gas channel delineation utilizing a neural network and 3D seismic attributes: Simian field, offshore Nile delta, Egypt. J Afr Earth Sci: 104973
El Dally NH, Metwalli FI, Ismail A (2023) Seismic modelling of the Upper Cretaceous, Khalda oil field, Shushan Basin, Western Desert, Egypt. Model Earth Syst Environ: 1–8.
Elmahdy M, Radwan AA, Nabawy BS, Abdelmaksoud A, Nastavkin AV (2023) Integrated geophysical, petrophysical and petrographical characterization of the carbonate and clastic reservoirs of the Waihapa Field, Taranaki Basin. New Zealand. Marine Petrol Geol 151:106173
Farfour M, Mesbah M (2020) Machine intelligence vs. human intelligence in geological interpretation of seismic data. In: 2020 International Conference on Decision Aid Sciences and Application (DASA) (pp 996–999). IEEE.
Fehmers GC, Höcker CF (2003) Fast structural interpretation with structure-oriented filtering. Geophysics 68(4):1286–1293
Forder SP, Sissons BA (1992) The Moki C sands: an example of Mio-Pliocene bathyal fans in the North Taranaki Graben. In: 1991 New Zealand oil exploration conference proceedings. Wellington, Ministry of Commerce (pp 155–167).
Gammaldi S, Ismail A, Zollo A (2022) Fluid accumulation zone by Seismic attributes and amplitude versus offset analysis at Solfatara Volcano, Campi Flegrei, Italy. Front Earth Sci: 768.
Gersztenkorn A, Marfurt KJ (1999) Eigenstructure-based coherence computations as an aid to 3-D structural and stratigraphic mapping. Geophysics 64(5):1468–1479
Ghisetti FC, Johnston MR, Wopereis P (2020) Structural evolution of the active Waimea-Flaxmore fault system in the Nelson-Richmond urban area, South Island, New Zealand. New Zealand J Geol Geophys 63(2):168–189
Guo B, Li L, Luo Y (2018) A new method for automatic seismic fault detection using convolutional neural network. In: 2018 SEG international exposition and annual meeting. OnePetro, Richardson
Hale D (2012) Fault surfaces and fault throws from 3D seismic images. In: 2012 SEG annual meeting. OnePetro, Richardson
Hale D (2013) Methods to compute fault images, extract fault surfaces, and estimate fault throws from 3D seismic images. Geophysics 78(2):O33–O43
Haque AE, Islam MA, Shalaby MR (2016) Structural modeling of the Maui gas field, Taranaki basin, New Zealand. Petrol Explor Dev 43(6):965–975
Higgs KE, King PR, Raine JI, Sykes R, Browne GH, Crouch EM, Baur JR (2012) Sequence stratigraphy and controls on reservoir sandstone distribution in an Eocene marginal marine-coastal plain fairway, Taranaki Basin, New Zealand. Mar Petrol Geol 32(1):110–137
Höcker C, Fehmers G (2002) Fast structural interpretation with structure-oriented filtering. Geophysics 68(4):1286–1293
Hou M, Xiao Y, Lei Z, Yang Z, Lou Y, Liu Y (2023) Machine learning algorithms for Lithofacies classification of the Gulong Shale from the Songliao Basin, China. Energies 16(6):2581
Imran QS, Siddiqui NA, Latiff AH, Bashir Y, Khan M, Qureshi K, Al-Masgari AA, Ahmed N, Jamil M (2021) Automated fault detection and extraction under gas chimneys using hybrid discontinuity attributes. Appl Sci 11(16):7218
Ismail A, Ewida HF, Al-Ibiary MG, Gammaldi S, Zollo A (2020) Identification of gas zones and chimneys using seismic attributes analysis at the Scarab field, offshore, Nile Delta, Egypt. Petrol Res 5(1):59–69
Ismail A, Ewida HF, Al-Ibiary MG, Nazeri S, Salama NS, Gammaldi S, Zollo A (2021) The detection of deep seafloor pockmarks, gas chimneys, and associated features with seafloor seeps using seismic attributes in the West offshore Nile Delta, Egypt. Explor Geophys 52(4):388–408
Ismail A, Ewida HF, Nazeri S, Al-Ibiary MG, Zollo A (2022) Gas channels and chimneys prediction using artificial neural networks and multi-seismic attributes, offshore West Nile Delta, Egypt. J Petrol Sci Eng 208:109349
Jia C (2013) Characteristics of Chinese petroleum geology: geological features and exploration cases of stratigraphic, foreland and deep formation traps. Springer Science & Business Media, Berlin
Kadlec BJ, Dorn GA, Tufo HM, Yuen DA (2008) Interactive 3-D computation of fault surfaces using level sets. Vis Geosci 13(1):133–138
Kamp PJ, Vonk AJ, Bland KJ, Hansen RJ, Hendy AJ, McIntyre AP, Ngatai M, Cartwright SJ, Hayton S, Nelson CS (2004) Neogene stratigraphic architecture and tectonic evolution of Wanganui, King Country, and eastern Taranaki Basins, New Zealand. NZ J Geol Geophys 47(4):625–644
Kenyon IC (2016) 4D evolution and inverted fault architecture of the Taranki Basin, Offshore New Zealand. Independent project report submitted for the degree of Master of Science in Petroleum Geoscience, Royal Holloway University of London
King PR (2000) Tectonic reconstructions of New Zealand: 40 Ma to the present. NZ J Geol Geophys 43:611–638
King PR, Thrasher GP (1996) Cretaceous-Cenozoic geology and petroleum systems of the Taranaki Basin, New Zealand. Institute of Geological & Nuclear Sciences, Lower Hutt, p 244
Knox GJ (1982) Taranaki Basin, structural style and tectonic setting. NZ J Geol Geophys 25(2):125–140
Kozak S (2018) Comparison of fracture detection methods applied on the Kerry 3D seismic, Taranaki Basin, New Zealand. Doctoral dissertation, University of Leoben
Kumar PC (2016) Application of geometric attributes for interpreting faults from seismic data: an example from Taranaki basin. In; New Zealand: 86th annual international meeting, SEG, expanded abstracts (pp 2077–2081).
Kuznetsov OL, Gaynanov VG, Radwan AA, Chirkin IA, Rizanov EG, Koligaev SO (2017) Application of scattered and emitted seismic waves for improving the efficiency of exploration and development of hydrocarbon fields. Mosc Univ Geol Bull 72(5):355–360
Kuznetsov OL, Chirkin IA, Radwan AA, Rizanov EG, LeRoy SD, Lyasch YF (2016) Combining seismic waves of different classes to enhance the efficiency of seismic exploration. In: 2016 SEG international exposition and annual meeting. OnePetro, Richardson
Langridge RM, Ries WF, Litchfield NJ, Villamor P, Van Dissen RJ, Barrell DJA, Stirling MW (2016) The New Zealand active faults database. New Zealand J Geol Geophys 59(1):86–96
Leila M, El-Sheikh I, Abdelmaksoud A, Radwan AA (2022) Seismic sequence stratigraphy and depositional evolution of the Cretaceous-Paleogene sedimentary successions in the offshore Taranaki Basin, New Zealand: implications for hydrocarbon exploration. Mar Geophys Res 43(2):1–8. https://doi.org/10.1007/s11001-022-09483-z
Li F, Lyu B, Qi J, Verma S, Zhang B (2021) Seismic coherence for discontinuity interpretation. Surv Geophys: 1–52.
Li S, Liu N, Li F, Gao J, Ding J (2022) Automatic fault delineation in 3-D seismic images with deep learning: data augmentation or ensemble learning? IEEE Trans Geosci Remote Sens 9(60):1–4
Liu N, Wang J, Gao J, Chang S, Lou Y (2022) Similarity-informed self-learning and its application on seismic image denoising. IEEE Trans Geosci Remote Sens 60:1–3
Lou Y, Zhang B, Wang R, Lin T, Cao D (2019) Seismic fault attribute estimation using a local fault model. Geophysics 84(4):O73–O80
Lou Y, Zhang H, Liu N, Liu R, Sun F (2021) Multiscale coherence attribute and its application on seismic discontinuity description. IEEE Geosci Remote Sens Lett 19:1–5
Lou Y, Li S, Liu N, Liu R (2022a) Seismic volumetric dip estimation via a supervised deep learning model by integrating realistic synthetic data sets. J Petrol Sci Eng 1(218):111021
Lou Y, Wu L, Liu L, Yu K, Liu N, Wang Z, Wang W (2022b) Irregularly sampled seismic data interpolation via wavelet-based convolutional block attention deep learning. Artif Intell Geosci 3:192–202
Magneron C, Petit F (2008). New spatial estimation and simulation models for more precision and more realism. In: 70th EAGE conference & exhibition. Rome, Italy
McDougall J, Thrasher GP (1991) Cenozoic tectonics of the southeastern Taranaki Basin. In: Geological society of New Zealand 1991 annual conference: programme and abstracts, vol 59A. Geological Society of New Zealand miscellaneous publication, p 88
Naseer MT (2020) Seismic attributes and reservoir simulation’application to image the shallow-marine reservoirs of Middle-Eocene carbonates, SW Pakistan. J Petrol Sci Eng 195:107711
Naseer MT (2021a) Seismic attributes and quantitative stratigraphic simulation’application for imaging the thin-bedded incised valley stratigraphic traps of Cretaceous sedimentary fairway, Pakistan. Mar Petrol Geol 134:105336
Naseer MT (2021b) Spectral decomposition’application for stratigraphic-based quantitative controls on Lower-Cretaceous deltaic systems, Pakistan: significances for hydrocarbon exploration. Mar Pet Geol 127:104978
Naseer MT (2023) Appraisal of tectonically-influenced lowstand prograding clinoform sedimentary fairways of Early-Cretaceous Sember deltaic sequences, Pakistan using dynamical reservoir simulations: implications for natural gas exploration. Mar Pet Geol 151:106166
Palmer J, Bulte G (1991) Taranaki Basin, New Zealand: Chapter 9
Peace A, McCaffrey K, Imber J, van Hunen J, Hobbs R, Wilson R (2018) The role of pre-existing structures during rifting, continental breakup and transform system development, offshore West Greenland. Basin Res 30(3):373–394
Pham N, Fomel S, Dunlap D (2019) Automatic channel detection using deep learning. Interpretation 7(3):SE43–SE50
Philit S, Pauget F, Lacaze S, Guion C (2019) To boldly go where no interpreter has gone before. GEO ExPro Mag 016:56–58
Piazza JL, Magneron C, Demongin T, Müller NA (2015) M-factorial kriging-an efficient aid to noisy seismic data interpretation. In: Petroleum geostatistics 2015 (pp cp-456). European Association of Geoscientists & Engineers.
Pilaar WF, Wakefield LL (1978) Structural and stratigraphic evolution of the Taranaki basin, offshore North Island, New Zealand. APPEA J 18(1):93–101
Qadri SM, Islam MA, Shalaby MR, Eahsan ul Haque AK (2017) Seismic interpretation and structural modelling of Kupe field, Taranaki Basin, New Zealand. Arab J Geosci 10:1–7.
Radwan AA, Nabawy BS, Abdelmaksoud A, Lashin A (2021) Integrated sedimentological and petrophysical characterization for clastic reservoirs: a case study from New Zealand. J Nat Gas Sci Eng 88:103797
Radwan AA, Nabawy BS, Shihata M, Leila M (2022) Seismic interpretation, reservoir characterization, gas origin and entrapment of the Miocene-Pliocene Mangaa C sandstone, Karewa Gas Field, North Taranaki Basin, New Zealand. Mar Petrol Geol 135:105420
Radwan AA, Nabawy BS (2022) Hydrocarbon prospectivity of the miocene-pliocene clastic reservoirs, Northern Taranaki basin, New Zealand: integration of petrographic and geophysical studies. J Petrol Explor Prod Technol 1–8.
Rajabi M, Ziegler M, Tingay M, Heidbach O, Reynolds S (2016) Contemporary tectonic stress pattern of the Taranaki Basin, New Zealand. J Geophys Res Solid Earth 121(8):6053–6070
Ramu C, Sunkara SL, Ramu R, Sain K (2021) An ANN-based identification of geological features using multi-attributes: a case study from Krishna-Godavari basin, India. Arab J Geosci 14:1
Ramya J, Somasundareswari D, Vijayalakshmi P (2020) Gas chimney and hydrocarbon detection using combined BBO and artificial neural network with hybrid seismic attributes. Soft Comput 24:2341–2354
Rattenbury MS, Cox SC, Edbrooke SW, Martin AP (2016) Integrating airborne geophysical data into new geological maps of New Zealand mineral provinces. Mineral deposits of New Zealand: exploration and research. Carlton: Australasian Institute of Mining and Metallurgy. Monograph series (Australasian Institute of Mining and Metallurgy) 31:37–44
Rebai N, Hadjadj A, Benmounah A, Berrouk AS, Boualleg SM (2019) Prediction of natural gas hydrates formation using a combination of thermodynamic and neural network modeling. J Petrol Sci Eng 182:106270
Riaz MS, Bin S, Naeem S, Kai W, Xie Z, Gilani SM, Ashraf U (2019) Over 100 years of faults interaction, stress accumulation, and creeping implications, on Chaman Fault System, Pakistan. Int J Earth Sci 108(4):1351–1359
Roberts A (2001) Curvature attributes and their application to 3D interpreted horizons. First Break 19(2):85–100. https://doi.org/10.1046/j.0263-5046.2001.00142.x
Roche V, Camanni G, Childs C, Manzocchi T, Walsh J, Conneally J, Saqab MM, Delogkos E (2021) Variability in the three-dimensional geometry of segmented normal fault surfaces. Earth Sci Rev 216:103523
Saggaf MM, Toksöz MN, Marhoon MI (2003) Seismic facies classification and identification by competitive neural networksSeismic Facies Mapping. Geophysics 68(6):1984–1999
Samson P, Mallet JL (1997) Curvature analysis of triangulated surfaces in structural geology. Math Geol 29(3):391–412
Schmidt DS, Robinson PH (1990) The structural setting and depositional history for the Kupe South Field, Taranaki Basin. In: 1989 New Zealand oil exploration conference proceedings. Ministry of Commerce, Wellington-New Zealand (pp 151–172).
Schultz T, Theisel H, Seidel HP (2009) Crease surfaces: from theory to extraction and application to diffusion tensor MRI. IEEE Trans Visual Comput Graphics 16(1):109–119
Shalaby MR, Jumat N, Lai D, Malik O (2019) Integrated TOC prediction and source rock characterization using machine learning, well logs and geochemical analysis: case study from the Jurassic source rocks in Shams Field, NW Desert, Egypt. J Petrol Sci Eng 176:369–380
Sheng C, Wenzhi Z, Xinmin G, Qingcai Z, Qing Y, Shaohua G (2019) Predicting gas content in high-maturity marine shales using artificial intelligence based seismic multiple-attributes analysis: a case study from the lower Silurian Longmaxi Formation, Sichuan Basin, China. Mar Petrol Geol 101:180–194
Sigismondi ME, Soldo JC (2003) Curvature attributes and seismic interpretation: case studies from Argentina basins. Lead Edge 22(11):1122–1126
Stagpoole V, Nicol A (2008) Regional structure and kinematic history of a large subduction back thrust: Taranaki Fault, New Zealand. J Geophys Res: Solid Earth 113(B1).
Strogen DP, Bland KJ, Nicol A, King PR (2014) Paleogeography of the Taranaki Basin region during the latest Eocene-Early Miocene and implications for the ‘total drowning’of Zealandia. NZ J Geol Geophys 57(2):110–127
Strogen DP, Seebeck H, Nicol A, King PR (2017) Two-phase Cretaceous-Paleocene rifting in the Taranaki Basin region, New Zealand; implications for Gondwana break-up. J Geol Soc 174(5):929–946. https://doi.org/10.1144/jgs2016-160
Tayyab MN, Asim S, Siddiqui MM, Naeem M, Solange SH, Babar FK (2017) Seismic attributes’ application to evaluate the Goru clastics of Indus Basin, Pakistan. Arab J Geosci 10(7):1–3
Thota ST, Islam MA, Shalaby MR (2021) A 3D geological model of a structurally complex relationships of sedimentary Facies and Petrophysical Parameters for the late Miocene Mount Messenger Formation in the Kaimiro-Ngatoro field, Taranaki Basin, New Zealand. J Petrol Explor Prod Technol 1–36.
Thrasher GP (1990) The Maui Field and the exploration potential of southern Taranaki; a few unanswered questions. Petrol Explor New Zealand News 25:27–30
Thrasher GP (1991) Subsurface maps of Late Cretaceous stratigraphic sequences, Taranaki Basin. New Zealand, New Zealand Geological Survey
Tingdahl KM, De Rooij M (2005) Semi-automatic detection of faults in 3D seismic data. Geophys Prospect 53(4):533–542
Tingdahl KM, De Groot P, Heggland R, Ligtenberg H (2001) Semi-automated object detection in 3D seismic data. In: Proceedings of the 2001 SEG annual meeting, San Antonio, TX, USA, 9–14 Sep 2001.
Tingdahl KM (2003) Improving seismic chimney detection using directional attributes. In: Developments in petroleum science (vol 51). Elsevier, Amsterdam. pp 157–173
Uruski C, Baillie P, Stagpoole V (2003) Development of the Taranaki Basin and comparisons with the Gippsland Basin: implications for deepwater exploration. APPEA J 43(1):185–196
Van-Ha TD, Thanh-An N. 3D-FaultSeg-UNet: 3D fault segmentation in seismic data using bi-stream U-Net. In: Future data and security engineering. big data, security and privacy, smart city and industry 4.0 applications: 9th international conference, FDSE 2022, Ho Chi Minh City, Vietnam, 23–25 Nov, 2022, Proceedings 2022 Nov 20 (pp 477–488). Singapore: Springer Nature Singapore.
Waldeland AU, Jensen AC, Gelius LJ, Solberg AH (2018) Convolutional neural networks for automated seismic interpretation. Lead Edge 37(7):529–537
Wennberg OP, Casini G, Jonoud S, Peacock DC (2016) The characteristics of open fractures in carbonate reservoirs and their impact on fluid flow: a discussion. Pet Geosci 22:91–104
Wu X, Liang L, Shi Y, Fomel S (2019) FaultSeg3D: Using synthetic data sets to train an end-to-end convolutional neural network for 3D seismic fault segmentation. Geophysics 84(3):IM35–IM45
Yang L, Sun SZ (2020) Seismic horizon tracking using a deep convolutional neural network. J Petrol Sci Eng 187:106709
Yin S, Lv D, Ding W (2018) New method for assessing microfracture stress sensitivity in tight sandstone reservoirs based on acoustic experiments. Int J Geomech 18:04018008
Zeng L (2010) Microfracturing in the Upper Triassic Sichuan Basin tight-gas sandstones: tectonic, overpressure, and diagenetic origins. AAPG Bull 94:1811–1825
Zhang M-L, Bao Y, Zhang S-Q, Liu G-Z (2011) A recognition technology of low order faults and relative application. Sci Technol Eng 11:7790–7901
Zhou R, Yao X, Hu G, Yu F (2021) Learning from unlabelled real seismic data: fault detection based on transfer learning. Geophys Prospect 69(6):1218–1234
Zhou C, Zhou R, Zhan X, Cai H, Yao X, Hu G (2022) Fault surface extraction from a global perspective. Geophysics 87(5):IM189–IM206
Acknowledgements
The Geology Department of Helwan University, Egypt, is grateful to dGB Earth Science for providing an academic license of OpendTect software. The authors thank the New Zealand Petroleum and Minerals and GNS Science (Lower Hutt, New Zealand) New Zealand for supporting this work with the required data, also grateful for their permission to the permission for publishing.
Funding
Not applicable.
Author information
Authors and Affiliations
Contributions
AI conceptualization, wrote the main manuscript text, data conditioning, investigation, editing, formal analysis, and prepared figures. AAR, ML, AA, and MA writing, prepared figures, and data conditioning. All authors reviewed the manuscript.
Corresponding author
Ethics declarations
Ethics approval and consent to participate
Not applicable.
Competing interests
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Ismail, A., Radwan, A.A., Leila, M. et al. Unsupervised machine learning and multi-seismic attributes for fault and fracture network interpretation in the Kerry Field, Taranaki Basin, New Zealand. Geomech. Geophys. Geo-energ. Geo-resour. 9, 122 (2023). https://doi.org/10.1007/s40948-023-00646-9
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40948-023-00646-9