
Model and Data-Driven Combination: A Fault Diagnosis and Localization Method for Unknown Fault Size of Quadrotor UAV Actuator Based on Extended State Observer and Deep Forest


Abstract
:1. Introduction
- 1.
- We have improved the ESO combined with the characteristics of the quadrotor UAV actuator failure. We obtain the angular acceleration containing the fault characteristics of the quadrotor UAV actuator through ESO.
- 2.
- Aiming at the problem of fault location identification of quadrotor UAV actuators, we designed an analysis method of actuator fault residual characteristics. By combining the angular acceleration information of pitch and roll, the method embeds the fault location information of the actuator into the fault data.
- 3.
- Aiming at the problem that the judgment of the fault type and the fault location cannot be obtained at the same time, we designed an actuator fault diagnosis and localization scheme based on ESO-DF. By combining the model-based method and the data-driven method, the scheme fully extracts fault features and achieves high-accuracy fault diagnosis and localization results.
2. Preliminaries
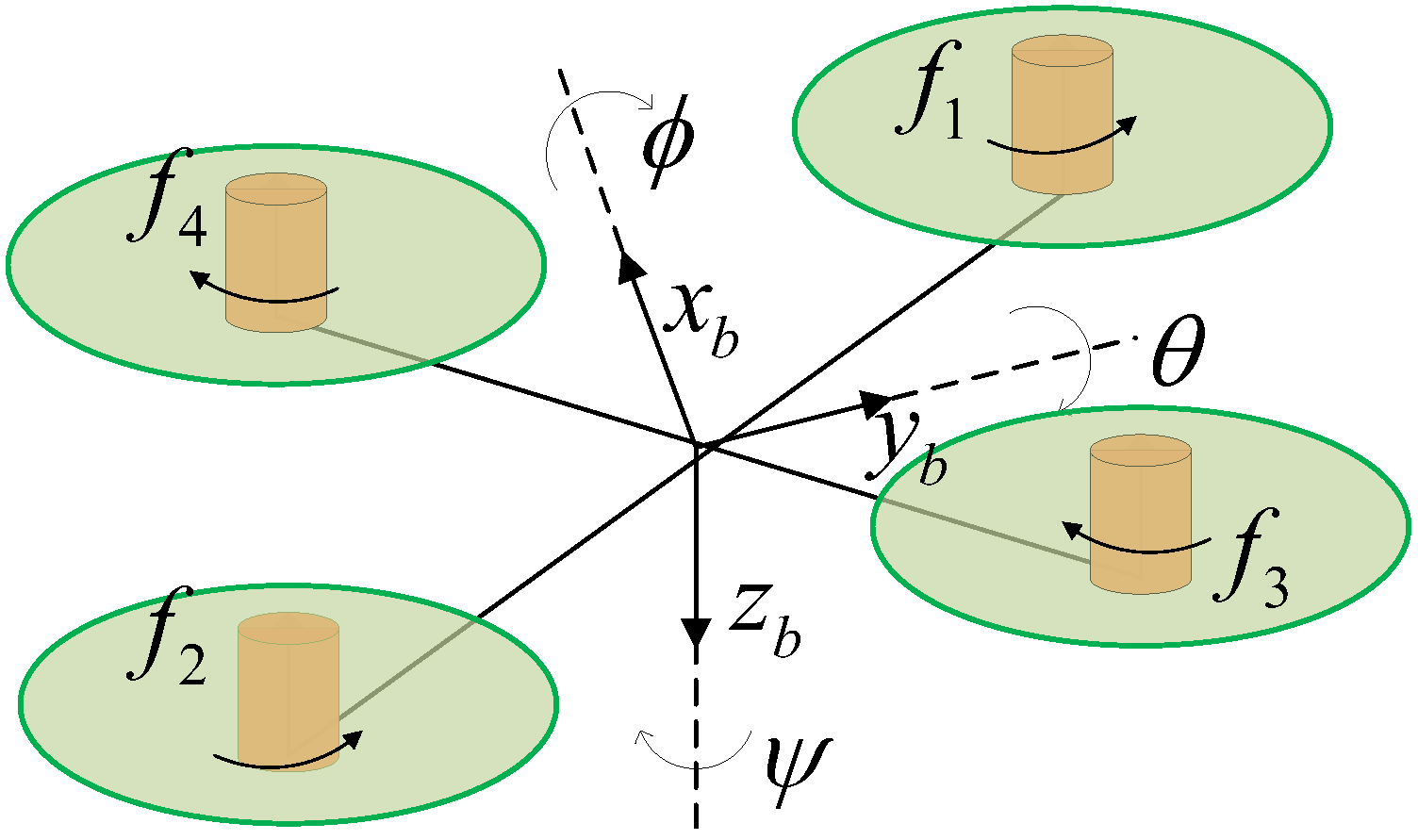
2.1. Mathematical Model of Quadrotor UAV
- The quadrotor UAV is a rigid body.
- The mass of the quadrotor UAV is uniformly distributed and the center of mass overlaps with the geometric center.
- The four actuators of the quadrotor UAV are evenly distributed on the fuselage according to the X shape, as shown in Figure 1.
2.2. Actuator Fault Model
2.2.1. Actuator Speed Constant Deviation Fault
2.2.2. Actuator Speed Gain Loss Fault
2.3. Extended State Observer (ESO)
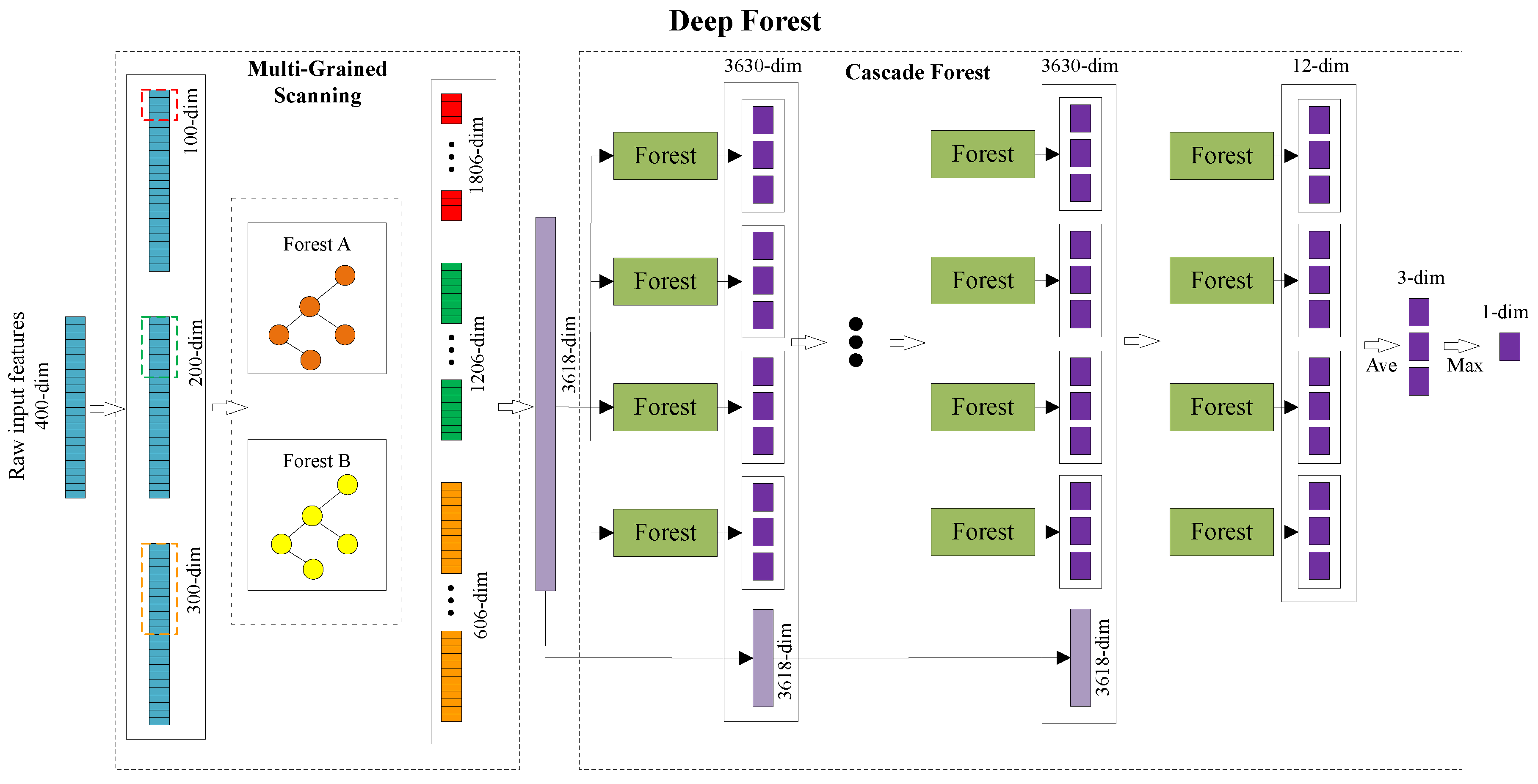
2.4. Deep Forest
2.4.1. Multi-Grained Scanning
2.4.2. Cascade Forest
3. The Proposed Scheme
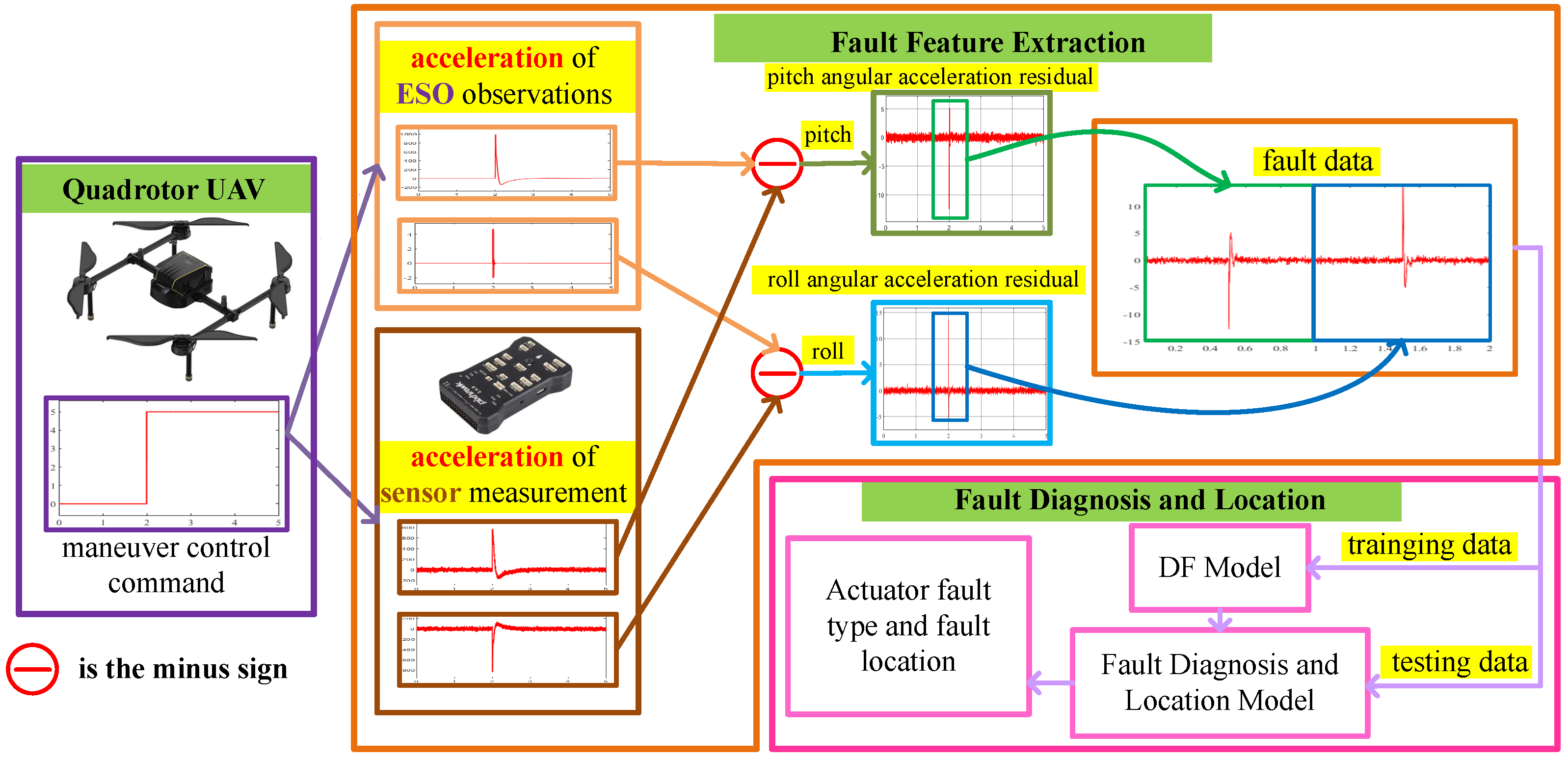
3.1. Fault Diagnosis and Localization Scheme Based on ESO-DF
3.2. Residual Acquisition Method Based on ESO
3.3. Residual Feature Analysis Method
3.4. Fault Dataset Establishment
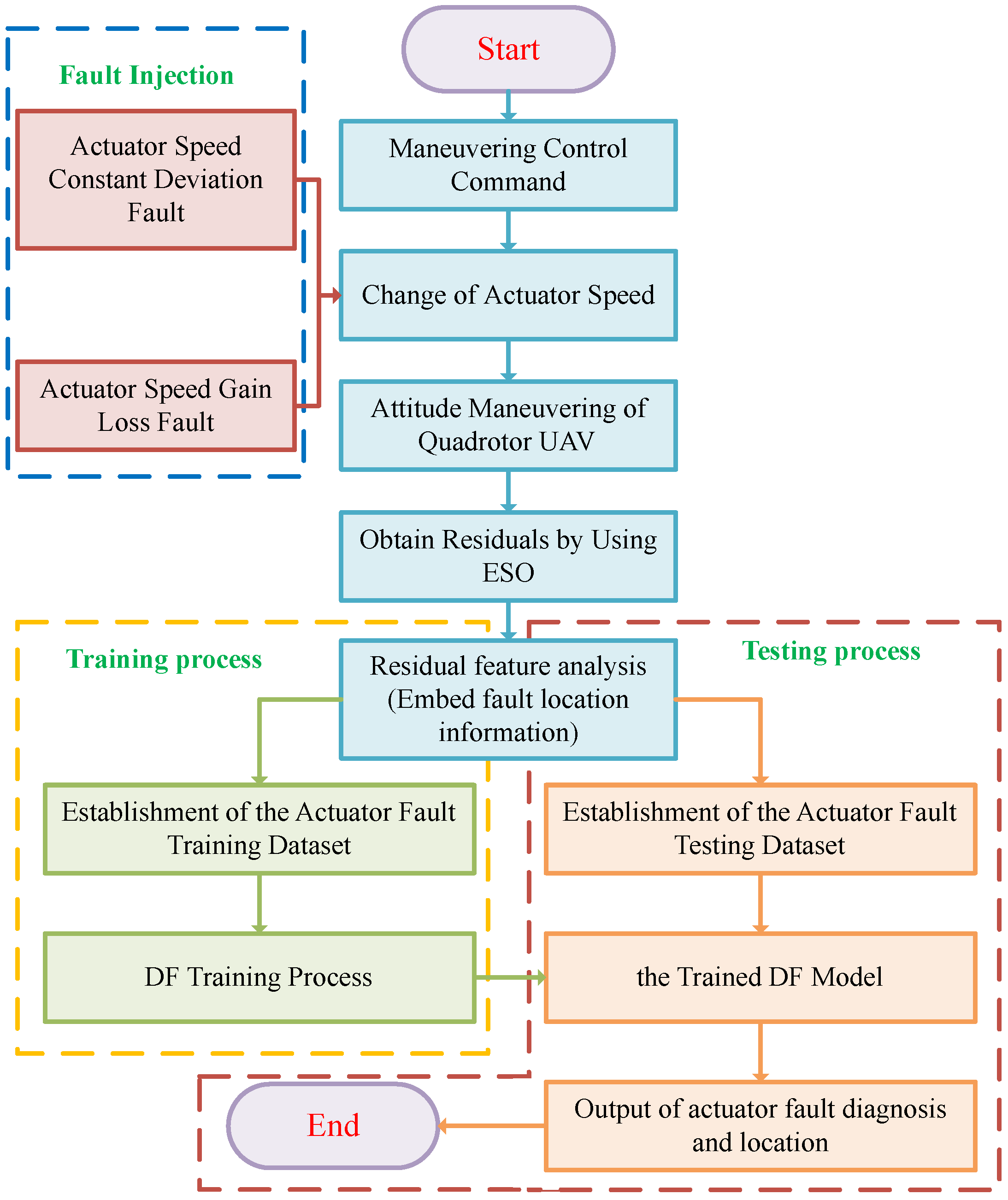
3.5. Workflow of Actuator Fault Diagnosis and Localization Based on ESO-DF
3.5.1. Training Process
- Injecting faults into actuators while maneuvering: injecting faults into actuators while the quadrotor UAV is performing attitude maneuvers.
- Extracting residual fault signals: According to the control torque and the angular acceleration information measured by the sensor, the ESO outputs the angular acceleration residual sequence containing the actuator fault information, that is, the fault data.
- Embedding fault localization information into fault data: we apply residual feature analysis method to embed fault localization information into fault data. The fault data obtained by embedding fault location information are a time series of a certain length.
- Train Fault Diagnosis and Localization Model: we obtain the fault diagnosis and localization model trained by injecting fault data into DF.
3.5.2. Testing Process
- Obtain testing data: we follow steps 1, 2, and 3 of the training process to obtain test failure data.
- Actuator fault diagnosis and localization: We complete the fault diagnosis and localization of the quadrotor UAV actuator by processing the test fault data using the trained model.
4. Simulation and Results Analysis
4.1. Metrics
4.2. Simulation Setup and Data Acquisition
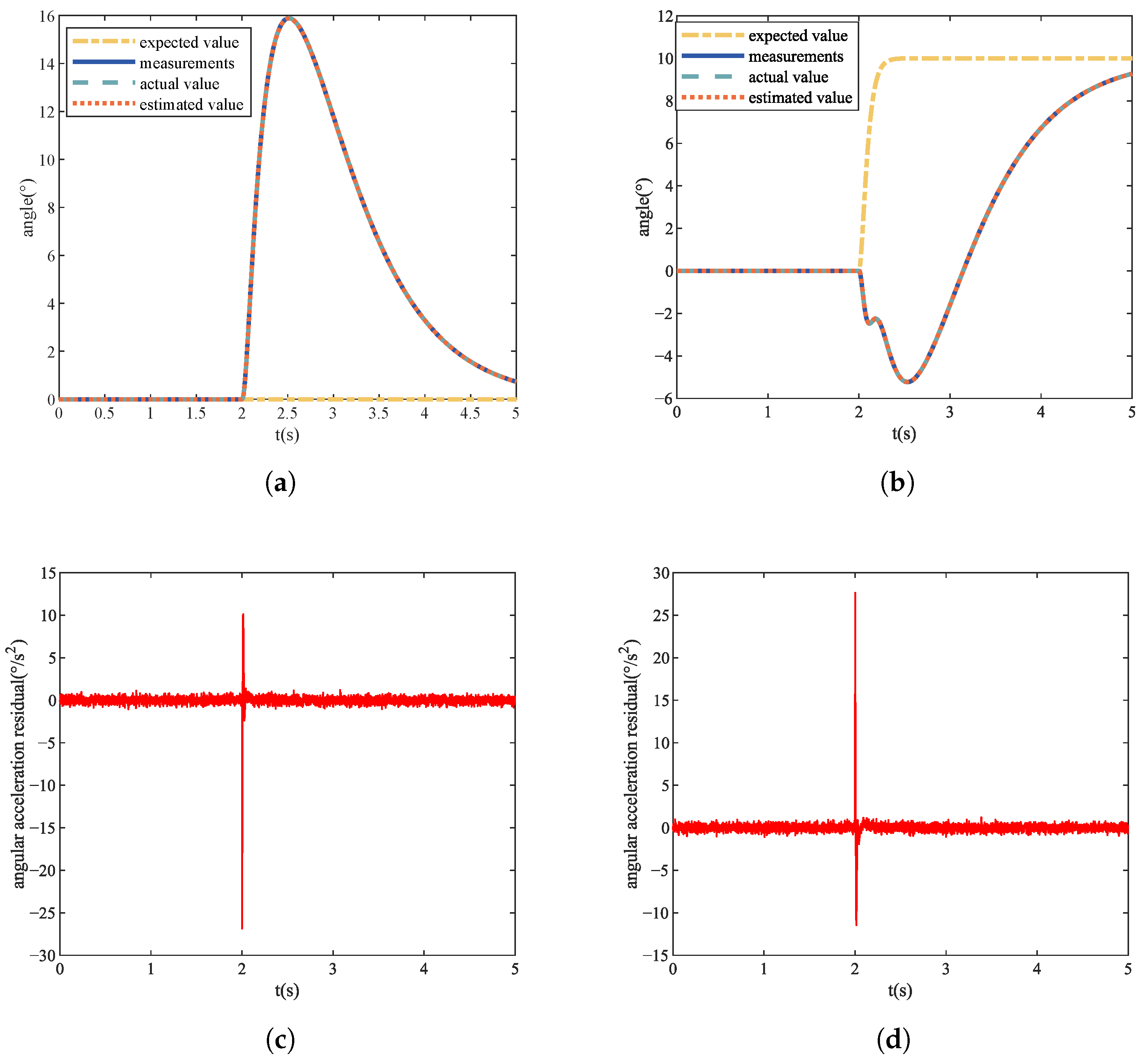
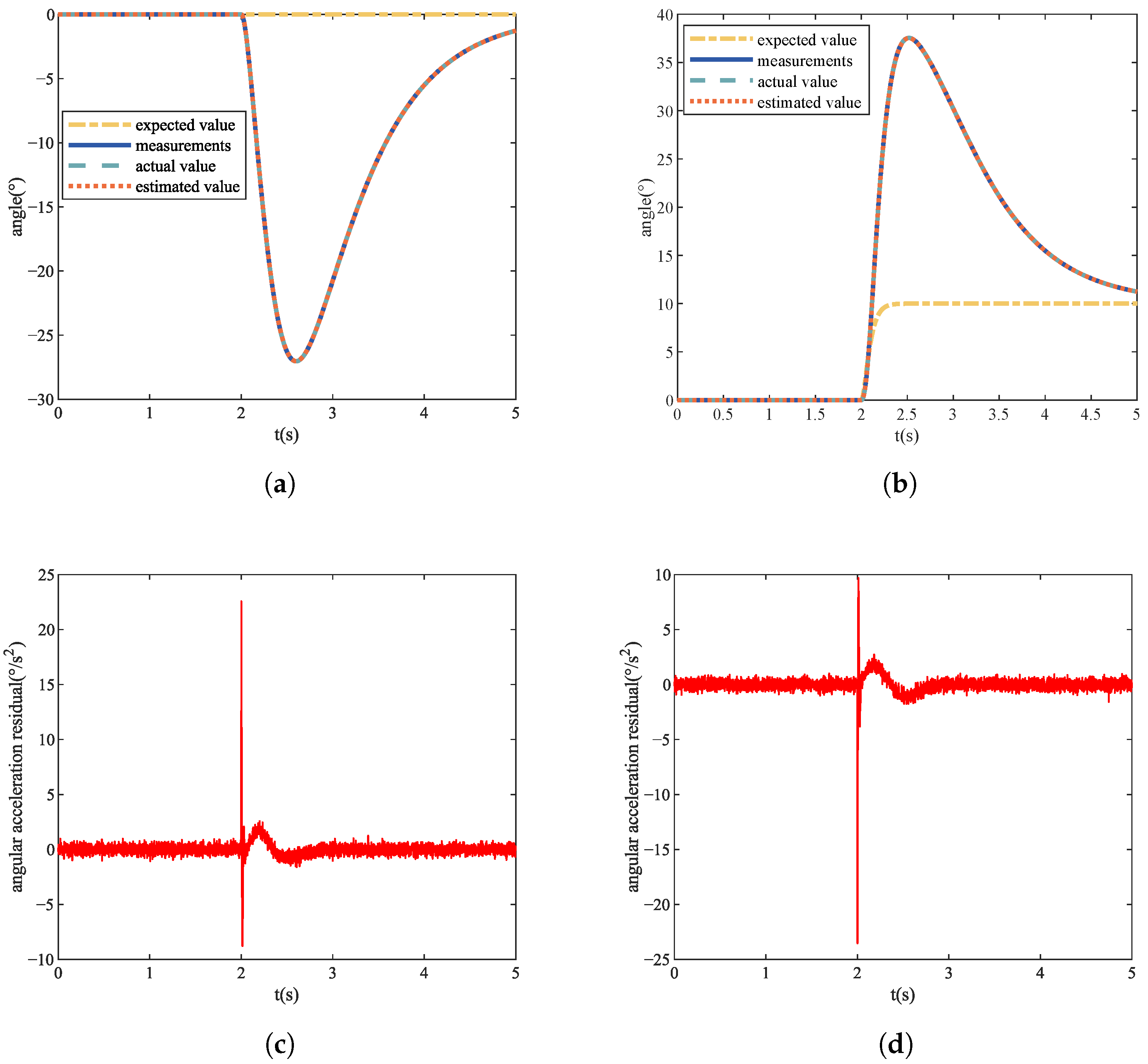
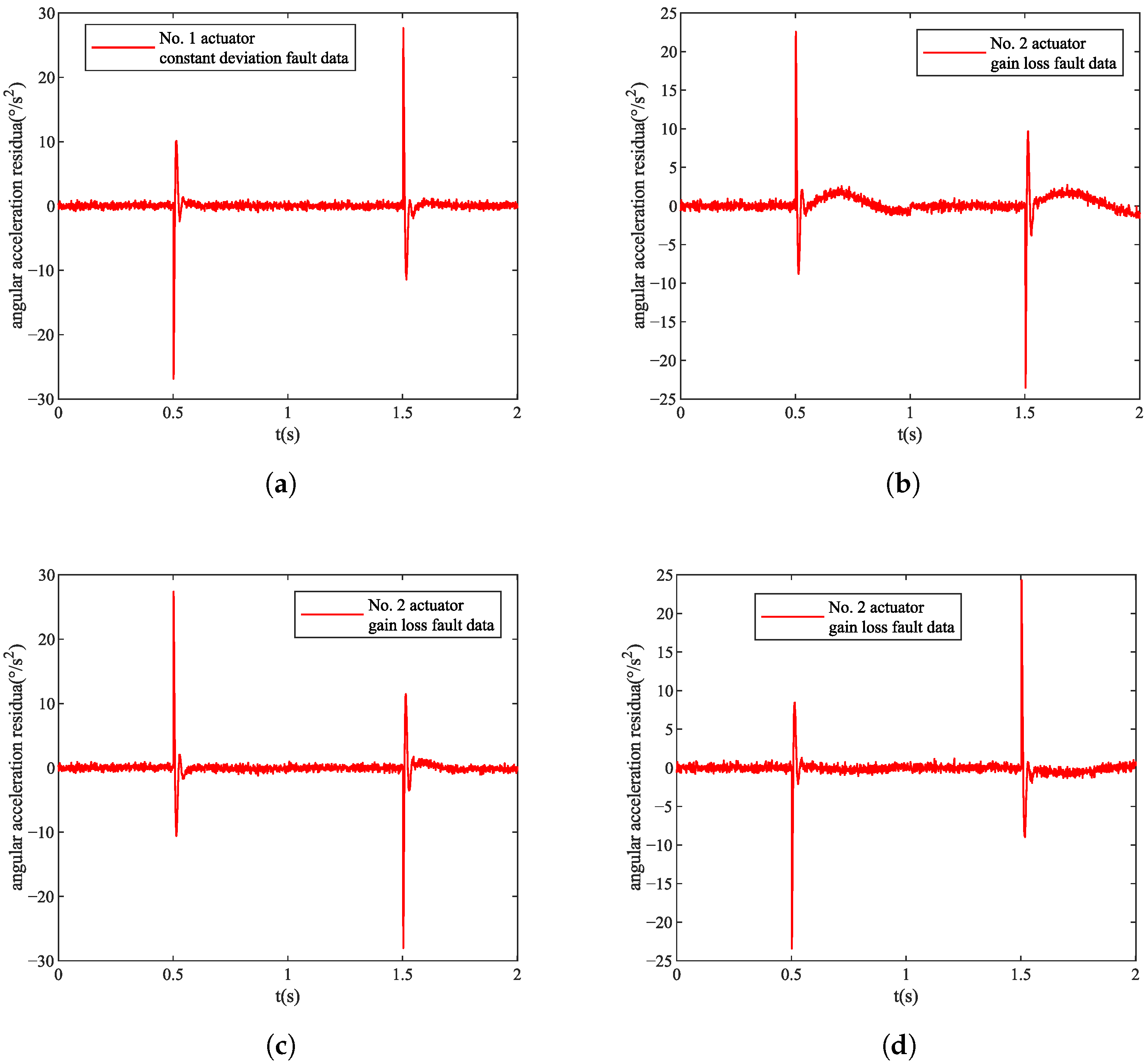
4.3. Actuator Fault Localization Analysis
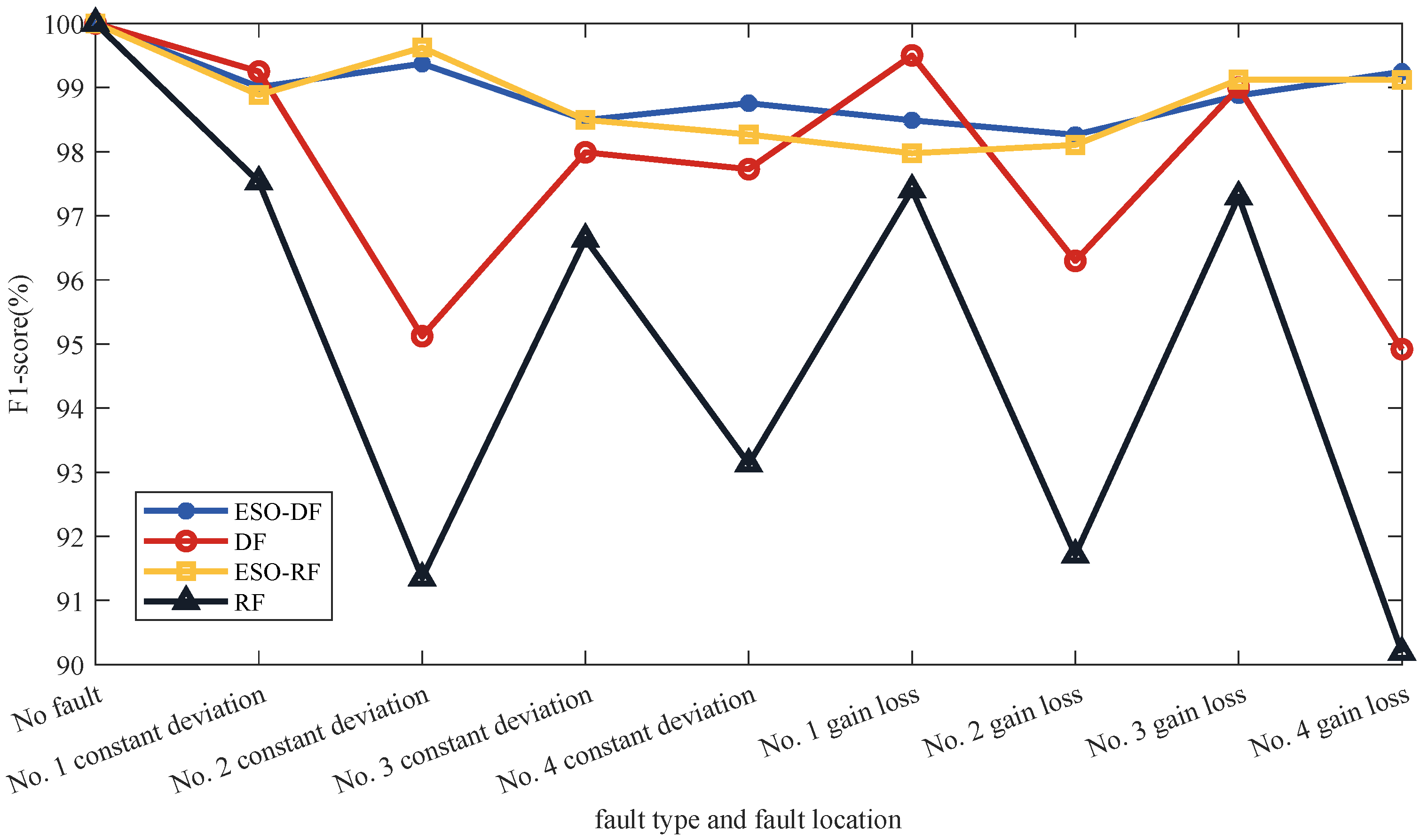
4.4. Comparative Analysis of Fault Diagnosis and Localization
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ai, S.; Song, J.; Cai, G. Sequence-to-Sequence Remaining Useful Life Prediction of the Highly Maneuverable Unmanned Aerial Vehicle: A Multilevel Fusion Transformer Network Solution. Mathematics 2022, 10, 1733. [Google Scholar] [CrossRef]
- D’Amato, E.; Nardi, V.A.; Notaro, I.; Scordamaglia, V. A particle filtering approach for fault detection and isolation of UAV IMU sensors: Design, implementation and sensitivity analysis. Sensors 2021, 21, 3066. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Zhao, Z.; Wang, Z.; Wang, X. Fault detection and identification method for quadcopter based on airframe vibration signals. Sensors 2021, 21, 581. [Google Scholar] [CrossRef] [PubMed]
- Okada, K.F.Á.; de Morais, A.S.; Oliveira-Lopes, L.C.; Ribeiro, L. Neuroadaptive Observer-Based Fault-Diagnosis and Fault-Tolerant Control for Quadrotor UAV. In Proceedings of the 2021 14th IEEE International Conference on Industry Applications (INDUSCON), Sao Paulo, Brazil, 15–18 August 2021; pp. 285–292. [Google Scholar]
- Zhang, H.; Gao, Q.; Pan, F. An Online Fault Diagnosis Method For Actuators Of Quadrotor UAV With Novel Configuration Based On IMM. In Proceedings of the 2020 Chinese Automation Congress (CAC), Shanghai, China, 6–8 November 2020; pp. 618–623. [Google Scholar]
- Chen, Y.; Wang, B.; Liu, W.; Liu, D. On-line and non-invasive anomaly detection system for unmanned aerial vehicle. In Proceedings of the 2017 Prognostics and System Health Management Conference (PHM-Harbin), Harbin, China, 9–12 July 2017; pp. 1–7. [Google Scholar]
- Tousi, M.; Khorasani, K. Robust observer-based fault diagnosis for an unmanned aerial vehicle. In Proceedings of the 2011 IEEE International Systems Conference, Nanjing, China, 15–18 September 2011; pp. 428–434. [Google Scholar]
- Caliskan, F.; Hajiyev, C. Active fault-tolerant control of UAV dynamics against sensor-actuator failures. J. Aerosp. Eng. 2016, 29, 04016012. [Google Scholar] [CrossRef]
- Fu, J.; Sun, C.; Yu, Z.; Liu, L. A hybrid CNN-LSTM model based actuator fault diagnosis for six-rotor UAVs. In Proceedings of the 2019 Chinese Control and Decision Conference (CCDC), Nanchang, China, 3–5 June 2019; pp. 410–414. [Google Scholar]
- Ren, X. Observer design for actuator failure of a quadrotor. IEEE Access 2020, 8, 152742–152750. [Google Scholar] [CrossRef]
- Gao, J.; Zhang, Q.; Chen, J. EKF-based actuator fault detection and diagnosis method for tilt-rotor unmanned aerial vehicles. Math. Probl. Eng. 2020, 2020, 8019017. [Google Scholar] [CrossRef]
- Ai, S.; Song, J.; Cai, G. Diagnosis of sensor faults in hypersonic vehicles using wavelet packet translation based support vector regressive classifier. IEEE Trans. Reliab. 2021, 70, 901–915. [Google Scholar] [CrossRef]
- Balestrieri, E.; Daponte, P.; De Vito, L.; Picariello, F.; Tudosa, I. Sensors and measurements for UAV safety: An overview. Sensors 2021, 21, 8253. [Google Scholar] [CrossRef] [PubMed]
- Park, J.; Chang, D. Data-driven fault detection and isolation of system with only state measurements and control inputs using neural networks. In Proceedings of the 2021 21st International Conference on Control, Automation and Systems (ICCAS), Jeju, Korea, 12–15 October 2021; pp. 108–112. [Google Scholar]
- Song, J.; Su, J.; Hu, Y.; Zhao, M.; Gao, K. Stability and performance comparison analysis for linear active disturbance rejection control—Based system. Trans. Inst. Meas. Control 2022, 01423312211065918. [Google Scholar] [CrossRef]
- Tang, P.; Lin, D.; Zheng, D.; Fan, S.; Ye, J. Observer based finite-time fault tolerant quadrotor attitude control with actuator faults. Aerosp. Sci. Technol. 2020, 104, 105968. [Google Scholar] [CrossRef]
- Li, X.; Chao, H.; Wang, J.; Xu, Q.; Yang, K.; Mao, D. An Iterative learning extended-state observer-based fuzzy fault-tolerant control approach for AUVs. Mar. Technol. Soc. J. 2021, 55, 33–46. [Google Scholar] [CrossRef]
- Zhou, Z.; Feng, J. Deep forest. Natl. Sci. Rev. 2019, 6, 74–86. [Google Scholar] [CrossRef] [PubMed]
- Qin, X.; Xu, D.; Dong, X.; Cui, X.; Zhang, S. The fault diagnosis of rolling bearing based on improved deep forest. Shock Vib. 2021, 2021, 1–13. [Google Scholar] [CrossRef]
- Ai, S.; Shang, W.; Song, J.; Cai, G. Fault Diagnosis of the Four-Rotor Unmanned Aerial Vehicle using the Optimized Deep Forest Algorithm based on the Wavelet Packet Translation. In Proceedings of the 2021 8th International Conference on Dependable Systems and Their Applications (DSA), Yinchuan, China, 5–6 August 2021; pp. 581–589. [Google Scholar]
- Zhao, K.; Song, J.; Wang, X. ESO-KELM-based minor sensor fault identification. J. China Univ. Posts Telecommun. 2021, 28, 53. [Google Scholar]
- Guzmán-Rabasa, J.A.; López-Estrada, F.R.; González-Contreras, B.M.; Valencia-Palomo, G.; Chadli, M.; Perez-Patricio, M. Actuator fault detection and isolation on a quadrotor unmanned aerial vehicle modeled as a linear parameter-varying system. Meas. Control 2019, 52, 1228–1239. [Google Scholar] [CrossRef]
- Du, B.; Polyakov, A.; Zheng, G.; Quan, Q. Quadrotor trajectory tracking by using fixed-time differentiator. Int. J. Control 2019, 92, 2854–2868. [Google Scholar] [CrossRef]
- Yu, B.; Zhang, Y.; Qu, Y. MPC-based FTC with FDD against actuator faults of UAVs. In Proceedings of the 2015 15th International Conference on Control, Automation and Systems (ICCAS), Busan, Korea, 13–16 October 2015; pp. 225–230. [Google Scholar]
- Zhao, Z.; Guo, B. A novel extended state observer for output tracking of MIMO systems with mismatched uncertainty. IEEE Trans. Autom. Control 2017, 63, 211–218. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Actuator Number and Fault | Pitch Angle | Residual Ofpitch Angular Acceleration | Roll Angle | Residual of Roll Angular Acceleration |
|---|---|---|---|---|
| No. 1 constant deviation | ↑ | ↑ | ↓ | ↓ |
| No. 2 constant deviation | ↓ | ↓ | ↑ | ↑ |
| No. 3 constant deviation | ↓ | ↓ | ↓ | ↓ |
| No. 4 constant deviation | ↑ | ↑ | ↑ | ↑ |
| No. 1 gain loss | ↓ | ↓ | ↑ | ↑ |
| No. 2 gain loss | ↑ | ↑ | ↓ | ↓ |
| No. 3 gain loss | ↑ | ↑ | ↑ | ↑ |
| No. 4 gain loss | ↓ | ↓ | ↓ | ↓ |
| Number | Specific Scheme |
|---|---|
| scheme 1 | ESO-DF |
| scheme 2 | DF |
| scheme 3 | ESO-RF |
| scheme 4 | RF |
| Scheme | The Training Accuracy | The Testing Accuracy |
|---|---|---|
| ESO-DF | 99.3000% | 99.0500% |
| DF | 97.9750% | 97.9750% |
| ESO-RF | 98.9500% | 98.9500% |
| RF | 95.5500% | 95.5500% |
| Fault Type and Location | Precision | Recall | ||||||
|---|---|---|---|---|---|---|---|---|
| ESO-DF | DF | ESO-RF | RF | ESO-DF | DF | ESO-RF | RF | |
| No fault | 100.0000% | 100.0000% | 100.0000% | 100.0000% | 100.0000% | 100.0000% | 100.0000% | 100.0000% |
| No. 1 constant deviation | 98.2759% | 99.2500% | 98.0344% | 96.3415% | 99.7500% | 99.2500% | 99.7500% | 98.7500% |
| No. 2 constant deviation | 99.7481% | 92.8571% | 100.0000% | 89.0736% | 99.0000% | 97.5000% | 99.2500% | 93.7500% |
| No. 3 constant deviation | 98.9899% | 98.4848% | 98.7437% | 96.2779% | 98.0000% | 97.5000% | 98.2500% | 97.0000% |
| No. 4 constant deviation | 98.2673% | 98.7245% | 97.3039% | 94.8187% | 99.2500% | 96.7500% | 99.2500% | 91.5000% |
| No. 1 gain loss | 99.2386% | 99.2537% | 99.2308% | 96.3325% | 97.7500% | 99.7500% | 96.7500% | 98.5000% |
| No. 2 gain loss | 97.5369% | 98.4334% | 97.2906% | 95.1613% | 99.0000% | 94.2500% | 98.7500% | 88.5000% |
| No. 3 gain loss | 98.7531% | 99.0000% | 99.2481% | 95.6522% | 99.0000% | 99.0000% | 99.0000% | 99.0000% |
| No. 4 gain loss | 99.7475% | 94.1032% | 99.7468% | 91.9481% | 98.7500% | 95.7500% | 98.5000% | 88.5000% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, J.; Shang, W.; Ai, S.; Zhao, K. Model and Data-Driven Combination: A Fault Diagnosis and Localization Method for Unknown Fault Size of Quadrotor UAV Actuator Based on Extended State Observer and Deep Forest. Sensors 2022, 22, 7355. https://doi.org/10.3390/s22197355
Song J, Shang W, Ai S, Zhao K. Model and Data-Driven Combination: A Fault Diagnosis and Localization Method for Unknown Fault Size of Quadrotor UAV Actuator Based on Extended State Observer and Deep Forest. Sensors. 2022; 22(19):7355. https://doi.org/10.3390/s22197355
Chicago/Turabian StyleSong, Jia, Weize Shang, Shaojie Ai, and Kai Zhao. 2022. "Model and Data-Driven Combination: A Fault Diagnosis and Localization Method for Unknown Fault Size of Quadrotor UAV Actuator Based on Extended State Observer and Deep Forest" Sensors 22, no. 19: 7355. https://doi.org/10.3390/s22197355