
Application of a Control Scheme Based on Predictive and Linear Strategy for Improved Transient State and Steady-State Performance in a Single-Phase Quasi-Z-Source Inverter

 , , and
, , and
Abstract
:1. Introduction
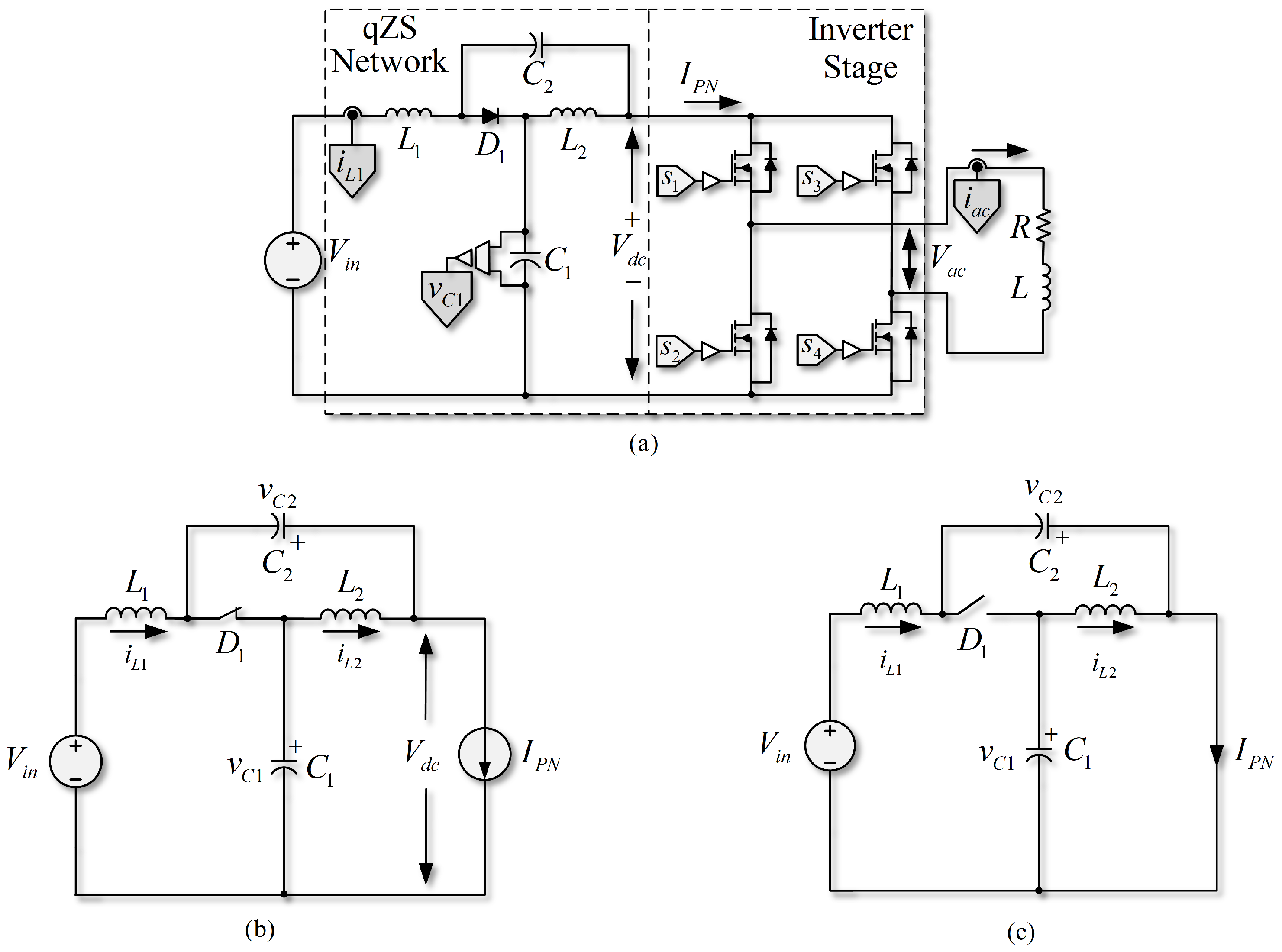
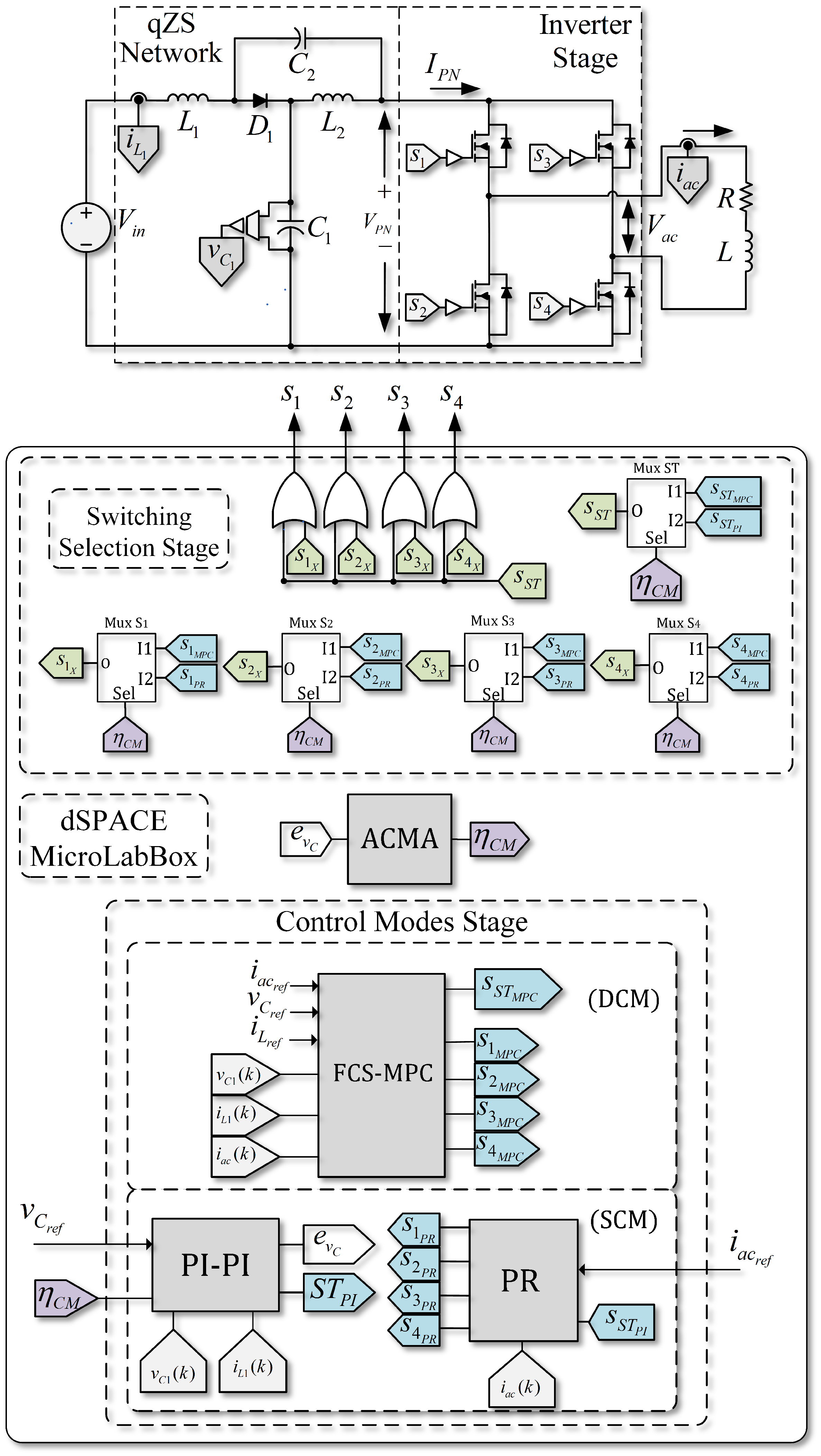
2. The Single-Phase Quasi-Z-Source Inverter

Model of the dc Side at the qZSI
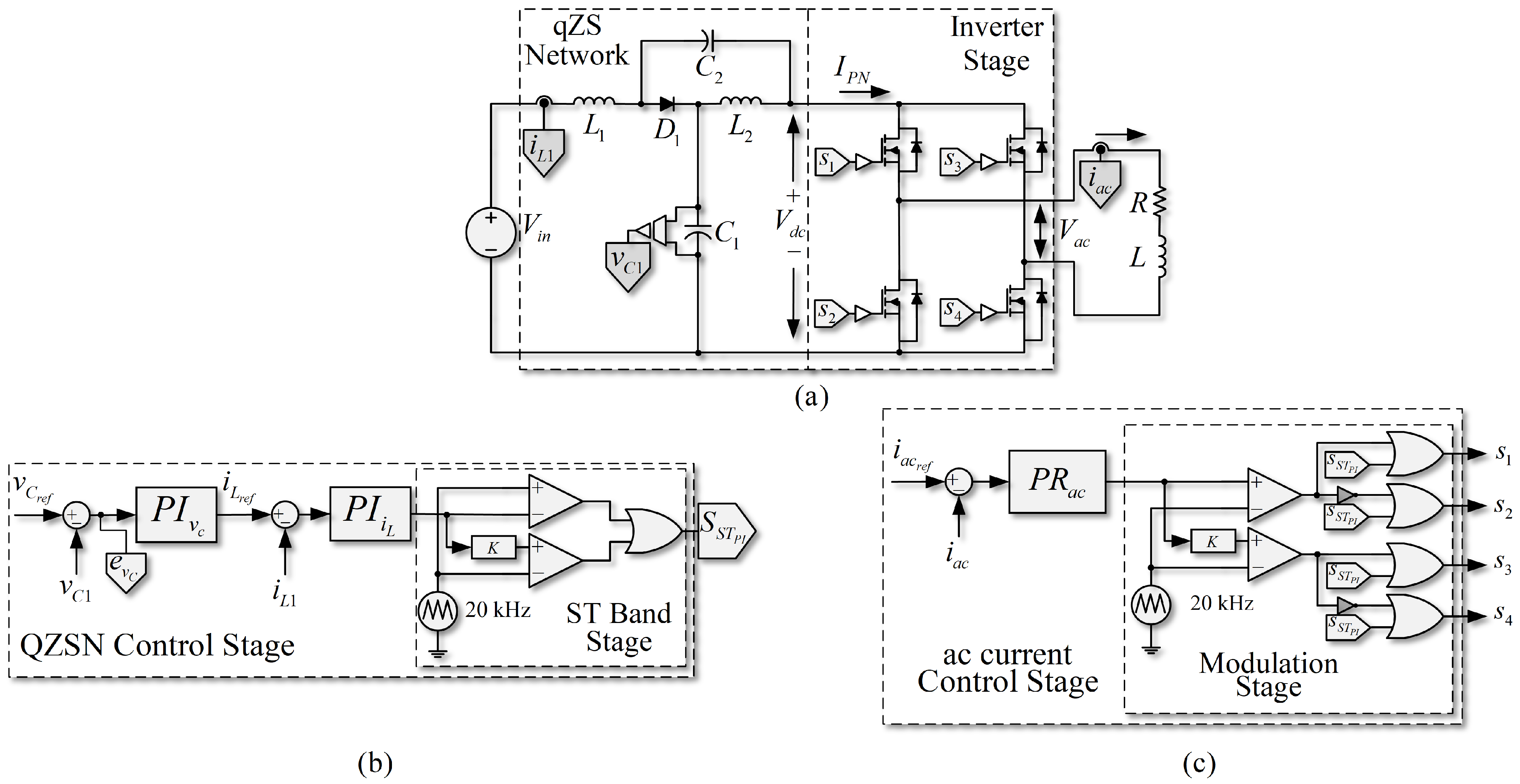
3. Linear and Predictive Control Schemes for a SP-qZSI
3.1. PWM Linear Control in SP-qZSI
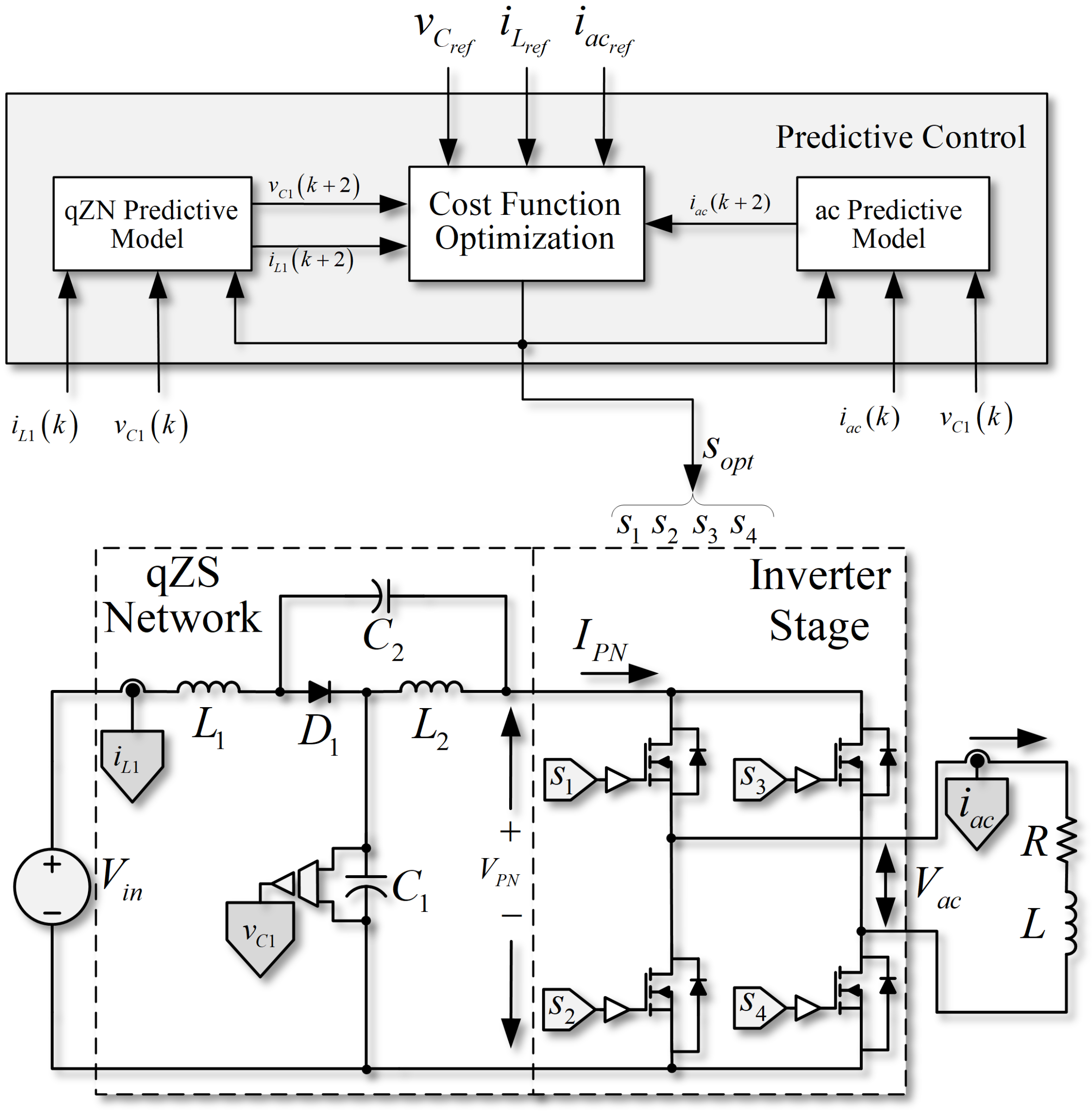
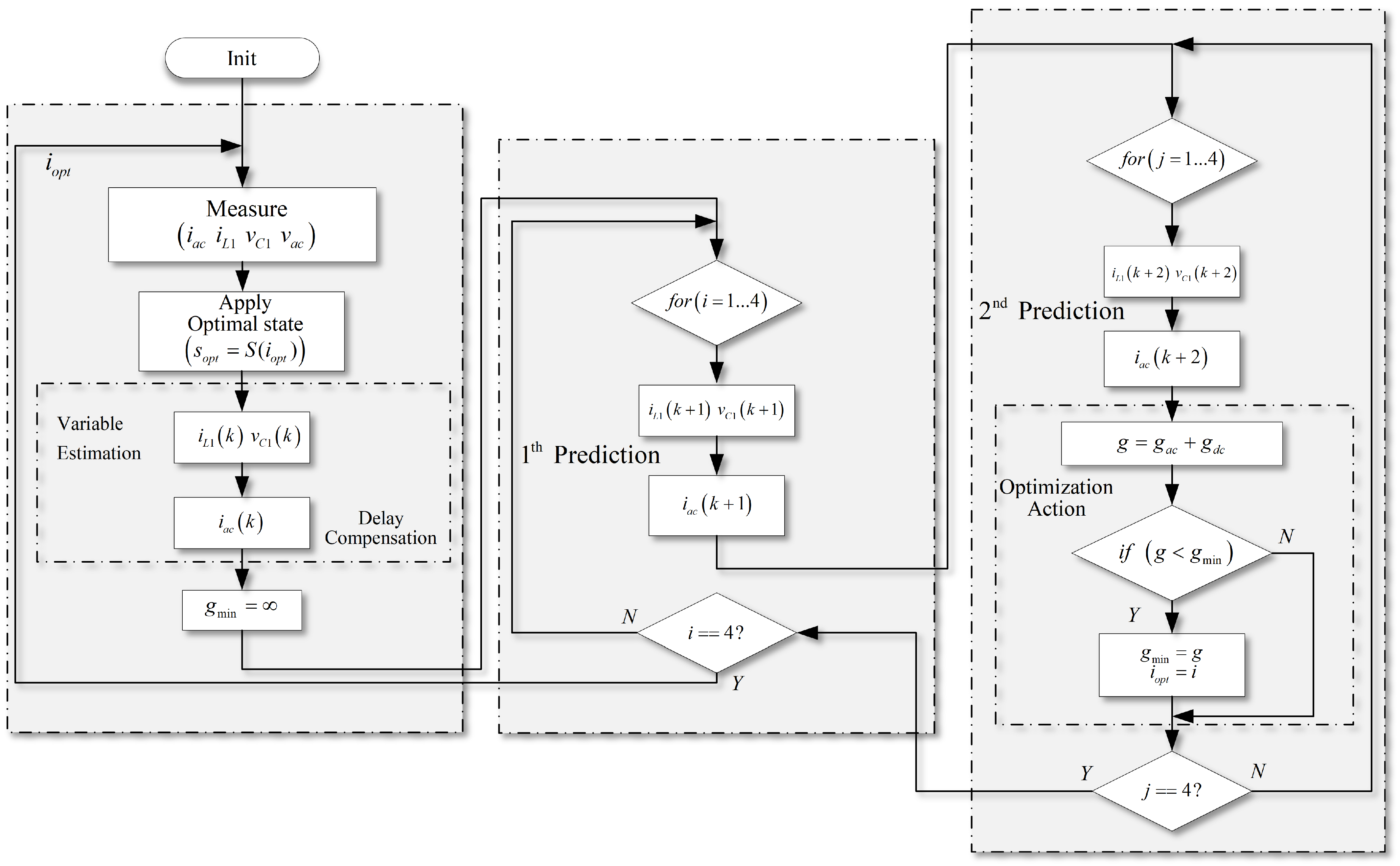
3.2. Predictive Control in the SP-qZSI
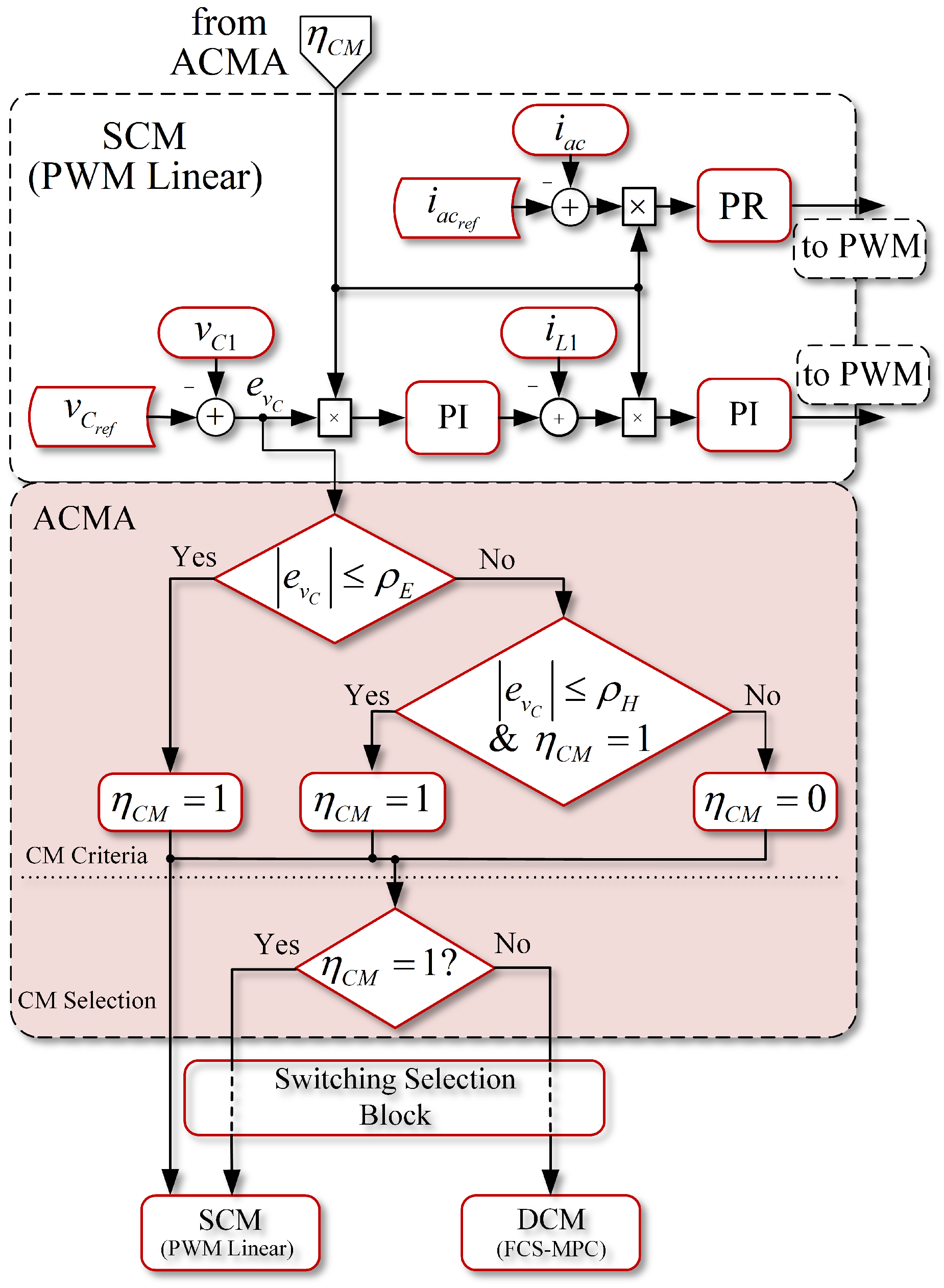
4. Alternating Control Modes in SP-qZSI
4.1. Switching Criteria of the Control Modes
4.1.1. Basic Switching Criterion
4.1.2. Improved Switching Criterion
4.2. Implementation Using ACMA in an SP-qZSI
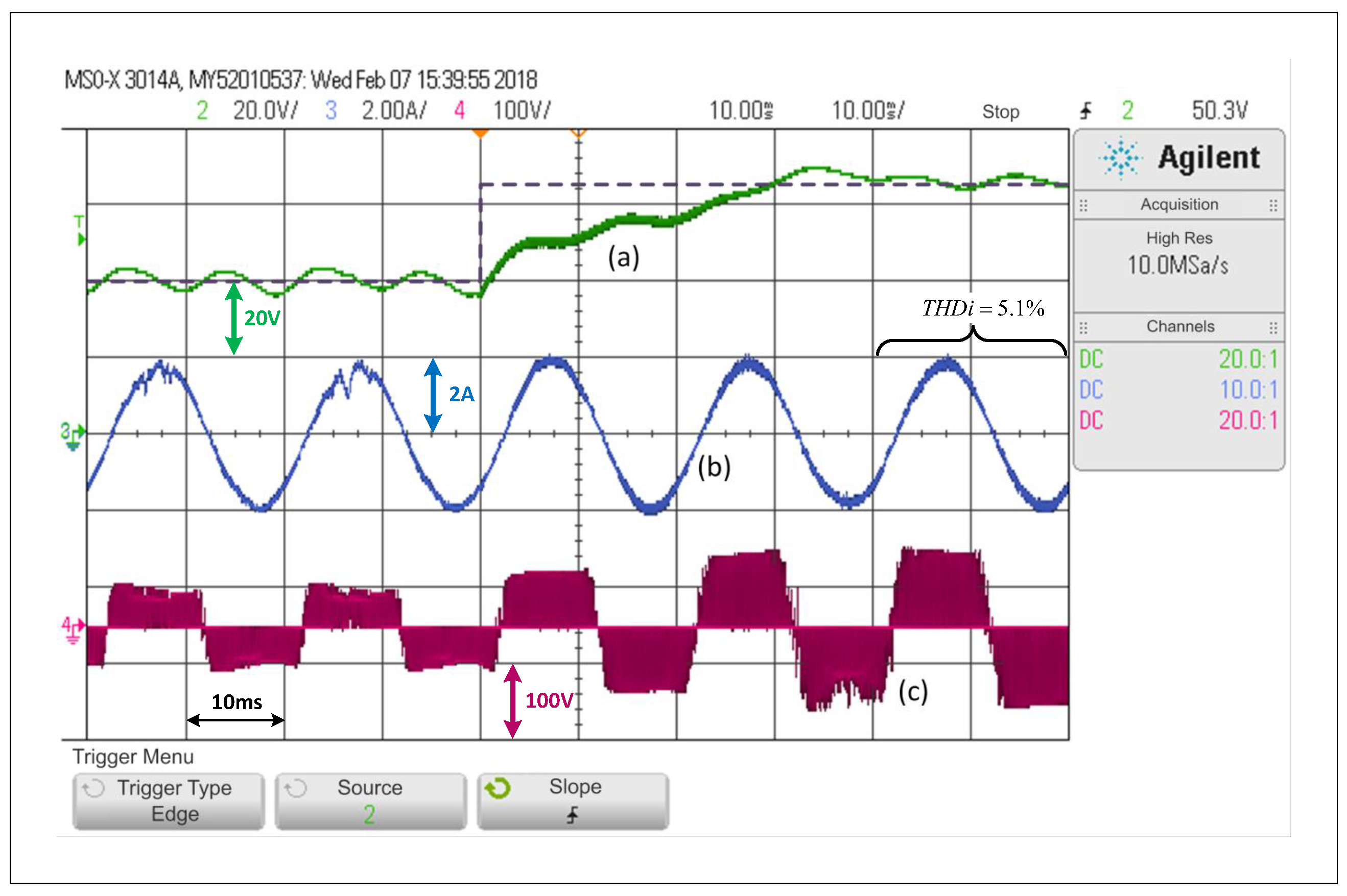
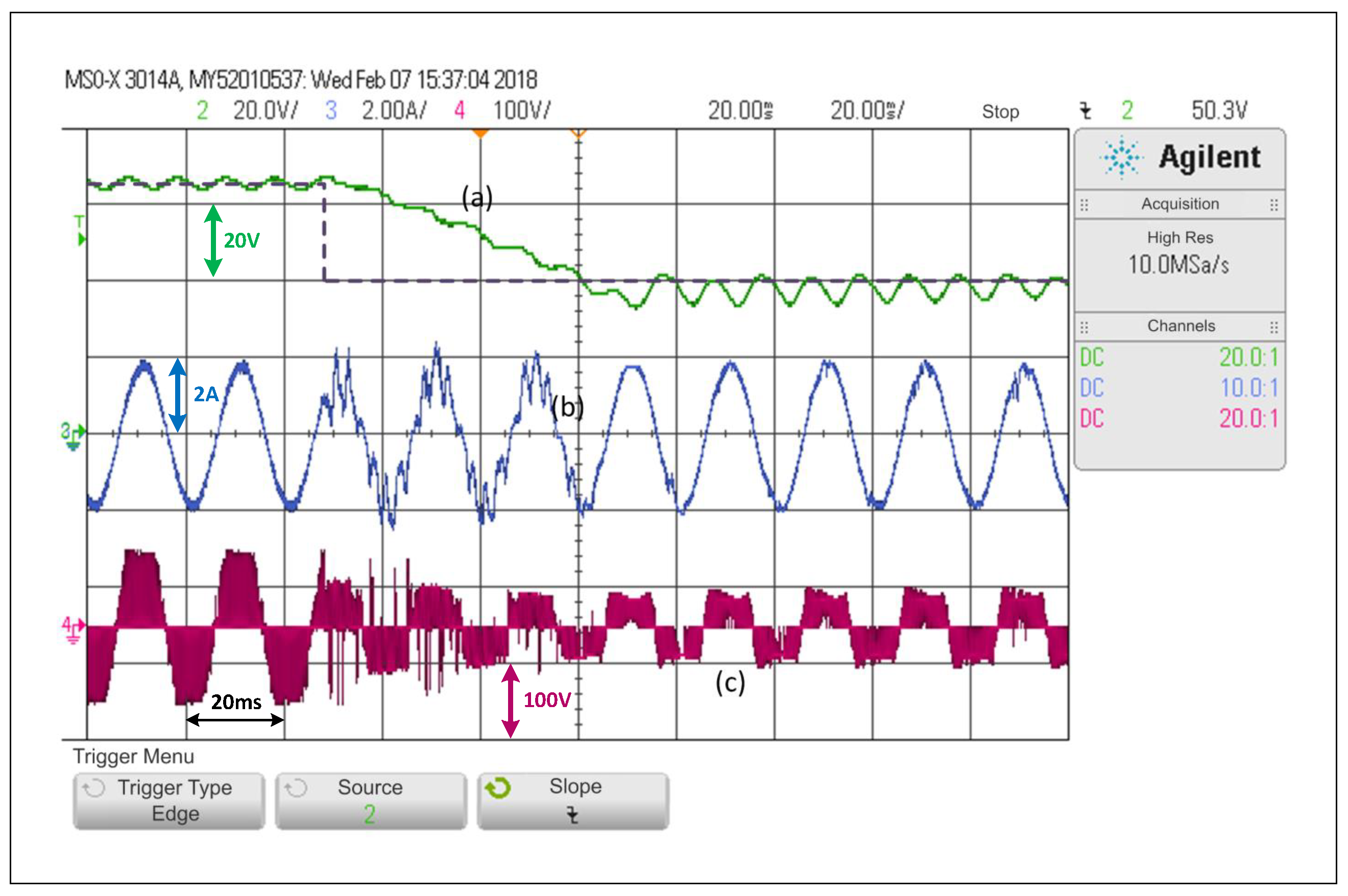
5. Experimental Verification
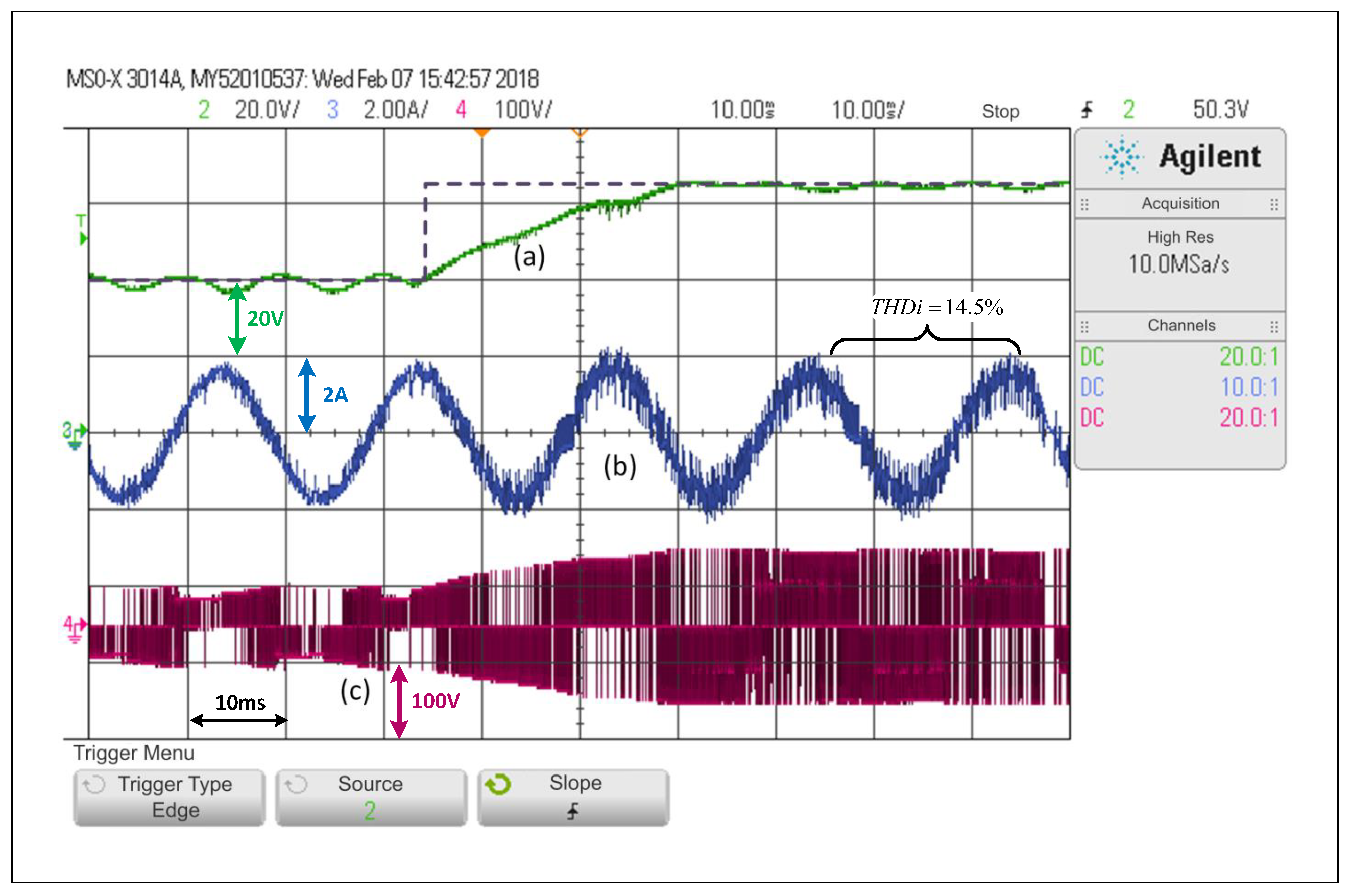
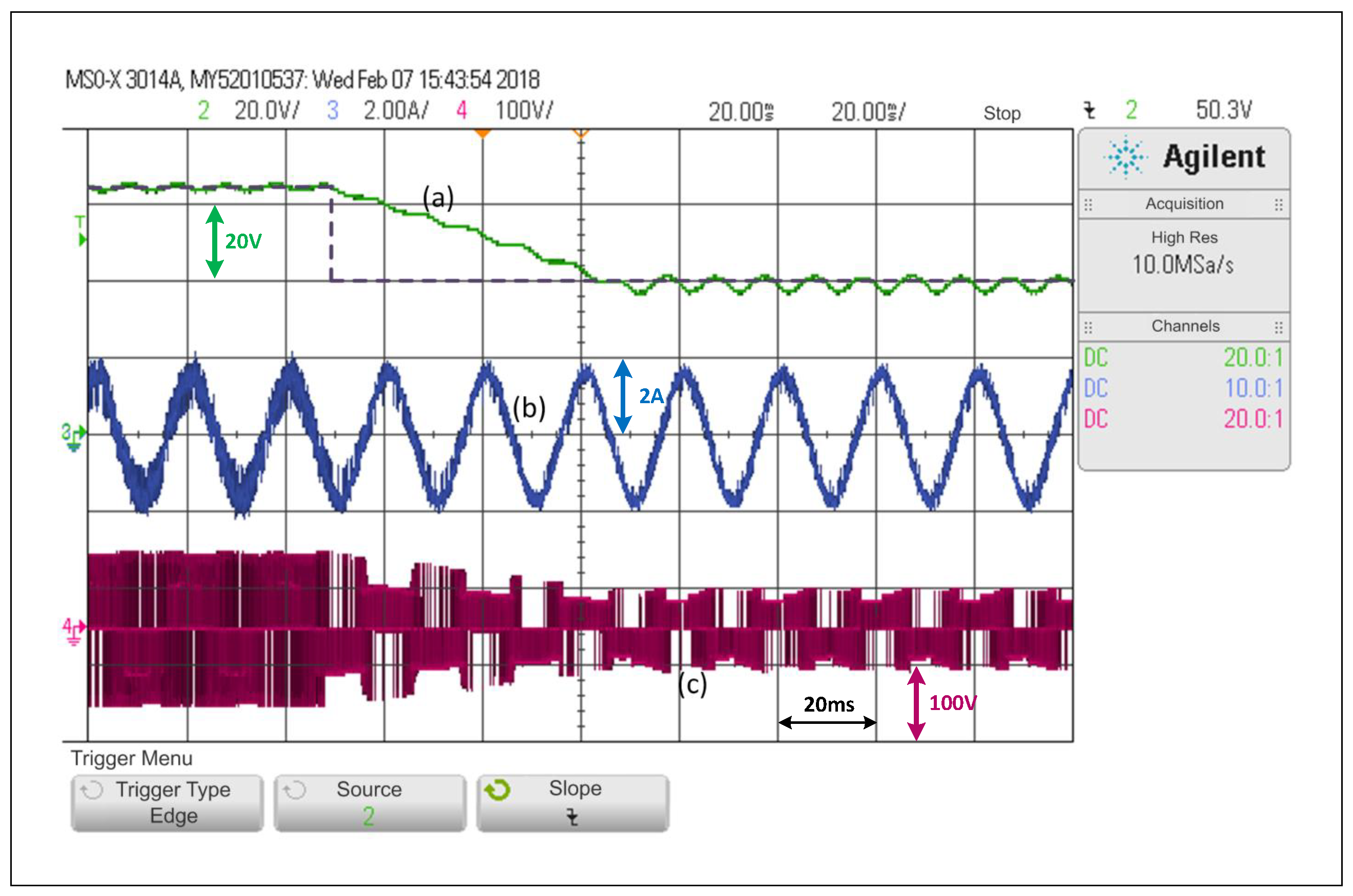
5.1. qZSI Operating under a PWM Linear Control
5.2. qZSI Operating under an FCS-MPC Scheme
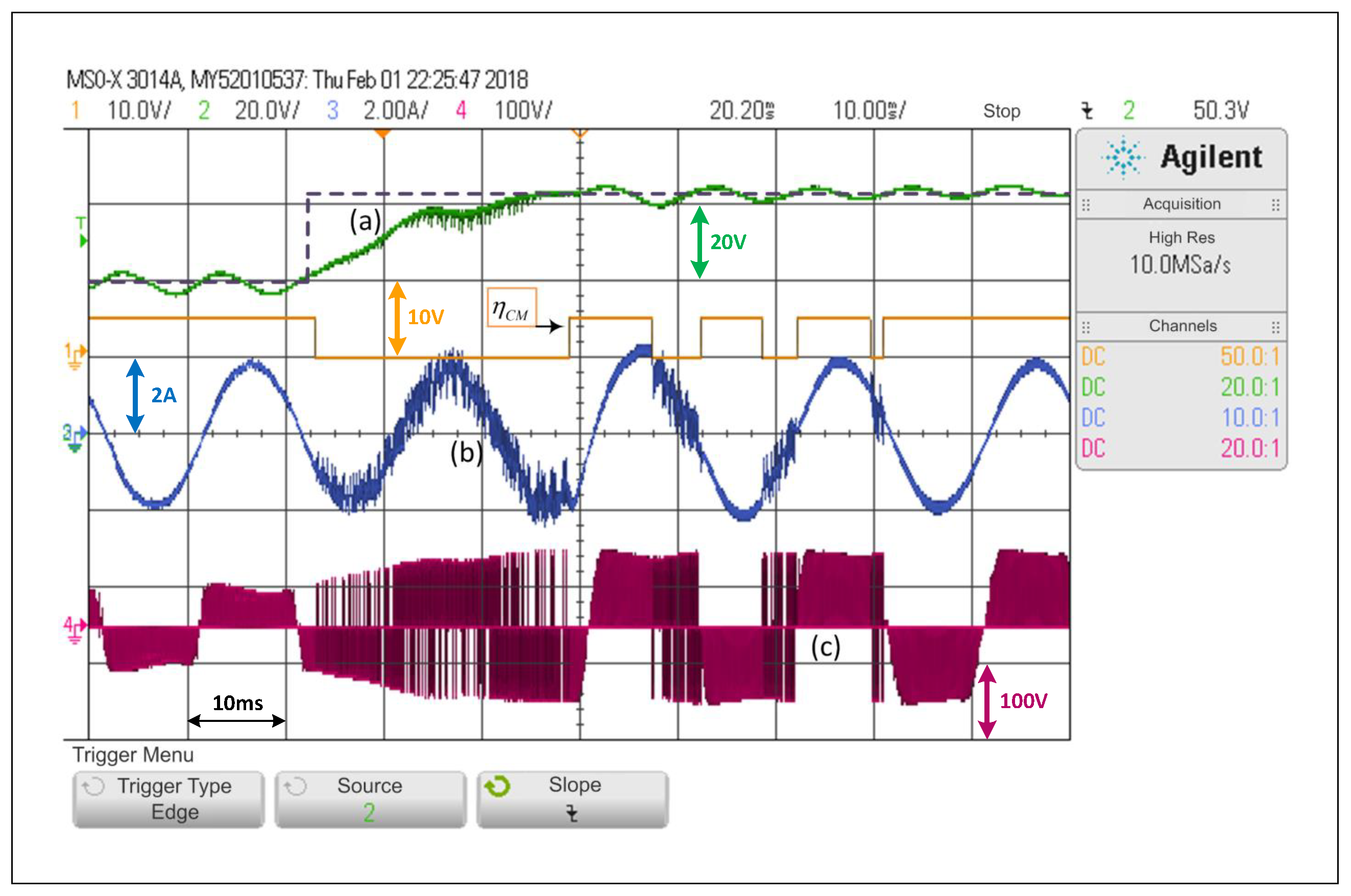
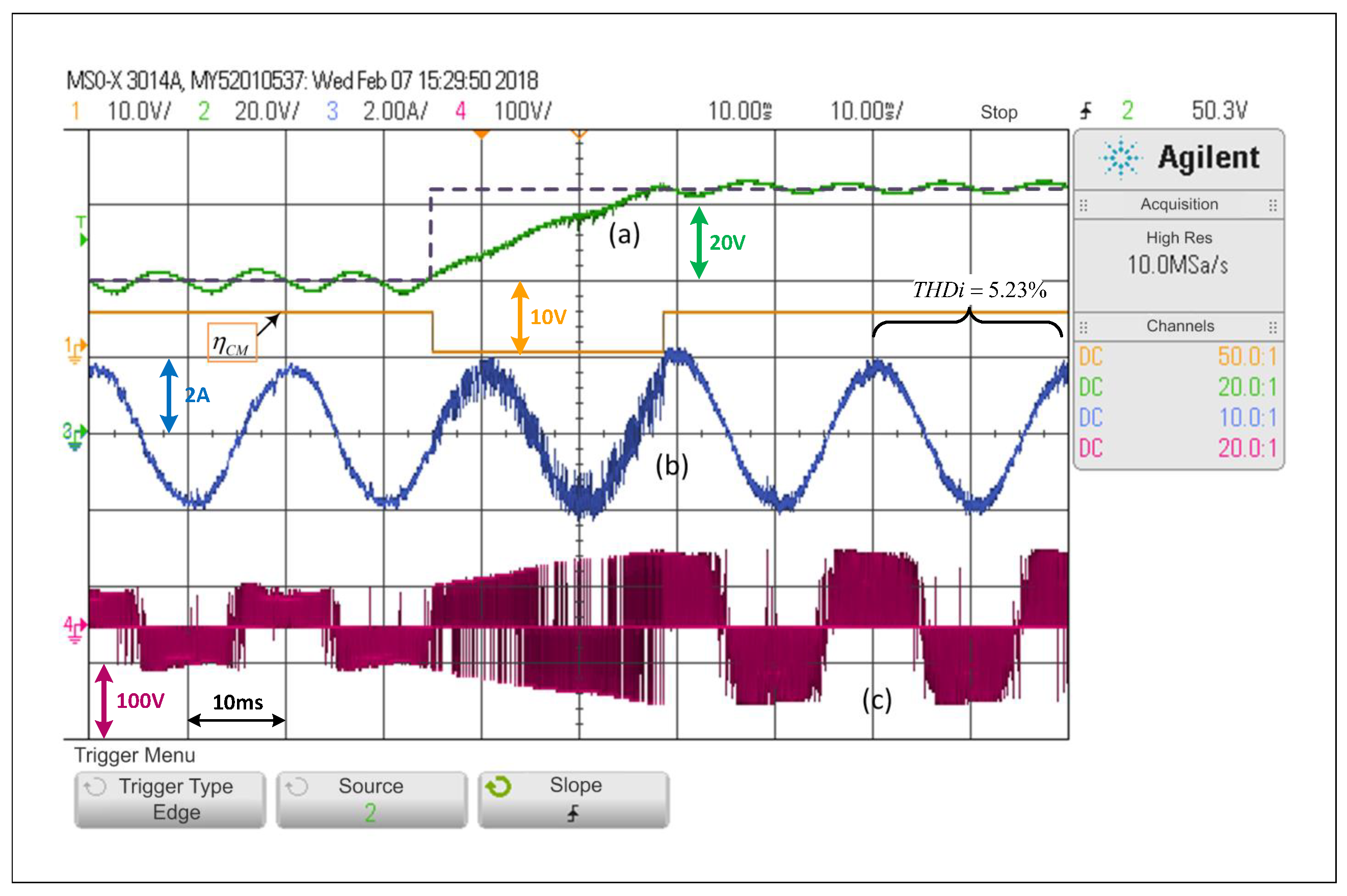
5.3. ACMA Performance
5.4. Regarding Complexity of the Proposal and Computational Burden
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Singh, S. Energy saving estimation in distribution network with smart grid-enabled CVR and solar PV inverter. IET Gener. Transm. Distrib. 2018, 12, 1346–1358. [Google Scholar] [CrossRef]
- Martins, J.F.; Romero-Cadaval, E.; Vinnikov, D.; Malinowski, M. Transactive Energy: Power Electronics Challenges. IEEE Power Electron. Mag. 2022, 9, 20–32. [Google Scholar] [CrossRef]
- Luo, F.L.; Ye, H. Advanced DC/AC Inverters: Applications in Renewable Energy; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Gautam, A.R.; Fulwani, D.M.; Makineni, R.R.; Rathore, A.K.; Singh, D. Control Strategies and Power Decoupling Topologies to Mitigate 2ω-Ripple in Single-Phase Inverters: A Review and Open Challenges. IEEE Access 2020, 8, 147533–147559. [Google Scholar] [CrossRef]
- Mande, D.; Trovão, J.P.; Ta, M.C. Comprehensive Review on Main Topologies of Impedance Source Inverter Used in Electric Vehicle Applications. World Electr. Veh. J. 2020, 11, 37. [Google Scholar] [CrossRef]
- Liu, Y.; Abu-Rub, H.; Ge, B.; Blaabjerg, F.; Ellabban, O.; Loh, P.C. Impedance Source Power Electronic Converters; John Wiley & Sons: Hoboken, NJ, USA, 2016. [Google Scholar]
- Ellabban, O.; Abu-Rub, H. Z-Source Inverter: Topology Improvements Review. IEEE Ind. Electron. Mag. 2016, 10, 6–24. [Google Scholar] [CrossRef]
- Liu, Y.; Abu-Rub, H.; Ge, B. Z-Source & Quasi-Z-Source Inverters: Derived Networks, Modulations, Controls, and Emerging Applications to Photovoltaic Conversion. IEEE Ind. Electron. Mag. 2014, 8, 32–44. [Google Scholar] [CrossRef]
- Guo, W.; Li, D.; Cai, F.; Zhao, C.; Xiao, L. Z-Source-Converter-Based Power Conditioning System for Superconducting Magnetic Energy Storage System. IEEE Trans. Power Electron. 2019, 34, 7863–7877. [Google Scholar] [CrossRef]
- Baier, C.R.; Torres, M.A.; Acuña, P.; Muñoz, J.A.; Melín, P.E.; Restrepo, C.; Guzman, J.I. Analysis and Design of a Control Strategy for Tracking Sinusoidal References in Single-Phase Grid-Connected Current-Source Inverters. IEEE Trans. Power Electron. 2018, 33, 819–832. [Google Scholar] [CrossRef]
- Sharma, V.; Saini, P.; Garg, S.; Negi, B. Comparative analysis of VSI, CSI and ZSI fed induction motor drive system. In Proceedings of the 2016 3rd International Conference on Computing for Sustainable Global Development (INDIACom), New Delhi, India, 16–18 March 2016; pp. 1188–1191. [Google Scholar]
- Peng, F.Z. Z-source inverter. IEEE Trans. Ind. Appl. 2003, 39, 504–510. [Google Scholar] [CrossRef]
- Bakeer, A.; Magdy, G.; Chub, A.; Vinnikov, D. Predictive control based on ranking multi-objective optimization approaches for a quasi-Z source inverter. CSEE J. Power Energy Syst. 2021, 7, 1152–1160. [Google Scholar] [CrossRef]
- Li, Y.; Jiang, S.; Cintron-Rivera, J.G.; Peng, F.Z. Modeling and Control of Quasi-Z-Source Inverter for Distributed Generation Applications. IEEE Trans. Ind. Electron. 2013, 60, 1532–1541. [Google Scholar] [CrossRef]
- Gajanayake, C.J.; Vilathgamuwa, D.M.; Loh, P.C. Development of a Comprehensive Model and a Multiloop Controller for Z-Source Inverter DG Systems. IEEE Trans. Ind. Electron. 2007, 54, 2352–2359. [Google Scholar] [CrossRef]
- Abu-Rub, H.; Iqbal, A.; Moin Ahmed, S.; Peng, F.Z.; Li, Y.; Baoming, G. Quasi-Z-Source Inverter-Based Photovoltaic Generation System with Maximum Power Tracking Control Using ANFIS. IEEE Trans. Sustain. Energy 2013, 4, 11–20. [Google Scholar] [CrossRef]
- Ding, X.; Qian, Z.; Yang, S.; Cui, B.; Peng, F. A direct DC-link boost voltage PID-like fuzzy control strategy in Z-source inverter. In Proceedings of the 2008 IEEE Power Electronics Specialists Conference, Rhodes, Greece, 15–19 June 2008; pp. 405–411. [Google Scholar] [CrossRef]
- Shinde, U.K.; Kadwane, S.G.; Gawande, S.P.; Reddy, M.J.B.; Mohanta, D.K. Sliding Mode Control of Single-Phase Grid-Connected Quasi-Z-Source Inverter. IEEE Access 2017, 5, 10232–10240. [Google Scholar] [CrossRef]
- Bayhan, S.; Komurcugil, H. A Sliding-Mode Controlled Single-Phase Grid-Connected Quasi-Z-Source NPC Inverter with Double-Line Frequency Ripple Suppression. IEEE Access 2019, 7, 160004–160016. [Google Scholar] [CrossRef]
- Khajesalehi, J.; Tavakoli, M.R.; Mahmoodi, A.; Afjei, E. Adaptive harmonic elimination in a five level z-source inverter using artificial neural networks. In Proceedings of the 5th Annual International Power Electronics, Drive Systems and Technologies Conference (PEDSTC 2014), Tehran, Iran, 5–6 February 2014; pp. 255–260. [Google Scholar] [CrossRef]
- Rostami, H.; Khaburi, D.A. Neural networks controlling for both the DC boost and AC output voltage of Z-source inverter. In Proceedings of the 2010 1st Power Electronic Drive Systems Technologies Conference (PEDSTC), Tehran, Iran, 17–18 February 2010; pp. 135–140. [Google Scholar] [CrossRef]
- Ahmed, A.A.; Bakeer, A.; Alhelou, H.H.; Siano, P.; Mossa, M.A. A New Modulated Finite Control Set-Model Predictive Control of Quasi-Z-Source Inverter for PMSM Drives. Electronics 2021, 10, 2814. [Google Scholar] [CrossRef]
- Bayhan, S.; Abu-Rub, H.; Balog, R.S. Model Predictive Control of Quasi-Z-Source Four-Leg Inverter. IEEE Trans. Ind. Electron. 2016, 63, 4506–4516. [Google Scholar] [CrossRef]
- Mo, W.; Loh, P.C.; Blaabjerg, F. Model predictive control for Z-source power converter. In Proceedings of the 8th International Conference on Power Electronics—ECCE Asia, Jeju, Korea, 30 May–3 June 2011; pp. 3022–3028. [Google Scholar] [CrossRef]
- Xu, Y.; He, Y.; Li, S. Logical Operation-Based Model Predictive Control for Quasi-Z-Source Inverter without Weighting Factor. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 1039–1051. [Google Scholar] [CrossRef]
- Ayad, A.; Kennel, R. Direct model predictive control of quasi-Z-source inverter compared with the traditional PI-based PWM control. In Proceedings of the 2015 17th European Conference on Power Electronics and Applications (EPE’15 ECCE-Europe), Geneva, Switzerland, 8–10 September 2015; pp. 1–9. [Google Scholar] [CrossRef]
- Maurelia, E.; Espinoza, J.R.; Silva, C.A.; Rojas, C.A.; Melín, P.E.; Espinosa, E.E. An Operating Condition-Based Scheme to Alternate Between Control Strategies for Improved Steady-State and Transient Behavior. IEEE Trans. Ind. Inform. 2015, 11, 1246–1254. [Google Scholar] [CrossRef]
- Ramírez, R.O.; Espinoza, J.R.; Villarroel, F.; Maurelia, E.; Reyes, M.E. A Novel Hybrid Finite Control Set Model Predictive Control Scheme with Reduced Switching. IEEE Trans. Ind. Electron. 2014, 61, 5912–5920. [Google Scholar] [CrossRef]
- Wu, S.T.; Chen, F.Y.; Chien, M.C.; Wang, J.M.; Su, Y.Y. A Hybrid Control Scheme with Fast Transient and Low Harmonic for Boost PFC Converter. Electronics 2021, 10, 1848. [Google Scholar] [CrossRef]
- Liu, Y.; Abu-Rub, H.; Ge, B.; Blaabjerg, F.; Ellabban, O.; Loh, P.C. Modulation Methods and Comparison. In Impedance Source Power Electronic Converters; Wiley-IEEE Press: New York, NY, USA, 2016; pp. 54–73. [Google Scholar]
- Liu, Y.; Abu-Rub, H.; Ge, B.; Blaabjerg, F.; Ellabban, O.; Loh, P.C. Voltage-Fed Z-Source/Quasi-Z-Source Inverters. In Impedance Source Power Electronic Converters; Wiley-IEEE Press: New York, NY, USA, 2016; pp. 20–34. [Google Scholar]
- Ellabban, O.; Van Mierlo, J.; Lataire, P. A DSP-Based Dual-Loop Peak DC-link Voltage Control Strategy of the Z-Source Inverter. IEEE Trans. Power Electron. 2012, 27, 4088–4097. [Google Scholar] [CrossRef]
- Lee, K.W.; Kim, T. Operating-point insensitive voltage control of the Z-source inverter based on an indirect capacitor current control. IET Power Electron. 2015, 8, 1358–1366. [Google Scholar] [CrossRef]
- Teodorescu, R.; Blaabjerg, F.; Liserre, M.; Loh, P. Proportional-resonant controllers and filters for grid-connected voltage-source converters. IEE Proc.-Electr. Power Appl. 2006, 153, 750–762. [Google Scholar] [CrossRef] [Green Version]
- Nowak, M.; Binkowski, T.; Piróg, S. Proportional-Resonant Controller Structure with Finite Gain for Three-Phase Grid-Tied Converters. Energies 2021, 14, 6726. [Google Scholar] [CrossRef]
- Baier, C.R.; Torres, M.A.; Muñoz, J.; Guzman, J.I.; Melin, P.E.; Rothen, J.; Rivera, M. d-q-DC reference frame control strategy for single-phase current source cascaded inverters. In Proceedings of the IECON 2014—40th Annual Conference of the IEEE Industrial Electronics Society, Dallas, TX, USA, 29 October–1 November 2014; pp. 4615–4621. [Google Scholar] [CrossRef]
- Ciobotaru, M.; Teodorescu, R.; Blaabjerg, F. Control of single-stage single-phase PV inverter. In Proceedings of the 2005 European Conference on Power Electronics and Applications, Dresden, Germany, 11–14 September 2005; pp. 1–10. [Google Scholar] [CrossRef]
- Vazquez, S.; Leon, J.I.; Franquelo, L.G.; Rodriguez, J.; Young, H.A.; Marquez, A.; Zanchetta, P. Model Predictive Control: A Review of Its Applications in Power Electronics. IEEE Ind. Electron. Mag. 2014, 8, 16–31. [Google Scholar] [CrossRef]
- Sun, D.; Ge, B.; Yan, X.; Abu-Rub, H.; Bi, D.; Peng, F.Z. Impedance design of quasi-Z source network to limit double fundamental frequency voltage and current ripples in single-phase quasi-Z source inverter. In Proceedings of the 2013 IEEE Energy Conversion Congress and Exposition, Denver, CO, USA, 15–19 September 2013; pp. 2745–2750. [Google Scholar] [CrossRef]
- Karamanakos, P.; Geyer, T. Guidelines for the Design of Finite Control Set Model Predictive Controllers. IEEE Trans. Power Electron. 2020, 35, 7434–7450. [Google Scholar] [CrossRef]
- Pereira, L.F.A.; Bazanella, A.S. Tuning Rules for Proportional Resonant Controllers. IEEE Trans. Control Syst. Technol. 2015, 23, 2010–2017. [Google Scholar] [CrossRef]
- Alcalá, J.; Bárcenas, E.; Cárdenas, V. Practical methods for tuning PI controllers in the DC-link voltage loop in Back-to-Back power converters. In Proceedings of the 12th IEEE International Power Electronics Congress, San Luis Potosi, Mexico, 22–25 August 2010; pp. 46–52. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | State | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| 1 | 1 | 0 | 0 | 1 | 1 | 0 | |||
| 2 | 0 | 1 | 1 | 0 | −1 | 0 | |||
| 3 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | ||
| 0 | 1 | 0 | 1 | 0 | 0 | 0 | |||
| 4 | 1 | 1 | 1 | 1 | 0 | 1 | 0 | 0 |
| Variables | Description | Values |
|---|---|---|
| Source voltage | ||
| & | qZSN inductors | |
| & | qZSN capacitors | |
| Resistance load | ||
| Inductor load | ||
| Output frequency | ||
| Voltage reference 1st step | 40 V | |
| Voltage reference 2nd step | 65 V | |
| Current ac side reference | 1.8 A |
| Variables | Description | Values |
|---|---|---|
| Sampling frequency for FCS-MPC and PI-PI-PR | ||
| PWM carrier frequency for PI-PI-PR | ||
| Weighting factor qZSN. Inductor current prediction | 1 | |
| Weighting factor qZSN. Capacitor voltage prediction | ||
| Weighting factor ac load current prediction | ||
| Proportional gain capacitor voltage loop | ||
| Integral time capacitor voltage loop | 0.02 s | |
| Proportional gain inductor current loop | ||
| Integral time inductor current Loop | 0.0005 s | |
| Proportional gain PR loop | 100 | |
| Resonance gain PR loop | 800 | |
| Resonance frequency |
| Variables | Description | Values |
|---|---|---|
| Error reference band | ||
| Error reference hysteresis band |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Diaz-Bustos, M.; Baier, C.R.; Torres, M.A.; Melin, P.E.; Acuna, P. Application of a Control Scheme Based on Predictive and Linear Strategy for Improved Transient State and Steady-State Performance in a Single-Phase Quasi-Z-Source Inverter. Sensors 2022, 22, 2458. https://doi.org/10.3390/s22072458
Diaz-Bustos M, Baier CR, Torres MA, Melin PE, Acuna P. Application of a Control Scheme Based on Predictive and Linear Strategy for Improved Transient State and Steady-State Performance in a Single-Phase Quasi-Z-Source Inverter. Sensors. 2022; 22(7):2458. https://doi.org/10.3390/s22072458
Chicago/Turabian StyleDiaz-Bustos, Manuel, Carlos R. Baier, Miguel A. Torres, Pedro E. Melin, and Pablo Acuna. 2022. "Application of a Control Scheme Based on Predictive and Linear Strategy for Improved Transient State and Steady-State Performance in a Single-Phase Quasi-Z-Source Inverter" Sensors 22, no. 7: 2458. https://doi.org/10.3390/s22072458