Innovative Head-Mounted System Based on Inertial Sensors and Magnetometer for Detecting Falling Movements

 , and
, and
Abstract
:
1. Introduction
2. Materials and Methods
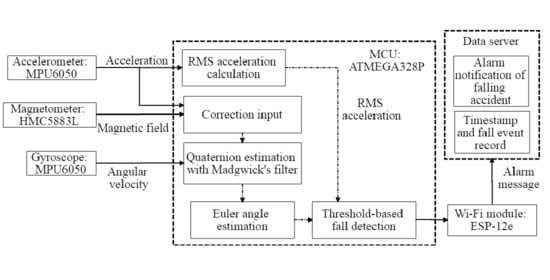
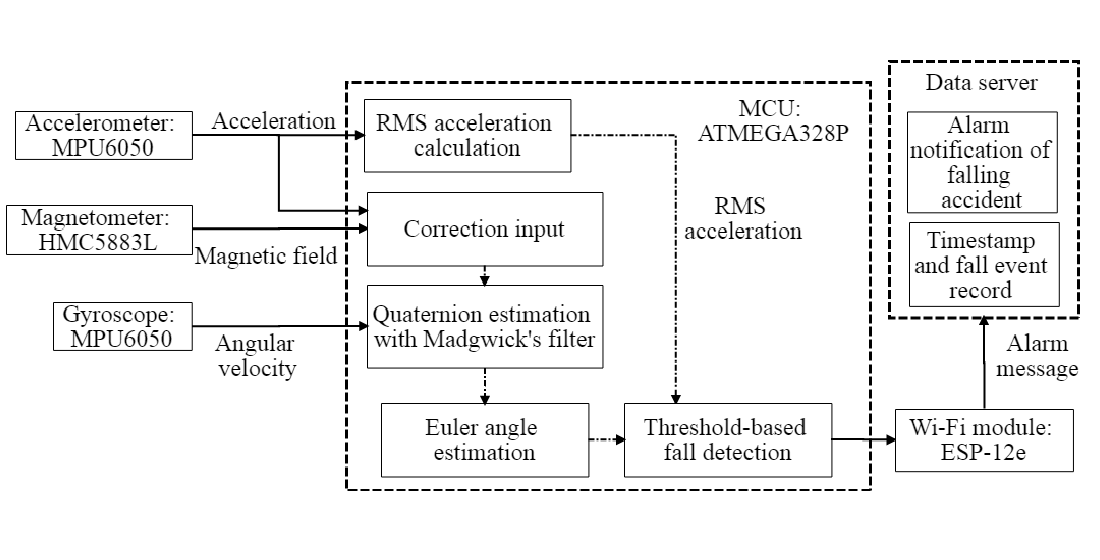
2.1. Structure of Proposed System
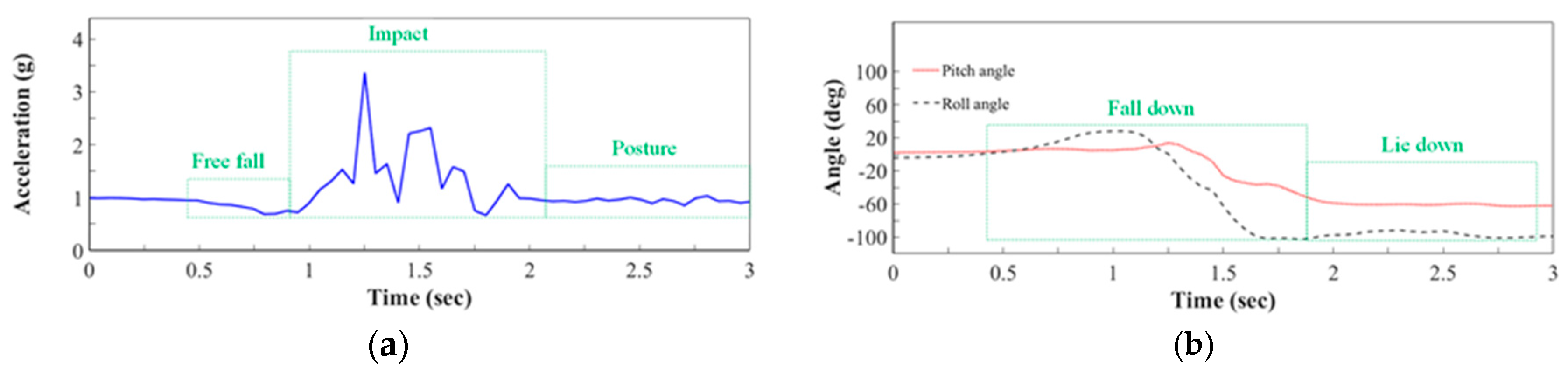
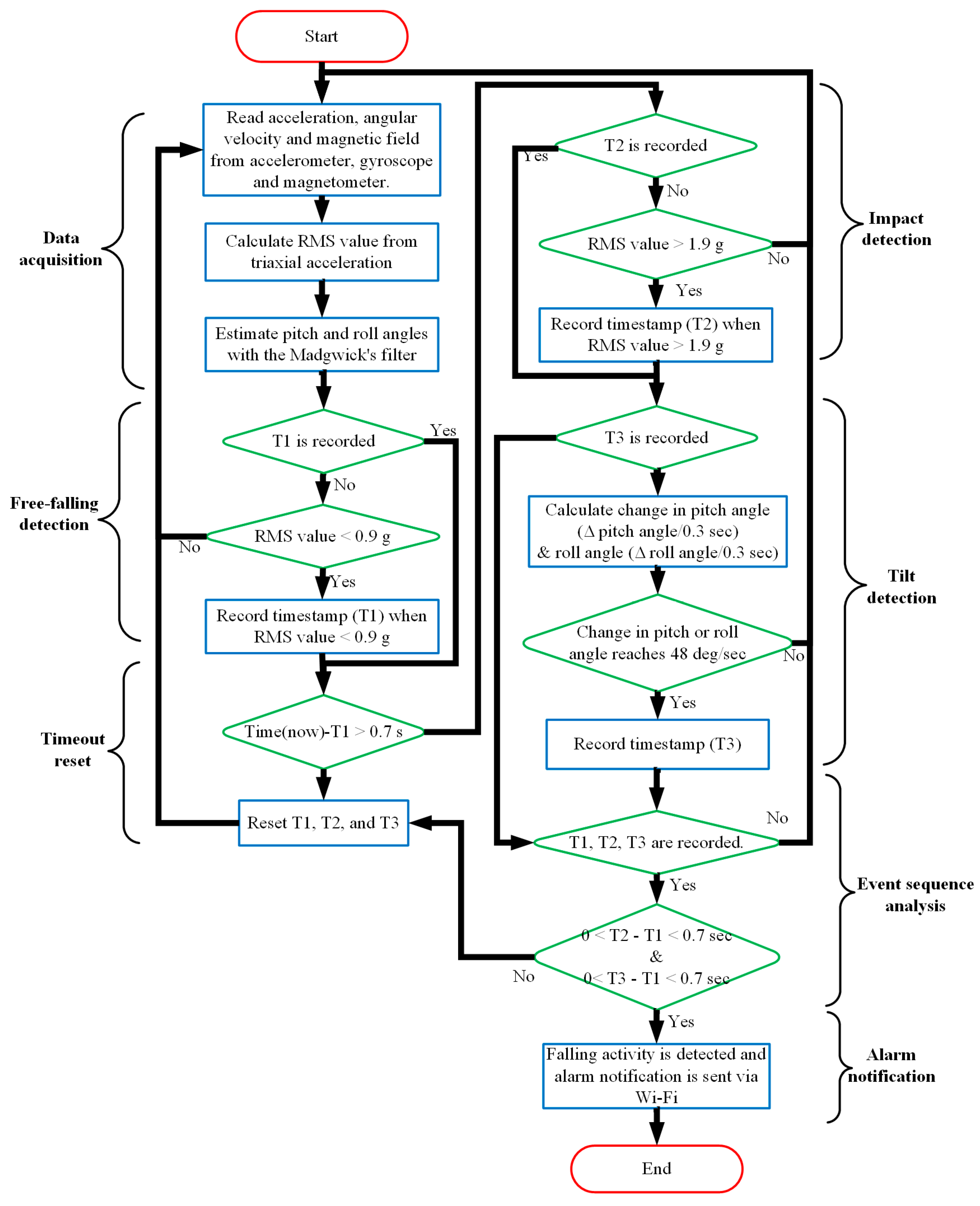
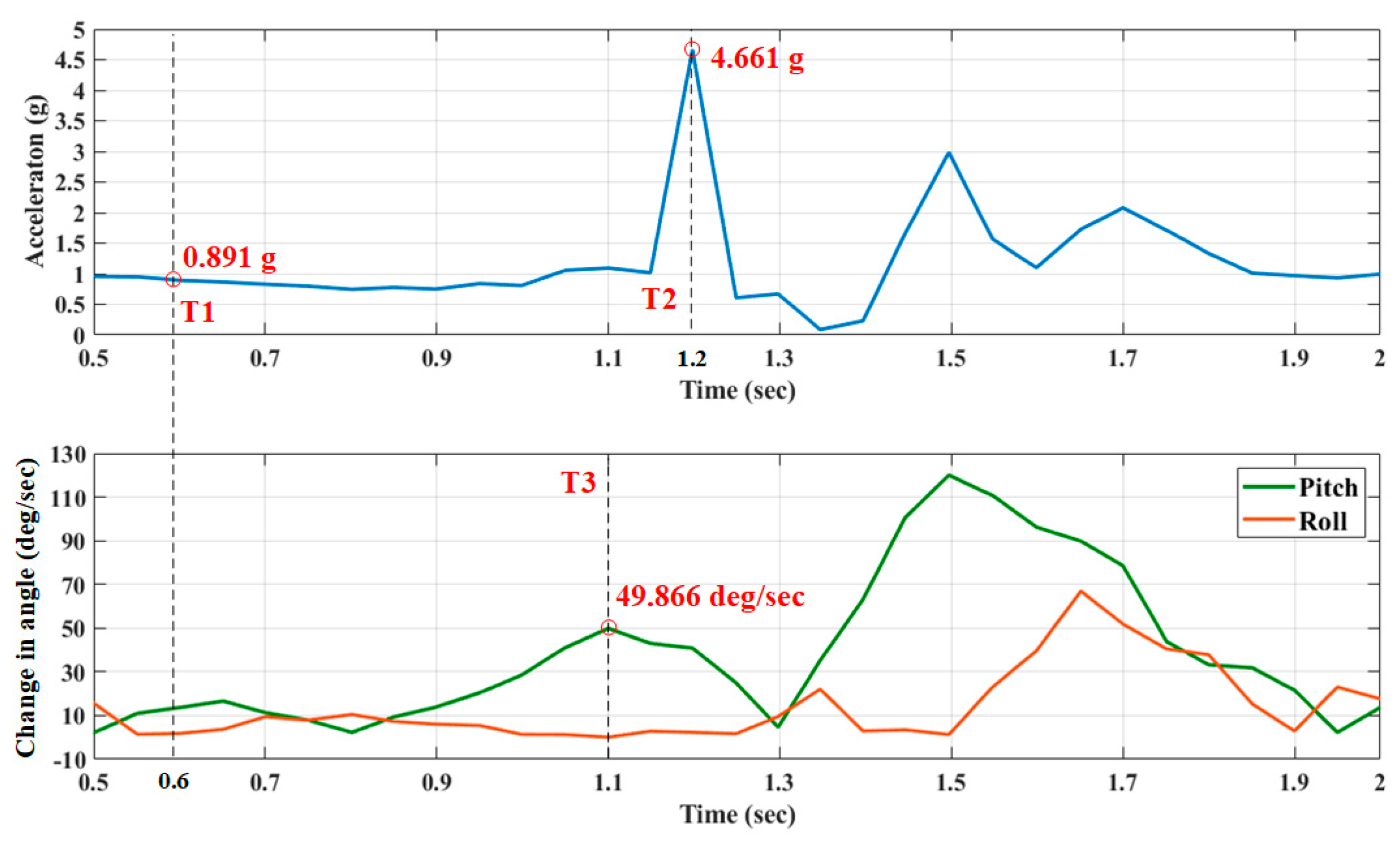
2.2. Fall Detection Scheme
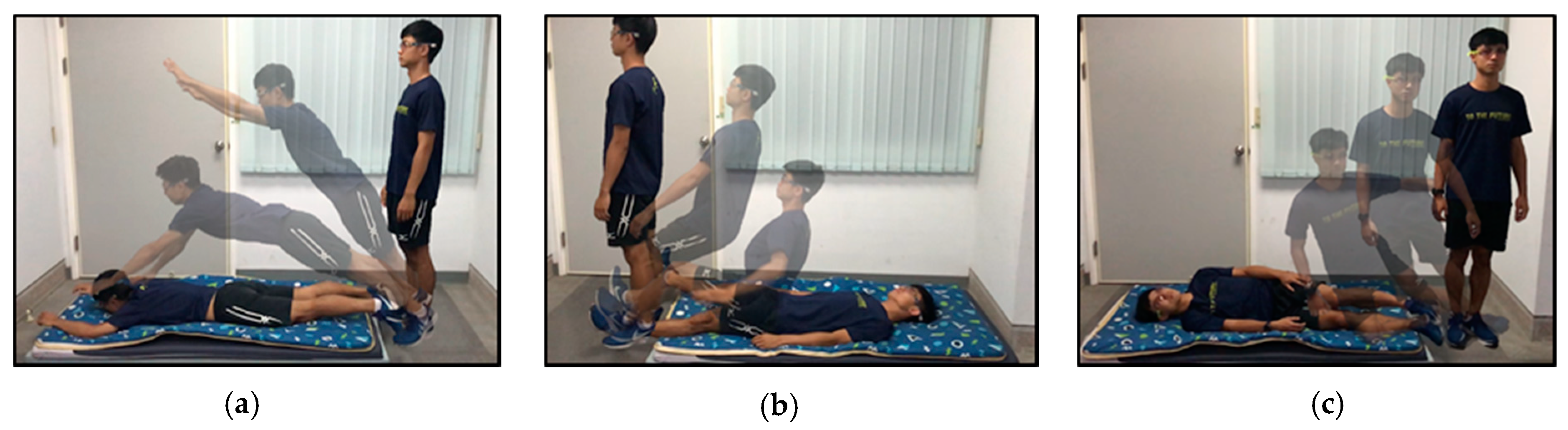
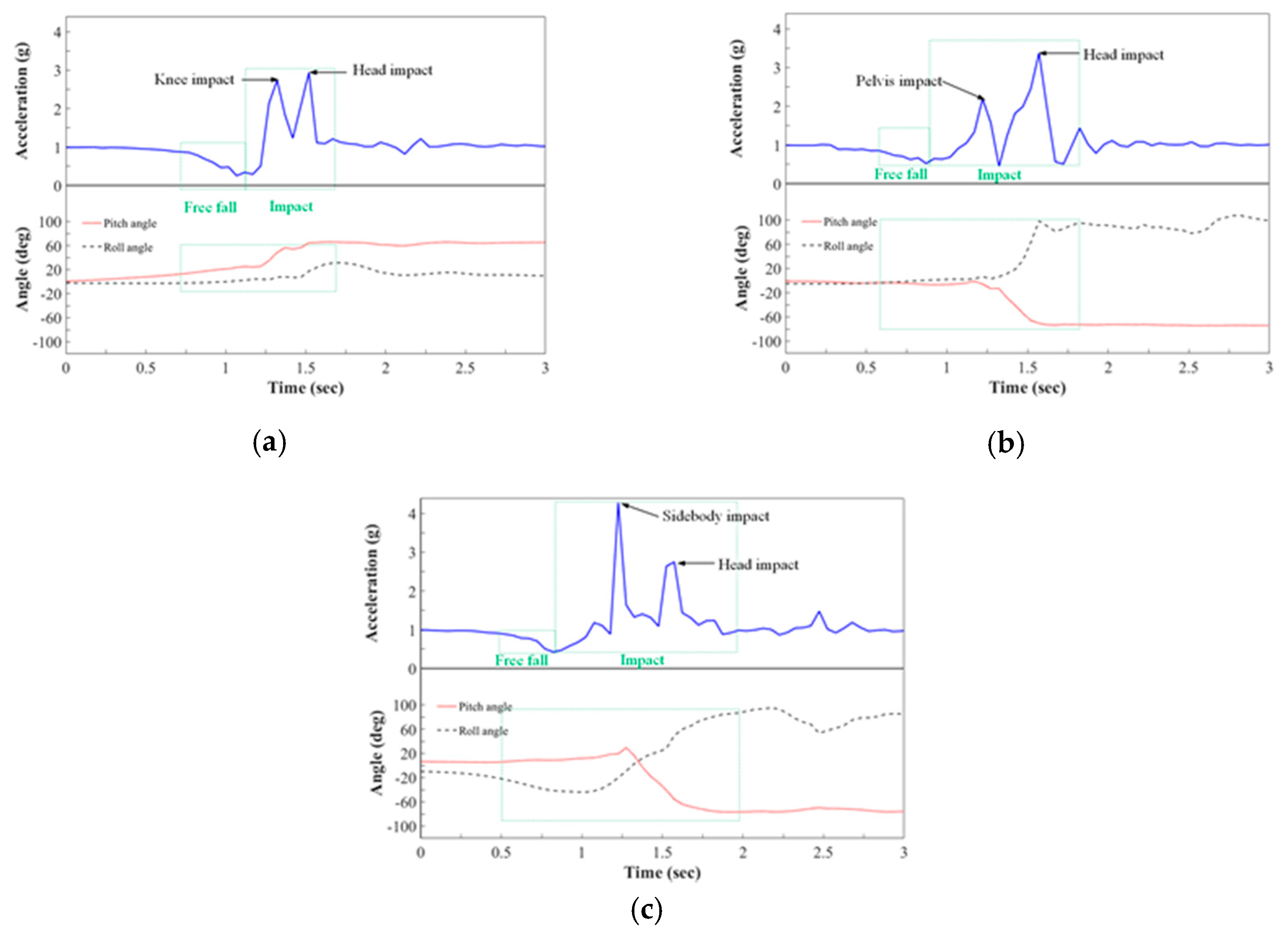
2.3. Falling and ADL Experimental Protocol
2.4. Evaluation Metrics
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Yu, M.; Rhuma, A.; Naqvi, S.M.; Wang, L.; Chambers, J. A Posture Recognition-based Fall detection System for Monitoring an Elderly Person in a Smart Home Environment. IEEE Trans. Inf. Technol. Biomed. 2012, 16, 1274–1286. [Google Scholar]
- Li, Y.; Ho, K.C.; Popescu, M. A Microphone Array System for Automatic Fall Detection. IEEE Trans. Biomed. Eng. 2012, 59, 1291–1301. [Google Scholar] [PubMed]
- Li, Y.; Ho, K.C.; Popescu, M. Efficient Source Separation Algorithms for Acoustic Fall Detection Using a Microsoft Kinect. IEEE Trans. Biomed. Eng. 2014, 61, 745–755. [Google Scholar] [CrossRef] [PubMed]
- Palmerini, L.; Bagalà, F.; Zanetti, A.; Klenk, J.; Becker, C.; Cappello, A. A Wavelet-Based Approach to Fall Detection. Sensors 2015, 15, 11575–11586. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sabatini, A.M.; Ligorio, G.; Mannini, A.; Genovese, V.; Pinna, L. Prior-to- and Post-Impact Fall Detection Using Inertial and Barometric Altimeter Measurements. IEEE Trans. Neural Syst. Rehabil. Eng. 2016, 24, 774–783. [Google Scholar] [CrossRef]
- Yuan, J.; Tan, K.K.; Lee, T.H.; Koh, G.C.H. Power-Efficient Interrupt-Driven Algorithms for Fall Detection and Classification of Activities of Daily Living. IEEE Sens. J. 2015, 15, 1377–1387. [Google Scholar] [CrossRef]
- Casilari, E.; Oviedo-Jiménez, M.A. Automatic fall detection system based on the combined use of a smartphone and a smartwatch. PLoS ONE 2015, 10, e0140929. [Google Scholar] [CrossRef]
- Bian, Z.P.; Hou, J.; Chau, L.P.; Magnenat-Thalmann, N. Fall detection based on body part tracking using a depth camera. IEEE J. Biomed. Health Inform. 2015, 19, 430–439. [Google Scholar] [CrossRef]
- Kau, L.J.; Chen, C.S. A smart phone-based pocket fall accident detection, positioning, and rescue system. IEEE J. Biomed. Health Inform. 2015, 19, 44–56. [Google Scholar] [CrossRef]
- Cheffena, M. Fall detection using smartphone audio features. IEEE J. Biomed. Health Inform. 2016, 20, 1073–1080. [Google Scholar] [CrossRef]
- Feng, G.; Mai, J.; Ban, Z.; Guo, X.; Wang, G. Floor pressure imaging for fall detection with fiber-optic sensors. IEEE Pervasive Comput. 2016, 15, 40–47. [Google Scholar] [CrossRef]
- Daher, M.; Diab, A.; Najjar, M.E.B.E.; Khalil, M.A.; Charpillet, F. Elder tracking and fall detection system using smart tiles. IEEE Sens. J. 2017, 17, 469–479. [Google Scholar] [CrossRef]
- Bagalà, F.; Becker, C.; Cappello, A.; Chiari, L.; Aminian, K.; Hausdorff, J.M.; Zijlstra, W.; Klenk, J. Evaluation of accelerometer-based fall detection algorithms on real-world falls. PLoS ONE 2012, 7, e37062. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Finlay, C.C.; Maus, S.; Beggan, C.D.; Bondar, T.N.; Chambodut, A.; Chernova, T.A.; Chulliat, A.; Golovkov, V.P.; Hamilton, B.; Hamoudi, M.; et al. International Geomagnetic Reference Field: The eleventh generation. Geophys. J. Int. 2010, 183, 1216–1230. [Google Scholar]
- Gómez-Espinosa, A.; Espinosa-Castillo, N.; Valdés-Aguirre, B. Foot-Mounted Inertial Measurement Units-Based Device for Ankle Rehabilitation. Appl. Sci. 2018, 8, 2032. [Google Scholar] [CrossRef] [Green Version]
- Boser, B.E. Electronics for Micromachined Inertial Sensors. In Proceedings of the International Solid State Sensors and Actuators Conference (Transducers’ 97), Chicago, IL, USA, 19–19 June 1997; pp. 1169–1172. [Google Scholar]
- Ash, M.E.; Trainor, C.V.; Elliott, R.D.; Borenstein, J.T.; Kourepenis, A.S.; Ward, P.A.; Weinberg, M.S. Micromechanical Inertial Sensor Development at Draper Laboratory with Recent Test Results. In Proceedings of the Symposium Gyro Technology 1999, Stuttgart, Germany, 14–15 September 1999; p. 3. [Google Scholar]
- Lenz, J.; Edelstein, A.S. Magnetic Sensors and Their Applications. IEEE Sens. J. 2006, 6, 631–649. [Google Scholar] [CrossRef]
- Madgwick, S.O.H.; Harrison, A.J.L.; Vaidyanathan, R. Estimation of IMU and MARG Orientation Using a Gradient Descent Algorithm. In Proceedings of the 2011 IEEE International Conference on Rehabilitation Robotics, Zurich, Switzerland, 29 June–1 July 2011. [Google Scholar]
- Cheng, W.C.; Jhan, D.M. Triaxial Accelerometer-based Fall Detection Method Using a Self-constructing Cascade-adaboost-SVM classifier. IEEE J. Biomed. Health Inform. 2013, 17, 411–419. [Google Scholar] [CrossRef]
- Shahzad, A.; Ko, S.; Lee, S.; Lee, J.A.; Kim, K. Quantitative assessment of balance impairment for fall-risk estimation using wearable triaxial accelerometer. IEEE Sens. J. 2017, 17, 6743–6751. [Google Scholar] [CrossRef]
- O-larnnithipong, N.; Barreto, A. Gyroscope Drift Correction Algorithm for Inertial Measurement Unit Used in Hand Motion Tracking. In Proceedings of the 2016 IEEE SENSORSO, Rlando, FL, USA, 30 October–3 November 2016. [Google Scholar]
- Sabatini, A.M. Quaternion-based Extended Kalman filter for Determining Orientation by Inertial and Magnetic Sensing. IEEE Trans. Biomed. Eng. 2006, 53, 1346–1356. [Google Scholar] [CrossRef]
- Del Rosario, M.B.; Lovell, N.H.; Redmond, S.J. Quaternion-Based Complementary Filter for Attitude Determination of a Smartphone. IEEE Sens. J. 2016, 16, 6008–6017. [Google Scholar] [CrossRef]
- Justa, J.; Šmídl, V.; Hamáček, A. Fast AHRS Filter for Accelerometer, Magnetometer, and Gyroscope Combination with Separated Sensor Corrections. Sensors 2020, 20, 3824. [Google Scholar] [CrossRef] [PubMed]
- Valenti, R.G.; Dryanovski, I.; Xiao, J. Keeping a Good Attitude: A Quaternion-Based Orientation Filter for IMUs and MARGs. Sensors 2015, 15, 19302–19330. [Google Scholar] [CrossRef] [PubMed]
- Feng, K.; Li, J.; Zhang, X.; Shen, C.; Bi, Y.; Zheng, T.; Liu, J. A New Quaternion-Based Kalman Filter for Real-Time Attitude Estimation Using the Two-Step Geometrically-Intuitive Correction Algorithm. Sensors 2017, 17, 2146. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xu, D.; Xia, Y.; Mandic, D.P. Optimization in Quaternion Dynamic Systems: Gradient, Hessian, and Learning Algorithms. IEEE Trans. Neural Netw. Learn. Syst. 2016, 27, 249–261. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, J.; Li, T.; Luo, X.; Shi, Y.; Jha, S.K. Identifying Computer Generated Images Based on Quaternion Central Moments in Color Quaternion Wavelet Domain. IEEE Trans. Circuits Syst. Video Technol. 2019, 29, 2775–2785. [Google Scholar] [CrossRef]
- Abbasi-Kesbi, R.; Nikfarjam, A. A Miniature Sensor System for Precise Hand Position Monitoring. IEEE Sens. J. 2018, 18, 2577–2584. [Google Scholar] [CrossRef]
- Fluss, R.; Faraggi, D.; Reiser, B. Estimation of the Youden Index and Its Associated Cutoff Point. Biom. J. 2005, 47, 458–472. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kim, H.; Hong, T.; Kim, J. Automatic Ventilation Control Algorithm Considering the Indoor Environmental Quality Factors and Occupant Ventilation Behavior Using a Logistic Regression Model. Build. Environ. 2019, 153, 46–59. [Google Scholar] [CrossRef]
- Hussain, F.; Hussain, F.; Ehatisham-ul-Haq, M.; Azam, M.A. Activity-Aware Fall Detection and Recognition Based on Wearable Sensors. IEEE Sens. J. 2019, 19, 4528–4536. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component Name | Manufacturer | Specifications and Configuration | |
|---|---|---|---|
| MCU | ATMEGA328P-MU | Atmel, San Jose, CA, USA | Internal resistance–capacitance oscillator at 8 MHz |
| Accelerometer | MPU6050 | InvenSense, San Jose, CA, USA | Full-scale range: Accelerometer: ± 16 g Gyroscope: ± 2000°/s I2C speed: 400 kHz |
| Gyroscope | |||
| Magnetometer | HMC5883L | Honeywell Aerospace, Phoenix, AZ, USA | Field range: ± 0.9 G I2C speed: 400 kHz |
| Wi-Fi module | ESP8266 (ESP-12e) | Expressif, Shanghai, China | Standard: IEEE 802.11b/g/n Bandrate: 115,200 bits/s |
| Regulator | MIC5219 | Microchip, Chandler, AZ, USA | Regulated voltage: 3.3 V Maximal current: 500 mA |
| Bi-ion battery | 702030 | - | Capacity: 400 mAh Size: 20 mm × 30 mm × 7 mm |
| Battery charger | TP4056 | TPower Semiconductor, Shenzhen, China | Charging current: 500 mA |
| Component | Mode | Current Consumption | Period |
|---|---|---|---|
| MCU | Active mode | 3.58 mA (3.3 V @ 8 MHz) | 20 ms out of every 50 ms |
| Sleep mode with watchdog timer enabled | 4.5 µA (3.3 V @ 8 MHz) | 30 ms out of every 50 ms | |
| Accelerometer | Low-power mode | 60 µA (20 Hz sampling rate) | Always on |
| Gyroscope | Normal operation mode | 3.60 mA | Always on |
| Magnetometer | Normal operation mode | 100 µA | Always on |
| Wi-Fi module | Transmission mode (Tx 802.11n, −65 dBm) | 120 mA | 100 ms out of every 600 s |
| Power down mode | 0.5 µA | 599.9 s out of every 600 s |
| Falling Movements | Forward Fall | At First Kneeling Down, Ending up Lying Down. |
|---|---|---|
| Backward Fall | At First Impacting on Pelvis, Ending up Lying Down. | |
| Lateral Fall | Ending up Lying Down. | |
| Activities of daily living (ADLs) | Running | |
| Jumping | ||
| Forward Fall | Backward Fall | Lateral Fall | Run | Jump | |
|---|---|---|---|---|---|
| Subject 1 | 16/16 | 14/16 | 16/16 | 50/50 | 50/50 |
| Subject 2 | 16/16 | 16/16 | 16/16 | 50/50 | 48/50 |
| Subject 3 | 13/16 | 16/16 | 16/16 | 50/50 | 50/50 |
| Subject 4 | 16/16 | 16/16 | 16/16 | 50/50 | 50/50 |
| Subject 5 | 14/16 | 16/16 | 16/16 | 48/50 | 43/50 |
| Subject 6 | 8/16 | 16/16 | 16/16 | 50/50 | 50/50 |
| Subject 7 | 16/16 | 16/16 | 16/16 | 49/50 | 49/50 |
| Subject 8 | 16/16 | 16/16 | 16/16 | 47/50 | 48/50 |
| Subject 9 | 16/16 | 16/16 | 16/16 | 50/50 | 48/50 |
| Subject 10 | 10/16 | 16/16 | 15/16 | 50/50 | 50/50 |
| Subject 11 | 15/16 | 15/16 | 16/16 | 49/50 | 50/50 |
| Subject 12 | 16/16 | 16/16 | 16/16 | 50/50 | 50/50 |
| Subject 13 | 16/16 | 16/16 | 16/16 | 50/50 | 50/50 |
| Subject 14 | 16/16 | 16/16 | 16/16 | 49/50 | 46/50 |
| Subject 15 | 16/16 | 16/16 | 16/16 | 50/50 | 50/50 |
| Total | 220/240 | 237/240 | 239/240 | 742/750 | 732/750 |
| Ref. (Year) | Sensor Type | Sensor Location | Classifier | Sample Rate | Real-Time Detection | Performance |
|---|---|---|---|---|---|---|
| Palmerini, L. [4] (2015) | Accelerometer | Lower back | Wavelet analysis and threshold-based algorithm | 100 Hz | No | Sensitivity: 90% Specificity: 89.7% |
| Sabatini, A.M. [5] (2016) | Accelerometer Gyroscope Barometric | Right anterior iliac spine | Threshold-based algorithm | 50 Hz | Yes | Sensitivity: 80% Specificity: 100% |
| Hussain, F. [33] (2019) | Accelerometer Gyroscope | Waist | Machine-learning-based algorithm | 200 Hz | Yes | Sensitivity: 99.44% Specificity: 100% |
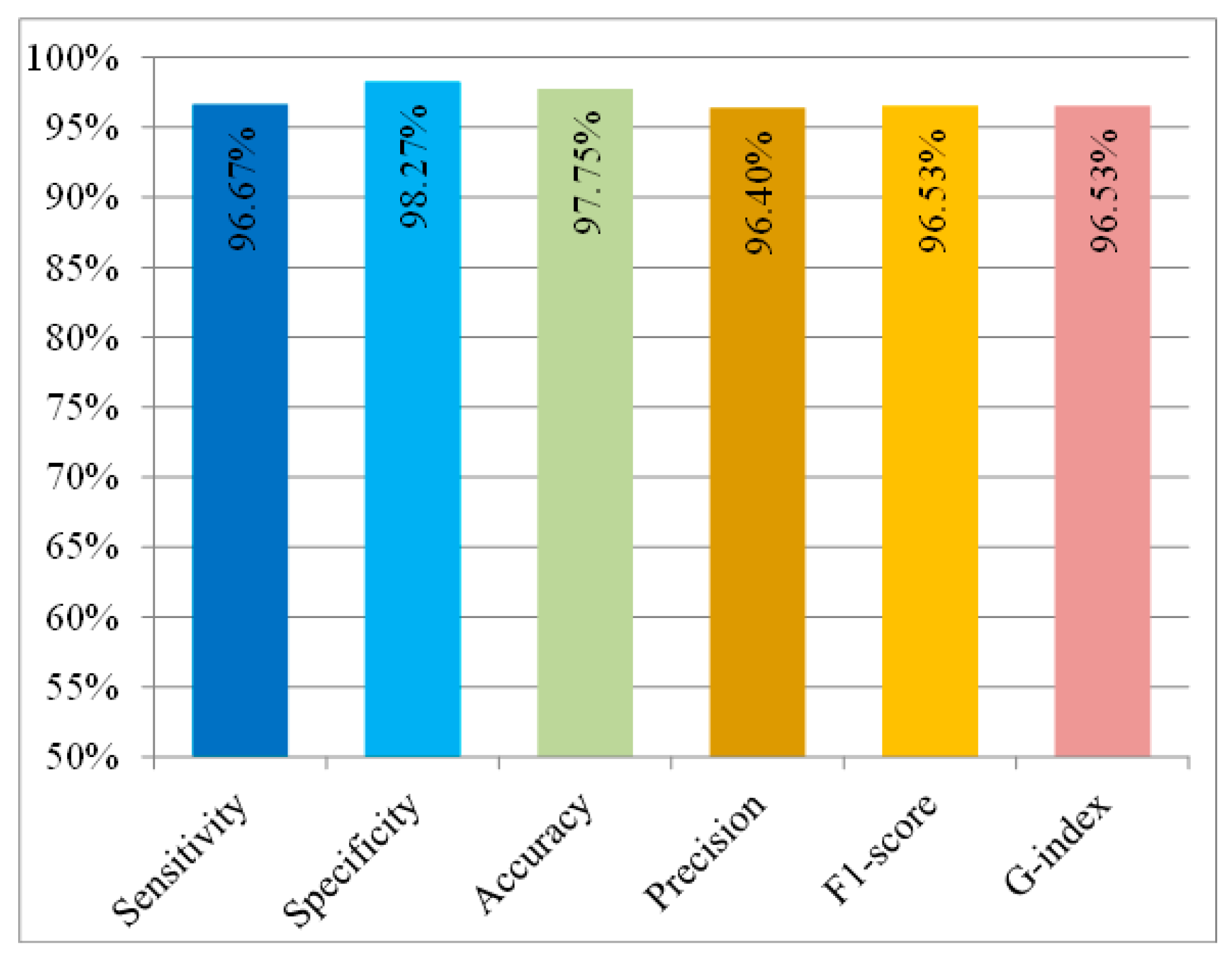
| Our work | Accelerometer Gyroscope Magnetometer | Head | Threshold-based algorithm | 20 Hz | Yes | Sensitivity: 96.67% Specificity: 98.27% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, C.-L.; Chiu, W.-C.; Chu, T.-C.; Ho, Y.-H.; Chen, F.-H.; Hsu, C.-C.; Hsieh, P.-H.; Chen, C.-H.; Lin, C.-C.K.; Sung, P.-S.; et al. Innovative Head-Mounted System Based on Inertial Sensors and Magnetometer for Detecting Falling Movements. Sensors 2020, 20, 5774. https://doi.org/10.3390/s20205774
Lin C-L, Chiu W-C, Chu T-C, Ho Y-H, Chen F-H, Hsu C-C, Hsieh P-H, Chen C-H, Lin C-CK, Sung P-S, et al. Innovative Head-Mounted System Based on Inertial Sensors and Magnetometer for Detecting Falling Movements. Sensors. 2020; 20(20):5774. https://doi.org/10.3390/s20205774
Chicago/Turabian StyleLin, Chih-Lung, Wen-Ching Chiu, Ting-Ching Chu, Yuan-Hao Ho, Fu-Hsing Chen, Chih-Cheng Hsu, Ping-Hsiao Hsieh, Chien-Hsu Chen, Chou-Ching K. Lin, Pi-Shan Sung, and et al. 2020. "Innovative Head-Mounted System Based on Inertial Sensors and Magnetometer for Detecting Falling Movements" Sensors 20, no. 20: 5774. https://doi.org/10.3390/s20205774