Refining Inaccurate Transmitter and Receiver Positions Using Calibration Targets for Target Localization in Multi-Static Passive Radar


Abstract
:1. Introduction
2. Problem Formulation
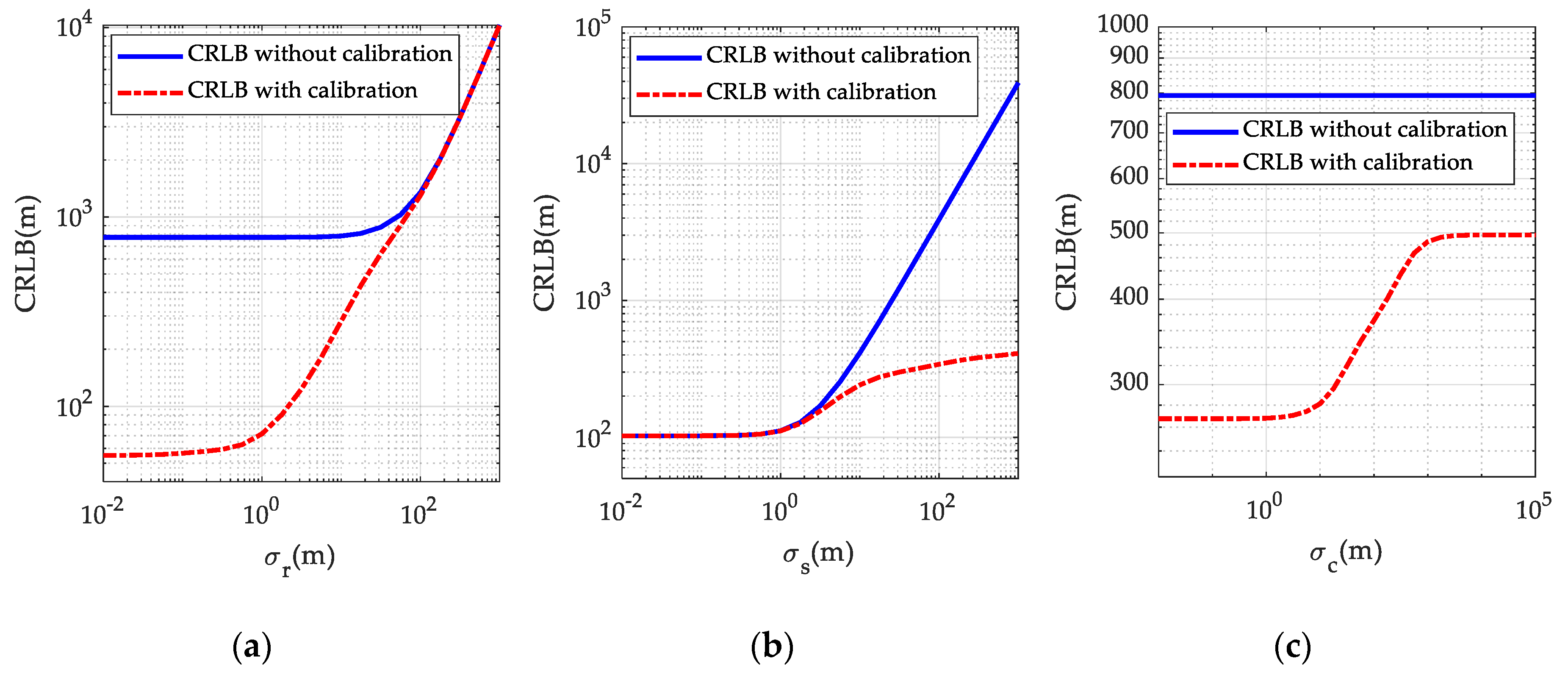
3. Evaluation of the CRLB with Calibration Targets
4. Proposed Localization Method
4.1. Algorithm Development
4.1.1. Calibration Stage
4.1.2. Localization Stage
4.2. Performance Analysis
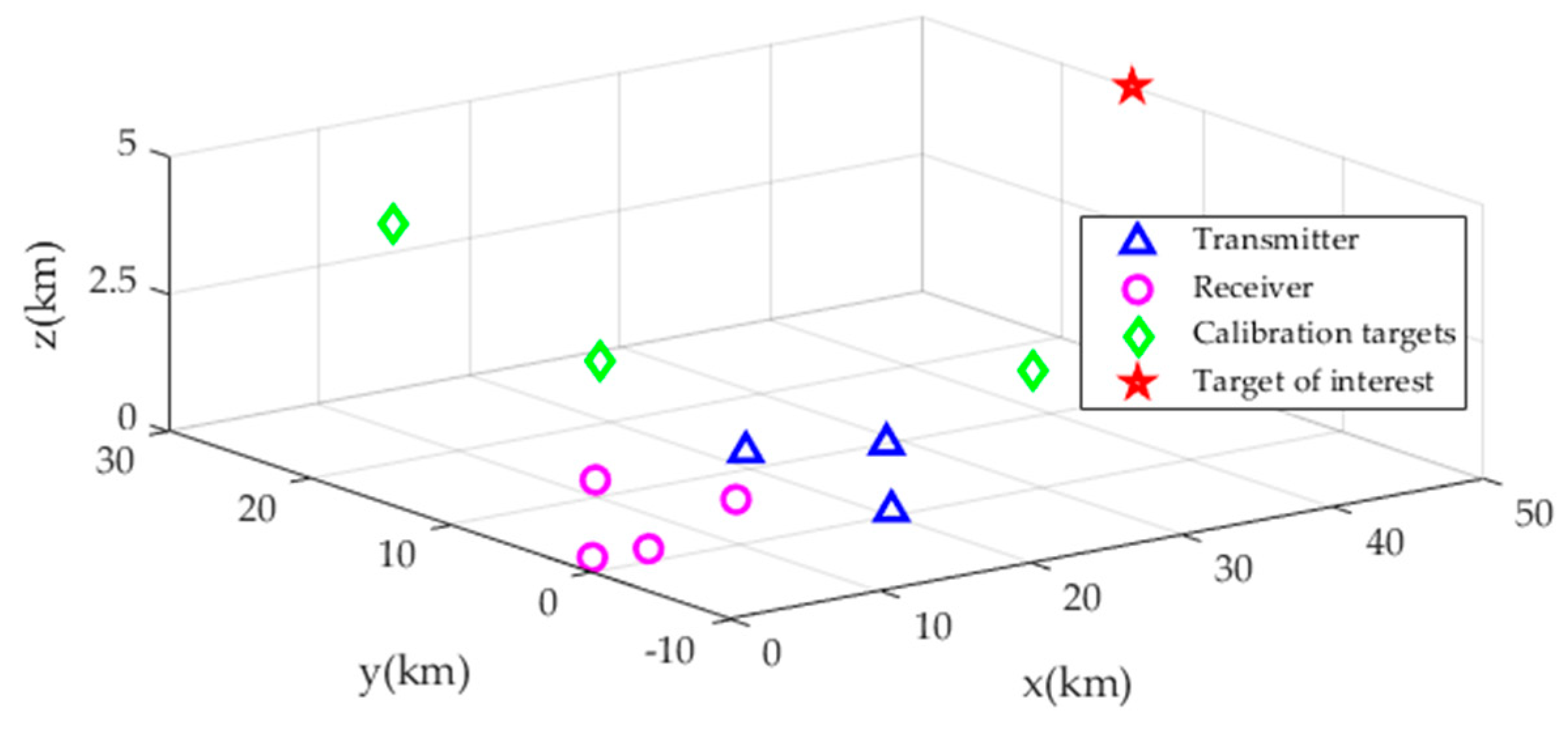
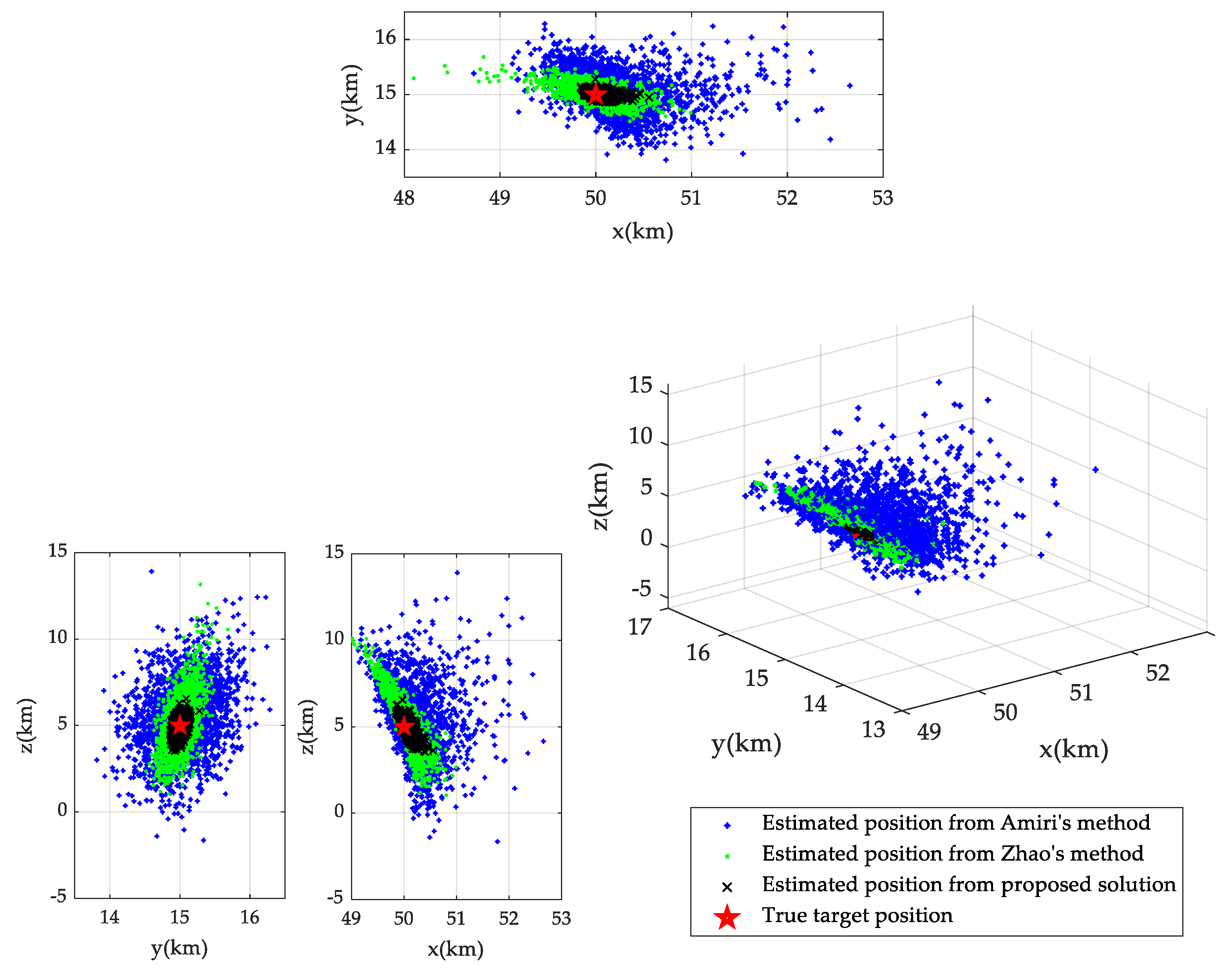
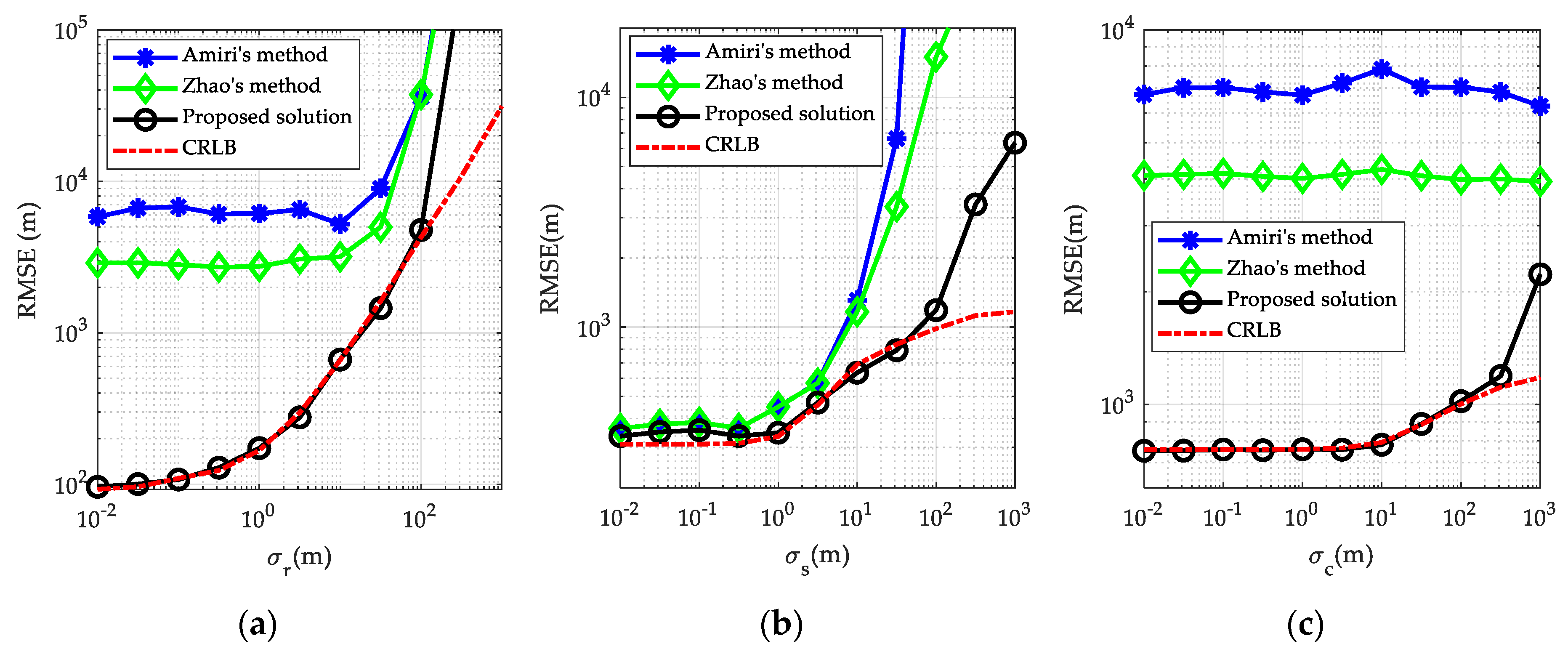
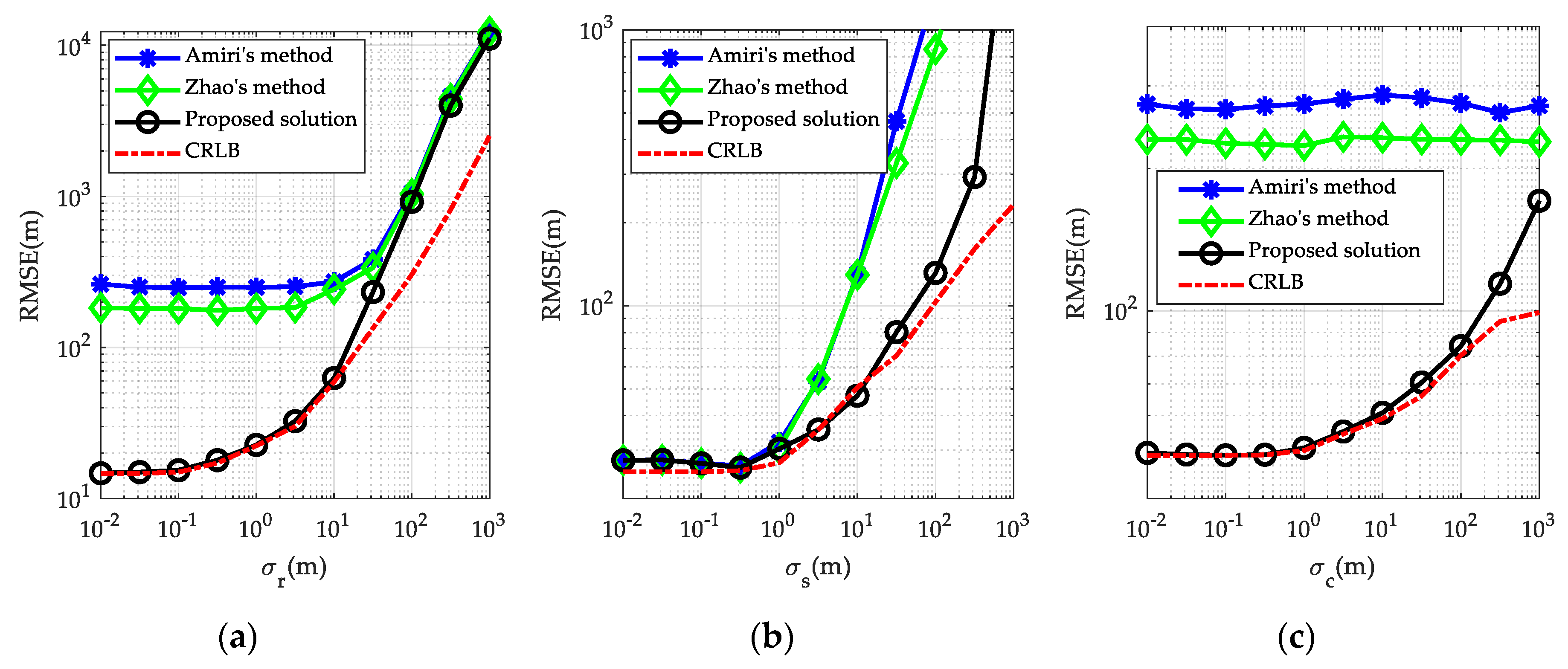
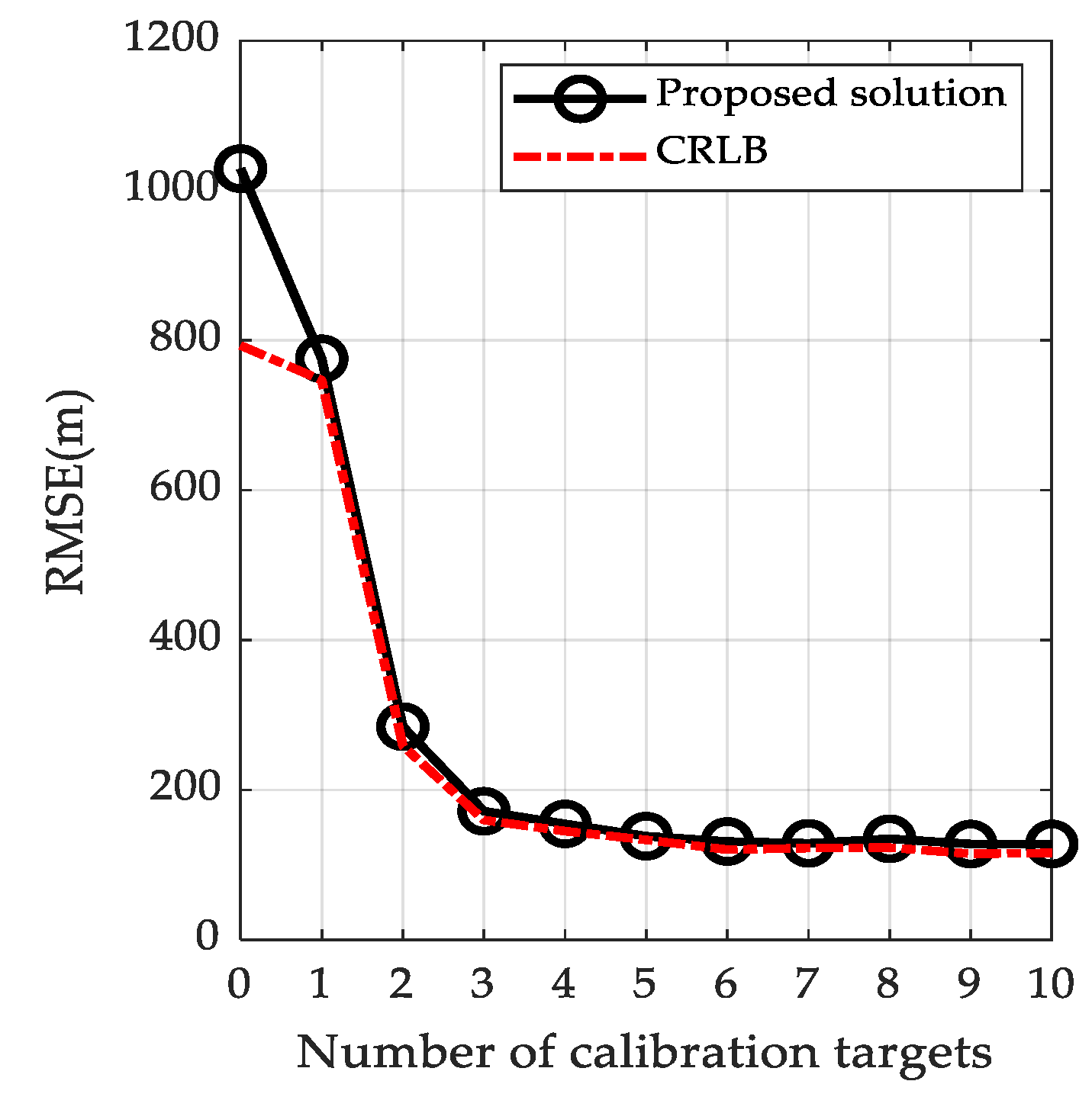
5. Simulation Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Edrich, M.; Meyer, F.; Schroeder, A. Design and performance evaluation of a mature FM/DAB/DVB-T multi-illuminator passive radar system. IET Radar Sonar Navig. 2014, 8, 114–122. [Google Scholar] [CrossRef]
- Tatiana, M.; Fabiola, C.; Enrico, T.; Annarita, D.L. Multi-Frequency Target Detection Techniques for DVB-T Based Passive Radar Sensors. Sensors 2016, 16, 1594–1618. [Google Scholar]
- Wang, Y.; Bao, Q.; Wang, D.; Chen, Z. An experimental study of passive bistatic radar using uncooperative radar as a transmitter. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1–5. [Google Scholar]
- Piotr, S.; Michał, W.; Kulpa, K. Trial Results on Bistatic Passive Radar Using Non-Cooperative Pulse Radar as Illuminator of Opportunity. Int. J. Electron. Telecommun. 2012, 58, 171–176. [Google Scholar]
- Olsen, K.E.; Asen, W. Bridging the gap between civilian and military passive radar. IEEE Aerosp. Electron. Syst. Mag. 2017, 32, 4–12. [Google Scholar] [CrossRef]
- Palmer, J.; Palumbo, S.; Summers, A.; Merrett, D.; Searle, S.; Howard, S. An overview of an illuminator of opportunity passive radar research project and its signal processing research directions. Digit. Signal Process. 2011, 21, 593–599. [Google Scholar] [CrossRef]
- Malanowski, M. Detection and parameter estimation of manoeuvring targets with passive bistatic radar. IET Radar Sonar Navig. 2012, 6, 739–745. [Google Scholar] [CrossRef]
- Feng, Y.; Sun, H.Y.; Liu, D.L.; Ma, Y.H. Target location based on quasi-Newton algorithm in multistatic passive radar. In Proceedings of the IET International Radar Conference, Hangzhou, China, 14–16 October 2015. [Google Scholar]
- Zhao, Y.S.; Zhao, Y.J.; Sun, D.; Zhao, C. Constrained total least squares localization algorithm for multistatic passive radar using bistatic range measurements, In Proceedings of the 19th International Radar Symposium (IRS), Bonn, Germany, 20–22 June 2018.
- Dianat, M.; Taban, M.R.; Dianat, J.; Sedighi, V. Target localisation using least squares estimation for MIMO radars with widely separated antennas. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 2730–2741. [Google Scholar] [CrossRef]
- Noroozi, A.; Sebt, M.A. Target localisation from bistatic range measurements in multi-transmitter multi-receiver passive radar. IEEE Signal Process. Lett. 2015, 22, 2445–2449. [Google Scholar] [CrossRef]
- Einemo, M.; So, H.C. Weighted least squares algorithm for target localisation in multi-static passive radar. Signal Process. 2015, 115, 144–150. [Google Scholar] [CrossRef]
- Park, C.H.; Chang, J.H. Closed-form localisation for multi-static passive radar systems using time delay measurements. IEEE Trans. Wirel. Commun. 2016, 15, 1480–1490. [Google Scholar] [CrossRef]
- Amiri, R.; Behnia, F.; Zamani, H. Asymptotically efficient target localisation from bistatic range measurements in Multi-static passive radars. IEEE Signal Process. Lett. 2017, 24, 299–303. [Google Scholar] [CrossRef]
- Chan, Y.T.; Ho, K.C. A simple and efficient estimator for hyperbolic location. IEEE Trans. Signal Process. 1994, 42, 1905–1915. [Google Scholar] [CrossRef]
- Dawidowicz, B.; Kulpa, K.S.; Malanowski, M.; Misiurewicz, J.; Samczynski, P.; Smolarczyk, M. DPCA Detection of Moving Targets in Airborne Passive Radar. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 1347–1357. [Google Scholar] [CrossRef]
- Brown, J.; Woodbridge, K.; Griffiths, H.; Stove, A. Passive bistatic radar experiments from an airborne platform. IEEE Aerosp. Electron. Syst. Mag. 2012, 27, 50–55. [Google Scholar] [CrossRef]
- Thompson, E.C. Bistatic radar noncooperative illumination synchronization techniques. In Proceedings of the IEEE National Radar Conference, Dallas, TX, USA, 29–30 March 1989. [Google Scholar]
- Matthes, D. Convergence of ESM sensors and passive covert radar. In Proceedings of the IEEE International Radar Conference, Arlington, TX, USA, 9–12 May 2005. [Google Scholar]
- Rui, L.; Ho, K.C. Elliptic localisation: Performance study and optimum receiver placement. IEEE Trans. Signal Process. 2014, 62, 4673–4688. [Google Scholar] [CrossRef]
- Chalise, B.K.; Zhang, Y.D.; Amin, M.G.; Himed, B. Target localisation in a multi-static passive radar system through convex optimization. Signal Process. 2014, 102, 207–215. [Google Scholar] [CrossRef]
- Zhao, Y.S.; Hu, D.X.; Zhao, Y.J.; Liu, Z.X. Moving target localization in distributed MIMO radar with transmitter and receiver location uncertainties. Chin. J. Aeronaut. 2018, in press. [Google Scholar] [CrossRef]
- Moses, R.; Patterson, R. Self-calibration of sensor networks. In Proceedings of the SPIE—The International Society for Optical Engineering, Orlando, FL, USA, 7 August 2002; Volume 4743, pp. 108–119. [Google Scholar]
- Ash, J.N.; Moses, R.L. On the relative and absolute positioning errors in self-localization systems. IEEE Trans. Signal Process. 2008, 56, 5668–5679. [Google Scholar] [CrossRef]
- Syldatk, M.; Sviestins, E.; Gustafsson, F. Expectation maximization algorithm for calibration of ground sensor networks using a road constrained particle filter. In Proceedings of the 15th International Conference on Information Fusion, Singapore, 9–12 July 2012. [Google Scholar]
- Syldatk, M.; Gustafsson, F. Simultaneous tracking and sparse calibration in ground sensor networks using evidence approximation. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing, Vancouver, BC, Canada, 26–31 May 2013. [Google Scholar]
- Hasan, S.M.; Sahr, J.D.; Hatke, G.F.; Keller, C.M. Passive source localization using an airborne sensor array in the presence of manifold perturbations. IEEE Trans. Signal Process. 2007, 55, 2486–2496. [Google Scholar]
- Ho, K.C.; Yang, L. On the use of a calibration emitter for source localization in the presence of sensor position uncertainty. IEEE Trans. Signal Process. 2008, 56, 5758–5772. [Google Scholar] [CrossRef]
- Yang, L.; Ho, K.C. Alleviating sensor position error in source localization using calibration emitters at inaccurate locations. IEEE Trans. Signal Process. 2009, 58, 67–83. [Google Scholar] [CrossRef]
- Li, J.; Guo, F.; Yang, L.; Jiang, W.; Pang, H. On the use of calibration sensors in source localization using TDOA and FDOA measurements. Digit. Signal Process. 2014, 27, 33–43. [Google Scholar] [CrossRef]
- Strohmeier, M.; Schafer, M.; Lenders, V.; Martinovic, I. Realities and challenges of nextgen air traffic management: The case of ADS-B. IEEE Commun. Mag. 2014, 52, 111–118. [Google Scholar] [CrossRef]
- Petersen, K.B.; Pedersen, M.S. The Matrix Cookbook; Technical University of Denmark: Copenhagen, Denmark, 2012. [Google Scholar]
- Kay, S.M. Fundamentals of Statistical Signal Processing, Estimation Theory; Prentice-Hall: Englewood Cliffs, NJ, USA, 1993. [Google Scholar]
- Bellman, R. Introduction to Matrix Analysis; Mc Graw-Hill: New York, NY, USA, 1960. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| TX | RX | Calibration Targets | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 20,000 | 0 | 100 | 1 | 2000 | 2000 | 0 | 1 | 10,000 | 10,000 | 2500 |
| 2 | 15,000 | 5000 | 1000 | 2 | 2000 | −2000 | 500 | 2 | 15,000 | 30,000 | 3000 |
| 3 | 15,000 | −5000 | 2000 | 3 | 5000 | 5000 | 1000 | 3 | 20,000 | −10,000 | 3500 |
| -- | -- | -- | -- | 4 | 5000 | −5000 | 1500 | -- | -- | -- | -- |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Y.; Hu, D.; Zhao, Y.; Liu, Z.; Zhao, C. Refining Inaccurate Transmitter and Receiver Positions Using Calibration Targets for Target Localization in Multi-Static Passive Radar. Sensors 2019, 19, 3365. https://doi.org/10.3390/s19153365
Zhao Y, Hu D, Zhao Y, Liu Z, Zhao C. Refining Inaccurate Transmitter and Receiver Positions Using Calibration Targets for Target Localization in Multi-Static Passive Radar. Sensors. 2019; 19(15):3365. https://doi.org/10.3390/s19153365
Chicago/Turabian StyleZhao, Yongsheng, Dexiu Hu, Yongjun Zhao, Zhixin Liu, and Chuang Zhao. 2019. "Refining Inaccurate Transmitter and Receiver Positions Using Calibration Targets for Target Localization in Multi-Static Passive Radar" Sensors 19, no. 15: 3365. https://doi.org/10.3390/s19153365