1. Introduction
In recent years, vehicular communication has become a very important subject of study among researchers, due to its potential to increase road-safety and reduce traffic congestion [
1,
2,
3,
4,
5,
6]. There has been a tremendous amount of effort and investment from the government and private organizations to develop a means for highly efficient communication. To support various emerging applications, “cellular-connected vehicles” have been recognized as promising new solutions, by integrating vehicles into the cellular network as the new ground user equipment served by the base stations [
7,
8,
9]. Thanks to the superior performance of the Long Term Evolution and the fifth-generation cellular networks, cellular-connected vehicles are expected to obtain significant performance enhancement in terms of all of throughput, coverage and reliability. In fact, the 3rd Generation Partnership Project (3GPP) standardization body released a dedicated set of criteria for providing V2X applications in future cellular networks in 2016 [
10,
11,
12]. Preliminary field trials have also demonstrated that it is feasible to support the basic communication requirements for V2X with LTE networks [
13,
14,
15,
16,
17].
The key issue with cellular-connected vehicle networks is how to prolong their lifetime. As we all know, the majority of vehicles in V2X networks are sensors that are typically powered by batteries with limited energy, resulting in a constrained network life time [
18,
19,
20,
21]. Meanwhile, the development of battery energy storage technology is unable to keep pace with the significant growth of energy requirements. Though replacement of batteries can extend their lifetime effectively, it will bring higher costs and is sometimes impossible. Traditionally, the energy collecting unit could harvest plentiful renewable energy from natural resources such as the hydro energy, tide and wind, etc. [
22,
23]. However, renewable sources are liable for the limitation caused by an unpredictable climate and change of position. Moreover, it may not be applicable for some application scenarios while harvesting energy from the ambient radio frequency (RF) signals can be controllable. The SWIPT technique exploits different aspects of RF signals, which are signal transmission and power transfer. Therefore, SWIPT technology has attracted great interest from investigators in recent years [
24,
25,
26,
27,
28]. Utilizing this technology, the battery-powered vehicular communication devices can collect energy from the RF radios to prolong their network lifetime. For future vehicles with a mass of on-board sensors, the SWIPT technique is more meaningful for continuable communications of these on-board sensors, whose power can be provided from base stations or other vehicles with excess power or grid-connected roadside electrical units. Particularly, the authors in [
27] designed the optimal beamforming to balance the information and energy transmission. In [
28], the harvested energy and the secrecy channel capacity trade-off problem between the information receiver and energy receivers are considered.
However, all of the above works assume that the perfect knowledge of the receivers’ CSI is available at the base station. In practice, the CSI obtained by the base station may be imperfect. There are many factors resulting in imperfect CSI, such as the quantization error, the delay error and the limited capacity of feedback channel. Moreover, as is known to all, the performance of the approaches with perfect CSI may become poor due to the fact that these methods may be quite sensitive to channel uncertainties. Supposing imperfect CSI at the base station, there are several valuable works on robust beamforming design for multiuser SWIPT systems [
29,
30,
31,
32,
33]. In [
29,
30], the authors proposed a secure beamforming optimization algorithm for SWIPT systems, where cooperation jamming and the external helper is considered. Khandaker et al. in [
31] investigated the chanced constrained beamformer design for a more general SWIPT system in the presence of multiple Eves equipped with multiple antennas. The authors in [
32] considered the resource allocation problem for the secure SWIPT multicasting scenario with channel uncertainties, where a low complexity optimization algorithm was proposed. Moreover, the authors of [
33] also consider the SWIPT multicasting scenario and address the secure beamforming design problem.
From the above discussion, it is worth noting that most of the existing works focused on the beamforming design supporting SWIPT under the linear EH model, where it is assumed that the collected energy power could be linearly increased by growing the input power of the received RF signals. However, the practical power conversion circuits usually perform a nonlinear feature rather than the linear one due to their nonlinear elements such as two-electrode valves or two-electrode valves connected to the transistor. Therefore, the authors of [
34] proposed a nonlinear EH model by fitting over real sampled data based on a logistic function. Then, the resource allocation optimization algorithms for SWIPT and wireless powered communication networks have been attracting increasing interest (see [
35,
36,
37,
38,
39,
40,
41]). In [
35], authors addressed the max-min signal-interference-noise-ratio (SINR) beamforming design optimization problem in a V2X-SWIPT environment with imperfectly estimated channels at the base station, where a practical nonlinear EH model is considered. In [
36,
37], the authors discuss the robust transmit beamformer design, joint user scheduling and power allocation for multiple user SWIPT scenario under nonlinear EH model. In [
38], the authors designed the beamformer for energy efficiency maximization in a secure SWIPT system taking into account the influence of the nonlinear EH circuits. Then, the authors in [
39] investigate the joint optimization of transmit precoding and power splitting ratios in MISO SWIPT multicasting networks with the objective of maximizing the minimum collected energy among all receivers under a generic (including nonlinear) EH model. The multiuser MIMO SWIPT system is also considered in [
40,
41], where the authors study the transmit beamforming design to maximize the harvested power based on perfect CSI under a generic EH model. The results obtained in [
35,
36,
37,
38,
39,
40,
41] demonstrated that a favorable performance gain could be achieved if the beamforming design takes into account the effect of the nonlinear EH circuit instead of a linear EH circuit owing to the mismatch between the linear EH model and the nonlinear EH model. To the best of our knowledge, most of the above works on SWIPT either focus on the optimization of secrecy capacity of information receiver or the transmit power of the base station. It is usually assumed that the CSIs are perfectly available at the base station or the receivers are equipped with one antenna. These motivate us to research uncommonly considered optimization problem of fair power harvesting among all energy vehicular receivers that are equipped with multiple antennas. In addition, the CSIs of base stations to energy vehicular receivers are imperfect.
In this paper, we focus on the optimal secure beamformer design for V2X-SWIPT in a multiple vehicles MISO communication network with multiple multi-antenna energy vehicular receivers, where the nonlinear EH model proposed in [
35] is utilized. The CSIs between the base station and the energy vehicular receivers are supposed to be imperfect. Moreover, the artificial noise-aided signal strategy and the power splitting receivers are taken into account. We aim for the design of a beamforming design algorithm maximizing the minimum harvested energy among multiple multi-antenna energy vehicular receivers for the case when the information vehicular receiver is able to collect energy from radio frequency signals. Our design advocates for the dual use of both energy signal and artificial noise in facilitating efficient wireless energy harvest and providing secure communication. The beamforming design is formulated as a non-convex optimization problem. For obtaining a tractable solution, we reformulated the considered optimization problem by applying a S-procedure and variable substitutions with a tractable solution. The resulting reexpressed non-convex optimization problem can be solved via a semi-definite programming based beamformer design algorithm. Furthermore, the obtained solution is proved to be the optimal solution.
The main contributions of this work are summarized as follows:
Firstly, to explore the network performance, an optimization problem is formulated to maximize the minimum harvested energy power among all the energy vehicular receivers, which is subjected to the required SINR constraints at an information vehicular receiver and energy vehicular receivers, the collected energy power constraints at the information vehicular receiver, and the transmit power constraint at the base station.
Secondly, since the considered problem is non-convex and challenging because there are infinite inequality constraints taking into account the nonlinear EH model and coupling among optimized variables. In order to solve the problem, a beamforming design algorithm is proposed based on the S-procedure and semidefinite relaxation (SDR). Moreover, It is proved that the optimal solution can be guaranteed by applying our approach.
Thirdly, our simulation results demonstrate that the proposed secure beamforming design scheme under the nonlinear EH model with channel uncertainties can provide performance gains compared with that under the linear EH model with channel uncertainties. Moveover, it is shown that a trade-off is found between the SINR of the information vehicular receiver and the energy harvested by energy vehicular receivers.
This rest of this paper is organized as follows. The system model and problem formulation is described in
Section 2.
Section 3 presents a solution for modelling max-min harvested energy power among all the energy vehicular receivers with imperfect CSI and a nonlinear EH model. Simulation results are provided in
Section 4 to verify the effectiveness of the proposed robust secure beamforming design algorithm. Finally, we conclude the paper in
Section 5.
2. System Model and Problem Formulation
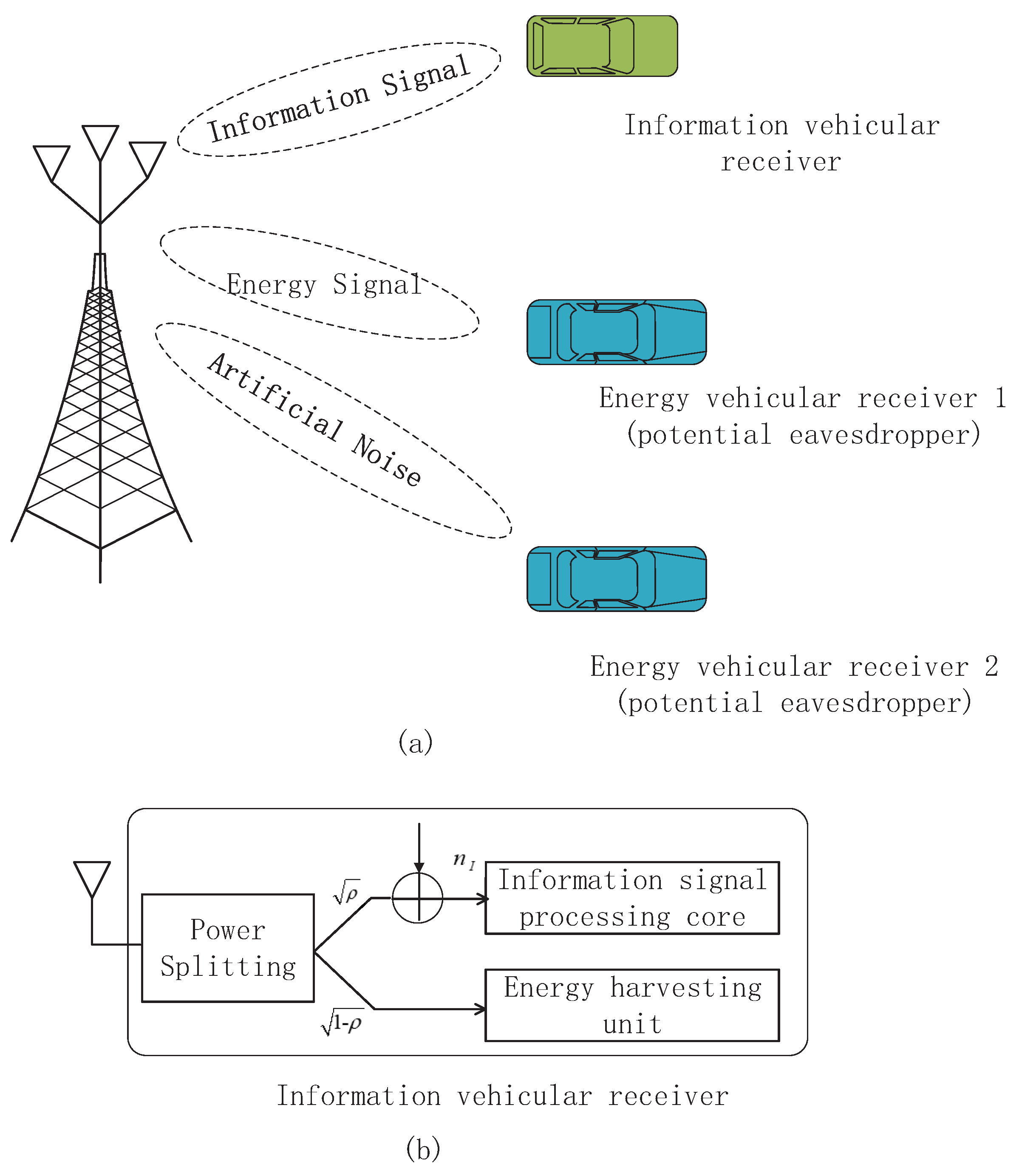
We consider the downlink of a V2X-SWIPT communication system that consists of a base station and two kinds of legitimate vehicular receivers, namely one information vehicular receiver and
idle energy vehicular receivers. The base station is equipped with a
transmit antenna while the information vehicular receiver is a single antenna device and is able to decode information and collect energy from radio signals, cf.
Figure 1. In addition, the
idle energy vehicular receivers equipped with
antennae are supposed to collect energy from the radio frequency as they are inactive. The energy vehicular receivers can work in double functions of EH and information decoding. In this scenario, the idle energy vehicular receivers, which cause no interference to the communication channel, can potentially eavesdrop on the confidential information of the information vehicular receiver by switching its working pattern to information decoding since all the legitimate vehicular receivers are within service coverage. Therefore, the idle energy vehicular receivers are potential eavesdroppers that can take care of supplying physical layer security. The channel vector between the base station and the information vehicular receiver is denoted as
and the channel matrix between the base station and the
k-th energy vehicular receiver is denoted as
,
. In our considered system model, we suppose that the vehicle speed is low. Several simulation and theoretical investigations have shown that V2X communication channels such as
and
can be modelled as Rayleigh channel fading [
42,
43,
44,
45]. It is assumed that our considered system works in a Time Division Duplex (TDD) mode with slowly time-varying communication channels. Hence, the base-station-to-legitimate-vehicular-receiver fading gains,
and
, could be reliably estimated at the base station at the start of each scheduling slot with negligible channel estimation errors. During the data transmission, the information vehicular receiver sends acknowledgement packets to tell the base station of successful reception of data packets. Hence, in this paper, the channel uncertainties for the base-station-to-energy-vehicular-receiver are considered while the CSI of the base-station-to-information-vehicular-receiver is perfectly known at the base station. We model the CSI of the link between the base station and the
k-th energy vehicular receiver as:
where
is the channel estimate of the
k-th energy vehicular receiver available at the base station while
denotes the unknown channel uncertainty of the energy vehicular receiver
k. For notational simplicity, a set
in Label (
2), which includes all possible CSI uncertainties of energy vehicular receiver
k. Moreover, the radius
denotes the size of the uncertainty region of the estimated CSI of the energy vehicular receiver
k.
To provide vehicular secure communication and to facilitate EH at the desired information vehicular receiver, artificial noise signals and energy signals are generated at the base station. In particular, both signals could degrade the channels between the base station and the energy vehicular receivers and perform as an energy source for EH. As a result, we express the transmit signal vector
as
where
and
are the information-bearing signal and the corresponding beamforming vector for the information vehicular receiver, respectively. Without loss of generality, we suppose that
.
and
are the energy beamforming vector and the energy-bearing signal with
, respectively.
represents the artificial noise vector generated by the base station to combat both passive and potential eavesdroppers, and we model it as
. With the transmit signal
, the received signal at information vehicular receiver and
k-th energy vehicular receiver can be expressed as
respectively, where
and
represent the complex Gaussian noise at the information vehicular receiver and the
k-th passive eavesdropper, respectively.
and
is the noise power of each other. In the considered networks, we exploit the energy and artificial noise signals transmitted by the base station to facilitate secure information transfer and charge both information vehicular receiver and energy vehicular receivers, respectively. In this paper, we adopt a practical nonlinear model. According to [
35,
36], the harvested energy at the
k-th energy vehicular receiver can be modeled as:
with
where
,
,
and
.
denote the received RF power at the
k-th energy vehicular receiver. Three parameters, namely,
,
and
in (
6) are introduced to capture the joint effects of various nonlinear phenomena caused by hardware limitations in practical EH circuits. Furthermore,
denotes the maximum power that can be collected by the EH circuit while
and
rely on serval hardware phenomena, such as the capacitance and diode turn-on voltage and the resistance.
As depicted in
Figure 1, we adopt the power splitting architecture at the information vehicular receiver, the RF signals are divided into two streams by a power splitter in
, i.e., the
part of the received signals is input into the EH receiver and the remaining
part is sent to the information receiver. Therefore, the received SINR can be expressed as
The input power at the information vehicular receiver can be written as
Here, we also adopt the nonlinear EH model, and then the harvested energy at the information vehicular receiver is given by
with
where
and
.
is a constant representing the maximum harvested power at the information vehicular receiver when the EH circuit is saturated.
and
are also constants associated with the detailed circuit specifications.
Without loss of generality, the energy vehicular receivers can also perform as eavesdroppers to decode the confidential information for the information vehicular receiver. Due to the fact that the energy signal
is the only Gaussian pseudo-random sequence that is known at legitimate receivers (including both information vehicular receiver and energy vehicular receivers), we can thus perform interference cancellation at each energy vehicular receiver. As a result, the SINR of the
k-th energy vehicular receiver is given by
The optimal beamforming design policy,
, for maximizing the minimum harvest energy among all the
energy vehicular receivers, can be obtained by solving
The cost function in (
13) takes into account the CSI uncertainty set
to provide robustness against CSI imperfection. In C1:
r represents the minimum SINR of the information vehicular receiver for information decoding. Constraint C2 is imposed such that for a given CSI uncertainty set
, the maximum received SINR at the passive eavesdropper
k is not larger than the maximum tolerable received SINR
. In practice,
,
, to guarantee vehicular secure communication. Constraint C4 set the minimum required power transfer for the information vehicular receiver. Constraint C4 restricts the transmit power at the base station to account for the maximum power.
Remark 1. In our considered V2X-SWIPT network, the information vehicular receiver is assumed to have limited signal decoding capability and hardware complexity compared to the energy vehicular receivers. In order to ensure communication security, we adopt the worse-case assumption that the information vehicular receiver is equipped with a single antenna while all energy vehicular receivers is equipped with multiple antennas.
4. Simulation Results
In this section, we provide simulation results to validate the performance of our proposed robust beamforming design algorithm. The considered vehicular secure downlink channel in
Section 2 for Rayleigh flat-fading environments with zero-mean and unit variance is considered. Unless specified otherwise, it is assumed that there are
energy vehicular receivers. Indeed, we have some other configurations that can be employed with a different number of energy vehicular receivers, transmit antennas and receiver antennas; however, the simulation results will be similar, the only difference is the computation complexity. In our simulations, we set
,
,
r = 10 dB,
= 0 dB,
25 dBm,
mW,
dBm. For the nonlinear EH model, we set:
mW,
,
. To the imperfect CSI between the base station and energy vehicular receivers,
is defined as the channel uncertainty ratio to demonstrate the
kth energy vehicular receiver’s channel estimate error. Without loss of generality, it is assumed that
. We solve the optimization problem (
21) and compute the average minimum harvested energy power per energy vehicular receiver by averaging over 1000 channel realizations.
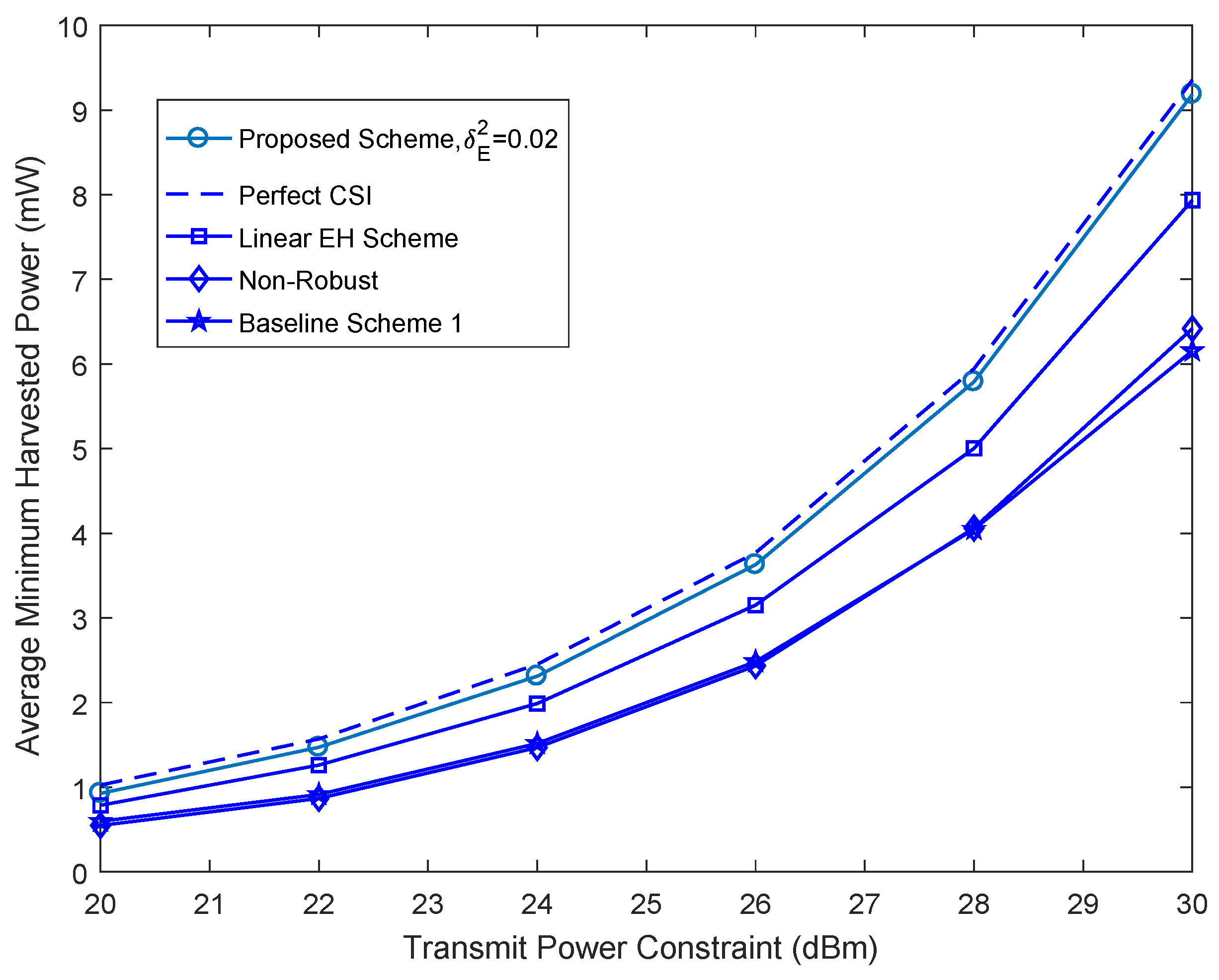
Figure 2 depicts the average minimum harvested energy power per energy vehicular receiver versus the maximum power of the base station,
P, for
energy vehicular receivers,
, and different beamforming design schemes. We learn that the average minimum harvested energy power per energy vehicular receiver of the proposed beamforming design scheme is a monotonically increasing function of
P. This is attributed to the fact that a higher harvested energy power is necessary for satisfying constraint C4 when the maximum transmit power requirement of
P becomes more stringent. For a comprehensive comparison,
Figure 2 also contains the average minimum harvested energy power per energy vehicular receiver of the proposed algorithm that the base station has perfect CSI, the non-robust scheme, the linear EH scheme and two baseline beamforming design schemes. For the non-robust scheme, we treat the estimated channel
,
as true CSI, and then optimize
jointly in (
21) according to
,
. For the linear EH scheme, we adopt the existing linear EH model for the beamforming design algorithm. In particular,
optimizes to the maximum the minimum harvested energy power per energy vehicular receiver subject to the constraints in (
13). For the baseline scheme 1, we adopt the zero-forcing approach to null out the undesired interference to the information vehicular receiver. In particular, we choose
and
lying in the null space of the channel
. Furthermore, we employ the maximum ratio transmission for transmitting information to the information vehicular receiver. It can be observed that the proposed scheme closely approaches the performance of the perfect CSI scheme. On the other hand, it can be seen that the low computational complexity of the baseline scheme 1 comes at the expense of a significantly lower harvested energy power compared to the proposed scheme and the linear EH scheme. Indeed, the proposed scheme and the linear EH scheme fully use the CSI of all vehicular communication links and optimize the space spanned by the artificial noise and the energy signal for performing beamforming design. On the contrary, for the baseline scheme 1, the base station is unable to fully utilize the available degrees of freedom in beamforming design because the both the energy beam
and artificial noise
are fixed. Finally, with the increase of
P, the proposed scheme achieves higher harvested energy power than other schemes for every channel realization. The reason for this is that the proposed scheme takes into account the nonlinearity of practical EH circuits leading to mismatches in beamforming design.
In
Figure 3, we study the average minimum harvested energy power per energy vehicular receiver versus the maximum power of the base station,
P, for
energy vehicular receivers, and different than the maximum channel estimation errors,
. As can be seen, with the increase of
P, the average minimum harvested energy power per energy vehicular receiver increases for increasing maximum channel estimation error,
. Indeed, with increasing the imperfectness of channel estimation, the base station has to allocate less power to the artificial noise and energy signals to ensure vehicular secure communication.
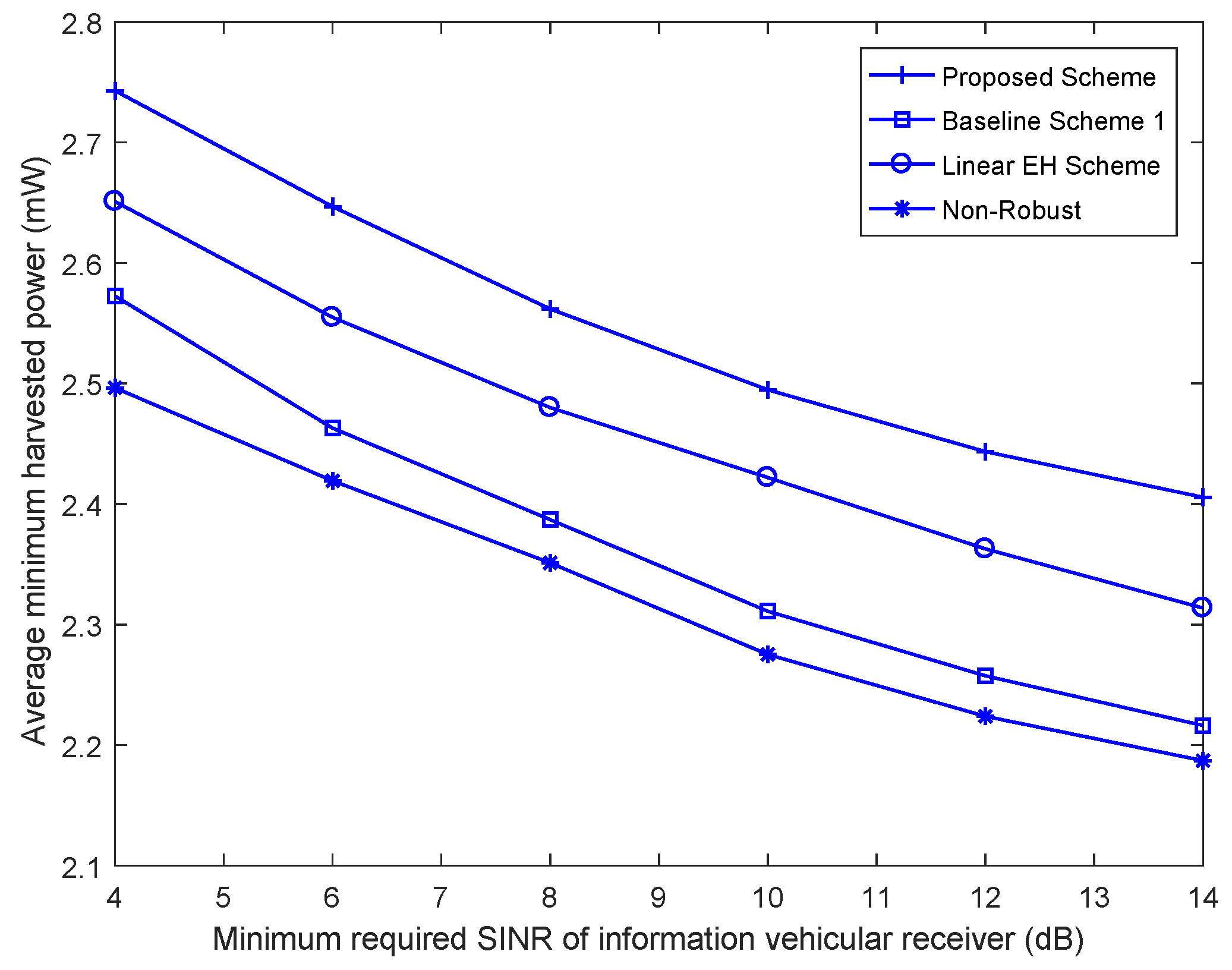
In
Figure 4, we move on to investigating how the average harvested energy power per energy vehicular scales with the minimum required SINR of the information vehicular receiver,
r, for
energy vehicular receivers,
, and different beamforming design schemes. It can seen that the average minimum harvested energy power per energy vehicular receiver of the proposed scheme is a monotonically increasing function of
r. This is owing to the fact that there is a trade-off of the proposed beamforming design scheme between power collecting of the energy vehicular receivers and the guarantee of physical layer secure of information vehicular receiver. In particular, the achieved SINR of the information vehicular receiver and the minimum harvested energy power per energy vehicular receiver can not be maximized simultaneously with fixed
and vice versa. Among all the considered beamforming design schemes, the proposed nonlinear EH scheme still achieves a better performance than the other beamforming design schemes.
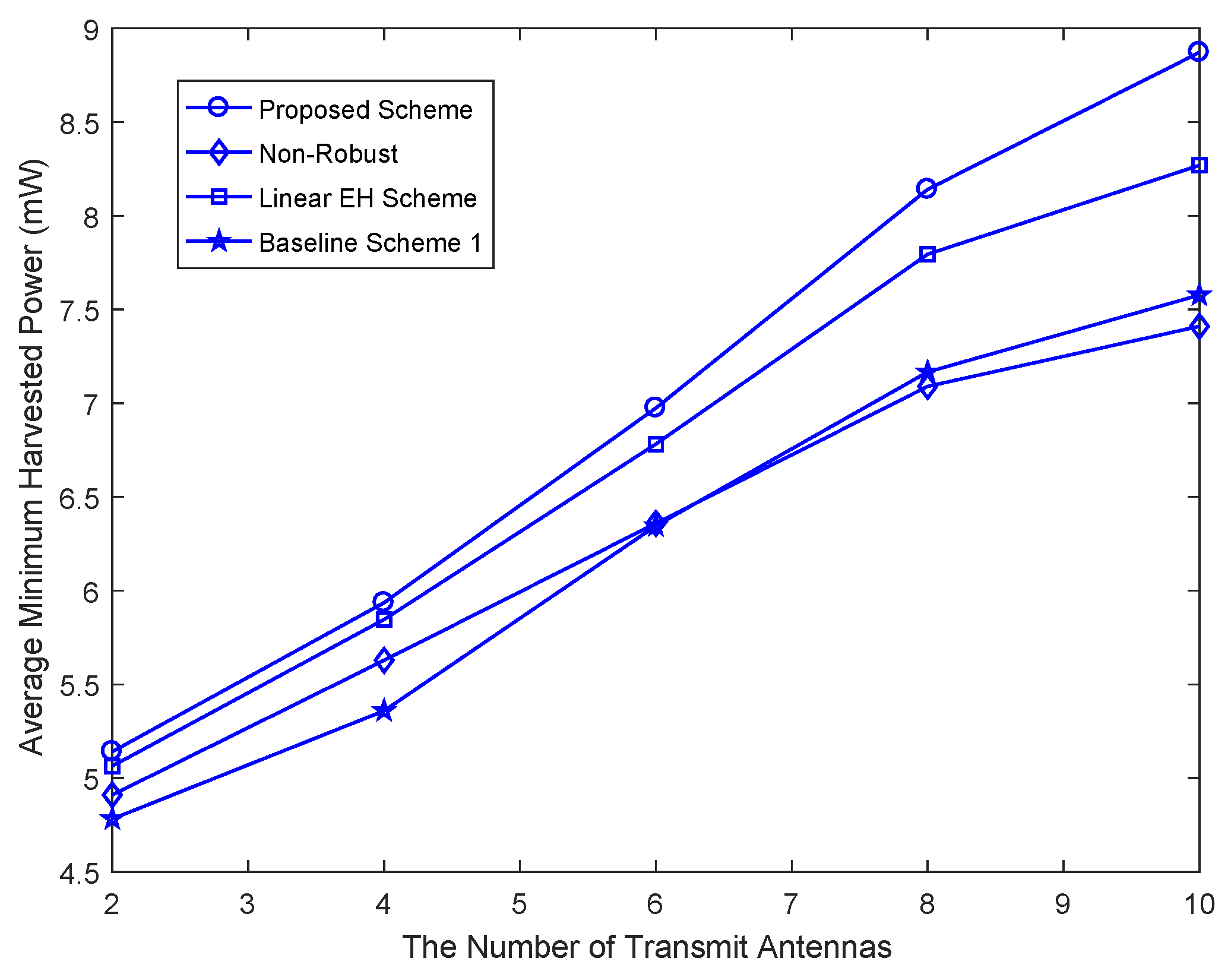
Figure 5 shows the average minimum harvested energy power per energy vehicular receiver versus the number of the transmit antenna,
, for
energy vehicular receivers,
, and different beamforming design schemes. It can observed that the average minimum harvested energy power per energy vehicular receiver in the considered system increases with the increasing number of antennae. These results advise that a higher amount of energy is available in the RF for energy collecting when the number of the transmit antennae increases. This is owing to the fact that with more transmit antennae the direction of energy beamforming matrix
can be more accurately steered towards the energy vehicular receivers, which further increase the amount of energy available in the RF for energy collecting. Among all the considered beamforming design schemes, the proposed beamforming design scheme also achieves a better performance than the other beamforming design schemes.
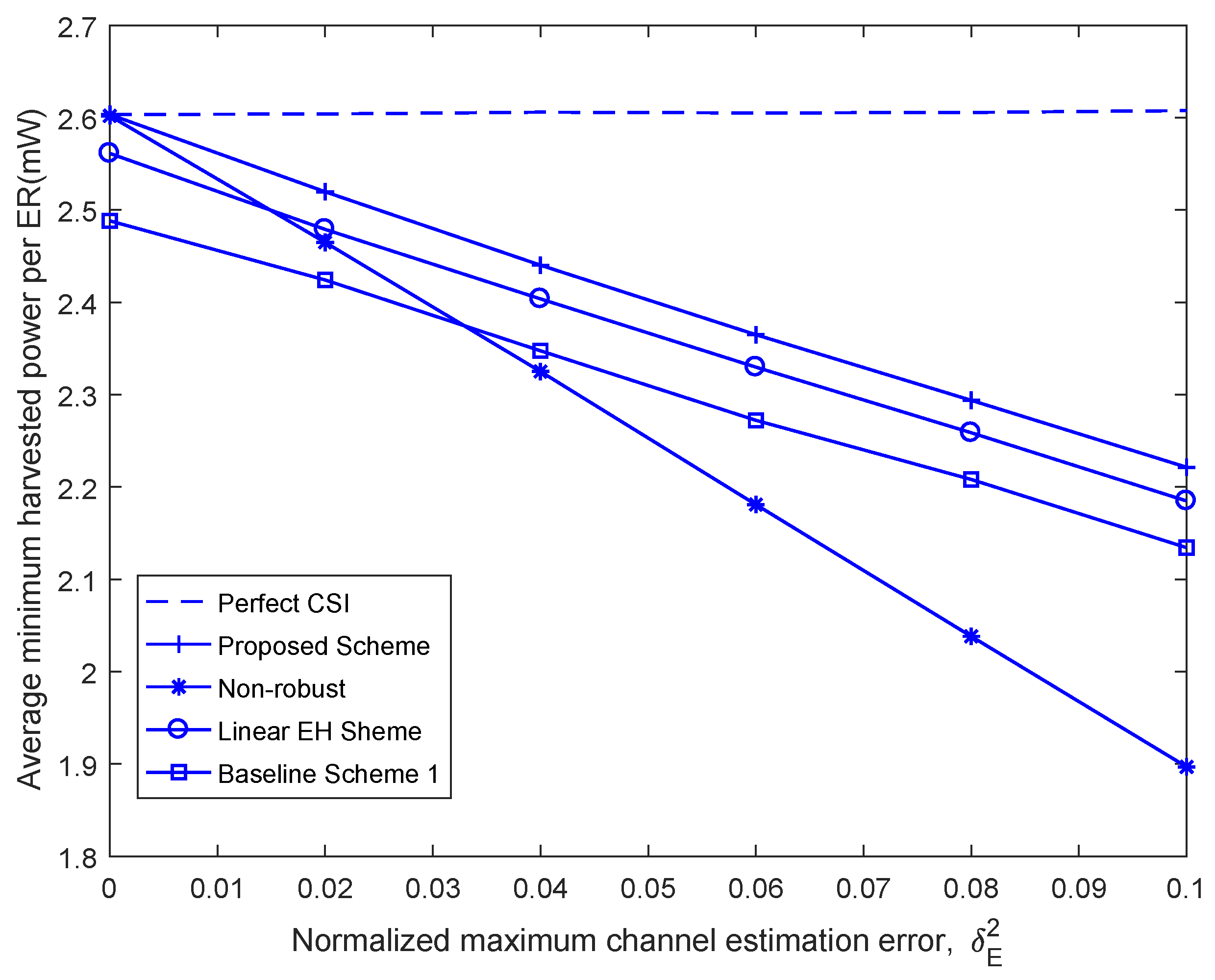
Figure 6 illustrates the average minimum harvested energy power per energy vehicular receiver versus the maximum channel estimation error, i.e.,
, for different beamforming design schemes. As seen in
Figure 6, it can be seen that the minimum harvested energy per energy vehicular receiver of the proposed robust beamforming design scheme decreases with the increase of the estimated channel error,
, which confirms the motivation of the worse case robust optimization. Moreover, we learn intuitively that the proposed nonlinear EH beamforming design scheme performs considerably better than other beamforming design schemes but worse than the perfect case.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





