
A Readout IC Using Two-Step Fastest Signal Identification for Compact Data Acquisition of PET Systems

Abstract
:1. Introduction
2. Overall Architecture
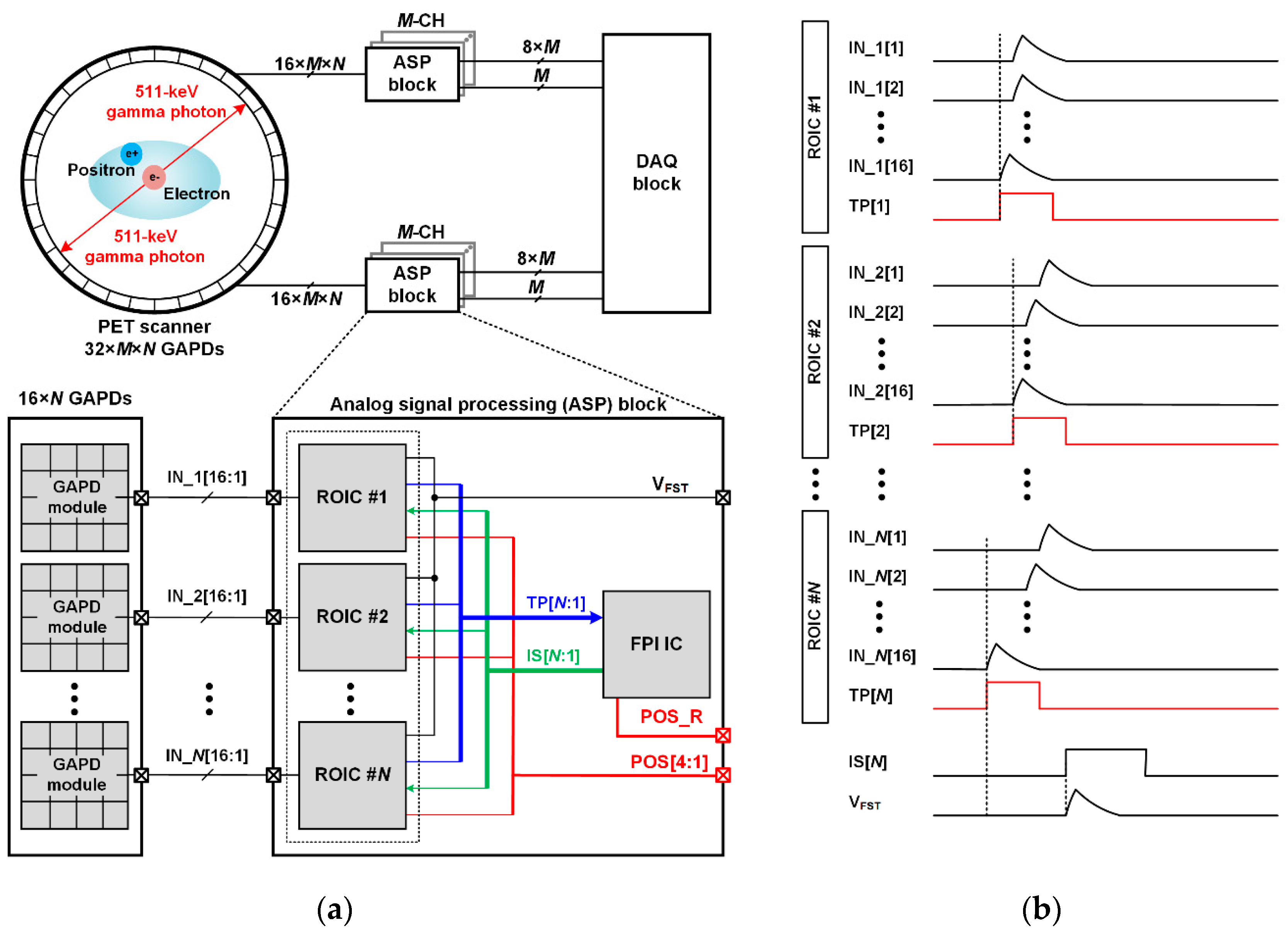
2.1. Architecture of a PET System Based on the Proposed ROIC
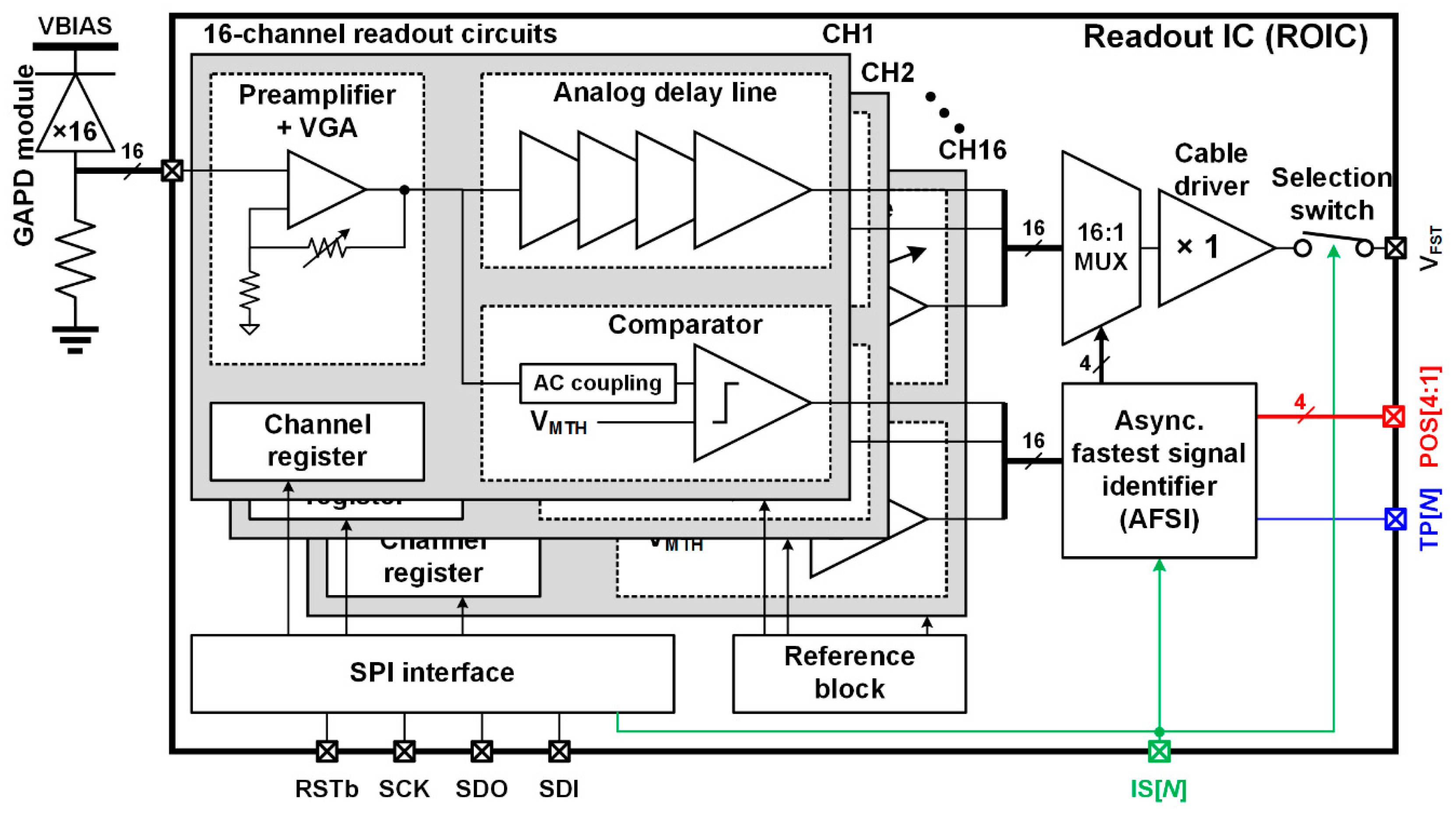
2.2. Architecture of the Proposed ROIC
3. Circuit Implementation of the Proposed ROIC
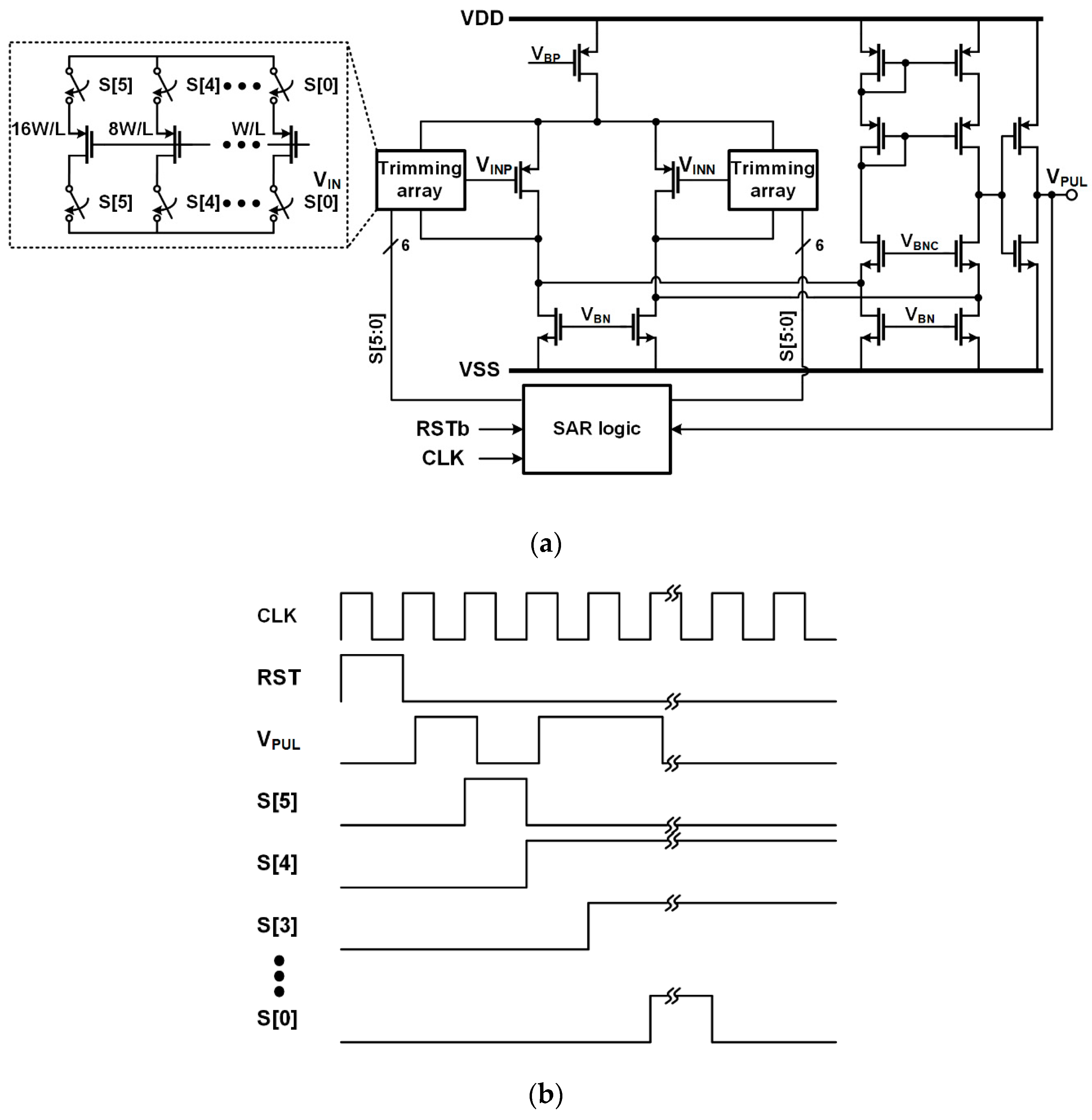
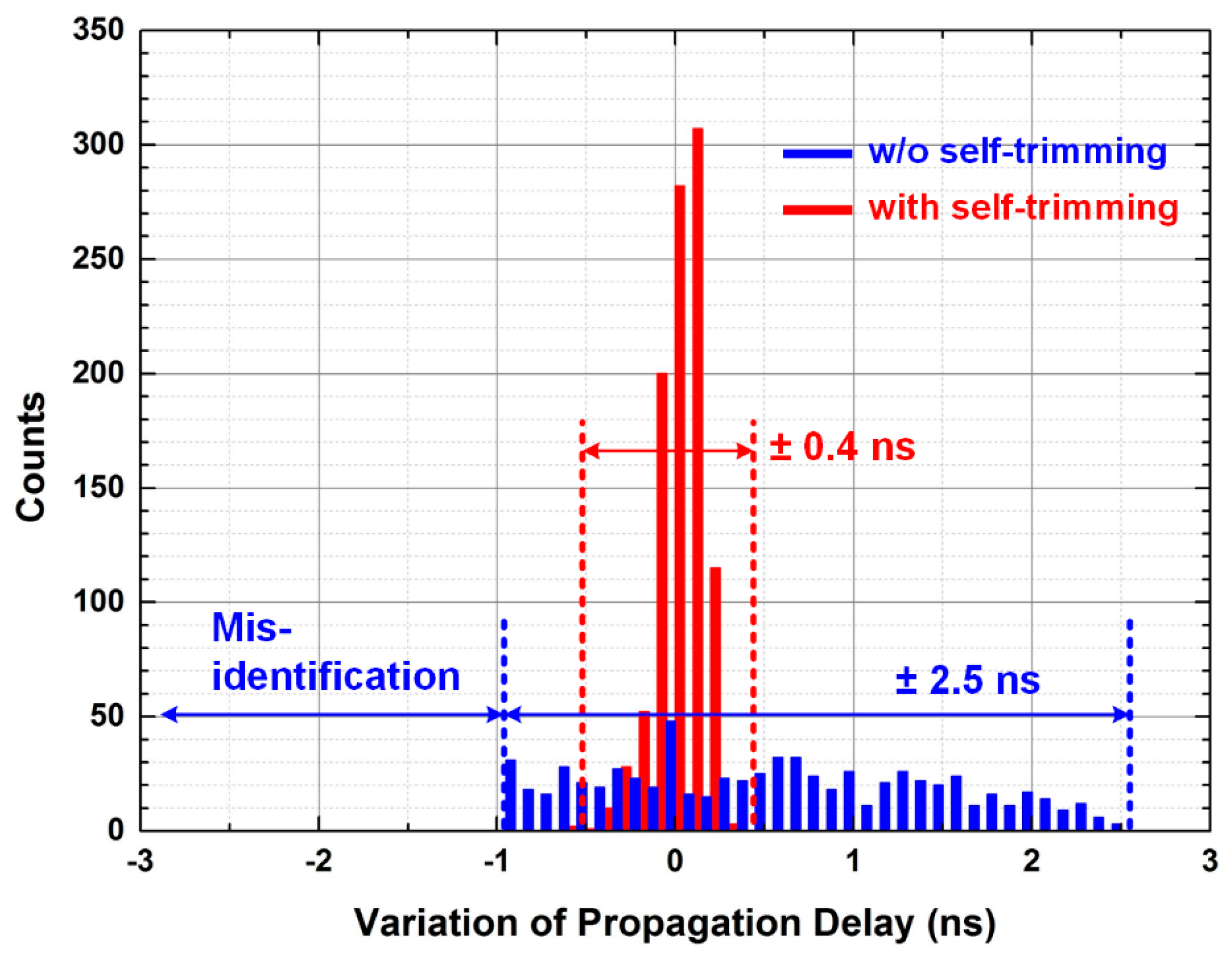
3.1. Self-Trimmed Comparator
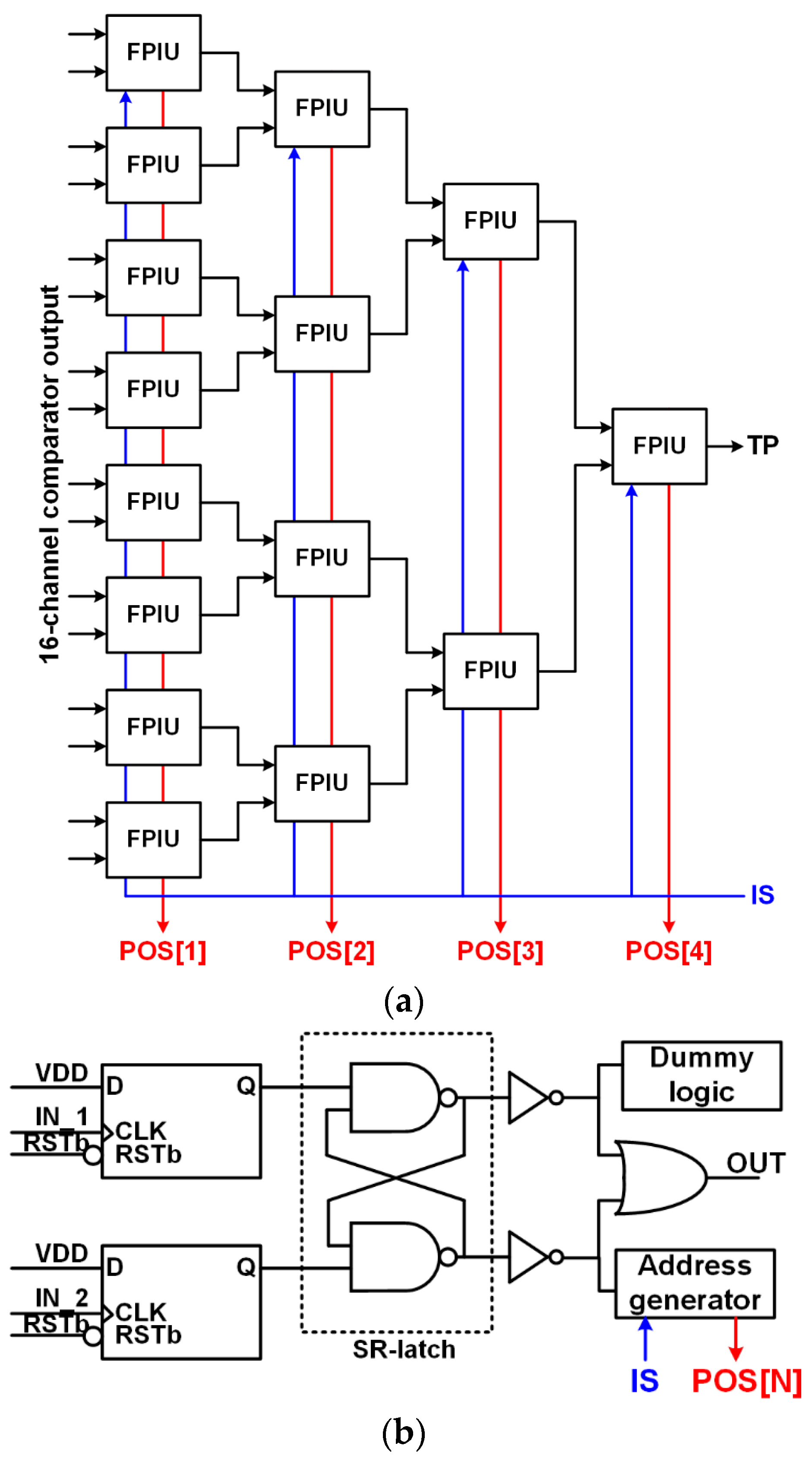
3.2. Asynchronous Fastest Signal Identifier
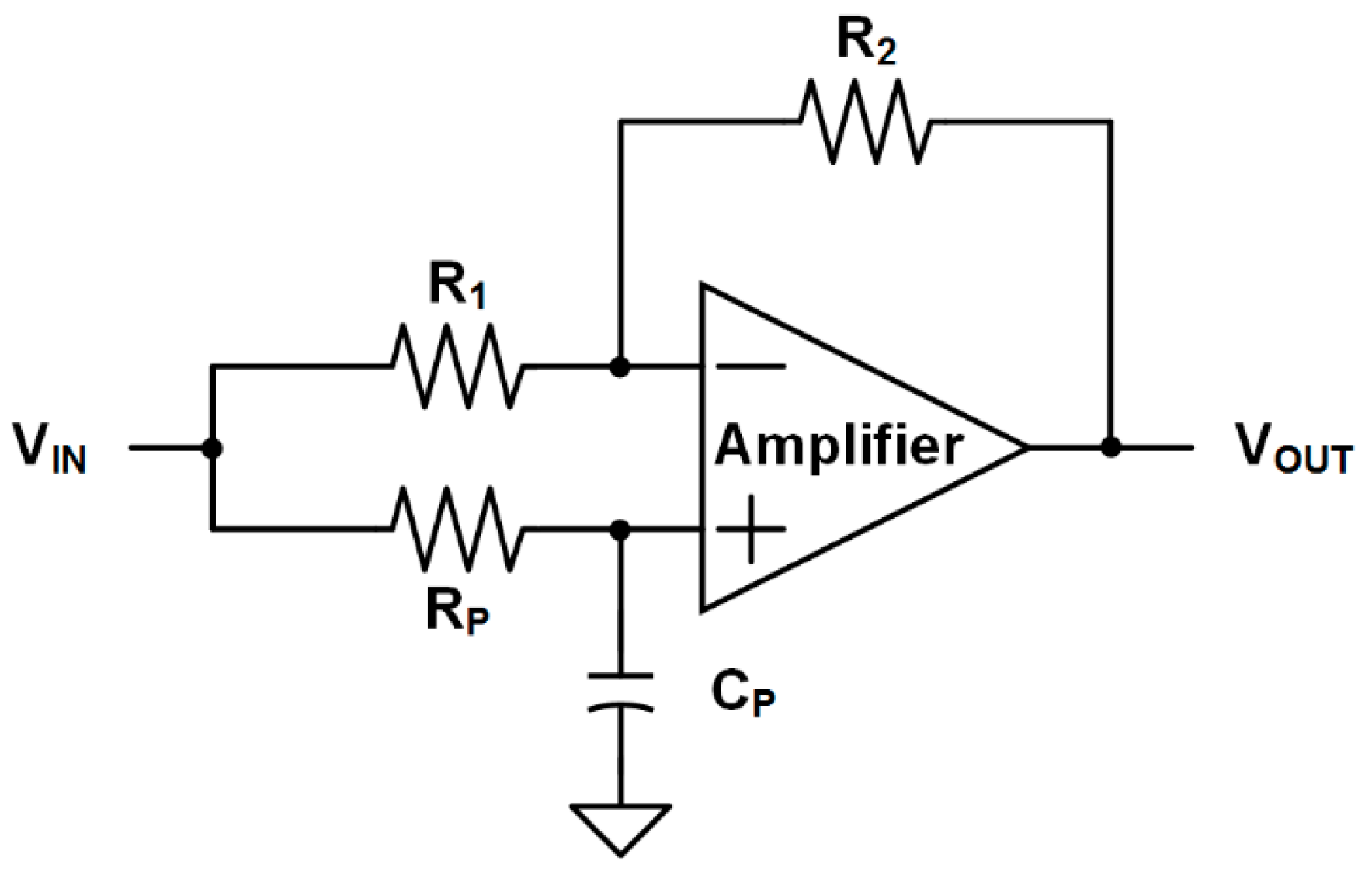
3.3. Analog Delay Line
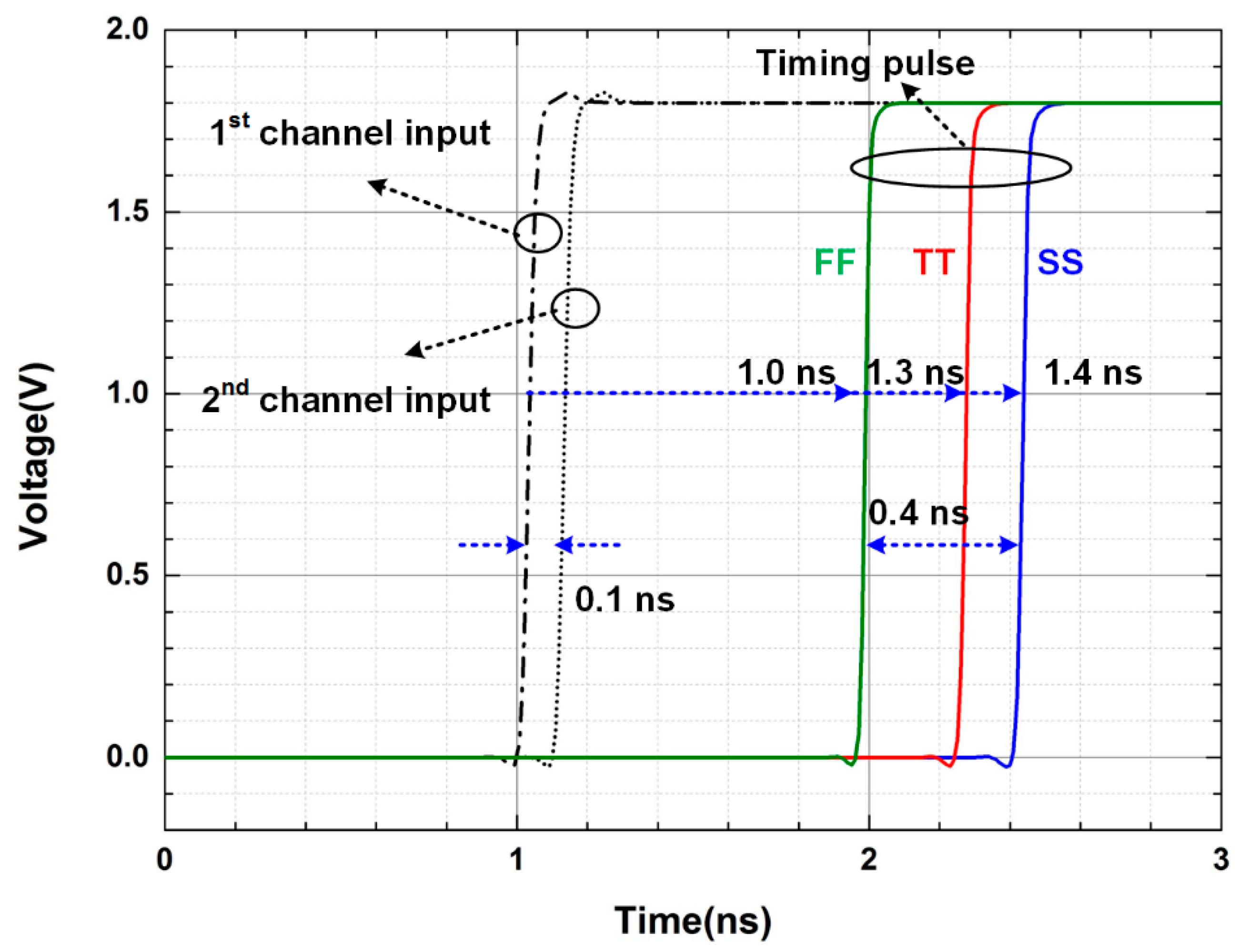
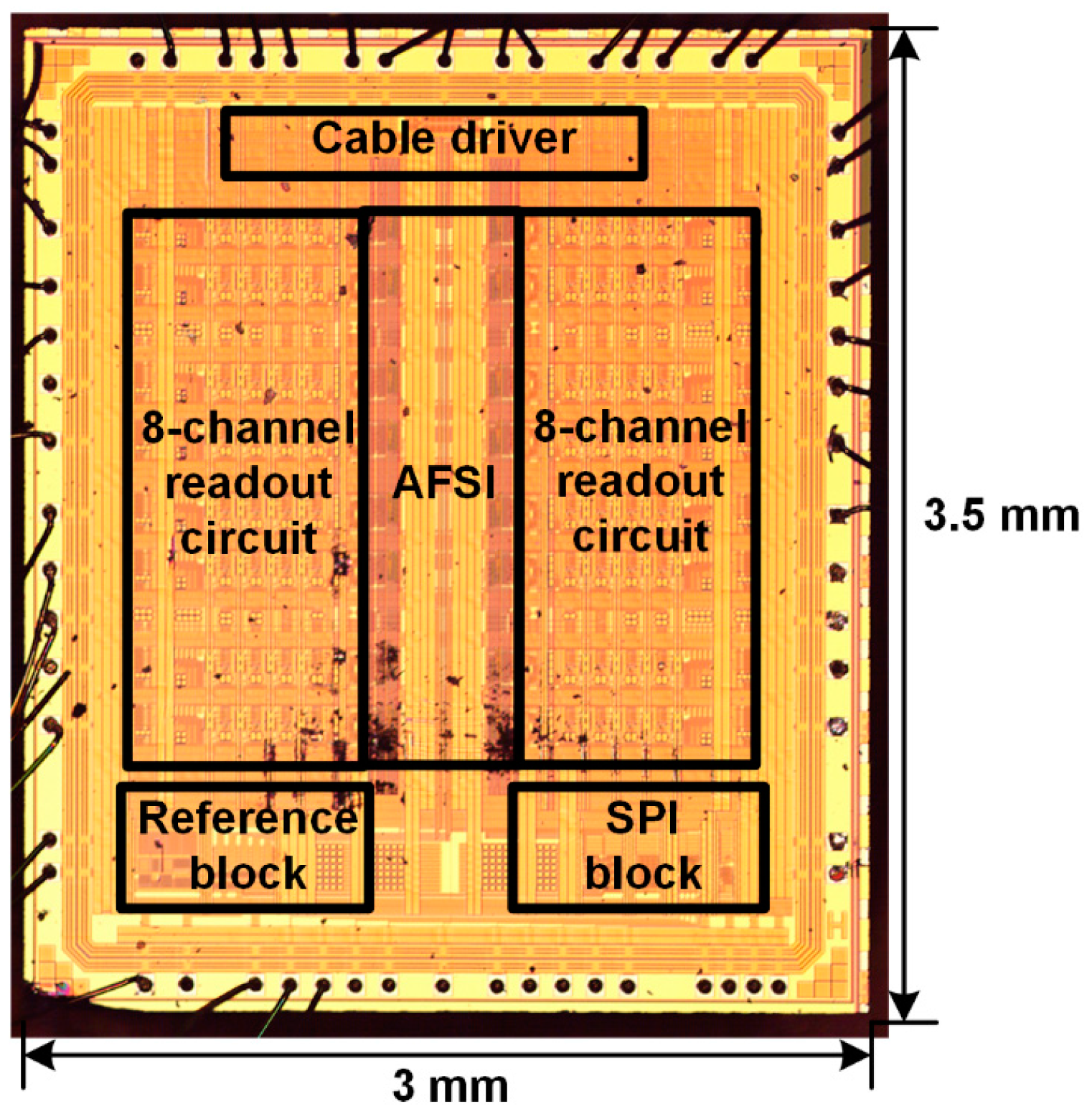
4. Experimental Results
5. Conclusions
Author Contributions
Conflicts of Interest
References
- Zhao, J.; Hu, X.; Zou, J.; Hu, X. Geometric Parameters Estimation and Calibration in Cone-Beam Micro-CT. Sensors 2015, 15, 22811–22825. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Peterson, B.S.; Dong, Z. A Support-Based Reconstruction for SENSE MRI. Sensors 2013, 13, 4029–4040. [Google Scholar] [CrossRef] [PubMed]
- Jo, Y.R.; Hong, S.K.; Kwon, O.K. CMOS Flat-Panel X-ray Detector with Dual-Gain Active Pixel Sensors and Column-Parallel Readout Circuits. IEEE Trans. Nucl. Sci. 2014, 61, 2380–2389. [Google Scholar] [CrossRef]
- Jung, S.J.; Song, J.K.; Kwon, O.K. Three-side buttable integrated ultrasound chip with a 16 × 16 reconfigurable transceiver and capacitive micromachined ultrasonic transducer array for 3-D ultrasound imaging systems. IEEE Trans. Electron Devices 2013, 60, 3562–3569. [Google Scholar] [CrossRef]
- Thompson, C.J.; Goertzen, A.L.; Thiessen, J.D.; Bishop, D.; Stortz, G.; Kozlowski, P.; Retière, F.; Zhang, X.; Sossi, V. Development of a PET Scanner for Simultaneously Imaging Small Animals with MRI and PET. Sensors 2014, 14, 14654–14671. [Google Scholar] [CrossRef] [PubMed]
- Jung, J.H.; Choi, Y.; Hong, K.J.; Hu, W.; Kang, J.H.; Min, B.J.; Shin, S.H.; Lim, H.K.; Huh, Y.S.; Kim, E.J. Development of a Position Decoder Circuit for PET Consisting of GAPD Arrays. Nucl. Instrum. Methods Phys. Res. A 2010, 621, 310–315. [Google Scholar] [CrossRef]
- Jung, J.H.; Choi, Y.; Jung, J.W.; Kim, S.S. Development of a high-density position decoder circuit for GAPD-based PET with a large number of readout channels. Nucl. Instrum. Methods Phys. Res. A 2014, 741, 117–123. [Google Scholar] [CrossRef]
- Enz, C.C.; Temes, G.C. Circuit techniques for reducing the effects of Op-Amp imperfections: Autozeroing, correlated double sampling, and chopper stabilization. Proc. IEEE 1996, 84, 1584–1614. [Google Scholar] [CrossRef]
- Miyahara, M.; Asada, Y.; Paik, D.; Matsuzawa, A. A low-noise self-calibrating dynamic comparator for high-speed ADCs. In Proceedings of the 2008 IEEE Asian Solid-State Circuits Conference, Fukuoka, Japan, 3–5 November 2008; pp. 269–272.
- Bolatkale, M.; Pertijs, M.A.P.; Kindt, W.J.; Huijsing, J.H.; Makinwa, K.A.A. A Single-Temperature Trimming Technique for MOS-Input Operational Amplifiers Achieving 0.33 V/C Offset Drift. IEEE J. Solid State Circuit 2011, 46, 2099–2107. [Google Scholar] [CrossRef]
- Yu, Z.; Pertijis, M.A.P.; Meijer, G.C.M. Ultrasound beamformer using pipeline operated S/H delay stages and charge mode summation. Electron. Lett. 2011, 47, 1011–1012. [Google Scholar] [CrossRef]
- Gurun, G.; Zahorian, J.S.; Sisman, A.; Karaman, M.; Hasler, P.E.; Degertekin, F.L. An analog integrated circuit beamformer for highfrequency medical ultrasound imaging. IEEE Trans. Biomed. Circuits Syst. 2012, 6, 454–467. [Google Scholar] [CrossRef] [PubMed]
- Um, J.Y.; Kim, Y.J.; Cho, S.E.; Chae, M.K.; Kim, B.; Sim, J.Y.; Park, H.J. A single-chip 32-channel analog beamformer with 4-ns delay resolution and 768-ns maximum delay range for ultrasound medical imaging with a linear array transducer. IEEE Trans. Biomed. Circuits Syst. 2012, 9, 138–151. [Google Scholar] [CrossRef] [PubMed]
- Talman, J.R.; Garverick, S.L.; Lockwood, G.R. Integrated circuit for high-frequency ultrasound annular array. In Proceedings of the 2003 IEEE Custom Integrated Circuits Conference, San Jose, CA, USA, 21–24 September 2003; pp. 477–480.
- Tai, Y.C.; Chatziioannou, A.; Siegel, S.; Young, J.; Newport, D.; Goble, R.N.; Nutt, R.E.; Cherry, S.R. Performance evaluation of the micro PET P4: A PET system dedicated to animal imaging. Phys. Med. Biol. 2001, 46, 1845–1862. [Google Scholar] [CrossRef] [PubMed]
- Humm, J.L.; Rosenfeld, A.; Guerra, A.D. From PET detectors to PET scanners. Eur. J. Nucl. Med. Mol. Imaging 2003, 30, 1574–1597. [Google Scholar] [CrossRef] [PubMed]
- Oo, K.T.Z.; Mandelli, E.; Moses, W.W. A High-Speed Low-Noise 16-Channel CSA with Automatic Leakage Compensation in 0.35-μm CMOS Process for APD-Based PET Detectors. IEEE Trans. Nucl. Sci. 2007, 54, 444–453. [Google Scholar] [CrossRef]
- Ollivier-Henry, N.; Gao, W.; Fang, X.; Mbow, N.A.; Brasse, D.; Humbert, B.; Hu-Guo, C.; Colledani, C.; Hu, Y. Design and Characteristics of a Multichannel Front-End ASIC Using Current-Mode CSA for Small-Animal PET Imaging. IEEE Trans. Biomed. Circuits Syst. 2011, 5, 90–99. [Google Scholar] [CrossRef] [PubMed]
- Gao, W.; Liu, H.; Gan, B.; Wei, T.; Gao, D.; Hu, Y. Design of a Multichannel Low-Noise Front-End Readout ASIC Dedicated to CZT Detectors for PET Imaging. IEEE Trans. Nucl. Sci. 2014, 61, 2532–2539. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | This Work | [17] | [18] | [19] |
|---|---|---|---|---|
| Process | 0.18-μm CMOS | 0.35-μm CMOS | 0.35-μm CMOS | 0.35-μm CMOS |
| Supply voltage | 1.8 V | 3.3 V | 3.3 V | 3.3 V |
| Detector module | LYSO/GAPD | LSO/APD | LYSO/MCP-PMT | CZT |
| Signal reduction | Two-step FSI | N/A | N/A | N/A |
| Channel reduction ratio | 64:1 (16 × N:1) * | N/A | N/A | N/A |
| Min. detectable time difference | 1 ns | N/A | N/A | N/A |
| No. of channels | 16 | 16 | 10 | 8 |
| Power consumption | 4 mW/channel | 10 mW/channel | 15 mW/channel | 3 mW/channel |
| Chip area | 3 × 3.5 mm2 | 2.5 × 1.7 mm2 | 2.8 × 2.18 mm2 | 2.28 × 2.28 mm2 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jung, S.-J.; Hong, S.-K.; Kwon, O.-K. A Readout IC Using Two-Step Fastest Signal Identification for Compact Data Acquisition of PET Systems. Sensors 2016, 16, 1748. https://doi.org/10.3390/s16101748
Jung S-J, Hong S-K, Kwon O-K. A Readout IC Using Two-Step Fastest Signal Identification for Compact Data Acquisition of PET Systems. Sensors. 2016; 16(10):1748. https://doi.org/10.3390/s16101748
Chicago/Turabian StyleJung, Sung-Jin, Seong-Kwan Hong, and Oh-Kyong Kwon. 2016. "A Readout IC Using Two-Step Fastest Signal Identification for Compact Data Acquisition of PET Systems" Sensors 16, no. 10: 1748. https://doi.org/10.3390/s16101748