Landsat Analysis Ready Data for Global Land Cover and Land Cover Change Mapping

 , and
, and
Abstract
:
1. Introduction
2. The GLAD ARD Methodology
2.1. Landsat Image Processing
2.1.1. Image Selection
2.1.2. Conversion to Radiometric Quantity
2.1.3. Observation Quality Assessment
2.1.4. Reflectance Normalization
(1) Normalization target
(2) Pseudo-Invariant Objects
(3) Model Parametrization
(4) Model Application
2.2. Temporal Integration and Tiling
3. GLAD ARD Structure
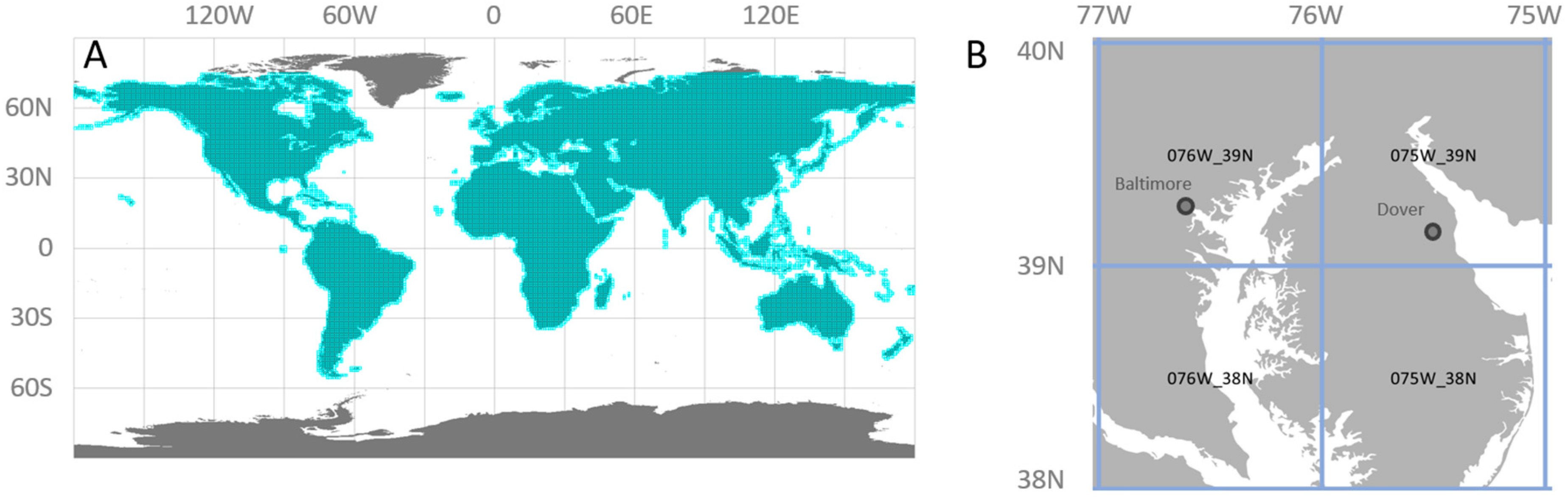
3.1. Global Tile System
3.2. 16-Day Composite Data
4. Multi-Temporal Metrics
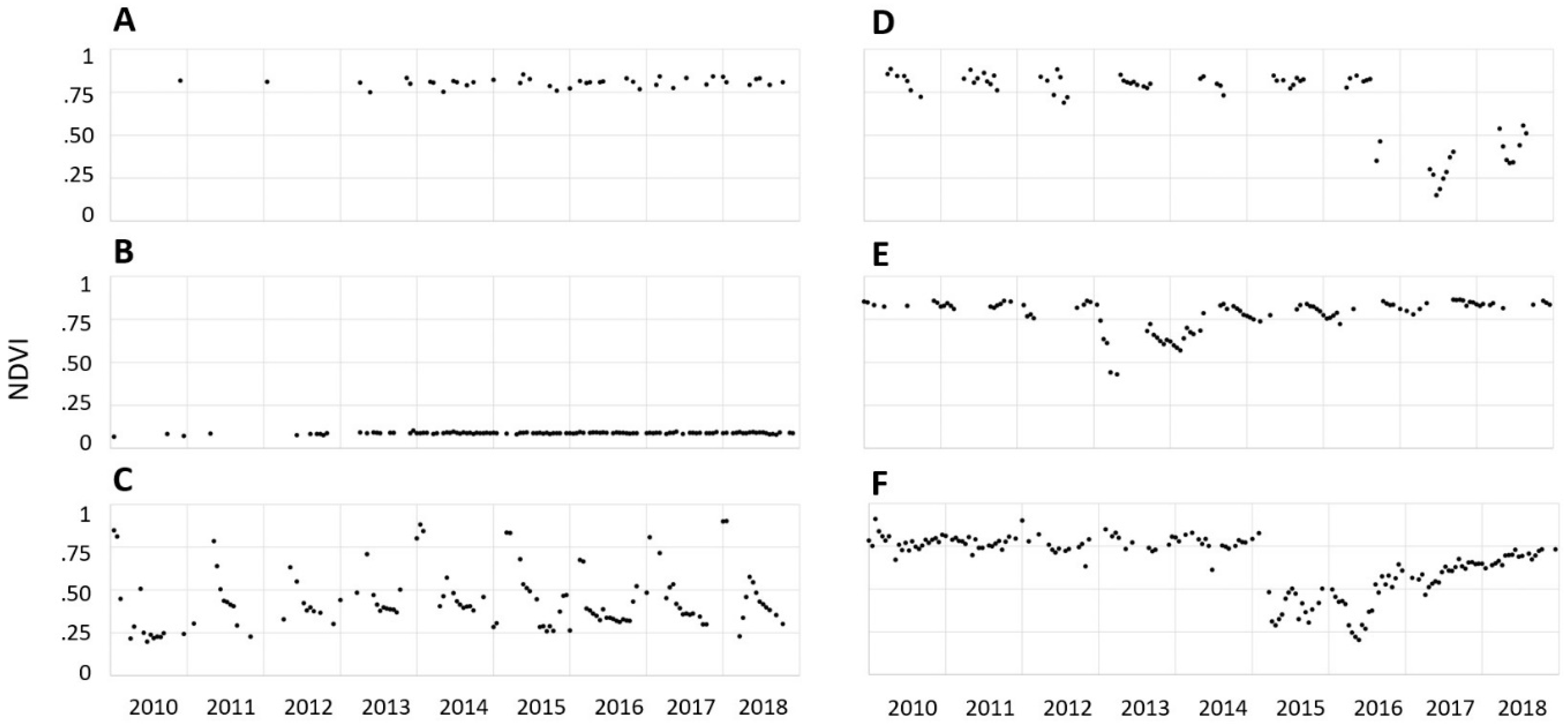
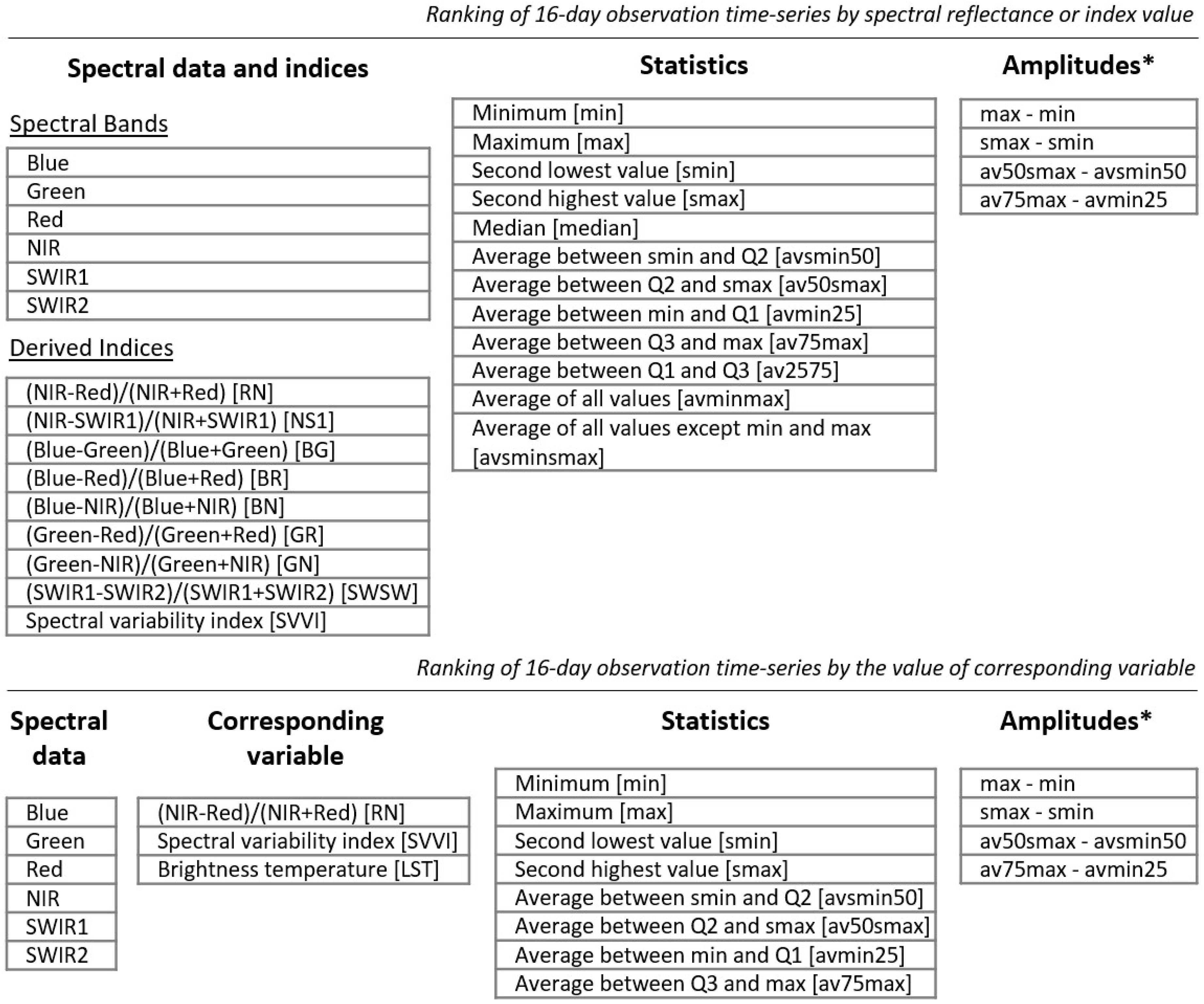
4.1. Annual Phenological Metrics
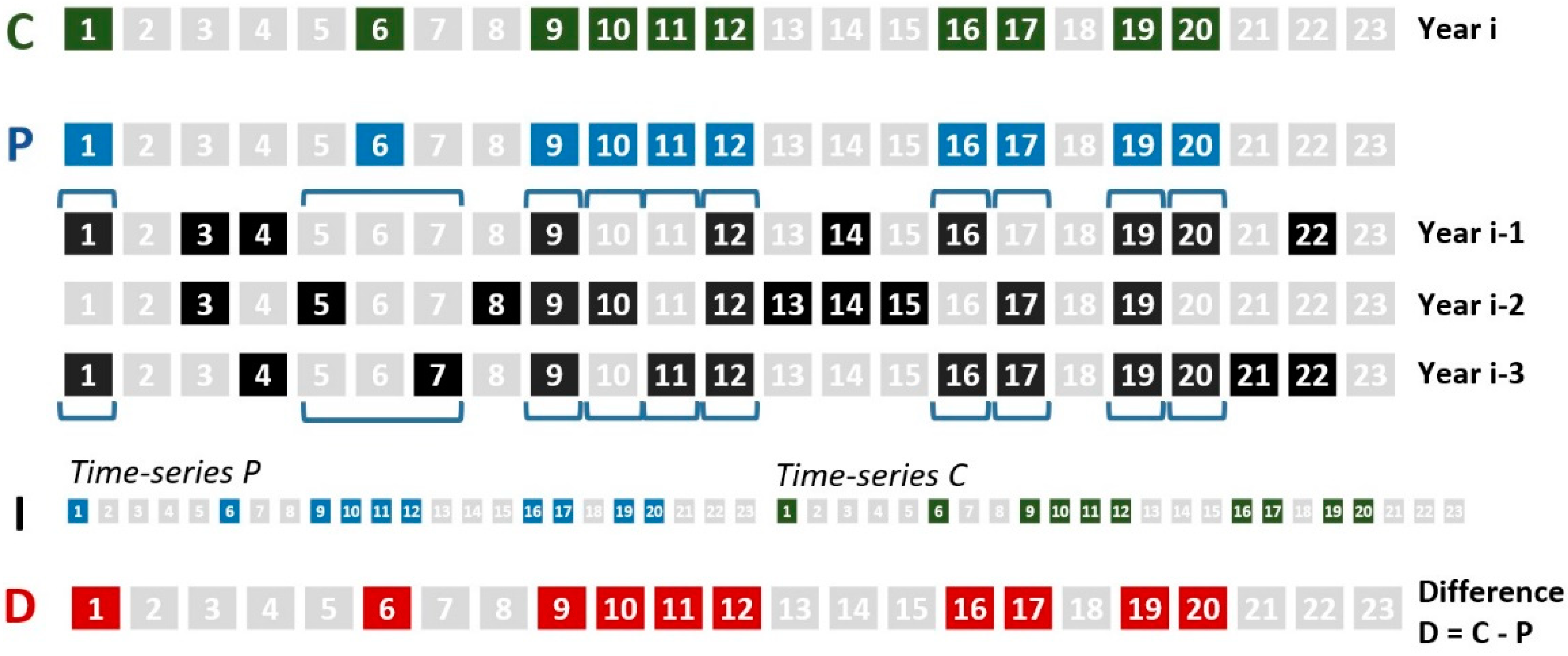
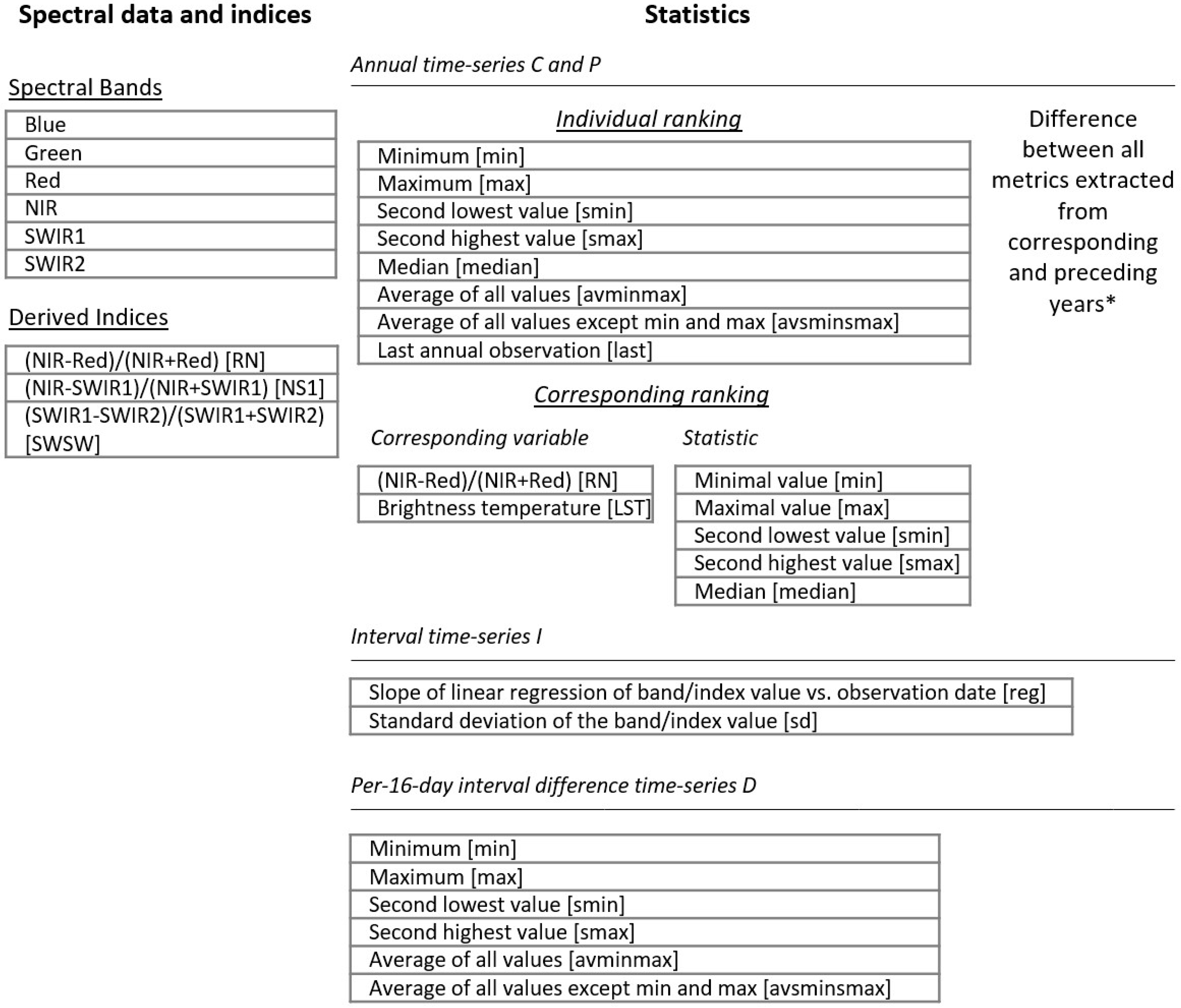
4.2. Annual Change Detection Metrics
- For the time-series C and P, we extract two independent sets of metrics that reflect annual phenology. Observations in each time-series are ranked by (a) spectral band or index value, and (b) corresponding NDVI and brightness temperature values. Similar to phenological metrics, we record selected ranks and average between ranks for each spectral variable.
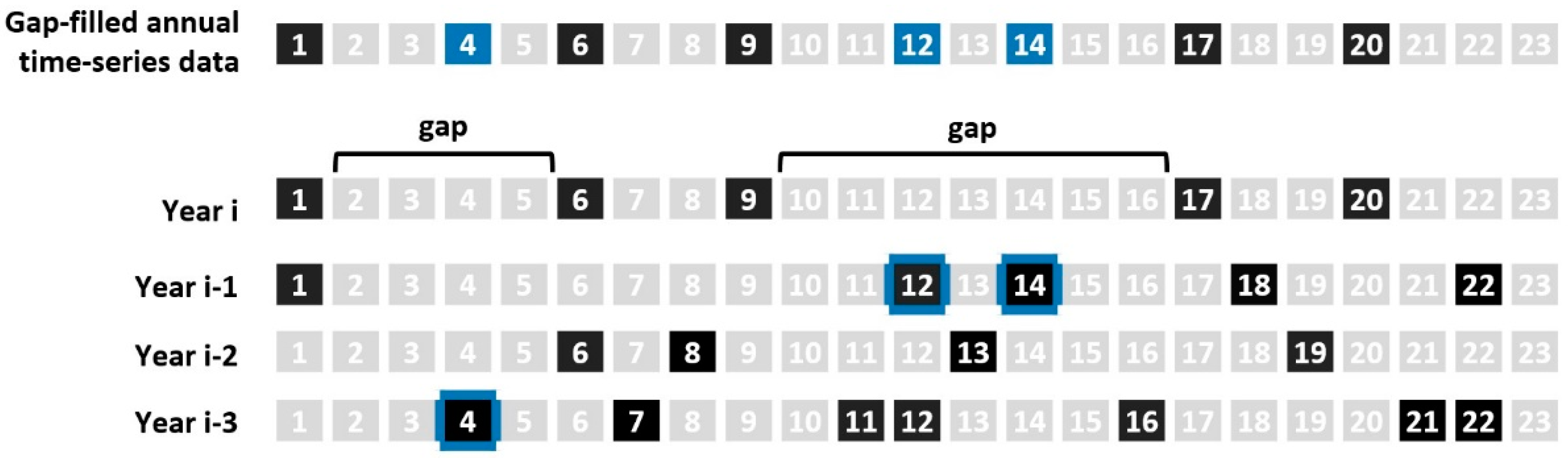
- The time-series I is used to analyze unidirectional trend of spectral reflectance within a two-years interval. We use least squares method to fit linear regression model that predicts spectral reflectance or index value from the observation date (date range is from 1 to 46) for clear-sky observations. We record the slope of linear regression as a metric value. In addition, we calculate and record standard deviation of spectral variable within the time-series I.
- The time-series D consists of per-16-day interval spectral reflectance or index differences. We rank difference values, and extract a set of statistics (selected ranks and averages) from these ranking.
5. Known Issues and Limitations
- The current version of the GLAD ARD product is not suitable for real-time land cover monitoring. The ARD product rely on Tier 1 data which currently features up to 26 days processing delay by USGS (https://www.usgs.gov/land-resources/nli/landsat/landsat-collection-1). A 16-day interval data are processed only after all daily data are available as Tier 1. Thus, the ARD update usually features a 1-month delay.
- Landsat 5 images for 2001–2002 were filtered for possible sensor artifacts during ARD processing. However, after examining images recently processed to Collection 1 standard we suggested that some of these artifacts were removed by the data provider. A re-processing of the year 2001 and 2002 ARD will be scheduled to include corrected L5 data.
- Images crossing the 180° meridian were not processed due to technical difficulties. This issue was not addressed yet due to low demand for the data in these regions. The images will be processed and the corresponding 16-day composites will be updated later.
- Due to low sun azimuth and similarity between snow cover and clouds during winter season in temperate and boreal climates, the GLAD Landsat ARD algorithm is not suitable for winter time image processing above 30N and below 45S Latitude. We are not processing images during times affected by seasonal snow cover so the resulting 16-day intervals have no data. Some of the images (and resulting 16-day composites) may still include snow-covered observations. We suggest further filtering such observations using the “snow/ice” observation quality flag or by removing certain 16-day intervals from data processing.
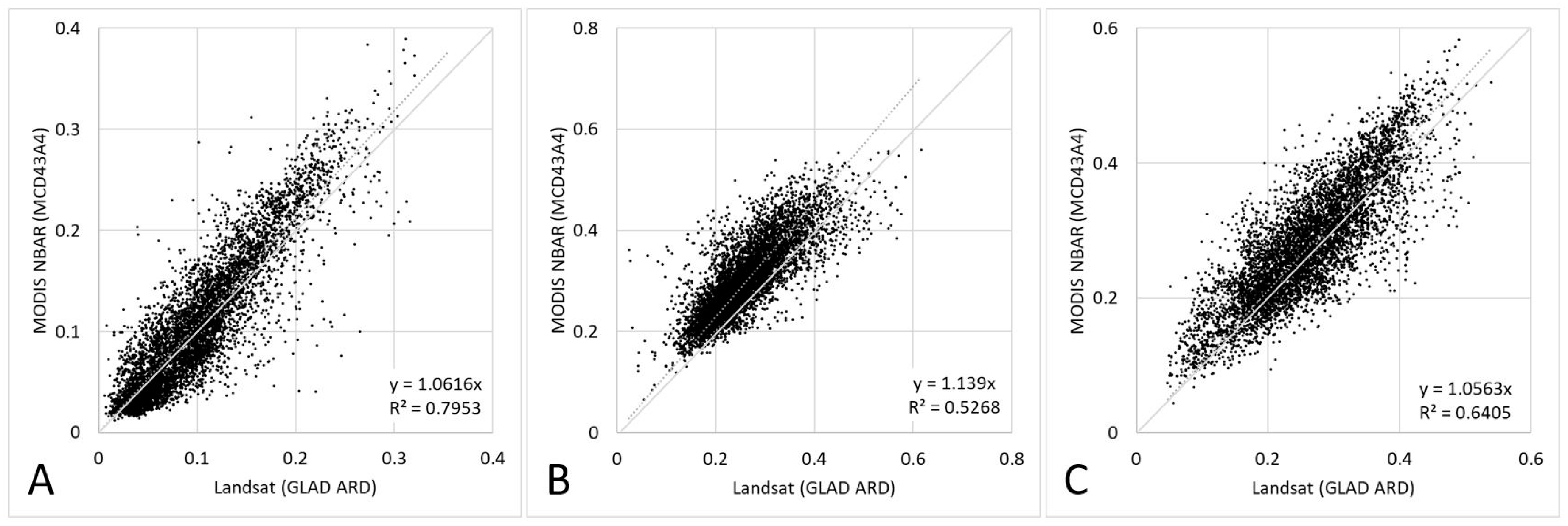
- The surface reflectance normalization is not equal to a physically-based atmospheric and surface anisotropy correction. While the comparison of ARD data with MODIS-based surface reflectance and successful ARD applications for global land cover mapping suggest that the product has sufficient quality for intended use, the ARD data may not be suitable for precise analysis of land surface reflectance.
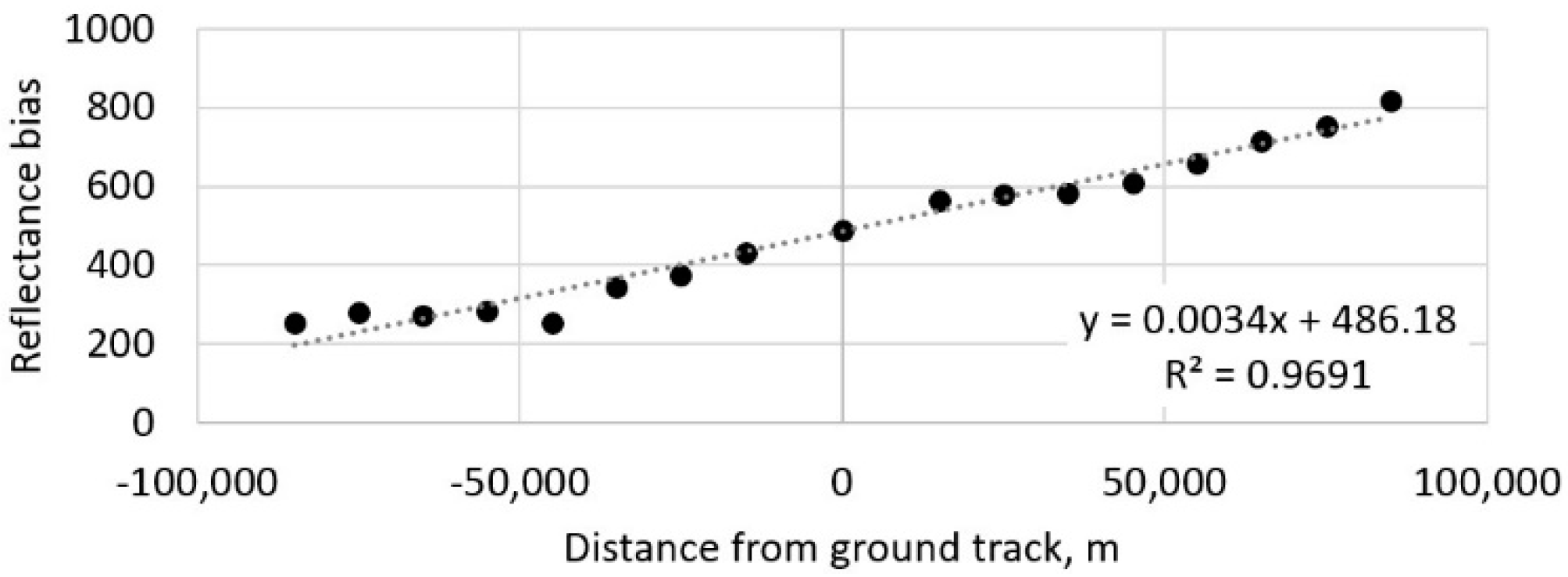
- Users should be aware that the image normalization method is not designed to deal with specular reflectance and thus introduces bias over the water surfaces. We do not recommend using the ARD product for water quality assessment or any other hydrology applications beyond surface water extent mapping.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Woodcock, C.E.; Allen, R.; Anderson, M.; Belward, A.; Bindschadler, R.; Cohen, W.; Gao, F.; Goward, S.N.; Helder, D.; Helmer, E.; et al. Free Access to Landsat Imagery. Science 2008, 320, 1011a. [Google Scholar] [CrossRef] [PubMed]
- USGS EROS. Landsat Collection 1 Level 1 Product Definition; USGS: Sioux Falls, SD, USA, 2017. [Google Scholar]
- Wulder, M.A.; Masek, J.G.; Cohen, W.B.; Loveland, T.R.; Woodcock, C.E. Opening the archive: How free data has enabled the science and monitoring promise of Landsat. Remote. Sens. Environ. 2012, 122, 2–10. [Google Scholar] [CrossRef]
- Wulder, M.A.; White, J.C.; Goward, S.N.; Masek, J.G.; Irons, J.R.; Herold, M.; Cohen, W.B.; Loveland, T.R.; Woodcock, C.E. Landsat continuity: Issues and opportunities for land cover monitoring. Remote. Sens. Environ. 2008, 112, 955–969. [Google Scholar] [CrossRef]
- Hansen, M.C.; Loveland, T.R. A review of large area monitoring of land cover change using Landsat data. Remote. Sens. Environ. 2012, 122, 66–74. [Google Scholar] [CrossRef]
- Hansen, M.C.; Potapov, P.V.; Moore, R.; Hancher, M.; Turubanova, S.A.; Tyukavina, A.; Thau, D.; Stehman, S.V.; Goetz, S.J.; Loveland, T.R.; et al. High-resolution global maps of 21st-century forest cover change. Science 2013, 342, 850–853. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pekel, J.-F.; Cottam, A.; Gorelick, N.; Belward, A.S. High-resolution mapping of global surface water and its long-term changes. Nature 2016, 540, 418–422. [Google Scholar] [CrossRef]
- Gong, P.; Li, X.; Wang, J.; Bai, Y.; Chen, B.; Hu, T.; Liu, X.; Xu, B.; Yang, J.; Zhang, W.; et al. Annual maps of global artificial impervious area (GAIA) between 1985 and 2018. Remote. Sens. Environ. 2020, 236, 111510. [Google Scholar] [CrossRef]
- Ying, Q.; Hansen, M.C.; Potapov, P.V.; Tyukavina, A.; Wang, L.; Stehman, S.V.; Moore, R.; Hancher, M. Global bare ground gain from 2000 to 2012 using Landsat imagery. Remote. Sens. Environ. 2017, 194, 161–176. [Google Scholar] [CrossRef] [Green Version]
- DeFries, R.S.; Townshend, J.R.G. NDVI-derived land cover classifications at a global scale. Int. J. Remote. Sens. 1994, 15, 3567–3586. [Google Scholar] [CrossRef]
- Loveland, T.R.; Belward, A.S. The IGBP-DIS global 1km land cover data set, DISCover: First results. Int. J. Remote. Sens. 1997, 18, 3289–3295. [Google Scholar] [CrossRef]
- Hansen, M.C.; DeFries, R.S.; Townshend, J.R.G.; Carroll, M.; Dimiceli, C.; Sohlberg, R.A. Global Percent Tree Cover at a Spatial Resolution of 500 Meters: First Results of the MODIS Vegetation Continuous Fields Algorithm. Earth Interact. 2003, 7, 1–15. [Google Scholar] [CrossRef] [Green Version]
- Justice, C.; Townshend, J.; Vermote, E.; Masuoka, E.; Wolfe, R.; Saleous, N.; Roy, D.; Morisette, J. An overview of MODIS Land data processing and product status. Remote. Sens. Environ. 2002, 83, 3–15. [Google Scholar] [CrossRef]
- Price, R.D.; King, M.D.; Dalton, J.T.; Pedelty, K.S.; Ardanuy, P.E.; Hobish, M.K. Earth science data for all: EOS and the EOS data and information system. Photogramm. Eng. Remote Sens. 1994, 60, 277–285. [Google Scholar]
- Roy, D.P.; Ju, J.; Kline, K.; Scaramuzza, P.L.; Kovalskyy, V.; Hansen, M.; Loveland, T.R.; Vermote, E.; Zhang, C. Web-enabled Landsat Data (WELD): Landsat ETM+ composited mosaics of the conterminous United States. Remote Sens. Environ. 2010, 114, 35–49. [Google Scholar] [CrossRef]
- Dwyer, J.L.; Roy, D.P.; Sauer, B.; Jenkerson, C.B.; Zhang, H.K.; Lymburner, L. Analysis Ready Data: Enabling Analysis of the Landsat Archive. Remote Sens. 2018, 10, 1363. [Google Scholar]
- Frantz, D. FORCE—Landsat + Sentinel-2 Analysis Ready Data and Beyond. Remote Sens. 2019, 11, 1124. [Google Scholar] [CrossRef] [Green Version]
- Hansen, M.C.; Roy, D.P.; Lindquist, E.; Adusei, B.; Justice, C.O.; Altstatt, A. A method for integrating MODIS and Landsat data for systematic monitoring of forest cover and change in the Congo Basin. Remote. Sens. Environ. 2008, 112, 2495–2513. [Google Scholar] [CrossRef]
- Potapov, P.; Tyukavina, A.; Turubanova, S.; Talero, Y.; Hernandez-Serna, A.; Hansen, M.; Saah, D.; Tenneson, K.; Poortinga, A.; Aekakkararungroj, A.; et al. Annual continuous fields of woody vegetation structure in the Lower Mekong region from 2000–2017 Landsat time-series. Remote. Sens. Environ. 2019, 232, 111278. [Google Scholar] [CrossRef]
- Potapov, P.V.; Turubanova, S.A.; Hansen, M.C.; Adusei, B.; Broich, M.; Altstatt, A.; Mane, L.; Justice, C.O. Quantifying forest cover loss in Democratic Republic of the Congo, 2000–2010, with Landsat ETM+ data. Remote Sens. Environ. 2012, 122, 106–116. [Google Scholar] [CrossRef]
- Pickens, A.H.; Hansen, M.; Hancher, M.; Potapov, P. Monitoring the dynamics of global surface water 1999–2017. In Proceedings of the AGU Fall Meeting, Washington, DC, USA, 9–14 December 2018. [Google Scholar]
- Chavez, P.S. An improved dark-object subtraction technique for atmospheric scattering correction of multispectral data. Remote. Sens. Environ. 1988, 24, 459–479. [Google Scholar] [CrossRef]
- Song, X.-P.; Potapov, P.V.; Krylov, A.; King, L.; Di Bella, C.M.; Hudson, A.; Khan, A.; Adusei, B.; Stehman, S.V.; Hansen, M.C. National-scale soybean mapping and area estimation in the United States using medium resolution satellite imagery and field survey. Remote. Sens. Environ. 2017, 190, 383–395. [Google Scholar] [CrossRef]
- Chander, G.; Markham, B.L.; Helder, D.L. Summary of current radiometric calibration coefficients for Landsat MSS, TM, ETM+, and EO-1 ALI sensors. Remote Sens. Environ. 2009, 113, 893–903. [Google Scholar] [CrossRef]
- Foga, S.; Scaramuzza, P.L.; Guo, S.; Zhu, Z.; Dilley, R.D.; Beckmann, T.; Schmidt, G.L.; Dwyer, J.L.; Hughes, M.J.; Laue, B. Cloud detection algorithm comparison and validation for operational Landsat data products. Remote. Sens. Environ. 2017, 194, 379–390. [Google Scholar] [CrossRef] [Green Version]
- Zhu, Z.; Wang, S.; Woodcock, C.E. Improvement and expansion of the Fmask algorithm: cloud, cloud shadow, and snow detection for Landsats 4–7, 8, and Sentinel 2 images. Remote. Sens. Environ. 2015, 159, 269–277. [Google Scholar] [CrossRef]
- Department of the Interior U.S. Geological Survey. Landsat 8 Data Users Handbook (LSDS-1574 Version 5.0); USGS: Sioux Falls, SD, USA, 2019.
- Breiman, L.; Friedman, J.; Stone, C.J.; Olshen, R.A. Classification and Regression Trees; Taylor & Francis Group (CRC Press): Abingdon, UK, 1984. [Google Scholar]
- Potapov, P.V.; Turubanova, S.A.; Tyukavina, A.; Krylov, A.M.; McCarty, J.L.; Radeloff, V.C.; Hansen, M.C. Eastern Europe’s forest cover dynamics from 1985 to 2012 quantified from the full Landsat archive. Remote Sens. Environ. 2015, 159, 28–43. [Google Scholar] [CrossRef]
- Masek, J.; Vermote, E.; Saleous, N.; Wolfe, R.; Hall, F.; Huemmrich, K.; Gao, F.; Kutler, J.; Lim, T.-K. A Landsat Surface Reflectance Dataset for North America, 1990–2000. IEEE Geosci. Remote. Sens. Lett. 2006, 3, 68–72. [Google Scholar] [CrossRef]
- Schaaf, C.B.; Gao, F.; Strahler, A.H.; Lucht, W.; Li, X.; Tsang, T.; Strugnell, N.C.; Zhang, X.; Jin, Y.; Muller, J.-P.; et al. First operational BRDF, albedo nadir reflectance products from MODIS. Remote. Sens. Environ. 2002, 83, 135–148. [Google Scholar] [CrossRef] [Green Version]
- Vermote, E.F.; El Saleous, N.Z.; O Justice, C. Atmospheric correction of MODIS data in the visible to middle infrared: first results. Remote. Sens. Environ. 2002, 83, 97–111. [Google Scholar] [CrossRef]
- Carroll, M.; Townshend, J.; Hansen, M.; Dimiceli, C.; Sohlberg, R.; Wurster, K. MODIS vegetative cover conversion and vegetation continuous fields. In Remote Sensing and Digital Image Processing; Springer: New York, NY, USA, 2011; Volume 11. [Google Scholar]
- Huete, A.; Justice, C.; Van Leeuwen, W. MODIS vegetation index (MOD13). Algorithm Theor. Basis Doc. 1999, 3, 213. [Google Scholar]
- Malingreau, J.-P. Global vegetation dynamics: satellite observations over Asia. Int. J. Remote. Sens. 1986, 7, 1121–1146. [Google Scholar] [CrossRef]
- Badhwar, G. Classification of corn and soybeans using multitemporal thematic mapper data. Remote. Sens. Environ. 1984, 16, 175–181. [Google Scholar] [CrossRef]
- Holben, B.N. Characteristics of maximum-value composite images from temporal AVHRR data. Int. J. Remote. Sens. 1986, 7, 1417–1434. [Google Scholar] [CrossRef]
- DeFries, R.; Hansen, M.; Townshend, J. Global discrimination of land cover types from metrics derived from AVHRR pathfinder data. Remote. Sens. Environ. 1995, 54, 209–222. [Google Scholar] [CrossRef]
- Hansen, M.C.; Stehman, S.V.; Potapov, P.V. Quantification of global gross forest cover loss. Proc. Natl. Acad. Sci. 2010, 107, 8650–8655. [Google Scholar] [CrossRef] [Green Version]
- Potapov, P.; Siddiqui, B.N.; Iqbal, Z.; Aziz, T.; Zzaman, B.; Islam, A.; Pickens, A.; Talero, Y.; Tyukavina, A.; Turubanova, S.; et al. Comprehensive monitoring of Bangladesh tree cover inside and outside of forests, 2000–2014. Environ. Res. Lett. 2017, 12, 104015. [Google Scholar] [CrossRef]
- Coulter, L.L.; Stow, D.A.; Tsai, Y.H.; Ibanez, N.; Shih, H.C.; Kerr, A.; Benza, M.; Weeks, J.R.; Mensah, F. Classification and assessment of land cover and land use change in southern Ghana using dense stacks of Landsat 7 ETM+ imagery. Remote Sens. Environ. 2016, 184, 396–409. [Google Scholar] [CrossRef]
- King, L.; Adusei, B.; Stehman, S.V.; Potapov, P.V.; Song, X.-P.; Krylov, A.; Di Bella, C.; Loveland, T.R.; Johnson, D.M.; Hansen, M.C. A multi-resolution approach to national-scale cultivated area estimation of soybean. Remote. Sens. Environ. 2017, 195, 13–29. [Google Scholar] [CrossRef]
- Khan, A.; Hansen, M.C.; Potapov, P.V.; Adusei, B.; Pickens, A.; Krylov, A.; Stehman, S.V. Evaluating Landsat and RapidEye Data for Winter Wheat Mapping and Area Estimation in Punjab, Pakistan. Remote. Sens. 2018, 10, 489. [Google Scholar] [CrossRef] [Green Version]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Band Name | Wavelength, nm | |||
|---|---|---|---|---|
| Landsat 5 TM | Landsat 7 ETM+ | Landsat 8 OLI/TIRS | MODIS | |
| Blue | 450–520 | 441–514 | 452–512 | 459–479 |
| Green | 520–600 | 519–601 | 533–590 | 545–565 |
| Red | 630–690 | 631–692 | 636–673 | 620–670 |
| Near-Infrared (NIR) | 760–900 | 772–898 | 851–879 | 841–876 |
| Shortwave Infrared 1 (SWIR1) | 1,550–1,750 | 1,547–1,749 | 1,566–1,651 | 1,628–1,652 |
| Shortwave Infrared 2 (SWIR2) | 2,080–2,350 | 2,064–2,345 | 2,107–2,294 | 2,105–2,155 |
| Thermal | 10,410–12,500 | 10,310–12,360 | 10,600–11,190 | 10,780–11,280 |
| Detected by Both Algorithms | Detected Only by the GLAD Algorithm | Detected Only by the CFMask Algorithm | |
|---|---|---|---|
| Clouds | 85.9 | 10.1 | 3.9 |
| Cloud shadows | 41.8 | 26.0 | 32.3 |
| QF | Observation Quality | QF Assignment Criteria |
|---|---|---|
| 0 | No Data | |
| 1 | Land | Clear-sky land observation. |
| 2 | Water | Clear-sky water observation. |
| 3 | Cloud | Cloud detected. |
| 4 | Cloud shadow | Shadow detected. The pixels located within the projection of a detected cloud. Cloud projection defined using solar elevation and azimuth and limited to 9 km distance from the cloud. |
| 5 | Topographic shadow | Shadow detected. The pixel located outside cloud projections and within estimated topographic shadow (estimated using DEM and solar elevation and azimuth). |
| 6 | Snow/Ice | Snow or ice detected. |
| 7 | Haze | Dense semi-transparent clouds/fog detected. |
| 8 | Cloud proximity | Aggregation (OR) of two rules: (i) 1-pixel buffer around detected clouds. (ii) Above-zero cloud likelihood (estimated by GLAD cloud detection model) within 3-pixel buffer around detected clouds. |
| 9 | Shadow proximity | Shadow likelihood (estimated by GLAD shadow detection model) above 10% for pixels either (i) located within the projection of a detected cloud; OR (ii) within 3 pixels of a detected cloud or cloud shadow. |
| 10 | Other shadows | Shadow detected. The pixel located outside the projection of a detected cloud and outside of estimated topographic shadow. |
| 11 | Additional cloud proximity over land | Clear-sky land pixels located closer than 7 pixels of detected clouds |
| 12 | Additional cloud proximity over water | Clear-sky water pixels located closer than 7 pixels of detected clouds |
| 14 | Additional shadow proximity over land | Clear-sky land pixels located closer than 7 pixels of detected cloud shadows |
| 15 | Same as code 1. Land | Codes 15-17 are identical to codes 1, 11 and 14 except for the presence of water in a given 16-day composite. These codes indicate that water was detected in this 16-day interval, but was not used for compositing, because a land observation was also present within the same 16 days. Such conditions may occur within intermittent water bodies, wetlands, rice paddies, etc. These codes are created to facilitate the analysis of water dynamics. |
| 16 | Same as code 11. Additional cloud proximity over land | |
| 17 | Same as code 14. Additional shadow proximity over land |
| Landsat Spectral Band | Coefficient G (Gain) | Coefficient B (Bias) | ||
|---|---|---|---|---|
| Mean | SD | Mean | SD | |
| Blue | 0.002 | 0.003 | 2849 | 615 |
| Green | 0.002 | 0.003 | 1075 | 513 |
| Red | 0.002 | 0.003 | 675 | 674 |
| NIR | 0.003 | 0.005 | 415 | 1022 |
| SWIR1 | 0.003 | 0.005 | −652 | 937 |
| SWIR2 | 0.002 | 0.005 | −677 | 1187 |
| Interval ID | DOY Start | DOY End |
|---|---|---|
| 1 | 1 | 16 |
| 2 | 17 | 32 |
| 3 | 33 | 48 |
| 4 | 49 | 64 |
| 5 | 65 | 80 |
| 6 | 81 | 96 |
| 7 | 97 | 112 |
| 8 | 113 | 128 |
| 9 | 129 | 144 |
| 10 | 145 | 160 |
| 11 | 161 | 176 |
| 12 | 177 | 192 |
| 13 | 193 | 208 |
| 14 | 209 | 224 |
| 15 | 225 | 240 |
| 16 | 241 | 256 |
| 17 | 257 | 272 |
| 18 | 273 | 288 |
| 19 | 289 | 304 |
| 20 | 305 | 320 |
| 21 | 321 | 336 |
| 22 | 337 | 352 |
| 23 | 353 | 365 (366) |
| Image Band | Image Data | Units, Data Format |
|---|---|---|
| 1 | Blue band | Normalized surface reflectance scaled to the range from 1 to 40,000, UInt16 |
| 2 | Green band | |
| 3 | Red band | |
| 4 | NIR band | |
| 5 | SWIR1 band | |
| 6 | SWIR2 band | |
| 7 | Normalized brightness temperature | K × 100, UInt16 |
| 8 | Observation quality flag (QF) | QF code, UInt16 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Potapov, P.; Hansen, M.C.; Kommareddy, I.; Kommareddy, A.; Turubanova, S.; Pickens, A.; Adusei, B.; Tyukavina, A.; Ying, Q. Landsat Analysis Ready Data for Global Land Cover and Land Cover Change Mapping. Remote Sens. 2020, 12, 426. https://doi.org/10.3390/rs12030426
Potapov P, Hansen MC, Kommareddy I, Kommareddy A, Turubanova S, Pickens A, Adusei B, Tyukavina A, Ying Q. Landsat Analysis Ready Data for Global Land Cover and Land Cover Change Mapping. Remote Sensing. 2020; 12(3):426. https://doi.org/10.3390/rs12030426
Chicago/Turabian StylePotapov, Peter, Matthew C. Hansen, Indrani Kommareddy, Anil Kommareddy, Svetlana Turubanova, Amy Pickens, Bernard Adusei, Alexandra Tyukavina, and Qing Ying. 2020. "Landsat Analysis Ready Data for Global Land Cover and Land Cover Change Mapping" Remote Sensing 12, no. 3: 426. https://doi.org/10.3390/rs12030426