Improved 3D Stem Mapping Method and Elliptic Hypothesis-Based DBH Estimation from Terrestrial Laser Scanning Data

Abstract
:
1. Introduction
2. Materials and Methods
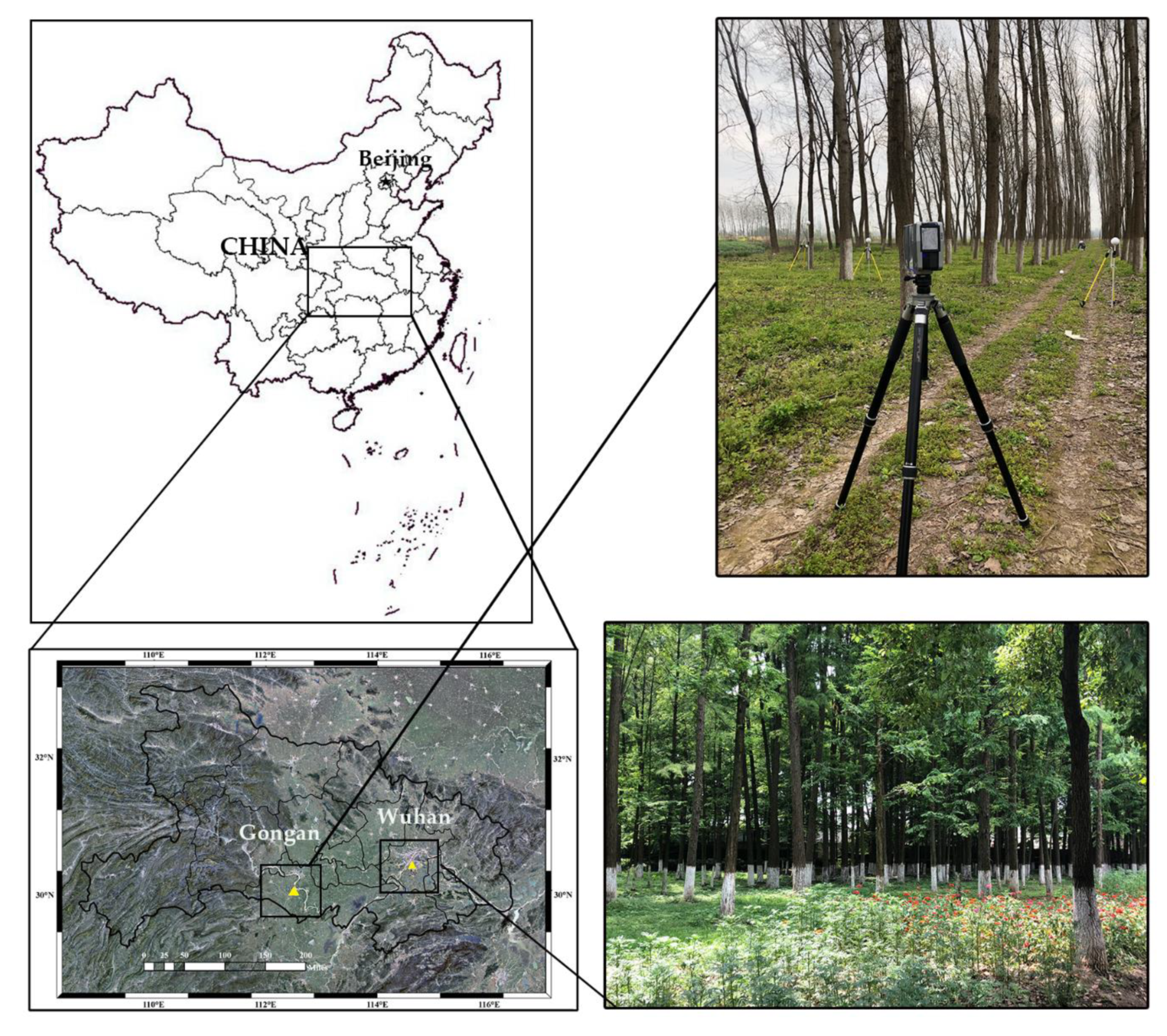
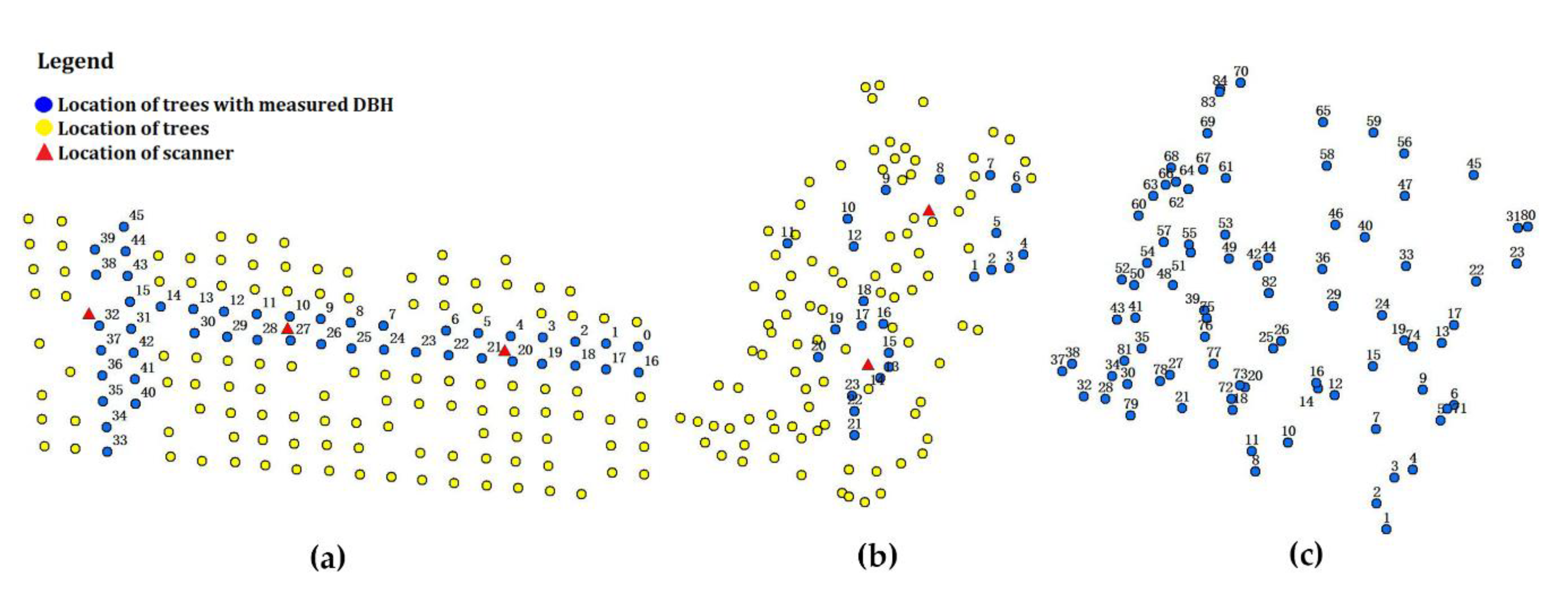
2.1. Research Plot and Data Description
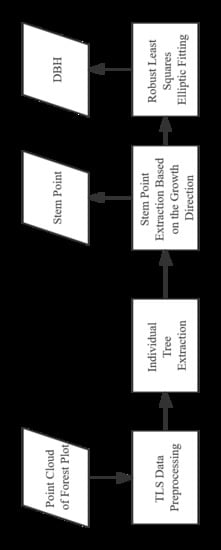
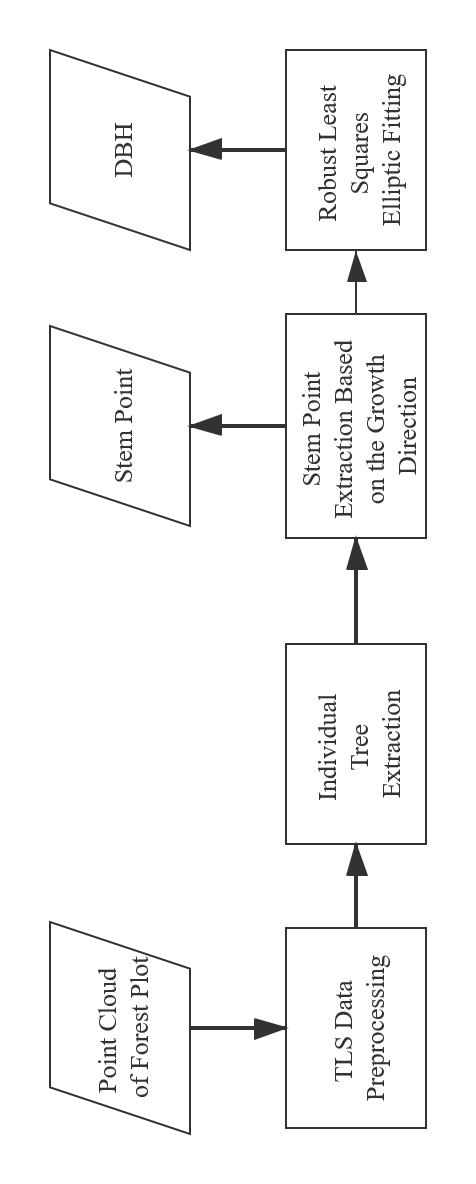
2.2. TLS Data Preprocessing
2.2.1. Co-Registration, Ground Filtering, and TLS Data Thinning
2.2.2. Individual Tree Extraction
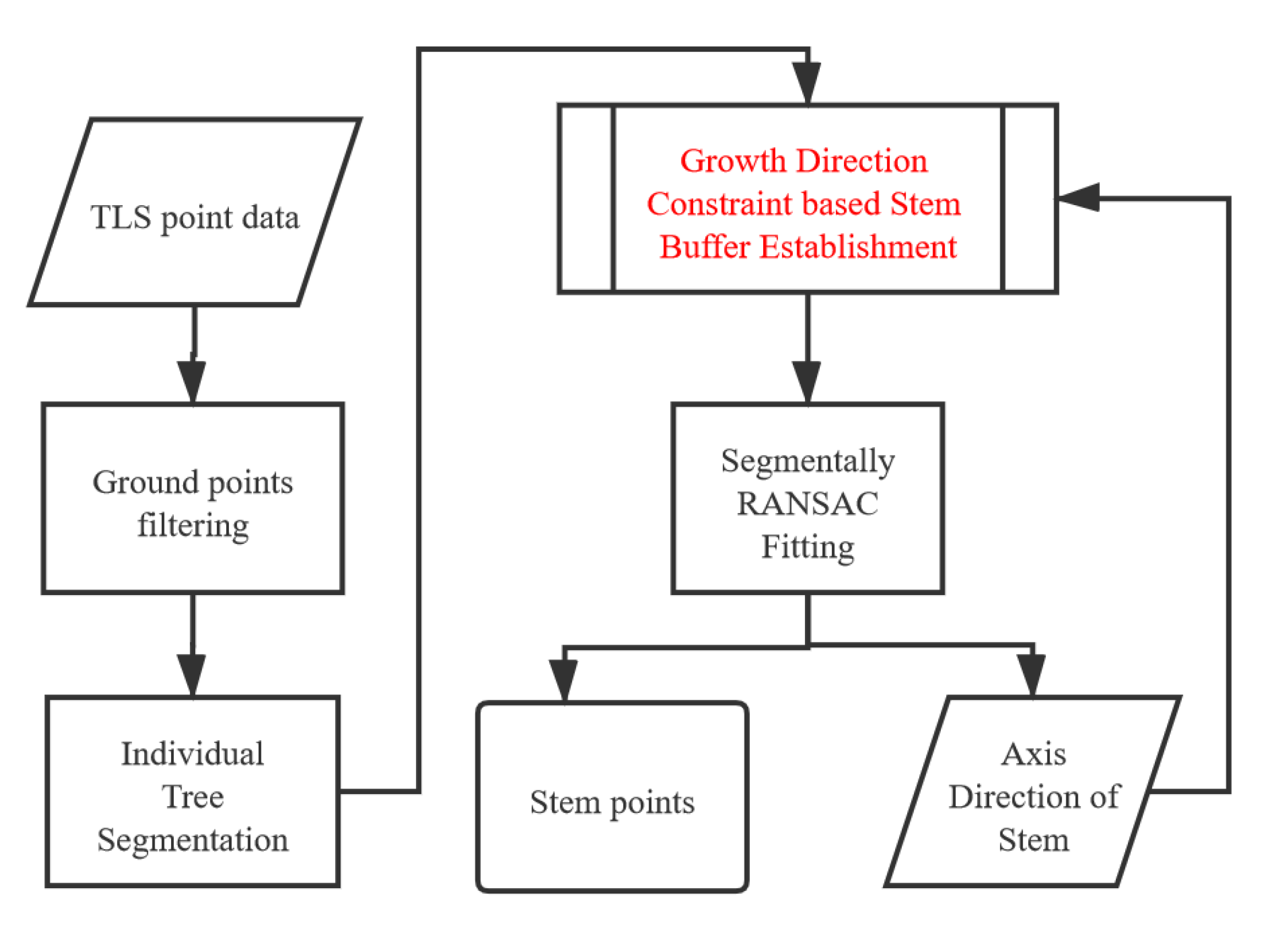
2.3. Stem Point Extraction Based on the Growth Direction
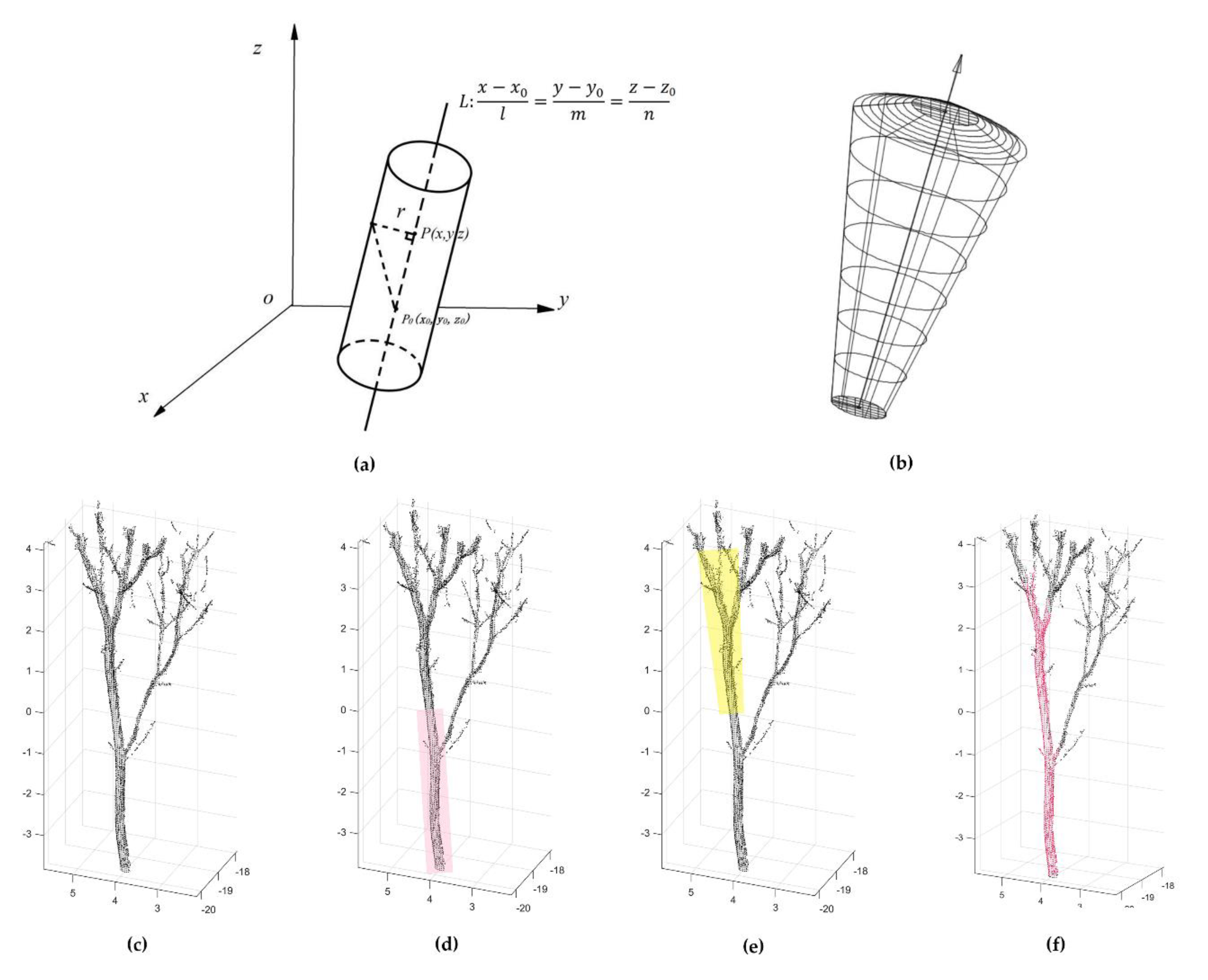
- As Figure 4b shows, a frustum buffer was established by the coordinates of a point on the axis, and . The frustum buffer can be regarded as the result of the angle of rotation of the fitted RANSAC cylinder around the central axis of the cylinder;
- As shown in Figure 4d, the pink cylinder is represented by the RANSAC cylinder that best fits the trunk of this section. The inside point of the RANSAC cylindrical model is considered the stem point;
- As shown in Figure 4e, the yellow area in the figure is a frustum buffer created based on the cylinder parameters provided by the RANSAC cylinder; and
- Figure 4f shows that the central trunk components of tree clustering were extracted layer by layer with fixed steps. By splicing the extraction results of each layer together, the splicing results can be regarded as the trunk of an individual tree.
2.4. Robust Least Squares Elliptic Fitting for DBH Estimation
2.5. Evaluation Methods
3. Results
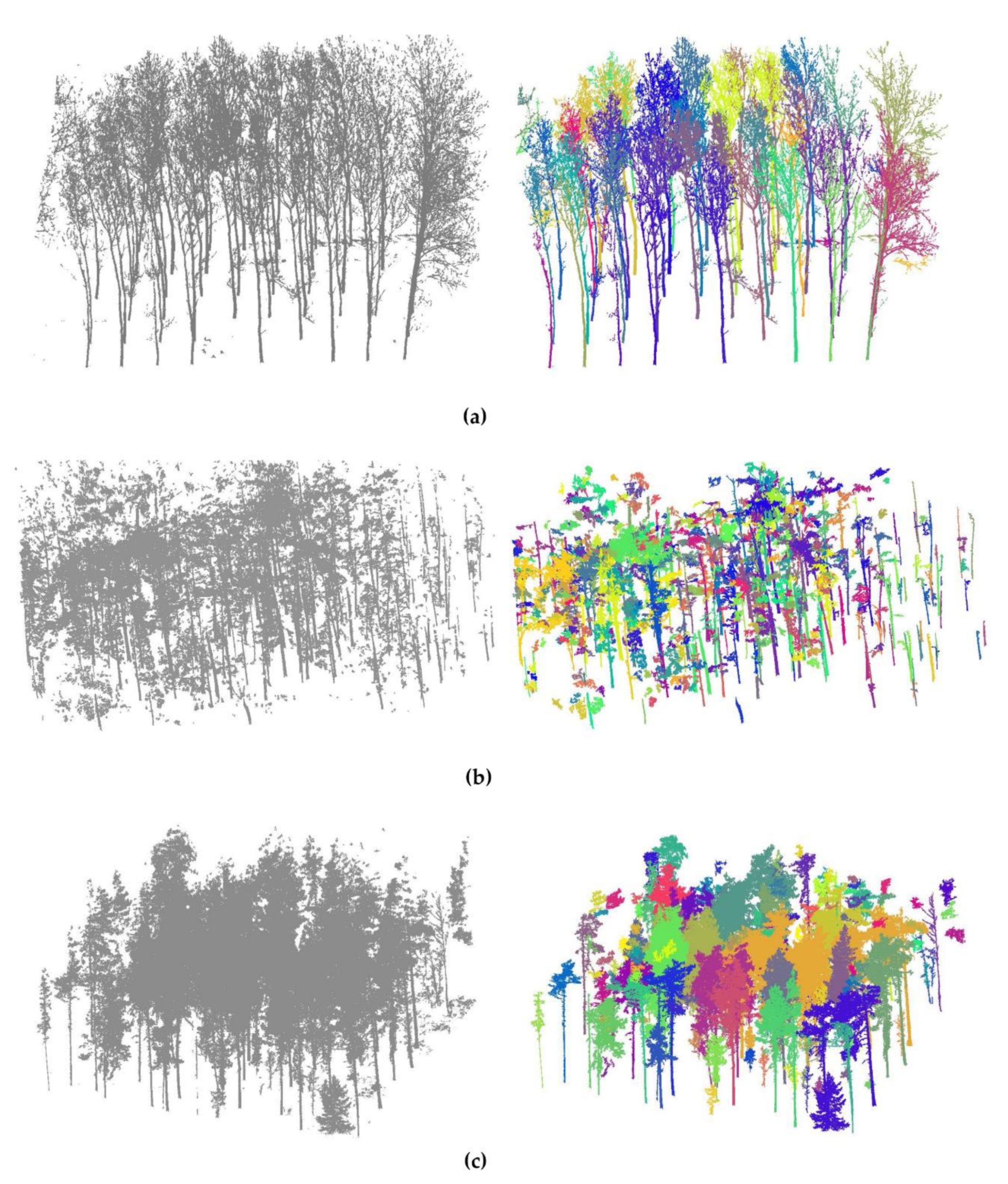
3.1. Individual Tree Extraction Result
3.2. Stem Point Extraction Result
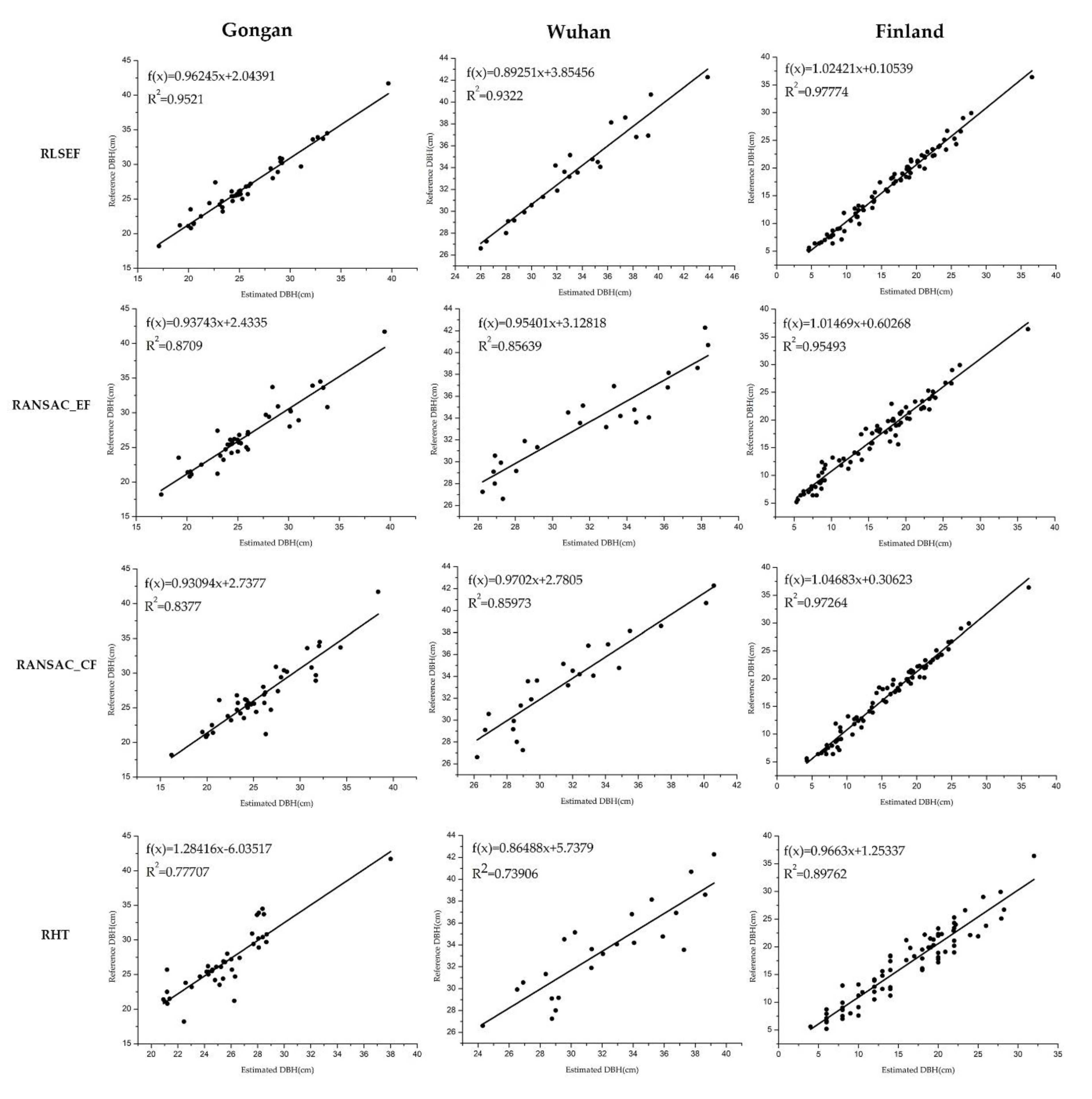
3.3. DBH Estimation Result
4. Discussion
5. Conclusions
- With the combination of the tree growth direction and the sectional RANSAC cylindrical fitting method, the integrity of stem extraction is improved compared with that without considering the growth direction. Therefore, the growth direction is an important attribute of the stem and should be considered in stem extraction methods;
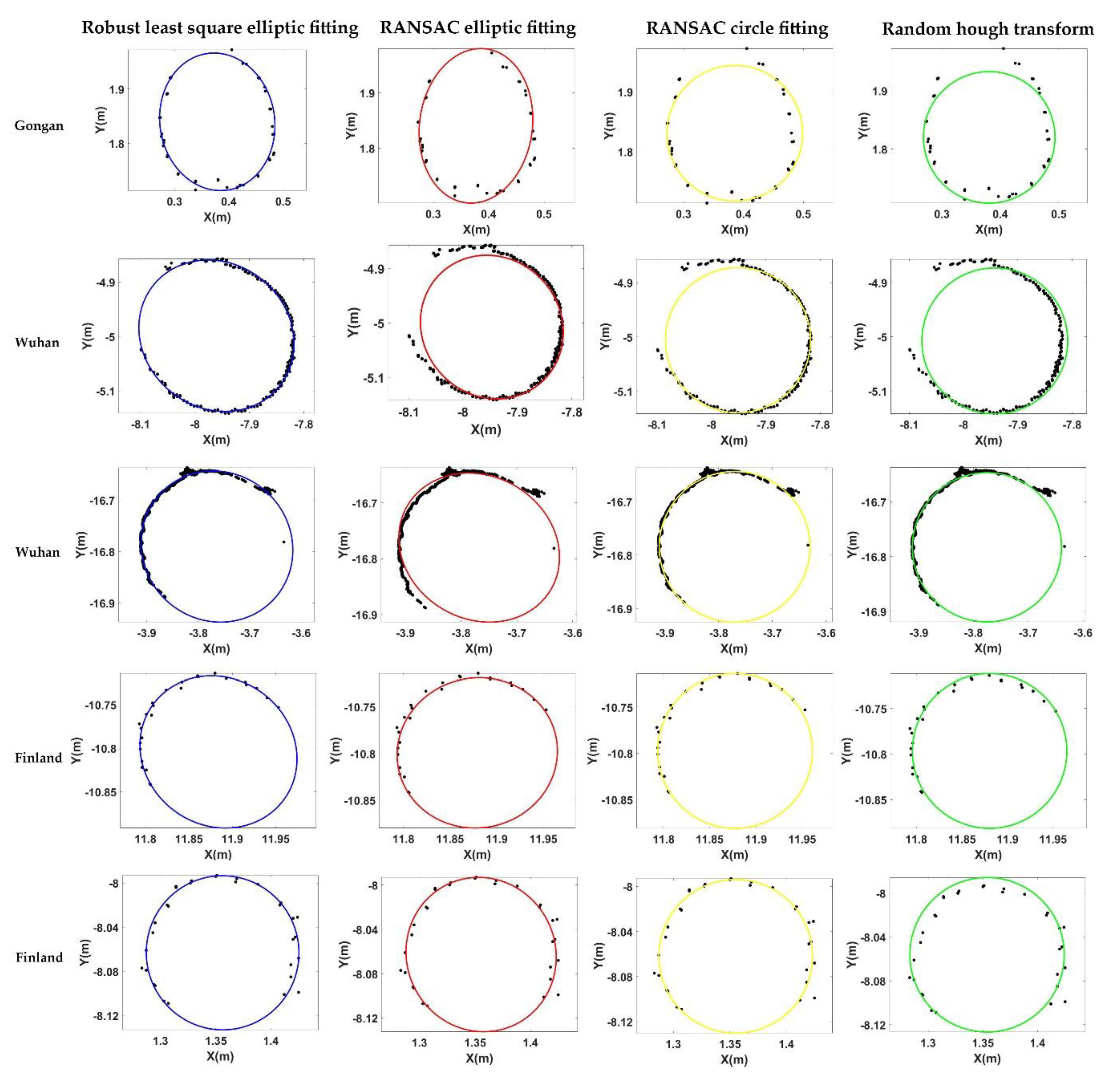
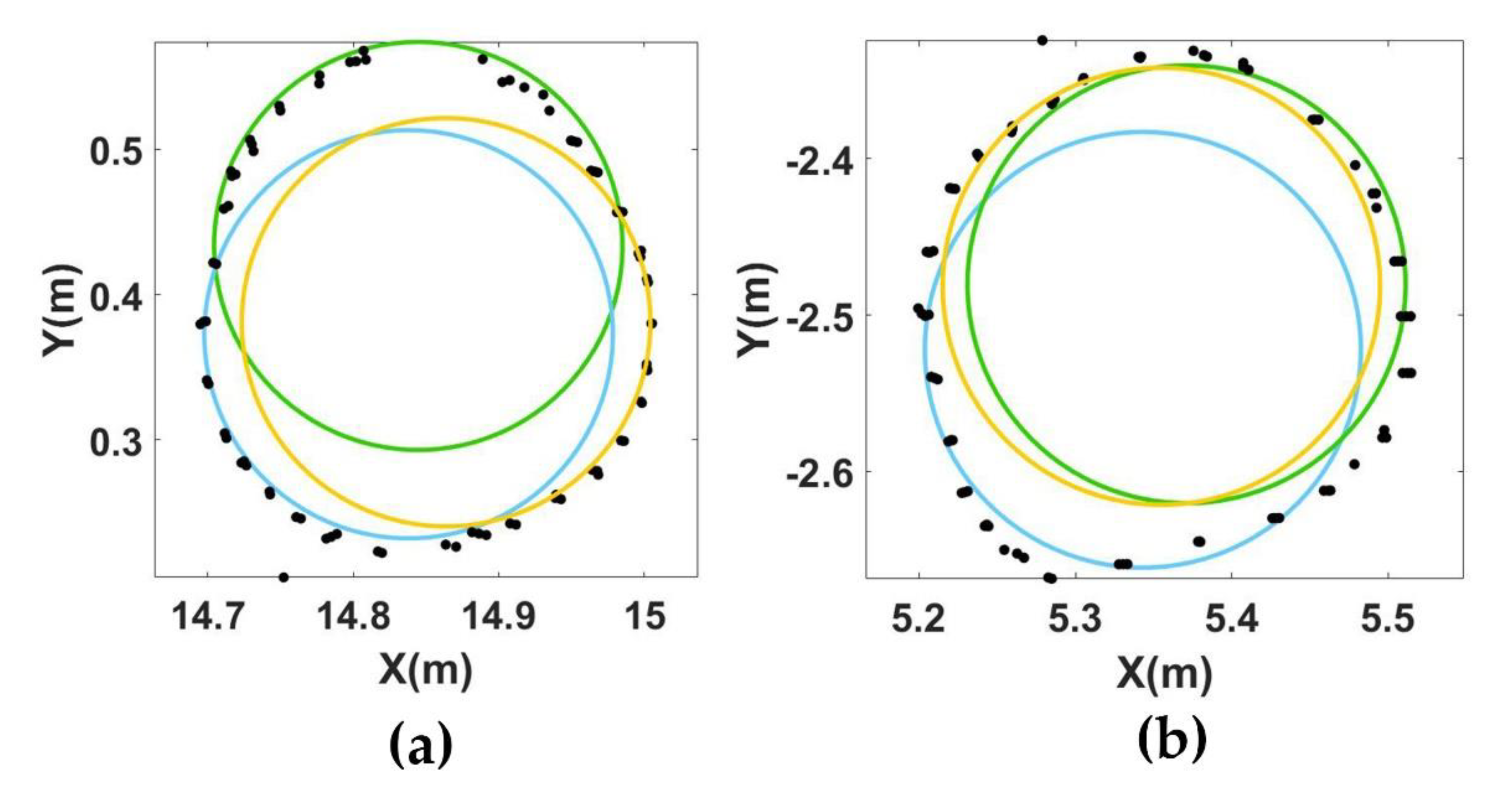
- Compared with the circular model, the elliptic model can describe the stem section better, and the DBH estimation accuracy based on the elliptic fitting method is higher than that based on circular fitting methods; and
- Compared with other algorithms, the robust least square ellipse fitting method has performed best in the estimation of DBH, with an average RMSE of 1.14 cm, which can greatly improve the accuracy of DBH estimation based on TLS.
Author Contributions
Funding
Conflicts of Interest
References
- Dassot, M.; Constant, T.; Fournier, M. The use of terrestrial LiDAR technology in forest science: Application fields, benefits and challenges. Ann. For. Sci. 2011, 68, 959–974. [Google Scholar] [CrossRef] [Green Version]
- Liang, X.; Kankare, V.; Hyyppä, J.; Wang, Y.; Kukko, A.; Haggrén, H.; Yu, X.; Kaartinen, H.; Jaakkola, A.; Guan, F.; et al. Terrestrial laser scanning in forest inventories. ISPRS J. Photogramm. Remote Sens. 2016, 115, 63–77. [Google Scholar] [CrossRef]
- Liu, C.; Xing, Y.; Duanmu, J.; Tian, X. Evaluating Different Methods for Estimating Diameter at Breast Height from Terrestrial Laser Scanning. Remote Sens. 2018, 10, 513. [Google Scholar] [CrossRef] [Green Version]
- de Conto, T.; Olofsson, K.; Görgens, E.B.; Rodriguez, L.C.E.; Almeida, G. Performance of stem denoising and stem modelling algorithms on single tree point clouds from terrestrial laser scanning. Comput. Electron. Agric. 2017, 143, 165–176. [Google Scholar] [CrossRef]
- Edson, C.; Wing, M.G. Airborne Light Detection and Ranging (LiDAR) for Individual Tree Stem Location, Height, and Biomass Measurements. Remote Sens. 2011, 3, 2494–2528. [Google Scholar] [CrossRef] [Green Version]
- Liang, X.; Kukko, A.; Hyyppä, J.; Lehtomäki, M.; Pyörälä, J.; Yu, X.; Kaartinen, H.; Jaakkola, A.; Wang, Y. In-situ measurements from mobile platforms: An emerging approach to address the old challenges associated with forest inventories. ISPRS J. Photogramm. Remote Sens. 2018, 143, 97–107. [Google Scholar] [CrossRef]
- Cabo, C.; Ordóñez, C.; López-Sánchez, C.A.; Armesto, J. Automatic dendrometry: Tree detection, tree height and diameter estimation using terrestrial laser scanning. Int. J. Appl. Earth Obs. Geoinf. 2018, 69, 164–174. [Google Scholar] [CrossRef]
- Olofsson, K.; Holmgren, J.; Olsson, H. Tree Stem and Height Measurements using Terrestrial Laser Scanning and the RANSAC Algorithm. Remote Sens. 2014, 6, 4323–4344. [Google Scholar] [CrossRef] [Green Version]
- Bu, G.; Wang, P. Adaptive circle-ellipse fitting method for estimating tree diameter based on single terrestrial laser scanning. J. Appl. Remote Sens. 2016, 10, 6040. [Google Scholar] [CrossRef]
- Thomas, S.M. A simple approach for the estimation of circular arc center and its radius. Comput. Vis. Graph. Image Process. 1989, 45, 362–370. [Google Scholar] [CrossRef]
- Čerňava, J.; Mokroš, M.; Tuček, J.; Antal, M.; Slatkovská, Z. Processing Chain for Estimation of Tree Diameter from GNSS-IMU-Based Mobile Laser Scanning Data. Remote Sens. 2019, 11, 615. [Google Scholar] [CrossRef] [Green Version]
- Xinlian, L.; Kankare, V.; Xiaowei, Y.; Hyyppa, J.; Holopainen, M. Automated Stem Curve Measurement Using Terrestrial Laser Scanning. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1739–1748. [Google Scholar] [CrossRef]
- Itakura, K.; Hosoi, F. Automatic individual tree detection and canopy segmentation from three-dimensional point cloud images obtained from ground-based lidar. J. Agric. Meteorol. 2018, 74, 109–113. [Google Scholar] [CrossRef] [Green Version]
- Brede, B.; Lau, A.; Bartholomeus, H.M.; Kooistra, L. Comparing RIEGL RiCOPTER UAV LiDAR Derived Canopy Height and DBH with Terrestrial LiDAR. Sensors 2017, 17, 2371. [Google Scholar] [CrossRef] [PubMed]
- Brede, B.; Calders, K.; Lau, A.; Raumonen, P.; Bartholomeus, H.M.; Herold, M.; Kooistra, L. Non-destructive tree volume estimation through quantitative structure modelling: Comparing UAV laser scanning with terrestrial LIDAR. Remote Sens. Environ. 2019, 233, 1355. [Google Scholar] [CrossRef]
- Tao, S.; Guo, Q.; Li, L.; Xue, B.; Kelly, M.; Li, W.; Xu, G.; Su, Y. Airborne Lidar-derived volume metrics for aboveground biomass estimation: A comparative assessment for conifer stands. Agric. For. Meteorol. 2014, 198–199, 24–32. [Google Scholar] [CrossRef]
- Fernández-Sarría, A.; López-Cortés, I.; Estornell, J.; Velázquez-Martí, B.; Salazar, D. Estimating residual biomass of olive tree crops using terrestrial laser scanning. Int. J. Appl. Earth Obs. Geoinf. 2019, 75, 163–170. [Google Scholar] [CrossRef]
- He, Q.; Chen, E.; An, R.; Li, Y. Above-Ground Biomass and Biomass Components Estimation Using LiDAR Data in a Coniferous Forest. Forests 2013, 4, 984–1002. [Google Scholar] [CrossRef] [Green Version]
- Nie, S.; Wang, C.; Zeng, H.; Xi, X.; Li, G. Above-ground biomass estimation using airborne discrete-return and full-waveform LiDAR data in a coniferous forest. Ecol. Indic. 2017, 78, 221–228. [Google Scholar] [CrossRef]
- Koreň, M.; Mokroš, M.; Bucha, T. Accuracy of tree diameter estimation from terrestrial laser scanning by circle-fitting methods. Int. J. Appl. Earth Obs. Geoinf. 2017, 63, 122–128. [Google Scholar] [CrossRef]
- Lixin, D. New Development of Forest Canopy Height Remote Sensing. Remote Sens. Technol. Appl. 2016, 31, 833–845. [Google Scholar]
- Haala, N.; Reulke, R.; Thies, M.; Aschoff, T. Combination of terrestrial Laser Scanning with high resolution panoramic Images for Investigations in Forest Applications and tree species recognition. In Proceedings of the Panoramic Photogrammetry Workshop, Berlin, Germany, 24–25 February 2005. [Google Scholar]
- Forsman, P.; Halme, A. 3-D mapping of natural environments with trees by means of mobile perception. IEEE Trans. Robot. 2005, 21, 482–490. [Google Scholar] [CrossRef]
- Forsman, M.; Börlin, N.; Holmgren, J. Estimation of tree stem attributes using terrestrial photogrammetry. In Proceedings of the ISPRS-International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Melbourne, Australia, 25 August–01 September 2012; pp. 261–265. [Google Scholar]
- Yang, B.; Dai, W.; Dong, Z.; Liu, Y. Automatic Forest Mapping at Individual Tree Levels from Terrestrial Laser Scanning Point Clouds with a Hierarchical Minimum Cut Method. Remote Sens. 2016, 8, 372. [Google Scholar] [CrossRef] [Green Version]
- Huang, H.; Li, Z.; Gong, P.; Cheng, X.; Clinton, N.; Cao, C.; Ni, W.; Wang, L. Automated Methods for Measuring DBH and Tree Heights with a Commercial Scanning Lidar. Photogramm. Eng. Remote Sens. 2011, 77, 219–227. [Google Scholar] [CrossRef]
- Strahler, A.H.; Jupp, D.L.B.; Woodcock, C.E.; Schaaf, C.B.; Yao, T.; Zhao, F.; Yang, X.; Lovell, J.; Culvenor, D.; Newnham, G.; et al. Retrieval of forest structural parameters using a ground-based lidar instrument (Echidna®). Can. J. Remote Sens. 2014, 34, S426–S440. [Google Scholar] [CrossRef] [Green Version]
- Lalonde, J.F.; Vandapel, N.; Huber, D.F.; Hebert, M. Natural terrain classification using three-dimensional Ladar data for ground robot mobility. J. Field Robot. 2010, 23, 839–861. [Google Scholar] [CrossRef]
- Xia, S.; Wang, C.; Pan, F.; Xi, X.; Zeng, H.; Liu, H.J.F. Detecting stems in dense and homogeneous forest using single-scan TLS. Forests 2015, 6, 3923–3945. [Google Scholar] [CrossRef] [Green Version]
- Zhu, X.; Skidmore, A.K.; Darvishzadeh, R.; Niemann, K.O.; Liu, J.; Shi, Y.; Wang, T. Foliar and woody materials discriminated using terrestrial LiDAR in a mixed natural forest. Int. J. Appl. Earth Obs. Geoinf. 2018, 64, 43–50. [Google Scholar] [CrossRef]
- Zhang, W.; Wan, P.; Wang, T.; Cai, S.; Chen, Y.; Jin, X.; Yan, G. A Novel Approach for the Detection of Standing Tree Stems from Plot-Level Terrestrial Laser Scanning Data. Remote Sens. 2019, 11, 211. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Lin, X.; Ning, X. SVM-Based Classification of Segmented Airborne LiDAR Point Clouds in Urban Areas. Remote Sens. 2013, 5, 3749–3775. [Google Scholar] [CrossRef] [Green Version]
- Schnabel, R.; Wahl, R.; Klein, R. Efficient RANSAC for Point-Cloud Shape Detection. Comput. Graph. Forum 2007, 26, 214–226. [Google Scholar] [CrossRef]
- Vo, A.-V.; Truong-Hong, L.; Laefer, D.F.; Bertolotto, M. Octree-based region growing for point cloud segmentation. Isprs J. Photogramm. Remote Sens. 2015, 104, 88–100. [Google Scholar] [CrossRef]
- Burt, A.; Disney, M.; Calders, K.; Goslee, S. Extracting individual trees from lidar point clouds using treeseg. Methods Ecol. Evol. 2018. [Google Scholar] [CrossRef] [Green Version]
- Liang, X.; Litkey, P.; Hyyppa, J.; Kaartinen, H.; Vastaranta, M.; Holopainen, M. Automatic stem mapping using single-scan terrestrial laser scanning. IEEE Trans. Geosci. Remote Sens. 2011, 50, 661–670. [Google Scholar] [CrossRef]
- Raumonen, P.; Kaasalainen, M.; Åkerblom, M.; Kaasalainen, S.; Kaartinen, H.; Vastaranta, M.; Holopainen, M.; Disney, M.; Lewis, P. Fast Automatic Precision Tree Models from Terrestrial Laser Scanner Data. Remote Sens. 2013, 5, 491–520. [Google Scholar] [CrossRef] [Green Version]
- Wieser, M.; Mandlburger, G.; Hollaus, M.; Otepka, J.; Glira, P.; Pfeifer, N. A Case Study of UAS Borne Laser Scanning for Measurement of Tree Stem Diameter. Remote Sens. 2017, 9, 1154. [Google Scholar] [CrossRef] [Green Version]
- Pitkänen, T.P.; Raumonen, P.; Kangas, A. Measuring stem diameters with TLS in boreal forests by complementary fitting procedure. Isprs J. Photogramm. Remote Sens. 2019, 147, 294–306. [Google Scholar] [CrossRef]
- Liu, G.; Wang, J.; Dong, P.; Chen, Y.; Liu, Z. Estimating Individual Tree Height and Diameter at Breast Height (DBH) from Terrestrial Laser Scanning (TLS) Data at Plot Level. Forests 2018, 9, 398. [Google Scholar] [CrossRef] [Green Version]
- Zhang, W.; Qi, J.; Wan, P.; Wang, H.; Xie, D.; Wang, X.; Yan, G. An Easy-to-Use Airborne LiDAR Data Filtering Method Based on Cloth Simulation. Remote Sens. 2016, 8, 501. [Google Scholar] [CrossRef]
- Kankare, V.; Puttonen, E.; Holopainen, M.; Hyyppä, J. The effect of TLS point cloud sampling on tree detection and diameter measurement accuracy. Remote Sens. Lett. 2016, 7, 495–502. [Google Scholar] [CrossRef]
- Ferraz, A.; Bretar, F.; Jacquemoud, S.; Gonçalves, G.; Pereira, L.; Tomé, M.; Soares, P. 3-D mapping of a multi-layered Mediterranean forest using ALS data. Remote Sens. Environ. 2012, 121, 210–223. [Google Scholar] [CrossRef]
- Li, W.; Guo, Q.; Jakubowski, M.K.; Kelly, M. A New Method for Segmenting Individual Trees from the Lidar Point Cloud. Photogramm. Eng. Remote Sens. 2012, 78, 75–84. [Google Scholar] [CrossRef] [Green Version]
- Yu, Y.; Li, J.; Guan, H.; Zai, D.; Wang, C. Automated Extraction of 3D Trees from Mobile LiDAR Point Clouds. In Proceedings of the ISPRS-International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Riva del Garda, Italy, 23–25 June 2014; pp. 629–632. [Google Scholar] [CrossRef] [Green Version]
- Berveglieri, A.; Tommaselli, A.M.G.; Liang, X.; Honkavaara, E. Vertical Optical Scanning with Panoramic Vision for Tree Trunk Reconstruction. Sensors 2017, 17, 2791. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Király, G.; Brolly, G. Tree height estimation methods for terrestrial laser scanning in a forest reserve. Geol. Comput. Sci. 2007, 36, 211–215. [Google Scholar]
- Liang, J.; Zhang, M.; Liu, D.; Zeng, X.; Ojowu, O., Jr.; Zhao, K.; Li, Z.; Liu, H. Robust ellipse fitting based on sparse combination of data points. IEEE Trans. Image Process. 2013, 22, 2207–2218. [Google Scholar] [CrossRef]
- Liang, X.; Hyyppä, J.; Kaartinen, H.; Lehtomäki, M.; Pyörälä, J.; Pfeifer, N.; Holopainen, M.; Brolly, G.; Francesco, P.; Hackenberg, J.; et al. International benchmarking of terrestrial laser scanning approaches for forest inventories. ISPRS J. Photogramm. Remote Sens. 2018, 144, 137–179. [Google Scholar] [CrossRef]
- Ravaglia, J.; Fournier, R.A.; Bac, A.; Véga, C.; Côté, J.-F.; Piboule, A.; Rémillard, U. Comparison of Three Algorithms to Estimate Tree Stem Diameter from Terrestrial Laser Scanner Data. Forests 2019, 10, 599. [Google Scholar] [CrossRef] [Green Version]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | |
|---|---|---|
| Data acquisition speed | 976,000 points/s | |
| Maximum range | 153 m | |
| Maximum resolution | Vertical | Horizontal |
| 0.009° | 0.009° | |
| Field of view angle | 300 × 360° | |
| Scanner line speed | 97 Hz | |
| Measurement accuracy | ± 2 mm | |
| Wavelength | 1550 nm | |
| Plot | Mean DBH (cm) | Sum of Trees | Stand Conditions | Density (stems/ha) | Main Species |
|---|---|---|---|---|---|
| Gongan | 26.91 | 160 | leaf-off | 400 | Poplar |
| Wuhan | 33.49 | 122 | leaf-on | 813 | Metasequoia |
| Finland | 16.66 | 84 | leaf-on | 820 | Scots pine |
| Plot | Reference | Mapped | Type I Error | Type II Error | True Culms | Completeness (%) | Correctness (%) | Mean Accuracy |
|---|---|---|---|---|---|---|---|---|
| Gongan | 160 | 160 | 0 | 0 | 160 | 100 | 100 | 100 |
| Wuhan | 122 | 118 | 2 | 11 | 107 | 87.70 | 90.68 | 89.17 |
| Finland | 84 | 78 | 2 | 6 | 72 | 85.71 | 92.31 | 88.89 |
| Plot | Mean Tree Height(m) | Piecewise RANSAC | Piecewise RANSAC Constrained by Growth Direction | ||
|---|---|---|---|---|---|
| Mean Maximum Extraction Height(m) | Mean Integrity (%) | Mean Maximum Extraction Height (m) | Mean Integrity (%) | ||
| Gongan | 27.03 | 17.22 | 63.71 | 22.57 | 83.50 |
| Wuhan | 17.82 | 11.99 | 67.28 | 14.37 | 80.64 |
| Finland | 13.69 | 7.67 | 56.03 | 12.03 | 87.87 |
| Plot | Algorithms | R2 | RMSE (cm) | Bias (cm) | RMSE% | Bias% | Relative Accuracy |
|---|---|---|---|---|---|---|---|
| Gongan | RLSEF | 0.952 | 1.114 | 1.188 | 4.1 | 4.4 | 0.959 |
| RANSAC_EF | 0.871 | 1.2 | 1.400 | 4.5 | 5.2 | 0.955 | |
| RANSAC_CF | 0.838 | 2.161 | 1.683 | 8 | 6.3 | 0.92 | |
| RHT | 0.777 | 1.645 | 1.920 | 6.1 | 7.1 | 0.939 | |
| Wuhan | RLSEF | 0.932 | 1.185 | 0.950 | 3.5 | 2.8 | 0.965 |
| RANSAC_EF | 0.856 | 2.263 | 1.903 | 6.8 | 5.7 | 0.932 | |
| RANSAC_CF | 0.86 | 2.377 | 2.044 | 7.1 | 6.1 | 0.929 | |
| RHT | 0.739 | 2.546 | 2.052 | 7.6 | 6.1 | 0.924 | |
| Finland | RLSEF | 0.978 | 1.12 | 0.876 | 6.7 | 5.3 | 0.933 |
| RANSAC_EF | 0.955 | 1.643 | 1.235 | 9.9 | 7.4 | 0.901 | |
| RANSAC_CF | 0.973 | 1.54 | 1.247 | 9.2 | 7.5 | 0.908 | |
| RHT | 0.897 | 2.233 | 1.951 | 13.4 | 11.7 | 0.866 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ye, W.; Qian, C.; Tang, J.; Liu, H.; Fan, X.; Liang, X.; Zhang, H. Improved 3D Stem Mapping Method and Elliptic Hypothesis-Based DBH Estimation from Terrestrial Laser Scanning Data. Remote Sens. 2020, 12, 352. https://doi.org/10.3390/rs12030352
Ye W, Qian C, Tang J, Liu H, Fan X, Liang X, Zhang H. Improved 3D Stem Mapping Method and Elliptic Hypothesis-Based DBH Estimation from Terrestrial Laser Scanning Data. Remote Sensing. 2020; 12(3):352. https://doi.org/10.3390/rs12030352
Chicago/Turabian StyleYe, WenFang, Chuang Qian, Jian Tang, Hui Liu, XiaoYun Fan, Xinlian Liang, and HongJuan Zhang. 2020. "Improved 3D Stem Mapping Method and Elliptic Hypothesis-Based DBH Estimation from Terrestrial Laser Scanning Data" Remote Sensing 12, no. 3: 352. https://doi.org/10.3390/rs12030352