1. Introduction
The area of protection is currently one of the most important fields in power systems. To protect transmission lines, both directional overcurrent relays (DOCRs) and distance relays are generally used. Transmission lines are monitored by these protection relays from both ends. The occurrence of faults causes relays to activate trip scenarios [
1].
Overcurrent relays (OCRs) generally operate based on the magnitude of the fault current, which is selected within parameters of the relay, whereas DOCRs incorporate the direction of the current flowing through the transmission line. A potential transformer is used to determine the direction of the voltage phasor. DOCRs are thus more costly than traditional OCRs. However, they are more advantageous than OCRs. Those kinds of relays must be set to operate as the backup, with a time delay greater than that of the primary relay [
2].
Distance relay has two main zones. After detecting a fault, the first one begins working immediately. To avoid calculation errors, 80 percent of the transmission line is covered by this zone. The second zone then covers up to 120 percent of the transmission line by delay time. This large area also includes a portion of another transmission line [
3].
The main issue in this paper is about the reduction of the operating time of the protection relay in order to provide the protection devices with the ability to isolate the fault area. This extends the lifespan of the components of the power system, making the system more reliable and healthier. However, because of constraints between DOCRs pairs and DOCRs and distance relay pairs, DOCRs and distance relays have more constraints and complex coordination problems. The miscoordination of these protection relays overlaps protection operations and fails to take advantage of the benefits of both distance and DOCR relays [
4,
5].
The contribution of RES-based distributed generators (DGs) to a distribution system is important. RES such as solar and wind energy are integrated into power systems. Many challenges are presented by DGs and problems with coordination, some of which include the change in the flow of the direction of fault currents and their magnitude [
6].
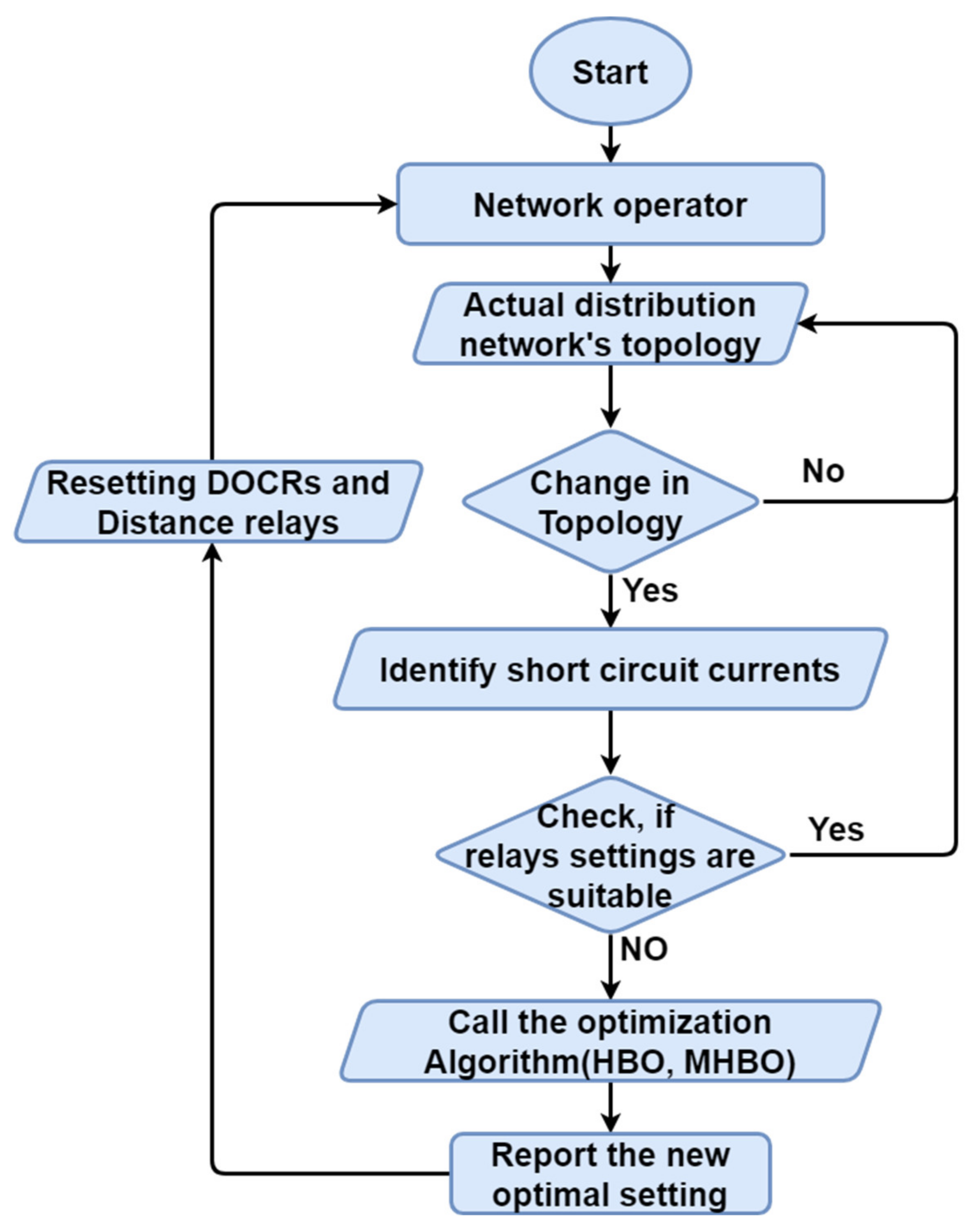
Due to the impact of DGs on distribution networks, the protection system necessitates a flexible structure. In order to solve the problem of protection relays coordination, this research presents the adaptive protection scheme (APS) as a solution for this challenge. APS enables the changing of relay settings for both DOCRs and distance relays in response to any changes in the state of a network, based on the DG’s ON/OFF states, using predetermined settings. APS, as a component of information and communication technologies (ICT), is primarily dependent on the communication network between smart grid components, or on SCADA. These communication networks enable APS to remotely set relay settings. APS is tested with a variety of scenarios that are most likely to trip in-network, and the best protection relay setting in each scenario is determined. This enables the protection system to reduce miscoordination and malfunction. The primary benefit of APS is to improve the selectivity and reliability of the protection system over traditional or fixed systems. The APS configures a group of protection relays that are determined by calculating optimal settings for each scenario using an optimization algorithm based on the DG’s states [
7,
8].
Adaptive systems are designed to work on real-time systems. They need fast methods to rearrange their system’s items. Hence, the APS uses the optimization algorithm due to its fast performance. APS is addressed in many research papers, which were developed based on optimization algorithms such as particle swarm optimization (PSO) in [
9], genetic algorithm (GA) in [
10], differential evolution algorithm (DEA) in [
11], ant colony optimization (ACO) in [
12], firefly algorithm (FA) in [
13], gravitational search algorithm (GSA) in [
14], manta ray foraging optimization (MRFO) in [
7], and hybrid Harris hawks optimization (HHO) in [
15] in order to coordinate the process of DOCRs.
In [
1], APS was used to coordinate DOCRs and distance relays using school-based optimization algorithm (SBO) and its modified algorithm (MSBO). In this paper a new APS is suggested to solve the same coordination problem between DOCRs and distance relays but with a better optimal solution.
Usually, Metaheuristic optimization algorithms start with initial values, which are generated randomly to form their population, but this population between search space is limited. The optimization algorithm is used to improve the fitness of that population. Always metaheuristic optimization algorithms are formed by intrapopulation collaboration as the standard form.
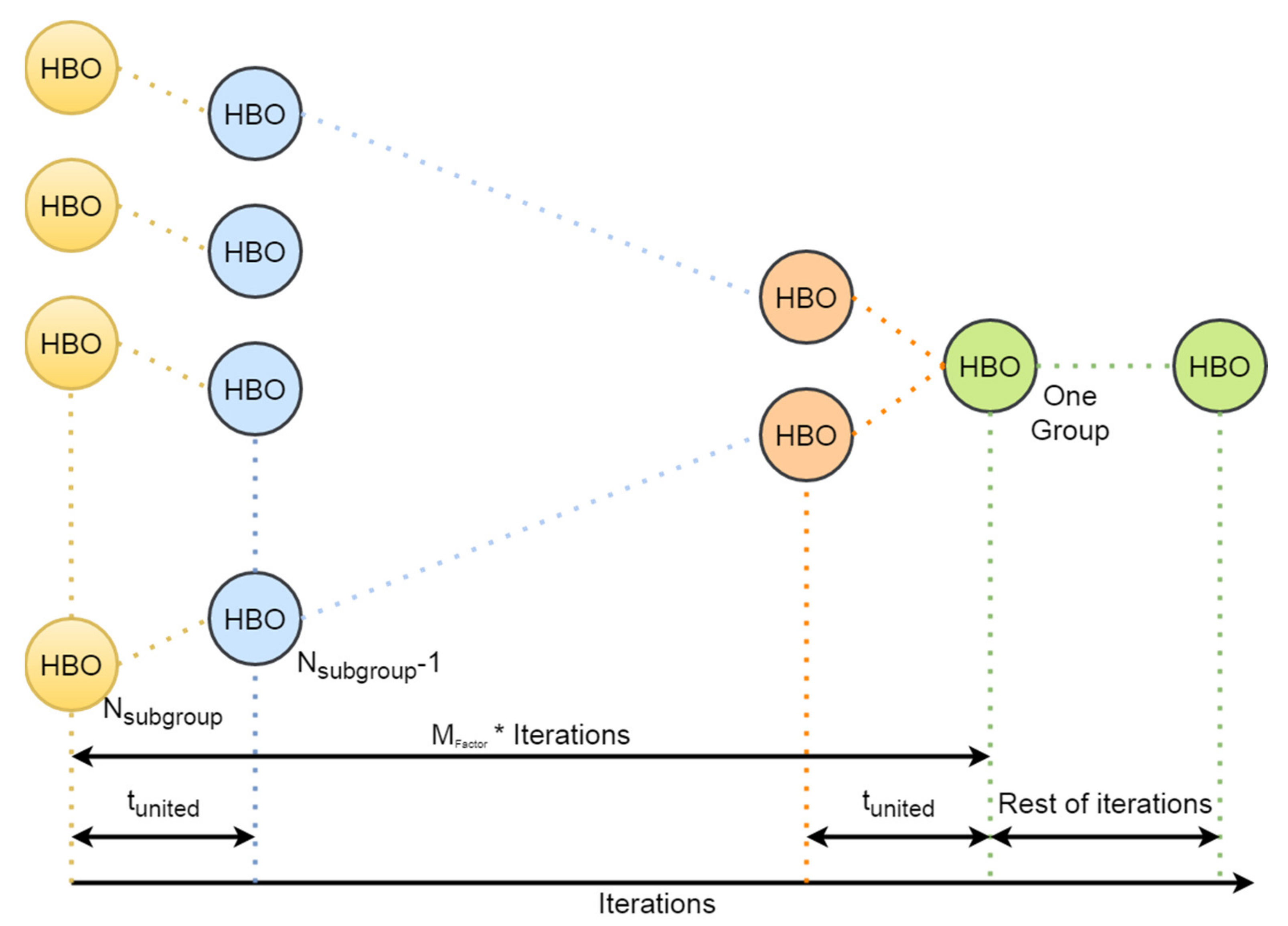
Collaborative multi-population is a term that aims to introduce the SBO. This term is based on dividing the population into subgroups. This step is useful to increase its exploration performance.
As presented in SBO, which is a collaborative multi-population framework utilized by TLBO, the proposed modified algorithm is based on its original idea, which gives it the capability to increase its exploration performance [
16].
This research work suggests a novel idea, which is about the collection of sub-groups into one main group after exploration is exploited. This idea improved the exploitation part by the search for an optimal solution with all populations of sub-groups. This idea balances both optimization algorithms performances exploration and exploitation. This balance is conducted with a new factor called .
There are many challenges for this idea; one of them is determining of the , which depends on the user’s experience to face the problem of balance between exploitation and exploration, and the other one is about how to determine the subgroups’ number. These challenges are faced with the experience of users or trial and error to have a good performance of the optimization algorithm.
HBO is presented in [
17] and applied in many other engineering optimization problems, such as solar cell estimation [
18], reactive power dispatch [
19], Micro-grid design and sizing [
20], and Proton exchange membrane fuel cell [
21]. HBO solves these optimization problems with effectiveness.
There are other methods that are used to build APS, such as an environment APS based on Q-learning as in [
22] and multi-agents as in [
23,
24].
Contributions of this paper are as follows:
The proposed algorithm’s response and convergence characteristics are improved by modifying the original HBO algorithm. There are three main points that were modified: subgroups were divided and then united, traveler agents were placed between subgroups, and an equation in the original HBO was modified. This algorithm would be useful in addressing other critical issues in other branches of the power system, such as microgrid, DG sizing, load frequency control, and solar cell parameter estimation.
As a solution to the DG impact, an adaptive protection scheme was designed based on HBO and MHBO. That APS was used to coordinate both DOCRs and distance relays. In addition to the impact of DGs, the effect of distance relays complicates this co-ordination problem in the DOCR’s coordination process.
To verify the effectiveness of the proposed protection system, it was tested on IEEE 8-bus and IEEE 14-bus distribution networks, taking into account the effect of DG on/off states.
The following is the rest of the paper: the coordination problem and its mathematical modeling are presented in
Section 2. The proposed protection scheme is presented in
Section 3. The performance of HBO and MHBO with IEEE 8-bus and IEEE 14-bus distribution networks to solve the coordination problem is then presented in
Section 4. Finally,
Section 5 has the conclusions.
2. The Mathematical Modelling of Coordination Problem
The primary goal of this paper is to achieve the best possible coordination of DOCRs and distance relays. The objective function (
OF) is the total operation times of the DOCRs at both near (
TNear) and far (
TFar) ends, as well as the second time zone of the distance relays (
TZ2). That
OF is the shortest total operation times as described in [
1]:
The international electro-technical commission (IEC) standard presents the standard time inverse of DOCRs characteristics by the following equation [
2]:
where
Ti is the relay’s operation time of DOCRs for
ith relay,
TDS is the relay’s time dial setting, and
Ip is the relay’s pickup current. The other constants α,
, and
have values of 0.14, 0.02, and 1, respectively [
25].
2.1. Problem’s Limiters
The maximum operation time (
Tmax) is the primary limitation of any protection relay. In order to save the components of the power system from damage, this time should not exceed 2 s [
26].
Relay’s settings are limited with minimum and maximum values for each setting, as shown in the following equations [
27]:
2.2. The Problem’s Constraints
Through the constraints between the primary and backup pair of DOCRs, as well as between the pair of DOCRs and distance relays at both ends, the proposed optimization problem becomes a higher constraint problem. These constraints are used to prevent miscoordination, which can occur when protection relays fail.
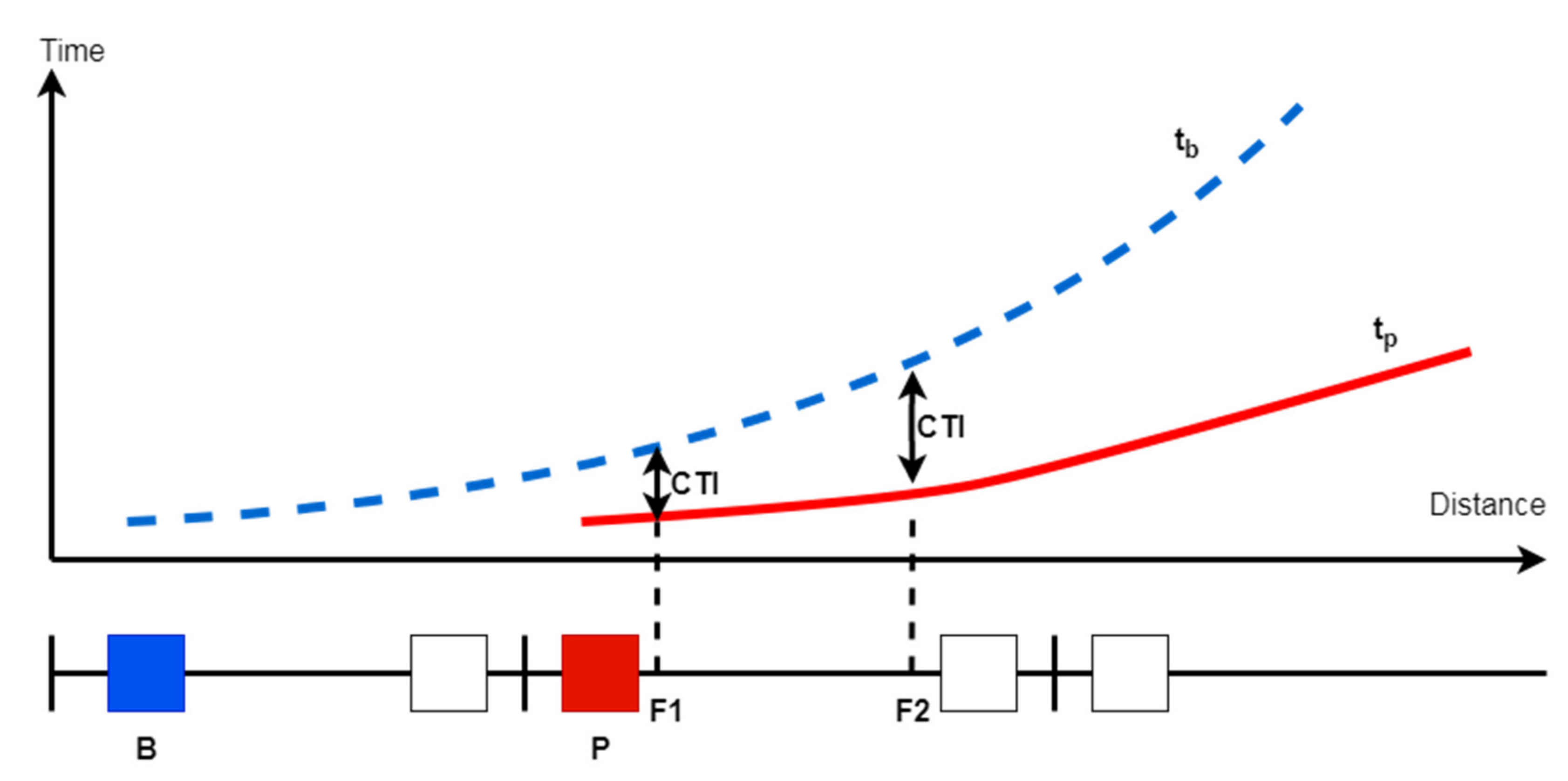
As shown in
Figure 1, the relationship between DOCRs pair relays must deal with the backup relay (
), which operates with a delay time on the primary relay (
). This period of delay time is referred to as the coordination time interval (
CTI). The
CTI value is determined by the type of protection relays. The
CTI value for electromagnetic relays must be greater than 0.3 s, while digital relays must be greater than 0.2 s [
1]. In this research, digital relays are used. These constraints are depicted in the following equations [
27,
28]:
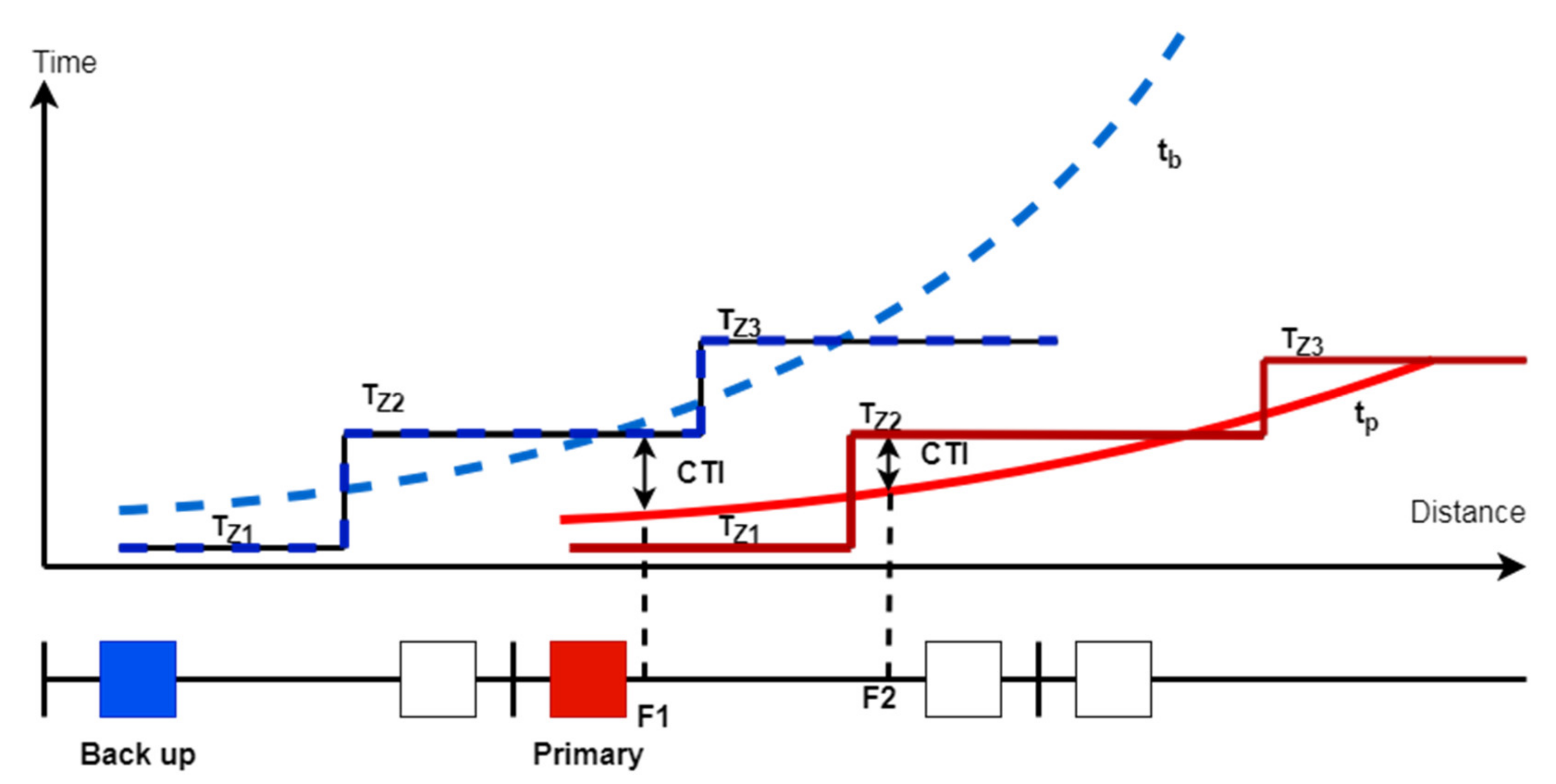
Figure 2 depicts the relationship between DOCRs and distance pair relays. At the near end, the backup distance relay liaises with the primary DOCRs relay, and
TZ2b must delay
with the
CTI as described in Equation (8). While Equation (9) describes the distance and DOCRs relationship at the far end. The second zone of the primary distance relay (
TZ2p) must delay the primary DOCRs operation time (
) with
CTI at the far end [
27].
Based on the operation time of the primary relay at near and far ends. The relationship is developed to specify the minimum value of the distance relay’s second zone. As shown in Equation (10), the maximum value of these equations is used as the time for the specific second zone of distance relay. This point contributes to the reduction of the penalty and constraints [
1].
For eliminating miscoordination between pairs relays, as recommended, the penalty function is developed as in the following equation [
29]:
where
is the penalty function‘s weighting factor.
When there is a miscoordination between relays pair, Fpen extends the total time of OF. As a result, the optimization algorithm tunes the relays setting parameters to reduce the size of OF to eliminate the miscoordination.
4. Results and Discussion
In this research work, APS used both HBO and MHBO to tune optimal relay coordination problem in all cases of test systems. These relay’s settings were
TDS,
Ip, and
TZ2. DOCRs have normal characteristic values such as 0.14, 0.02, and 1.0 for
α,
β, and
γ constants, respectively. In addition to the maximum and minimum values of
TDS and PS as 1.1 s and 0.1 s for
TDS and 4 and 0.5 for PS. Moreover, the maximum operating time for the primary DOCRs or distance relays was 1.5 s [
27].
The test systems were IEEE 8-bus test system and IEEE 14-bus distribution network. The test system’s cases were the normal grid topological, and the other was a switch on the DGs on the grid. Optimal settings were used to reduce the operation time of relays and also for passing the system’s constraints in both the near end and far end. These constraints were between DOCRs and Distance relays. These protection devices were assumed as digital relays with
CTI equal to 0.2 s [
1].
The proposed algorithms that were used in this paper have a population, max iteration, maximum travel percentage, society, and with values 840, 1000, 10%, 8, and 10%, respectively. MATLAB R2016a was used to run these algorithms. While ETAP 12.6.0 was used for the validation of the relay’s operation times and the calculated 3 phase fault currents.
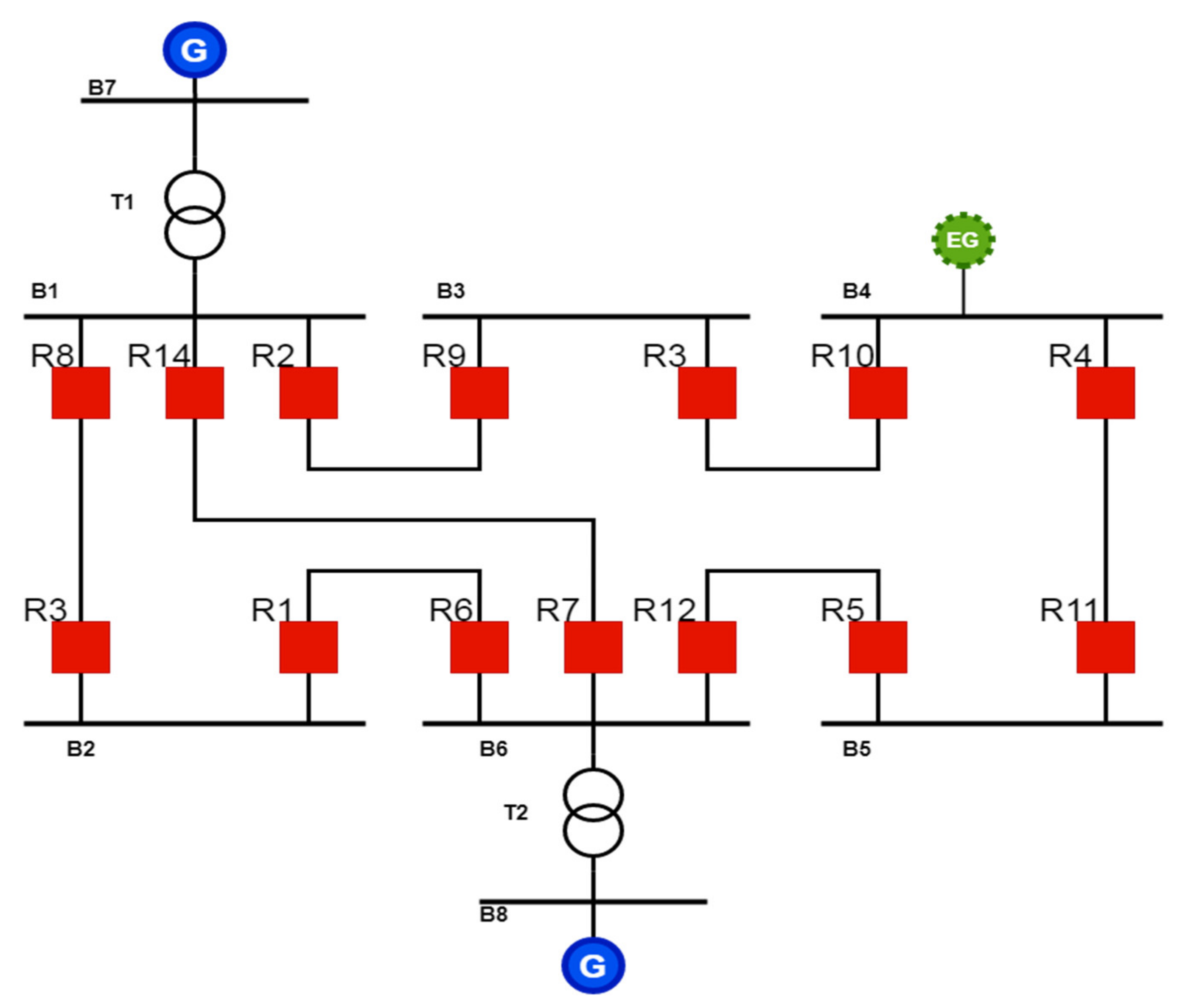
4.1. Test System I: IEEE 8-Bus Test System
The IEEE 8-bus test system, shown in
Figure 5, consists of 7 transmission lines connected between 8 buses and feeds 4 loads from two synchronous generators. These generators feed the network by power transforms
T1, and
T2. This configuration will be considered as the normal topology. In order to investigate the performance of the proposed APS for relays coordination, an external 400 MW microgrid (EG) will be integrated into the system at the fourth bus (B4). The test system has 14 CB, each transmission line has two circuit breakers (CBs), that are activated by the APS. Furthermore, the protection settings are allowed to be changed according to the change of the grid topology [
31].
The optimization problem aims at tuning 42 design variables. In addition to 40 constraints between DOCRs and distance relays, and 32 constraints between DOCRs in normal grid topology, while in the other case is 34 constraints. This makes that optimization problem a highly constrained problem adding to it is a non-linear problem. Each variable design is limited with maximum and minimum limiters.
Three-phase fault currents and CT values are extracted from [
1].
The optimal values of variables designed for protective relays on the normal grid topology using MHBO and HBO are listed in
Table 1. Additional to the other case about the external grid is the switching on of the optimal solution. Then
Table 2 shows that the proposed algorithm’s optimal solution passed the constraints between DOCRs, and between DOCRs and Distance. Whiles constraints pass in both between DOCRs, and between DOCRs and Distance, as shown in
Table 3.
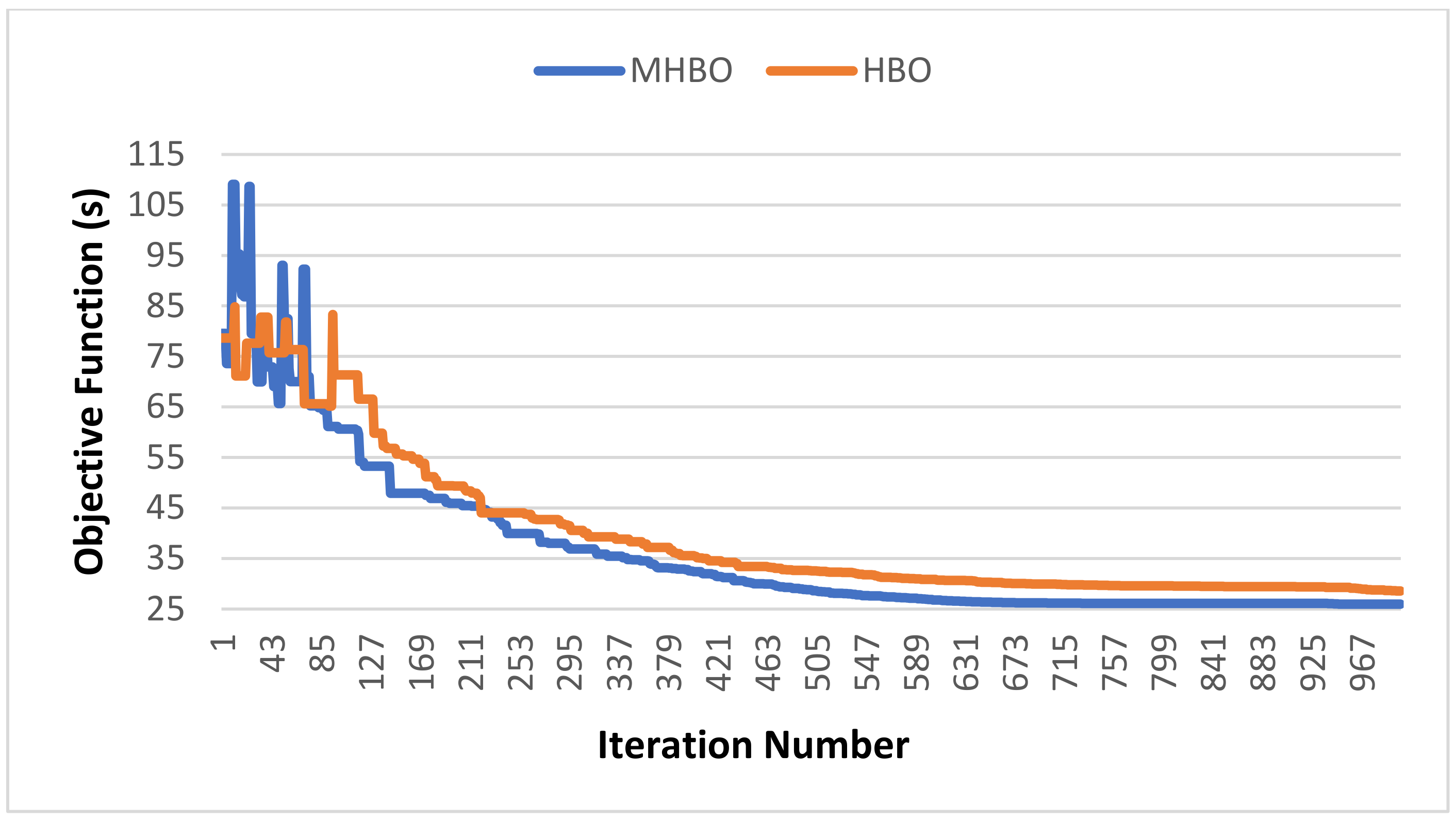
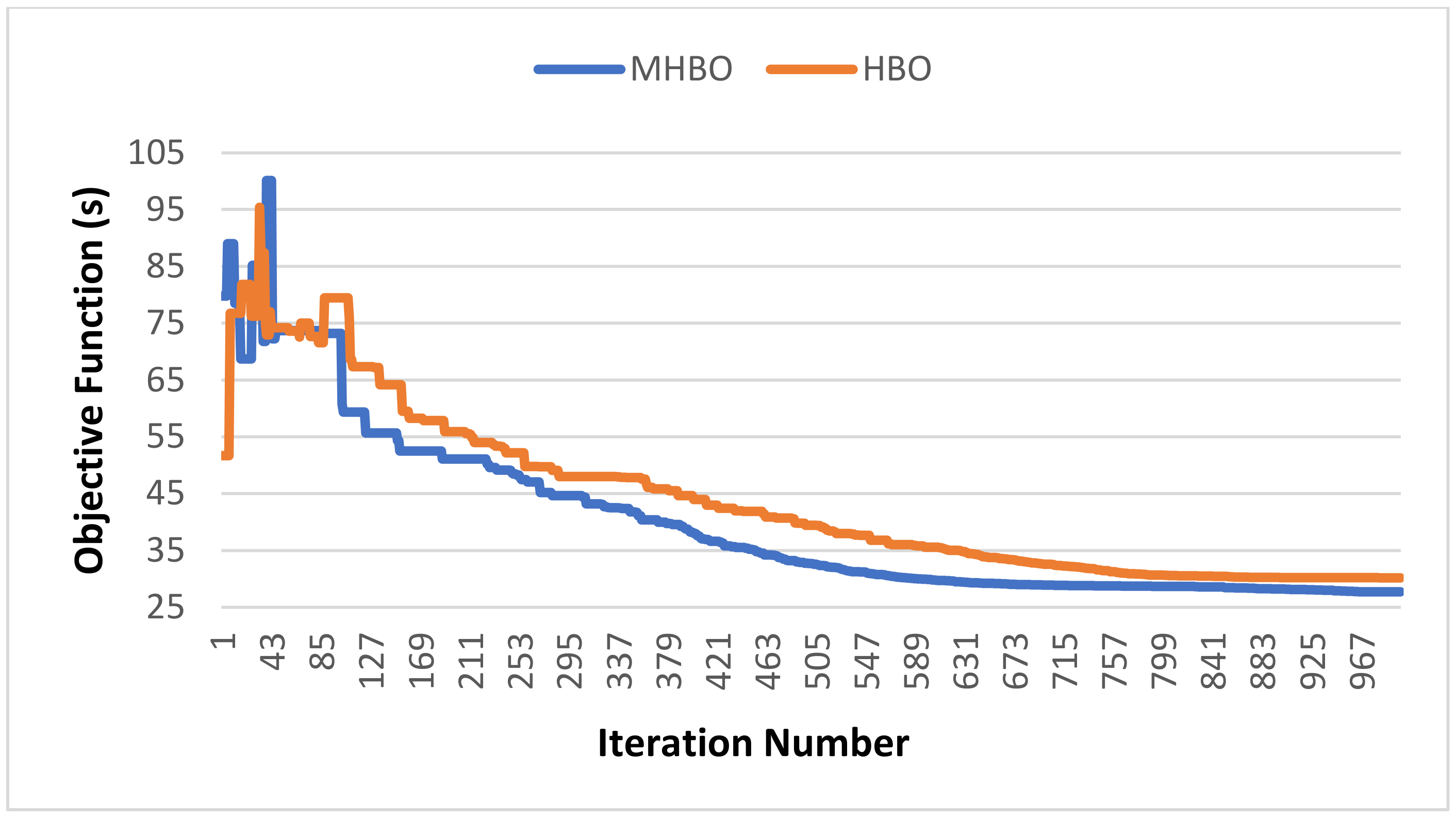
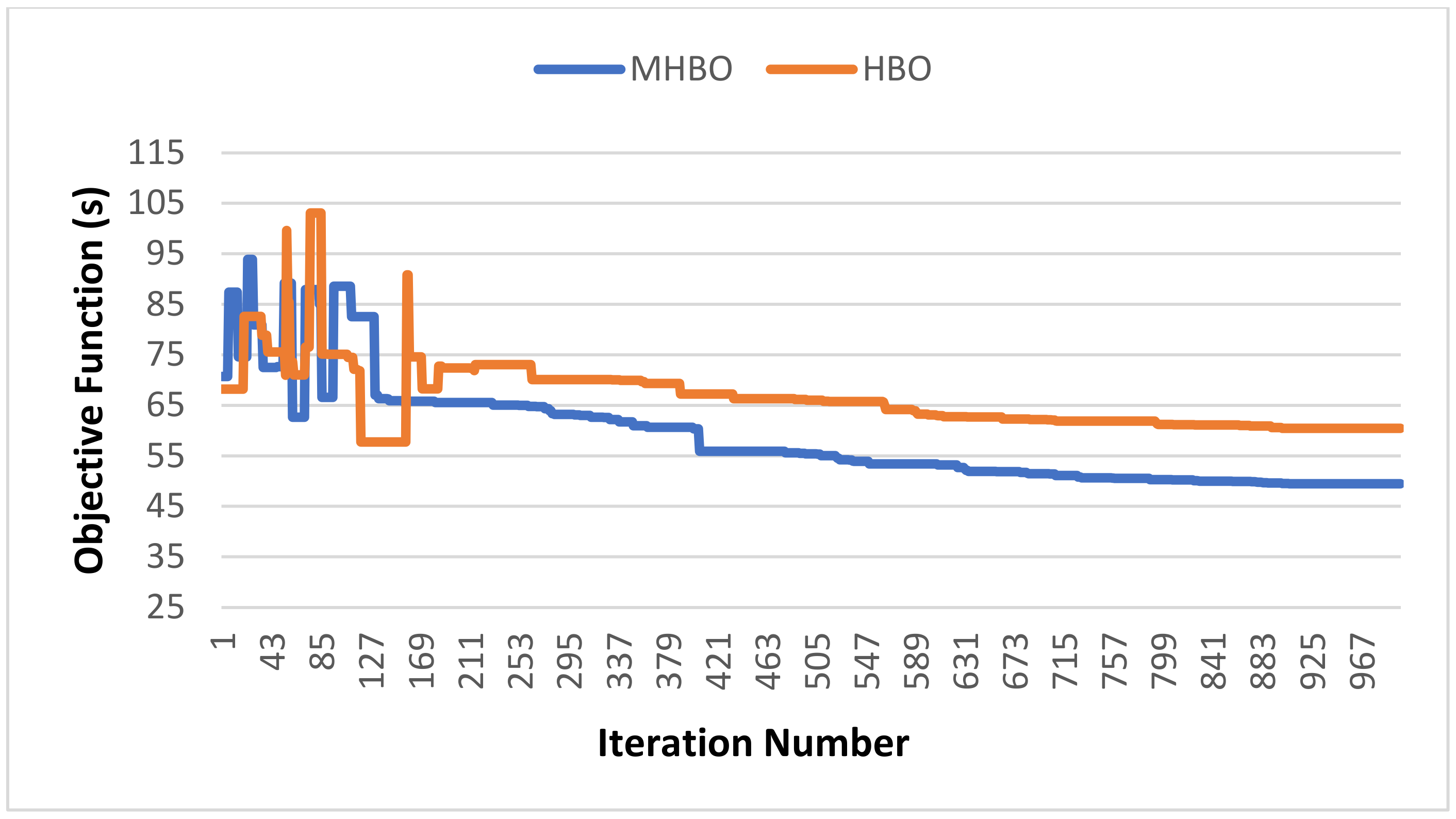
Figure 6 shows the convergence characteristics curves of HBO and MHBO in the case of the original case of the grid, whiles
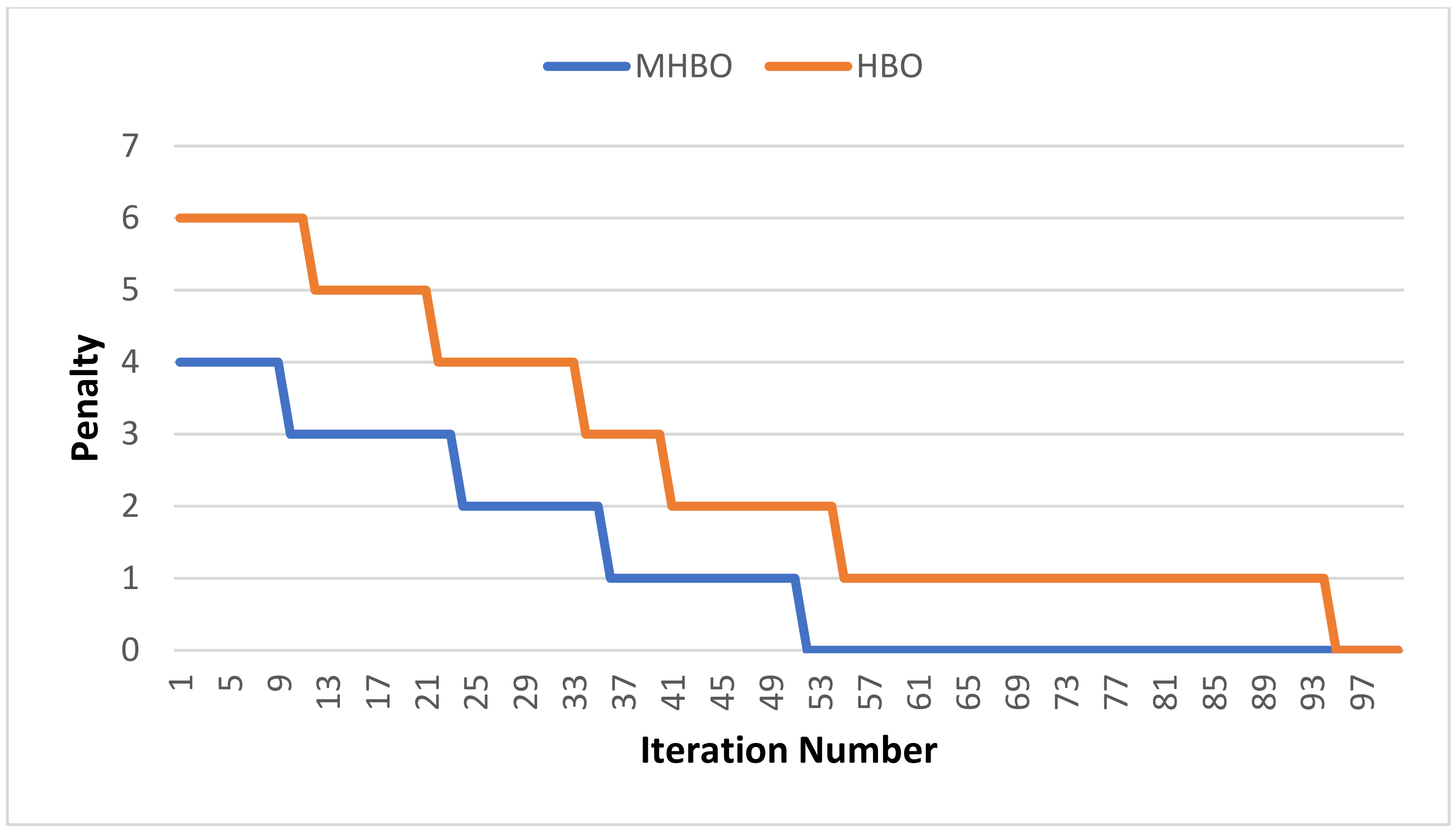
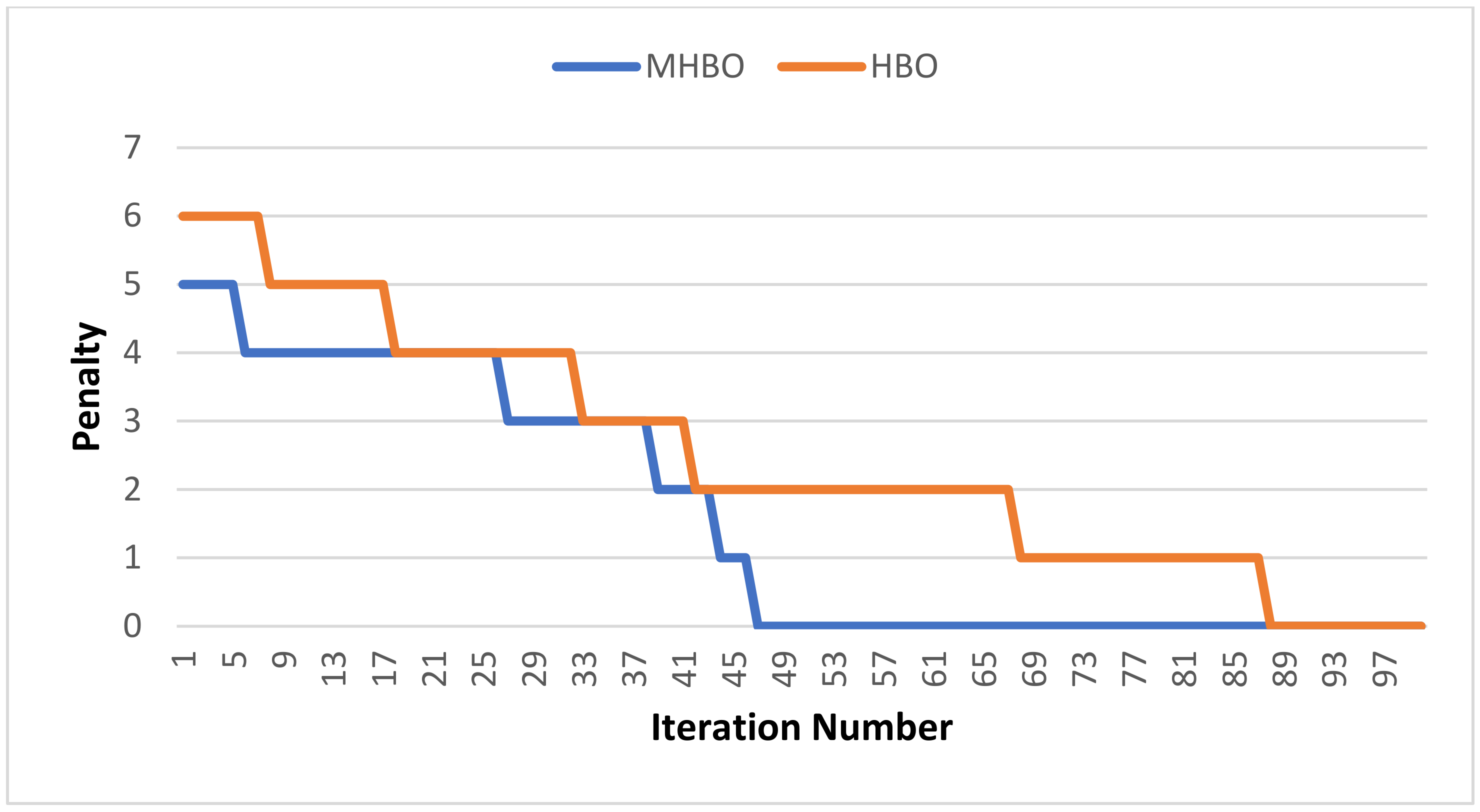
Figure 7 deals with the other case. The penalty is shown in
Figure 8. This is for HBO and MHBO in the original case of the grid, while in the other case, the penalty is shown in
Figure 9.
Previous results proved the ability of the proposed APS to coordinate protection relays at IEEE 8-bus with reliability and suitable settings. In addition to avoiding miscoordination within limiters. APS has a more effective performance based on the MHBO than based on HBO. That is shown by the convergence characteristics. The convergence of MHBO is faster and better than the original HBO. In addition, the modified algorithm avoids constraints faster, as presented by the penalty meter. That proved the ability of the modified algorithm to increase its exploitation and exploration performances.
4.2. Test System II: IEEE 14-Bus Distribution Network
The IEEE 14-bus distribution network is a downstream section of the IEEE 14-bus test system, as shown in
Figure 10 [
32]. This distribution network has 16 CBs to save its transmission lines, adding it is developed by adding 2 DGs, which are connected at the fifth bus and seventh bus. These DGs are synchronous generators with 5 MVA power rated and power factor of 0.9 lagging. That developed network is discussed in [
33].
Three phases short circuit values and CT values are shown as in [
28,
32].
In this distribution network, protective relays have 48 variables design, which is required to be tuned by APS in both cases. The normal grid topology and the 2 DGs are switched on. Those variables design limited the minimum and maximum limiters. In addition to that, the coordination problem is constrained by 41 between DOCRs and 44 between DOCRs, and Distance relays. These constraints formed in the near end and the far end.
Optimal values tuned using HBO and MHBO are tabulated in
Table 4. They are in cases of the original topology of the grid and after the DGs are switched on.
Table 5 shows that the APS passed the constraints between DOCRs and between DOCRs and Distance relays, respectively. The APS passed constraints between DOCRs, and between DOCRs, and distance relays, as shown in
Table 6.
The convergence characteristics curves of HBO and MHBO are shown in
Figure 11 and
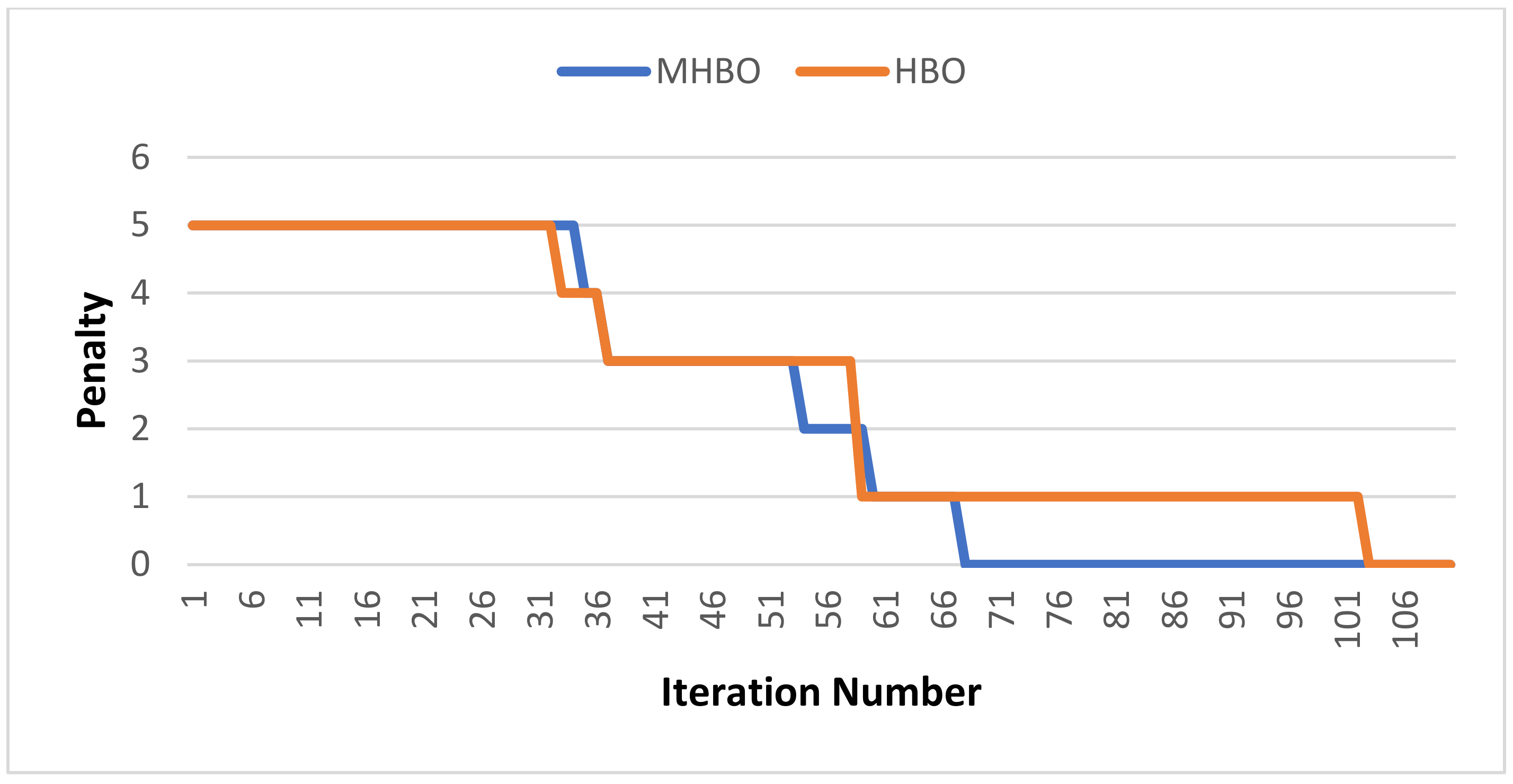
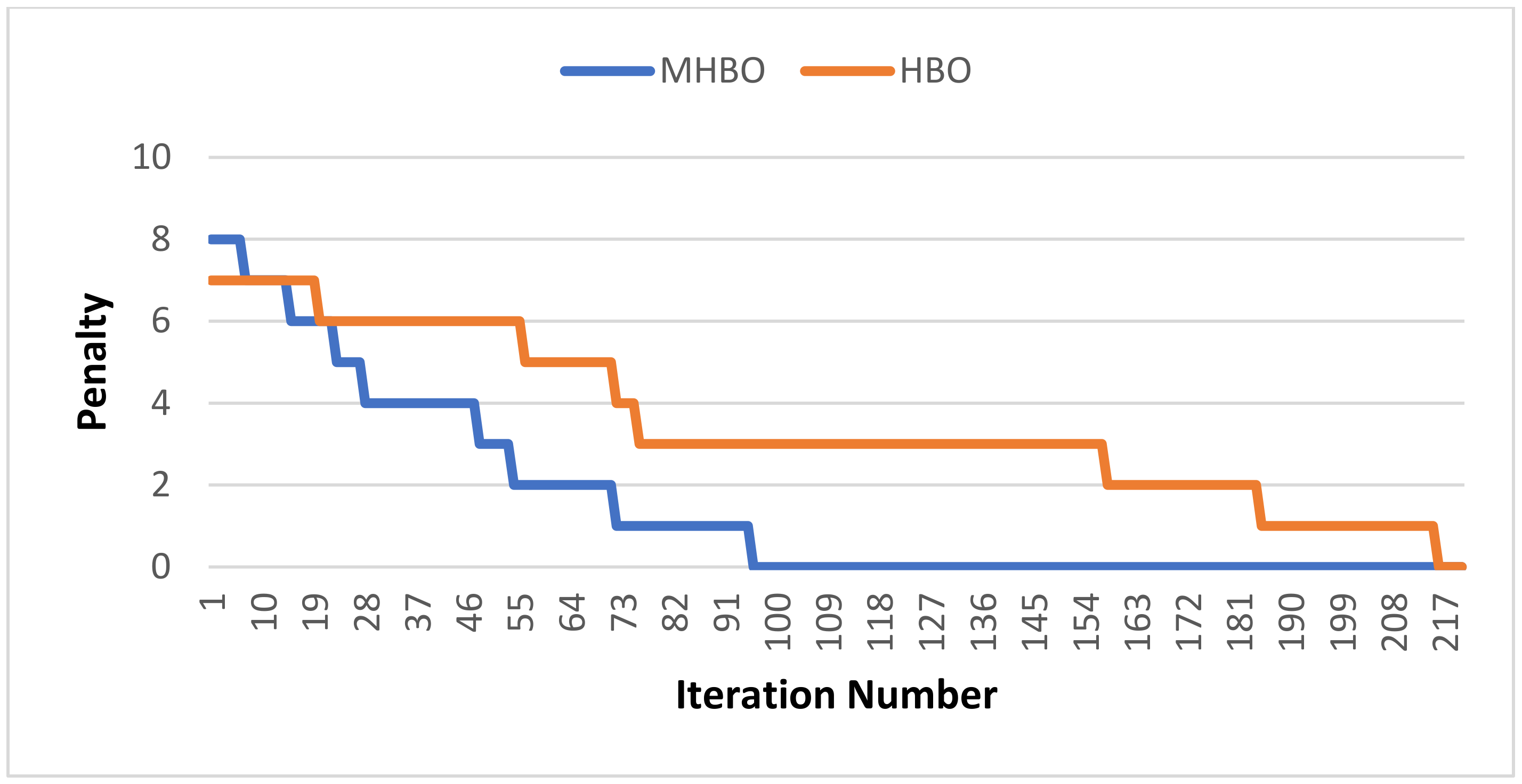
Figure 12, which occurred in the traditional grid and after switching DGs on, respectively. The penalty of HBO and MHBO are shown in
Figure 13 and
Figure 14 to present the penalty in the traditional grid and the other case, respectively.
As demonstrated through the results and performance of the proposed APS in the coordination process of protection relays at the IEEE 14-bus distribution network, the following can be stated: APS tuned settings of distance and DOCRs with suitable settings, the protection system has reliability, effectiveness, and fast performance. APS based on MHBO has better convergence characteristics and better solutions than APS based on HBO. MHBO has better convergence and needs less iteration to avoid miscoordination based on penalty than HBO. This proves that MHBO improved its exploitation and exploration performance.
4.3. Verification of MHBO Using ETAP 12.6.0
Results tuned by the MHBO algorithm are verified using the ETAP. All cases developed based on three-phase faults happened in both the near end and the far end of the following transmission lines:
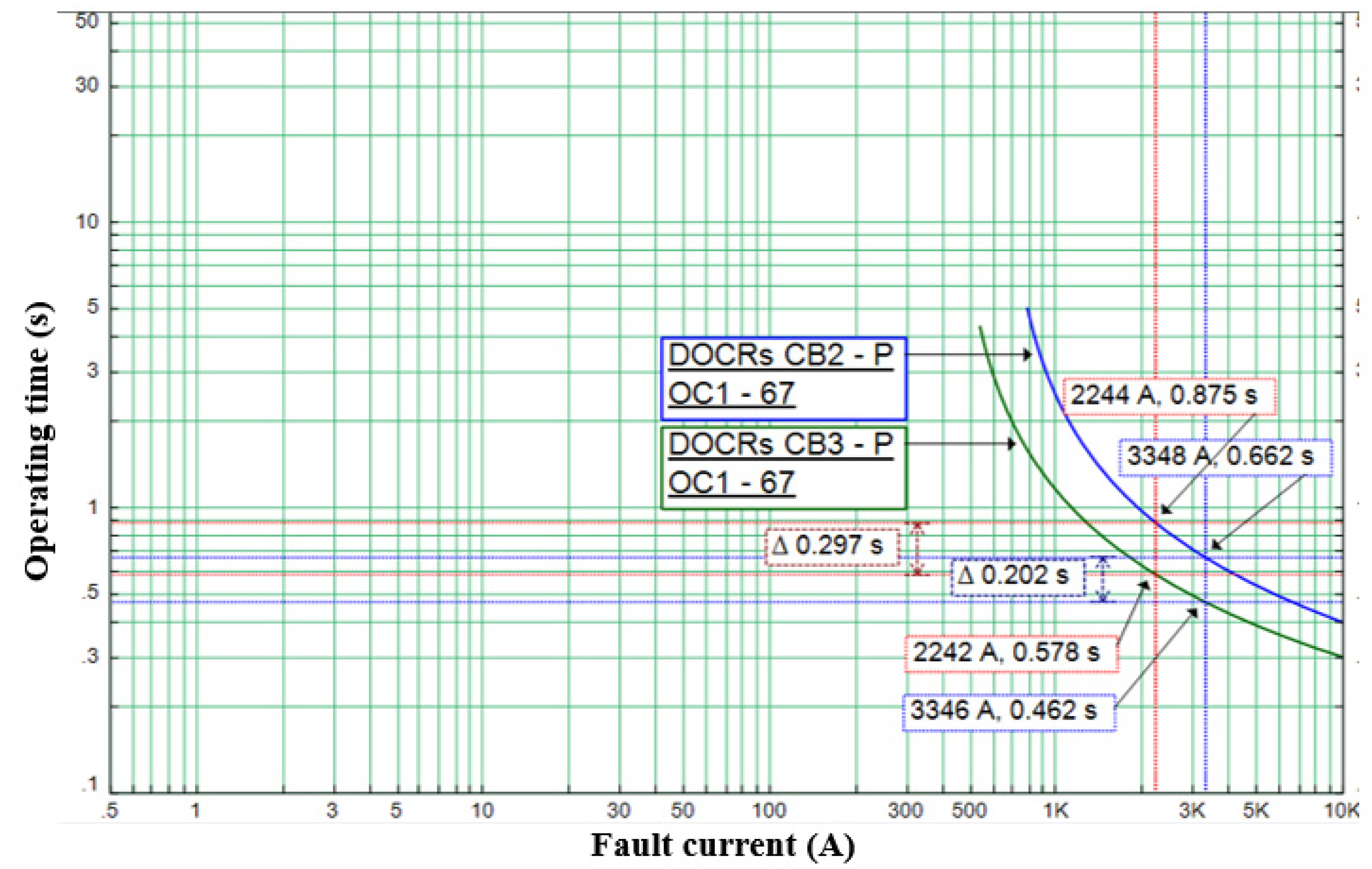
The first case is at the transmission line between the 3rd and 4th bus-bars. As shown in
Figure 15, ETAP’s simulation is shown at the near end, operation times of pair relays 3 and 2 operate at 0.662 s, and 0.462 s, respectively, while at the far end, operating times are 0.875 s and 0.578, respectively.
ETAP’s simulation is also conducted, however, in this case, at the transmission line between 5th and 6th bus-bars. As shown in
Figure 16, in this case, the operations time of pair relays 5 and 4 at the near end are 0.295 s and 0.496 s, respectively, while at the far end are 0.611 s and 1.98 s, respectively.
For the last case, the simulation is as shown in
Figure 17, which is conducted at the transmission line between the 1st and 3rd bus-bars. That figure shows the operation times of pair relays 9 and 10 at the near end, which is 0.295 s and 0.494 s, respectively, whereas at the far end, they are 2.32 s and 0.611 s, respectively.
Simulations confirm that APS based on MHBO has the ability to coordinate protection relays without miscoordination between DOCRs since all CTI is equal or more than 0.2 s, and the operation times are within limits.
4.4. Statistical Results
Table 7 provides the statistical analysis of the proposed algorithms for HBO and MHBO. Each algorithm has a maximum value (Max), minimum value (Min), Mean of runs, and standard deviation (STD) of runs. The number of runs was 15 for each algorithm at each test case. These results proved that MHBO had better statistic parameters than HBO. Moreover, STD shows MHBO was more stable than HBO in all test cases. Therefore, MHBO has the ability to keep stable performance with more complex distribution networks. However, HBO has more variance with more complex distribution networks.
4.5. Comparison Study
In this paper, APS is designed to coordinate DOCRs and distance relays. That novel issue was discussed in [
1] and presented APS based on the SBO algorithm and its modification. Those techniques are recent techniques and have effective performances to design APS.
Table 8 presents the APS’s results based on different optimization algorithms.
From this table, MHBO has the best results in all test cases. At the same time, HBO has better solutions than MSBO and SBO in two cases. These cases are the IEEE 8-bus test system with EG switched ON case, and the normal IEEE 14-bus distribution network case and the other test cases HBO does not present an impact to the design of APS.
4.6. Applying APS in Real Power System
APS requires many hardware components to be applied in the real power system [
34]. Those hardware components are the following:
Protection relays include microprocessors.
A central computer system to collect data from sensors, estimate DGs states, and apply algorithm to tune relay’s setting.
A communication infrastructure to connect protection relays with the central computer system.
5. Conclusions
In this research work, APS is proposed based on MHBO. The developed algorithm succeeded to overcome challenges in the area of coordination problem between protection relays. The simulated results show that APS has the ability to coordinate DOCRs and distance relays with suitable settings to solve the problem of distribution networks equipped with DGs. APS allows the power system to investigate both distance and DOCRs benefits with increased reliability. The modified algorithm (MHBO) makes APS more effective in resolving the coordination, as it has better convergence characteristics curves and optimal values than other previously suggested algorithms. The proposed algorithm reduces the relays time settings below the maximum operation times and within allowed limits. Finally, primary and backup relays are set without miscoordination at any end.
MHBO is an effective optimization algorithm but limited with the experience of users to identify its special parameters such as M factor, , and . They are depended on the optimization problem.
For future works, those parameters will be used to modify other optimization algorithms. In Addition, MHBO will be used with other optimization problems. Moreover, we will try to design APS with better performance and characteristics to deal with the impact of DG, and tested in real large-scales networks.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}